RANCANGAN PENGOLAH TAMPILAN DAN PENYIMPAN
HASIL ALAT TIMBANG BERBASIS SERAT OPTIK
MENGGUNAKAN MIKROKONTROLER ATMEGA32
SKRIPSI
DESY HERVINA SARI
090801032
DEPARTEMEN FISIKA
FAKULTAS MATEMATIKA DAN ILMU PENGETAHUAN
ALAM
UNIVERSITAS SUMATERA UTARA
MEDAN
RANCANGAN PENGOLAH TAMPILAN DAN PENYIMPAN
HASIL ALAT TIMBANG BERBASIS SERAT OPTIK
MENGGUNAKAN MIKROKONTROLER ATMEGA32
SKRIPSI
Diajukan Untuk Melengkapi Tugas dan Memenuhi Syarat
Mencapai Gelar Sarjana Sains
DESY HERVINA SARI
090801032
DEPARTEMEN FISIKA
FAKULTAS MATEMATIKA DAN ILMU PENGETAHUAN
ALAM
UNIVERSITAS SUMATERA UTARA
MEDAN
PERNYATAAN
RANCANGAN PENGOLAH TAMPILAN DAN PENYIMPAN HASIL ALAT TIMBANG BERBASIS SERAT OPTIK MENGGUNAKAN
MIKROKONTROLER ATMEGA32
SKRIPSI
Saya mengakui bahwa skripsi ini adalah hasil kerja saya sendiri, kecuali beberapa kutipan dari ringkasan yang masing-masing disebutkan sumbernya.
Medan, Juli 2013
PENGHARGAAN
Alhamdulillahirobbil’alamin, puji syukur saya panjatkan atas rahmat Allah SWT, yang senantiasa selalu memberikan kehidupan, kesehatan, kecerdasan,
rezeki, mukjizat, keberkahan dan kemudahan-Nya dalam menyelesaikan skripsi
ini. Shalawat serta salam bagi junjungan Nabi Muhammad SAW atas teladannya.
Terimakasih yang sebesar-besarnya kepada kedua orang tua saya Heri
Sunandar dan Sri Yulianti Novida, yang tiada henti memberikan dukungan dan
doa yang tulus kepada saya.
Dalam penyusunan skripsi ini, saya banyak mendapatkan bimbingan dan
bantuan dari berbagai pihak baik secara moril maupun material. Untuk itu saya
mengucapkan terimakasih yang sebesar-besarnya kepada :
1. Bapak Dr. Marhaposan Situmorang selaku ketua jurusan dan pembimbing
I yang telah memberikan bimbingan dan masukan-masukan yang sangat
membangun selama menyusun skripsi ini.
2. Seluruh staf dan dosen di jurusan Fisika FMIPA USU yang telah
membantu penyelesaian skripsi ini dalam hal administrasi dan
masukan-masukannya.
3. Bapak Dwi Hanto, M.Si selaku pembimbing II yang telah membimbing
seluruh penelitian pada skripsi ini, juga memberikan masukan-masukan
yang sangat membangun. Saya juga berterimakasih kepada beliau karena
telah memberikan pengalaman-pengalaman yang sangat berharga dalam
bidang instrumentasi selama melakukan penelitian.
4. Seluruh staf, teknisi, dan pekerja di Pusat Penelitian Fisika (P2F) LIPI
Serpong, Bapak Bambang Widiyatmoko, Bapak Andi Setiono, Bapak
Hendra Adinanta, Bapak Imam Mulyanto, Bapak Prabowo Puranto,
Bapak Thomas Budi Waluyo, Bapak Pardamean Sebayang, Bapak
Lukman, Bapak Masbah Siregar, Ibu Ani, dan lain-lain yang tidak dapat
5. Kakek dan nenek saya, Rumani Sutrisno dan Nafsiah Risnaini, serta
opung Amelia pane yang tiada henti memberikan dukungan dan doa
kepada saya.
6. Adik – Adik saya Indah Permata Sari, M. Malik Ridwan, dan Dian Purnama Sari dan seluruh keluarga saya.
7. Bagus Hady Wiyandha yang telah banyak membantu saya dalam
menyelesaikan skripsi ini, juga senantiasa selalu memberikan dukungan,
doa, dan semangat.
8. Sahabat saya Cindy Al Kindi, Tian Havwini, Hilda Ayu Marlina, Seri
Dermayu Siregar, Kharismayanti Ritonga, Sally Irvina Ritonga, dan Fitri
Hidayati Sinaga, yang telah berjuang bersama-sama di Jurusan Fisika
FMIPA USU dan selalu memberikan dukungan, doa, dan semangat
kepada saya.
9. Seluruh asisten, koor. Asisten, dan staf Laboratorium Ilmu Dasar (LIDA)
Fisika USU, seluruh adik-adik kelas dan kakak-kakak kelas di Jurusan
Fisika FMIPA USU yang telah membantu dukungan, doa, maupun
semangat kepada saya.
10.Ibu Neneng Sutarsih, Kak Lina Mariani, Kak Hikma Panjaitan, Kak Putik
Riski, Bang Maulana Sebayang, dan Ibu Siregar yang telah menjadi
keluarga baru dan banyak membantu saya selama penelitian di Serpong.
Dan kepada teman-teman, saudara-saudara, abang/kakak dan rekan-rekan
lainnya yang tidak dapat saya tuliskan satu persatu, terimakasih untuk dukungan,
doa, dan semangat yang telah diberikan, smoga Allah SWT selalu melimpahkan
rahamat-Nya kepada kita semua.
Menyadari akan keterbatasan ilmu yang saya miliki, juga keterbatasan waktu,
saya merasa bahwa skripsi ini masih jauh dari sempurna, untuk itu dengan segala
kerendahan hati, saya mengharapkan kritik dan saran yang bersifat membangun
demi menyempurnakan skripsi ini.
Medan, Juli 2013
Desy Hervina Sari
RANCANGAN PENGOLAH TAMPILAN DAN PENYIMPAN HASIL ALAT TIMBANG BERBASIS SERAT OPTIK MENGGUNAKAN
MIKROKONTROLER ATMEGA32
ABSTRAK
Telah dirancang pengolah tampilan dan penyimpan hasil alat timbang berbasis serat optik menggunakan mikrokontroler ATmega32. Alat timbang ini dapat menampilkan beban yang terukur pada layar LCD karakter berukuran 4 x 40 dengan menampilkan informasi beban yang terukur dalam satuan kilo gram dan disertai kapan data tersebut diambil. Data-data tersebut kemudian akan disimpan pada SD card dengan keterangan waktu dan beban terukur dalam format teks. Perancangan alat ukur beban ini cukup sederhana yang terdiri dari sensor beban serat optik, mikrokontroler, dua buah push button, RTC, SD card dan LCD. Alat ukur ini diuji dengan diberikan beban secara statik antara 0 sampai dengan 100 kg dengan memberikan performa statis yang baik dari segi validitas maupun tingkat akurasi dibawah 10 %.
DESIGN DISPLAY PROCESSING AND STORAGE RESULTS SCALES BASED OPTICAL FIBER USING MICROCONTROLLER ATMEGA32
ABSTRACT
Has been designed display processing and storage results based on optical fiber scales using microcontroller ATmega32. These scales can show a measurable load on the LCD screen measuring 4 x 40 character display with load information measured in units of kilo grams and accompanied when the data is retrieved. These data will then be stored on the SD card with the time and expense information measurable in text format. The design of the load measuring tool is fairly simple consisting of a fiber-optic load sensors, microcontroller, two push button, RTC, SD card and LCD. This instrument was tested with a given static load is between 0 to 100 kg with providing static performance both in terms of the validity and accuracy rate below 10%.
.
DAFTAR ISI
Bab 2 Tinjauan Pustaka 2.1 Cahaya dan laser 5
Bab 3 Metodologi Penelitian 3.1 Perancangan Sistem 22
3.2 Sistem Kerja Sensor 27
3.3 Pengujian Sensor 27
3.3.1 Pengujian Validasi Awal 28
3.3.2 Pengujian Rangkaian Penguat Instrumentasi 29
3.3.3 Pengujian ADC Terhadap Tegangan Keluaran dengan Rangkaian Penguat Instrumentasi 29
3.3.4 Pengujian Validasi Beban 30
Bab 4 Hasil dan Pembahasan
4.1 Pengujian Validasi Awal 33
4.2 Pengujian Rangkaian Penguat Instrumentasi 33
4.3 Pengujian Validasi ADC 34
4.4 Pengujian Validasi Beban 35
Bab 5 Kesimpulan dan Saran 5.1 Kesimpulan 39
5.2 Saran 39
Daftar Pustaka 40
DAFTAR TABEL
Halaman
Tabel 2.1 Fungsi Khusus Port A 17
Tabel 2.2 Fungsi Khusus Port B 18
Tabel 2.3 Fungsi Khusus Port C 18
Tabel 2.4 Fungsi Khusus Port D 19
DAFTAR GAMBAR
Halaman Gambar 2.1 Bagian kabel serat optik dan Model perambatan cahaya
pada serat optik 8
Gambar 2.2 Makrobending dan Mikrobending 9
Gambar 2.3 Peristiwa Rugi-Rugi Akibat Pembengkokan Mikro 11
Gambar 2.4 Skematik Mikrobending Serat Optik 11
Gambar 2.5 Skematik Sensor Serat Optik dengan Prinsip Mikrobending 12
Gambar 2.6 Bentuk fisik Mikrokontroler ATmega32 14
Gambar 4.2 Tegangan masukan dan tegangan keluaran pada penguat instrumentasi 31
Gambar 4.3 Pengujian ADC setelah penambahan penguat instrumentasi 32
Gambar 4.4 Grafik Validasi Beban 32
Gambar 4.5 Tampilan Alat Timbang 33
DAFTAR LAMPIRAN
Halaman
Lampiran A Program 42
RANCANGAN PENGOLAH TAMPILAN DAN PENYIMPAN HASIL ALAT TIMBANG BERBASIS SERAT OPTIK MENGGUNAKAN
MIKROKONTROLER ATMEGA32
ABSTRAK
Telah dirancang pengolah tampilan dan penyimpan hasil alat timbang berbasis serat optik menggunakan mikrokontroler ATmega32. Alat timbang ini dapat menampilkan beban yang terukur pada layar LCD karakter berukuran 4 x 40 dengan menampilkan informasi beban yang terukur dalam satuan kilo gram dan disertai kapan data tersebut diambil. Data-data tersebut kemudian akan disimpan pada SD card dengan keterangan waktu dan beban terukur dalam format teks. Perancangan alat ukur beban ini cukup sederhana yang terdiri dari sensor beban serat optik, mikrokontroler, dua buah push button, RTC, SD card dan LCD. Alat ukur ini diuji dengan diberikan beban secara statik antara 0 sampai dengan 100 kg dengan memberikan performa statis yang baik dari segi validitas maupun tingkat akurasi dibawah 10 %.
