SKRIPSI
Skripsi ini disusun untuk memenuhi salah satu syarat kelulusan menempuh
pendidikan program Sarjana di Program Studi Teknik Elektro
Oleh:
ARI TRI OVERA 13110007
PROGRAM STUDI TEKNIK ELEKTRO FAKULTAS TEKNIK DAN ILMU KOMPUTER
viii
1.7 Sistematika Penelitian………... 4
BAB II LANDASAN TEORI 2.1 Logika Fuzzy... 5
2.1.1 Himpunan Fuzzy ... 6
2.1.2 Fungsi Keanggotaan ... 7
2.1.3 Operasi Logika Fuzzy ... 9
2.1.4 Tahapan Membangun Logika Fuzzy ... 10
2.1.5 Fuzzy Interface System ... 11
2.2 Sensor Jarak Ultrasonik (SR-04) ... 13
2.3 Optocoupler ... 15
2.4 Pulse Width Modulation (PWM) ... 17
2.4.1 PWM Sebagai Pengatur Kecepatan Motor DC ... 18
2.4.2 PWM Sebagai Pengatur Sudut Motor Servo ... 19
ix BAB III PERANCANGAN ALAT
3.1 Perancangan Sistem ... 28
3.1.1 Bagian Masukan (input) ... 29
3.1.2 Bagian Process ... 30
3.1.3 Bagian Keluaran (Output) ... 30
3.2 Perancangan Perangkat Keras (Hardware) ... 31
3.2.1 Perancangan Sistem Minumum AVR ATmega 32 ... 32
3.2.2 Rangkaian Sensor Ultrasonik SR-04 ... 34
3.2.3 Rangkaian Optocoupler ... 35
3.2.4 Rangkaian Driver Motor DC (L298) ... 37
3.2.5 Rangkaian Motor Servo ... 38
3.3 Perancangan Perangkat Lunak (Software) ... 39
3.4 Gambaran Sistem ... 41
3.4.1 Mobil Maju Mencari Space Parkir ... 41
3.4.2 Proses Parkir ... 43
3.5 Logika Fuzzy Pada Sistem Pemandu Kendaraan Untuk Parkir Paralel Secara Otomatis ... 45
BAB IV PENGUJIAN DAN ANALISIS 4.1 Pengujian Dan Analisis Sistem ... 49
4.1.1 Pengujian Logika Fuzzy ... 49
4.1.2 Pengujian Sensor SR-04 ... 54
4.1.3 Pengujian Optocoupler ... 55
4.1.4 Pengujian PWM Sebagai Pengatur Kecepatan Motor DC ... 56
4.1.5 Pengujian PWM Sebagai Pengatur Sudut Motor Servo ... 57
4.1.6 Pengujian Sensor SR-04 ... 54
4.2 Pengujian Sistem Secara Bertahap ... 60
4.2.1 Mobil Maju Mencari Ruang (Space) Parkir ... 60
4.2.2 Proses Parkir ... 63
x BAB V PENUTUP
5.1 Kesimpulan ... 70
5.2 Saran ... 72
74
Faizun, Mohammad. 2010. “Pemograman Mikrokontroler ATMega Dengan CV
AVR Dan Simulasi Proteus Edisi Kedua”.Yogyakarta : Edumacs Publisher
Yanan Zhao And G.Collins,Jr. 2005. “Robust Automatic Parallel Parking In Tight Spaces Via Fuzzy Logic”.
Yanan Zhao And G.Collins,Jr. 2005. “Fuzzy Logic of Autonomous Vehicle for Parallel Parking Maneuver”.
Young-Woo Ryu, Se-Young Oh, and Sam-Yong Kim 2008. “Robust Automatic Parking without Odometry Using an Evolutionary Fuuzy Logic Controller”.
Monica (2011). “Sejarah Logika Fuzzy.” Terdapat di :
http://intanbrilliant-monica.blogspot.com/2011/09/sejarah-logika-fuzzy.html, diakses tanggal 25
November 2013.
Fahmizal (2010). “Fuzzy Logic.” Terdapat di : http://fahmizaleeits.wordpress.com/category/kuliah-kontrol/fuzzy-logic/, diakses
tanggal 25 November 2013.
Romadhon, Wahyu (2013). “Fuzzy Logic.” Terdapat di : http://wahyu-umiq.blogspot.com/2013/03/fuzzy-logic.html, diakses tanggal 03 Desember 2013.
____(2007). “Logika Fuzzy.” Terdapat di : http://logikafuzzy.blogspot.com/,
diakses tanggal 03 Desember 2013.
____(2011). “Sekilas tentang sejarah logika fuzzy.” Terdapat di :
http://hindriyanto.wordpress.com/2011/04/29/sekilas-tentang-sejarah-logika-fuzzy/, diakses tanggal 03 Desember 2013.
____(2013). “Fungsi Keanggotaan Logika Fuzzy.” Terdapat di :
http://belajaritsaja.com/pemrograman/fuzzy/fungsi-keanggotaan-logika-fuzzy,
75
____(2013). “Sistem Inferensi Fuzzy (Fuzzy Infernce System/FIS).” Terdapat di :
http://www.metode-algoritma.com/2013/06/sistem-inferensi-fuzzy-fuzzy-inference.html, diakses tanggal 05 Desember 2013.
____(2013). “Tutorial Pemrograman Fuzzy Logic”. Terdapat di :
http://amarnotes.wordpress.com/2013/11/09/tutorial-pemrograman-fuzzy-logic-1/#more-280, diakses tanggal 21 Desember 2013.
____(2012). “DASAR TEORI MIKROKONTROLLER ATMEGA 32.” Terdapat di
:
http://fmpunya.blogspot.com/2012/06/dasar-teori-mikrokontroller-atmega-32.html#chitika_close_button, diakses tanggal 15 Januari 2014.
____(2012). “Pengertian Dan Kelebihan Mikrokontroler.” Terdapat di :
http://elektronika-dasar.web.id/artikel-elektronika/pengertian-dan-kelebihan-mikrokontroler/. diakses tanggal 15 Januari 2014.
____(2009). “OPTOCOUPLER.” Terdapat di :
http://jaenal91.wordpress.com/2009/04/03/optocoupler/, diakses tanggal 23
Januari 2014.
Nizam, Shahrul (2010). “PIC Lesson: PWM Module.” Terdapat di :
http://shahrulnizam.com/pic-lesson-pwm-module/, diakses tanggal 10 Februari
2014.
____(2011). “MENGAKSES MOTOR SERVO.” Terdapat di :
http://electrocontrol.wordpress.com/tag/motor-servo/, diakses tanggal 10 Februari
2014.
____(2012). “HC-SR04 Ultrasonic Sensor Distance Measuring Module
Ultra01+.” Terdapat di
:http://www.elecfreaks.com/store/hcsr04-ultrasonic-sensor-distance-measuring-module-ultra01-p-91.html, diakses tanggal 20 Februari
2014.
____(2009). “Prinsip Kerja Rangkaian Sensor Ultrasonik.” Terdapat di :
76
Yulias , Zerfani (2011). “Menggunakan Ultrasonic Range Sensor HC-SR04 dan
SDM-IO.” Terdapat di :
v
Puji syukur penulis ucapkan kehadirat Allah SWT atas berkah, rahmat dan
nikmat-Nya yang senantiasa dilimpahkan kepada penulis, sehinggap enulis dapat
menyelesaikan perancangan alat dan penyusunan laporan tugas akhir dengan judul
Sistem Pemandu Kendaraan Untuk Parkir Paralel Secara Otomatis. Shalawat
serta salam senantiasa tercurah kepada junjungan kita, Nabi Muhammad SAW
beserta pengikut setianya hingga akhir zaman.
Penulisan laporan tugas akhir disusun untuk memenuhi persyaratan
mencapai derajat S-1 Program Studi Teknik Elektro, Fakultas Teknik dan Ilmu
Komputer, Universitas Komputer Indonesia, Bandung.
