ADAPTIF LINGKUNGAN-BIOLOGIK
DALAM RUMAH TANAMAN
TAMRIN
SEKOLAH PASCASARJANA
INSTITUT PERTANIAN BOGOR
Dengan ini saya menyatakan bahwa disertasi Desain dan Pemodelan Sistem Kontrol Adaptif Lingkungan-biologik dalam Rumah Tanaman adalah karya saya sendiri dan belum diajukan dalam bentuk apapun kepada perguruan tinggi manapun. Sumber informasi yang berasal atau dikutip dari karya yang diterbitkan maupun tidak diterbitkan dari penulis lain telah disebutkan dalam teks dan dicantumkan dalam Daftar Pustaka di bagian akhir disertasi ini.
Bogor, Oktober 2005
Tamrin
TAMRIN. Desain dan Pemodelan Sistem Kontrol Adaptif Lingkungan-biologik dalam Rumah Tanaman. Dibimbing oleh KUDANG BORO SEMINAR, HERRY SUHARDIYANTO, dan SOEDODO HARDJOAMIDJOJO.
Ada kecenderungan pengusaha di bidang agro bisnis, terutama di bidang hortikultura, lebih memilih memproduksi komoditas yang spesifik, yaitu yang membutuhkan teknologi dan perlakuan khusus dimana tidak semua orang bisa memproduksinya. Untuk memenuhi kebutuhan itu, perlu teknologi yang dapat melakukan identifikasi antara masukan yang dibutuhkan dengan keluaran yang diinginkan dan mewujudkan hasil identifikasi tersebut, dengan kata lain teknologi yang dapat digunakan untuk kegiatan praktis dan sekaligus riset (fleksibel).
Sehubungan hal di atas, dirancang sistem kontrol adaptif lingkungan-biologik untuk rumah tanaman dalam bentuk perangkat lunak yang juga memadukannya dengan fasilitas pilihan modus kontrol. Identifikasi lingkungan-biologik disini didasarkan pada pemahaman model yang menggambarkan hubungan antara faktor lingkungan optimal dengan produk maksimum tanaman yang dipane n, baik didasarkan pada kualitas, atau kuantitas, atau selera, atau kombinasi diantaranya, tergantung kondisi produk yang diinginkan. Produk tanaman yang dipanen dapat berupa hasil generatif maupun vegetatif.
Penelitian, mencakup desain sistem kontrol adaptif lingkungan-biologik, membangun perangkat lunak dan model lingkungan-biologik (pindah panas), eksperimen dan pengamatan di lapangan (data volume nutrisi yang diberikan, out flow, citra kanopi, diameter batang, suhu udara, kelembaban relatif udara, dan iradiasi matahari), pengolahan data mencakup model tanaman dengan jaringan syaraf tiruan, optimasi lingkungan-biologik dengan algoritma genetika, model lingkungan-biologik dengan pindah panas, optimasi parameter kontrol fazi dan PID dengan algoritma genetika, dan simulasi sistem kontrol adaptif lingkungan-biologik berdasarkan acuan lingkungan optimal dengan menggunakan parameter optimal untuk modus kontrol fazi dan PID.
Prototipe perangkat lunak sistem kontrol adaptif lingkungan-biologik yang dibangun telah dilengkapi dengan fasilitas real time sehingga memungkinkan digunakan untuk kebutuha n akuisisidata dan kontrol dengan fasilitas pilihan modus kontrol fazi, PID, P, PI, dan PD. Selain hal itu, juga telah dilengkapi dengan fasilitas sistem pengolah citra, sistem penentuan acuan optimal, dan sistem penentuan parameter kontrol optimal. Model tanaman untuk memprediksi pertumbuhan tanaman timun mini (rasio kanopi-diameter) pada fase vegetatif dan
out flow adalah berdasarkan larutan nutrisi yang diberikan dan lingkungan-biologik (suhu, kelembaban, dan iradiasi) telah memadai atau baik. Adapun nilai-nilai EI dan APD pada hasil pembelajaran untuk rasio kanopi-diameter adalah 95% dan 1,3%; untuk out flow adalah 99% dan 4,9%, sedangkan pada hasil validasi untuk rasio kanopi-diameter adalah 93% dan 0,62%; untuk out flow
TAMRIN. The Design and Modelling of Biological- Environment Adaptive Control System in Agriculturalhouse. Supervised by KUDANG BORO SEMINAR, HERRY SUHARDIYANTO, and SOEDODO HARDJOAMIDJOJO.
The design of biological-environment adaptive control system in agriculturalhouse was aimed to produce the specific characterictics of crop. The technology that was applied could identify the required input and the expected output. The control system facilitated the alternatives control modes. The identification of biological-environment was based on the understanding of model that described the relation between optimal environment factors and the maximum crop productions. The expected specific characteristics depends on the quality and quantity, or the preferences of consumers, or the combination between those factors. The harvested crop might be the generative yield such as fruits, or vegetative yields (stem, leaves, or roots).
The research included (1) the design of biological-environment control system, (2) the establishment of the software system and biological-environment model using the approach of heat and mass transfer, (3) experiments and observation in the field (data of the added nutrient volume, the amount of out flow, the image of canopy, stem diameter, air temperature, relative air humidity, and solar irradiation), and (4) data processing (plant model using artificial neural network, optimizing environment using genetic algorithm, biological-environment model using heat and mass transfer, optimizing the parameters of fuzzy and PID control, using genetic algorithm, and the simulation of biological-environment control system based on the set point (optimal biological-environment) and optimal parameter of fuzzy and PID control.
The prototype of the biological-environment adaptive control system in agriculturalhouse software was facilitated with the real time condition. Therefore, it was able to be applied for the requirement of acquisition data and control with the alternatives fuzzy control mode, PID, P, PI, and PD. In addition, the system was facilitated with the image processing system, the determination of optimal environment (set point), and optimal parameter of control. The plant model used in the research was baby cucumber.
The results showed that the plant model gave the satisfactory results which indicated by the values of EI (95%) and APD (1.3%) in the training of the canopy -diameter ratio, 99% and 4.9%, respectively in the training of the out flow. The validation of canopy and diameter ratio gave the results of EI (93%) and APD (0.62%), whereas the validation of out flow were 96% and 0.43%, respectively.
© Hak cipta milik Tamrin, tahun 2005 Hak cipta dilindungi
ADAPTIF LINGKUNGAN-BIOLOGIK
DALAM RUMAH TANAMAN
TAMRIN
Disertasi
sebagai salah satu syarat untuk memperoleh gelar Doktor pada
Program Studi Ilmu Keteknikan Pertanian
SEKOLAH PASCASARJANA
INSTITUT PERTANIAN BOGOR
Nama : Tamrin
NIM : 995173
Disetujui Komisi Pembimbing
Dr. Ir. Kudang Boro Seminar, M.Sc. Ketua
Prof. Dr. Ir. Soedodo Hardjoamidjojo, M.Sc. Dr. Ir. Herry Suhardiyanto, M.Sc. Anggota Anggota
Diketahui
Ketua Program Studi Dekan Sekolah Pascasarjana
Ilmu Keteknikan Pertanian
Prof. Dr. Ir. Budi Indra Setiawan, M.Agr. Prof. Dr. Ir. Syafrida Manuwoto, M.Sc.
Bismillaahirrohmaanirrohiim. Penyusunan disertasi yang berjudul Desain Sistem Kontrol Adaptif Lingkungan-biologik dalam Rumah Tanaman ini, mencakup tahapan: desain sistem, membangun perangkat lunak dan model, pengumpulan dan pengolahan data, serta penulisan. Kegiatan tersebut dilaksanakan di Laboratorium Ergotron Departemen Teknik Pertanian FATETA IPB dan di PT Saung Mirwan Bogor, dari April 2002 sampai Agustus 2005.
Penulis menyadari dalam setiap tahapan di atas telah melibatkan banyak pihak. Dengan segala keikhlasan, penulis ucapkan terima kasih kepada Bapak Dr. Ir. H. Kudang Boro Seminar, M.Sc.; Bapak Dr. Ir. H. Herry Suhardiyanto, M.Sc; dan Bapak Prof. Dr. Ir. H. Soedodo Hardjoamidjojo, M.Sc., selaku pembimbing. Disamping itu, penghargaan yang tulus penulis sampaikan kepada semua pihak yang telah sangat membantu baik dalam bentuk diskusi maupun dalam bentuk lainnya.
Ungkapan terima kasih disampaikan juga kepada Ayahanda (alm); Ibunda; saudara-saudara ku; ananda: Ayeshah Augusta Rosdah, Elisha Rosalyn Rosdah dan Muhammad Rajarief Latief; serta istriku: Ir. Filli Pratama, M.Sc.(Hons), PhD, atas segala do’a dan kasih sayang kalian.
Semoga karya ini bermanfaat, Aamiin.
Bogor, Oktober 2005
Penulis dilahirkan di Palembang pada tanggal 18 September 1963 sebagai anak ke-6 dari pasangan Ayahanda A. Latief Saleh (alm) dan Ibunda Rosdah Marzuki. Pendidikan sarjana ditemp uh di Program Studi Teknik Pertanian FP Universitas Sriwijaya dan lulus pada tahun 1988. Pendidikan pascasarjana, magister dan doktoral, ditempuh di Departemen Teknik Pertanian FATETA Institut Pertanian Bogor dan lulus berturut-turut pada tahun 1997 dan tahun 2005.
Penulis bekerja sebagai staf pengajar di Program Studi Teknik Pertanian FP Universitas Sriwijaya sejak tahun 1990 sampai sekarang. Adapun karya ilmiah berupa jurnal/paten/prosiding selama mengikuti pendidikan program doktoral adalah:
1) Tamrin, Seminar KB, Suhardiyanto H, Hardjoamidjojo S. 2005. Model jaringan syaraf tiruan untuk pertumbuhan tanaman ketimun mini (Cucumis sativus L. Var. Marla) pada fase vegetatif. Jurnal Keteknikan Pertanian 19(1):1-10
2) Tamrin, penemu; Universitas Sriwijaya. 5 Nov 2003. Sistem pengontrolan cahaya matahari di rumah kaca dengan sirip-sirip plastik serat (fiber glass). P00200300560.
3) Tamrin. 2003. A study on the plant growth under the controlled micro climate.