DESIGN DISPLAY PROCESSING AND STORAGE RESULTS SCALES BASED OPTICAL FIBER USING MICROCONTROLLER ATMEGA32
ABSTRACT
Has been designed display processing and storage results based on optical fiber scales using microcontroller ATmega32. These scales can show a measurable load on the LCD screen measuring 4 x 40 character display with load information measured in units of kilo grams and accompanied when the data is retrieved. These data will then be stored on the SD card with the time and expense information measurable in text format. The design of the load measuring tool is fairly simple consisting of a fiber-optic load sensors, microcontroller, two push button, RTC, SD card and LCD. This instrument was tested with a given static load is between 0 to 100 kg with providing static performance both in terms of the validity and accuracy rate below 10%.
.
BAB 1 PENDAHULUAN
1.1. Latar Belakang
Pada perkembangan teknologi, di samping load cell dan starin gauge, saat ini telah
banyak penelitian yang mengembangkan serat optik sebagai sensor beban. Pemilihan
serat optik ini disebabkan kestabilan dan daya tahannya.
Dalam dekade terakhir, sensor beban serat optik, didasarkan pada perubahan
pada parameter sinyal optik karena regangan serat optik yang diberi beban, telah
mendapat perhatian. Sensor ini lebih tahan lama, relatif murah dalam pembuatan
dan operasi. Namun, serat optik terutama digunakan sebagai detektor untuk
pengukuran beban karena akurasi rendah (khususnya penimbang beban bergerak)
dan ketergantungan tinggi terhadap kondisi cuaca.
Pada 1990-an , muncul sensor gaya berbasis serat optik untuk penimbang dan
kontrol sistem gerak pada kendaraan atau transportasi. Pengggunaan serat optik
disetujui karena biaya rendah, kemudahan instalasi di jalan-jalan dengan lalu
lintas yang padat. Kabel serat optik ditempatkan dalam alur sempit di seberang
jalan yang dilapisi dengan karet yang tahan, dan transmisi tekanan ban kendaraan
pada kabel serat optik. Arus lalu lintas tidak boleh terganggu untuk waktu yang
lama, sehingga kemudahan dan kecepatan instalasi sensor melebihi kekurangan
sensor yaitu akurasi pengukuran rendah.
Serat optik memiliki banyak kelebihan di antaranya adalah serat optik dapat
dipergunakan dengan kecepatan yang tinggi, hingga mencapai beberapa gigabit/detik.
Karena murni terbuat dari kaca dan plastik maka signal tidak terpengaruh pada
gelombang elektromagnetik dan frekuensi radio. Ukurannya kecil dan ringan sehingga
sangat memudahkan pengangkutan dan pemasangan di lokasi. Serat optik juga sangat
aman dipasang di tempat-tempat yang mudah terbakar karena tidak akan terjadi hubungan
api pada saat kontak atau terputusnya fiber optik. Pada prinsipnya, dalam penggunaan
serat optik kita akan menemukan bending baik itu dalam bentuk makro ataupun mikro.
kekurangan dari serat optik inilah yang dapat dimanfaatkan sebagai sensor. Pada
aplikasinya, masih sangat jarang ditemukan penggunaan dan pemanfaatan sensor beban
berbasis serat optik tersebut. Perlu dilakukan penelitian dan pengembangan lebih lanjut
untuk menyempurnakan pembuatan sensor beban berbasis serat optik, khususnya
menggunakan prinsip mikrobending.
Pada penerapannya, sensor juga sangat memerlukan alat baca yang dapat
menampilkan serta menyimpan data-data hasil pengukuran. Mikrokontroler merupakan
device yang baik untuk keperluan kontrol, yang memiliki kapasitas memori yang cukup
besar untuk memprogram pembacaan dan penyimpanan data-data hasil pengukuran
sensor. Oleh karena itu, dilakukan penelitian rancangan alat untuk pengukuran beban
berbasis serat optik menggunakan pengolah utama mikrokontroler ATmega32, yang
dapat menampilkan dan menyimpan data hasil pengukuran.
1.2. Rumusan Masalah
Berdasarkan latar belakang yang ada, maka perumusan masalah dari penelitian ini
adalah
1. Bagaimana merancang suatu alat ukur beban berdasarkan mikrobending dengan menggunakan serat optik?
2. Bagaimana merancang sistem mikrokontroler ATmega32 sehingga dapat menampilkan dan menyimpan hasil pengukuran?
1.3 Batasan Masalah
Adapun batasan masalah yang akan dibahas dalam penelitian ini adalah :
1. Sensor yang digunakan adalah sensor beban berbasis serat optik dengan prinsip mikrobending buatan Pusat Penelitian Fisika (P2F) – LIPI
2. Beban yang diuji adalah beban dalam keadaan statis dengan variasi beban sebesar 0, 20 kg, 40 kg, 60 kg, 80 kg, dan 100 kg.
3. Sebagai pusat pengolahan data, digunakan Mikrokontroller AVR ATmega 32 dengan ADC 10 bit
5. Menampilkan hasil pengukuran beban menggunakan LCD karakter 4 x 40
dan menyimpan hasil pengukuran dalam format teks pada SD CARD
1.4 Tujuan Penelitian
Adapun tujuan dari penelitian ini adalah,
1. Untuk mengidentifikasi beban dan tegangan hasil pengukuran dari alat timbang berbasis serat optik, dengan merancang tampilan menggunakan mikrokontroler
ATmega32.
2. Untuk mengetahui akurasi alat.
1.5. Manfaat Penelitian
Manfaat yang diharapkan dari penelitian ini adalah:
1. Dapat dipergunakan sebagai perbandingan penerapan alat timbang beban contohnya pada aplikasi penimbangan kendaraan di jalan raya.
2. Dapat mempermudah monitoring pengukuran beban.
1.6 Metodologi Penulisan
Adapun metode penelitian yang digunakan dalam menyusun dan menganalisa tugas akhir ini adalah:
1. Studi literatur yang berhubungan dengan perancangan dan pembuatan alat
ini.
2. Perencanaan dan pembuatan alat
3. Merencanakan peralatan yang telah dirancang baik software maupun
hardware.
4. Pengujian alat
5. Peralatan yang telah dibuat kemudian diuji apakah telah sesuai yang telah
direncanakan
Penelitian ini dilakukan di Laboratorium Fiber Optik, Pusat Penelitian Fisika
(P2F) Lembaga Ilmu Pengetahuan Indonesia (LIPI) kawasan Puspiptek, Serpong,
Tangerang Selatan.
1.8 Sistematika Penulisan
Sistematika penulisan dalam tugas akhir ini terdiri dari 5 bab, yaitu:
BAB 1 : PENDAHULUAN
Berisi latar belakang permasalahan, batasan masalah, tujuan
pembahasan, metodologi pembahasan, sistematika
penulisan dan relevansi dari penulisan skripsi ini.
BAB 2 : LANDASAN TEORI
Membahas tentang teori, serat optik, prinsip mikrobending,
mikrokontroller ATmega32, sensor, pengolahan data dan
teori dasar alat-alat pendukung lainnya.
BAB 3 : METODOLOGI PENELITIAN
Membahas tentang perencanaan dan pembuatan sistem
secara keseluruhan.
BAB 4 : PENGUJIAN RANGKAIAN
Berisi tentang uji coba alat yang telah dibuat,
pengoperasian dan spesifikasi alat.
BAB 5 : PENUTUP
Merupakan kesimpulan dari pembahasan pada bab-bab
BAB 2
TINJAUAN PUSTAKA
2.1.Cahaya dan Laser
Cahaya adalah energi berbentuk gelombang elekromagnetik yang kasat mata
dengan panjang gelombang sekitar 380–750 nm. Pada bidang fisika, cahaya adalah radiasi elektromagnetik, baik dengan panjang gelombang kasat mata
maupun yang tidak. Selain itu, cahaya adalah paket partikel yang disebut foton.
