INTERNATIONAL CONFERENCE ON ROBOTIC
AUTOMATION SYSTEM
The 1st International Conference on Robotic Automation System 2011 is a forum for scientists, engineers, and practitioners to present their latest research results, ideas, developments and applications in the areas of Robotics, Artificial Intelligence Method & Applications, Mechatronics System & Automation and Biomedical Engineering.
PATRON
Dr Rozailan Mamat @ Ibrahim
(Rector, TATIUC)
ADVISORS
Prof. Dr Sazali Yaacob
(UNIMAP)
Prof. Dr Yoshiko Nomura
(MIE University)
Associate Prof. Bhaskar Sen Gupta
(Queen’s University Belfast)
Prof. Dr Ir. Anas m Fauzi
(Institut Pertanian Bogor)
GENERAL COMMITTEE
Dr Zunaidi Ibrahim
(General Chair)
Mohamad Redhwan Abd. Aziz
(Deputy General Chair)
CONFERENCE SECRETARIAT
Dr Rosliza Ramli (General Secretary)
Dr Ahmed Hamood Dabwan
Dr Nor Bahiyah Baba
Ir. Mohd Habir Ibrahim
Amelia Ahmad Nawawi
Amarah Abdul Karim
Hamdan Azmi Abdul Aziz
Kamrol Amri Mohamed
Mohd Hanipah Muda
Mohd Najib Muhamed
Md Khairil Hafizi Muhamad
Najihah Jusoh
Noraniah Abdul Aziz
Norzamziah Afzainizam
Ruzlaini Ghoni
Surairah Mohd Suhaimi
Syahrul Fahmy
Wan Zulkarnain Othman
Zudaini Said
ICORAS 2011 COMMITTEE
Samsi Md. Said
Dr Suditama Sulaiman
Ahmad Shahrizan Abdul Ghani
Damhuji Rifai
Kharudin Ali
Ng Yian Ying
Noraznafulsima Khamshah
Nur Najmiyah Jaafar
Nor Hana Mamat
Syahidatu Syima Syafie
Zulkifli Ismail
ADVISORY COMMITTEE
Prof. Dr Ir. Anas m Fauzi (Indonesia)
Prof. Dr Ir. Bustami Syam (Indonesia)
Prof. Dr Kobayashi (Japan)
Prof. Dr Ir. Bustami Syam (Indonesia)
Prof. Dr Ary Setijadi Prihatmanto
(Indonesia)
Prof. Dr Ir. Arief Syaichu Rohman
(Indonesia)
Prof. Dr Marzuki Khalid (Malaysia)
Prof. Dr Masataka Kubo (Japan)
Prof. Dr Mohd Yusoff Mashor (Malaysia)
Prof. Dr Sazali Yaacob (Malaysia)
Prof. Dr Shamsudin Amin (Malaysia)
Prof. Ju-Jang Lee(Korea)
Prof. Dr Nobuyuki Imanishi (Japan)
Prof. Jaegab Lee (Korea)
Assistant Professor Dr Afaneen
Alkhazraji (Iraq)
Assistant Professor Dr Ibrahim Khider
Eltahir (Sudan)
Assoc. Prof. Bhaskar Sen Gupta (UK)
Assoc. Prof. Dr Hamid Adom (Malaysia)
Assoc. Prof. Dr Ahmed N. Abdalla
(Malaysia)
Dr Ir. Desrial (Indonesia)
Dr Elango Natarajan (Malaysia)
Dr Kamarul Hawari Ghazali (Malaysia)
Dr M Faiz Syuaib (Indonesia)
Dr Mohammad Arifur Rahman (India)
Dr Phil Hackney (UK)
Dr Sam Herodian (Indonesia)
Dr Shahriman Abu Bakar (Malaysia)
Dr Ting Hua Nong (Malaysia)
DrZeyad Alfawaer (Lebanon)
Izadora Mustaffa (Malaysia)
Nurul Fajar Abd Manap (Malaysia)
CO-ORGANIZERS
Institut Pertanian Bogor, Indonesia.
MIE University, Japan.
Queen’s University Belfast, UK.
