BAB 2
TINJAUAN PUSTAKA
2.1. Personal Computer (PC)
Personal Computer (Gambar 2.1) adalah seperangkat komputer yang digunakan oleh satu orang saja/pribadi. Biasanya komputer ini adanya dilingkungan
rumah, kantor, toko, dan dimana saja karena harga PC sudah relatif terjangkau dan banyak macamnya. Fungsi utama dari PC adalah untuk mengolah data input dan menghasilkan output berupa data/informasi sesuai dengan keinginan user (pengguna).
Dalam pengolahan data yang dimulai dari memasukkan data (input) sampai akhirnya menghasilkan informasi, komputer memerlukan suatu
yang tidak bias terpisahkan. Hardware (perangkat keras) adalah sekumpulan komponen perangakat keras komputer yang secara fisik bisa dilihat, diraba, dirasakan. Hardware ini dibagi menjadi 5 (lima) bagian, yaitu [5]:
a.
b. Process Device, peralatan proses (processor, motherboard, ram),
c. Output Device, peralatan keluaran (Monitor, Printer),
d. Storage Device, peralatan penyimpan (harddisk,flashdisk),
Gambar. 2.1 Personal Computer [5]
2.2. Prinsip Dasar Distorsi Harmonik
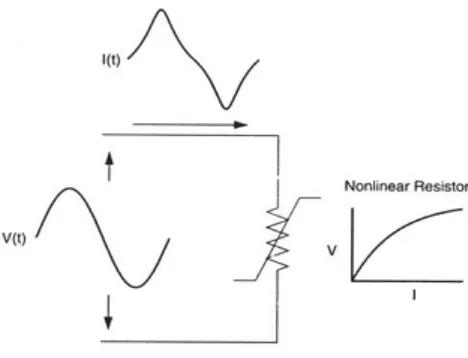
Distorsi harmonik disebabkan oleh peralatan non linear pada sistem tenaga listrik. Peralatan non linear adalah alat yang menyebabkan bentuk gelombang arus
tidak proporsional terhadap gelombang tegangannya [7]. Gambar 2.2 menjelaskan konsep tegangan sinusoidal yang diterapkan pada resistor non linear akan menyebabkan bentuk gelombang antara arus dengan tegangannya berbeda. Bentuk
gelombang tegangan yang diberikan adalah sinusoidal murni sedangkan bentuk gelombang arus yang dihasilkannya adalah sinusoidal yang telah mengalami distorsi.
Gambar 2.2 Distorsi arus akibat beban non linier
Ketika suatu gelombang memiliki bentuk yang identik dari siklus ke siklus, dapat dinyatakan bahwa gelombang tersebut merupakan hasil penjumlahan dari
beberapa gelombang sinusoidal murni yang memiliki frekuensi yang merupakan kelipatan atau hasil perkalian bilangan bulat dari frekuensi gelombang dasar yang
terdistorsi [7]. Gelombang dengan frekuensi kelipatan ini disebut harmonik atau komponen harmonik dari gelombang dasar. Penjumlahan dari gelombang-gelombang sinusoidal tersebut dapat dipecahkan dengan konsep deret fourier [8]. Gambar 2.3
menjelaskan bahwa bentuk gelombang periodik yang terdistorsi dapat diuraikan sebagai suatu jumlah dari gelombang-gelombang sinusoidal [7].
Selanjutnya konsep deret fourier banyak digunakan untuk menganalisa masalah harmonik. Dengan demikian saat ini masalah pada sistem akibat harmonik
terjadi pada sistem akibat setiap harmonik lebih efektif dibandingkan dengan
menganalisa gelombang yang terdistorsi secara keseluruhan. Hasil keluaran dari setiap frekuensi harmonik tersebut kemudian dapat digabungkan kembali untuk mendapatkan suatu deret fourier dimana setelah dilakukan perhitungan, gelombang
keluaran akan dapat ditemukan. Sering kali perhatian tertuju hanya pada besar dari harmonik [8].