Kedua definisi tersebut merupakan sifat yang ditunjukkan cahaya secara
bersamaan sehingga disebut "dualisme gelombang-partikel". Paket cahaya yang
disebut spektrum kemudian dipersepsikan secara visual oleh indera penglihatan
sebagai warna. Bidang studi cahaya dikenal dengan sebutan optika, merupakan
area riset yang penting pada fisika modern.
Studi mengenai cahaya dimulai dengan munculnya era optika klasik yang
mempelajari besaran optik seperti: intensitas, frekuensi atau panjang gelombang,
polarisasi dan fase cahaya. Sifat-sifat cahaya dan interaksinya terhadap sekitar
dilakukan dengan pendekatan paraksial geometris seperti refleksi dan refraksi, dan
pendekatan sifat optik fisisnya yaitu: interferensi, difraksi, dispersi, polarisasi.
Masing-masing studi optika klasik ini disebut dengan optika geometris dan optika
fisis.
Laser (singkatan dari bahasa Inggris: Light Amplification by Stimulated
Emission of Radiation) merupakan mekanisme suatu alat yang memancarkan
radiasi elektromagnetik, biasanya dalam bentuk cahaya yang tidak dapat dilihat
maupun dapat lihat dengan mata normal, melalui proses pancaran terstimulasi.
Pancaran laser biasanya tunggal, memancarkan foton dalam pancaran koheren.
Laser juga dapat dikatakan efek dari mekanika kuantum.
Dalam teknologi laser, cahaya yang koheren menunjukkan suatu sumber
cahaya yang memancarkan panjang gelombang yang diidentifikasi dari frekuensi
yang sama, beda fase yang konstan dan polarisasinya. Selanjutnya untuk
menghasilkan sebuah cahaya yang koheren dari medium lasing adalah dengan
laser dengan amplituda-konstan (dikenal sebagai CW atau gelombang
berkelanjutan), atau detak, adalah dengan menggunakan teknik Q-switching,
modelocking, atau gain-switching.
Dalam operasi detak, dimana sejumlah daya puncak yang lebih tinggi dapat
dicapai. Sebuah medium laser juga dapat berfungsi sebagai penguat optik ketika
di-seed dengan cahaya dari sumber lainnya. Sinyal yang diperkuat dapat menjadi
sangat mirip dengan sinyal input dalam istilah panjang gelombang, fase, dan
polarisasi; Ini tentunya penting dalam telekomunikasi serat optik.
Penggunaan cahaya sebagai pembawa informasi sebenarnya sudah banyak
digunakan sejak zaman dahulu, baru sekitar tahun 1930-an para ilmuwan Jerman
mengawali eksperimen untuk mentransmisikan cahaya melalui bahan yang
bernama serat optik. Percobaan ini juga masih tergolong cukup primitif karena
hasil yang dicapai tidak bisa langsung dimanfaatkan, namun harus melalui
perkembangan dan penyempurnaan lebih lanjut lagi. Perkembangan selanjutnya
adalah ketika para ilmuwan Inggris pada tahun 1958 mengusulkan prototipe serat
optik yang sssampai sekarang dipakai yaitu yang terdiri atas gelas inti yang
dibungkus oleh gelas lainnya. Sekitar awal tahun 1960-an perubahan fantastis
terjadi di Asia yaitu ketika para ilmuwan Jepang berhasil membuat jenis serat
optik yang mampu mentransmisikan gambar.
Di lain pihak para ilmuwan selain mencoba untuk memandu cahaya melewati
gelas (serat optik) namun juga mencoba untuk ”menjinakkan” cahaya. Kerja keras
itupun berhasil ketika sekitar 1959 laser ditemukan. Laser beroperasi pada daerah
frekuensi tampak sekitar 1014 Hertz - 15 Hertz atau ratusan ribu kali frekuensi
gelombang mikro.
Pada awalnya peralatan penghasil sinar laser masih serba besar dan
merepotkan. Selain tidak efisien, ia baru dapat berfungsi pada suhu sangat rendah.
Laser juga belum terpancar lurus. Pada kondisi cahaya sangat cerah pun,
pancarannya gampang meliuk-liuk mengikuti kepadatan atmosfer. Waktu itu,
sebuah pancaran laser dalam jarak 1 km, bisa tiba di tujuan akhir pada banyak titik
dengan simpangan jarak hingga hitungan meternya sangat tinggi, kurang dari 1
Dalam bahasa sehari-hari artinya serat yang sangat bening dan tidak
menghantar listrik ini sedemikian murninya, sehingga konon, seandainya air laut
itu semurni serat optik, dengan pencahayaan cukup mata normal akan dapat
menonton lalu-lalangnya penghuni dasar Samudera Pasifik. Seperti halnya laser,
serat optik pun harus melalui tahap-tahap pengembangan awal. Sebagaimana
medium transmisi cahaya, ia sangat tidak efisien. Hingga tahun 1968 atau
berselang dua tahun setelah serat optik pertama kali diramalkan akan menjadi
pemandu cahaya, tingkat atenuasi (kehilangan)-nya masih 20 dB/km. Melalui
pengembangan dalam teknologi material, serat optik mengalami pemurnian,
dehidran dan lain-lain. Secara perlahan tapi pasti atenuasinya mencapai tingkat di
bawah 1 dB/km.
2.2. Sensor
Sensor adalah suatu peralatan yang digunakan untuk mendeteksi adanya
perubahan parameter fisik, kimia, dan sebagainya. Dengan pengertian lain, sensor
juga dapat dikatakan sebagai peralatan yang digunakan untuk merubah suatu
besaran fisik menjadi besaran listrik sehingga dapat dianalisa dengan rangkaian
listrik tertentu.
Sesuai perkembangan teknologi, sensor dapat dibuat dan dikemas dengan cara
yang lebih ekonomis, mudah, dan lebih konvensional. Secara umum, sensor dapat
dikelompokkan menjadi 3 bagian berdasarkan fungsi dan kegunaannya, yaitu:
1. Sensor thermal, untuk mendeteksi gejala perubahan panas atau suhu.
Contohnya; termokopel, RTD, termistor, dan lain-lain.
2. Sensor mekanis, untuk mendeteksi perubahan gerak mekanis, seperti
pergeseran, gerak lurus dan melingkar, tekanan, dan sebagainya. Contohnya;
LVDT, strain gauge, load cell, dan lain-lain.
3. Sensor optik, untuk mendeteksi perubahan cahaya dari sumber cahaya,
pantulan, ataupun bias cahaya. Contohnya; photo cell, photo diode, dan
2.3. Serat Optik
Serat optik (optical fibre/fiber optic) merupakan media pandu gelombang
(cahaya) yang bekerja didasarkan adanya efek pantulan sempuma oleh karena
adanya perbedaan indeks bias material. Serat optik terdiri dari inti (core) dan
pembungkus (cladding) dan model perambatan cahaya ditunjukkan dalam
Gambar 2.1.
Gambar.2.1 Bagian kabel serat optik dan Model perambatan cahaya pada serat optik
1. Core adalah kaca tipis yang merupakan bagian inti dari serat atau inti fisik yang mengirim sinyal data optik dari sumber cahaya ke alat penerima yang berupa untai
tunggal kontinyu dari kaca atau plastik. Semakin besar core maka semakin banyak
cahaya yang dapat dilewatkan dalam kabel.
2. Cladding adalah materi yang mengelilingi inti yang berfungsi memantulkan sinar kembali ke dalam inti(core), atau layer/lapisan serat yang berfungsi sebagai
pembatas energi elektromagnetik yang terlalu besar, gelombang cahaya dan
penyebab pembiasan pada struktur inti. Pembuatan cladding yang cukup tebal
memungkinkan medan serat tidak dipengaruhi oleh perambatan disekitar bahan
sehingga bentuk fisik serat tidak cacat.
3. Buffer Coating adalah plastik pelapis yang melindungi serat dari kerusakan. lapisan plastik disekitar core dan cladding ini juga berfungsi memperkuat inti serat,
membantu penyerapan dan sebagai pelindung ekstra pada pembengkokan kabel.
Cahaya akan merambat didalam serat optik karena dipantulkan dengan
sempurna pada batas antar core dan cladding. Dalam perambatannya cahaya
mengalami pengurangan daya (loss ) akibat adanya penyerapan oleh material fiber
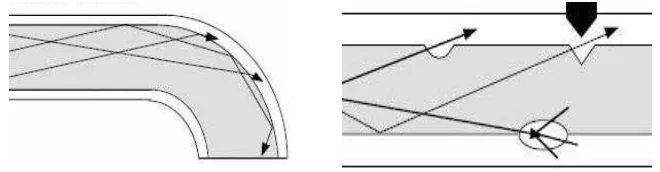
Gambar 2.2. Bending loss (atau rugi rugi pembengkokan) merupakan salah satu
dari beberapa sumber loss serat optik. Rugi rugi ini disebabkan oleh
pembengkokan serat optik melebihi diameter tertentu. Rugi rugi semacam ini
dalam komunikasi serat optik sangat merugikan.
Namun dari sisi lain fenomena ini dapat dimanfaatkan sebagai sensor.
Gambar.2.2 Makrobending dan Mikrobending
Gelombang cahaya yang merambat didalam serat optik ragam tunggal
(tepatnya: didalam inti/core serat) akan terdistorsi bila seratnya dilengkungkan.