Proceedings of The Seminar International on: The Organic Farm and Suistainable Agriculture in The Tropics and Sub Tropics:Science, Tecnology; Palembang, 8-9 Sept 2003. 2: 328-332.
4) Tamrin. 2002. Jaringan neural buatan dan contoh aplikasi pada penentuan model pendugaan kadar air volumetrik dan konduktivitas tanah.
Prosiding Seminar Nasional-Agri Bisnis dan Agri Industri; Palembang, 11-12 Juli 2002. hlm A081-A0815.
5) Tamrin, Hermantoro, Setiawan B I. 2000. Simulasi metode numerik beda hingga untuk menduga penyebaran kadar air volumetrik dan potensial air. Buletin Keteknikan Pertanian 6(4): 37-62.
6) Tamrin, Dedie T. 2000. Rancang bangun sistem kontrol cahaya di rumah kaca. Media Publikasi Ilmu Pertanian Eugenia 6(4): 11-17.
ix
DAFTAR ISI
Halaman
DAFTAR TABEL ... x
DAFTAR GAMBAR ... xi
DAFTAR LAMPIRAN ... xv
PENDAHULUAN ... 1
Latar Belakang ... 1
Tujuan Penelitian ... 8
Manfaat Penelitian ... 8
TINJAUAN PUSTAKA ... 9
Tanaman, Lingkungan, dan Rumah Tanaman ... 9
Jaringan Syaraf Tiruan (JST) ... 12
Algoritma Genetika (AG) ... 17
Sistem Kontrol Umpan Balik ... 20
PENDEKATAN SISTEM KONTROL ADAPTIF LINGKUNGAN-BIOLOGIK ... 24
Konsep Sistem Kontrol Adaptif Lingkungan-biologik ... 24
Struktur Sistem Kontrol Adaptif Lingkungan-biologik ... 27
Komponen Struktur Sistem Kontrol Adaptif Lingkungan-biologik ... 30
METODE PENELITIAN ... 48
Tempat dan Waktu ... 48
Bahan dan Alat ... 48
Prosedur Kerja ... 48
HASIL DAN PEMBAHASAN ... 67
Perangkat Lunak ... 67
Penentuan Acuan Optimal Lingkungan ... 82
Evapotranspirasi Tanaman ... 97
Model Lingk ungan-biologik ... 99
Penentuan Parameter Optimal dan Performansi Kontrol Fazi dan PID ... 104
KESIMPULAN DAN SARAN ... 126
DAFTAR PUSTAKA ... 128
x
Halaman
1 Matriks aturan kontrol fazi ... 41
2 Fungsi dan lokasi penggunaan bahan dan alat ... 49
3 Perlakuan berdasarkan pendekatan teoritis dan pola ... 54
4 Pembandingan parameter algoritma genetika Pc dan Pm ... 106
5 Parameter optimal kontrol fazi dan PID ... 106
xi Halaman
1 Buah ketimun mini ... 6
2 Buah tomat beef ... 6
3 Bunga hias ... 7
4 Rumah tanaman ... 7
5 Struktur jaringan syaraf tiruan dengan banyak lapisan ... 13
6 Tahapan algoritma genetika ... 20
7 Arsitektur struktur sistem kontrol adaptif lingkunga n-biologik dalam rumah tanaman ... 26
8 Struktur sistem identifikasi acuan optimal ... 28
9 Struktur sistem estimasi parameter optimal kontrol melalui simulasi ... 29
10 Struktur sistem kontrol real time ... 30
11 Struktur model tanaman ... 30
12 Struktur model lingkungan ... 31
13 Arsitektur JST respon dinamik ... 32
14 Arsitektur algoritma genetika dengan fungsi fitness JST repon dinamik ... 35
15 Struktur komponen kontrol fazi ... 38
16 Fungsi keanggotaan error (e) ... 39
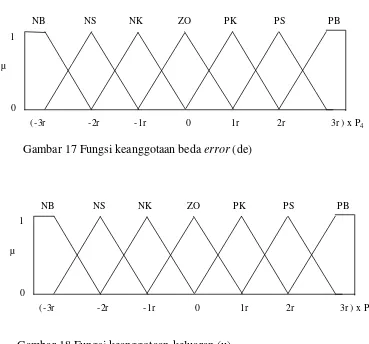
17 Fungsi keanggotaan beda error (de) ... 39
18 Fungsi keanggotaan keluaran (u) ... 40
19 Metode penentuan derajat keanggotaan error dan beda error ... 40
20 Struktur komponen kontrol PID ... 42
21 Pendekatan numerik Euler untuk pemecahan integral ... 42
22 Pendekatan numerik Euler untuk pemecahan diferensial ... 42
23 Skema aplikasi sistem kontrol adaptif lingkungan-biologik ... 46
24 Skema konsep pemodelan suhu dan kelembaban dalam rumah tanaman ... 47
25 Diagram alir prosedur kerja ... 50
26 Skema pendekatan perlakuan teoritis ... 56
27 Perlakuan efektif di lapangan ... 57
xii
30 Tangki larutan nutrisi ... 61
31 Penempatan pengukur iradiasi dan kecepatan angin di lapangan ... 66
32 Alat perekam data suhu bola basah dan kering di lapangan ... 66
33 Diagram menu utama perangkat lunak sistem kontrol adaptif lingkungan-biologik ... 69
34 Tampilan menu utama ... 70
35 Tampilan untuk real time ... 72
36 Tampilan time set up ... 72
37 Tampilan untuk setting masukan dan keluaran hardware ... 73
38 Tampilan untuk setting acuan dan pilihan modus kontrol ... 73
39 Tampilan untuk pengolahan citra ... 77
40 Tampilan operator JST ... 78
41 Tampilan operator algoritma genetika ... 78
42 Tampilan untuk menentukan parameter optimal kontrol ... 79
43 Tampilan simulasi ... 81
44 Citra sebelum dan setelah diproses ... 83
45 Pengukuran perubahan larutan nutrisi yang diberikan ... 84
46 Pengukuran perubahan iklim mikro ... 84
47 Pengukuran perubahan rasio kanopi-diameter ... 85
48 Pengukuran perubahan out flow ... 85
49 Perbandingan nilai rasio kanopi-diameter aktual dengan hasil prediksi pada proses pembelajaran ... 49
50 Perbandingan nilai out flow aktual dengan hasil prediksi pada proses pembelajaran ... 87
51 Perbandingan nilai rasio kanopi-diameter aktual dengan hasil prediksi pada proses validasi ... 87
52 Perbandingan nilai out flow aktual dengan hasil prediksi pada proses validasi ... 87
53 Fluktuasi harian nilai rasio kanopi-diameter aktual dan hasil prediksi pada proses pembelajaran ... 88
xiii
dan hasil prediksi pada proses validasi ... 88
56 Fluktuasi harian nilai out flow aktual dan hasil prediksi pada proses validasi ... 89
57 Hasil simulasi untuk larutan nutrisi dan suhu sama sedangkan kelembaban dan iradiasi berfluktuatif ... 89
58 Bobot model komputasi JST respon dinamik ... 92
59 Kurva evolusi penelusuran fitness dengan pers 32 ... 92
60 Kurva evolusi penelusuran fitness dengan pers 33 ... 92
61 Hasil optimal kurva pers 32 skenario (Pc=0,6; Pm=0,01) ... 94
62 Hasil simulasi model JST dengan masukan hasil optimal kurva pers 32 skenario (Pc=0,6; Pm=0,01) ... 95
63 Hasil penelusuran kurva pers 32 skenario (Pc=0,6; Pm=0,1) ... 95
64 Hasil simulasi model JST dengan masukan hasil penelusuran kurva pers 32 skenario (Pc=0,6; Pm=0,1) ... 95
65 Hasil penelusuran kurva pers 33 skenario (Pc=0,6;Pm=0,01) ... 96
66 Hasil simulasi model JST dengan masukan hasil penelusuran kurva pers 33 skenario (Pc=0,6; Pm=0,01) ... 96
67 Hasil penelusuran kurva pers 33 skenario (Pc=0,6;Pm=0,1) ... 96
68 Hasil simulasi model JST dengan masukan hasil penelusuran kurva pers 33 skenario (Pc=0,6; Pm=0,1) ... 97
69 Pola evapotranspirasi tanaman ketimun mini dan volume nutrisi yang diberikan ... 99
70 Kurva kelembaban relatif, suhu, dan iradiasi rumah tanaman, dan lingkungan ... 101
71 Perbandingan suhu aktual dengan hasil prediksi ... 102
72 Perbandingan kelembaban rela tif aktual dengan hasil prediksi ... 102
73 Kurva fluktuasi kelembaban relatif hitung dan aktual; dan suhu hitung dan aktual ... 103
74 Kurva evolusi penentuan parameter optimal kontrol fazi ... 108
75 Kurva evolusi penentuan parameter optimal kontrol PID ... 109
76 Kurva performansi kontrol fazi pada suhu dan kelembaban dengan parameter hasil kurva evolusi optimum global ... 110
xiv
dengan parameter hasil kurva evolusi optimum lokal ... 112 79 Kurva performansi kontrol PID pada suhu dan kelembaban
dengan parameter hasil kurva evolusi optimum lokal ... 113 80 Kurva transien kontrol fazi dengan gangguan
pada suhu dan kelembaban ... 118 81 Kurva transien kontrol PID dengan gangguan
pada suhu dan kelembaban ... 119 82 Kurva Performansi kontrol fazi pada suhu dan kelembaban
dengan tiga acuan ke atas ... 120 83 Kurva Performansi kontrol fazi pada suhu dan kelembaban
dengan tiga acuan ke bawah ... 121 84 Kurva Performansi kontrol PID pada suhu dan kelembaban
dengan tiga acuan ke atas ... 122 85 Kurva Performansi kontrol PID pada suhu dan kelembaban
dengan tiga acuan ke bawah ... 123 86 Performansi sistem kontrol fazi untuk suhu dan kelembaban
dengan 15 hari acuan optimal ... 124 87 Performansi sistem kontrol PID untuk suhu dan kelembaban
xv
Halaman 1 Potongan memanjang greenhouse tipe single span ... 134 2 Potongan melintang greenhouse tipe single span ... 135 3 Pemecahan persamaan-persamaan pendugaan suhu
Latar Belakang
Hubungan lingkungan dengan tanaman sangat kompleks, karena jumlah kombinasi faktor lingkungan dengan jenis tanaman, dan interaksi secara kontinyu antara semua faktor lingkungan pada semua tingkatan adalah tak terhingga. Dikemukakan ole h Seminar (2000) bahwa kesulitan dalam masalah produksi tanaman baik secara kuantitas maupun kualitas didasarkan pada kenyataan bahwa tanaman adalah agen sistem kehidupan (bio system) yang bersifat kompleks dan dinamik. Hal ini dicirikan dengan sifat-sifat tidak linieritas, pewarisan genetik, peka waktu, dan pengendalian aktivitas fotosintesis yang menjadi perilaku kunci agen sistem bio.
