PEMODELAN MATEMATIS HARMONISA TEGANGAN DAN ARUS
YANG DITIMBULKAN OLEH PERSONAL COMPUTER
DENGAN MENGGUNAKAN INTERPOLASI
POLINOMIAL METODE NEWTON
TESIS
OLEH KARTI 117034019/TE
FAKULTAS TEKNIK
UNIVERSITAS SUMATERA UTARA
MEDAN
PEMODELAN MATEMATIS HARMONISA TEGANGAN DAN ARUS
YANG DITIMBULKAN OLEH PERSONAL COMPUTER
DENGAN MENGGUNAKAN INTERPOLASI POLINOMIAL
METODE NEWTON
TESIS
Untuk Memperoleh Gelar Magister Teknik Dalam Program Studi Magister teknik Elektro Pada Fakultas Teknik Universitas Sumatera Utara
OLEH KARTI 117034019/TE
FAKULTAS TEKNIK
UNIVERSITAS SUMATERA UTARA
MEDAN
Judul Penelitian : PEMODELAN MATEMATIS HARMONISA TEGANGAN DAN ARUS YANG DITIMBULKAN OLEH PERSONAL KOMPUTER DENGAN
MENGGUNAKAN INTERPOLASI POLINOMIAL METODE NEWTON.
Nama Mahasiswa : KARTI Nomor Induk Mahasiswa : 117034019
Program Studi : Magister Teknik Elektro
Menyetujui Komisi Pembimbing :
(Prof. Dr. Ir. Usman Baafai) (
Ketua Anggota
Dr. Marwan Ramli, M.Si)
Ketua Program Studi, Dekan,
Tanggal Lulus : 23 Juli 2014 Telah diuji pada
Tanggal : 23 Juli 2014
PANITIA PENGUJI TESIS:
Ketua : Prof. Dr. Ir. Usman Baafai Anggota : 1. Dr. Marwan Ramli, M.Si
ABSTRAK
Metode interpolasi polinomial Newton merupakan metode pengukuran yang digunakan terhadap harmonisa tegangan dan arus untuk memprediksi besaran THD tegangan dan arus yang dihasilkan oleh PC. Pada penelitian ini pengukuran harmonisa arus dan tegangan dibangkitkan oleh 5 buah PC dengan spesifikasi yang berbeda secara berurut. Hal ini bertujuan untuk melihat besarnya persamaan THD arus dan THD tegangan yang dihasilkan apabila terjadi penambahan PC. Dari data pengukuran yang dilakukan dengan menggunakan power Quality Analizer dan metode matematik yang digunakan pada penelitian ini metode interpolasi polinomial .Terbukti secara teoritis nilai THD arus dan tegangan secara perhitungan mendekati nilai hasil pengukuran yaitu pesentase kesalahan untuk harmonisa arus pada PC 1 adalah 0.017 %, PC 2 adalah 1.44 %, PC 3 adalah 0.23 %, PC 4 adalah 49.46 % dan PC 5 adalah 1.207 % . Sedangkan pesentase kesalahan untuk tegangan pada PC 1 adalah 2.57 %, PC 2 adalah 0.431 %, PC 3 adalah 2.608 %, PC 4 adalah 1.506 % dan PC 5 adalah 5.61 %.
ABSTRACT
Newton polynomial interpolation method is a method of measurement used in the harmonisa of voltage and current to predict the amount of THD of the voltage and current produced by PC. In this study, the measurement of current and voltage was generated by 5 PCs with different serial specification. The purpose of this study was to look at the similarity of the amount of THD current and voltage produced if the number of PC is added. Based on the data obtained from the measurement done through power quality analizer and the mathematic method used in this study was polynomial interpolation method. Theoretically it was proven that the value of the THD of current and voltage was mathematically close to the value of the measurement result in which the percentage of error of the harmonisa of current at PC 1 was 0.017%, PC 2 was 1.44%, PC 3 was 0.23%, PC 4 was 49.46 dan PC 5 was 1.207%, while the percentage of error of the harmonisa of voltagea at PC 1 was 2.57%, PC 2 was0.431%, PC 3 was 2.608%, PC 4 was 1.506 dab PC 5 was 56.1%.
KATA PENGANTAR
Alhamdulillah, segala puji dan syukur penulis panjatkan ke hadirat Allah SWT yang telah melimpahkan rahmat dan karunia-Nya. Shalawat dan salam
kepangkuan Nabi Muhammad SAW yang telah membawa umat manusia ke alam yang penuh dengan ilmu pengetahuan dan memperkenalkan indahnya islam.
Alhamdulillah, pada akhirnya penulis telah dapat menyelesaikan tesis ini untuk memenuhi salah satu syarat kurikulum Program Studi Magister Teknik Elektro Fakultas Teknik Universitas Sumatera Utara Medan dengan judul “Pemodelan
Matematis Harmonisa Tegangan dan Arus yang Ditimbulkan Oleh Personal Computer Dengan Menggunakan Interpolasi Polinomial Metode Newton”. Khususnya kepada Suamiku tercinta, Parluhutan Pulungan, S.H., M.Hum beribu terima kasih penulis ucapkan atas doa, cinta, dukungan moril dan materil dan motivasi yang mengalir terus menerus kepada penulis sehingga penulis dapat
menyelesaikan tesis ini. Kepada Anak penulis, Fatimah Rahmah Pulungan penulis ucapkan terima kasih atas doa, kasih sayang, dukungan dan motivasi kepada penulis.
Dan Juga kepada Maharani Putri, S.T., M.T dan Andri Ramadhan, S.T penulis ucapkan terima kasih atas doa, cinta, dan yang selalu membantu serta memberikan semangat dalam proses pembuatan tesis ini.
Kepada rekan-rekan sesama mahasiswa angkatan keempat Tahun Akademik
2011/2012 Program Studi Magister Teknik Elektro Fakultas Teknik Universitas Sumatera Utara Medan, Bapak M. Safril, S.T, penulis ucapkan terima kasih atas bantuan, dukungan, dan kerjasama yang baik selama ini.
Kepada Bapak Prof. Dr. dr. Syahril Pasaribu, DTM&H, M.Sc, (CTM), Sp.A(K) selaku Rektor Universitas Sumatera Utara, Bapak Prof. Dr. Ir. Bustami
Syam, MSME selaku Dekan Fakultas Teknik Universitas Sumatera Utara, Bapak Drs. Hasdari Helmi, MT selaku Sekretaris Program Studi dan seluruh pegawai Magister Teknik Elektro Fakultas Teknik Universitas Sumatera Utara, saya ucapkan terima
kasih yang sebesar-besarnya atas segala bantuan fasilitas yang telah diberikan. Kepada Bapak-Bapak staf pengajar saya ucapkan terima kasih yang sebesar-besarnya
atas bantuan dan kerjasamanya selama perkuliahan.
Penulis telah berusaha semaksimal mungkin dalam menyusun tesis ini, tetapi penulis tetap mengharapkan kritik dan saran yang membangun demi sempurnanya
tesis ini. Hanya kepada Allah SWT penulis mohon ampun dan bermohon maghfirah. Akhirnya penulis juga mengharapkan tesis ini dapat memberikan manfaat bagi para
pembaca dan menjadi sumbangsih bagi dunia pendidikan dan amal di akhirat.
Medan, Februari 2014 Tertanda,
DAFTAR RIWAYAT HIDUP
Saya yang bertanda tangan dibawah ini,
Nama : KARTI
Tempat / Tanggal Lahir : Perdamaian / 15 Juni 1968 Jenis Kelamin : Perempuan
Agama : Islam
Bangsa : Indonesia
Alamat : Jl. Padi Raya Gg. Rambutan No. 06 Pasar V Tembung Kab. Deli Serdang. Sumatera Utara
1. Tamatan SD Negeri Tahun 1983 PENDIDIKAN
2. Tamatan SMP Panca Karsa Tahun 1986 3. Tamatan SMA Jaya Stabat Tahun 1989
4. Tamatan Teknik Elektro Fakultas Teknik UNIVA MEDAN Tahun 2003 5. Tamatan Magister Teknik Elektro Fakultas Teknik USU Tahun 2014
Demikian riwayat hidup ini saya buat dengan sebenarnya untuk dapat dipergunakan
sebagaimana mestinya.