Kecepatan cahaya yang merambat pada bagian dalam lengkungan hampir lebih
lambat daripada yang bagian luarnya untuk mempertahankan bentuk muka
gelombang.
Ini berarti nilai indeks bias inti serat pada bagian tersebut lebih kecil bila
dibandingkan saat serat dalam keadaan lurus. Semakin kecil jari-jari lengkungan
maka nilainya semakin mendekati nilai indeks bias selubung cladding sehingga
makin banyak cahaya yang keluar dari inti serat , atau semakin besar ruginya.
Serat optik memiliki keunggulan yang signifikan dibandingkan media
transmisi kawat konvensional. Keunggulan tersebut antara lain adalah:
1. Rugi transmisi rendah
2. Bandwidth lebar
3. Ukuran kecil dan ringan
Untuk itu biasanya serat optik digunakan untuk media transmisi sinyal digital.
Untuk pemilihan serat optik memiliki pilihan single-mode atau multi-mode dan
pilihan antara step index atau graded index.
Pemilihan ini tergantung jenis sumber cahaya yang digunakan dan besarnya
dispersi maksimum yang diijinkan. Untuk sumber cahaya LED (Light Emitting
Diode), biasanya digunakan serat multi-mode, meskipun LED jenis edgeemitting
bisa digunakan dengan serat single-mode dengan laju sampai 560 Mbps sepanjang
beberapa kilometer.
Untuk Laser dioda, bisa digunakan single-mode atau multimode. Serat
single-mode mampu menyediakan produk laju data-jarak yang sangat bagus (mampu
mencapai 30 Gbps.km).
2.4. Bending
Bending yaitu pembengkokan serat optik yang menyebabkan cahaya yang
merambat pada serat optik berbelok dari arah transmisi dan hilang. Sebagai
contoh, pada serat optik yang mendapat tekanan cukup keras dapat menyebabkan
ukuran diameter serat optik menjadi berubah, sehingga mempengaruhi sifat
transmisi cahaya di dalamnya.
Rugi-rugi akibat pelengkungan serat optik dibedakan menjadi dua macam
yaitu :
a) Macro Bending/Pembengkokan Makro
Rugi-rugi macro bending terjadi ketika sinar atau cahaya melalui serat optik
yang dilengkungkan dengan jari-jari lebih lebar dibandingkan dengan diameter
serat optik sehingga menyebabkan hilangnya daya. Jumlah radiasi optik dari
lengkungan serat tergantung kekuatan medan dan kelengkungan jari-jari.
b) Micro Bending/Pembengkokan Mikro
Pembengkokan mikro terjadi karena ketidakrataan pada permukaan batas
proses pengkabelan ataupun ketika proses penarikan saat instalasi seperti terlihat
pada Gambar 2.3.
Gambar 2.3.Peristiwa Rugi-Rugi Akibat Pembengkokan Mikro
2.5. Mikrobending
Sensor yang berbasis intensitas membutuhkan lebih banyak cahaya dan
karena itu biasanya menggunakan serat multimode dengan inti yang lebar. Ada
berbagai mekanisme seperti rugi daya optik akibat mikrobending, redaman, dan
bidang lepas yang dapat menghasilkan perubahan hasil ukur yang diinduksi dalam
intensitas optik yang disebarkan oleh serat optik.
Keuntungan dari sensor ini adalah kesederhanaan implementasi, biaya
rendah, kemungkinan menjadi multiplexing, dan kemampuan untuk tampil
sebagai sensor yang didistribusikan secara nyata. Salah satu sensor berbasis
intensitas adalah sensor mikrobend, yang didasarkan pada prinsip bahwa mekanik
tikungan mikro yang periodik dapat menyebabkan energi dari mode dipandu
untuk digabungkan dengan mode radiasi dan akibatnya menghasilkan redaman
cahaya yang ditransmisikan.
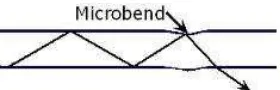
Seperti yang terlihat pada Gambar.2.4, sensor terdiri dari dua pelat beralur
dan di antara kedua pelat terdapat serat optik. Pelat atas dapat bergerak sebagai
respon terhadap tekanan. Ketika radius tikungan serat melebihi sudut kritis yang
diperlukan untuk membatasi cahaya ke area inti, cahaya mulai bocor ke cladding
mengakibatkan modulasi intensitas.
Adapun penjelasan yang signifikan yaitu ketika serat terkena tikungan kecil
atau gangguan, suatu bagian tertentu dari propagasi cahaya dalam inti serat
digabungkan dalam mode radiasi dan hilang. Mode penggabungan dapat dicapai
dengan menggunakan pelat bergelombang yang merubah bentuk serat menjadi
serangkaian tikungan. Oleh karena itu, mikrobending menyebabkan intensitas
cahaya menurun. Dengan memantau dan menghubungkan hilangnya intensitas
cahaya, berbagai jenis sensor mikrobend dapat dirancang. Wilayah penginderaan
sensor mikrobend terdiri dari dua pelat bergelombang, disebut lempeng deformer.
Serat optik ditekan dengan memberi gaya ke bawah diperas bawah kekuatan
diterapkan karena lipatan seperti yang ditunjukkan pada Gambar 2.5.
Gambar 2.5.Skematik Sensor Serat Optik dengan Prinsip Mikrobending
Sensor mikrobending serat optik adalah jenis sensor serat berdasarkan prinsip
tekukan yang terstruktur yang dapat menyebabkan hilangnya intensitas cahaya,
yang terdiri dari susunan lekukan termodulasi dan serat optik. Kinerja sensor
mikrobending serat optik ditentukan oleh susunan lekukan (bending), maka
metode modulasi lekukan (bending) digunakan untuk menghasilkan periodik
lekukan (bending) pada serat optik.
Desain sensor yang dibuat yaitu plat bergerigi atau bergelombang pada sisi
gangguan mikrobending dan mengarahkan pancaran (mentransmisikan) gangguan
tersebut. Cahaya yang keluar dan menembus pembungkus (jacket) menyebabkan
intensitas cahaya output berkurang. Besarnya gangguan dapat diperoleh dengan
mendeteksi variasi intensitas cahaya, dan tekanan pada sensor mikrobending serat
optik dapat diperoleh.
Penelitian ini didasari untuk mencari pengaruh pemberian massa beban
terhadap intensitas keluaran serat optik sehingga dapat dimanfaatkan untuk sensor
beban. Sebagaimana kita ketahui bahwa serat optik selain banyak digunakan
dalam sistem komunikasi juga dapat digunakan sebagai sensor besaran fisis.
Sebagai contoh, sensor kelembaban, temperatur, konsentrasi dan lain sebagainya.
Sebagai sumber cahaya digunakan Laser.
Prinsip kerja serat optik menggunakan prinsip pembiasan dan pemantulan
yang berhubungan dengan indeks bias bahan. Dengan memanfaatkan karakteristik
serat optik yang mengalami kehilangan daya akibat pembengkokan, dapat
dimanfaatkan untuk sensor tekanan.
Pada serat optik kehilangan daya dapat diakibatkan pembengkokan serat
optik, dengan memberi massa beban pada serat optik dapat dilihat pengaruh
tekanan pada besarnya bengkokan sehingga semakin besar daya yang hilang.
Dalam penelitian ini dibuat probe sensor tekanan pada bagian tengah dengan
melepas jaket pelindung serat optik. Cahaya yang masuk serat optik akan
mengalami kehilangan daya ketika mengalami bengkokan, sedangkan bengkokan
ini berbanding lurus dengan beban yang diberikan.
2.6. Photodetector
Photodetector atau detektor cahaya adalah sebagai alat penerima fungsi dari
penerima komunikasi optik. Photodetector mengubah sinyal optik menjadi sinyal
elektrik. Keluaran dari penerima adalaha sinyal elektrik yang memenuhi
spesifikasi dari pengguna kekuatan sinyal, level impedansi, bandwidth, dan
Bentuk sistem photodetector termasuk dalam alat penerima yang sesuai,
biasanya adalah semikonduktor fotodioda yang berasal dari komponen optik
gelombang cahaya ke alat photodetector.
2.7. AVR Mikrokontroler ATmega32
Mikrokontroler jika diartikan secara harfiah, berarti pengendali berukuran
mikro, merupakan sebuahdevice yang di dalamnya sudah terintegrasi dengan I/O
port dan memoriROM (Read Only Memory) dan RAM (Random Acces Memory)
sehingga dapat digunakan untuk berbagai keperluan kontrol.
Gambar 2.6 Bentuk Fisik Mikrokontroler ATmega32
Berbeda denganmikrokomputer yang memiliki bagian-bagiantersebut secara
terpisah, mikrokontroler mengkombinasikan bagian tersebut dalam tingkat chip.
AVR ATmega merupakan seri mikrokontroler 8 bit yang berarsitektur RISC
(Reduce Instruction Set Computing).
Inti AVR adalah kombinasi berbagai macam instruksi dengan 32 register
serba guna. Register-register tersebut terhubung langsung dengan ALU
(Arithmetic Logic Unit) yang memungkinkan 2 register independent untuk
diakses dalam satu pelaksanaan instruksidengan 1 siklus detak.