Penulisan laporan tugas akhir ini tidak lepas dari bantuan dan dukungan
berbagai pihak, baik secara langsung maupun tidak langsung. Oleh karena itu,
dengan segala kerendahan hati, penulis ingin mengucapkan terima kasih dan
penghargaan setinggi-tingginya kepada :
1. Kepada Tuhan yang Maha Esa, karena atas berkat rahmat-Nya penulis
dapat menyelesaikan laporan tugas akhir ini,
2. Mama, Papa, Nenek, Abang Dani Kurnia, Kakak Kiki Sri Marhalinda dan
seluruh keluarga penulis atas kasih sayang, do’a dan motivasinya yang
senantiasa diberikan kepada penulis, sehingga penulis dapat
vi
4. Bapak Prof. Dr. H. Denny Kurniadie, Ir., M.Sc selaku Dekan Fakultas
Teknik dan Ilmu Komputer, Universitas Komputer Indonesia,
5. Bapak Muhammad Aria, MT selaku Ketua Program Studi Teknik Elektro,
Universitas Komputer Indonesia Bandung dan sekaligus selaku
Pembimbing yang telah memberikan banyak masukan, saran serta ide-ide
kreatif pada penulisan tugas akhir ini,
6. Ibu Tri Rahajoeningroem, MT selaku Koordinator tugas akhir Program
Studi Teknik Elektro Universitas Komputer Indonesia Bandung,
7. Bapak dan Ibu Dosen pada Program Studi Teknik Elektro Universitas
Komputer Indonesia Bandung atas didikan dan saran kepada penulis dalam
menyelesaikan tugas akhir ini,
8. Novelaine Pratiska, atas do’a, kasih sayang, serta motivasi agar penulis
dapat segera menyelesaikan tugas akhir dan penulisan laporan tugas akhir
ini,
9. Nieko Fernandes, Nanda Suryadinata, Aldi Asrul Putra, Willy Rullino,
atas masukan serta motivasi yang diberikan kepada penulis dalam
menyelesaikan tugas akhir ini,
10.Pak Budi, Veri Wardi, Harry Putra, Domes Ferdiwan, Vian Yuliana, Yolin
Ultisia, Anisa Muslim dan Apriyanti Dyas, atas waktu, pertolongan
masukan, inspirasi dan motivasi yang diberikan kepada penulis dalam
vii
serta berbagai bantuan dan semangat yang senantiasa diberikan kepada
penulis sehingga penulis dapat menyelesaikan tugas akhir dan penulisan
laporan tugas akhir ini, serta
12.Berbagai pihak yang tidak dapat penulis sebutkan satu persatu yang telah
memberikan bantuan baik materi maupun moril sehingga penulis dapat
menyelesaikan tugas akhir dan penulisan laporan tugas akhir ini.
Penulis menyadari dalam penulisan laporan tugas akhir ini, masih terdapat
berbagai kekurangan dan kelemahan. Oleh karena itu, saran dan kritik sangat
diharapkan oleh penulis untuk lebih menyempurnakan dan melengkapi penulisan
laporan tugas akhir ini.
Bandung, Agustus 2014
1 1.1 Latar Belakang
Seiring dengan berkembangnya kemajuan pada bidang ilmu pengetahuan
dan teknologi banyak inovasi yang diciptakan dalam membantu serta
mempermudah pekerjaan manusia. Dimana setiap pekerjaan yang dilakukan
mempunyai resiko dan bahaya masing-masing. Salah satunya dalam proses
memarkir kendaraan roda empat, dibutuhkan konsentrasi serta kemampuan
mengemudi yang baik agar dapat mencapai posisi parkir yang diinginkan.
Banyaknya produksi dan pengguna mobil saat ini menjadikan sarana
parkir yang tersedia tidak memadai. Salah satu cara atau metoda parkir kendaraan
roda empat adalah parkir secara paralel yaitu, metoda parkir dengan posisi
kendaraan dalam satu garis (sejajar) dengan kendaraan lain. Kemampuan
melakukan manuver parkir secara paralel ini merupakan salah satu bagian tersulit
bagi pengemudi, terutama bagi lansia dan mereka yang baru dalam belajar
mengemudi. Lahan parkir yang sempit, batasan pergerakan mobil, serta jarak
antara mobil menyulitkan pengemudi untuk melakukan proses parkir ini.
Kesulitan tersebut mengakibatkan kerusakan berupa goresan-goresan pada mobil.
Kesulitan-kesulitan tersebut menjadi salah satu alasan menjadikan proses
parkir secara paralel ini dilakukan secara otomatis, guna mengurangi resiko serta
tekanan bagi pengemudi. Berdasarkan dari permasalahan yang dikemukakan di
1.2 Identifikasi Masalah
Berdasarkan latar belakang yang telah dikemukakan, maka identifikasi
permasalahan dalam tugas akhir ini yaitu, membangun suatu sistem yang
dapat melakukan proses parkir paralel dilakukan secara otomatis untuk
mengurangi resiko serta tekanan bagi pengemudi dalam melakukan proses
parkir,
1.3 Rumusan Masalah
Berdasarkan identifikasi masalah di atas, maka rumusan masalah pada
tugas akhir ini yaitu, bagaimana membuat suatu sistem yang dapat melakukan
proses parkir paralel dengan otomatis.
1.4 Tujuan
Tujuan dari tugas akhir ini yaitu, membangun suatu sistem yang dapat
memandu kendaraan untuk melakukan proses parkir paralel secara
otomatis.
1.5 Batasan Masalah
Untuk menghindari pembahasan yang meluas dalam tugas akhir ini, maka
pembahasan dibatasi dalam beberapa hal, diantaranya:
implementasi dilakukan pada mobil Remote Control,
menggunakan metoda Logika Fuzzy,
sistem parkir otomatis ini hanya secara paralel saja,
adanya space atau ruang parkir di antara mobil yang telah terparkir
sebelumnya, atau sudah adanya mobil yang terparkir secara paralel di
depan dan belakang di ruang parkir,
posisi prototype harus sejajar dengan mobil yang telah terparkir
sebelumnya,
tidak adanya mobil atau benda yang berada di depan dan di belakang
mobil saat proses parkir dilakukan.
1.6 Metoda Penelitian
Metoda yang digunakan dalam penulisan tugas akhir ini terdiri dari
beberapa tahapan, diantaranya:
melakukan studi literatur dengan mengumpulkan dan mempelajari
bahan pustaka yang berhubungan dengan permasalahan baik dari buku
maupun dari internet,
pegumpulan informasi yang berhubungan dengan penelitian yang akan
dilakukan. Pengumpulan informasi dilakukan dengan diskusi dengan
pembimbing tugas akhir serta pihak lain yang berkompeten mengenai
hal-hal yang dipelajari selama pengerjaan tugas akhir,
merancang sistem dengan mengaplikasikan literatur serta data
informasi yang didapatkan untuk merancang hardware serta software
yang digunakan dalam sistem ini,
membuat sistem parkir otomatis secara paralel dari rancangan yang
telah disusun sebelumnya,
analisa sistem, apakah sudah sesuai dengan sistem yang telah
direncanakan atau tidak. Analisa dilakukan baik secara teoritis
maupun praktek terhadap sistem, baik hardware maupun software.
Jika terdapat kesalahan atau kekurangan maka dapat melakukan
perbaikan dari sistem.
1.7 Sistematika Penulisan
Sistematika penulisan tugas akhir ini terdiri dari 6 bab dan beberapa sub
bab yaitu:
BAB I PENDAHULUAN
Meliputi latar belakang, tujuan, batasan masalah, metoda penelitian, dan
sistematikan penulisan.
BAB II LANDASAN TEORI
Berisi tentang teori Logika Fuzzy secara umum dan beberpa teori lain yang
digunakan dalam pembuatan tugas akhir ini.
BAB III PERANCANGAN ALAT
Menjelaskan tentang perancangan perangkat keras (hardware) dan
perangkat lunak (software) yang akan dibuat.
BAB IV PENGUJIAN DAN ANALISIS
Berisi tentang pengujian kerja alat, baik hardware maupun software.
BAB V PENUTUP
Berisi kesimpulan dari alat dan sistem yang dibuat, serta saran-saran agar
5 BAB II
LANDASAN TEORI
2.1 Logika Fuzzy
Logika Fuzzy pertama kali diperkenalakan oleh Prof. Lutfi Zadeh pada
tahun 1965. Logika Fuzzy adalah “Suatu sistem yang digunakan untuk menangani
konsep kebenaran parsial yaitu kebenaran yang berada diantara sepenuhnya benar
dan sepenuhnya salah” (Yan, Jun. 1994;14). Logika Fuzzy berbeda dengan logika
digital biasa, dimana logika digital biasanya hanya mengenal dua keadaan yaitu
“ya”-“tidak” atau “on”-“off” atau “high”-“low” atau “1”-“0”. Logika Fuzzy
menggantikan logika Boolean dalam tingkat kebenaran.
Logika Fuzzy telah banyak digunakan pada bidang-bidang seperti statistik,
teori pengendalian, dan lain sebagainya. Logika Fuzzy merupakan suatu metoda
untuk memindahkan atau meniru pengetahuan manusia ke dalam mesin. Logika
Fuzzy yang memiliki nilai kekaburan atau kesamaran (Fuzzyness) antara benar
atau salah. Dalam teori logika Fuzzy suatu nilai bisa bernilai benar atau salah
secara bersamaan. Nilai kebenaran dan kesalahan tergantung pada bobot
keanggotaan atau derajat keanggotaan (Membership Function) dalam rentang 0
hingga 1. Berbeda dengan logika digital yang hanya memiliki dua nilai 1 atau 0.
Logika Fuzzy digunakan untuk menterjemahkan suatu besaran yang diekspresikan
menggunakan bahasa (linguistic), misalkan besaran kecepatan laju kendaraan
yang diekspresikan dengan pelan, agak cepat, cepat, dan sangat cepat. Logika
nilai itu salah. Derajat keanggotaan 0 (nol) artinya nilai bukan merupakan anggota
himpunan dan 1 (satu) berarti nilai tersebut adalah anggota himpunan.
Logika Fuzzy adalah suatu cara yang tepat untuk memetakan suatu ruang
input ke dalam suatu ruang output, mempunyai nilai kontinyu. Fuzzy dinyatakan
dalam derajat dari suatu keanggotaan dan derajat dari kebenaran. Oleh sebab itu
sesuatu dapat dikatakan sebagian benar dan sebagian salah pada waktu yang sama
(Kusumadewi. 2004)
Logika Fuzzy memungkinkan nilai keanggotaan antara 0 dan 1, tingkat
keabuan dan juga hitam dan putih, dan dalam bentuk linguistik, konsep tidak pasti
seperti "sedikit", "lumayan" dan "sangat" (Zadeh 1965).