Medan, Oktober 2014
Tertanda,
DAFTAR ISI
Halaman
ABSTRAK ... .. i
ABSTRACT ... ii
KATA PENGANTAR ... iii
DAFTAR RIWAYAT HIDUP ... v
DAFTAR ISI ... vi
DAFTAR GAMBAR ... viii
DAFTAR TABEL ... x
BAB 1 PENDAHULUAN ... 1
1.1. Latar Belakang ... 1
1.2. Perumusan Masalah ... 5
1.3. Batasan Masalah ... 6
1.4. Tujuan ... 6
1.5. Manfaat ... 6
BAB 2 TINJAUAN PUSTAKA ... 7
2.1. Personal Computer (PC) ... 7
2.2. Prinsip Dasar Distorsi Harmonik ... 8
2.3. Distorsi Tegangan dan Distorsi Arus ... 12
2.4. Pengaruh Harmonisa ... 14
2.5. Persamaan Harmonisa ... 18
2.6. Interpolasi ... 20
2.6.1. Teori model matematis polinomial interpolasi metode newton evaluasi dari polinomial ... 23
BAB 3 METODELOGI PENELITIAN ... 26
3.2. Teknik Analisa Data ... 26
3.3. Rancangan Model Penelitian ... 27
3.4. Perhitungan Interpolasi Polinomial Dengan Metode Newton 30
3.4.1. Perhitungan Berdasarkan Data Arus Setiap PC ... 30
3.4.2. Perhitungan Berdasarkan Data Pengukuran Tegangan Setiap PC ... 39
BAB 4 HASIL DAN PEMBAHASAN ... 49
4.1. Umum ... 49
4.2. Hasil Representasi dari Grafik Setiap Orde Harmonisa Arus . 49 4.3. Perbandingan Total Harmonic Distortion (THD) Arus ` Pada Pengukuran dengan Perhitungan ... 53
4.4. Hasil Representasi dari Grafik Setiap Orde Harmonisa Tegangan ... 54
4.5. Perbandingan Total Harmonic Distortion (THD) Tegangan Pada Pengukuran dan Perhitungan ... 58
BAB 5 KESIMPULAN DAN SARAN ... 59
5.1. Kesimpulan ... 59
5.2. Saran ... 59
DAFTAR GAMBAR
Nomor Judul Halaman
2.1. Personal Computer (PC) ... 8
2.2. Distorsi Arus Akibat Beban Non Linier ... 9 2.3. Representasi Deret Fourier dari Suatu Gelombang
Terdistorsi ... 10 2.4. Arus yang Mengalir Melalui Beban ... 14 2.5. Bentuk Gelombang Harmonisa Arus Urutan Nol ... 16
2.6. Interpolasi Polinomial (a). Orde 2, (b). Orde 3, (c). Orde
n+1 ... 23 3.1. Personal Computer (PC) yang Diteliti ... 26 3.2. Pengukuran Harmonisa Tegangan dan Arus yang
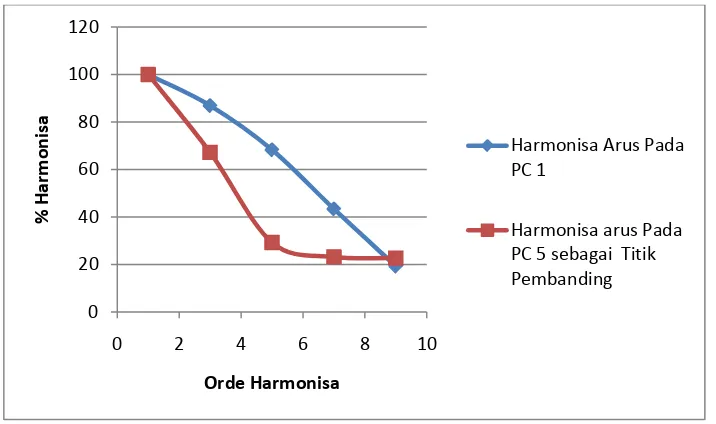
Ditimbulkan Oleh PC ... ……… 27 4.1. Harmonisa Arus Hasil Perhitungan Pada PC 1 dan Titik
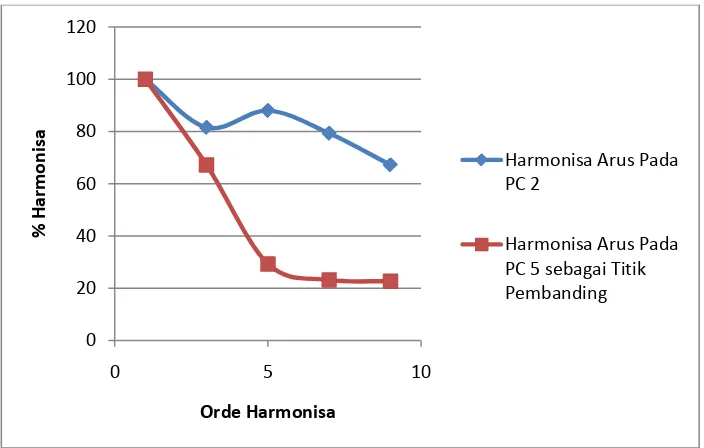
Pembanding PC 5 ... 50 4.2. Harmonisa Arus Hasil Perhitungan Pada PC 2 dan Titik
Pembanding Pada PC 5 ... 51
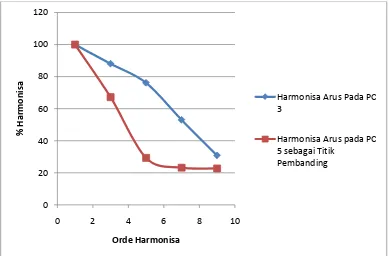
4.3. Harmonisa Arus Hasil Perhitungan Pada PC 3 dan Titik
Pembanding Pada PC 5 ... 52
4.4. Harmonisa Arus Hasil Perhitungan Pada PC 4 dan Titik
Pembanding Pada PC 5 ... 53
4.5. Harmonisa Tegangan Hasil Perhitungan Pada PC 1 dan Titik Pembanding Pada PC 5 ... 55
4.7. Harmonisa Tegangan Hasil Perhitungan Pada PC 3 dan Titik Pembanding Pada PC 5 ... 57 4.8. Harmonisa Tegangan Hasil Perhitungan Pada PC 4 dan Titik
Pembanding Pada PC 5 ... 57
DAFTAR TABEL
Nomor Judul Halaman
1.1. Penelitian Mengenai Harmonisa Pada PC Yang Telah
Dilakukan ……… 4
2.1. Format Perhitungan Koefisien Yang Dihitung Dengan Tangan 25
3.1. Data Spesifikasi Personal Computer (PC) ... 28 3.2. Data Hasil Pengukuran ... 28 3.3. Data Hasil Pengukuran Harmonisa Arus Pada Setiap PC ... 29
3.4. Data Hasil Pengukuran Harmonisa Tegangan Pada Setiap PC . 29 4.1. Perbandingan Harmonisa Arus Hasil Pengukuran Dengan
Perhitungan ... 54 4.2. Perbandingan Harmonisa Tegangan Hasil Pengukuran Dengan
ABSTRAK
Metode interpolasi polinomial Newton merupakan metode pengukuran yang digunakan terhadap harmonisa tegangan dan arus untuk memprediksi besaran THD tegangan dan arus yang dihasilkan oleh PC. Pada penelitian ini pengukuran harmonisa arus dan tegangan dibangkitkan oleh 5 buah PC dengan spesifikasi yang berbeda secara berurut. Hal ini bertujuan untuk melihat besarnya persamaan THD arus dan THD tegangan yang dihasilkan apabila terjadi penambahan PC. Dari data pengukuran yang dilakukan dengan menggunakan power Quality Analizer dan metode matematik yang digunakan pada penelitian ini metode interpolasi polinomial .Terbukti secara teoritis nilai THD arus dan tegangan secara perhitungan mendekati nilai hasil pengukuran yaitu pesentase kesalahan untuk harmonisa arus pada PC 1 adalah 0.017 %, PC 2 adalah 1.44 %, PC 3 adalah 0.23 %, PC 4 adalah 49.46 % dan PC 5 adalah 1.207 % . Sedangkan pesentase kesalahan untuk tegangan pada PC 1 adalah 2.57 %, PC 2 adalah 0.431 %, PC 3 adalah 2.608 %, PC 4 adalah 1.506 % dan PC 5 adalah 5.61 %.
ABSTRACT
Newton polynomial interpolation method is a method of measurement used in the harmonisa of voltage and current to predict the amount of THD of the voltage and current produced by PC. In this study, the measurement of current and voltage was generated by 5 PCs with different serial specification. The purpose of this study was to look at the similarity of the amount of THD current and voltage produced if the number of PC is added. Based on the data obtained from the measurement done through power quality analizer and the mathematic method used in this study was polynomial interpolation method. Theoretically it was proven that the value of the THD of current and voltage was mathematically close to the value of the measurement result in which the percentage of error of the harmonisa of current at PC 1 was 0.017%, PC 2 was 1.44%, PC 3 was 0.23%, PC 4 was 49.46 dan PC 5 was 1.207%, while the percentage of error of the harmonisa of voltagea at PC 1 was 2.57%, PC 2 was0.431%, PC 3 was 2.608%, PC 4 was 1.506 dab PC 5 was 56.1%.
BAB 1 PENDAHULUAN
1.1. Latar Belakang Masalah
Kebutuhan peningkatan produktifitas dalam industri dan diinginkannya suatu proses yang kontinu membutuhkan komponen-komponen elektronika dan komponen
elektronika daya sebagai perangkat pendukung, di mana komponen-komponen tersebut merupakan peralatan-peralatan yang sensitif yang harus disupply oleh tegangan yang diharapkan baik frekuensi maupun besaran tegangan dalam kondisi
konstan.
Kehadiran komponen tersebut membutuhkan penyediaan daya yang
berkualitas tinggi [1][2][3], karena komponen elektronika daya sangat sensitif terhadap gangguan-gangguan elektromagnetik [4]. Adanya gangguan dapat mengakibatkan penurunan kualitas daya sistem tenaga, masalah kualitas daya adalah:
kedip tegangan, flicker, ketidakseimbangan tegangan, pemutusan dan masalah harmonisa. Peralatan-peralatan yang sensitif seperti komputer, rele, Programmable Logic Controller (PLC), penggerak motor listrik dan sebagainya, sangat peka
terhadap perubahan tegangan yang diakibatkan oleh gangguan yang terjadi pada bagian lain pada sistem.
tujuan tersebut, maka gangguan harus dikurangi, karena kegagalan dalam
menyediakan kualitas daya yang tinggi dapat mengakibatkan kegagalan beroperasinya peralatan atau bahkan shutdown pada suatu sistem [5].
Distorsi gelombang (harmonisa) pada sistem saluran tegangan rendah,
arus dan tegangan adalah mempunyai besaran magnituda dan kelipatan frekuensi dari frekuensi fundamental. Sebagai contoh frekuensi fundamental 50 Hz, kemudian
frekwensi harmonisa kedua 100 Hz, frekwensi harmonisa ketiga 150 Hz, dan seterusnya. Bentuk gelombang arus atau tegangan sinus yang murni tidak mempunyai kerusakan dan tidak mengandung urutan komponen harmonisa
sedangkan tidak sinus (non linear) yaitu mengandung komponen harmonisa sehingga total dari harmonisa menyebabkan kerusakan pada gelombang sinusoidal.
Pada sistem saluran tegangan rendah, kebanyakan konsumen memakai beban elektronik yang membangkitkan urutan komponen harmonisa ganjil pada sistem
tegangan satu fasa ke netral (L – N) seperti urutan harmonisa pertama yang dikatakan sebagai fundamental (1), ketiga (3), kelima (5), ketujuh (7), kesembilan (9), dan pada sistem 3 fasa pada tegangan fasa ke fasa (L – L) yaitu urutan fundamental, kelima
(5), ketujuh (7), kesebelas (11) dan seterusnya.
Untuk menentukan nilai distorsi tegangan dan arus sinusoidal yaitu dengan menjumlahkan magnituda urutan komponen tegangan harmonisa atau arus harmonisa
Umumnya distorsi gelombang sinusoidal yang mengalir pada sistem
dinyatakan dalam Total Distorsi Harmonisa (THD) gelombang sinusoidal yang ditimbulkan oleh beban non linear dinyatakan dalam persen. Distorsi gelombang arus dan tegangan sinusoidal dibatasi pada pendistribusian sistem tenaga listrik dari utility
ke konsumen [2].