Di Indonesia khususnya, ada kecenderungan pengusaha di bidang agro bisnis, terutama di bidang hortikultura, lebih memilih memproduksi komoditas yang spesifik, yaitu yang membutuhkan teknologi dan perlakuan khusus dimana tidak semua orang bisa memproduksinya. Komoditas ini biasanya dikonsumsi oleh kalangan menengah ke atas. Adapun komoditas tersebut, seperti yang diproduksi di Greenhouse Saung Mirwan adalah ketimun mini (Gambar 1), tomat
beef (Gambar 2), tomat cherri, paprika, bunga hias (Gambar 3), dan lain- lain. Lingkungan berperanan penting untuk pertumbuhan dan perkembangan tanaman dengan kualitas prima. Karakteristik gen tertentu suatu tanaman atau kondisi produk yang diinginkan tidak akan muncul seperti yang diharapkan bila tidak didukung oleh penyediaan kondisi lingkungan yang sesuai.
Secara fisik, faktor lingkungan yang mempengaruhi tanaman dalam rumah tanaman dapat diklasifikasikan menjadi 2 bagian (Esmay dan Dixon 1986), yaitu faktor lingkungan udara sekitar (di bagian atas tanaman) dan faktor lingkungan pada media tumbuh tanaman (di bagian bawah tanaman). Faktor lingkungan udara sekitar meliputi suhu, cahaya, kelembaban, dan CO2, sedangkan faktor lingkungan di media tumbuh, meliputi suhu tanah, kadar air tanah, pH, nutrisi, konduktivitas listrik, evaporasi dan lain- lain (tergantung sistem budidaya).
produksi yang sesuai dengan yang diinginkan, penghematan energi dan ramah lingkungan. Selain itu, bila tersedia sistem kontrol adaptif juga memungkinkan untuk dikembangkan lebih lanjut dengan cara memanipulasi lingkungan yang diinginkan dengan menggunakan sistem kontrol adaptif sehingga dapat menghasilkan produk yang berkualitas dan dengan nilai tambah yang lebih tinggi. Namun demikian, sebelum dilakukan upaya pengontrolan secara optimal terhadap kondisi lingkungan tersebut, perlu ditentukan atau diketahui terlebih dahulu kondisi lingkungan yang optimum dalam memproduksi bagian tanaman (biologik) yang diinginkan, sehingga upaya pengontrolan mencapai tujuan. Misalnya, pemberian air yang ekstrim pada kondisi-kondisi tertentu pada tanaman sayuran mungkin dapat menentukan tingkat kerenyahan sayuran, sehingga berimplikasi pada peningkatan kualitas sayuran tersebut dan pada gilirannya sayuran lokal yang budidayanya relatif lebih mudah dapat ditingkatkan daya saingnya dengan sayuran impor.
Pada umumnya upaya untuk mengendalikan atau mengontrol tanaman menggunakan rumah tanaman (Gambar 4). Adapun yang dimaksud dengan rumah tanaman di sini adalah bangunan atau struktur yang difungsikan untuk produksi tanaman, misalnya greenhouse, plastichouse, rumah bayang, dan lain-lain. Salah satu metode meminimalkan pengaruh lingkungan terhadap tanaman adalah menggunakan teknologi greenhouse. Di dalam greenhouse, faktor lingkungan lebih mungkin dikendalikan untuk mendapatkan kondisi pertumbuhan yang lebih baik. Salah satu alasan penggunaan rumah tanaman adalah memungkinkannya pengendalian dan modifikasi di dalam rumah tanaman. Modifikasi lingkungan dalam rumah tanaman untuk pertumbuhan tanaman dengan tujuan untuk menghasilkan produksi tanaman yang bermutu telah banyak dilakukan oleh peneliti terdahulu (Boulard et al. 2005, Kostov et al. 2002, Lefas dan Santamouris 1984, Nielsen dan Madsen 2005, Schmidt 2005, Straten 2005, Young dan Lees 2005).
genetika dalam rumah tanaman. Korner dan Cha lla (2003) melakukan pendendalian kelembaban untuk pertumbuhan optimal tanaman Chrysanthemum dalam rumah tanaman. Pengendalian suhu udara didalam rumah tanaman juga dilakukan oleh Nishina et al. (2005) dengan menggunakan sistem identifikasi dan menganalisa aplikasi dari sistem identifikasi tersebut. Nilsson dan Nybrant (2005) mengembangkan algoritma berbasis komputer untuk mengendalikan pembungaan tanaman. Adapun tujuannya agar dapat diperoleh waktu pembungaan pada saat yang diinginkan. Pengendalian lingkungan rumah tanaman juga dilakukan dengan menggunakan pengukuran secara on-line terhadap suhu dan transpirasi daun (Schmidt 2005).
Pengendalian lingkungan dalam rumah tanama n banyak dilakukan terhadap tanaman hortikultura memiliki nilai ekonomis tinggi di antaranya selada seperti yang dilakukan oleh Loslovich dan Seginer (2005) yang mengendalikan konsentrasi nutrisi nitrat yang dibutuhkan oleh selada. Koning (2005) melakukan optimasi pertumbuhan tanaman tomat dengan mengendalikan suhu udara dalam rumah kaca.
Bila kondisi lingkungan (iklim) tersedia secara konstan untuk pertumbuhan tanaman maka greenhouse tidak diperlukan. Kenyataannya, hanya sedikit tempat atau daerah yang iklimnya mendukung lingkungan untuk pertumbuhan tanaman. Tidak jarang kondisi iklim daerah tertentu, misal temperatur, terlalu tinggi pada satu musim dan terlalu dingin pada musim yang lain. Kondisi iklim di daerah tersebut tidak cocok untuk memproduksi tanaman jenis tertentu sehingga
greenhouse masih diperlukan guna mengontrol atau memodifikasi iklim untuk menyediakan kondisi lingkungan yang lebih sesuai untuk tanaman tersebut.
terbatas pada acuan (setpoint) lingkungan yang ditentukan dari kebiasaan setempat atau literatur.
Identifikasi lingkungan-biologik disini didasarkan pada pemahaman model yang menggambarkan hubungan antara faktor lingkungan dengan produk tanaman yang akan dipanen. Produk tanaman yang dipanen tidak selalu berupa hasil generatif, dapat juga berupa hasil vegetatif yang dilihat dari jumlahnya atau mutunya, atau kedua-duanya. Pemahaman berdasarkan respon produk tanaman yang diinginkan dalam situasi demikian inilah diistilahkan dengan lingkungan-biologik.
Menurut beberapa pakar, paling tidak sampai tahun 1995, secara prinsip masih sangat sulit untuk mengembangkan sensor yang dapat digunakan untuk mengevaluasi performansi tanaman secara langsung (real time). Namun demikian, hal ini terus berkembang dan telah ada upaya untuk mengidentifikasi sistem kontrol lingkungan-biologik, yaitu melalui sistem pengontrolan berbasis respon tanaman (speaking plant approach) yang dikembangkan diantaranya oleh Berckmans (1998); Morimoto dan Hashimoto (1998); dan Subrata et al. (2001).
Namun demikian, sistem kontrol lingkungan-biologik masih jarang dalam bentuk perangkat lunak (software) yang juga memadukannya dengan fasilitas pilihan modus kontrol, terutama di Indonesia. Karena itu masih perlu dikembangkan suatu sistem yang bersifat fleksibel, yaitu menyediakan mekanisme untuk pemilihan modus kontrol dan identifikasi (model) tanaman dan lingkungan secara terintegrasi.
Pada konsep speaking plant yang dikemukakan Hashimoto (1989), kondisi lingkungan optimal (acuan optimal) ditentukan oleh oleh komputer secara on-line. Proses pengambilan keputusan ini memerlukan waktu sedangkan kondisi lingkungan terus berubah (tidak konstan). Bila dikembangkan di Indonesia, khususnya untuk saat ini, maka konsep ini kurang berdaya guna. Hal ini disebabkan kecepatan komputer dan sistem sensor juga belum memadai untuk mendukung proses yang demikian.
Sehubungan dengan hal di atas maka SKALB didesain secara off-line untuk menentukan lingkungan optimal dan parameter kontrol optimal dengan tidak menutup kemungkinan untuk operasi on-line, yang tentunya perlu penyesuaian seperlunya bila memang perangkat keras yang mendukungnya tersedia.
Aplikasi kontrol secara real time dilakukan setelah penentuan acuan optimal dan parameter optimal kontrol. Acuan dalam pengontrolan, selain dapat ditentukan melalui fasilitas yang disediakan, juga dapat didasarkan dari literatur atau pengalaman setempat, sesuai dengan kebutuhan. Fasilitas SKALB dapat digunakan untuk mengontrol kebutuhan penggunaan sarana produksi agar tidak berlebihan, yang pada gilirannya bila tidak dikontrol akan berakibat pada kerugian ekonomi atau lingkungan. Selain itu, juga dapat digunakan untuk manipulasi lingkungan-biologik dalam upaya untuk mendapatkan produk dengan kuantitas, kualitas dan selera sesuai kebutuhan.
Gambar 1 Buah ketimun mini
Gambar 3 Bunga hias
Tujuan Penelitian
Adapun tujuan dalam penelitian ini adalah: 1) mendesain sistem kontrol lingkungan-biologik (acuan optimal dan parameter optimal kontrol) berbasis komputer untuk produksi tanaman pada rumah tanaman dalam bentuk perangkat lunak (software prototype) yang juga memadukannnya dengan fasilitas pilihan modus kontrol, 2) mengimplementasikan perangkat lunak yang dibangun (sebagai salah satu contoh aplikasi), yaitu memprediksi lingkungan optimal (acuan) guna mendapatkan produksi maksimum melalui pendugaan rasio luas kanopi-diameter batang tanaman maksimum dan volume larutan nutrisi yang hilang (out flow) minimum, 3) membangun model lingkungan-biologik dalam rumah tanaman, dalam hal ini suhu dan kelembaban, 4) menentukan parameter optimal kontrol modus fazi, dan PID sekaligus melakukan simulasi pada model lingkungan-biologik yang didapat, dan 5) melakukan simulasi kontrol dengan menggunakan parameter optimal masing- masing modus kontrol pada lingkungan optimal yang dihasilkan.