Gambar 2.3 Representasi deret fourier dari suatu gelombang terdistorsi [7]
Bentuk tegangan dan arus yang terdistorsi dapat diperoleh dengan
menjumlahkan secara aljabar gelombang dasar (yang dibangkitkan oleh pembangkit) dengan gelombang-gelombang harmonik yang mempunyai frekuensi dan amplitudo
Fourier, arus Is yang non-sinusoidal akan terdiri dari arus fundamental dan komponen
arus yang mengandung harmonisa, dan dinyatakan pada Persamaan (2.1) [8]:
Persamaan Fourier ini dapat digunakan untuk memecah gelombang yang telah
terdistorsi menjadi gelombang dasar dan gelombang harmonik. Hal ini menjadi dasar dalam menganalisa harmonik pada sistem tenaga listrik.
Ketika setengah siklus positif dan negatif pada suatu gelombang memiliki bentuk yang identik, deret fouriernya hanya terdiri atas harmonik ganjil yaitu gelombang harmonik dengan frekuensi kelipatan ganjil dari frekuensi dasarnya. Hal
yang sama pada kedua polaritas. Secara fakta, kehadiran harmonik genap sering kali
menjadi indikator bahwa telah terjadi error, baik itu pada beban yang diukur atau pada transduser alat yang digunakan untuk pengukuran. Meski demikian untuk beberapa hal terdapat pengecualian seperti pada penggunaan penyearah setengah
gelombang dan industri dapur busur [7].
Pada umumnya harmonik orde tinggi (sekitar orde ke-25 hingga ke-50,
tergantung pada sistem) dapat diabaikan untuk analisis sistem tenaga listrik [9]. Meski mereka dapat menyebabkan interferensi terhadap peralatan elektronik berdaya rendah, harmonik orde tinggi tidak akan merusak sistem tenaga listrik. Jika suatu
sistem tenaga listrik digambarkan sebagai komponen-komponen yang tersusun seri dan paralel seperti praktek pada umumnya, peristiwa non linearitas mayoritas terjadi
pada komponen tersusun paralel yaitu pada beban [9]. Impedansi seri dari sistem penyaluran daya listrik, seperti impedansi hubung singkat antara sumber dengan beban, biasanya selalu bersifat linear [9]. Dengan demikian penghasil utama
harmonik yang menyebabkan distorsi harmonik adalah pengguna/pelanggan yang berada di akhir rangkaian sistem. Hal ini bukan berarti semua pengguna yang
mengalami distorsi harmonik adalah merupakan penghasil harmonik, karena secara umum distorsi harmonik adalah sebagai akibat dari kombinasi beban-beban pengguna [9].
2.3. Distorsi Tegangan dan Distorsi Arus
Beban non linear yang biasa terhubung secara paralel tampil sebagai sumber
Pada hampir semua analisis, beban-beban penghasil harmonik ini biasa dianggap
sebagai sumber-sumber arus harmonik [8].
Sebagaimana terlihat pada Gambar 2.4, distorsi tegangan adalah sebagai akibat dari arus terdistorsi melalui impedansi linear yang terpasang seri pada sistem
penyaluran tenaga listrik, meski awalnya bus sumber dianggap sinusoidal murni. Hal ini karena terdapat komponen beban non linear yang menarik arus sehingga
terdistorsi. Arus harmonik yang melalui impedansi sistem menyebabkan tegangan jatuh pada setiap komponen harmonik. Hal ini menyebabkan harmonik tegangan timbul pada komponen beban. Nilai dari distorsi tegangan tergantung dari nilai
impedansi dan juga arusnya [8]. Dengan mengasumsikan nilai distorsi pada komponen beban tetap pada batas wajar (pada kisaran dibawah 5%), nilai dari arus
harmonik yang dihasilkan beban secara umum bernilai konstan [8]. Saat harmonik dari arus beban mutlak mengakibatkan distorsi tegangan, perlu dicatat bahwa beban tersebut tidak memiliki kendali terhadap distorsi tegangan. Dua beban yang sama
ditempatkan pada dua lokasi yang berbeda pada sistem tenaga listrik yang sama maka akan memiliki nilai distorsi tegangan yang berbeda. [8] :
1. Pengendalian terhadap besar arus harmonik yang dihasilkan ke sistem adalah pada beban di sisi hilir.
2. Dengan mengasumsikan nilai arus harmonik yang dihasilkan adalah pada
batas kewajaran, pengendalian terhadap distorsi tegangan dilakukan secara keseluruhan dengan mengendalikan nilai impedansi sistem, yang
Gambar 2.4. Arus yang mengalir melalui beban
Pemaparan fenomena harmonik harus dilakukan secara hati-hati karena terdapat perbedaan antaran penyebab dan akibat dari tegangan dan arus harmonik. Penggunaan istilah harmonik harus memiliki kualifikasi yang jelas. Pada konvensi
yang dikenal secara luas, ketika istilah tersebut digunakan tanpa kata lain mengikutinya, kata harmonik berarti arus harmonik. Namun saat topik pembicaraan
adalah pada utility system maka biasanya subjeknya adalah tegangan harmonik [8].