COPYRIGHT
All rights reserved. No part of this
document may be reproduced or
transmitted in any form or means
without written permission from
TATIUC. The information provided in
this document is provided on "as is"
basis and TATIUC disclaims any
warranties and shall not be liable for
commercial damage. Use of a term in
this book should not be regarded as
affecting the validity of any registered
trademark. TATIUC is not associated
with any product or vendor mentioned in
ICORAS 2011
International Conference On
Robotic and Automation System
23-24 May 2011
Terengganu, MALAYSIA
P
i
ORAL PRESEN T AT I ON
E 102
Development of Software for Mitsubishi RV-M1
Pardeep Sharma, Parveen Kalra and Rajesh Kumar
1
E 104
Multi-Agent Control Architecture of Mobile Manipulators: Grasping Objects of Simple Forms
R. Benbouali, A. Hentout and B. Bouzouia
5
E 105
Automatic Electrocardiographic Analysis Using Artificial Neural Network Models
Sri T.V.K.Hanumantha Rao, Saurabh Mishra and Sudhir Kumar Singh
11
E 106
Vision Based Obstacle Detection Mechanism of a Fixed Wing UAV
S.N. Omkar, Saurabh Mishra, Sanjay Tripathi, Gaurav Kumar
16
E 107
Analysis for Solving Travelling Salesman Problems
Khushmeet Kumar and Pardeep Sharma
22
E 108
Automatic Visual Inspection of Defects for Cylindrical Object's Surface
Mohammed A. H. Ali, Mohammed N. B. Ahmed, Ibrahim M. H. Sanhoury, Siti Fadilah B. Abd Latip and Jameel A. A. Mukred
27
E 110
Half Car Suspension System Using Fuzzy Logic Controller
A.A.Basari, M.Esro, R.A.Manap and S.Sapie
32
E 111
The Effectiveness of Industrial Networks Protocol in Automation System.
Muhamad Fahezal Ismail, Norsehah Abd Karim, Yusof Mohd Ekhsan and Muhammad Syazwan Mohd Rathi
37
E 112
Heuristic Algorithm for Edge Detection
Senthiil, A.N.Senthilve, T.Hemamalini, B.Ramesh Kumar, S.Vignesh Ram
42
E 113
Shape-Based Matching: Application of Edge Detection Using Harris Point Mohamad Haniff Harun, Marizan Sulaiman and Hairol Nizam Mohd Shah
45
E 114
General Algorithm of m-Multiple Coil Shape for Variable Links Hyper-Redundant Robotic Manipulator.
Annisa Jamali, Raisuddin Khan and Md. Mozasser Rahman
51
E 115
Sustainable Analysis of Lightweight Lift System Design for Disable People Using Finite Element.
S.F. Ismail, M.Y Taib and M.Ishak
58
E 116
Performance Comparison between MRAC and IMAC with Application to InnoSAT Control
M.N.Norhayati, M.Y.Mashor, S.M.Sharun, A.A.Azamimi, W.N.Hadani
62
E 118
Intelligent Controller for Differential Drive Wheeled Mobile Robot (WMR): A Comparative Analysis
Razif Rashid, I. Elamvazuthi, K.M. Begam, M. Luqman M. Zain and Lindasalwa Muda
68
E 121
Design and Modeling of Biped Robot With Heterogenous Leg
A M. Azmi Adly, I. Elamvazuthi, K.M. Begam, W. Amirfaiz and W. Faizura
73
E 122
Simulation of Humanoid Arm Using Fuzzy Technique
W. Amirfaiz W. Daud, I. Elamvazuthi, K.M Begam,W. Faizura and M.Azmi Adly
ii
E 123
Design and Analysis of Microheater Using Ansys
G.Sureshkannan, G.Mohan Kumar
82
E 128
Adaptive Fuzzy Logic Control for Non-Linear System
F.A. Bakri, M.Y. Mashor, A.R.M Saad, S.M. Sharun, M.N. Norhayati, Wan Nur Hadani
85
E 131
Feedback Linearization for Depth Positioning of a Spherical Underwater Robot Vehicle (URV)
M. Azfar Tajul Arifin, M.N. Karsiti and I. Elamvazuthi
89
E 132
Virtual Mobile Robot Simulation Using Microsoft Robotic Studio: 3D Modelling of Mobile Robot and its Integration into Visual Simulation Environment
Yusman Yusof, M. Fadzil Abu Hassan, Noor Jihan M. Saroni and W. M. Fathurrahman Che Wan Azizan
95
E 133
Determination of Speech Recognition Accuracy using DTW and MFCC Techniques
Lindasalwa Muda, K. M. Begam, I. Elamvazuthi, Razif Rashid and M. Luqman M. Zain
101
E 136
Malaysia Sign Language Recognition Using Central Moment Features and Neural Network Model
Mohd Shuhanaz Zanar Azalan, Rajkumar Palaniappan and Muhamad Zulhafis Bin Abu Zair
105
E 137
Sign Language Recognition based on Fuzzy Information of Arm Motions
Khairunizam Wan, Shahriman A.B, Siti Khadijah Za’aba, Mohd Azri Abd Aziz and Shamsul Azri Mohd Nor
109
E 138
Introduction on the Biomedical Applications of Atmospheric Plasma
S.K. Zaaba, Khairunizam Wan and A.B Shahriman
115
E 139
Adaptive Neuro-Controller for Three-Axis Attitude Control of Nano-Satellite
S. M. Sharun, M. Y. Mashor, M. N. Norhayati, W. N. Hadani, S. Yaacob