Manfaat Penelitian
Tanaman, Lingkungan, dan Rumah Tanaman
Faktor lingkungan berperanan sangat penting untuk pertumbuhan dan perkembangan tanaman dengan kualitas prima. Karakteristik gen tertentu suatu tanaman tidak akan muncul seperti yang diharapkan bila tidak didukung oleh penyediaan kondisi lingkungan yang sesuai.
Parameter suhu dan cahaya mempengaruhi banyak reaksi kimia pada tanaman, seperti proses fotosintesa dan respirasi. Tanaman yang ditanam pada malam hari dengan suhu tinggi akan tumbuh lebih lambat dibandingkan bila tanaman tersebut ditanam dengan suhu rendah. Hal ini disebabkan karbohidrat yang terbentuk pada proses fotosintesa lebih banyak digunakan untuk respirasi dari pada untuk pembentukan sel (Esmay dan Dixon 1986).
Salah satu upaya untuk mengendalikan lingkungan untuk kepentingan tanaman digunakan rumah kaca. Menurut Bot (1993), rumah kaca adalah bangunan yang dirancang dengan struktur tertutup tembus cahaya (material transparan) dalam upaya memanipulasi lingkungan untuk produksi tana man.
Energi matahari yang datang berupa gelombang pendek ditransmisikan (dilalukan) melalui material transparan, ada yang terserap oleh tanah dan ada yang terserap oleh tanaman. Energi yang diemisikan (dipantulkan) kembali berupa radiasi gelombang panjang yang tidak dapat dilepas ke udara luar. Hal ini kontribusinya sekitar 20% dari total energi didalam rumah kaca, (Takakura 1991). Faktor utama yang menjadikan rumah kaca menjadi panas adalah udara yang terhambat (stagnan) di dalam rumah kaca dan sedikitnya ventilasi.
dibandingkan udara bebas di luar. Selain itu kecepatan udara di dalam rumah kaca kecil dibandingkan kecepatan udara di luar. Berkurangnya pertukaran udara (ventilasi) mempengaruhi langsung keseimbangan energi, dan massa udara rumah kaca. Kecepatan udara rendah di dalam mempengaruhi pertukaran energi, uap air, dan CO2 antara udara rumah kaca dengan benda didalam rumah kaca (tanaman, permukaan tanah, struktur rumah kaca dan sistem pendinginan).
Kedua adalah mekanisme radiasi. Radiasi gelombang pendek yang datang langsung dari matahari yang terbias oleh langit dan awan berkurang karena intersepsi cahaya oleh komponen opak dan transparan rumah kaca, sedangkan pertukaran radiasi gelombang panjang di luar dan didalam rumah kaca berubah karena sifat-sifat radiatif material penutup.
Gelas yang sebagian transparan untuk radiasi gelombang pendek yang datang dan opak untuk radiasi gelombang panjang yang diemisikan dari dalam, sehingga energi terjebak. Efeknya selain penting untuk menjelaskan peningkatan temperatur di dalam rumah kaca juga diperlukan untuk menjelaskan iklim rumah kaca karena secara langsung mempengaruhi semua keseimbangan energi dan temperatur di dalam rumah kaca.
Penutup rumah kaca dengan koefisien transmisivitas tinggi akan menghasilkan suhu yang lebih tinggi dari pada yang diharapkan karena solar gain. Menurut Esmay dan Dixon (1986), solar gain mengikuti persamaan,
f s s TI A
Q = (1)
dimanaQs adalah Solar gain (watt), T adalah koefisien transmisivitas penutup terhadap radiasi matahari, Is adalah Intensitas solar radiasi terhadap bidang horizontal (watt/m2), dan Af adalah luas lantai rumah kaca (m2).
) t t ( UA
Qc = i− o (2)
dimana: Qc adalah kehilangan panas karena konduksi (watt), U adalah koefisien transmisi panas secara keseluruhan (w/m2 K), A adalah luas permukaan rumah kaca (m2), ti adalah temperatur dalam (oC), dan to adalah temperatur luar (oC).
Kehilangan panas yang terbesar kedua adalah melalui pertukaran udara di dalam dan diluar (panas sensibel dan panas laten). Panas sensibel bergerak karena perbedaan suhu udara yang datang dan yang keluar. Panas laten berpindah sebagai uap air evaporasi dan transpirasi. Menurut Esmay dan Dixon (1986), panas sensibel dapat dihitung dengan persamaan berikut,
) t t ( WCp
Qsa = i− o (3)
dimana: Qsa adalah kehilangan panas sensibel (watt), W adalah aliran massa udara (kj/detik), Cp adalah panas spesifik dari udara kering (kj/kg.K), ti
adalah suhu udara luar (oC), dan to adalah suhu udara dalam (oC).
Salah satu metode untuk menciptakan lingkungan tumbuh tanaman yang terkontrol adalah dengan menggunakan teknologi rumah kaca (Bot 1993). Di dalam rumah kaca, faktor lingkungan dapat lebih mudah dikendalikan untuk mendapatkan kondisi pertumbuhan yang baik.
Jaringan Syaraf Tiruan (JST)
Secara struktur JST teridri dari simpul-simpul yang terhubung oleh pembobot. Simpul-simpul masukan menerima nilai dari variabel- variabel bebas dan dihubungkan melalui satu set pembobot ke satu atau lebih simpul tersembunyi. Simpul- simpul tersembunyi meniru terhubung melalui satu set pembobot terhadap simpul-simpul keluaran yang menghasilkan nilai- nilai perkiraan dari variabel- variabel terikat dari sistem jaringan. Melalui paket pembelajaran, nilai- nilai pembobot jaringan dimodifikasi sedemikian rupa yang menggunakan suatu algoritma tertentu, misalnya Penjalaran balik.
Metode penjalaran balik telah terbukti sukses dalam proses training JST multi lapisan. Jaringan tidak hanya diberi bantuan bagaimana mengerjakan tugas. informasi tentang error juga dikontrol melalui sistem dan digunakan untuk menjustifikasi hubungan antara lapisan- lapisan sehingga performa nsi jaringan meningkat.
Penjalaran balik adalah suatu algoritma yang umumnya digunakan untuk membelajarkan JST. Bobot jaringan dimodifikasi dengan cara meminimumkan jumlah kuadrat error yang dihitung terhadap semua simpul-simpul keluaran. Algoritma penjalaran balik adalah suatu bentuk penurunan gradien: Gradien jaringan menurun bila terdefinisi dalam cakupan bobot jaringan. Probabilitas bahwa nilai tersebut akan merupakan minimum local akan menurun dengan makin meningkatnnya besar bobot.
Gambar 5 Struktur jaringan syaraf tiruan dengan banyak lapisan
Pada Gambar 5, struktur JST terdiri tiga lapisan yaitu lapisan masukan (input layer), lapisan tersembunyi (hidden layer) dan lapisan keluaran (output layer). Lapisan masukan mempunyai n simpul, lapisan tersembunyi mempunyai
h simpul dan lapisan keluaran mempunyai m simpul. Dimana xi adalah vektor masukan, i=1,2,3…n; vji adalah pembobot antara lapisan masukan dengan lapisan tersembunyi, i=1,2,3…n dan j=1,2,3…h; wkj adalah pembobot antara lapisan tersembunyi dengan lapisan keluaran, k=1,2,3…m; xp adalah data masukan training, p=1,2,3…p; ypj adalah keluaran pada lapisan tersembunyi unit ke- j dengan masukan xp,, zpk adalah keluaran pada lapisan keluaran unit ke-k; tpk adalah target keluaran; dan f adalah fungsi aktivasi.
Algoritma aturan belajar penjalaran balik menurut Patterson (1996) adalah sebagai berikut: pembobot awal pada JST diberi nilai secara acak. Perhitungan nilai aktivasi feedforward dimulai dengan menjumlahkan hasil perkalian masukan xi dengan pembobot vji dan menghasilkan Hj yang merupakan nilai masukan ke
x1
Input layer
Hidden layer
Output layer x2
x3
x4
xn-1
xn
z1
z2
zm I1
I2
Im w kj H1
Hh y1
fungsi aktivasi lapisan tersembunyi. Kemudian keluaran yj pada lapisan tersembunyi unit j merupakan hasil fungsi aktivasi f dengan masukan Hj. Hal ini telah diformulasikan dalam persamaan 4 dan 5.
∑ =
i ji i j v x H
(4)
( )
j j f Hy =
(5)
Nilai keluaran pada lapisan tersembunyi kemudian dikalikan dengan pembobot wkj dan menghasilkan nilai Ik yang merupakan nilai masukan fungsi aktivasi lapisan keluaran. Nilai masukan zk pada lapisan keluaran dihitung dengan menggunakan fungsi aktivasi f dengan masukan Ik. Hal ini telah diformulasikan dalam persamaan 6 dan 7.
∑
=j j kj
k w y
I
(6)
( )
k k f I z =(7) Secara ringkas zk dapat ditulis dalam persamaan berikut:
( )
( )
= = = =∑
∑
∑
∑
j i i ji kj j j kj j j kj kk f I f w y f w f H f w f v x
z
(8) dengan fungsi aktivasi berupa fungsi sigmoid sebagai mana berikut ini:
( )
xe x
f −β
+ =
1 1
(9) turunan pertama fungsi sigmoid tersebut adalah sebagai berikut,
( )
(
)
f( )
x(
f( )
x)
e e x f x x − = + = − − 1 1 2 ' β β β β (10) dimana β adalah gain atau slope fungsi sigmoid. Selanjutnya pelatihan pada JST (pembobotan) dilakukan dengan menimumkan total error untuk semua data melalui koreksi pembobot. Rata-rata total error merupakan merupakan error
keluaran untuk semua pasang data training yang dapat ditulis sebagai berikut,
perubahan pembobot yang disebut Gradient Descent Method. Koreksi pembobot dapat ditulis sebagai persamaan berikut:
(
s)
E W( )
s W + =− ∂ p ∂∆ 1 η / (12)
dimana ? adalah laju pembelajaran (konstanta yang nilainya 0< ? <1).