Keuntungan dari arsitektur ini adalah kode program yang lebih efisien
sementara keberhasilan keseluruhansepuluh kali lebih cepat dibandingkan dengan
CISC (Complex Instruction Set Computing) yang konvensial. Kelebihan dari
1. Mempunyai performa tinggi (berkecepatan akses maksimum 16 MHz) tetapi
hemat daya
2. Memori untuk program flash cukup besar yaitu 32 Kb
3. Memori internal (SRAM) cukup besar yaitu 2 Kb
4. Mendukung hubungan serial SPI
5. Tersedia 3 channel timer/counter (2 untuk 8 bit dan 1 untuk 16 bit)
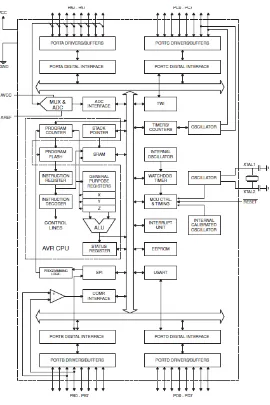
Gambar 2.7 berikut ini menunjukan arsitektur ATmega32.
Gambar 2.7. Arsitektur ATmega32
Kecepatan eksekusi ditentukan dari hasil pembangkitan detak pada blok
osilator internal. Detak juga dipergunakan sebagai dasar pembangkitan timer,
baudrate untuk komunikasi serial. Penggunaan fungsi timer dapat dapat pula
dimodekan sebagai sumber interupsi.
ATmega32 dilengkapi dengan ADC (Anolog to Digital Convertion) 10 bit
dengan multiplek untuk 8 jalur masukan, dimana ADC dapat juga dipergunakan
sebagai sumber interupsi. Pemilihan saluran dan proses konversi dilakukan
dengan memberikan data pada register yang berkaitan. Kelengkapan lain adalah
untuk fungsi komunikasi serial, dimana terdapat tiga format komunikasi yang
dapat digunakan yaitu USART (Universal Synchronous and asynchronous
Interface).
Semua fasilitas serial dapat dipergunakan dalam variasi kecepatan transmisi
yang sangat bergantung pada besarnya penggunaan sumber detak dan pengisian
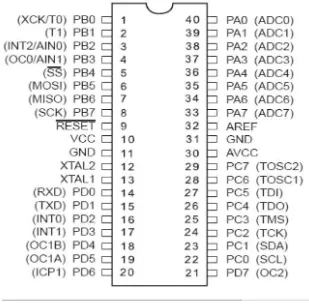
register yang berkaitan. Adapun susunan kaki mikrokontroler ATmega32
ditunjukan pada gambar 2.8berikut ini.
Penjelasan konfigurasi pin pada mikrokonroler ATmega32 secara umum:
a. Pin 1 sampai 8 (Port B) merupakan port paralel 8 bit dua arah (bitdirectional), yang dapat digunakan untuk general purpose dan special feature
b. Pin 9 (Reset) jika terdapat minimum pulse pada saat active low
c. Pin 10 (VCC) dihubungkan ke VCC (2,7 – 5,5 Volt) d. Pin 11 dan 31 (GND) dihubungkan ke Vss atau Ground
e. Pin 12 (XTAL 2) adalah pin masukan ke rangkaian osilator internal. Sebuah osilator kristal atau sumber osilator luar dapat digunakan
f. Pin 13 (XTAL 1) adalah pin keluaran ke rangkaian osilator internal. Pin ini dipakai bila menggunakan osilator kristal
g. Pin 14 sampai 21 (Port D) adalah 8 bit dua arah (bitdirectional), yang dapat digunakan untuk general purpose dan special feature
h. Pin 22 sampai 29 (Port C) adalah 8 bit dua arah (bitdirectional), yang dapat digunakan untuk general purpose dan special feature
i. Pin 30 adalah Avcc pin penyuplai daya untuk port A dan ADC dan dihubungkan ke Vcc. Jika ADC digunakan maka pin ini dihubungkan ke Vcc
j. Pin 32 adalah AREF pin yang berfungsi sebagai referensi untuk pin analog jika ADC digunakan
k. Pin 33 sampai 40 (Port A) adalah 8 bit dua arah (bitdirectional), yang dapat digunakan untuk general purpose dan special feature
Penjelasan konfigurasi pin pada mikrokontroler ATmega32 yang mempunyai fungsi
khusus yaitu:
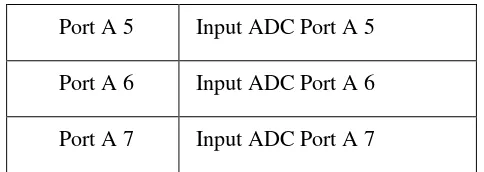
a.Pin 33 sampai 40 (Port A) dapat digunakan sebagai Tabel. 2.1 Fungsi Khusus Port A
Port A 0 Input ADC Port A 0
Port A 1 Input ADC Port A 1
Port A 2 Input ADC Port A 2
Port A 3 Input ADC Port A 3
Port A 5 Input ADC Port A 5
Port A 6 Input ADC Port A 6
Port A 7 Input ADC Port A 7
b.Pin 1 sampai 8 (Port B) dapat digunakan sebagai
Tabel. 2.2 Fungsi Khusus Port B
Port B 0 T0 (Timer/Counter 0 External Counter Input) XCK (USART External Clock Input/Output)
Port B 1 T1 (Timer/Counter 1 External Counter Input)
Port B 2 AIN0 (Analog Comparator Positive Input) INT2 (External Interupt 2 Input)
Port B 3 AIN1 (Analog Comparator Negative Input)
OC0 (Timer/Counter 0 Output Compare Match Output)
Port B 4 SS (SPI Slave Select Input)
Port B 5 MOSI (SPI Bus Master Output/Slave Input)
Port B 6 MISO (SPI Bus Master Input/Slave Output)
Port B 7 SCK (SPI Bus Serial Clock)
c.Pin 22 sampai 29 (Port C) dapat digunakan sebagai Tabel. 2.3 Fungsi Khusus Port C
Port C 0 SCL (Two-wire Serial Bus Clock Line)
Port C 1 SDA (Two-wire Serial Bus Data Input/Output Line)
Port C 2 TCK (JTAG Test Clock)
Port C 3 TMS (JTAG Test Mode Select)
Port C 4 TDO (JTAG Test Data Out)
Port C 6 TOSC1 (Timer Oscillator Pin 1)
Port C 7 TOSC2 (Timer Oscillator Pin 2)
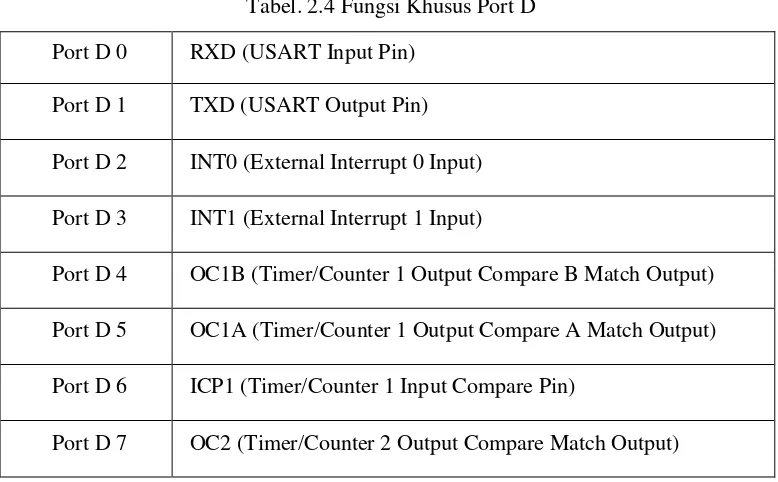
d.Pin 14 sampai 21 (Port D) dapat digunakan sebagai Tabel. 2.4 Fungsi Khusus Port D
Port D 0 RXD (USART Input Pin)
Port D 1 TXD (USART Output Pin)
Port D 2 INT0 (External Interrupt 0 Input)
Port D 3 INT1 (External Interrupt 1 Input)
Port D 4 OC1B (Timer/Counter 1 Output Compare B Match Output)
Port D 5 OC1A (Timer/Counter 1 Output Compare A Match Output)
Port D 6 ICP1 (Timer/Counter 1 Input Compare Pin)
Port D 7 OC2 (Timer/Counter 2 Output Compare Match Output)
Mikrokontroler Atmega 32 merupakan low power CMOS mikrokontroler
8-bit yang dikembangkan oleh Atmel dengan arsitektur RISC (Reduced Instruction
Set Computer) sehingga dapat mencapai throughput eksekusi instruksi 1 MIPS
(Million Instruction Per Second).
RTC (Real Time Clock) biasa digunakan untuk pewaktu dengan osilator terpisah.
Komunikasi RTC dengan mikrokontroler adalah dengan I2C yaitu antarmuka dua jalur
bus yaitu SDA (Serial DAta Line) dan SCL (Serial Clock Line). Setiap perangkat yang
terhubung dialamatkan secara software dengan alamat yang unik. Pada jalur tersebut
terdapat komunikasi master-slave diantara dua perangkat yang terhubung dengan
kecepatan transfer sebesar 100 Kbit/s dalam mode standar, 400 Kbit/s dalam mode cepat,
dan 3,4 Kbit/s dalam mode kecepatan tinggi.