2.1.1 Himpunan Fuzzy
Himpunan adalah suatu kumpulan atau koleksi objek-objek yang
mempunyai kesamaan sifat tertentu (Frans Susilo, 2006). Himpunan Fuzzy
merupakan suatu pengembangan lebih lanjut tentang konsep himpunan dalam
matematika.
Himpunan Fuzzy adalah rentang nilai-nilai, masing-masing nilai
mempunyai derajat keanggotaan antara 0 sampai dengan 1. Himpunan Fuzzy
memiliki 2 atribut, yaitu:
a. Linguistik, yaitu penamaan suatu grup yang mewakili suatu keadaan atau
kondisi tertentu dengan menggunakan bahasa alami, seperti muda,
parobaya, tua.
b. Numerik, suatu nilai (angka) yang menunjukkan ukuran dari suaru
Beberapa hal yang perlu diketahui dalam memahami Fuzzy, yaitu:
a. Variable Fuzzy, merupakan variabel yang hendak dibahas dalam suatu
sistem Fuzzy. Contoh: umur, temperature, permintaan, dan lain
sebagainya.
b. Semesta pembicaraan, merupakan keseluruhan nilai yang diperbolehkan
untuk dioperasikan dalam suatu variabel Fuzzy. Semesta pembicaraan
merupakan himpunan bilangan real yang senantiasa naik (bertambah)
secara monoton dari kiri ke kanan. Nilai semesta pembicaraan dapat
berupa bilangan positif maupun negatif.
c. Domain himpunan Fuzzy, merupakan keseluruhan nilai yang diijinkan
dalam semesta pembicaraan dan boleh dioperasikan dalam suatu himpunan
Fuzzy. Seperti halnya semesta pembicaraan, domain merupakan himpunan
bilangan real yang senantiasa naik (bertambah) secara monoton dari kiri
ke kanan. Nilai domain dapat berupa bilangan positif dan bilangan negatif.
2.1.2 Fungsi Keanggotaan (Membership Function)
Fungsi keanggotaan adalah suatu kurva yang menunjukkan pemetaan
titik-titik input data kedalam nilai keanggotaannya (sering juga disebut dengan derajat
keanggotaan) yang memiliki interval antara 0 sampai 1. Salah satu cara yang
dapat digunakan untuk mendapatkan nilai keanggotaan adalah dengan melalui
pendekatan fungsi. Apabila U menyatakan himpunan universal dan A adalah
himpunan fungsi Fuzzy dalam U, maka A dapat dinyatakan sebagai pasangan
terurut (Wang, 1997 dari Wulandari, F., 2005). Ada 2 fungsi yang digunakan
a. Representasi Kurva Segitiga
Kurva segitiga pada dasarnya merupakan gabungan antara 2 garis linear.
Gambar 2.1 Representasi Kurva Segitiga Representasi kurva segitiga adalah sebagai berikut:
.…...………….…(2.1)
Atau
…...…...…….…(2.2)
Dimana:
a = nilai domain terkecil yang mempunyai derajat keanggotaan nol
b = nilai domain yang mempunyai derajat keanggotaan satu
c = nilai domain terbesar yang mempunyai derajat keanggotaan nol
x = nilai input yang akan diubah ke dalam bilangan Fuzzy
b. Representasi Kurva Trapesium
Kurva trapesium pada dasarnya seperti bentuk segitiga, hanya saja ada
Gambar 2.2 Representasi Kurva Trapesium Representasi kurva segitiga adalah sebagai berikut:
………...……..…..(2.3)
Atau
…...……...…(2.4)
Dimana:
a = nilai domain terkecil yang mempunyai derajat keanggotaan nol
b = nilai domain terkecil yang mempunyai derajat keanggotaan satu
c = nilai domain terbesar yang mempunyai derajat keanggotaan satu
d = nilai domain terbesar yang mempunyai derajat keanggotaan nol
x = nilai input yang akan diubah ke dalam bilangan Fuzzy
2.1.3 Operasi Logika Fuzzy
Operasi logika adalah operasi yang mengkombinasikan dan memodifikasi
2 atau lebih himpunan Fuzzy. Nilai keanggotaan baru hasil operasi dua himpunan
disebut firing strength atau α predikat, ada 3 operasi dasar yang diciptakan oleh
a. Operator AND, berhubungan dengan operasi intersection pada himpunan,
α predikat diperoleh dengan mengambil nilai minimum antar kedua
himpunan.
……….……..….(2.5)
b. Operator OR, berhubungan dengan operasi union pada himpunan, α
predikat diperoleh dengan mengambil nilai maximum antar kedua
himpunan.
………..….(2.6)
c. Operasi NOT, berhubungan dengan operasi komplemen pada himpunan,
α predikat diperoleh dengan mengurangkan nilai keanggotaan elemen pada
himpunan dari 1.
………...………...….(2.7)
2.1.4 Tahapan Membangun Sistem Fuzzy
Tahapan membangun sistem Fuzzy tergantung metoda yang digunakan,
karena banyak metoda untuk membangun sistem Fuzzy. Namun secara garis besar
dapat disimpulkan sebagai berikut :
input output
Gambar 2.3 Proses Sistem Logika Fuzzy a. Fuzzification
Proses Fuzzification yaitu mengubah nilai suatu masukan menjadi suatu
fungsi keanggotaan Fuzzy. Pada proses ini Membership Function
ditentukan.
Fuzzification Fuzzy Logic
Inference
b. Fuzzy Logic Inference
Ada beberapa proses pada Fuzzy Logic Inference, yaitu :
Mengaplikasikan aturan (Fuzzy Rule) pada masukan Fuzzy yang
dihasilkan dalam proses Fuzzification.
Mengevaluasi tiap aturan dengan masukan yang dihasilkan dari proses
Fuzzyfikasi dengan mengevaluasi hubungan atau derajat
keanggotaannya.
c. Defuzzification
Proses Defuzzification merupakan pengubahan kembali data-data Fuzzy
kembali kebentuk numeric yang dapat dikirimkan ke peralatan
pengendalian. Proses Defuzzification dapat dilakukan dengan beberapa
cara, diantaranya:
Sistem Inferensi Fuzzy (Fuzzy Inference System/FIS) disebut juga Fuzzy
Inference Engine adalah sistem yang dapat melakukan penalaran dengan prinsip
serupa seperti manusia melakukan penalaran dengan nalurinya. Terdapat beberapa
a. FIS Mamdani
FIS yang paling mudah dimengerti, karena paling sesuai dengan naluri
manusia adalah FIS Mamdani. FIS tersebut bekerja berdasarkan
kaidah-kaidah linguistik dan memiliki algoritma Fuzzy yang menyediakan sebuah
aproksimasi untuk dimasuki analisa matematik.
Gambar 2.4 FIS Mamdani b. FIS Sugeno
Penalaran dengan metode Sugeno hampir sama dengan penalaran
Mamdani, hanya saja output sistem tidak berupa himpunan Fuzzy
melainkan berupa konstanta atau persamaan linier. Metoda ini
diperkenalkan oleh Takagi-Sugeno Kang pada tahun 1985. Sistem Fuzzy
Sugeno memperbaiki kelemahan yang dimiliki oleh sistem Fuzzy murni
untuk menambah suatu perhitungan matematika sederhana sebagai bagian
THEN. Pada perubahan ini, sistem Fuzzy memiliki suatu nilai rata-rata
tertimbang (Weighted Average Values) di dalam bagian aturan Fuzzy
bagian THEN, yaitu dengan adanya perhitungan matematika sehingga
tidak dapat menyediakan kerangka alami untuk erepresentasikan
pengetahuan manusia dengan sebenarnya.
Gambar 2.5 FIS Sugeno
2.2 Sensor Jarak Ultrasonik (SR-04)
Sensor ultrasonik SR-04 adalah sebuah sensor jarak yang terdiri dari
rangkaian pemancar ultrasonik atau transmitter dan rangkaian penerima ultrasonik
atau receiver. Gelombang ultrasonik adalah gelombang dengan besar frekuensi
diatas frekuensi gelombang suara yaitu 40khz.
Prinsip kerja dari sensor SR-04 adalah sebagai berikut :
Gelombang ultrasonik akan dibangkitkan dan dipancarkan melalui
transmitter secara menyebar.
Gelombang ultrasonik yang dipancarkan tersebut kemudian akan
merambat sebagai sinyal / gelombang bunyi dengan kecepatan bunyi yang
berkisar 340 m/s. Sinyal tersebut kemudian akan dipantulkan dan akan
diterima kembali oleh bagian receiver ultrasonik.
Setelah sinyal tersebut diterima kembali, kemudian sinyal tersebut akan
diproses untuk menghitung jaraknya. Jarak dihitung berdasarkan rumus :
S = 340.t/2...(2.11)
dimana S adalah jarak antara sensor ultrasonik dengan bidang pantul, dan t
adalah selisih waktu antara pemancaran gelombang ultrasonik sampai
diterima kembali oleh bagian penerima ultrasonik.