Untuk mengatasi masalah harmonisa pada sistem saluran tegangan rendah adalah tugas penting para tenaga ahli (engineer) listrik yang sudah lama berkecimpung dalam melakukan penelitian untuk menghilangkan dan
mengurangi efek harmonisa yang ditimbulkan pada sistem [1]. Namun sampai sekarang permasalahan harmonisa tersebut masih perlu dibahas karena dampak yang ditimbulkan sangat mengganggu peralatan listrik seperti
transformator, circuit breaker, rele proteksi, fuse dan lain-lain [3].
Arus harmonisa juga dapat menyebabkan overheating (panas lebih) pada
konduktor netral sistem 3 fasa 4 kawat. Panas konduktor netral ini akibat komponen arus urutan nol (Iao ) pada tiap-tiap fasa mengalir menuju konduktor netral
[4]. Menurut pendapat Wagner et al, bahwa besar penampang konduktor netral
didesain lebih kecil atau sama besar ukuran penampangnya dengan konduktor fasa
sehingga penambahan panas lebih atau rugi panas (I2R) konduktor netral melebihi
batasnya [3].
namun pada penelitian tidak dilakukan pemodelan matematis untuk masing-masing
orde harmonisa yang dibangkitkan oleh N buah PC, sehingga persamaan interpolasi yang dihasilkan kurang akurat.
Pada penelitian yang dilakukan oleh Khan dan Akmal [5] dilakukan
pengukuran terhadap THDi yang dihasilkan oleh 1 sampai dengan 23 PC, dengan interpolasi antar PC dilakukan dengan range sebanyak 3 PC.
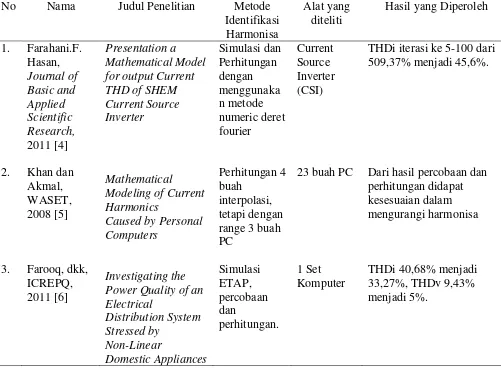
Tabel. 1.1 Penelitian mengenai harmonisa pada PC yang telah dilakukan
No Nama Judul Penelitian Metode Identifikasi Harmonisa
Alat yang diteliti
Hasil yang Diperoleh
1. Farahani.F. Hasan, Journal of Basic and Applied Scientific Research, 2011 [4] Presentation a Mathematical Model for output Current THD of SHEM Current Source Inverter Simulasi dan Perhitungan dengan menggunaka n metode numeric deret fourier Current Source Inverter (CSI)
THDi iterasi ke 5-100 dari 509,37% menjadi 45,6%.
2. 3. Khan dan Akmal, WASET, 2008 [5] Farooq, dkk, ICREPQ, 2011 [6] Mathematical Modeling of Current Harmonics
Caused by Personal Computers
Investigating the Power Quality of an Electrical Distribution System Stressed by Non-Linear Domestic Appliances Perhitungan 4 buah interpolasi, tetapi dengan range 3 buah PC Simulasi ETAP, percobaan dan perhitungan.
23 buah PC
1 Set Komputer
Dari hasil percobaan dan perhitungan didapat kesesuaian dalam mengurangi harmonisa
Dari penelitian yang telah dilakukan tersebut, perbedaan penelitian yang
sudah dilakukan dengan yang akan dilakukan adalah penggunaan pemodelan matetatis harmonisa tegangan dan arus pada PC menggunakan metode interpolasi spline dengan 5 PC yang berbeda setiap tipenya, sedangkan penelitian telah dilakukan
menggunakan metode regresi dengan tipe PC yang sama sebanyak 33 buah.
Pada penelitian ini akan dilakukan pengukuran harmonisa arus dan tegangan
yang dibangkitkan oleh PC mulai dari 1 buah PC sampai 5 buah PC. Setelah diperoleh hasil pengukuran untuk masing-masing orde harmonisa arus dan tegangan, selanjutnya hasil pengukuran tersebut akan diuji dengan metode Interpolasi,
tergantung yang paling mendekati dari hasil pengukuran. Selanjutnya akan diperoleh suatu persamaan akhir yang merupakan nilai THD total dari harmonisa arus dan
tegangan yang diukur. Setelah persamaan tersebut diperoleh maka akan dapat diprediksi THD arus dan THD tegangan yang akan dihasilkan apabila terjadi penambahan PC.
1.2. Perumusan Masalah
Berdasarkan latar belakang masalah maka dirumuskan permasalahan sebagai
berikut: Bagaimana memodelkan secara matematis harmonisa tegangan dan arus yang dihasilkan oleh PC sebagai beban non linier, sehingga diperoleh suatu persamaan yang dapat memprediksi besaran harmonisa tegangan dan arus sesuai dengan
1.3. Batasan Masalah
Pada penelitian ini tidak membahas masalah aliran daya. Penelitian ini hanya membahas tentang perbandingan hasil pengukuran dengan perhitungan menggunakan metode interpolasi polinomial Newton.
1.4. Tujuan Penelitian
Untuk memodelkan secara matematis harmonisa tegangan dan arus yang dihasilkan oleh PC sebagai beban non linier, sehingga diperoleh suatu persamaan yang dapat memodelkan besaran harmonisa tegangan dan arus sesuai dengan data
penukuran PC.
1.5. Manfaat Penelitian
Penelitian ini diharapkan dapat memberi manfaat berupa metode interpolasi polinomial Newton dalam memprediksi besaran THD tegangan dan arus yang
dihasilkan oleh PC. Dengan demikian diharapkan dimasa yang akan datang pemakaian metode-metode yang lainnya dalam memprediksi besaran THD pada
BAB 2
TINJAUAN PUSTAKA
2.1. Personal Computer (PC)
Personal Computer (Gambar 2.1) adalah seperangkat komputer yang digunakan oleh satu orang saja/pribadi. Biasanya komputer ini adanya dilingkungan
rumah, kantor, toko, dan dimana saja karena harga PC sudah relatif terjangkau dan banyak macamnya. Fungsi utama dari PC adalah untuk mengolah data input dan menghasilkan output berupa data/informasi sesuai dengan keinginan user (pengguna).
Dalam pengolahan data yang dimulai dari memasukkan data (input) sampai akhirnya menghasilkan informasi, komputer memerlukan suatu
yang tidak bias terpisahkan. Hardware (perangkat keras) adalah sekumpulan komponen perangakat keras komputer yang secara fisik bisa dilihat, diraba, dirasakan. Hardware ini dibagi menjadi 5 (lima) bagian, yaitu [5]:
a.
b. Process Device, peralatan proses (processor, motherboard, ram),
c. Output Device, peralatan keluaran (Monitor, Printer),
d. Storage Device, peralatan penyimpan (harddisk,flashdisk),
Gambar. 2.1 Personal Computer [5]
2.2. Prinsip Dasar Distorsi Harmonik
Distorsi harmonik disebabkan oleh peralatan non linear pada sistem tenaga listrik. Peralatan non linear adalah alat yang menyebabkan bentuk gelombang arus
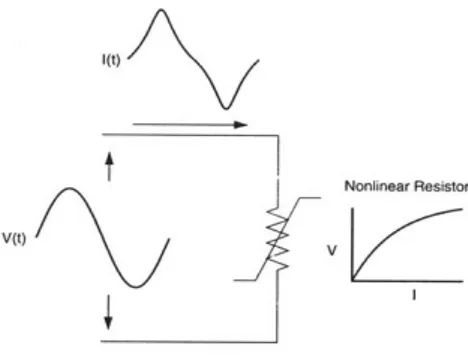
tidak proporsional terhadap gelombang tegangannya [7]. Gambar 2.2 menjelaskan konsep tegangan sinusoidal yang diterapkan pada resistor non linear akan menyebabkan bentuk gelombang antara arus dengan tegangannya berbeda. Bentuk
gelombang tegangan yang diberikan adalah sinusoidal murni sedangkan bentuk gelombang arus yang dihasilkannya adalah sinusoidal yang telah mengalami distorsi.
Gambar 2.2 Distorsi arus akibat beban non linier
Ketika suatu gelombang memiliki bentuk yang identik dari siklus ke siklus, dapat dinyatakan bahwa gelombang tersebut merupakan hasil penjumlahan dari
beberapa gelombang sinusoidal murni yang memiliki frekuensi yang merupakan kelipatan atau hasil perkalian bilangan bulat dari frekuensi gelombang dasar yang
terdistorsi [7]. Gelombang dengan frekuensi kelipatan ini disebut harmonik atau komponen harmonik dari gelombang dasar. Penjumlahan dari gelombang-gelombang sinusoidal tersebut dapat dipecahkan dengan konsep deret fourier [8]. Gambar 2.3
menjelaskan bahwa bentuk gelombang periodik yang terdistorsi dapat diuraikan sebagai suatu jumlah dari gelombang-gelombang sinusoidal [7].
Selanjutnya konsep deret fourier banyak digunakan untuk menganalisa masalah harmonik. Dengan demikian saat ini masalah pada sistem akibat harmonik
terjadi pada sistem akibat setiap harmonik lebih efektif dibandingkan dengan
menganalisa gelombang yang terdistorsi secara keseluruhan. Hasil keluaran dari setiap frekuensi harmonik tersebut kemudian dapat digabungkan kembali untuk mendapatkan suatu deret fourier dimana setelah dilakukan perhitungan, gelombang
keluaran akan dapat ditemukan. Sering kali perhatian tertuju hanya pada besar dari harmonik [8].
Gambar 2.3 Representasi deret fourier dari suatu gelombang terdistorsi [7]
Bentuk tegangan dan arus yang terdistorsi dapat diperoleh dengan
menjumlahkan secara aljabar gelombang dasar (yang dibangkitkan oleh pembangkit) dengan gelombang-gelombang harmonik yang mempunyai frekuensi dan amplitudo
Fourier, arus Is yang non-sinusoidal akan terdiri dari arus fundamental dan komponen
arus yang mengandung harmonisa, dan dinyatakan pada Persamaan (2.1) [8]:
) sin( 2 ) sin( 2 ) ( 1 1
1 h h
h t h Is t Is t
Is = ω −φ +
∑
ω −φ∞
≠
……...…..(2.1)
di mana:
Is = Adalah arus total (A)
Is1 = Adalah nilai rms komponen arus fundamental (A)
Ish = Adalah nilai rms komponen arus harmonisa orde ke h (A)
h = Adalah orde harmonisa (h = 2,3,4,...)