Interupsi adalah kondisi yang mengharuskan mikrokontroler menghentikan
sementara eksekusi program utama dan mengeksekusi rutin interrupt / Interrupt Service
Routine (ISR), setelah melaksanakan ISR, secara lengkap, maka mikrokontroler akan
Two-wire Serial Interface (TWI) atau secara umum dapat disebut I2C (
Inter-Integrated Circuit), adalah protokol yang memperbolehkan system designer untuk
menghubungkan hingga 128 devices berbeda menggunakan hanya TWI bi-directional bus
lines, satu untuk clock (SCL) dan satu lagi untuk data (SDA). Satu-satunya external
hardware yang dibutuhkan untuk mengimplementasikan bus-nya adalah sebuah pull-up
resistor untuk setiap jalur bus TWI.
Semua device yang terhubung ke bus memiliki alamatnya sendiri, dan mekanisme
untuk memecahkan permasalahan bus terdapat pada protokol TWI. Jenis komunikasi
yang dilakukan antar peralatan dengan menggunakan protokol TW mempunyai sifat
serial synchronous half duplex bi-directional, dimana data yang ditransmisikan dan
diterima hanya melalui satu jalur SDA line (bersifat serial), setiap penggunaan jalur data
bergantian antar perangkat (bersifat half duplex) dan data dapat ditransmisikan dari dan
ke sebuah perangkat (bersifat bi-directional).
2.8. LCD (Liquid Crystal Display)
LCD (Liquid Crystal Display) adalah modul penampil yang banyak
digunakan karena tampilannya menarik. LCD yang umum, ada yang panjangnya
hingga 40 karakter (2 x 40 dan 4 x 40), menggunakan DDRAM (Display Data
Random Access Memory) untuk mengatur tempat penyimpanan karakter tersebut.
Kegunaan LCD banyak sekali dalam perancangan suatu sistem dengan
menggunakan mikrokontroler. LCD dapat berfungsi untuk menampilkan suatu
nilai hasil sensor, menampilkan teks, atau menampilkan menu pada aplikasi
mikrokontroler.
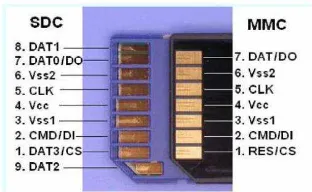
2.9. Multi Media Card (MMC) atau Secure Digital Card (SD Card)
MMC atau SD Card merupakan media penyimpanan data yang biasa
digunakan pada portable device. SD Card merupakan pengembangan dari MMC.
Tidak banyak perbedaan antara SD Card dengan MMC, di antaranya adalah:
1. Ukuran SD Card lebih tebal dari MMC
2. SD Card memiliki switch untuk write protection, sedangkan MMC tidak
3. SD Card memiliki 9 pin, sedangkan MMC memiliki 7 pin
4. SD Card memiliki 3 mode transfer data, yaitu mode SD, mode MMC, dan
mode SPI. Sedangkan MMC hanya memiliki 2 mode transfer, yaitu mode
MMC dan SPI
5. Kecepatan maksimum transfer data SD Card adalah 25Mbit/s, lebih cepat
dari MMC yang memiliki kecepatan maksimum 20Mbit/s dengan mode
komunikasi yang sama yaitu mode SPI dan MMC. Sehingga pada mode
SD kecepatan transfer data maksimum pada SD Card dapat mencapai
100Mbit/s.
BAB 3
METODOLOGI PENELITIAN
3.1. Perancangan Sistem
Pada bab ini akan dibahas perancangan sistem hardware maupun program dari
sistem yang akan dibuat. Secara garis besar, skematik rancangan ini dapat dilihat
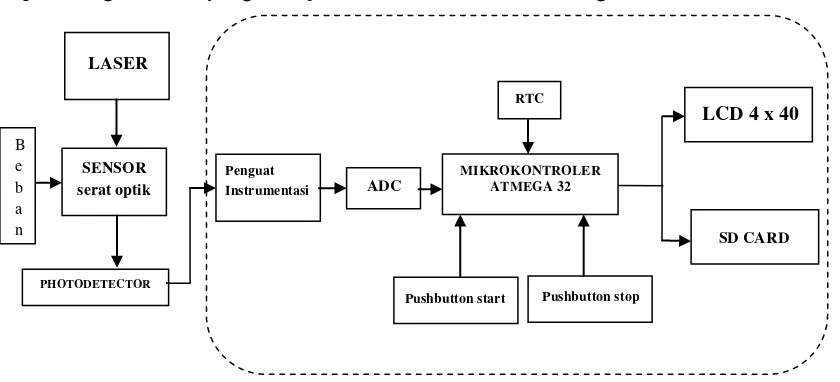
pada diagram blok yang ditunjukkan oleh Gambar 3.1. sebagai berikut :
Gambar 3.1. Blok Skematik Penelitian
Pada penelitian ini digunakan sensor beban menggunakan serat optik
multimode dengan prinsip mikrobending, sumber cahaya menggunakan laser
dioda dengan panjang gelombang 1310 nm yang ditransmisikan ke dalam serat
optik. Cahaya yang bersumber dari laser akan dilewatkan melalui serat optik
sebagai sensor yang telah dirancang oleh P2F-LIPI. Apabila pada sensor diberikan
beban, maka cahaya yang melewati serat optik akan mengalami deformasi yang
mengakibatkan berkurangnya intensitas cahaya pada saat diterima oleh foto
detektor. Pada foto detektor, cahaya diubah ke dalam bentuk sinyal-sinyal listrik.
Sinyal-sinyal listrik ini nantinya akan dikuatkan oleh rangkaian penguat
instrumentasi sebelum masuk ke ADC. Pada ADC sinyal listrik analog akan
dikonversi ke bentuk sinyal-sinyal digital agar dapat diolah oleh mikrokontroler
ATmega32. ATmega32 selaku pengolah utama dari alat penimbang diisi dengan
B
Pushbutton start Pushbutton stop LASER
program. Secara garis besar program tersebut bermaksud untuk menampilkan
hasil pengukuran pada layar LCD dan menyimpan data pada SD CARD.
a. Perancangan tampilan pada LCD
Hasil pengukuran akan di tampilkan pada LCD karakter 4 x 40. LCD
dihubungkan dengan port C pada mikrokontroler. Di mikrokontroler,
diberikan program dalam bentuk bahasa C untuk menampilkan keterangan
apa saja yang diperlukan pada proses pengukuran berlangsung.
Pada baris pertama LCD karakter akan ditampilkan judul “Sensor beban berbasis serat optik”, pada baris kedua ditampilkan keterangan waktu dan tanggal pengukuran, pada baris ketiga ditampilkan keterangan urutan data,
besar tegangan dan tegangan rata-rata, dan pada baris keempat ditampilkan
nilai hasil pengukuran beban.
Gambar 3.2. Perancangan LCD
b. Perancangan ADC
Pada mikrokontroler di berikan program menggunakan bahasa C untuk
membaca nilai ADC yang akan ditampilkan pada LCD. Sebagai tegangan
masukan digunakan power supply 5 Volt DC sebagai sumbernya. Tegangan
masukan akan dikorelasikan dengan besar nilai ADC yang tampil pada LCD.
untuk membantu memvariasikan besar tegangan digunakan potensiometer
dan nilai tegangan diukur menggunakan multimeter.
Gambar 3.4. Perancangan ADC
c. Perancangan RTC
Pada proses pengukuran diperlukan keterangan waktu dan tanggal dari
pengambilan data. Untuk menampilkan keterangan tersebut ditambahkan
rangkaian RTC pada port D mikrokontroler seperti pada gambar berikut. Pada
mikrokontroler diberikan program dalam bahasa C untuk mengontrol waktu
pengambilan data. Keterangan yang akan ditampilkan berupa jam, menit,
Gambar 3.5. Perancangan RTC
d. Perancangan SD CARD
Data – data hasil pengukuran akan disimpan ke dalam SD Card yang disambungkan pada port B mikrokontroler. Pada mikrrokontroler
ditambahkan program menggunakan bahasa C untuk menyimpan seluruh data
– data hasil pengukuran ke dalam memory SD Card. Keterangan – keterangan hasil pengukuran ini dapat digunakan sebagai informasi pengukuran untuk
pengolahan data selanjutnya.
e. Perancangan rangkaian penguat instrumentasi
Untuk memenuhi full scale pada mikrokontroler dengan referensi internal
yaitu 2,5 V, maka dirancang rangkaian penguat instrumentasi yang
dihubungkan pada port A mikrokontroler, tegangan akan dikuatkan dengan
penguatan 10 kali. Hal ini juga diperlukan agar dapat memperoleh
perubahan tegangan yang signifikan pada pengukuran skala desimal pada
LCD. Untuk penguatan 10 kali sesuai dengan rangkaian penguat
instrumentasi pada gambar 3.10, diperlukan Rgain dengan perhitungan
sebagai berikut:
, R1=R2, R3=R4, R5=R6
Rgain = R7 = 1 kΩ
3.2. Sistem kerja sensor
Gambar 3.8. Skema Sensor
Sensor beban berbasis serat optik buatan P2F-LIPI yang menggunakan
prinsip mikrobending, terdiri dari serat optik yang diletakkan di atas lapisan karet,
kemudian ditutupi dengan papan PVC yang telah direkatkan kawat berdiameter
2,4 mm dan panjang 10 cm yang disusun secara periodik dengan jarak antar kawat
0,5 cm. Jika pada sensor diberikan beban seperti Gambar 3.2, maka tekanan dari
beban tersebut akan menyebabkan mikrobending pada serat optik. Mikrobending
mengakibatkan intensitas cahaya yang melewati serat optik dapat berkurang.