Persamaan di atas dapat ditulis lebih lengkap untuk setiap pembobot adalah sebai berikut:,
[
hm]
p p p p p w E w E v E v E W
E ∂ = ∂ ∂ ∂ ∂ ∂ ∂ ∂ ∂
∂ / / 11, / 12,...., / 11,..., /
(13) Berdasarkan persamaan 8 dan 10 maka perubahan total error sistem dapat ditulis sebagai berikut
∑
= ∂ ∂ = ∂ ∂ p p p tot W E p W E 1 1 (14) dimana Eadalah sebagai berikut:(
)
∑
= − = m k p k p k z t E 1 2 2 1 (15)dengan demikian koreksi pembobot (weight adjustment) adalah parsial E terhadap pembobot vji dan wkj. Secara ringkas pengkoreksi pembobot antara lapisan keluaran dengan lapisan tersembunyi adalah sebagai berikut,
(
k z) ( )
k j j k kj kj y I f t t y w wE =∆ = = − '
∂ ∂
−η ηδ η
(16) dimana
(
k z) ( )
k k t t f I' − =
δ (17)
dan pengkoreksi pembobot antara lapisan tersembunyi dengan lapisan masukan adalah sebagai berikut,
( )
∑
= = ∆ = ∂ ∂ − k kj k j i i j ji ji w H f x x v v E δ η ηδ η ' (18) dimana,( )
∑
= k kj k jj f H δ w
δ '
(19)
pembobot sekarang. Sehingga pengkoreksi pembobot antara lapisan keluaran dengan lapisan tersembunyi berturut-turut ditulis seperti berikut ini,
( )
w( )
tw E t
w kj
kj
kj ∂ + ∆
∂ − = +
∆ 1 η α
(20)
( )
v( )
tv E t
v ji
ji
ji ∂ + ∆
∂ − = +
∆ 1 η α
(21) dimana a adalah momentum (konstanta 0<a<1).
Proses perhitungan pembobot antara lapisan keluaran dan lapisan tersembunyi dilakukan dengan persamaan berikut:
( )
+1∆ +
= w w t
wkjnew kjold kj
(22) dan pembobot antara lapisan tersembunyi dengan lapisan masukan dilakukan dengan persamaan berikut,
( )
+1∆ +
=v v t
vnewji oldji ji
(23) Keseluruhan proses ini dilakukan pada setiap contoh dan setiap iterasi. Proses pemberian contoh atau pasangan masukan dan keluaran, perhitungan nilai aktifasi dan pembelajaran dengan mengkoreksi pembobot dilakukan terus menerus sampai didapatkan nilai pembobot dengan nilai total error sistem mencapai minimum global.
Penghentian Pelatihan
Pelatihan JST dengan back propagation dilakukan terus menerus sehingga nilai error minimum global tercapai. Penghentian berdasarkan gradien adalah pelatihan dihentikan bila harga error telah mencapai nilai nilai sangat kecil. Akan tetapi gradien yang bernilai kecil tidak selalu berati bahwa JST berada dekat titik minimum, karena semua titik minimum, titik maksimum dan titik belok stasioner mempunyai nilai gradien sama dengan nol. Sehingga kelemahan metode ini adalah terletak pada penghentian pada titik yang mungkin keliru.
Penghentian berdasarkan jumlah kuadrat error adalah dengan
menghentikan pelatihan jika kesalahan telah mencapai nilai dibawah ambang yang telah ditentukan. Metode ini membutuhkan pengetahuan mengenai nilai minimum tersebut.
Penghentian berdasarkan jumlah iterasi, yaitu proses pelatihan dihentikan bila jumlah iterasi telah dilakukan dengan suatu kepercayaan bahwa jumlah iterasi tertentu akan mencapai minimum global.
Validasi silang, suatu metode yang dalam pelatihannya menggunakan suatu set data lain untuk menguji proses pelatihan. Pelatihan dihentikan jika kinerja generalisasi tidak lagi membaik. Metode ini dilakukan dengan membagi pasangan pelatihan menjadi dua kelompok yaitu: himpunan pelatihan dan himpunan validasi.
Algoritma Genetika (AG)
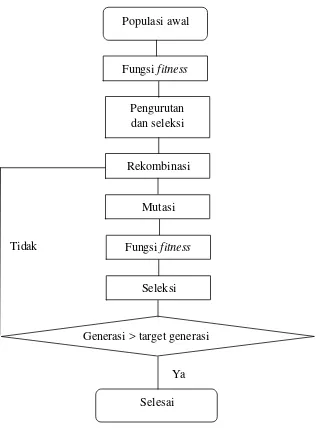
Salah satu teknik optimasi yang makin banyak digunakan akhir-akhir ini adalah algoritma genetika (Gambar 6). Penggunaannya dalam kontrol
greenhouse, diantaranya dikemukakan oleh Ursem et al. (2002). Algoritma genetika menggunakan analog fenomena natural, yaitu adaptasi evolusi biologis, dimana individu- individu terbaik dalam suatu populasi akan mengalami persilangan-persilangan dan mutasi- mutasi dimana yang lebih baik dapat bertahan, sedangkan yang lemah akan punah.
Masing- masing individu, yang dalam hal ini dipersamakan dengan kromosom, mempunyai nilai fitness yang bersesuaian dengan kelayakan solusi permasalahan. Beberapa individu dalam populasi dengan nilai fitness lebih baik berpeluang untuk beriterasi (reproduksi). Dalam prosesnya akan terjadi rekombinasi (cross over) dan mutasi. Setelah mengalami seleksi akan menghasilkan individu-individu baru yang diharapkan merupakan sekumpulan solusi yang paling mungkin, yang pada gilirannya iterasi dihentikan dan dipilih satu solusi yang paling mungkin.
Salah satu kelebihan algoritma genetika adalah relatif sederhana karena kemampuannya untuk belajar dan beradaptasi, yaitu hanya memerlukan informasi tentang struktur kromosom (individu) dan bentuk fungsi fitness dari permasalahan yang dihadapi kemudian akan mencari sendiri solusi terbaik untuk permasalahan yang dihadapi (Yandra dan Hermawan 2000).
Algoritma genetika menggunakan analogi langsung dari sifat natural. Algoritma ini menggunakan populasi dari individu- individu yang masing- masing mewakili penyelesaian yang mungkin untuk problem yang diberikan. Masing-masing individu mempunyai nilai fungsi fitness sesuai dengan kelayakan pada penyelesaian problem. Individu yang sangat fit memperoleh kesempatan untuk rekmobinasi dengan individu- individu dalam populasi. Proses ini menghasilkan individu- individu baru sebagai keturunannya yang memiliki sifat induknya. Individu yang nilai fungsi fitness lemah tidak akan dipilih untuk reproduksi sehingga spesiesnya akan punah.
Selain cross over antar individu, pada evolusi alam juga dikenal mutasi. Yaitu perubahan pada individu yang tidak dipengaruhui oleh individu yang lain. Setelah mengalami cross over jumlah individu bertambah dalam populasi. Untuk menghasilkan generasi berikutnya hanya dipilih individu yang mempunyai nilai
fitness yang terbaik. Agar jumlah populasi sama dengan populasi generasi sebelumnya maka individu dengan nilai fitness rendah dibuang. Proses ini diulang sampai generasi yang diinginkan atau nilai fungsi fitness yang tinggi untuk penyelesaian permasalahan.
GA sehingga membedakan dengan teknik optimasi lainnya: 1) AG bekerja dengan pengkodean dari himpunan solusi permasalahan berdasarkan parameter yang telah ditetapkan, dan bukan parameter itu sendiri, 2) AG melakukan pencarian pada sebuah populasi dari sejumlah individu- individu yang merupakan solusi permasalahan, bukan dari hanya sebuah individu, 3) AG menggunakan informasi fungsi objektif (fitness), sebagai cara untuk mengevaluasi individu yang mempunyai solusi yang terbaik, bukan turunan dari suatu fungsi, dan 4) AG menggunakan aturan-aturan transisi probabilistik, bukan aturan-aturan deterministik.
Variabel-variabel yang digunakan pada algoritma genetika adalah sebagai berikut: 1) Fungsi fitness, yang dimiliki oleh masing- masing individu untuk mene ntukan tingkat kesesuaian individu tersebut dengan kreteria yang ingin dicapai. Fitness ini yang akan dimaksimalkan dengan penerapan algoritma genetika, 2) Populasi jumlah individu yang dilibatkan dalam setiap generasi, 3) Peluang (probabilitas) terjadi rekombinasi pada suatu generasi, 4) Peluang terjadi mutasi pada setiap transfer bit, dan 5) Jumlah generasi yang akan dibentuk yang mene ntukan lama dari penerapan algoritma genetika.
Gambar 6 Tahapan algoritma genetika
Sistem Kontrol Umpan Balik
Menurut terminologi, kontrol umpan balik (feedback control) adalah algoritma kontrol atau sistem dimana keluaran kontrol dihitung berdasarkan hasil keluaran variabel proses. Kontrol adaptif adalah kontrol yang parameternya dapat disesuaikan menurut kondisi ril dan mekanisme untuk menyesuaikan parameter tersebut tersedia. Kontrol optimal adalah kontrol yang mengkombinasikan optimisasi dengan teori kontrol untuk menentukan performansi sistem kontrol sehingga sistem kontrol memberikan respon seefisien mungkin terhadap variabel
Populasi awal
Fungsi fitness
Pengurutan dan seleksi
Rekombinasi
Mutasi
Seleksi
Generasi > target generasi
Selesai Ya
yang berubah menurut waktu atau dengan kata lain mendapatkan performansi kontrol yang dapat meminimalkan fungsi biaya.
Sistem kontrol adaptif lingkungan-biologik (SKALB) adalah sistem perangkat lunak yang menyediakan fasilitas kontrol yang acuannya atau set point (lingkungan optimal) dapat disesuaikan menurut kondisi produk tanaman yang diinginkan, dapat berbasis kuantitas, kualitas, maupun selera dan menyediakan fasilitas pilihan modus kontrol agar variabel proses besarnya sama dengan acuan atau dengan kata lain agar error hasil respon sistem kontrol kecil dan stabil disemua daerah operasi. Disini terdapat dua pemecahan optimasi, yaitu lingkungan optimal untuk dijadikan acuan dan parameter optimal kontrol untuk mendapat performansi yang diinginkan.