ω
= 2π
f dimana f adalah frekuensi sistem atau frekuensi fundamentalPersamaan Fourier ini dapat digunakan untuk memecah gelombang yang telah
terdistorsi menjadi gelombang dasar dan gelombang harmonik. Hal ini menjadi dasar dalam menganalisa harmonik pada sistem tenaga listrik.
Ketika setengah siklus positif dan negatif pada suatu gelombang memiliki bentuk yang identik, deret fouriernya hanya terdiri atas harmonik ganjil yaitu gelombang harmonik dengan frekuensi kelipatan ganjil dari frekuensi dasarnya. Hal
yang sama pada kedua polaritas. Secara fakta, kehadiran harmonik genap sering kali
menjadi indikator bahwa telah terjadi error, baik itu pada beban yang diukur atau pada transduser alat yang digunakan untuk pengukuran. Meski demikian untuk beberapa hal terdapat pengecualian seperti pada penggunaan penyearah setengah
gelombang dan industri dapur busur [7].
Pada umumnya harmonik orde tinggi (sekitar orde ke-25 hingga ke-50,
tergantung pada sistem) dapat diabaikan untuk analisis sistem tenaga listrik [9]. Meski mereka dapat menyebabkan interferensi terhadap peralatan elektronik berdaya rendah, harmonik orde tinggi tidak akan merusak sistem tenaga listrik. Jika suatu
sistem tenaga listrik digambarkan sebagai komponen-komponen yang tersusun seri dan paralel seperti praktek pada umumnya, peristiwa non linearitas mayoritas terjadi
pada komponen tersusun paralel yaitu pada beban [9]. Impedansi seri dari sistem penyaluran daya listrik, seperti impedansi hubung singkat antara sumber dengan beban, biasanya selalu bersifat linear [9]. Dengan demikian penghasil utama
harmonik yang menyebabkan distorsi harmonik adalah pengguna/pelanggan yang berada di akhir rangkaian sistem. Hal ini bukan berarti semua pengguna yang
mengalami distorsi harmonik adalah merupakan penghasil harmonik, karena secara umum distorsi harmonik adalah sebagai akibat dari kombinasi beban-beban pengguna [9].
2.3. Distorsi Tegangan dan Distorsi Arus
Beban non linear yang biasa terhubung secara paralel tampil sebagai sumber
Pada hampir semua analisis, beban-beban penghasil harmonik ini biasa dianggap
sebagai sumber-sumber arus harmonik [8].
Sebagaimana terlihat pada Gambar 2.4, distorsi tegangan adalah sebagai akibat dari arus terdistorsi melalui impedansi linear yang terpasang seri pada sistem
penyaluran tenaga listrik, meski awalnya bus sumber dianggap sinusoidal murni. Hal ini karena terdapat komponen beban non linear yang menarik arus sehingga
terdistorsi. Arus harmonik yang melalui impedansi sistem menyebabkan tegangan jatuh pada setiap komponen harmonik. Hal ini menyebabkan harmonik tegangan timbul pada komponen beban. Nilai dari distorsi tegangan tergantung dari nilai
impedansi dan juga arusnya [8]. Dengan mengasumsikan nilai distorsi pada komponen beban tetap pada batas wajar (pada kisaran dibawah 5%), nilai dari arus
harmonik yang dihasilkan beban secara umum bernilai konstan [8]. Saat harmonik dari arus beban mutlak mengakibatkan distorsi tegangan, perlu dicatat bahwa beban tersebut tidak memiliki kendali terhadap distorsi tegangan. Dua beban yang sama
ditempatkan pada dua lokasi yang berbeda pada sistem tenaga listrik yang sama maka akan memiliki nilai distorsi tegangan yang berbeda. [8] :
1. Pengendalian terhadap besar arus harmonik yang dihasilkan ke sistem
adalah pada beban di sisi hilir.
2. Dengan mengasumsikan nilai arus harmonik yang dihasilkan adalah pada
Gambar 2.4. Arus yang mengalir melalui beban
Pemaparan fenomena harmonik harus dilakukan secara hati-hati karena terdapat perbedaan antaran penyebab dan akibat dari tegangan dan arus harmonik. Penggunaan istilah harmonik harus memiliki kualifikasi yang jelas. Pada konvensi
yang dikenal secara luas, ketika istilah tersebut digunakan tanpa kata lain mengikutinya, kata harmonik berarti arus harmonik. Namun saat topik pembicaraan
adalah pada utility system maka biasanya subjeknya adalah tegangan harmonik [8].
2.4. Pengaruh Harmonisa
Harmonisa yang diproduksi oleh beban non linier disuntik ke sumber
tegangan sistem. Arus harmonisa tersebut berinteraksi dengan peralatan system yang lebih luas, terutama pada kapasitor, transformator, dan motor, menyebabkan
daya tersebut memutus sendiri, system kendali terkunci dengan sendirinya, dan
banyak lagi permasalahan yang ditimbulkan [8]. Permasalahan ini dapat menyebabkan kerugian keuangan sampai biaya tambahan pemeliharaan. Setiap komponen peralatan sistem distribusi dapat dipengaruhi oleh harmonisa walaupun
dengan akibat yang berbeda. Dengan demikian komponen peralatan tersebut akan mengalami penurunan kinerja dan bahkan akan mengalami kerusakan. Pada keadaan
normal, arus beban setiap fasa dari beban linier yang seimbang pada frekuensi dasarnya akan saling mengurangi sehingga arus netralnya menjadi nol. Sebaliknya beban non linier satu fasa akan menimbulkan harmonisa ganjil kelipatan yang disebut
triplen harmonic (harmonisa ke-3,9,15 dan seterusnya) yang sering disebut harmonisa urutan nol [10].
Dapat dilihat hasil simulasi pada Gambar 2.5 untuk menjelaskan secara visual agar lebih memahami terjadinya harmonisa urutan nol. Makin besar amplitude harmonisa triplen, maka makin besar harmonisa urutan nol, sehingga akan
memperbesar arus netral sistem. Bentuk gelombang harmonisa dapat dilihat pada Gambar 2.5.
Harmonisa ini tidak mehilangkan arus netral tetapi dapat menghasilkan arus netral yang leih tinggi dari arus fasa. Harmonisa pertama urutan polaritasnya adalah positif, harmonisa kedua urutan polaritasnya adalah negative dan harmonisa ketiga
Gambar 2.5 Bentuk gelombang harmonisa arus urutan nol [10]
Akibat yang dapat ditimbulkan oleh urutan polaritas komponen harmonisa
antara lain tingginya arus netral pada system 3 fasa 4 kawat (sisi sekunder transformator) karena arus urutan nol (zero sequence) dan arus ini akan terinduksi
kesisi primer transformator dan akan berputar pada sisi primer transformator yang biasanya memiliki belitan delta. Hal ini akibat pada kawat netral tidak memiliki peralatan pemutus arus untuk proteksi tegangan atau arus lebih. Pengaruh harmonisa
pada transformator sering tanpa disadari dan diantipasi keberadaannya sampai terjadi gangguan yang penyebabnya tidak jelas. Hal ini dapat juga terjadi bila perubahan
konfigurasi atau jenis beban yang dipasok. Transformator dan peralatan induksi lainnya, selalu terpengaruh oleh harmonisa karena transformator itu sendiri dirancang sesuai dengan frekuensi kerjanya. Selain itu transformator juga merupakan media
daya. Selain itu, ada beberapa akibat yang dapat ditimbulkan oleh adanya harmonisa
dalam sistem tenaga listrik, antar lain:
a. Kegagalan Kapasitor bank disebabkan oleh beban reaktif terlalu besar,
sehingga terjadi resonansi, dan mengakibatkan pembesaran amplitude
tegangan harmonisa.
b. Panas berlebihan dan getaran pada motor induksi.
c. Meningkatkan arus urutan negatif pada generator sinkron, dan
membahayakan lilitan dan rangkaian rotor generator.
d. Terjadi tegangan lebih pada sistem tenaga sebagai akibat resonansi antara
kapasitor dengan reaktansi induksi sistem.
e. Menurunkan kapasitas daya hantar kabel yang terkait dengan bertambanya
arus pusar, sehingga terjadi panas dan rugi-rugi tembaga akibat efek kulit. f. Kegagalan pemakaian relay kontaktor, terutama sekali pada sistem
terkendali dengan mikroprosesor.
g. Gangguan pada kendali rippel dan metering.
h. Operasi tidak stabil pada rangkaian detaksi zero cross voltage.
i. Gangguan pada sistem aksitasi pembangkit tenaga listrik dan pengontrolan
motor yang besar.
j. Harmonisa dapat menimbulkan tambahan torsi pada KWh meter jenis
KWh meter pada harmonisa ke 5 dan 7, karena piringan induksi tersebut
dirancang hanya untuk beroperasi pada frekuensi dasar.
k. Interferensi frekuensi pada sistem telekomunikasi karena biasanya kabel
untuk keperluan telekomunikasi berdekatan dengan kawat netral. Triplen
harmonisa pada kawat netral dapat memberikan induksi harmonisa yang menggangu sistem telekomunikasi.
l. Pemutus beban dapat bekerja dibawah arus pengenalan atau mungkin tidak
bekerja pada arus pengenal. Pemutus beban yang dapat terhindar dari gangguan harmonisa pada umumnya adalah pemutus beban yang
mempunyai respon terhadap arus RMS sebenarnya (true RMS current) atau kenaikan temperature karena arus lebih.
2.5. Persamaan Harmonisa
Untuk menentukan besar Total Harmonic Distortion (THD) dari perumusan analisa deret fourier untuk tegangan dan arus dalam fungsi waktu yaitu [10]:
………(2.2)
……...……….(2.3)
Tegangan dan arus RMS dari gelombang sinusoidal yaitu nilai puncak gelombang
dibagi √2 dan secara deret fourier untuk tegangan dan arus yaitu [10]:
�(�) =��+� �����(���+��) ∞
�=1
�(�) =��+� �����(���+��) ∞
………..(2.4)
………..(2.5)
Pada umumnya untuk mengukur besar harmonisa yang disebut dengan Total Harmonic Distortion (THD). Untuk THD tegangan dan arus didefenisikan sebagai
nilai RMS harmonisa urutan diatas frekuensi fundamental dibagi dengan nilai RMS
pada frekuensi fundamentalnya, dan tegangan dc nya diabaikan.