2.4. Pengaruh Harmonisa
Harmonisa yang diproduksi oleh beban non linier disuntik ke sumber
tegangan sistem. Arus harmonisa tersebut berinteraksi dengan peralatan system yang lebih luas, terutama pada kapasitor, transformator, dan motor, menyebabkan
daya tersebut memutus sendiri, system kendali terkunci dengan sendirinya, dan
banyak lagi permasalahan yang ditimbulkan [8]. Permasalahan ini dapat menyebabkan kerugian keuangan sampai biaya tambahan pemeliharaan. Setiap komponen peralatan sistem distribusi dapat dipengaruhi oleh harmonisa walaupun
dengan akibat yang berbeda. Dengan demikian komponen peralatan tersebut akan mengalami penurunan kinerja dan bahkan akan mengalami kerusakan. Pada keadaan
normal, arus beban setiap fasa dari beban linier yang seimbang pada frekuensi dasarnya akan saling mengurangi sehingga arus netralnya menjadi nol. Sebaliknya beban non linier satu fasa akan menimbulkan harmonisa ganjil kelipatan yang disebut
triplen harmonic (harmonisa ke-3,9,15 dan seterusnya) yang sering disebut
harmonisa urutan nol [10].
Dapat dilihat hasil simulasi pada Gambar 2.5 untuk menjelaskan secara visual agar lebih memahami terjadinya harmonisa urutan nol. Makin besar amplitude harmonisa triplen, maka makin besar harmonisa urutan nol, sehingga akan
memperbesar arus netral sistem. Bentuk gelombang harmonisa dapat dilihat pada Gambar 2.5.
Harmonisa ini tidak mehilangkan arus netral tetapi dapat menghasilkan arus netral yang leih tinggi dari arus fasa. Harmonisa pertama urutan polaritasnya adalah positif, harmonisa kedua urutan polaritasnya adalah negative dan harmonisa ketiga
Gambar 2.5 Bentuk gelombang harmonisa arus urutan nol [10]
Akibat yang dapat ditimbulkan oleh urutan polaritas komponen harmonisa
antara lain tingginya arus netral pada system 3 fasa 4 kawat (sisi sekunder transformator) karena arus urutan nol (zero sequence) dan arus ini akan terinduksi
kesisi primer transformator dan akan berputar pada sisi primer transformator yang biasanya memiliki belitan delta. Hal ini akibat pada kawat netral tidak memiliki peralatan pemutus arus untuk proteksi tegangan atau arus lebih. Pengaruh harmonisa
pada transformator sering tanpa disadari dan diantipasi keberadaannya sampai terjadi gangguan yang penyebabnya tidak jelas. Hal ini dapat juga terjadi bila perubahan
konfigurasi atau jenis beban yang dipasok. Transformator dan peralatan induksi lainnya, selalu terpengaruh oleh harmonisa karena transformator itu sendiri dirancang sesuai dengan frekuensi kerjanya. Selain itu transformator juga merupakan media
daya. Selain itu, ada beberapa akibat yang dapat ditimbulkan oleh adanya harmonisa
dalam sistem tenaga listrik, antar lain:
a. Kegagalan Kapasitor bank disebabkan oleh beban reaktif terlalu besar, sehingga terjadi resonansi, dan mengakibatkan pembesaran amplitude
tegangan harmonisa.
b. Panas berlebihan dan getaran pada motor induksi.
c. Meningkatkan arus urutan negatif pada generator sinkron, dan membahayakan lilitan dan rangkaian rotor generator.
d. Terjadi tegangan lebih pada sistem tenaga sebagai akibat resonansi antara
kapasitor dengan reaktansi induksi sistem.