Dari penjelasan di atas, terdapat perbedaan antara SKALB dengan kontrol adaptif. Istilah adaptif pada SKALB dikaitkan dengan penyesuaian acuan terhadap produk yang diinginkan sedangkan pada kontrol adaptif dikaitkan dengan penyesuaian parameter kontrol terhadap upaya untuk mempertahankan agar acuan sama dengan variabel proses (self tuning controller). Demikian juga antara SKALB dengan kontrol optimal. Istilah optimal pada SKALB berkenaan dengan dua hal. Pertama, berhubungan dengan pengoptimalan lingkungan yang akan dijadikan sebagai acuan adalam pengontrolan. Kedua, pengoptimalan parameter kontrol untuk mendapatkan performansi respon kontrol yang dikaitkan dengan error minimum. Sedangkan pada kontrol optimal dihubungkan dengan performansi respon kontrol yang menghasilkan fungsi biaya yang minimum. Namun demikian, disamping terdapat perbedaan, antara SKALB dengan kontrol adaptif juga terdapat persamaan, yaitu sama-sama merupakan kontrol umpan balik. Demikian juga antara SKALB dengan kontrol optimal, keduanya berimplikasi kepada keuntungan ekonomis.
lingkungan-biologik), menghitung berapa banyak koreksi yang perlu dilakukan, dan mengeluarkan sinyal koreksi sesuai dengan hasil perhitungan.
Sedangkan langkah atau algoritma menghitung besarnya koreksi dilakukan oleh modus kontrol, seperti fazi dan PID. Masukan modus kontrol adalah error
dan perubahan error dan keluarannya adalah sinyal koreksi atau variabel manipulasi yang dapat diubah-ubah besarnya agar variabel proses atau varabel kontrol besarnya sama dengan acuan. Upaya untuk mempertahankan varibel proses dengan acuannya, masing masing modus kontrol mempunyai parameter-parameter. Parameter-parameter ini harus optimal. Bila tidak, sistem kontrol akan mudah menjadi tidak stabil bila terjadi perubahan acuan atau gangguan. Untuk menentukan parameter optimal kontrol dalam SKALB ini menggunakan operator algoritma genetika.
Kontrol menggunakan logika fazi diklasifikasikan dalam kontrol moderen
(advanced control) sedangkan PID diklasifikasikan dalam kont rol klasik (Haley dan Mulvaney 1995). Namun demikian bukan berarti kontrol moderen selalu lebih baik dari kontrol klasik. Banyak faktor yang mempengaruhinya, antara lain karakteristik dari proses yang akan dikontrol dan kondisi aktuator. Hasil penelitian Shieh et al. (1992) menunjukan bahwa pengontrolan suhu produk pada temperatur tinggi dalam waktu singkat (high-temperature short-time heat exchanger), dengan kontrol PID lebih baik dibandingkan dengan kontrol fazi. Hasil penelitian lainnya, yaitu oleh Morimoto dan Hashimoto (1991) menunjukkan bahwa performansi penerapan modus kontrol fazi dan jaringan syaraf buatan untuk pengontrolan pH pada budidaya hidroponik lebih baik dari kontrol klasik.
Selain penerapannya untuk mengontrol suhu, modus kontrol PID juga pernah diterapkan untuk mengontrol konsentrasi O2 terlarut dan derajat keasaman (Oeggerli et al. 1995). Bagaimanapun modus kontrol PID tidak dapat diterapkan untuk mengontrol semua variabel proses. Akhir-akhir ini, dalam perkembangan kontrol, kontrol PID biasanya dijadikan pembanding (standar), atau juga pengembangan kontrol baru tersebut bertitik-tolak dari kontrol ini, seperti yang dilakukan oleh Chao dan Gates (1996); Chotai dan Young (1991); Chotai et al.
Sistem kontrol adaptif lingkungan-biologik (SKALB) dikembangkan berdasarkan identifikasi acuan optimal dan estimasi parameter optimal kontrol, terdiri dari fasilitas subsistem penentuan acuan optimal, subsistem penentuan parameter optimal kontrol, dan subsistem kontrol real time. Pada gilirannya, hasil penentuan identifikasi acuan optimal dan estimasi parameter optimal kontrol akan dimanfaatkan dalam aplikasi mengontrol lingkungan-biologik secara real time di dalam rumah tanaman.
Pengertian lingkungan-biologik disini ada dua hal, yaitu pertama adalah keterkaitan antara faktor lingkungan sebagai masukan dengan produk tanaman sebagai keluaran, dan kedua adalah berkenaan dengan penempatan sensor untuk mendeteksi masukan maupun kebutuhan sensor untuk keluaran. Hal yang pertama, mengimplikasikan perlu diketahui terlebih dahulu kondisi lingkungan optimal sebelum dilakukan pengontrolan. Untuk menentukan kondisi lingkungan optimal perlu dicari hubungan matematis (model) antara lingkungan dengan produk yang diinginkan, dapat berbasis kuantitas, kualitas, maupun selera.
Konsep Sistem Kontrol Adaptif Lingkungan-biologik
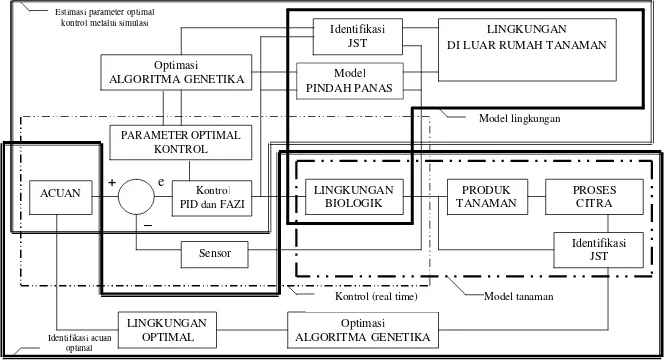
Sistem kontrol adaptif lingkungan-biologik (SKALB) ini didekati berdasarkan identifikasi acuan optimal dan estimasi parameter optimal kontrol (teknik kontrol), terdiri dari fasilitas subsistem penentuan acuan optimal, subsistem penentuan parameter optimal kontrol, dan subsistem kontrol real time. Pada gilirannya, hasil penentuan identifikasi acuan optimal dan estimasi parameter kontrol akan dimanfaatkan dalam aplikasi mengontrol lingkungan-biologik secara real time di dalam rumah tanaman. Adapun arsitektur sistem kontrol adaptif lingkungan-biologik dapat dilihat pada Gambar 7.
Pengertian lingkungan-biologik disini ada dua hal, yaitu pertama adalah keterkaitan antara faktor lingkungan sebagai masukan dengan produk tanaman sebagai keluaran, dan kedua adalah berkenaan dengan penempatan sensor untuk mendeteksi masukan maupun kebutuhan sensor untuk keluaran. Hal yang pertama, mengimplikasikan perlu diketahui terlebih dahulu kondisi lingkungan optimal sebelum dilakukan pengontrolan. Untuk menentukan kondisi lingkungan optimal perlu dicari hubungan matematis (model) antara lingkunga n dengan produk yang diinginkan, dapat berbasis kuantitas, kualitas, maupun selera.
Pengertian lingkungan-biologik yang kedua adalah penempatan sensor masukan disekitar kanopi untuk mendeteksi lingkungan di sekitar tanaman berikut faktor- faktor fisika, kimia dan biologi yang mempengaruhinya sebagai hasil interaksi antara lingkungan dengan tanaman itu sendiri melalui proses fotosintesis, respirasi, dan transpirasi. Hal ini dianggap representasi dari rata-rata kondisi yang ingin dikontrol guna menghasilkan produk panen yang diinginkan.
atau dengan tidak dirusak. Hal ini memungkinkan untuk memilih properti produk apa yang menjadi target, dan keluwesan ini menjadikan SKALB lebih aplikatif.
Pada konsep speaking plant yang dikemukakan Hashimoto (1989), kondisi lingkungan optimal (acuan optimal) ditentukan oleh komputer secara on-line.
Proses pengambilan keputusan ini memerlukan waktu sedangkan kondisi lingkungan terus berubah (tidak konstan). Bila dikembangkan di Indonesia, khususnya untuk saat ini, maka konsep ini kurang berdaya guna. Karena kecepatan komputer dan sistem sensor juga belum memadai untuk mendukung proses yang demikian.
Sehubungan hal di atas, maka SKALB didesain secara off-line untuk menentukan lingkungan optimal dan parameter kontrol optimal dengan tidak menutup kemungkinan untuk operasi on-line, yang tentunya perlu penyesuaian seperlunya bila memang perangkat keras yang mendukungnya tersedia.
Aplikasi kontrol adaptif secara real time (Gambar 10) dilakukan setelah penentuan acuan optimal dan parameter optimal kontrol. Acuan selain dapat ditentukan melalui fasilitas yang disediakan juga dapat didasarkan dari literatur atau pengalaman setempat, sesuai dengan kebutuhan. Fasilitas sistem kontrol optimal lingkungan-biologik dapat digunakan untuk mengontrol kebutuhan penggunaan sarana produksi agar tidak berlebihan, yang pada gilirannya bila tidak dikontrol akan berakibat pada kerugian ekonomi atau lingkungan. Selain itu, juga dapat digunakan untuk mamanipulasi lingkungan-biologik dalam upaya mendapatkan produk dengan kuantitas, kualitas dan selera yang diharapkan.
Perangkat lunak sistem kontrol optimal lingkungan-biologik yang dikembangkan ini dapat digunakan mendukung usaha agribisnis yang lebih memilih teknologi spesifik dalam memproduksi komoditas pertanian dengan kualitas prima di dalam rumah tanaman, khususnya tanaman hortikultura.