Gambar 2.7 Cara Kerja Sensor Ultrasonik
Jadi secara ringkas cara kerja dari sensor ultrasonik ini yaitu memancarkan
gelombang ultrasonik oleh transmitter yang bersifat menyebar dan akan memantul
jika terkena halangan atau benda yang berada di depannya, pantulan tersebut akan
2.3 Optocoupler
Optocoupler adalah suatu piranti elektronika yang terdiri dari 2 bagian
yaitu transmitter (pengirim) dan receiver (penerima), yaitu antara bagian yang
menghasilkan cahaya dengan bagian deteksi sumber cahaya tersebut terpisah.
a. Transmitter
Merupakan bagian yang terhubung dengan rangkaian input atau rangkaian
kontrol. Pada bagian ini terdapat sebuah LED infra merah (IR LED) yang
berfungsi untuk mengirimkan sinyal kepada receiver. Pada transmitter
dibangun dari sebuah LED infra merah. Jika dibandingkan dengan
menggunakan LED biasa, LED infra merah memiliki ketahanan yang lebih
baik terhadap sinyal tampak. Cahaya yang dipancarkan oleh LED infra
merah tidak terlihat oleh mata telanjang.
b. Receiver
Merupakan bagian yg terhubung dengan rangkaian output atau rangkaian
beban, dan berisi komponen penerima cahaya yang dipancarkan oleh
transmitter. Komponen penerima cahaya ini dapat berupa photodioda
atapun phototransistor. Pada bagian receiver dibangun dengan dasar
komponen phototransistor. Phototransistor merupakan suatu transistor
yang peka terhadap tenaga cahaya. Suatu sumber cahaya menghasilkan
energi panas, begitu pula dengan spektrum infra merah. Karena spekrum
infra mempunyai efek panas yang lebih besar dari cahaya tampak, maka
Gambar 2.8 Optocoupler
Optocoupler merupakan gabungan dari LED infra merah dengan
photo-transistor yang terbungkus menjadi satu chips. LED infra merah sebagai
transmitter akan menghasilakan cahaya infra merah termasuk dalam gelombang
elektromagnetik yang tidak tampak oleh mata telanjang. Sinar ini tidak tampak
oleh mata karena mempunyai panjang gelombang berkas cahaya yang terlalu
panjang bagi tanggapan mata manusia. Sinar infra merah mempunyai daerah
frekuensi 1 x 1012 Hz sampai dengan 1 x 1014 GHz atau daerah frekuensi dengan
panjang gelombang 1µm – 1mm. Cahaya infra merah ini akan diterima oleh
phototransistor. Photo-transistor merupakan komponen elektronika yang
berfungsi sebagai detektor cahaya infra merah. Detektor cahaya ini mengubah
efek cahaya menjadi sinyal listrik, oleh sebab itu photo-transistor termasuk dalam
Gambar 2.9 Cara Kerja Optocoupler Prinsip kerja dari optocoupler adalah sebagai berikut:
Jika antara photo-transistor dan LED terhalang maka photo-transistor
tersebut akan off sehingga output dari kolektor akan berlogika high.
Sebaliknya jika antara photo-transistor dan LED tidak terhalang maka
phototransistor dan LED tidak terhalang maka photo-transistor tersebut
akan on sehingga output-nya akan berlogika low.
2.4 Pulse Width Modulation (PWM)
PWM merupakan suatu metoda untuk membangkitkan sinyal keluaran
berupa pulsa dengan frekuensi dan amplitudo tetap dengan lebar pulsa yang dapat
diubah-ubah. Lebar pulsa berupa berupa kondisi high dan low dapat diatur
durasinya sesuai dengan keinginan. PWM bisa dibangkitkan secara software
maupun hardware. Sehingga dapat dibentuk gelombang dengan duty cycle yang
Gambar 2.10 Sinyal PWM
Duty cycle merupakan perbandingan atau rasio lamanya suatu sistem
bernilai logika high dan low. Variasi duty cycle ini memberikan harga tegangan
rata–rata yang berbeda–beda. Sinyal PWM dengan duty cycle yang besar memiliki
nilai rata-rata tegangan yang lebih besar dibandingkan dengan duty cycle kecil.
Nilai tegangan yang diberikan sebanding dengan nilai duty cycle yang diberikan.
Adapun rumus duty cycle, yaitu:
...(2.12)
Sedangkan untuk menghitung nilai tegangan rata-rata output dapat dihitung
dengan rumus sebagai berikut:
...(2.13)
Dimana Vtotal merupakan tegangan yang diberikan untuk mengaktifkan motor.
2.4.1 PWM Sebagai Pengatur Kecepatan Motor DC
Motor DC adalah piranti elektronik yang mengubah energi listrik menjadi
energi mekanik berupa gerak rotasi. Kecepatan motor DC berbanding lurus
dengan tegangan listrik yang diberikan. Sebagai contoh, jika tegangan motor
dikurangi dari 6 volt menjadi 3 volt, maka kecepatan motor akan turun menjadi
setengahnya. Salah satu cara untuk menurunkan kecepatan motor yaitu dengan
menghubungkan kembali supply tegangan listrik dengan sangat cepat. Cara kerja
inilah yang diadopsi oleh PWM. Saat tegangan listrik terputus putaran motor akan
melambat, dan dipercepat kembali ketika tegangan listrik tersambung.
Gambar 2.11 Motor DC
Cepat lambatnya motor DC dapat diatur berdasarkan duty cycle yang
diberikan, jika duty cycle pada sinyal PWM besar, maka akan menghasilakan
rata-rata tegangan yang besar pula sehingga motor DC akan berputar cepat, begitu juga
sebaliknya jika duty cycle yang diberikan kecil akan mengahasilkan tegangan
rata-rata yang kecil dan motor DC akan berputar lebih lambat. Pengaturan nilai
tegangan rata-rata tersebut dapat diatur dengan menggunakan persamaan (2.13).
2.4.2 PWM Sebagai Pengatur Sudut Motor Servo
Motor servo adalah sebuah motor DC yang dilengkapi rangkaian kendali
dengan sistem closed feedback yang terintegrasi dalam motor tersebut. Motor
servo disusun dari sebuah motor DC, gearbox, variabel resistor (VR) atau
potensiometer dan rangkaian kontrol. Potensiometer berfungsi untuk menentukan
batas maksimum putaran sumbu (axis) motor servo. Sedangkan sudut dari sumbu
motor servo diatur berdasarkan lebar pulsa yang pada pin kontrol motor servo.
Pemberian pulsa sebagai pengontrolan motor servo dapat dilakukan dengan
Berbeda dengan motor DC, lebar pulsa yang diberikan pada motor servo
ini diberikan untuk mengatur posisi sudut motor. Motor servo akan bekerja secara
baik jika pada bagian pin kontrolnya diberikan sinyal PWM dengan frekuensi 50
Hz. Servo motor mempunyai 3 buah pin yang terdiri dari VCC, GND dan pin
SIGNAL. Berikut adalah contoh konfigurasi pin motor servo :
Gambar 2.12 Motor Servo Motor servo ini terbagi menjadi 2 jenis, yaitu :
a. Motor servo standard
Motor servo jenis ini hanya mampu bergerak dua arah (CW dan CCW)
dengan defleksi masing-masing sudut mencapai 90° sehingga total defleksi
sudut dari kanan – tengah – kiri adalah 180°.
b. Motor servo continius
Motor servo jenis ini mampu bergerak dua arah (CW dan CCW) tanpa
batasan defleksi sudut putar (dapat berputar secara kontinyu).
Dari kedua jenis motor servo tersebut, metoda PWM dapat digunakan untuk
menentukan posisi sudut motor, hanya saja terdapat perbedaan pada besarnya arah
puataran motor.
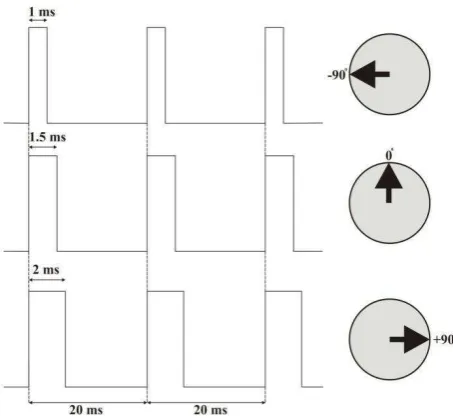
Pada motor servo standard hanya dapat bergerak sebesar 180° yaitu dari
adalah dengan cara memberikan pulsa high selama 1,5 ms dan mengulangnya
setiap 20 ms, maka posisi servo akan berada ditengah atau netral (0°). Untuk pulsa
1 ms maka akan bergerak berkebalikan arah jarum jam dengan sudut -90°. Dan
pulsa high selama 2 ms akan bergerak searah jarum jam sebesar 90° seperti
terlihat pada gambar berikut:
Gambar 2.13 Sinyal Kontrol Motor Servo
Pengaturan pergerakan motor servo continius tidak jauh berbeda dengan
pengaturan pengendalian motor servo standard, secara umum untuk berputar
(rotasi) searah jarum jam harus diberi pulsa high selama 1,3 ms. Sedangkan untuk
berputar berlawanan arah jarum jam harus diberi logika high selama 1,7 ms. Jika
motor servo continous diberi pulsa high selama 1,5 ms maka akan berhenti. Pin
signal pada motor servo dapat dikoneksi ke pin mikrokontroler sebagai pengendali
2.5 Mikrokontroler
Mikrokontroler adalah sebuah chip yang berfungsi sebagai pengontrol
rangkaian elektronik dan umunya dapat menyimpan program didalamnya.