e. Menurunkan kapasitas daya hantar kabel yang terkait dengan bertambanya
arus pusar, sehingga terjadi panas dan rugi-rugi tembaga akibat efek kulit. f. Kegagalan pemakaian relay kontaktor, terutama sekali pada sistem
terkendali dengan mikroprosesor.
g. Gangguan pada kendali rippel dan metering.
h. Operasi tidak stabil pada rangkaian detaksi zero cross voltage.
i. Gangguan pada sistem aksitasi pembangkit tenaga listrik dan pengontrolan motor yang besar.
j. Harmonisa dapat menimbulkan tambahan torsi pada KWh meter jenis
KWh meter pada harmonisa ke 5 dan 7, karena piringan induksi tersebut
dirancang hanya untuk beroperasi pada frekuensi dasar.
k. Interferensi frekuensi pada sistem telekomunikasi karena biasanya kabel untuk keperluan telekomunikasi berdekatan dengan kawat netral. Triplen
harmonisa pada kawat netral dapat memberikan induksi harmonisa yang menggangu sistem telekomunikasi.
l. Pemutus beban dapat bekerja dibawah arus pengenalan atau mungkin tidak bekerja pada arus pengenal. Pemutus beban yang dapat terhindar dari gangguan harmonisa pada umumnya adalah pemutus beban yang
mempunyai respon terhadap arus RMS sebenarnya (true RMS current) atau kenaikan temperature karena arus lebih.
2.5. Persamaan Harmonisa
Untuk menentukan besar Total Harmonic Distortion (THD) dari perumusan analisa deret fourier untuk tegangan dan arus dalam fungsi waktu yaitu [10]:
………(2.2)
……...……….(2.3)
Tegangan dan arus RMS dari gelombang sinusoidal yaitu nilai puncak gelombang
dibagi √2 dan secara deret fourier untuk tegangan dan arus yaitu [10]:
𝑣(𝑡) =𝑉𝑜+� 𝑉𝑛𝐶𝑜𝑠(𝑛𝜔𝑡+𝜃𝑛)
∞
𝑛=1
𝑖(𝑡) =𝑖𝑜+� 𝐼𝑛𝐶𝑜𝑠(𝑛𝜔𝑡+𝜃𝑛) ∞
………..(2.4)
………..(2.5)
Pada umumnya untuk mengukur besar harmonisa yang disebut dengan Total Harmonic Distortion (THD). Untuk THD tegangan dan arus didefenisikan sebagai
nilai RMS harmonisa urutan diatas frekuensi fundamental dibagi dengan nilai RMS pada frekuensi fundamentalnya, dan tegangan dc nya diabaikan.
Besar Total Harmonic Distortion (THD) untuk tegangan dan arus ditunjukan pada
Persamaan (2.6 dan 2.7) yaitu:
………. (2.6)
……….(2.7)
Persamaan (2.8) menunjukkan hubungan Persamaan THDi dengan arus RMS:
di mana:
Sehingga arus RMS terhadap THDI
………...(2.8) yaitu:
2.6. Interpolasi
Metode numerik adalah teknik-teknik yang digunakan untuk merumuskan masalah-masalah matematika agar dapat diselesaikan dengan operasi-operasi
aritmatika (hitungan) biasa (tambah, kurang, kali, dan bagi). Secara harfiah metode numerik berarti cara berhitung dengan menggunakan angka-angka [11].
Perhitungan ini melibatkan sejumlah besar operasi-operasi hitungan yang
berulang-ulang, melelahkan, dan menjemukan. Tetapi dengan adanya computer digital yang semakin lama semakin cepat dalam melakukan hitungan dan dengan
adanya penemuan metode-metode baru dan beberapa modifikasi dari metode-metode lama, maka penggunaan metode numerik dalam menyelesaikan masalah-masalah matematika mengalami kenaikan secara dramatis. Kemajuan yang cepat pada bidang
metode numerik dikarenakan perkembangan komputer itu sendiri. Kita melihat
perkembangan teknologi komputer tidak pernah berakhir. Keunggulan tiap generasi baru komputer dalam hal waktu, memori, ketelitian, dan kestabilan perhitungan menyebabkan pengembangan algoritma numerik yang lebih baik [17].