Selanjutnya, besar intensitas cahaya yang diteruskan akan diterima kembali oleh
photodetector untuk mengkonversi daya optik menjadi tegangan listrik.
3.3. Pengujian Sensor
Gambar 3.3. menunjukkan rangkaian hardware sistem baca sensor yang
merupakan modul pelengkap pada alat timbang beban dengan pengolah utama
ATmega 32. Cahaya yang bersumber dari laser akan melewati serat optik sebagai
sensor. Apabila diberikan beban di atas sensor, maka cahaya pada serat optik akan
terdeformasi sehingga cahaya yang ditruskan akan masuk ke photodetector yang
kemudian akan diubah menjadi sinyal listrik. Tegangan hasil keluaran
photodetector diamplifikasi dengan penguat instrumentasi dan dikonversi menjadi
digital dengan ADC (Analog to Digital Converter) 10 bit dengan tegangan
referensi internal. Dalam proses pengukuran, push button start digunakan untuk
memulai pengukuran sedangkan push button stop untuk mengakhiri pengukuran.
beban
Selama jalannya pengukuran, LCD akan menampilkan keterangan
tanggal,waktu, tegangan, dan nilai beban yang terukur. Untuk menambahkan
keterangan tanggal dan waktu, dapat ditambahkan rangkaian RTC. Informasi
mengenai data beban yang terukur ditampilkan pada LCD karakter berukuran
4x40. Dalam proses pengukuran yang bersamaan, data hasil pengukuran akan
langsung disimpan pada SD card dengan format teks, guna keperluan identifikasi
selanjutnya.
Gambar 3.9. Rangkaian pada mikrokontroler
3.3.1. Pengujian Validasi Awal
Pengujian validasi awal dilakukan dengan memberikan beban uji 0; 20 kg; 40
kg; 60 kg; 80 kg; dan 100 kg secara berurutan pada sensor. Hasil validasi awal
dapat dievaluasi dan dijadikan acuan untuk merancang rangkaian penguat
3.3.2. Pengujian Rangkaian Penguat Instrumentasi
Dengan penambahan rangkaian penguat instrumentasi, dapat memperbesar range
keluaran dari hasil pengukuran beban. Range data pengukuran yang kecil akan diperbesar
10 kali sehingga hasil pengukuran dapat lebih akurat. Penguat instrumentasi dengan
penguatan 10 kali dapat dilihat pada Gambar 3.4. berikut ini :
Gambar 3.10. Rangkaian Penguat Instrumentasi dengan Penguatan 10 Kali
3.3.3. Pengujian ADC Terhadap Tegangan Keluaran dengan Rangkaian Penguat
Instrumentasi
Tegangan keluaran dari rangkaian penguat instrumentasi selanjutnya akan
diteruskan ke ADC untuk konversi sinyal listrik analog menjadi sinyal-sinyal
digital yang akan diolah pada mikrokontroler ATmega32. Pada perancangan ini,
ADC dibuat free running sehingga setiap masukan ADC selesai dikonversi akan
melakukan konversi masukan selanjutnya secara periodik. Resolusi ADC dapat
dinyatakan dalam bit, misalnya ADC dengan resolusi n-bit memiliki 2n kode
digital yang mungkin dan berarti juga memiliki 2n tingkat undak (step level).
Meskipun demikian, karena undak pertama dan undak terakhir hanya setengah
dari lebar penuh, maka rentang skala-penuh (FSR, full-scale range) dibagi dalam
Resolusi ADC juga bisa dinyatakan dalam satuan Volt, yang merupakan hasil
bagi dari tegangan skala penuh dengan 2n-1 lebar undaknya
(www.en.wikipedia.com). Maka dari pernyataan di atas, jika ADC yang
digunakan memiliki resolusi 10 bit, dan diketahui jangkauan tegangan
menggunakan V referensi internal sebesar 2,5 Volt, maka resolusi ADC dalam
satuan Volt adalah:
Pengujian validasi ADC ini dilakukan dengan membandingkan nilai tegangan
keluaran dari penguat instrumentasi yang masuk ke pengolah mikrokontroler
dengan nilai ADC.
Pada mikrokontroler, terlebih dahulu diprogram untuk menampilkan nilai
ADC pada LCD. Untuk sumber tegangan digunakan power supply dan untuk
memvariasikan besar tegangan menggunakan potensiometer. Pengujian dilakukan
dengan cara mengukur setiap variasi tegangan keluaran dari penguat instrumentasi
menggunakan multimeter dan membandingkan dengan nilai ADC yang tertera
pada layar LCD. Dengan pengujian ini akan diperoleh hasil kalibrasi nilai ADC
dengan tegangan yang dihasilkan. Hasil kalibrasi ini kemudian dimasukkan ke
pengolah mikrokontroler dalam bentuk program.
3.3.4. Pengujian Validasi Beban
Setelah dilakukan pengujian ADC, dilakukan kembali validasi beban dengan beban
uji yang sama yaitu 0; 20 kg; 40 kg; 60 kg; 80 kg; dan 100 kg secara berurutan pada
sensor. Dalam proses ini akan di dapat hasil pengukuran beban sesuai dengan nilai beban
uji yang diberikan pada sensor. Proses validasi beban dapat dilihat seperti Gambar 3.5. di
bawah ini.
3.4. Program
Pemrograman dalam penelitian menggunakan bahasa C, dengan flowchart program
sebagai berikut :
Gambar 3.12. Flowchart Program Pada Mikrokontroler
INISIALISASI
Atmega 32 sebagai pengolah utama dari alat penimbang dimasukkan program
seperti yang tertera pada flowchart pada Gambar 3.6. Secara garis besar program
tersebut bermaksud untuk menampilkan pada layar LCD berupa header dan waktu
pada saat stand by. Apabila terdapat beban di atas sensor setelah jeda beberapa
menit user diminta untuk menekan push button start sehingga alat penimbang
mulai untuk mengukur beban dimulai dari konversi ADC, menghitung rata-rata
data, baru kemudian mengkonversi sinyal yang diterima menjadi beban dalam
satuan kilogram (kg). LCD akan menampilkan secara langsung beban terukur dan
waktu pada saat pengukuran, dan data-data hasil pengukuran akan disimpan ke
dalam SD card. Namun apabila push button stop ditekan maka proses pengukuran
BAB 4
HASIL DAN PEMBAHASAN
4.1. Pengujian Validasi Awal
Keluaran tegangan dari sensor untuk jangkauan pembacaan 0 sampai dengan
100 kg adalah seperti grafik pada Gambar 4.1. Pada jangkauan tersebut sensor
hanya memiliki perbedaan nilai tegangan keluaran sebesar 80 mV. Apabila
tegangan tersebut langsung dibaca dengan mikrokontroler akan digunakan
menyebabkan resolusinya kurang baik, maka sebelum diproses dalam
mikrokontroler tegangan tersebut dikuatkan dengan instrumentasi amplifier dan
dipilih ADC 10 bit dengan referensi internal yang dapat diprogram pada
Atmega32.
Gambar 4.1. Tegangan Keluaran Sensor
4.2. Pengujian Rangkaian Penguat Instrumentasi
Untuk rangkaian intrumentasi amplifier, dilakukan pengujian tegangan
masukan (Vin) yang berasal dari sumber tegangan uji dan hasil tegangan keluaran
(Vout) dengan voltmeter untuk memastikan penguatan tegangan 10 kali dan
Gambar 4.2 bahwa penguatan mendekati 10 kali dan memiliki korelasi yang
linear.
Gambar 4.2. Tegangan masukan dan tegangan keluaran pada penguat instrumentasi
4.3. Pengujian Validasi ADC
Untuk memperolah konversi tegangan digital dengan tegangan analog,
pengujian dilakukan lagi dengan memberikan tegangan masukan yang sudah
dikuatkan dibandingkan dengan nilai tegangan digital hasil konversi ADC. Hasil
dari konversi tersebut ditunjukkan pada Gambar 4.3 dengan persamaan yang
didapat yaitu, y = 0,0024265x, dimana variabel x merupakan nilai ADC. Dengan
demikian persamaan ini dimasukkan ke dalam program untuk konversi nilai
Gambar 4.3. Pengujian ADC setelah penambahan penguat instrumentasi
4.4. Pengujian Validasi Beban
Setelah diperoleh hasil pengujian yang sesuai, rancangan alat timbang ini
dilakukan validasi dengan masukan dari sensor dan keluaran dibaca dengan
mikrokontroler. Validasi dilakukan dengan memberikan beban uji pada sensor
dari 0 sampai dengan 100 kg. Hasil validasi beban seperti yang ditunjukkan pada
Gambar 4.4 dengan menghasilkan korelasi persamaan polynomial y = 21.94x3 -
176.3x2 + 476.3x -328 antara beban yang diberikan terhadap tegangan keluaran.
Persamaan ini dimasukkan dalam program mikrokontroler untuk mengkonversi
beban yang terbaca menjadi tampilan dengan satuan kilogram (kg).
Gambar 4.4. Grafik Validasi Beban
Rancangan alat timbang sudah diuji dan divalidasi dengan beban, maka
selanjutnya alat ini dilihat performansinya pada saat digunakan untuk mengukur
beban sesungguhnya. Pada Gambar 4.5, Alat timbang digunakan dalam
pengukuran beban. Tampilan LCD ini muncul setelah push button ditekan
sehingga menampilkan header “SENSOR BEBAN BERBASIS FIBER OPTIK”
pada baris 1, tanggal dan waktu saat pengukuran pada baris 2, keterangan
tegangan dan rata-rata tegangan yang terukur dari sensor pada baris 3, dan
Informasi beban dengan satuan kg pada baris 4. Sedangkan push button stop
untuk menakhiri proses pengukuran.