120
E 140
Hybrid Power Study for Irrigation and Flood Control System
A.B. Shahriman, M.M. Khalil, Khairunizam Wan, S.K. Zaaba, W.N.Imaduddin, D.Hazry, I.Zunaidi
126
E 141
Investigation on Different Emotion Elicitation Methods for Human Computer Interaction
Jerritta S, M Murugappan, R Nagarajan, Khairunizam Wan and S Arun
130
E 142
Application of Watershed Segmentation on RGB and HSI Model
H.N. Lim, E.U. Francis, M.Y. Mashor, R. Hassan
135
E 143
Design of a Micro-Controller Based Portable Three Phase Digital Power Meter
Syafiq Basri Shaari and I. Elamvazuthi
139
E 144
A Study on Different Driver Alertness Methods during Hypovigilance
S Arun, M Murugappan, Kenneth Sundaraj and S Jerritta
144
E 145
Design and Performance Test of Embeded Module Metering Device for Variable Rate Fertilizer Applicator
P.A.S. Radite, W. Hermawan, A. Azis, B. Budiyanto
149
E 146
Digital Camera Based Color Sensor for Determining Leaf Color Level of Paddy Plants
I.W. Astika, M. Solahudin, R. P. Setiawan, M. F. Syuaib, I. E. Nugroho, M. Ardiyansah
154
E 148
An Undergraduate Artificial Intelligence Laboratory: Colour Sensing Using Fuzzy Logic
Mohd Fadzil Abu Hassan, Yusman Yusof, Mohd Alif Syami Azmi and Mohd Nazrul Mazli
iii
E 149
Determining the Velocities Before and After Impact of Components in a Vibratory Part Feeder
M.Suresh, S.Udhayakumar and P.V.Mohanram
164
ET 106
Development of an Intelligent Control Green House
Muhammad Nasiruddin Mansor, Ruzlaini Ghoni, Noraznafulsina, Kharudin Ali,Muhammad Nor Safieni Sulaiman and Bahari A. Aziz
169
ET 107
Precision Analysis of Mobile Robot Map Making
Suditama, A.S. Samsi, L. Zulkarnain and A.B. Samat 173
ET 108
Automatic Balance Evaluator and Rehabilitation Mechanism
Suditama, I. B.I. Zunaidi, Z. Zuraida, S. Dinsuhaimi, Z.M. Normaini, A.B. Shahriman 179
ET 109
Path Planning for the Crazy Robot
A.A.Bahri, G.Ruzlaini, A.Kharudin, M.Nasiruddin and S.M. Nor Safieni
185
ET 110
Construction of Temperature Sensor Activated Fan Control
Muhammad Nor Safieni Sulaiman, Ruzlaini Ghoni, Kharudin, Ahmad Bahari A. Aziz and Mohd Nasiruddin Mansor
188
ET 111
Ant Colony Approach in Digital Image Processing – Review
Ng Yian Ying, Noraznafulsima Khamshah and Damhuji Rifai
191
ET 112
Temperature Compensation of a Thermal Flow Sensor by Using Temperature Network
Noraznafulsima Khamshah, Ahmed N. Abdalla, Ruzlaini Ghoni, Mohd Syafawi
193
ET 113
Performance Control of the Three-Phase an Induction Motor Couple to DC Motor in HEV Zulkarnain Lubis, Solly Aryza, Suditama Sulaiman
197
ET 114
A Binary Particle Swarm Optimization Approach for Routing in PCB Holes Drilling Process
Mohd Hafiz Othman, Amar Faiz Zainal Abidin, Asrul Adam, Zulkili Md Yusof, Zuwairie Ibrahim, Seri Mastura Mustaza, Lai Yee Yang
201
ET 115
Optimisation of Palm Oil Screw Press Machine Motor Current Load by Using Fuzzy Logic Control System
O. W. Zulkarnain, A.A. Mohamad Redhwan, M.Z. Norul Azlin
207
ET 116
Stabilise the Press Cage Pressure of Palm Oil Screw Press Machine Using Fuzzy Logic Control System
O. W. Zulkarnain, A.A. Mohamad Redhwan, M.Z. Norul Azlin
211
ET 117
Evaluating User’s Acceptance of Groupware System based on Computer Self-Efficiency: A Case Study at TATIUC
Wan Roslina, Syahrul Fahmy and Nurul Haslinda
215
ET 118
An Intelligent Reward Application for Bio-Informatics Knowledge Management System
Nurul Haslinda, Syahrul Fahmy and Wan Roslina
221
ET 119
Comparison of Search Schemes in the Design of a Memo Retrieval System
Aini Zuriyati, Syahrul Fahmy, Nazri Ibrahim
226
ET 120
Analysis of Sensor Perfomance In Line Following Robot
Muhammad Aiman Othman, Mohamad Zahari Zakari, Ruzlaini.G, Damhuji. R and Muhammad Luqman.M.Z
iv
ET 121
Smart Temperature Sensor for Patient Health Monitoring
Mohammad Hariz Syafiq Suhaimi and Ruzlaini Ghoni
234
ET 122
Assessing Groupware Acceptance Based on Computer Competency: A Case Study at TATIUC
Wan Roslina and Syahrul Fahmy
238
ET 123
Comparison of Search Schemes in the Design of an Information Retrieval System for Malay Language Fatwa Documents
Nazri Ibrahim, Syahrul Fahmy and Aini Zuriyati
244
ET 124
A Review Paper on Windows Gadget as a Tool for Office Automation
Syahrul Fahmy, Akhyari Nasir, Aini Zuriayati, Muriati Muda, Suhana Sulaiman, Wan Roslina and Nurul Haslinda
249
E 101
Active Suspension Using Optimal Control