Mikrokontroler umumnya terdiri dari CPU (Central Processing Unit), memori,
I/O tertentu dan unit pendukung seperti Analog-to-Digital Converter (ADC) yang
sudah terintegrasi di dalamnya.
Gambar 2.14 ATmega 32
Kelebihan utama dari mikrokontroler ialah tersedianya RAM dan peralatan
I/O pendukung sehingga ukuran board mikrokontroler menjadi sangat ringkas.
AVR Atmega32 merupakan sebuah mikrokontroler low power CMOS 8 bit
berdasarkan arsitektur AVR RISC. Karakteristik dari mikrokontroler ini adalah:
Menggunakan arsitektur AVR RISC
- 131 perintah dengan satu clock cycle
- 32 x 8 register umum
Data dan program memori
- 32 Kb In-System Programmable Flash
- 2 Kb SRAM
8 Channel 10-bit ADC
Two Wire Interface
USART Serial Communication
Master/Slave SPI Serial Interface
On-Chip Oscillator
Watch-dog Timer
32 Bi-directional I/O
Tegangan operasi 2,7 – 5,5 V
Arsitektur AVR ini menggabungkan perintah secara efektif dengan 32
register umum. Semua register tersebut langsung terhubung dengan Arithmetic
Logic Unit (ALU) yang memungkinkan 2 register terpisah diproses dengan satu
perintah tunggal dalam satu clock cycle. Hal ini menghasilkan kode yang efektif
dan kecepatan prosesnya 10 kali lebih cepat dari pada mikrokontroler CISC biasa.
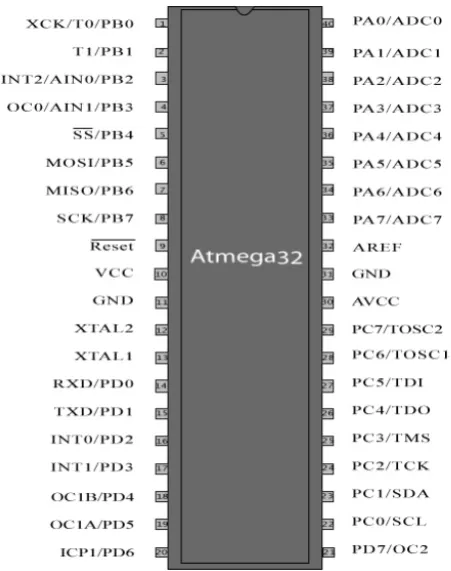
AVR ATMega32 terdiri dari 40 pin yang terbagi menjadi 4 port yaitu
PORTA sebanyak 8 pin, PORTB sebanyak 8 pin, PORTC sebanyak 8 pin, dan
PORTC sebanyak 8 pin. Masing-masing pin dapat digunakan sebagai input-output
Gambar 2.15 Pin-Pin ATMega32
Secara fungsional konfigurasi pin ATMega32 adalah sebagai berikut:
a. VCC, tegangan sumber
b. GND (Ground)
c. Port A (PA7 – PA0)
Port A adalah 8-bit port I/O yang bersifat bi-directional dan setiap pin
memilki internal pull-up resistor. Output buffer port A dapat mengalirkan
arus sebesar 20 mA. Ketika port A digunakan sebagai input dan di pull-up
secara langsung, maka port A akan mengeluarkan arus jika internal pull-up
resistor diaktifkan. Pin-pin dari port A memiliki fungsi khusus yaitu dapat
berfungsi sebagai channel ADC (Analog to Digital Converter) sebesar 10
bit. Fungsi-fungsi khusus pin-pin port A dapat ditabelkan seperti yang
Tabel 2.1 Fungsi Khusus Port A
mengandung internal pull-up resistor. Output buffer port B dapat
mengalirkan arus sebesar 20 mA. Ketika port B digunakan sebagai input
dan di pull-down secara external, port B akan mengalirkan arus jika
internal pull-up resistor diaktifkan. Fungsi-fungsi khusus pin-pin port B
dapat ditabelkan seperti pada tabel.
Tabel 2.2 Fungsi Khusus Port B
Port Fungsi
PB7 SCK (SPI Bus Serial Clock)
PB6 MISO (SPI Bus Master Input/Slave Output) PB5 MOSI (SPI Bus Master Output/Slave Input) PB4 SS (SPI Slave Select Input)
PB3 AIN1 (Analog Comparator Negative Input)
OCO (Timer/Counter0 Output Compare Match
Output)
PB2 AIN0 (Analog Comparator Positive Input) INT2 (External Interrupt 2 Input)
PB1 T1 (Timer/Counter1 External Counter Input) PB0 T0 (Timer/Counter External Counter Input)
e. Port C (PC7 – PC0)
Port C adalah 8-bit port I/O yang berfungsi bi-directional dan setiap pin
memiliki internal pull-up resistor. Output buffer port C dapat mengalirkan
arus sebesar 20 mA. Ketika port C digunakan sebagai input dan di
pull-down secara langsung, maka port C akan mengeluarkan arus jika internal
pull-up resistor diaktifkan. Fungsi-fungsi khusus pin-pin port C dapat
ditabelkan seperti yang tertera pada tabel dibawah ini.
Tabel 2.3 Fungsi Khusus Port C
Port Fungsi
PC7 TOSC2 (Timer Oscillator Pin 2) PC6 TOSC1 (Timer Oscillator Pin 1) PC5 TD1 (JTAG Test Data In) PC4 TD0 (JTAG Test Data Out) PC3 TMS (JTAG Test Mode Select) PC2 TCK (JTAG Test Clock)
PC1 SDA (Two-wire Serial Bus Data Input/Output Line) PC0 SCL (Two-wire Serial Bus Clock Line)
f. Port D (PD7 – PD0)
Port D adalah 8-bit port I/O yang berfungsi bi-directional dan setiap pin
memiliki internal pull-up resistor. Output buffer port D dapat mengalirkan
arus sebesar 20 mA. Ketika port D digunakan sebagai input dan di
pull-down secara langsung, maka port D akan mengeluarkan arus jika internal
pull-up resistor diaktifkan. Fungsi-fungsi khusus pin-pin port D dapat
Tabel 2.4 Fungsi Khusus Port D
Port Fungsi
PD7 OC2 (Timer / Counter2 Output Compare Match
Output)
PD6 ICP1 (Timer/Counter1 Input Capture Pin)
PD5 OCIB (Timer/Counter1 Output Compare B Match) PD4 TD0 (JTAG Test Data Out)
28
Perancangan yang baik dan dilakukan secara sistematik akan memberikan
kemudahan dalam proses pembuatan alat serta dapat mempermudah dalam proses
analisis dari alat yang dibuat. Pada bab ini akan dijelaskan tentang perancangan
sistem baik hardware maupaun software beserta alasan pemilihan komponen yang
digunakan.
3.1 Perancangan Sistem
Pada perancangan sistem pemandu kendaraan untuk parkir paralel secara
otomatis ini, secara umum terdiri dari tiga bagian utama, yaitu masukan (input),
proses dan keluaran (output). Ketiga proses tersebut akan bekerja jika tombol
untuk parkir otomatis ditekan. Setiap bagian dari sistem mempunyai fungsi
masing-masing yang akan saling berkaitan dalam sistem pemandu parkir otomatis
ini.
Secara umum cara kerja dari sistem pemandu kendaraan untuk parkir
paralel secara otomatis ini adalah pertama-tama mendeteksi ruang parkir yang
tersedia. Proses deteksi ini menggukan sensor ultrasonik dan optocoupler untuk
menghitung putaran roda kendaraan dengan luas ruang parkir yang tersedia. Jika
ruang (space) parkir yang tersedia sesuai dengan ukuran mobil, maka proses
parkir akan dijalankan secara otomatis dengan menghitung jarak-jarak antara
benda yang ada di sekitar mobil.
Pada blok diagram terdapat tiga bagian utama dari sistem, yaitu pertama
masukan berupa data jarak dari sensor ultrasonik dan counter dari optocoupler,
kedua proses berupa mikrokontroler yang akan memproses data masukan
menggunakan logika Fuzzy, dan ketiga adalah keluaran berupa putaran motor DC
maju atau mundur dan perubahan sudut motor servo (steering).
3.1.1 Bagian Masukan (input)
Masukan (input) dari sistem ini terdiri dari 2 yaitu optocoupler dan sensor
ultrasonik.
a. Optocoupler
Optocoupler hanya digunakan untuk menghitung panjang ruang parkir
yang akan digunakan sebagai tempat parkir nantinya. Optocoupler akan
bekerja jika sensor ultrasonik mendeteksi adanya ruang (space) sewaktu
mobil berjalan. Optocoupler akan terus bekerja hingga ruang parkir yang
terdeteksi bisa digunakan sebagai ruang parkir.
b. Sensor ultrasonik
Selain untuk mendeteksi ruang parkir yang menghubungkan sistem dengan
penting dalam melakukan proses parkir ini. Selama proses parkir
berlangsung, sensor ultrasonik akan mendeteksi jarak mobil dengan benda
yang berada di depan, di samping maupun di belakang mobil. Masukan
dari ultrasonik ini yang nantinya akan diproses dengan menggunakan
logika Fuzzy pada mikrokontroler. Keputusan-keputusan output berupa
arah putar motor servo (steering) bergantung pada masukan sensor
ultrasonik ini.