Ada beberapa alasan mengapa mempelajari metode numerik, yaitu [11]:
1. Metode numerik merupakan alat untuk memecahkan masalah matematika
yang sangat handal. Banyak permasalahan teknik yang mustahil dapat diselesaikan secara analitik, karena kita sering dihadapkan pada sistem-sistem persamaan yang besar, tidak linear dan cakupan yang kompleks, dapat
diselesaikan dengan metode numerik.
2. Program paket numerik, misalnya MATLAB, MAPLE, dan sebagainya yang
digunakan untuk menyelesaikan masalah matematika dengan metode numeric dibuat oleh orang yang mempunyai dasar-dasar teori metode numerik.
3. Banyak masalah matematika yang tidak dapat diselesaikan dengan memakai
program paket atau tidak tercakup dalam program paket. Oleh karena itu kita perlu belajar metode numerik untuk dapat membuat program paket (software)
untuk masalah sendiri.
4. Metode numerik merupakan suatu sarana yang efisien untuk mempelajari penggunaan komputer.
Ada dua macam penyelesaian masalah matematika, yaitu:
dengan cara yang formal, yaitu dengan menggunakan rumus-rumus yang
sudah lazim dan konvensional sehingga diperoleh solusi eksak. Solusi eksak yaitu solusi dengan galat sama dengan nol.
b. Secara numeric, yaitu dengan menggunakan metode numerik untuk
memperoleh nilai solusi hampiran dari solusi eksak. Cara ini biasanya dilakukan jika nilai eksak sukar dicari dengan cara analisis.
Pada beberapa masalah sering memerlukan suatu penaksiran nilai antara (intermediate values) yaitu suatu nilai diantara beberapa titik data yang telah diketahui nilainya. Metode yang biasa digunakan untuk menentukan titik antara
tersebut adalah melakukan interpolasi. Metode interpolasi yang biasa digunakan adalah dengan interpolasi Polinomial. Persamaan polinomial orde ke n yang dipakai
secara umum dapat dilihat pada Persamaan (2.9) [11]:
n
Persamaan polinomial ini merupakan persamaan aljabar yang hanya
mengandung jumlah dari variabel x berpangkat bilangan bulat (integer). Untuk n+1 titik data, hanya terdapat satu polinomial order n atau kurang yang melalui semua
titik. Misalnya hanya terdapat satu garis lurus (polinomial order satu) yang menghubungkan dua titik, lihat Gambar 2.6, (a). Demikian juga dengan menghubungkan tiga titik dapat membentuk suatu parabola (polinomial order 2), lihat
order tiga, lihat Gambar 2.6 (c). Dengan operasi interpolasi kita dapat menentukan
suatu persamaan polinomial order ke n yang melalui n+1 titik data, yang kemudian digunakan untuk menentukan suatu nilai (titik antara) diantara titik data tersebut [11].
`
(a) (b) (c)
Gambar 2.6. Interpolasi Polinomial (a). orde 2, (b). orde 3, (c). orde n+1 [11]
2.6.1. Teori model matematis polinomial interpolasi metode newton evaluasi dari polynomial.
Meskipun metode Lagrange konseptualnya sederhana, tidak meminjamkan dirinya untuk algoritma yang efisien. Sebuah prosedur komputasi yang lebih baik
diperoleh dengan metode Newton, di mana polinomial interpolasi ditulis dalam bentuk Persamaan (2.10) [11].