Norsarizan Mat Youb, Mohd Ruddin Abd. Ghani, Hamzah Sakidin and Syed Najib Syed Salim
254
E 103
DC Motor Position Control with Disturbance Compensation
Nasimullah
255
E 109
Image Processing Technique Through Refinement Technique with Adaptive Simulation
PV Senthiil
256
E 117
Multiple Mobile Robots Trajectory Tracking While Maintaining Time-Varying Formations via Synchronization Approach
Ibrahim Mohamed Hafiz Sanhoury, Shamsudin H.M. Amin and Abdul Rashid Husain
257
E 119
Loosely Coupled Low Cost IMU\GPS Integration for Car Navigation Like Robot
O. M. Maklouf, A. Ghilla, S. A. Gashoot
258
E 120
Client Information Registration and Activities Tracking System
Akram M. Zeki, Augerto Manci and Ljuljzim Hodzic
259
E 124
Flight Stability in Hovering Of A Fixed-Wing Unmanned Aerial Vehicle (UAV)
A. G. Azlan and D. Hazry
260
E 125
The Effect of Anomaly Detection Accuracy in Varying the Angular Resolution of Sonar Sensor Using Repetitive Observation Strategy (ROS)
M.N.A.H. Sha’abani and M.F. Miskon
261
E 126
Hybrid Controller for Multi Fingered Robot Hand
Wan Faizura Tarmizi, I. Elamvazuthi, K.M. Begam, W. Amirfaiz and M. Azmi Adly
262
E 127
De-noising of Ultrasound Images of Bone Fracture In Wavelet Domain
M. Luqman M. Zain, I. Elamvazuthi, K.M. Begam, Razif Rashid and Lindasalwa Muda
263
E 129
Virtual Medical Instrument for OTOROB Based on LabVIEW for Acquiring Multiple Medical Instrument LCD Reading Using Optical Character Recognition
Muralindran Mariappan, Vigneswaran Ramu, Thayabaren Ganesan, Brendan Khoo T. T. and Kumarheshan Vellian
264
E 130
A Remote Navigation Methodology for a Four Wheel Rectangular Configured Holonomic Mobile Telemedicine Robot
Muralindran Mariappan, Vigneswaran Ramu, Thayabaren Ganesan, Brendan Khoo T. T. and Kumarheshan Vellian
v
E 134
Evaluation of EMG Signal Classification Techniques
I. Elamvazuthi, N.H.H.M., Hanif, P. Vasant and N.C., Sahoo
266
E 135
Hemodynamic Effect of Anastomosis Length and Angle in Side-to-side and End-to-side Radiocephalic Arteriovenous Fistula (RCAVF) using Computational Fluid Dynamics (CFD)
W.A.W. Hassan, K. Osman, M.R.A. Kadir, J. Haron
267
ET 101
Implementation of Fuzzy Logic using Industrial Robot: Part 1, Fuzzification
Samsi M S, N Nagarajan, Sazali Y,Zunaidi I, Anton S and Rozailan I
268
ET 102
Implementation of Fuzzy Logic using Industrial Robot: Part 2, Knowledge Embodiment and Defuzzification
Samsi M S, N Nagarajan, Sazali Y,Zunaidi I, Anton S and Rozailan I
269
ET 103
Blending Predictive and Reactive Contour Tracking Industrial Robot
Samsi M S, N Nagarajan, Sazali Y,Zunaidi I, Anton S and Rozailan I
270
ET 104
Comparison between Reactive Contour Tracking and the Hybrid Blending Contour Tracking approach for Industrial Robot Application
Samsi M S, N Nagarajan, Sazali Y,Zunaidi I, Anton S and Rozailan I
271
ET 105
Matlab-based Neural Network Modeling for Financial and Industrial Robot Predictive Contour Tracking Application
Samsi M S, N Nagarajan, Sazali Y,Zunaidi I, Anton S and Rozailan I
272
POST ER PRESEN T AT I ON
EPT 101
Comparison of Deliberative and Reactive Mobile Robot Navigation Systems
Nor Hana Mamat, Zunaidi Ibrahim and Samsi Md Said
273
EPT 102
A Survey on ICT Usage and Perception at TATI University College
Azliza Yaacob, Zurairah Ahmad, Zainuddin Othman and Aini Zuriyati Abdul Kadir
I nt e rna t iona l Confe re nc e on Robot ic Aut om a t ion Syst e m (I CORAS 2 0 1 1 )
1 4 9
Design and Performance Test of Embeded Module Metering
Device for Variable Rate Fertilizer Applicator
P.A.S. Radite 1, W. Hermawan 1, A. Azis1, B. Budiyanto2 1
Dept. Of Agricultural Engineering, Fac. of Agricultural Engineering andTechnology, Bogor Agricultural University, Indonesia. E-mail: [email protected] 2
Dept. of Meteorology and Geophysics, Fac. of Mathematics and Natural Sciences, Bogor Agricultural University, Indonesia