3.1.2 Bagian Process
Mikrokontroler AVR ATmega 32 digunakan sebagai perangkat utama
untuk mengontrol sistem pemandu kendaraan untuk parkir paralel secara otomatis
menggunakan logika Fuzzy ini. Mikrokontroler akan memproses masukan baik
dari sensor ultrasonik maupun dari optocoupler dan memberikan keputusan output
berupa arah putaran motor DC maju atau mundur dan arah putaran motor servo.
3.1.3 Bagian Keluaran (output)
kecepatannya telah diatur. Motor DC dan mikrokontroler dihubungkan
motor DC berupa keputusan mobil untuk maju atau keputusan mobil untuk
mundur.
b. Motor Servo
Motor servo digunakan sebagai steering pada mobil. Input dari sensor
ultrasonik ke mikrokontroler akan menghasilkan output berupa besarnya
sudut motor servo. Perubahan sudutr motor servo akan berganti selama
proses parkir berlangsung.
3.2 Perancangan Perangkat Keras (Hardware)
Dalam perancangan sistem pemandu kendaraan untuk parkir otomatis pada
tugas akhir ini akan dimodelkan pada mobil-mobilan remote control. Model
mobil-mobilan yang dirancang memiliki 4 buah sensor ultrasonik sebagai
pendeteksi jarak, 1 buah optocoupler sebagai penghitung ruang parkir, 1 motor
DC sebagai penggerak mobil, 1 buah motor servo sebagai steering mobil, 1 buah
driver motor, dan 1 buah sistem minumum ATmega 32 sebagai pusat
pengendalian mobil.
Perancangan sistem kontrol yang meliputi pembuatan rangkaian-rangkaian
elektronik yang saling terintegrasi membentuk sistem kendali dengan tujuan
mengendalikan kerja sistem agar dapat bekerja sesuai dengan keinginan.
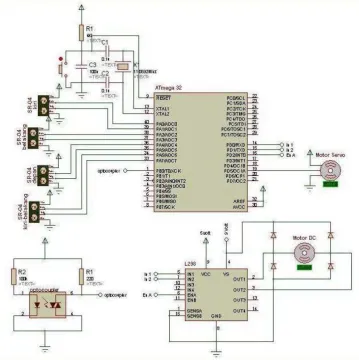
Gambar 3.3 Rangkaian Secara Keseluruhan 3.2.1 Rangkaian Sistem Minimum Mikrokontroler AVR ATmega 32
Sistem minimum ATmega 32 adalah rangkaian yang dikhususkan untuk
mengoperasikan IC ATmega 32. Mikrokontroler inilah yang nantinya akan
digunakan sebagai pusat pengendalian parkir otomatis ini. Pemilihan jenis
mikrokontroler ATmega 32 ini karena berdasarkan perbandingan dengan dengan
diinginkan. Berikut adalah skematik dari rangkaian sistem minimum
mikrokontroler ATmega 32:
Gambar 3.4 Sistem Minimum ATmega 32
Input-an dari sistem yang banyak memerlukan memory flash yang besar
pula, ATmega 32 memiliki memory yang lebih besar dan ATmega 32 memiliki
RAM yang lebih besar sehingga mempengaruhi kecepatan akses data sementara
pada mikrokontroler.
Tabel 3.1 Uraian Perbandingan Jenis Mikrokontroler
Spesifikasi
Pada tabel 3.1 terlihat perbedaan pada masing-masing IC disetiap
spesifikasinya. Dari perbedaan tersebut, IC ATmega 32 lebih cocok digunakan
3.2.2 Rangkaian Sensor Jarak Ultrasonik SR-04
Sensor ultrasonik digunakan untuk mengetahui jarak mobil dengan
benda-benda yang berada disekitar mobil. Terdapat beberapa jenis sensor ultrasonik yang
dapat digunakan namun pada tugas akhir ini, sensor ultrasonik yang digunakan
adalah SR-04. Uraian mengenai perbandingan sensor SR-04 dengan sensor
ultrasonik yang lain dapat dilihat pada tabel 3.2 berikut.
Tabel 3.2 Uraian Perbandingan Jenis Sensor Ultrasonik
Spesifikasi Jenis Sensor
dan harga dari masing-masing sensor. Berdasarkan pertimbangan dari
perbandingan sensor tersebut, sensor SR-04 lebih cocok digunakan dalam
perancangan tugas akhir ini. Dilihat dari jarak, sensor SR-04 dapat mengukur dari
5 cm hingga 500cm dirasa cukup untuk perancangan tugas akhir ini dan dilihat
Gambar 3.5 Sensor Jarak Ultrasonik SR-04
Sensor ultrasonik akan dihubungkan langsung ke mikrokontroler menjadi
input bagi sistem. Sensor ultrasonik yang digunakan pada tugas akhir ini
sebanyak 4 buah yang dipasang pada bagian sisi kiri mobil robot. Setiap sensor
terhubung pada port yang berbeda di mikrokontroler. Masing-masing dari sensor
mempunyai fungsi yang berbeda di dalam sistem ini. Berikut tabel port sensor
ultrasonik yang dihubungkan ke mikrokontroler.
Tabel 3.3 Port Sensor Ultrasonik Pada Mikrokontroler
No Sensor Echo Trigger
1 Sensor Kiri PORTA 0 PORTA 1
2 Sensor Belakang PORTA 2 PORTA 3
3 Sensor Depan PORTA 4 PORTA 5
4 Sensor Kiri-Belakang PORTA 6 PORTA 7
3.2.3 Rangkaian Optocoupler
Pada tugas akhir ini, optocoupler digunakan untuk menghitung panjang
ruang parkir yang digunakan. Optocoupler merupakan rangkaian elektronika yang
terdiri dari LED dan photo-transistor yang akan mengalami perubahan logika bila
terjadi perubahan intensitas cahaya yang dipancarkan oleh pemancar (LED infra
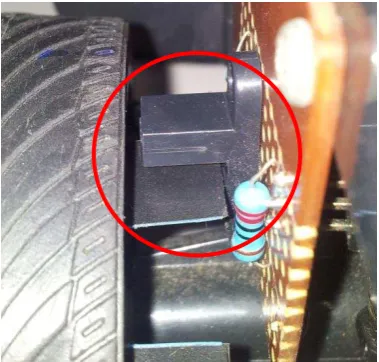
Gambar 3.6 Rangkaian Optocoupler
Roda cacah yang diletakkan di tengah optocoupler berfungsi untuk
mempengaruhi intensitas cahaya yang diberikan oleh IR-LED pada optocoupler
ke photo-transistor yang akan memberikan perubahan level logika sesuai dengan
putaran roda cacah.
Gambar 3.7 Optocoupler dan Roda Pencacah pada Prototype Mobil
Dengan memodifikasi bentuk bagian dalam ban prototype mobil berbentuk roda
pencacah yang berfungsi untuk memberikan logika high dan low pada
mobil sebanyak 7 buah yang berarti sama dengan keliling dari ban itu sendiri
yaitu:
Panjang diameter dari ban prototype mobil = 7cm
Keliling =
dari optocoupler sebanyak 7 kali akan sama dengan mobil bergerak sejauh 22 cm.
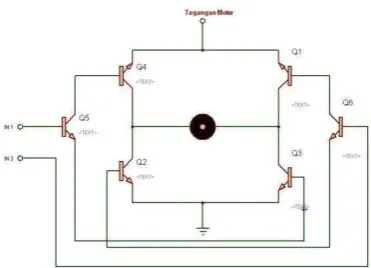
3.2.4 Rangkaian Driver Motor DC (L298)
Rangkaian driver motor DC L298 merupakan integrasi dari rangkaian
H-Bridge transistor. Driver motor DC H-Bridge adalah sistem kontrol motor DC
dengan metode jembatan (bridge). Rangkaian driver motor DC H-Bridge ini dapat
mengendalikan motor DC dalam 2 arah baik secara PWM maupun kontrol dengan
logika HIGH dan LOW. Dengan metode PWM dapat mengendalikan kecepatan
putaran motor DC sedangkan dengan metode logika kontrol HIGH dan LOW
maka motor selalu start dalam kecepatan maksimal. Berikut contoh rangkaian
H-Bridge:
Sedangkan contoh rangkaian H-Bridge yang sudah terintegrasi pada rangkaian
driver motor L298 yang digunakan adalah sebagai berikut:
Gambar 3.9 Rangkaian Driver Motor L298
Pada rangkaian terlihat driver motor L298 dapat mengontrol 2 motor DC, namum
yang dipakai pada tugas akhir ini hanya 1 motor DC.