Besar Total Harmonic Distortion (THD) untuk tegangan dan arus ditunjukan pada
Persamaan (2.6 dan 2.7) yaitu:
………. (2.6)
……….(2.7)
Persamaan (2.8) menunjukkan hubungan Persamaan THDi dengan arus RMS:
���� =�0+�� ���
√2� 2
∞
�=1
���� =�0+�� ���
√2� 2 ∞
�=1
����=
�∑ � ��
√2� 2 ∞ �=2 �1 √2 = �∑ (��) 2 ∞ �=2 �1 ���� = �∑ ���
√2� 2 ∞ �=2 �1 √2 =�∑ (��) 2 ∞ �=2 �1
����2 = 1 2� �
di mana:
Sehingga arus RMS terhadap THDI
………...(2.8) yaitu:
2.6. Interpolasi
Metode numerik adalah teknik-teknik yang digunakan untuk merumuskan masalah-masalah matematika agar dapat diselesaikan dengan operasi-operasi
aritmatika (hitungan) biasa (tambah, kurang, kali, dan bagi). Secara harfiah metode numerik berarti cara berhitung dengan menggunakan angka-angka [11].
Perhitungan ini melibatkan sejumlah besar operasi-operasi hitungan yang
berulang-ulang, melelahkan, dan menjemukan. Tetapi dengan adanya computer digital yang semakin lama semakin cepat dalam melakukan hitungan dan dengan
adanya penemuan metode-metode baru dan beberapa modifikasi dari metode-metode lama, maka penggunaan metode numerik dalam menyelesaikan masalah-masalah matematika mengalami kenaikan secara dramatis. Kemajuan yang cepat pada bidang
� �2 �= ∞
�=1
�12+ �12.����2= �12(1 + ����2)
1 2� ��
2 = �12 2 ∞
�=1
�1 +����2�
����= �1,�����1 +����2�
����2 = �1,���2�1 +����2�
����2= 1
2 ∑∞�=2�2�
�21 2
= ∑ � 2
�− �21 ∞
�=1
metode numerik dikarenakan perkembangan komputer itu sendiri. Kita melihat
perkembangan teknologi komputer tidak pernah berakhir. Keunggulan tiap generasi baru komputer dalam hal waktu, memori, ketelitian, dan kestabilan perhitungan menyebabkan pengembangan algoritma numerik yang lebih baik [17].
Ada beberapa alasan mengapa mempelajari metode numerik, yaitu [11]:
1. Metode numerik merupakan alat untuk memecahkan masalah matematika
yang sangat handal. Banyak permasalahan teknik yang mustahil dapat diselesaikan secara analitik, karena kita sering dihadapkan pada sistem-sistem persamaan yang besar, tidak linear dan cakupan yang kompleks, dapat
diselesaikan dengan metode numerik.
2. Program paket numerik, misalnya MATLAB, MAPLE, dan sebagainya yang
digunakan untuk menyelesaikan masalah matematika dengan metode numeric dibuat oleh orang yang mempunyai dasar-dasar teori metode numerik.
3. Banyak masalah matematika yang tidak dapat diselesaikan dengan memakai
program paket atau tidak tercakup dalam program paket. Oleh karena itu kita perlu belajar metode numerik untuk dapat membuat program paket (software)
untuk masalah sendiri.
4. Metode numerik merupakan suatu sarana yang efisien untuk mempelajari
penggunaan komputer.
dengan cara yang formal, yaitu dengan menggunakan rumus-rumus yang
sudah lazim dan konvensional sehingga diperoleh solusi eksak. Solusi eksak yaitu solusi dengan galat sama dengan nol.
b. Secara numeric, yaitu dengan menggunakan metode numerik untuk
memperoleh nilai solusi hampiran dari solusi eksak. Cara ini biasanya dilakukan jika nilai eksak sukar dicari dengan cara analisis.
Pada beberapa masalah sering memerlukan suatu penaksiran nilai antara (intermediate values) yaitu suatu nilai diantara beberapa titik data yang telah diketahui nilainya. Metode yang biasa digunakan untuk menentukan titik antara
tersebut adalah melakukan interpolasi. Metode interpolasi yang biasa digunakan adalah dengan interpolasi Polinomial. Persamaan polinomial orde ke n yang dipakai
secara umum dapat dilihat pada Persamaan (2.9) [11]:
n nx a x
a x a a x
f( )= 0 + 1 + 2 2 +...+ ………..…(2.9)
Persamaan polinomial ini merupakan persamaan aljabar yang hanya
mengandung jumlah dari variabel x berpangkat bilangan bulat (integer). Untuk n+1 titik data, hanya terdapat satu polinomial order n atau kurang yang melalui semua
titik. Misalnya hanya terdapat satu garis lurus (polinomial order satu) yang menghubungkan dua titik, lihat Gambar 2.6, (a). Demikian juga dengan menghubungkan tiga titik dapat membentuk suatu parabola (polinomial order 2), lihat
order tiga, lihat Gambar 2.6 (c). Dengan operasi interpolasi kita dapat menentukan
suatu persamaan polinomial order ke n yang melalui n+1 titik data, yang kemudian digunakan untuk menentukan suatu nilai (titik antara) diantara titik data tersebut [11].
`
[image:39.612.131.490.211.368.2](a) (b) (c)
Gambar 2.6. Interpolasi Polinomial (a). orde 2, (b). orde 3, (c). orde n+1 [11]
2.6.1. Teori model matematis polinomial interpolasi metode newton evaluasi dari polynomial.
Meskipun metode Lagrange konseptualnya sederhana, tidak meminjamkan dirinya untuk algoritma yang efisien. Sebuah prosedur komputasi yang lebih baik
diperoleh dengan metode Newton, di mana polinomial interpolasi ditulis dalam bentuk Persamaan (2.10) [11].
��−1(�) =�1 + (� − �1)�2+ (� − �1)(� − �2)�3
+⋯+ (� − �1)(� − �2) … (� − ��−1)��...(2.10)
Polinomial ini cocok untuk prosedur evaluasi yang efisien. Perhatikan, misalnya, empat titik data (n = 4). Berikut polinomial interpolasi adalah
●
●
�3(�) =�1+ (� − �1)�2+ (� − �1)(� − �2)�3+ (� − �1)(� − �2)(� − �3)�4
= �1+ (� − �1){�2(� − �2)[�3+ (� − �3)�4]}
Yang dapat dievaluasi mundur dengan hubungan pengulangan berikut:
�0(�) =�4
�1(�) =�3+ (� − �3)�0(�)
�2(�) =�2 + (� − �2)�1(�)
�3(�) =�1+ (� − �1)�2(�)
Untuk n sembarang diperoleh Persamaan (2.11)
�0(�) =�� ��(�) =��−�+ (� − ��−�)�1−�(�), �= 1,2, … ,� −1….. (2.11)
memperkenalkan perbedaan dibagi
∇�� = ��� − �1
� − �1,� = 2, 3, … ,�
∇2�
� = ∇��� − ∇�2
� − �2 ,� = 3, 4, … ,�
∇3�
� = ∇
2�
� − ∇2�3
�� − �3 ,� = 4, 5, … ,�
⋮
∇
��
�=
∇�−1�
�−∇�−1��−1
solusi dari Persamaan. (�) adalah
�1 =�1 �2 =∇�2 �3 = ∇2�3⋯ �� =∇���………..(2.13)
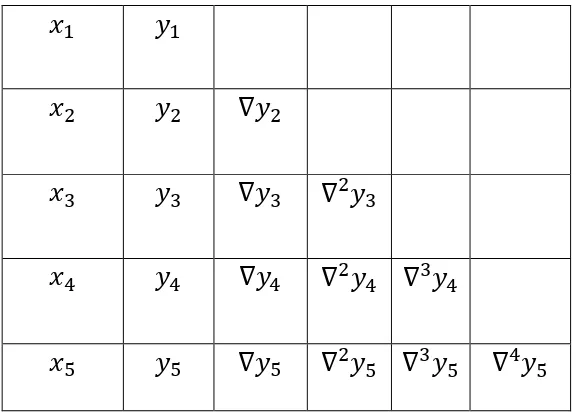
[image:41.612.177.465.270.477.2]jika koefisien dihitung dengan tangan, akan lebih mudah untuk bekerja dengan format dalam Tabel 2.1 (ditampilkan hanya untuk n = 5).
Tabel 2.1 Format perhitungan koefisien yang dihitung dengan tangan
�
1�
1�
2�
2∇�
2�
3�
3∇�
3∇
2�
3�
4�
4∇�
4∇
2�
4∇
3�
4�
5�
5∇�
5∇
2�
5∇
3�
5∇
4�
5istilah diagonal �1,∇�2,∇2�3,∇3�4,���∇4�5 dalam Tabel adalah koefisien akan berubah, tetapi polinomial yang dihasilkan akan sama-ingat bahwa polinomial derajat
n-1 interpolasi titik data n yang berbeda adalah unik. Awalnya, mengandung y-nilai data, sehingga identik dengan kolom kedua pada Tabel 2.1. setiap melewati loop
BAB 3
METODOLOGI PENELITIAN
Pemodelan matematis harmonisa tegangan dan arus yang dihasilkan oleh PC,
akan diperoleh setelah melakukan pengukuran terhadap harmonisa tegangan dan arus, dimulai dari 1 buah PC sampai 5 buah PC dengan spesifikasi yang berbeda.
3.1. Metode Pengumpulan Data
Pengumpulan data dilakukan setelah melakukan studi literatur dan pemilihan jurnal ilmiah yang sesuai. Data yang dipilih digunakan sebagai suatu masukan
terhadap perancangan selanjutnya dalam memodelkan hasil pengukuran.
Gambar. 3.1 Personal Computer (PC) yang diteliti
3.2. Teknik Analisis Data
Setelah parameter jaringan dan parameter Personal Computer (PC)diperoleh
arus yang dihasilkan oleh satu PC. Pengukuran tersebut akan dilakukan untuk
masing-masing PC dengan spesifikasi yang berbeda. Hasil pengukuran akan dianalisa dengan menggunakan persamaan interpolasi polynomial metode Newton, tergantung dari pola persamaan yang ditimbulkan oleh harmonisa tegangan dan arus.