Abstract — Uniform rate of fertilizer application (URA) practice is disregarding the productive potential of the various areas within the field. Thus, it is not efficient method because some area is less fertilized and other is over fertilized. With variable rate application (VRA) machines, the dose and the position of application could be given precisely as required by crops. Machinery with variable rate capabilities impressed as technologically sophisticated and expensive. In Indonesia, implementation of VRT in crop production is also still questioned, because fear of the complicated and expensive prices of the machines. Therefore the objective of this research is to develop an embeded system for variable metering device of granular applicator. The metering was equipped with two rotor, which could be operated as single rotor or double rotor. The dose of granular fertilizer could be controlled by controlling the rotation of the rotor. The rotation of the rotor was controlled using digital PID algorithm. The result of the test showed that using single rotor the output of urea, SP-36 and NPK are 0.84, 0.96 and 1.2 g/rotation respectively. Test on double rotor showed that the output of urea, SP-36 and NPK are 1.14, 2.22 and 2.1 g/rotation respectively. All results showed that the prototype of metering device can control fertilizer dose of urea, SP-36 and NPK fertilizer precisely with coefficient of determination of more than R2=0.99. For field operation in the future, the developed VRT applicator will be mounted on multi-purpose vehicle which was modified from riding type rice transplanter. Position of the vehicle in the field will be acquired using agriculture type RTK DGPS.
INTRODUCTION
Design Of Variable Rate Applicator
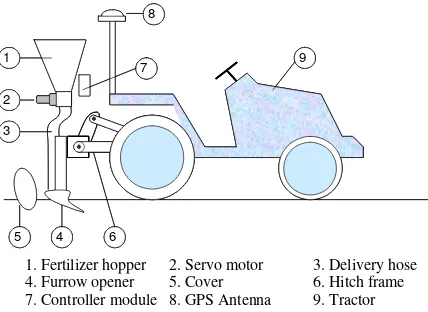
Vehicle: Concept design of developed VRT granular fertilizer applicator is shown in Fig.1. In this concept, the applicator is mounted on a multipurpose vehicle or light tractor using three-point hitch. The concept of
VRT applicator has four mains components, electric parts (motor and controller), fertilizer bins with total capacity 120 liters, 2-4 metering devices and 4- 8 nozzle spreaders.
The applicator works as follow; first the fertilizer was metered by a roller feeder, the grains are then released gravitationally or transported pneumatically
by pressured air stream, through delivery hoses and finally put in the soil. The fertilizer is put into the soil
to dept of 5-10 cm, in order to avoid vapor losses in dry season or losses due to water runoff during rainy
season.
Fig.1. Concept of variable rate applicator
As shown in Fig. 2, computer or controller module was utilized to organize the system. This machine performed variable rate application based on fertilization mapped. The map contained desired rates of application (kg/ha) as well as their position in the field will be used to guide the operation of the machine in the field. Change of the desired application rate was implemented by precisely control the rotor speed of metering device while monitoring the ground speed of the vehicle An agriculture purpose RTK-DGPS with accuracy of 5 to 10 cm is used to perform accurate positioning during fertilization, and the data were sent to the PC computer through serial port (RS232) at 5 Hz. While
1. Fertilizer hopper 2. Servo motor 3. Delivery hose
4. Furrow opener 5. Cover 6. Hitch frame
7. Controller module 8. GPS Antenna 9. Tractor
8
1
2 3
5 4 6
7 9
8 8
1 1
2 2 3 3
5
5 44 66 7
I nt e rna t iona l Confe re nc e on Robot ic Aut om a t ion Syst e m (I CORAS 2 0 1 1 )
1 5 0
the speed of the vehicle was monitored, through the vane disc and a magnetic proximity sensor
Fig.2. System control of variable metering.
Metering rotor: As shown in Fig.3, the metering rotor was star-types with 6 fins with cylindrical notched chambers. For single rotor, if the rate of application is decided, the rotor speed (Nm, in rps) can be simply calculated as follows:
Fig 3. Design of metering rotor
)/Q
S W D
(
N
m
10
s (1) where,Nm = Rotor speed (rps)
Q = Metered fertilizer per rotation(g/r)
S = Ground speed of the applicator (m/s)
W = Effective width covered by one metering device (m)
Ds = Rate of application (kg/ha)
Motor and Controller: DC geared motor was use because it is tough and reliable for field application, beside it is also cheap and availability in local market. Through a careful design a DC motor can be directly coupled to the shaft of fertilizer metering device for simple construction. A 30 W DC motor has specification of 22 V/ 2600 rpm equipped with 1/20 reduction gear box. The whole system is knock-down, thus easy for maintenance. The motor is equipped with an optical rotary encoder of 30 pulses per rotation.