Aplikasi real time SKALB dirancang untuk mengakomodasi interface card PCL 812 PG. Selain untuk pengontrolan juga dapat digunakan untuk akuisisi data. Data dapat ditampilkan secara langsung melalui layar maupun direkam. Data yang direkam dapat diekspor ke program umum, seperti excel dan
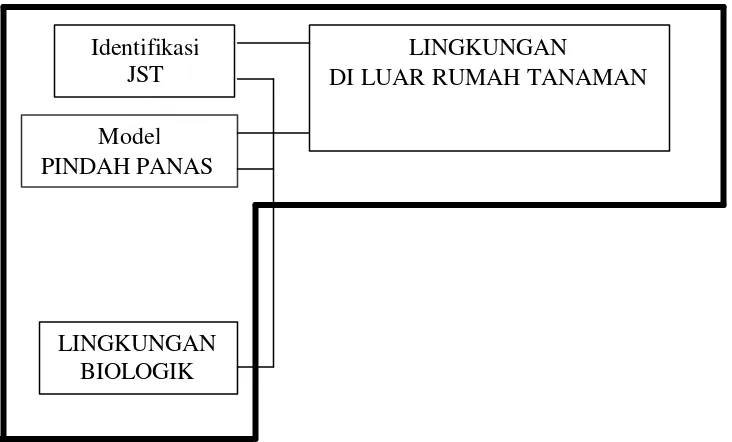
Gambar 7 Arsitektur struktur sistem kontrol adaptif lingkungan-biologik dalam rumah tanaman.
Model tanaman Model lingkungan
e
_
+
Kontrol PID dan FAZI PARAMETER OPTIMAL
KONTROL Optimasi
ALGORITMA GENETIKA Model
PINDAH PANAS
ACUAN LINGKUNGAN
BIOLOGIK
PRODUK TANAMAN
Identifikasi JST
LINGKUNGAN OPTIMAL
PROSES CITRA
Optimasi
ALGORITMA GENETIKA Sensor
Kontrol (real time)
LINGKUNGAN
DI LUAR RUMAH TANAMAN Identifikasi
JST Estimasi parameter optimal
kontrol melalui simulasi
Struktur Sistem Kontrol Adaptif Lingkungan-biologik
Acuan optimal diperoleh dari parameter lingkungan optimal yang didasarkan pada hasil maksimal produk ya ng dipanen baik secara kualitas, kuantitas, maupun selera, tergantung kondisi produk yang diinginkan. Kondisi lingkungan optimal tidak selalu berarti lingkungan diharapkan meningkatkan pertumbuhan tanaman. Kadang-kadang cekaman (stress) lingkungan dapat menghambat pertumbuhan tetapi meningkatkan kualitas, seperti perlakuan cekaman air terhadap tanaman sayuran yang dapat meningkatkan kerenyahan, hal ini termasuk kondisi optimal yang dikaitkan dengan peningkatan kualitas.
Perlakuan lingkungan dapat mempengaruhi rasa pada nenas, bau pada tembakau, dan lain- lain. Disamping itu, tanaman juga mempunyai daya adaptasi terhadap perubahan kondisi lingkungan. Jadi kondisi lingkungan optimal dapat berbeda-beda, tergantung untuk kebutuhan apa lingkunga n itu dimanipulasi.
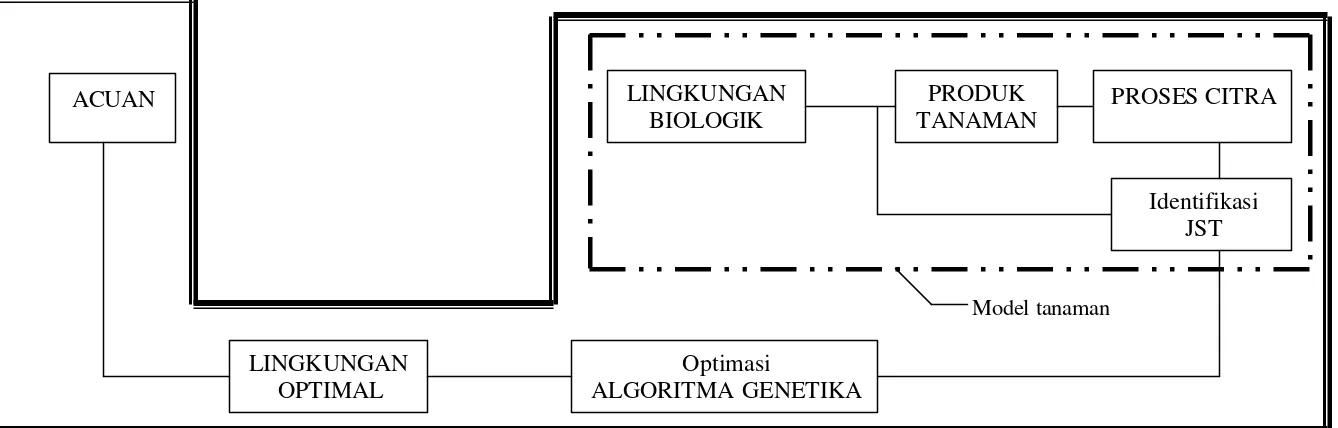
Gambar 8 Struktur sistem identifikasi acuan optimal
Model tanaman
ACUAN LINGKUNGAN
BIOLOGIK
PRODUK TANAMAN
Identifikasi JST
LINGKUNGAN OPTIMAL
PROSES CITRA
Optimasi
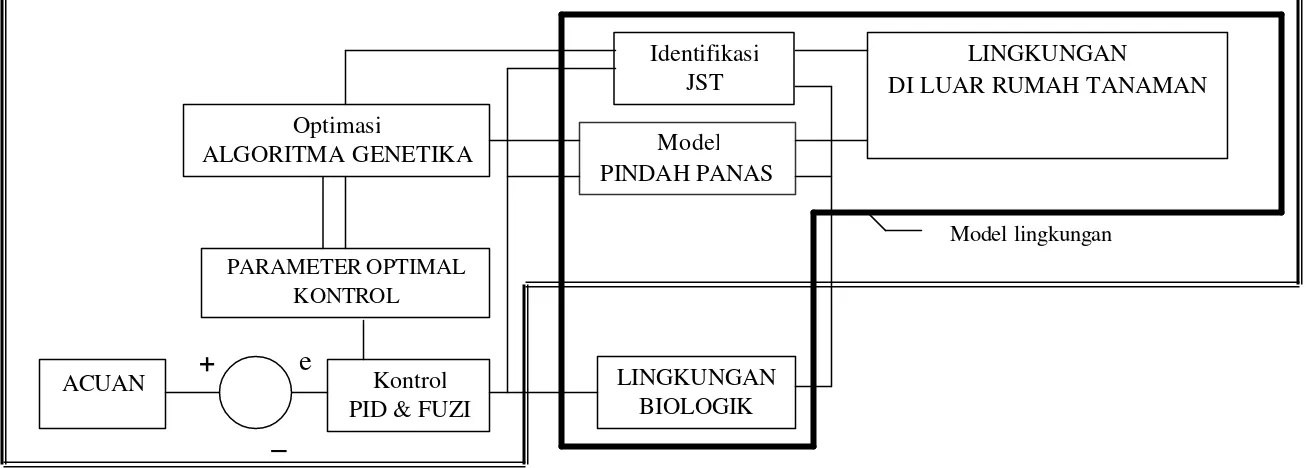
Gambar 9 Struktur sistem estimasi parameter optimal kontrol melalui simulasi
Model lingkungan
e
+
_
+
Kontrol PID & FUZI PARAMETER OPTIMAL
KONTROL Optimasi
ALGORITMA GENETIKA Model
PINDAH PANAS
ACUAN LINGKUNGAN
BIOLOGIK
LINGKUNGAN
DI LUAR RUMAH TANAMAN Identifikasi
Gambar 10 Struktur sistem kontrol real time
Gambar 11 Struktur model tanaman
Komponen Struktur Sistem Kontrol Adaptif Lingkungan-biologik Sistem kontrol adaptif lingkungan-biologik terdiri dari komponen-komponen berikut, yaitu operator identifikasi jaringan syaraf tiruan (JST), operator optimasi algoritma genetika (AG), kontrol fazi, kontrol PID, pengolah citra dan model pindah panas dan massa.
Jaringan Syaraf Tiruan
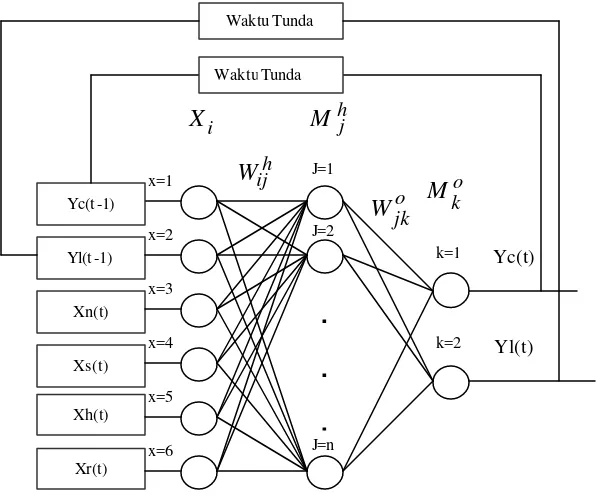
Adapun algoritma komponen JST penjalaran balik (Gambar 13) adalah pertama-tama memberikan vektor masukan X=(1,2, …6)T. Kemudian secara berturut-turut menghitung: masukan total dari setiap simpul pada lapisan tersembunyi (pers 24), keluaran dari setiap simpul pada lapisan tersembunyi (pers 25), masukan total dari setiap simpul pada lapisan keluaran (pers 26),
e
+
_
+
Kontrol
PID danFAZI
PARAMETER OPTIMAL KONTROL
ACUAN LINGKUNGAN
BIOLOGIK
Sensor
LINGKUNGAN BIOLOGIK
PRODUK TANAMAN
Gambar 12 Struktur model lingkungan
keluaran dari setiap simpul pada lapisan keluaran (pers 27), error dari setiap simpul pada lapisan keluaran (pers 28), error dari setiap simpul pada lapisan tersembunyi (pers 29), bobot pada lapisan tersembunyi (pers 30), dan mengubah harga bobot pada lapisan keluaran (pers 31).
Adapun persamaan-persamaan yang dimaksud adalah sebagai berikut,
X W M i n 1 i h ij h
j = ∑
= (24)
)
M ( f
Mhj = hj hj (25)
M W
M hj
n 1 j o jk o
k = ∑
= (26)
( )
o k o ok f M
M = (27)
M Y
dok = k− ok (28)
) W ) M Y )( M (
d ok ojk
2 1 k k h j h
j = ∑ −
= (29)
X
d
?