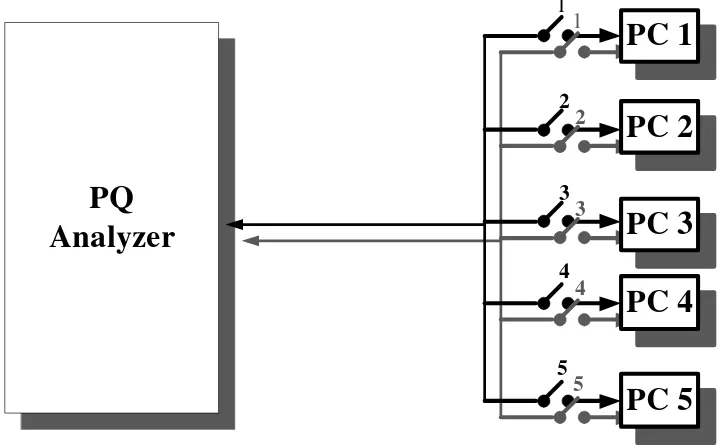
3.3. Rancangan Model Penelitian
Pengukuran harmonisa tegangan dan arus yang ditimbulkan oleh PC, digambarkan pada Gambar 3.2 berikut ini:
PQ
Analyzer
PC 1
PC 2
PC 3
PC 4
PC 5
1
1
2 2
3 3
4 4
[image:43.612.139.500.362.585.2]5 5
Gambar 3.2 Pengukuran harmonisa tegangan dan arus yang ditimbulkan oleh PC
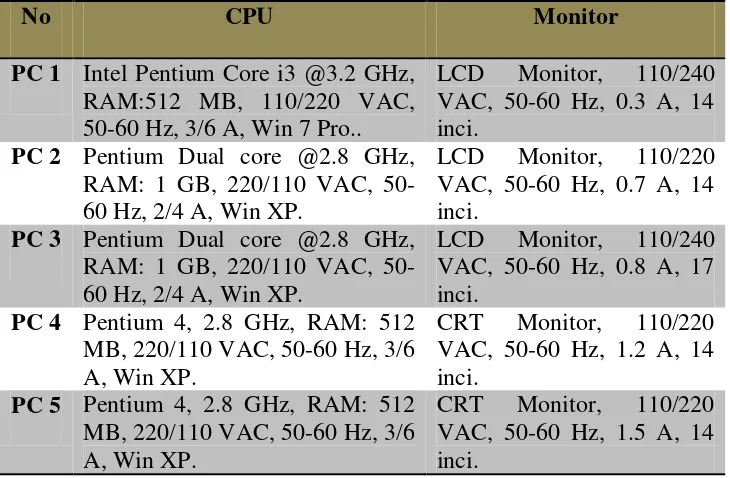
Berikut ini merupakan data yang diambil dari pengukuran PC telah diukur melalui alat power Quality Analyzer. Data-data dapat ditunjukan pada Tabel 3.1 dan
Tabel 3.1 Data Spesifikasi Personal Computer (PC)
No CPU Monitor
PC 1 Intel Pentium Core i3 @3.2 GHz, RAM:512 MB, 110/220 VAC, 50-60 Hz, 3/6 A, Win 7 Pro..
LCD Monitor, 110/240 VAC, 50-60 Hz, 0.3 A, 14 inci.
PC 2 Pentium Dual core @2.8 GHz, RAM: 1 GB, 220/110 VAC, 50-60 Hz, 2/4 A, Win XP.
LCD Monitor, 110/220 VAC, 50-60 Hz, 0.7 A, 14 inci.
PC 3 Pentium Dual core @2.8 GHz, RAM: 1 GB, 220/110 VAC, 50-60 Hz, 2/4 A, Win XP.
LCD Monitor, 110/240 VAC, 50-60 Hz, 0.8 A, 17 inci.
PC 4 Pentium 4, 2.8 GHz, RAM: 512 MB, 220/110 VAC, 50-60 Hz, 3/6 A, Win XP.
CRT Monitor, 110/220 VAC, 50-60 Hz, 1.2 A, 14 inci.
PC 5 Pentium 4, 2.8 GHz, RAM: 512 MB, 220/110 VAC, 50-60 Hz, 3/6 A, Win XP.
CRT Monitor, 110/220 VAC, 50-60 Hz, 1.5 A, 14 inci.
Tabel 3.2. Data Hasil Pengukuran
Parameter Satuan PC
PC 1 PC 2 PC 3 PC 4 PC 5
V (Phase Voltage) Volt 209,8 207.8 216,5 215 218,2
I (Phase Current) Ampere 0.56 0.52 0.51 0.44 0.44
S (Apparent Power) VA 110 110 120 160 120
P (Active Power) Watt 70 60 70 110 90
Q (Reative Power) Var 90 90 100 120 80
PF (Power Factor) 0.67 0.69 0.58 0.69 0.76
THDv % 2.33 2.23 2.3 3.32 0.89
THDi % 120.32 104.1 131.8 96.6 81.15
Frekuensi Hz 50 50 50 50 50
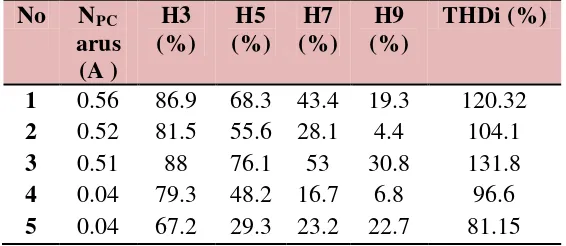
Pada Tabel 3.3 menunjukan bahwa data hasil pengukuran individual distorsi harmonisa arus (IHDi) dan individual distorsi harmonisa tegangan (IHDv) dari setiap
[image:44.612.121.523.433.609.2]harmonisa ganjil dari orde ke-1 sampai dengan orde ke-15 dengan nilai yang berbeda
[image:45.612.179.462.252.375.2]untuk setiap harmonisa. Data spesifikasi dari setiap Personal Computer (PC) dapat dilihat pada Tabel 3.1, di mana data tersebut merupakan sebagai masukan dalam model matematika yang diinginkan.
Tabel. 3.3 Data hasil pengukuran harmonisa arus pada setiap PC
No NPC arus (A ) H3 (%) H5 (%) H7 (%) H9 (%) THDi (%)
1 0.56 86.9 68.3 43.4 19.3 120.32 2 0.52 81.5 55.6 28.1 4.4 104.1 3 0.51 88 76.1 53 30.8 131.8 4 0.04 79.3 48.2 16.7 6.8 96.6 5 0.04 67.2 29.3 23.2 22.7 81.15
Tabel. 3.4 Data hasil pengukuran harmonisa tegangan pada setiap PC
No NPC tegangan (V) H3 (%) H5 (%) H7 (%) H9 (%) THDv (%) 1 209.8 1.1 1.7 0.9 0.5 2.33
2 207.8 1 1.9 0.6 0.6 2.23
3 216.5 0.5 2 0.9 0 2.3
4 215 2.2 2.1 1.2 0.4 3.32
5 218.2 0.3 0.5 0.6 0 0.89
Pada Tabel 3.3 ditunjukan bahwa nilai arus pada PC merupakan nilai input
yang dimasukan ke dalam persamaan sebagai nilai xn dan untuk nilai masukan yn
merupakan nilai setiap orde harmonisa arus dari orde harmonisa 1 sampai dengan
[image:45.612.181.463.425.534.2]nilai masukan yn
3.4 Perhitungan Interpolasi Polinomial dengan metode Newton
merupakan nilai harmonisa tegangan dari orde harmonisa ke-1
sampai dengan harmonisake-15.
Dalam menentukan besarnya parameter yang dibutuhkan, terlebih dahulu
diperhatikan nilai spesifikasi dari setiap PC. Dari Tabel 3.3 dan 3.4 diperoleh bahwa data masukan untuk model matematikanya merupakan data arus monitor pada setiap
PC dan data pengukuran tegangan setiap PC. Dari data tersebut dapat dibuatkan dalam persamaan sebagai berikut:
3.4.1. Perhitungan Berdasarkan Data Arus Setiap PC a. Harmonisa Orde Ke-3
Perhitungan pada harmonisa Orde Ke-3, di mana untuk perhitungan harmonisa orde ke-3 di peroleh data (0.56, 86.9), (0.52, 81.5), (0.51, 88), dan (0.44, 79.3).
�1 = �1 = 86.9
�2 =∇�2 = ��2− �1 2− �1 =
81.5−86.9
0.52−0.56= 135
Dan dilanjutkan dengan perhitungan untuk nilai ∇�� di mana i = 2, 3, 4,…..
∇�3 = ��3− �1 3− �1 =
88−86.9
0.52−0.56= −22
∇�4 = ��4− �1 4− �1 =
79.3−86.9
0.44−0.56= 63.33
�3 = ∇2�3 = ∇��3− ∇�2
3− �2 =
−22 + 13.5)
0.51−0.56 = 15700
∇2�
4 = ∇��4− ∇�2
4− �2 =
(6−)−(−13.5)
0.44−0.56 = 895.83
Maka dari perhitungan sebelumnya, dapat diperoleh nilai �4
�4 =∇3�4 = ∇ 2�
4− ∇2�3
�4− �3 =
211488.1−15700
0.44−0.56 = 211488.1
Jadi nilai yang diperoleh polinomial Newton orde keempat adalah:
�0(�) =�4 = 211488.1
�1(�) =�3+ (� − �3)�0(�) = 15700 + (� −0.51)(211488.1)
= 15700 + (211488.1� −107858.931) = 211488.1� −92158.931
�2(�) =�2+ (� − �2)�1(�) = 135 + (� −0.52)(211488.1� −92158.931)
= 135 + (211488.1�2−92158.931� −109973.8�+ 47922.6) = 211488.1�2−202132.7�+ 48057.6
�3(�) =�1+ (� − �1)�2(�) = 86.9 + (� −0.56)(211488.1�2−202132.7�+
48057.6)
= 86.9 + 211488.1�3−320566.04�2+ 161251.92� −26912.26
= 211488.1�3−320566.04�2+ 161251.92� −26825.36
b. Harmonisa Orde Ke-5
Di mana untuk perhitungan harmonisa orde ke-5 di peroleh data (0.56, 68.3),
�1 = �1 = 68.3
�2 =∇�2 = ��2− �1 2− �1 =
55.6−68.3
0.52−0.56= 317.5
Dan dilanjutkan dengan perhitungan untuk nilai ∇�� di mana i = 2, 3, 4,…..