The controller module for metering system controller consists of microcontroller module (DT-51 Minsys), Smart Peripheral Motor Controller (SPC Motor Controller, and motor driver (EMS Hybrid 30A) made in Innovative Electronics. For flexibility, a 3 x4 keypad was functioned as input device, while a 2
x 20 line LCD display was used as output of the controller. With input and output devices, the controller parameters could easily be adjusted and the result could be easily monitored.
The specification microcontroller used was 8 bit micro-processor base on AT89C51, 8kb EEPROM expandable to 64k, 4 I/O ports (PPI portA, portB and portC, port1), LCD port, and serial port interface for communication with PC computer, laptop or netbook. A pulse width modulation (PWM) driver (EMS Driver from Innovative Electronics) with hybrid transistors was used. The motor driver has ranges output up to 36 V at maximum current up to 30 A. This driver was interfaced to micro-controller through Smart Peripheral Controller (SPC). SPC motor controller has 2 channel input driver, equipped with four 16 bit counters. Communication between SPC, EMS driver and micro-controller could utilize i2c protocol, UART or parallel port.
Material And Method
Materials of experiment: Design of granular fertilizer applicator with volumetric metering system is adopted and modified to become variable output. Variable dose is performed by controlling the rotation of metering device rotor by meant of controlling the rotation of a dc gear motor. With digital control it is possible to set the desired speed of the rotor very precise and accurate.
For this purposed, material of experiment will be consists of metering device, dc geared motor, rotary encoder, counter, interface controller, motor driver, usb to serial port and laptop computer. Computer was use to program the micro-controller, and also to monitor and record the data during process development. C programming language was use to developed the system control and data acquisition. Data acquisition was done through serial communication by using usb to RS-232 cable. Data were displayed in the laptop monitor and recorded in computer's hard drives. Microsoft excel was used to do further data processing.
In this technique, the map-based application method was adopted. In this method, soil and plant were sampled and laboratory analyzed prior to fertilizer application. After further calculations, a fertilization map was constructed. The fertilization map contained information of the required application rates (kg/ha) on each plot in the field. The work of soil and plant analysis was conducted by another team of precision farming research, and there is not discuss further.
DGPS
Controller
driver
Speed sensor Counter
board Computer
Fertilization map
Air manifold Blower
Nozzles DC motors
2nd PTO
Rotary encoder
1st PTO
D/A board PID
Metering devices
Data line
I nt e rna t iona l Confe re nc e on Robot ic Aut om a t ion Syst e m (I CORAS 2 0 1 1 )
1 5 1
Fig. 4. Block diagram of control system
Block diagram of the system is presented in Fig.4. This system is an open-loop system except at the metering device which used a closed control system to adjust the rotation of the metering rotor. To performed variable rate application in the field, micro-controller should manage accurate information of vehicle position in the field and dose of application. The change of rate of application is done by precisely control the metering rotor while monitoring the vehicle's ground speed. The ground speed was measured by a segmented vane disc and a proximity sensor will be sampling at 1Hz. While an agriculture purposes RTK-DGPS having accuracy 5 to 10 cm will be used to perform accurate positioning in real time (5Hz) during field operation.
System identification: The metering system
approximated with linear model of first order system with delay, as represented in Laplace transform as follows;
s
T
1
Ke
)
s
(
C
)
s
(
R
)
s
(
G
ds
(2)Where,
R = speed of rotor or output of control
C = set point or input control
K = gain of system (rps)
Ts= time constant (s)
d = delay time (s)
The value of K, T and d was determined by using step response model. Curve fitting using Least Square Method was adopted to fit data of response and model as stated in equation (2). Procedure of system identification is presented in figure 5.
Fig.5. Schematic of system identification
Digital PID Control: Digital control based on embedded system will be used in this research. A feedback control with a digital PID compensator, therefore, was adopted to improve the robustness of control. For this purpose, the rotor speed was
monitored using an optical rotary encoder with resolution 30 pulses per rotation. A 16 bit counter was used to count the pulses every 20 ms.
Figure 6. Schematic diagram of digital control
A feedback control is designed to generate an output that causes some corrective effort to be applied to a process so as to drive a measurable process variable(r) towards a desired value(c) known as the set-point, as shown in Figure 5. PID digital is implemented as follows:
)
T
e
e
2
e
(
K
Te
K
)
e
e
(
K
C
C
n n1 n2 D n I 1 n n p 1 n n (3 ) Where,Cn = next value of control
en = error of process
Kp, Ki, KDis PID constant for proportional, integral
and differential component.