𝑃𝑛−1(𝑥) =𝑎1 + (𝑥 − 𝑥1)𝑎2+ (𝑥 − 𝑥1)(𝑥 − 𝑥2)𝑎3
+⋯+ (𝑥 − 𝑥1)(𝑥 − 𝑥2) … (𝑥 − 𝑥𝑛−1)𝑎𝑛...(2.10)
Polinomial ini cocok untuk prosedur evaluasi yang efisien. Perhatikan, misalnya, empat titik data (n = 4). Berikut polinomial interpolasi adalah
●
●
𝑃3(𝑥) =𝑎1+ (𝑥 − 𝑥1)𝑎2+ (𝑥 − 𝑥1)(𝑥 − 𝑥2)𝑎3+ (𝑥 − 𝑥1)(𝑥 − 𝑥2)(𝑥 − 𝑥3)𝑎4
= 𝑎1+ (𝑥 − 𝑥1){𝑎2(𝑥 − 𝑥2)[𝑎3+ (𝑥 − 𝑥3)𝑎4]}
Yang dapat dievaluasi mundur dengan hubungan pengulangan berikut:
𝑃0(𝑥) =𝑎4
𝑃1(𝑥) =𝑎3+ (𝑥 − 𝑥3)𝑃0(𝑥)
𝑃2(𝑥) =𝑎2 + (𝑥 − 𝑥2)𝑃1(𝑥)
𝑃3(𝑥) =𝑎1+ (𝑥 − 𝑥1)𝑃2(𝑥)
Untuk n sembarang diperoleh Persamaan (2.11)
𝑃0(𝑥) =𝑎𝑛 𝑃𝑘(𝑥) =𝑎𝑛−𝑘+ (𝑥 − 𝑥𝑛−𝑘)𝑃1−𝑘(𝑥), 𝑘= 1,2, … ,𝑛 −1….. (2.11)
memperkenalkan perbedaan dibagi
∇𝑦𝑖 = 𝑦𝑥𝑖 − 𝑦1
𝑖 − 𝑥1,𝑖 = 2, 3, … ,𝑛
∇2𝑦
𝑖 = ∇𝑦𝑥𝑖 − ∇𝑦2
𝑖 − 𝑥2 ,𝑖 = 3, 4, … ,𝑛
∇3𝑦 𝑖 = ∇
2𝑦
𝑖 − ∇2𝑦3
𝑥𝑖 − 𝑥3 ,𝑖 = 4, 5, … ,𝑛
⋮
∇
𝑛𝑦
𝑛
=
∇𝑛−1𝑦
𝑛−∇𝑛−1𝑦𝑛−1
solusi dari Persamaan. (𝑎) adalah
𝑎1 =𝑦1 𝑎2 =∇𝑦2 𝑎3 = ∇2𝑦3⋯ 𝑎𝑛 =∇𝑛𝑦𝑛………..(2.13)
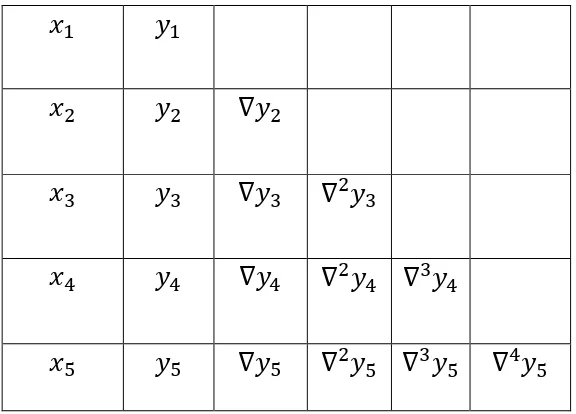
jika koefisien dihitung dengan tangan, akan lebih mudah untuk bekerja dengan format dalam Tabel 2.1 (ditampilkan hanya untuk n = 5).
Tabel 2.1 Format perhitungan koefisien yang dihitung dengan tangan
𝑥
1𝑦
1𝑥
2𝑦
2∇𝑦
2𝑥
3𝑦
3∇𝑦
3∇
2𝑦
3𝑥
4𝑦
4∇𝑦
4∇
2𝑦
4∇
3𝑦
4𝑥
5𝑦
5∇𝑦
5∇
2𝑦
5∇
3𝑦
5∇
4𝑦
5istilah diagonal 𝑦1,∇𝑦2,∇2𝑦3,∇3𝑦4,𝑑𝑎𝑛∇4𝑦5 dalam Tabel adalah koefisien akan berubah, tetapi polinomial yang dihasilkan akan sama-ingat bahwa polinomial derajat
n-1 interpolasi titik data n yang berbeda adalah unik. Awalnya, mengandung y-nilai
data, sehingga identik dengan kolom kedua pada Tabel 2.1. setiap melewati loop
![Gambar 2.6. Interpolasi Polinomial (a). orde 2, (b). orde 3, (c). orde n+1 [11]](https://thumb-ap.123doks.com/thumbv2/123dok/3889547.1852047/17.612.131.490.211.368/gambar-interpolasi-polinomial-orde-orde-orde.webp)