(t)
W
1)
(t
W
ijo+
=
oij+
hj i (30)X d ? (t) W 1) (t
Wojk + = ojk + ok hj (31)
Model PINDAH PANAS
LINGKUNGAN BIOLOGIK
LINGKUNGAN
DI LUAR RUMAH TANAMAN Identifikasi
Gambar 13 Arsitektur JST respon dinamik
Algoritma Genetika
Komponen algoritma genetika tiruan (Gambar 14) dicirikan dengan kodefikasi kumpulan solusi acak yang disebut populasi. Setiap individu (kromosom) dalam populasi merupakan calon solusi. Individu- individu ini kemudian berevolusi melalui beberapa iterasi atau sering disebut generasi. Pada setiap iterasi, individu dievaluasi menggunakan fungsi fitness. Individu yang nilai
fitness lebih tinggi akan terus dipertahankan dan akan mengalami rekombinasi dan mutasi.
Hasil dari rekombinasi dan mutasi adalah individu- individu baru yang mewarisi sifat solusi dari iterasi sebelumnya. Rekombinasi antara individu yang nilai fitness lebih baik diharapkan menghasilkan individu yang nilai fitnessnya lebih baik pula. Setelah beberapa iterasi algoritma ini akan menghasilkan individu terbaik yang diharapkan merupakan solusi optimal dari permasalahan yang dihadapi.
Proses-proses dalam algoritma genetika tiruan, seperti pada proses kodefikasi, rekombinasi, mutasi dan evaluasi mempunyai banyak metode, dan kini semakin berkembang. Algoritma ini biasanya dibangun dalam bentuk perangkat
Yl(t) x=6 . x=5 . x=4 . x=3 . x=2 . x=1 . k=2 . k=1 . . J=n . J=2
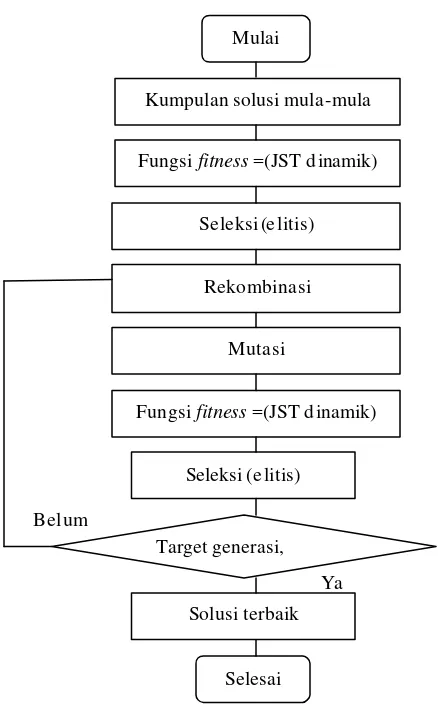
lunak (komputasi) dan pada aplikasinya menggunakan parameter-parameter ukuran populasi, probabilitas rekombinasi (Pc), probabilitas mutasi (Pm) dan banyaknya iterasi. Kesemuanya ditujukan untuk menghasilkan iterasi yang konvergen dan menghindari optimum lokal. Adapun algoritma genetika dengan JST dina mik dapat dilihat pada Gambar 14.
Kumpulan Solusi Mula-mula. Sekumpulan solusi yang dipresentasikan oleh populasi individu dibangkitkan secara acak dalam bentuk string biner. Setiap individu, untuk kebutuhan ini, memberikan informasi 4 variabel, larutan nutrisi yang diberikan, suhu, kelembaban dan iradiasi. Panjang string biner adalah 4xn, dimana n merupakan jumlah gen tiap variabel, pada implementasi ini n=8. Nilai dalam biner ini kemudian dikonversi ke desimal dan dipetakan kedalam nilai minimum dan maksimum setiap variabel. Nilai hasil pemetaan setiap variabel digunakan untuk menghitung nilai fitness total dari model jaringan syaraf tiruan yang telah dikembangkan sebelumnya. Nilai varibel minimum dan maksimum diintroduksi dari hasil pengukuran percobaan lapang.
Fungsi Fitness. Evaluasi yang menggunakan fungsi fitness pada prinsipnya membandingkan solusi-solusi (individu-individu) yang tersedia. Pada penelitian ini dicobakan dua fungsi fitness sebagai berikut,
( )
( )
+ + ∑ = c t l Y 1 t n i c YF1 α β (32)
∑ =∑ + + = n i n i l c l c 2 c ) t ( Y ) t ( Y c ) t ( Y l * ) t ( Y F β α β
α (33)
dimana F1 adalah fungsi fitness 1, F2 adalah fungsi fitness 2, αdanβ, adalah koefisien untuk Yc(t) adalah rasio luas diameter batang (rasio kanopi-diameter) pada saat t (cm2/cm), Yl(t) adalah outflow (nutrisi yang hilang) pada saat t (ml), c adalah konstanta, i adalah data ke-i, dan n adalah data ke-n.
merupakan faktor pembatas atau pengendali dari faktor rasio kanopi-diameter. Konstanta c sebagai antisipasi untuk menghindari variabel Yl(t) sama dengan nol, untuk mengakomodasi keperluan tersebut tetapi juga diharapkan nilai c ini tidak berpengaruh signifikan, maka ditentukan nilai c adalah 10-6. Fungsi tujuan yang digunakan adalah jaringan syaraf tiruan (JST) respon dinamik.
Seleksi dan Urutan Data. Seleksi didasarkan pada parameter ukuran populasi (jumlah solusi) mula- mula, artinya jumlah solusi dipertahankan tetap. Banyaknya penambahan solusi sabagai hasil dari rekombinasi, banyaknya tergantung nilai parameter ukuran populasi dan probalitas rekombinasi (Pc), ditiadakan.
Adapun prosesnya adalah dengan cara mengabungkan terlebih dahulu seluruh individu sebelumnya dengan individu hasil rekombinasi, kemudian diurutkan sesuai dengan nilai fitness dan diambil sejumlah yang terbaik sesuai dengan parameter ukuran populasi mula-mula. Nilai fitness disusun berurut, yang disimpan dalam array 1 sedangkan data populasi (kumpulan solusi) disimpan dalam string array 2. Series data didasarkan pada perubahan nilai fitness yang disimpan di array 1 sedangkan string solusi pada array 2 hanya menyesuaikan. Dengan cara demikian urutan nilai fitness akan bersesuaian dengan urutan solusi.
Mutasi. Mutasi terjadi pada level gen dan dilakukan secara acak dengan cara membangkitkan bilangan random. Bilangan random dibangkitkan sebanyak jumlah gen pada populasi. Bila bilangan random untuk gen pada solusi tersebut lebih kecil dibandingkan dengan parameter probabilitas mutasi (Pm) maka gen itu akan mengalami mutasi, yaitu string 0 akan berubah menjadi 1 atau sebaliknya. Jumlah gen yang mengalami mutasi didasarkan pada. parameter Pm. Misalnya nilai Pm adalah 0,01, maka diharapkan 1% dari populasi akan mengalami mutasi, yaitu 8 dari 800 gen. Jumlah 800 gen merupakan hasil dari asumsi jumlah populasi adalah 25 solusi, masing solusi terdiri 4 variabel, dan masing-masing variabel mempunyai panjang 8 gen.
Gambar 14 Arsitektur algoritma genetika dengan fungsi fitness JST respon dinamik
Ya Belum
Mulai
Selesai
Kumpulan solusi mula-mula
Fungsi fitness =(JST d inamik)
Seleksi (e litis)
Rekombinasi
Mutasi
Fungsi fitness =(JST d inamik)
Seleksi (e litis)
Iterasi. Iterasi adalah proses pengulangan pada tahap rekombinasi, mutasi, evaluasi (penghitungan nilai fitness, dalam hal ini menggunakan bobot JST respon dinamik), dan seleksi. Penentuan banyaknya iterasi memperhatikan kemungkinan terjebak pada maksimum lokal, artinya kalaupun hasil iterasi konvergen tetapi terkondisi pada optimum lokal tujuan penyelesaian optimasi dengan algoritma genetika tidak akan tercapai.
Kontrol Fazi
Teknik logika fazi telah banyak diaplikasikan dalam sistem kont rol. Antara lain, aplikasi pada pengontrolan posisi (Rohmanuddin 1994) dan aplikasi pada pengendalian suhu (Saptomo 1995).
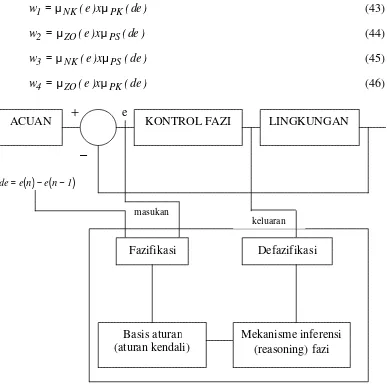
Struktur komponen kontrol fazi dapat dilihat pada Gambar 15. Adapun tahapannya secara ringkas adalah: 1) menghitung error dan beda error, 2) fazifikasi, 3) menentukan aturan kontrol (matrik keputusan) dan menghitung nilai maksimum, dan 4) defazifikasi.
Pertama-tama dilakukan fazifikasi terhadap error (e) dan beda error (de) yang didapat dari selisih antara acuan dengan kondisi aktual. Beda error
merupakan selisih antara error pada saat waktu t(e(t)) dengan error pada saat waktu t (e(t - ∆t)). Secara matematik error dan beda error dinyatakan dalam persamaan berikut, ) t ( T ) t ( T ) t (
e = ac − ak (34)
t ) t t ( e ) t ( e dt de ∆ ∆ − −
= (35
bila ∆t=1, dan pers 34 disubtitusikan ke pers 35, maka persamaan menjadi,
) 1 t ( e ) t ( e
de = − − (36)
t )) t t ( T ) t t ( T ( )) t ( T ) t ( T ( dt ) t (
de ac ak ac ak
∆ ∆ ∆ − − − − −
= (37)
t ) t ( T ) t t ( T dt ) t (
de ak ak
∆ ∆ − −
Kemudian menentukan himpunan fazi dari kedua masukan kontrol, yaitu
error (e) dan beda error (de), serta keluaran kontrol (u) ke dalam nilai linguistik dan ditentukan derajat keanggotaannya (Gambar 16). Nilai linguistik untuk ketiganya dibuat sama, yaitu NB, NS, NK, ZO, PK, PS dan PB. Fungsi keanggotaan yang digunakan adalah fungsi segitiga. Adapun penentuan derajat keanggotaan adalah mengikuti persamaan berikut,
2