RESULTS AND DISCUSSIONS
Fertilizer characteristic
Table 1: Particle Size Distribution dan Bulk Density of The Fertilizer
Type of fertilize r
Particle size distribution (%) Bulk
density
(g/cm3)
>4.76 mm 2.36-4.76 mm 1.4-2.36 mm <1.4 mm
Urea 0 3.17 75.70 21.13 0.635 SP-36 9.20 55.27 35.53 0 1.009 NPK 2.81 39.70 57.40 0.09 0.908
System identification
Open loop control was done with PWM set point 50, 100, 150, and 250 respectively to run the motor. The speed of the rotor was then monitored and recorded in laptop computer at sampling rate of 30 ms. Rotary encoder was used to sense the rotation speed of the rotor, and output pulse was then counted using 16 bit counter. The data was then plot and curved fitted using model in equation (2), and the result is presented in Fig. 7.
Driver
Metering Device
Servo motor Signal
Generator Counter
computer Encoder
Model
Input signal System
Metering Device
Output signal
r(S) Gp(S) c(S)
T s + 1
G
c(z)
+
- PID compensator
r
c
k
PWM Controller
G
p(s)
Rotary encoder
1
motor
G
m(s)
Gp(s) = KeI nt e rna t iona l Confe re nc e on Robot ic Aut om a t ion Syst e m (I CORAS 2 0 1 1 )
1 5 2
Fig. 7. Curve fitting of model to step response of the system
In order to tune the compensator, the process gain
K, the time constant T and the dead time d of the system were determined in the same manner as previously explained.
Stair-step response
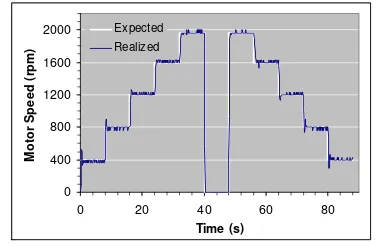
Without properly controlled, motor could not give precise response, for stair step set point change as illustrated in Fig.8 (upper). However, this process could be improved as feed back control is applied in the system as it was shown in Fig.8 (lower), where all the setting points could be followed very precise in quick response either in low speed as well as high speed rotation of rotor.
In order for control loop to work properly, the PID compensator must be properly tuned. Process gain was defined as rotor speed per second (rps) output (Hz) per unit of controller input. Least square fitting was used, where the process gain K= 1, time constant T= 0.054s and dead time d= 0.030s Tuning of the controller was done using modified Ziegler-Nichols method, where the PID constants were defined as the following equations, where:
Kp = Cp 1.2 T/(K d),
Ki = Ci 0.5/d and (4)
Kd = Cd 0.5 d.
Fig. 8. Stair step response : without control (upper) and with PID control (lower)
Tough the torque on the rotor fluctuated because of frictions and other causes, such as cyclic loading as well as various granules sizes, the controller able to maintain the speed of motor in a good accuracy. It is shown in Fig. 8, digital PID compensator obviously improved the performance of motor. Control loop was run at 16 Hz or period of sampling 60 ms.
Ouput of metering
Tests were conducted on several rotor speed set point 400, 800, 1200, 1600 and 2000 rpm. Output of metered fertilizer was then collected and measured using digital balance for period of time 5, 10, 15, 20 and 25 second respecitvely. Output rate of the respective fertilizer was then calculated using least square fitting of the respective data. All tests showed that linear realationship were obtained with coefficient of determination higher than 99% and typical results are presented in Fig. 9.
At every setting of rotor speeds, the ouput rates were then calculated. At tested speed the output rate of Urea fertiliser was 5.55, 12:11, 17.84, 23.66 and 29.64 g/s respectively. For TSP-36 fertilizer, the output rate was 7:54, 15.2 , 22:09, 28.91 and 33.27 g/s respectively. While tests on NPK fertilzer gave ouput rate of 8.4, 16:25, 24.62, 32.42 and 40.5 g/s.