∇�3 = ��3− �1 3− �1 =
76.1−68.3
0.51−0.56=−156
∇�4 = ��4− �1 4− �1 =
48.2−68.3
0.44−0.56= 167.5
Maka dari perhitungan sebelumnya, dapat diperoleh nilai �3
�3 = ∇2�3 = ∇��3− ∇�2
3− �2 =
−156−317.5
0.51−0.52 = 47350
∇2�
4 = ∇��4− ∇�2
4− �2 =
167.5−(−317.5)
0.44−0.52 = 1875
Maka dari perhitungan sebelumnya, dapat diperoleh nilai �4
�4 = ∇3�4 = ∇ 2�
4− ∇2�3
�4− �3 =
1875−47350
0.44−0.51 = 649642.86
Jadi nilai yang diperoleh polinomial Newton orde keempat adalah:
�0(�) =�4 = 649642.86
�1(�) =�3 + (� − �3)�0(�) = 47350 + (� −0.51)(649642.86)
= 47350 + (649642.86� −331317.86) = 649642.86� −283967.86
�2(�) =�2 + (� − �2)�1(�) = 317.5 + (� −0.52)(649642.86� −283967.86)
�3(�) =�1+ (� − �1)�2(�) = 68.3 + (� −0.56)(649642.86�2−53846.43�+
147980.78)
= 68.3 + 649642.86�3−417646.43�2+ 178134.78� −82869.24
= 649642.86�3−417646.43�2+ 178134.78� −82800.94
c. Harmonisa Orde Ke-7
Di mana untuk perhitungan harmonisa orde ke-7 di peroleh data (0.56, 43.4), (0.52, 28.1), (0.51, 53), dan (0.44, 16.7).
�1 = �1 = 43.4
�2 =∇�2 = ��2− �1 2− �1 =
28.1−43.
0.52−0.56= 382.5
Dan dilanjutkan dengan perhitungan untuk nilai ∇�� di mana i = 2, 3, 4,…..
∇�3 = ��3− �1 3− �1 =
53−43.4
0.51−0.56=−192
∇�4 = ��4− �1 4− �1 =
16.7−43.4
0.44−0.56= 222.5
Maka dari perhitungan sebelumnya, dapat diperoleh nilai �3
�3 = ∇2�3 = ∇��3− ∇�2
3− �2 =
−192−382.5
0.51−0.52 = 57450
∇2�
4 = ∇��4− ∇�2
4− �2 =
222.5−382.5
0.44−0.52 = 2000
Maka dari perhitungan sebelumnya, dapat diperoleh nilai �4
�4 = ∇3�4 = ∇ 2�
4− ∇2�3
�4− �3 =
2000−57450
0.44−0.51 = 792142.86
�0(�) =�4 = 792142.86
�1(�) =�3 + (� − �3)�0(�) = 57450 + (� −0.51)(792142.86)
= 57450 + (792142.86� −403992.86) = 792142.86� −346542.86
�2(�) =�2 + (� − �2)�1(�) = 382.5 + (� −0.52)(792142.86� −346542.86)
= 382.5 + (792142.86�2−758457.15�+ 180202.29) = 792142.86�2−758457.15�+ 180584.79
�3(�) =�1+ (� − �1)�2(�) = 43.4 + (� −0.56)792142.86�2−758457.15�+
180584.79
= 43.4 + 792142.86�3−1202057�2+ 605320.8� −101127.5
= 792142.86�3−1202057�2+ 605320.8� −101170.88
d. Harmonisa Orde Ke-9
Di mana untuk perhitungan harmonisa orde ke-9 di peroleh data (0.56, 19.3),
(0.52, 4.4), (0.51, 30.8), dan (0.44, 6.8).
�1 = �1 = 19.3
�2 =∇�2 = ��2− �1 2− �1 =
4.4−19.3
0.52−0.56= 3725
Dan dilanjutkan dengan perhitungan untuk nilai ∇�� di mana i = 2, 3, 4,…..
∇�3 = ��3− �1 3− �1 =
30.8−19.3
∇�4 = ��4− �1 4− �1 =
6.8−19.3
0.44−0.56= 104.17
Maka dari perhitungan sebelumnya, dapat diperoleh nilai �3
�3 =∇2�3 = ∇��3 − ∇�2
3 − �2 =
−230−3725
0.51−0.52 = 60250
∇2�
4 = ∇��4− ∇�2
4 − �2 =
104.17−3725
0.44−0.52 = 3354.167
Maka dari perhitungan sebelumnya, dapat diperoleh nilai �4
�4 =∇3�4 = ∇ 2�
4− ∇2�3
�4− �3 =
3354.167−60250
0.44−0.51 = 812797.62
Jadi nilai yang diperoleh polinomial Newton orde keempat adalah:
�0(�) =�4 = 812797.62
�1(�) =�3 + (� − �3)�0(�) = 60250 + (� −0.51)(812797.62)
= 60250 + (812797.62� −414526.78) = 812797.62� −354276.78
�2(�) =�2+ (� − �2)�1(�) = 3725 + (� −0.52)(812797.62� −354276.78)
= 3725 + (812797.62�2−776931.6�+ 184223.9) = 812797.62�2−776931.6�+ 187948.9
�3(�) =�1+ (� − �1)�2(�) = 19.3 + (� −0.56)(812797.62�2−776931.6�+
187948.9)
= 19.3 + 812797.62�3−1232098.27�2+ 623030.6� −105251.4
Dari perhitungan di atas nilai-nilai orde setiap harmonisa arus dan THDi dapat
dikelompokan berdasarkan PC. 1. Perhitungan THDi Pada PC 1
Pada PC 1 dapat dihitung nilai THDi untuk setiap magnitude dari setiap orde
harmonisa menggunakan persamaan sebagai berikut: Di mana nilai Irms
RMS magnitude dari harmonisa arus orde ke-3 = 86.9%dari 0.56 = 0.48664 A = 0.56 A
RMS magnitude dari harmonisa arus orde ke-5 = 68.3%dari 0.56 = 0.38248 A RMS magnitude dari harmonisa arus orde ke-7 = 43.4%dari 0.56 = 0.24304 A
RMS magnitude dari harmonisa arus orde ke-9 = 19.3%dari 0.56 = 0.10808 A Maka
���� =�����3
2 +�
���5
2 +�
���7
2 +�
���92
����
���� =�
(0.48664)2+ (0.38248)2+ (0.24304)2+ (0.10808)2 0.56
���� = 120.30 %
2. Perhitungan THDi Pada PC 2
Pada PC 2 dapat dihitung nilai THDi untuk setiap magnitude dari setiap orde
harmonisa menggunakan persamaan sebagai berikut: Di mana nilai Irms
RMS magnitude dari harmonisa arus orde ke-5 = 55.6%dari 0.52 = 0.28912 A
RMS magnitude dari harmonisa arus orde ke-7 = 28.1%dari 0.52 = 0.14612 A RMS magnitude dari harmonisa arus orde ke-9 = 4.4%dari 0.52 = 0.02288 A Maka :
���� =�����3
2 +�
���5
2 +�
���7
2 +�
���92
����
���� =�(0.4238 )
2+ (0.28912)2+ (0.14612)2+ (0.02288)2
0.52
���� = 102.6%
3. Perhitungan THDi Pada PC 3
Pada PC 3 dapat dihitung nilai THDi untuk setiap magnitude dari setiap orde
harmonisa menggunakan persamaan sebagai berikut:
Di mana nilai Irms
RMS magnitude dari harmonisa arus orde ke-3 = 88%dari 0.51 = 0.4488 A = 0.51 A
RMS magnitude dari harmonisa arus orde ke-5 = 76.1%dari 0.51 = 0.38811 A RMS magnitude dari harmonisa arus orde ke-7 = 53%dari 0.51 = 0.2703 A
RMS magnitude dari harmonisa arus orde ke-9 = 30.8%dari 0.51 = 0.15708 A Maka
���� =�����3
2 +�
���5
2 +�
���7
2 +�
���92
���� =�
(0.4488)2+ (0.38811)2+ (0.2703)2+ (0.15708)2 0.51
���� = 131.5 %
4. Perhitungan THDi Pada PC 4
Pada PC 4 dapat dihitung nilai THDi untuk setiap magnitude dari setiap orde harmonisa menggunakan persamaan sebagai berikut:
Di mana nilai Irms
RMS magnitude dari harmonisa arus orde ke-3 = 79.3%dari 0.44 = 0.34892A = 0.44 A
RMS magnitude dari harmonisa arus orde ke-5 = 48.2%dari 0.44 = 0.21208A RMS magnitude dari harmonisa arus orde ke-7 = 16.7%dari 0.44 = 0.07348A RMS magnitude dari harmonisa arus orde ke-9 = 6.8%dari 0.44 = 0.02992A
Maka :
���� =�����3
2 +�
���5
2 +�
���7
2 +�
���92
����
���� =�
(0.34892)2+ (0.21208)2+ (0.07348)2+ (0.02992)2 0.44
���� = 191.17 %
5. Perhitungan THDi Pada PC 5
Di mana PC 5 merupakan sebagai titik pembanding antara PC 1, PC 2, PC 3
Di mana nilai Irms
RMS magnitude dari harmonisa arus orde ke-3 = 67.2% dari 0.44 = 0.2957 A = 0.44 A
RMS magnitude dari harmonisa arus orde ke-5 = 29.3% dari 0.44 = 0.1289 A RMS magnitude dari harmonisa arus orde ke-7 = 23.2% dari 0.44 = 0.1021 A
RMS magnitude dari harmonisa arus orde ke-9 = 22.7% dari 0.44 = 0.0998 A Maka
���� =�����3
2 +�
���5
2 +�
���7
2 +�
���92
����
���� =�
(0.2957 )2+ (0.1289)2+ (0.1021)2+ (0.0998)2 0.44
���� = 80.17%
3.4.2. Perhitungan Berdasarkan Data Pengukuran Tegangan Setiap PC a. Harmonisa Orde Ke-3
Perhitungan harmonisa tegangan orde 3, di mana untuk perhitungan harmonisa orde 3 di peroleh data (207.8, 1), (209.8, 1.1), (215, 2.2), dan (216.5, 0.5).
�1 = �1 = 1
�2 =∇�2 = ��2− �1 2− �1 =
1.1−1
209.8−207.8= 0.05
Dan dilanjutkan dengan perhitungan untuk nilai ∇�� di mana i = 2, 3, 4,…..