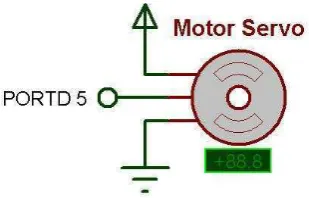
3.2.5 Rangkaian Motor Servo
Motor servo pada tugas akhir ini digunakan sebagai steering yang berarti
merubah posisi mobil robot. Pada tugas akhir ini, digunakan 1 buah motor servo
standard. Motor servo jenis ini hanya mampu bergerak dua arah (CW dan CCW)
dengan defleksi masing-masing sudut mencapai 90° sehingga total defleksi sudut
Gambar 3.10 Motor Servo
Servo analog dan digital memiliki tiga kabel. Satu kabel untuk catu positif,
biasanya DC 5-6 Volt. Kabel kedua untuk ground, dan kabel ketiga merupakan
kabel sinyal. Controller berkomunikasi dengan servo melalui kabel ini, melalui
sinyal berupa pulsa. Pada tugas akhir ini kabel ketiga dihubungkan ke
mikrokontroler seperti gambar berikut.
Gambar 3.11 Rangkaian Motor Servo
3.3 Perancangan Perangkat Lunak (Software)
Perancangan perangkat lunak (software) bertujuan untuk menentukan
setiap alur eksekusi dari perangkat sistem pemandu parkir otomatis yang
(software) yang nantinya akan menentukan keluaran (output) dari sistem. Berikut
alur kerja (flowchart) dari sistem yang dirancang.
Start
3.4 Gambaran Sistem
Sistem pemandu parkir paralel secara otomatis ini terdiri dari 2 proses
yaitu proses mencari ruang (space) parkir dan proses parkir itu sendiri. Pada
proses parkir ini terdiri dari dari 2 tahapan, yaitu proses mobil mundur melakukan
manuver parkir dan proses maju di dalam ruang parkir.
3.4.1 Mobil Maju Mencari Space Parkir
Tahap pertama yaitu mobil akan maju mencari ruang parkir yang sesuai
dengan ukuran mobil. Pada tahap ini, sensor ultrasonik yang akan berkerja hanya
sensor di sebelah kiri-belakang. Ruang (space) parkir yang bisa digunakan yaitu
sesuai dengan ukuran mobil, seperti pada gambar :
Gambar 3.13 Ruang (Space) Parkir
Jika sensor mendeteksi ruang parkir, maka optocoupler akan aktif
menghitung panjang ruang yang akan digunakan. Jika ruang parkir sesuai dengan
ukuran mobil, maka mobil akan berhenti dan siap melakukan proses parkir.
Asumsi ruang parkir yang akan digunakan berukuran panjang ±70 cm dan
lebar ±40 cm seperti terlihat pada gambar 3.13. Prototype mobil akan menghitung
sendiri panjang ruang parkir yang tersedia dengan menggunakan optocoupler.
Seperti yang dijelaskan pada bagian 3.2.3 tentang rangkaian optocoupler,
ke mikrokontroler selama sensor kiri-belakang mendeteksi adanya ruang parkir.
Sensor ultrasonik akan menghitung jarak apabila gelombang ultrasonik yang
dipancarkan trasmitter dapat diterima oleh receiver.
Gambar 3.14 Mulai Mendeteksi Space Parkir
Pada gambar di atas terlihat bahwa ultrasonik akan mendeteksi space
setelah 4 cm melewati halangan mobil yang telah terparkir sebelumnya.
Sedangkan optocoupler yang terpasang pada bagian mobil berada 6 cm dari
sensor kiri-belakang ini, jadi counter akan mulai menghitung pada saat 10 cm
setelah melewati halangan atau mobil yang terparkir sebelumnya. Counter akan
berhenti menghitung apabila sensor ultrasonik mendeteksi adanya halangan yang
berada di samping prototype mobil, seperti pada gambar berikut.
Jadi jika panjang ruang parkir ±70cm maka counter optocoupler akan
menghitung setelah ±10cm melewati halangan mobil yang terparkir sebelumnya
sehingga space yang terdeteksi sepanjang ±60. Counter akan menghitunng
sebanyak 19 kali dengan cara sebagai berikut:
1 kali putaran ban = 7 kali counter optocoupler = 22 cm
7 kali = 22 cm
panjang = 60 cm
counter = 420:22
= 19
Jadi 19 kali counter optocoupler akan sama dengan panjang ±60 cm. Saat
counter telah menghitung sebanyak 19 kali, mobil akan berhenti dan siap
melakukan proses parkir.
Gambar 3.16 Mobil Maju Mencari Ruang (space) Parkir 3.4.2 Proses Parkir
Pada proses kedua ini terdiri dari 2 tahapan, yaitu mundur melakukan
manuver parkir dan maju di dalam ruang parkir itu sendiri, berikut
a. Mobil Mundur Melakukan Manuver Parkir
Tahap kedua, yaitu mobil akan mundur masuk ke dalam ruang parkir,
melakukan manuver masuk ke dalam ruang (space) parkir. Pada tahap ini
sensor yang aktif adalah sensor kiri-depan dan belakang. Proses Fuzzy
terjadi pada tahap ini. Arah-arah serta besarnya steering dari prototype
mobil pada tahap kedua ini berdasarkan dari input-input dari kedua sensor
tersebut dan akan diolah secara logika Fuzzy menghasilkan besarnya
puataran steering selama proses pada tahap kedua ini berlangsung. Logika
Fuzzy yang digunakan akan dijelaskan pada bagian 3.5.
Gambar 3.17 Mobil Mundur Melakukan Manuver Masuk Ke Dalam Ruang (space) Parkir
b. Mobil Maju Di Dalam Ruang (Space) Parkir
Tahap ketiga, yaitu mobil akan maju jika sensor belakang mendeteksi
jarak terdekat dengan benda atau halangan yang berada di belakang mobil.
Pada tahap ini, sensor yang aktif yaitu sensor depan dan sensor belakang
Gambar 3.18 Mobil Maju Masuk Ke Dalam Ruang (space) Parkir
3.5 Logika Fuzzy Pada Sistem Pemandu Kendaraan Untuk Parkir Paralel Secara Otomatis
Logika Fuzzy pada sistem ini terdapat pada proses yang kedua, yaitu
proses mobil masuk dalam ruang (space) parkir. Input Fuzzy dari sistem parkir ini
berupa jarak yang didapat dari 2 buah sensor ultrasonik yaitu kiri-depan dan
belakang. Sedangkan output dari Fuzzy ini berupa putaran atau besarnya sudut
putar motor servo sebagai steering dari prototype mobil ini.
Setiap input dari logika Fuzzy ini mempunyai nilai keanggotaan
(membership function) yang direpresenatasikan dalam bentuk kurva segitiga dan
trapesium. Operator “AND” digunakan untuk mengkombinasikan dan
memodifikasi kedua input jarak dari sensor ultrasonik. Berikut membership
function dari setiap input-an dan output Fuzzy:
Keterangan:
Jarak dekat dari sensor kiri-depan direpresentasikan dengan kurva
trafesium dengan nilai domain diantara 0cm – 15cm.
Jarak sedang dari sensor kiri-depan direpresentasikan dengan kurva segita
dengan nilai domain diantara 10cm – 20cm.
Jarak jauh dari sensor kiri-depan direpresentasikan dengan kurva
trapesium dengan nilai domain dari 15cm hingga lenih dari 30cm.
Gambar 3.20 Membership Function untuk Sensor Belakang
Keterangan:
Jarak belakang dari sensor kiri-depan direpresentasikan dengan kurva
trafesium dengan nilai domain diantara 0cm – 30cm.
Jarak belakang dari sensor kiri-depan direpresentasikan dengan kurva
segita dengan nilai domain diantara 10cm – 50cm.
Jarak jauh dari sensor belakang direpresentasikan dengan kurva trapesium
Gambar 3.21 Output Berupa Steering Prototype Mobil
Keterangan:
P.Kiri : putar kiri dimana steering pada prototype mobil dapat bergerak
maksimal sejauh -72°.
Tetap : dimana steering dari prototype mobil berapa pada posisi normal
yaitu sebesar 0°.
P.Kanan : putar kanan dimana steering pada prototype mobil dapat
bergerak maksimal sejauh 72°.
Sedangkan untuk rule Fuzzy diperoleh dengan dengan cara mengukur
dan melakukan percobaan pada sistem parkir ini. Rule pada sistem pemandu
untuk parkir paralel secara otomatis ini sebanyak 15 rule dapat dilihat pada tabel
berikut:
Tabel 3.4 Rule Fuzzy Kiri-depan
Belakang Dekat Sedang Jauh
Dekat Tetap P.kiri P.kanan
Sedang P.kiri P.kanan P.kanan
Keterangan dari rule di atas:
Rule 1 : jika jarak kiri-depan “dekat” dan belakang “dekat” maka steering
akan “tetap”.
Rule 2 : jika jarak kiri-depan “dekat” dan belakang “sedang” maka
steering akan “putar kiri”.
Rule 3 : jika jarak kiri-depan “dekat” dan belakang “jauh” maka steering
akan “putar kiri”.
Rule 4 : jika jarak kiri-depan “sedang” dan belakang “dekat” maka
steering akan “putar kiri”.
Rule 5 : jika jarak kiri-depan “sedang” dan belakang “sedang” maka
steering akan “putar kiri”.
Rule 6 : jika jarak kiri-depan “sedang” dan belakang “jauh” maka steering
akan “putar kanan”.