Gambar 4.5. Tampilan Alat Timbang
Sedangkan karakteristik akurasi dari alat timbang ini ditunjukkan pada Tabel
4.1. Karakteristik ini diperoleh dari pengujian alat timbang dengan diberikan
baban uji dari tegangan 0 sampai dengan 100 kg.
Tabel 4.1. Perbandingan beban, beban terukur, dan deviasi.
Beban Real (Kg) Beban terukur (Kg) Deviasi (kg) Deviasi (%)
0 1.96 1,96 ~
20 19.21 0,79 3,95 %
40 32.33 7,67 19,17 %
60 55.09 4,91 8,18 %
80 74.65 5,35 6,68 %
Gambar 4.6. Grafik Perbandingan Beban Sebenarnya dan Beban Terukur
Berdasarkan hasil di atas, dapat dilihat bahwa hasil penimbangan beban
terukur mendekati nilai beban yang sesungguhnya, dengan deviasi kurang dari 10
kg atau rata-rata di bawah 10 %, kecuali pada beban 40 kg. Hal ini dapat
disebabkan oleh mekanisme pada sensor. Selanjutnya, data – data dari hasil
pengukuran tersebut akan disimpan ke dalam SD card pada folder “data” file “tes”
dengan format teks seperti pada Gambar 4.6. Keterangan data – data yang disimpan berupa pengukuran data ke-, waktu pengukuran,besar tegangan, dan
beban yang terukur.
R² = 0.9957
0 20 40 60 80 100 120
0 20 40 60 80 100
B
e
b
an
r
e
al
(
kg)
BAB 5
KESIMPULAN DAN SARAN
5.1. Kesimpulan
Dari penelitian yang telah dilakukan dapat diperoleh kesimpulan :
1. Pada rancangan ini, hasil pengukuran beban dapat diidentifikasi dari konversi
tegangan output menjadi nilai beban dengan menggunakan persamaan hasil
validasi. Tegangan output akan lebih kecil nilainya dibandingkan tegangan
input, hal ini dipengaruhi oleh besar beban yang diberikan pada sensor. Dari
penelitian diperoleh deviasi persen error antara beban terukur dengan beban
sebenarnya dibawah 10 %.
2. Akurasi adalah tingkat kedekatan nilai pengukuran dengan nilai sebenarnya. Hasil pengukuran yang diperoleh bahwa selisih antara nilai beban sebenarnya dan beban
terukur kurang dari 10 kg, dimana hasil pengukuran beban dari 0 sampai 100 kg,
maka alat memiliki nilai akurasi rata-rata di bawah 10 %.
5.2. Saran
Setelah melakukan penelitian, diperoleh beberapa hal yang dapat dijadikan
saran untuk melakukan penelitian lebih lanjut, yaitu :
1. Pada penerapan sensor ini, disarankan untuk tetap menjaga suhu ruangan sumber laser, karena sangat mempengaruhi kestabilan laser
2. Penelitian ini membutuhkan pengembangan lebih lanjut untuk mendapatkan hasil yang maksimal, dan kedepannya diharapkan dapat membuat alat yang lebih kompleks
DAFTAR PUSTAKA
Ayuni, Cetie Rinda. dkk. Deteksi Dini Keretakan Struktur Beton dengan
Menggunakan Fiber Optik Plastik. Fisika FMIPA ITS.Surabaya.
Batenko, Anatoly. Grakovski, A. Kabashkin, I. Petersons, E. Sikerzhicki, Y. 2011.
Weihgt-In-Motion (WIM) Measurements by Fiber Optic Sensor : Problems
and Solutions.Transport and Telecommunication Institute. Volume 12, No 4,
27–33, pp. 27-33.
Bayuwati, Dwi. 2010. Pembuatan Extensometer untuk Deteksi Pergeseran Tanah.
Lembaga Ilmu Pengetahuan Indonesia (LIPI).
Bolton, W. 2006. Sistem Instrumentasi dan Sistem Kontrol. Penerbit Erlangga.
Jakarta : 56.
Fraden, Jacob. 2010. Handbook of Modern Sensors Physics, Design, and
Applicatons. Fourth Edition. Springer. New York.
Hanto, Dwi. Al Kindi, Cindy. Setiono, Andi. Widiyatmoko, B. 2013. Analisa
Pengaruh Mikrobending untuk Aplikasi pada Sensor Beban Berbasis Serat
Optik. Prosiding Seminar Nasional Fisika – IKIP PGRI. Semarang.
Muhtadan. dkk. 2006. Rancang Bangun Alat Penyimpan Data Suhu dengan
Mikrokontroler. Seminar Nasional II SDM Teknologi Nuklir Yogyakarta.
ISSN 1978-0176
Pramono, Nopi Yudi. dkk. 2012. Pengaruh Lekukan Bertekanan pada Serat Optik
Plastik terhadap Pelemahan Intensitas Cahaya. Prosiding Seminar Nasional
Penelitian dan Penerapan MIPA. FMIPA Universitas Negeri Yogyakarta.
Yogyakarta.
sSetiawan, Iwan. 2009. Buku Ajar Sensor dan Transduser. Universitas
Diponegoro. Semarang.
Setiono, Andi. Mulyanto, Imam. Widiyatmoko, B. 2012. Kajian Mikrobending
sebagai Sensor Beban Berbasis Serat Optik Multimode. Group THz -
(PPF-LIPI). Prosiding Pertemuan Ilmiah XXVI HFI Jawa Tengah dan DIY.
Purworejo.
Setiono, Andi. Puranto, P. Widiyatmoko, B. 2010. Pembuatan dan Uji Data
Logger Berbasis Mikrokontroler Atmega32 untuk Monitoring pergeseran
Tanah. Bidang Instrumentasi Fisis dan Optoelektronika Pusat Penelitian
Fisika – Lembaga Ilmu Pengetahuan Indonesia (PPF-LIPI). Jurnal Fisika ISSN 0854-3046. Himpunan Fisika Indonesia Akreditasi: No.
242/Akred-LIPI/P2MBI/05/2010, Vol. 10, No. 2, pp. 83-94.
Siswanto, Oktavianto Utomo. 2005. Analisis Perhitungan Rugi-Rugi pada Serat
Optik. Teknik Elektro Universitas Diponegoro. Semarang.
www.atmel.com
LAMPIRAN A
// DS1307 Real Time Clock functions #include <ds1307.h>
/* now you can include the LCD Functions */ #include <lcd4x40.h>
//variabel global
#define RTC_ADDR 0xD0
char *day[7]={"Senin","Selasa","Rabu","Kamis","Jum'at","Sabtu","Minggu"}; char
*month[12]={"Jan","Feb","Mar","Apr","May","Jun","Jul","Aug","Sep","Oct","N ov","Dec"};
unsigned char hari, tanggal,bulan,tahun,jam,menit,detik;
char text[16];
// External Interrupt 0 service routine
// Place your code here start=1;
stop=0; j=1; }
// External Interrupt 1 service routine
interrupt [EXT_INT1] void ext_int1_isr(void)
lcd_puts("SENSOR BEBAN BERBASIS FIBER OPTIK"); }
#define ADC_VREF_TYPE 0x40
// Read the AD conversion result
unsigned int read_adc(unsigned char adc_input) {
ADMUX=adc_input | (ADC_VREF_TYPE & 0xff);
// Delay needed for the stabilization of the ADC input voltage delay_us(10);
// Start the AD conversion ADCSRA|=0x40;
unsigned int rx_wr_index,rx_rd_index,rx_counter; #endif
// This flag is set on USART Receiver buffer overflow bit rx_buffer_overflow;
// USART Receiver interrupt service routine interrupt [USART_RXC] void usart_rx_isr(void) {
char status,data; status=UCSRA; data=UDR;
if ((status & (FRAMING_ERROR | PARITY_ERROR | DATA_OVERRUN))==0)
{
rx_buffer[rx_wr_index++]=data; #if RX_BUFFER_SIZE == 256
// special case for receiver buffer size=256 if (++rx_counter == 0) rx_buffer_overflow=1; #else
if (rx_wr_index == RX_BUFFER_SIZE) rx_wr_index=0; if (++rx_counter == RX_BUFFER_SIZE)
{
// Get a character from the USART Receiver buffer #define _ALTERNATE_GETCHAR_
#endif
// USART Transmitter interrupt service routine interrupt [USART_TXC] void usart_tx_isr(void)
if (tx_rd_index == TX_BUFFER_SIZE) tx_rd_index=0; #endif
} }
#ifndef _DEBUG_TERMINAL_IO_
// Write a character to the USART Transmitter buffer #define _ALTERNATE_PUTCHAR_
if (tx_counter || ((UCSRA & DATA_REGISTER_EMPTY)==0)) {
tx_buffer[tx_wr_index++]=c; #if TX_BUFFER_SIZE != 256
}
report=f_open(&ftest,filename, FA_OPEN_EXISTING | FA_READ); if (report==FR_NO_PATH)
report=0; unsigned char status_tulis; status_tulis=0;
//reset_filename(); //file_data(); //mk_dir();
//mk_file(); display_status(filename);