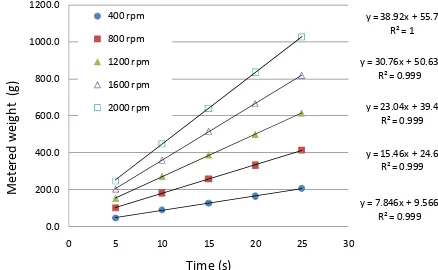
Fig. 9. Metered weight of NPK fertilizer on single rotor operation
As it is shown in Fig. 10, result of the tests using double rotors also gave good linier relatinship. Testing at rotor speed 400, 800, 1200, 1600 and 2000 rpm provided ouput rates of 7.85, 15:46, 23:04, 30.76
0.0 0.2 0.4 0.6 0.8 1.0
0 0.12 0.24 0.36 0.48 0.6 0.72 0.84 0.96
Time (s) R o to r S p eed G a
in PWM 250
PWM 150 PWM 100 PWM 50
Step Response Model
03 . 0 d , 54 . 0 T , 1
K
0 400 800 1200 1600 2000
0 10 20 30 40
Time (s) M o tor S p e e d (r pm ) Expected Realized 0 400 800 1200 1600 2000
0 20 40 60 80
Time (s) Mot o r S p e e d (r pm ) Expected Realized
y = 8.4x ‐5.2 R² = 0.997 y = 16.25x + 2.2
R² = 0.999 y = 24.62x + 0.333
R² = 0.998 y = 32.42x + 0.8
R² = 0.998 y = 40.5x ‐4.7
R² = 0.998
0.0 200.0 400.0 600.0 800.0 1000.0 1200.0
0 5 10 15 20 25 30
Me te re d we ig h t (g )
Time (s)
400 rpm 800 rpm
1200 rpm 1600 rpm
2000 rpm
I nt e rna t iona l Confe re nc e on Robot ic Aut om a t ion Syst e m (I CORAS 2 0 1 1 )
1 5 3
and 39.92 g/s for Urea fertilizer; 23:33, 39.24, 54.34 , 68.92 and 82.54 g/s for TPS-36 fertilizer, and 22.92, 38.48, 51.34, 66.53 and 78.80 g/s NPK fertilizer.
Fig. 10. Metered weight of Ureafertilizer on double rotor operation
Dose of application
The result of variable rate fertilizer tests of the metering device using single rotor indicated that the rate of urea, SP-36 and NPK are 0.84, 0.96 and 1.2 g/rotation respectively. Results of the tests using double rotor indicated that the rate of urea, SP-36 and NPK are 1.14, 2.22 and 2.1 g/rotation respectively. All results showed that the prototype of metering device can control precisely.
This prototype will be applied to rice plants. If we assume the distance between rows of rice plants (width application) 30 cm and forward speed of applicator (tractor) is 1.8 km / h or 0.5 m / s, the rate of output of then fertilizer dosage will be obtained for 56 kg / ha of Urea. If the applicator uses four units will be obtained by fertilizing dose of 224 kg / ha. Meanwhile, by using double rotors in which the output rate of urea at 1:14 g / rotation, then fertilizer doses obtained by 76 kg / ha, so by using four units of the metering device the dose could be as much as 304 kg / ha. Since the recommended fertilizer dose of urea is between 250-300 kg/ha (Ministry of Agriculture, 2007) thus it can be achieved by using four units of metering devices.
CONCLUSIONS
The prototype of variable rate granular fertilizer applicator has been built and tested. The unit equipped with metering device that can be controlled electronically. Change of dose can be done on the basis of rotor speed rotation which was controlled using PID digital control.
Result of the tests on set-point 400, 800, 1200, 1600 and 2000 rpm shows that the ouput rates were proportional with speed and consistent among the tests. Single rotor had metering output for Urea, SP-36 and NPK at 0.84, 0.96 and 1.2 g/rotation respectively. While double rotor had metering ouput for Urea, SP-36 and NPK at 1.14, 2.22 and 2.1 g/rotation respectively. All results showed that the
prototype of metering device can control precisely. For application using Urea fertilizer, the prototype with four metering device suitable to be used at maximum dose 250-300 kg/ha.
ACKNOWLEGMENT
The authors gratefully acknowledge the support of the, Directorate General of Higher Education, Ministry of National Education of Indonesia through IPB I-MHERE Competition Scheme Project which provided a research grant for this work.
REFERENCES
[1] Radite, P.A.S., M Umeda, M. Iida, M. Khilael, “Variable rate applicator for paddy field”. The 93rd Intl meeting of ASAE, Milwaukee, Wisconsin, USA., 9-12 July, 2000. ASAE paper No.001156.
[2] Radite, P.A.S., W. Hermawan, B. Budiyanto, and M. A. Azis, “Development of variable rate fertilizer applicator module based on 8-bit embedded system”. Proc. of International Seminar of AFITA , October 4-6, 2010, Bogor.
[3] Iida, Michihisa, M. Umeda, P. A. S. Radite, “Variable Rate Fertilizer Applicator for Paddy Field”. The 94rd Intl meeting of ASAE, Sacramento, California, USA, July 29-August 1, 2001. ASAE paper No. 011115. [4] Deptan, Rekomendasi Pemupukan N, P dan K pada
Padi Sawah Spesifik Lokasi: Peraturan Menteri Pertanian No 40 /Permentan/ OT.140/ 04/ 2007. Jakarta. 2007.
y = 7.846x + 9.566 R² = 0.999 y = 15.46x + 24.6
R² = 0.999 y = 23.04x + 39.4
R² = 0.999 y = 30.76x + 50.63
R² = 0.999 y = 38.92x + 55.7
R² = 1
0.0 200.0 400.0 600.0 800.0 1000.0 1200.0
0 5 10 15 20 25 30
Me
te
re
d
we
ig
ht
(g
)
Time (s) 400 rpm