∇�3 = ��3− �1 3− �1 =
2.2−1
∇�4 = ��4− �1 4− �1 =
0.5−1
216.5−207.8=−0.0575
Maka dari perhitungan sebelumnya, dapat diperoleh nilai �3
�3 = ∇2�3 = ∇��3− ∇�2
3− �2 =
0.1667−0.05
215−209.8 = 0.0224
∇2�
4 = ∇��4− ∇�2
4− �2 =
(−0.0575)−(0.05)
216.5−209.8 =−0.016
Maka dari perhitungan sebelumnya, dapat diperoleh nilai �4
�4 =∇3�4 = ∇ 2�
4− ∇2�3
�4− �3 =
(−0.016−0.0224)
216.5−215 = −0.025
Jadi nilai yang diperoleh polinomial Newton orde keempat adalah:
�0(�) =�4 = −0.025
�1(�) =�3+ (� − �3)�0(�) = 0.0224 + (� −215)(−0.025)
= 0.0224−0.025�+ 5.375 =−0.025�+ 5.3974
�2(�) =�2+ (� − �2)�1(�) = 0.05 + (� −209.8)(−0.025�+ 5.3974)
= 0.05−0.025�2+ 5.3974�+ 5.245� −1132.4 =−0.025�2−10.64� −1132.35
�3(�) =�1+ (� − �1)�2(�)
= 1 + (� −207.8)(−0.025�2−10.64� −1132.5)
b. Harmonisa Orde Ke-5
Di mana untuk perhitungan harmonisa orde ke-5 di peroleh data (207.8, 1.9), (209.8, 1.7), (215, 2.1), dan (216.5, 2).
�1 = �1 = 1.9
�2 = ∇�2 = ��2− �1 2− �1 =
1.7−1.9
209.8−207.8= −0.1
Dan dilanjutkan dengan perhitungan untuk nilai ∇�� di mana i = 2, 3, 4,…..
∇�3 = ��3− �1 3− �1 =
2.1−1.9
215−207.8= 0.0278
∇�4 = ��4− �1 4− �1 =
2−1.9
216.5−207.8= 0.0115
Maka dari perhitungan sebelumnya, dapat diperoleh nilai �3
�3 =∇2�3 = ∇��3 − ∇�2
3 − �2 =
0.0278−(−0.1)
215−209.8 = 0.025
∇2�
4 = ∇��4− ∇�2
4− �2 =
(0.0115)−(−0.1)
216.5−209.8 = 0.0166
Maka dari perhitungan sebelumnya, dapat diperoleh nilai �4
�4 =∇3�4 = ∇ 2�
4− ∇2�3
�4− �3 =
(0.0166−0.025)
216.5−215 =−0.0053
Jadi nilai yang diperoleh polinomial Newton orde keempat adalah:
�0(�) =�4 =−0.0053
�1(�) =�3+ (� − �3)�0(�) = 0.025 + (� −215)(−0.0053)
�2(�) =�2+ (� − �2)�1(�) =−0.1 + (� −209.8)(−0.0053�+ 1.1645)
=−0.1−0.0053�2+ 1.1645�+ 1.11194� −244.31 =−0.0053�2+ 2.27644� −244.41
�3(�) =�1+ (� − �1)�2(�)
= 1.9 + (� −207.8)(−0.0053�2+ 2.27644� −244.41)
= 1.9 + (−0.0053�3+ 3.37778�2−717.45�+ 50788.4) = −0.0053�3+ 3.37778�2−717.45�+ 50790.3
c. Harmonisa Orde Ke-7
Di mana untuk perhitungan harmonisa orde ke-7 di peroleh data (207.8, 0.6),
(209.8, 0.9), (215, 1.2), dan (216.5, 0.9).
�1 = �1 = 0.6
�2 =∇�2 = ��2− �1 2− �1 =
0.9−0.6
209.8−207.8= 0.15
Dan dilanjutkan dengan perhitungan untuk nilai ∇�� di mana i = 2, 3, 4,…..
∇�3 = ��3− �1 3− �1 =
1.2−0.6
215−207.8= 0.083
∇�4 = ��4− �1 4− �1 =
0.9−0.6
216.5−207.8= 0.035
Maka dari perhitungan sebelumnya, dapat diperoleh nilai �3
�3 = ∇2�3 = ∇��3− ∇�2
3− �2 =
0.083−0.15
215−209.8 =−0.0128
∇2�
4 = ∇��4− ∇�2
4− �2 =
(0.035)−0.15
Maka dari perhitungan sebelumnya, dapat diperoleh nilai �4
�4 =∇3�4 = ∇ 2�
4− ∇2�3
�4− �3 =
(−0.0172−(−0.0128))
216.5−215 =−0.0029
Jadi nilai yang diperoleh polinomial Newton orde keempat adalah:
�0(�) =�4 =−0.0029
�1(�) =�3+ (� − �3)�0(�) =−0.0128 + (� −215)(−0.0029)
=−0.0128−0.0029�+ 0.6235 =−0.0029�+ 0.6107
�2(�) =�2+ (� − �2)�1(�) = 0.15 + (� −209.8)(−0.0029�+ 0.6107)
= 0.15−0.0029�2+ 1.22� −128.125 =−0.0029�2+ 1.22� −127.9
�3(�) =�1+ (� − �1)�2(�)
= 0.6 + (� −207.8)(−0.0029�2+ 1.22� −127.9)
= 0.6 + (−0.0029�3+ 1.82�2−381.42�+ 26577.62) = −0.0029�3+ 1.82�2−381.42�+ 26578.22
d. Harmonisa Orde Ke-9
Di mana untuk perhitungan harmonisa orde ke-9 di peroleh data (207.8, 0.6),
(209.8, 0.5), (215, 0.4), dan (216.5, 0).
�2 = ∇�2 = ��2− �1 2− �1 =
0.5−0.6
209.8−207.8= −0.05
Dan dilanjutkan dengan perhitungan untuk nilai ∇�� di mana i = 2, 3, 4,…..
∇�3 = ��3− �1 3− �1 =
0.4−0.6
215−207.8= −0.0278
∇�4 = ��4− �1 4− �1 =
0−0.6
216.5−207.8=−0.069
Maka dari perhitungan sebelumnya, dapat diperoleh nilai �3
�3 = ∇2�3 = ∇��3− ∇�2
3− �2 =
−0.0278−(−0.05)
215−209.8 = 0.0043
∇2�
4 = ∇��4− ∇�2
4− �2 =
(−0.069)−(−0.05)
216.5−209.8 =−0.00283
Maka dari perhitungan sebelumnya, dapat diperoleh nilai �4
�4 =∇3�4 = ∇ 2�
4− ∇2�3
�4 − �3 =
(−0.00283−0.0043)
216.5−215 = −0.0047
Jadi nilai yang diperoleh polinomial Newton orde keempat adalah:
�0(�) =�4 =−0.0047
�1(�) =�3+ (� − �3)�0(�) = 0.0043 + (� −215)(−0.0047)
= 0.0043−0.0047�+ 1.0105 = −0.0047�+ 1.0148
�2(�) =�2+ (� − �2)�1(�) =−0.05 + (� −209.8)(−0.0047�+ 1.0148)
�3(�) =�1+ (� − �1)�2(�)
= 0.6 + (� −207.8)(−0.0047�2+ 2.00086� −212.95)
= 0.6 + (−0.0047�3+ 2.97�2−628.73�+ 44251.01) = −0.0047�3+ 2.97�2−628.73�+ 44251.61
Dari perhitungan di atas nilai-nilai orde setiap harmonisa tegangan dan THDv dapat dikelompokan berdasarkan PC.
1. Perhitungan THDv Pada PC 1
Pada PC 1 dapat dihitung nilai THDv untuk setiap magnitude dari setiap orde harmonisa menggunakan persamaan sebagai berikut:
Di mana nilai Vrms
RMS magnitude dari harmonisa tegangan orde ke-3 = 1.1% dari 209.8 = 2.3 V = 209.8 V
RMS magnitude dari harmonisa tegangan orde ke-5 = 1.7% dari 209.8 = 3.56 V
RMS magnitude dari harmonisa tegangan orde ke-7 = 0.9% dari 209.8 = 1.88 V RMS magnitude dari harmonisa tegangan orde ke-9 = 0.5% dari 209.8 = 1.049 V Maka
���� =�����3
2 +�
���52 +����72 +����92
����
���� = �(2.3)
2+ (3.56)2+ (1.88 )2+ (1.049)2
209.8
2. Perhitungan THDv Pada PC 2
Pada PC 2 dapat dihitung nilai THDv untuk setiap magnitude dari setiap orde harmonisa menggunakan persamaan sebagai berikut:
Di mana nilai Vrms
RMS magnitude dari harmonisa tegangan orde ke-3 = 1% dari 207.8 = 2.078 V = 207.8 V
RMS magnitude dari harmonisa tegangan orde ke-5 = 1.9% dari 207.8 = 3.95 V
RMS magnitude dari harmonisa tegangan orde ke-7 = 0.6% dari 207.8 = 1.25 V RMS magnitude dari harmonisa tegangan orde ke-9 = 0.6% dari 207.8 = 1.25 V Maka
���� =�����3
2 +�
���52 +����72 +����92
����
���� = �(2.078)
2+ (3.95)2+ (1.25 )2+ (1.25)2
207.8
���� = 2.31 %
3. Perhitungan THDi Pada PC 3
Pada PC 3 dapat dihitung nilai THDv untuk setiap magnitude dari setiap orde
harmonisa menggunakan persamaan sebagai berikut: Di mana nilai Vrms
RMS magnitude dari harmonisa tegangan orde ke-3 = 0.5% dari 216.5 = 1.08 V = 216.5 V
RMS magnitude dari harmonisa tegangan orde ke-9 = 0% dari 216.5 = 0 V
Maka
���� =�����3
2 +�
���52 +����72 +����92
����
���� =�
(1.08)2+ (4.33)2 + (1.95 )2+ (0)2 216.5
���� = 2.24 %
4. Perhitungan THDv Pada PC 4
Pada PC 4 dapat dihitung nilai THDv untuk setiap magnitude dari setiap orde harmonisa menggunakan persamaan sebagai berikut:
Di mana nilai Vrms
RMS magnitude dari harmonisa tegangan orde ke-3 = 2.2% dari 215 = 4.73 V = 215 V
RMS magnitude dari harmonisa tegangan orde ke-5 = 2.1% dari 215 = 4.515V
RMS magnitude dari harmonisa tegangan orde ke-7 = 1.2% dari 215 = 2.58 V RMS magnitude dari harmonisa tegangan orde ke-9 = 0% dari 215 = 0 V Maka
���� =�����3
2 +�
���52 +����72 +����92
����
���� =�(4.73)
![Gambar 2.6. Interpolasi Polinomial (a). orde 2, (b). orde 3, (c). orde n+1 [11]](https://thumb-ap.123doks.com/thumbv2/123dok/333110.30375/39.612.131.490.211.368/gambar-interpolasi-polinomial-orde-orde-orde.webp)