Rule 7 : jika jarak kiri-depan “jauh” dan belakang “dekat” maka steering
akan “putar kanan”.
Rule 8 : jika jarak kiri-depan “jauh” dan belakang “sedang” maka steering
akan “putar kanan”.
Rule 9 : jika jarak kiri-depan “jauh” dan belakang “jauh” maka steering
49
PENGUJIAN DAN ANALISIS
4.1 Pengujian Dan Analisis Sistem
Pada bab ini akan diuraikan tentang proses pengujian sistem yang meliputi
pengukuran terhadap parameter-parameter dari setiap komponen per blok maupun
secara keseluruhan, dan melakukan uji coba terhadap aplikasi alat yang
diharapkan dapat berjalan sesuai perancangan pada bab sebelumnya, selanjutnya
akan dilakukan analisis terhadap aplikasi hasil pengukuran tersebut. Pengujian
dan analisis sistem ini bertujuan untuk mengetahui sistem kerja dari setiap
komponen input, proses, dan output apakah dapat berjalan sesuai target yang
diharapkan.
4.1.1 Pengujian Logika Fuzzy
Tujuan dari pengujian logika Fuzzy ini adalah untuk mengetahui proses
logika Fuzzy ini sebagai inti dari sistem pemandu kendaraan untuk parkir paralel
secara otomatis ini. Logika Fuzzy yang digunakan ini diprogram ke dalam
mikrokontroler sebagai pusat pengendalian sistem. Input-an logika Fuzzy pada
tugas akhir ini berupa jarak samping kiri yang didapat dari sensor SR-04
kiri-belakang dan jarak kiri-belakang dari prototype mobil remote yang didapat dari
sensor SR-04 bagian belakang. Kedua input-an ini akan diproses di dalam
mikrokontroler menggunakan logika Fuzzy yang akan menghasilkan output
Pengujian dari logika Fuzzy ini dilakukan dengan membandingkan hasil
output yang didapat menggunakan simulasi Matlab, pengujian program yang
dibuat menggunakan Codevison AVR dan pengujian perhitungan manual. Seperti
yang dijelaskan pada bab sebelumnya, bahwa tahapan membangun sebuah logika
Fuzzy terdiri dari 3 tahapan yaitu Fuzzification, Fuzzy Logic Inference dan
Defuzzification. Setiap input-an akan diproses secara bertahap mulai dari
menentukan membership function hingga menghasilkan output.
a. Hasil pengujian logika menggunakan simulasi Matlab :
Jika input kiri-depan = 10cm dan belakang = 27cm
Jika input kiri-depan = 15cm dan belakang = 30cm
Gambar 4.2 Hasil Simulasi Matlab Pada Pengujian Kedua
Jika input kiri-depan = 12cm dan belakang = 45cm
b. Hasil pengujian logika Fuzzy yang dibuat menggunakan software
CodeVision AVR dan ditampilkan ke LCD:
Jika input kiri-depan = 10cm dan belakang = 27cm
Jika input kiri-depan = 15cm dan belakang = 30cm
Jika input kiri-depan = 12cm dan belakang = 45cm
c. Hasil pengujian dengan perhitungan manual:
Jika input kiri-depan = 10cm dan belakang = 27cm
Rule Fuzzy
Kiri-depan
Belakang Dekat Sedang Jauh
Dekat 0,15 0 0
Sedang 0,85 0 0
Defuzzification
Jika input kiri-depan = 15cm dan belakang = 30cm
Kiri-depan Belakang
Jika input kiri-depan = 12cm dan belakang = 45cm
Defuzzification
Dari ketiga pengujian tersebut, dapat lihat perbandingan dari setiap output
yang dihasilkan. Tabel berikut menguraikan perbandingan hasil pengujian dari
ketiga cara yang telah dilakukan :
Tabel 4.1 Hasil Pengujian Logika Fuzzy
No Input Output
Dari tabel hasil pengujian logika Fuzzy terlihat bahwa output dari program
yang dibuat menggunakan Codevision AVR bernilai sama dengan simulasi
Matlab maupun perhitungan manual. Dengan begitu, program yang telah dibuat
menggunakan software Codevision AVR tersebut, dapat digunakan dalam tugas
akhir ini.
4.1.2 Pengujian Sensor SR-04
Tujuan pengujian untuk sensor SR-04 ini agar mengetahui kemampuan
sensor ini dalam mendeteksi jarak halangan yang berada di depan sensor.
Pengujian dilakukan sebanyak 25 kali dengan jarak halangan yang berbeda. Jarak
yang terukur oleh sensor akan ditampilkan ke LCD dibandingkan dengan jarak
Tabel 4.2 Hasil Pengujian Sensor SR-04
Berdasarkan tabel di atas dapat disimpulkan bahwa kemampuan sensor
SR-04 dalam mendeteksi halangan hingga sejauh 60 cm menghasilkan nilai yang
hampir sama dengan pengukuran sebenarnya, meskipun dalam pengujian sensor
ini sering terjadi error atau selisih pada jarak-jarak tertentu.
4.1.3 Pengujian Optocoupler
Pengujian ini dilakukan bertujuan untuk mengetahui parameter output
berupa logika high dan low pada optocoupler. Pengujian dilakukan dengan
memberikan tegangan sebesar 5V pada rangkaian, kemudian memutar roda cacah
dihasilkan saat roda cacah diputar berupa tegangan yang berlogika high dan low.
Pada tabel berikut diuraikan hasil pengujian optocoupler:
Tabel 4.3 Hasil Pengujian Optocoupler Tegangan input Posisi roda cacah Tegangan
output
Logika biner
5Volt
Menghalangi cahaya IR LED 4,9Volt 1
Meloloskan cahaya IR LED 0,85Volt 0
Dari tabel pengujian diatas terlihat bahwa optocoupler yang digunakan
menghasilkan tegangan output sebesar 4,9Volt berlogika high dan 0,85Volt
berlogika low. Logika high dan low ini akan menjadi input mikrokontroler,
sehingga dapat digunakan untuk menghitung panjang ruang parkir yang dilewati
oleh prototype mobil.
4.1.4 Pengujian PWM Sebagai Pengatur Kecepatan Motor DC
Pengujian PWM ini bertujuan untuk mengetahui pengaruh sinyal PWM
terhadap perubahan kecepatan motor DC. Seperti yang dijelaskan pada bab
sebelumnya, bahwa pengaturan kecepatan motor DC menggunakan PWM
dipengaruhi oleh lebar pulsa high dan low pada satu periode gelombang yang
diberikan, sehingga menghasilkan duty cycle. Duty cycle ini akan mempengaruhi
tegangan yang diberikan ke motor DC sehingga mempengaruhi kecepatan motor.
Pada pengujian dilakukan dengan memberikan variasi lebar pulsa high dan low
untuk menghasilakan duty cycle yang berbeda. Berikut tabel hasil pengujian motor
Tabel 4.4 Hasil Pengujian Motor DC
VFull Thigh Tlow Ttotal DutyCycle V=DutyCycle×Vfull V rata-rata
5 V
Dari tabel diatas terlihat bahwa semakin besar duty cycle yang diberikan,
maka tegangan rata-rata motor DC juga semakin besar sehingga kecepatan motor
DC juga akan semakin cepat. Duty cycle yang diberikan dapat diaatur dengan
mengganti nilai T high atau T low dari lebar pulsa PWM sesuai dengan keinginan.
4.1.5 Pengujian PWM Sebagai Pengatur Sudut Motor Servo
Pengujian PWM ini bertujuan untuk mengetahui pengaruh sinyal PWM
terhadap perubahan perubahan sudut motor servo. PWM sebagai pengaturan sudut
motor servo tidak jauh berbeda dengan pengaturan kecepatan motor DC yaitu
mengatur lebar pulsa high dan low pada satu periode gelombang yang diberikan.
Pada pengujian motor servo ini dilakukan dengan membandingkan lebar pulsa
referensi dengan hasil simulasi. Pengujian dilakukan sebanyak 3 kali dengan
menggunakan software Proteus untuk mensimulasikan hasil dari program yang
telah dibuat mengunakan software CodeVision AVR untuk mengatur sudut motor
Gambar 4.4 Sinyal Kontrol Motor Servo Sebagai Acuan Dalam Pengujian
Gambar di atas merupakan sinyal kontrol yang digunakan untuk mengubah sudut
motor servo. Sinyal di ataslah yang dijadikan acuan untuk menentukan T high dan
T low untuk pengontrolan motor servo ini.
Gambar 4.5 Hasil Pengujian Motor Servo Pertama
Pada gambar terlihat lebar pulsa sebesar 20ms dengan T high sebesar 1ms
Gambar 4.6 Hasil Pengujian Motor Servo Kedua
Pada gambar terlihat lebar pulsa sebesar 20ms dengan T high sebesar 1,5ms
menghasilkan pergerakan motor servo dengan sudut 0.
Gambar 4.7 Hasil Pengujian Motor Servo Ketiga
Pada gambar terlihat lebar pulsa sebesar 20ms dengan T high sebesar 2ms
menghasilkan pergerakan motor servo dengan sudut +90.
Dari ketiga hasil simulasi diatas terlihat bahwa program yang dibuat untuk