ASBTRACT
THE DEVELOPMENT OF AUTOPILOT SYSTEM FOR UNMANNED AERIAL VEHICLE ( UAV ) FIXED WING PROTO-03
By Aris Susilo
The Unmanned Aerial Vehicle (UAV) is an alternative of manned aircraft for aerial photography purposes. The flight accuracy is absolutely done to create high quality of aerial photography based on the coordinates of area which will be taken. Ardupilot Mega is autopilot open source system which had used for the UAV. The development of autopilot system is required in order to have a good flying ability vehicle.
The development of autopilot system was devided into 3 parts. First, the configuration of autopilot and supporting electronic devices for UAV. Second, the software configuration was firmware installation, sensor calibration and setting up the value of Proportional Integrative Derivative (PID). And third was flight test to ensure every configuration ran well and knew the error of vehicle track.
The result of flight test shown that the ideal distance among waypoint spots were 20 meters with 5 meters radius. The vehicle track at the time of flight mission had the average error which was more than 1 meter for each flight session. The vehicle could keep the flight altitude based on fligh t plan which was 50 meters above ground level. Radio telemetry succeed sending the data of vehicle during a flight with RSSI ( Received Signal Strength Indicator ) in the amount of 90 % for each flight session with the longest distance was 1 km.
PENGEMBANGAN SISTEM AUTOPILOT PADA WAHANA UDARA TANPA AWAK FIXED WING PROTO-03
Oleh Aris Susilo
Wahana udara tanpa awak (WUT) merupakan alternatif dari pesawat berawak untuk keperluan foto udara. Keakuratan dalam penerbangan sangat mutlak dilakukan untuk menghasilkan foto udara berkualitas yang sesuai dengan titik koordinat daerah yang akan difoto. ArdupilotMega merupakan sistem autopilot open source yang telah banyak digunakan untuk wahana udara tak berawak, pengembangan sistem autopilot sangat diperlukan agar wahana memiliki kemampuan terbang yang baik.
Pengembangan sistem autopilot terbagi menjadi tiga bagian yaitu : (1) konfigurasi perangkat keras autopilot dan perangkat elektronik penunjang pada wahana udara; (2) Konfigurasi perangkat lunak yaitu pemasangan firmware, kalibrasi sensor dan pengaturan nilai Proportional Integrative Derivative (PID); (3) Uji terbang untuk memastikan setiap konfigurasi berjalan baik dan mengetahui eror lintasan wahana.
Hasil uji terbang menunjukkan bahwa jarak ideal antar titik waypoint adalah 20 meter dengan radius 5 meter. Lintasan wahana pada saat misi terbang memiliki error rata-rata lebih dari 1 meter pada setiap sesi penerbangan. Wahana dapat mempertahankan ketinggian terbang sesuai dengan flight plan yaitu 50 meter diatas permukaan tanah. Radio telemetry sukses mengirimkan data sikap wahana selama penerbangan dengan RSSI (Received Signal Strength Indicator) sebesar 90% pada setiap sesi penerbangan dengan jarak terjauh adalah 1 km.
PENGEMBANGAN SISTEM AUTOPILOT PADA WAHANA UDARA TANPA AWAK FIXED WING PROTO-03
Oleh Aris Susilo
Skripsi
Sebagai Salah Satu Syarat untuk Mencapai Gelar SARJANA TEKNIK
Pada
Jurusan Teknik Elektro
Fakultas Teknik Universitas Lampung
FAKULTAS TEKNIK UNIVERSITAS LAMPUNG
DAFTAR GAMBAR
Gambar 2.1. WUT BKP-001 sedang melakukan misi surveillance dan dropping
payload [7] ... 9
Gambar 2.2. Foto Udara Penambangan Pasir Liar [7] ... 10
Gambar 2.3. Bagian-bagian Dari WUT BKP-001 [7] ... 11
Gambar 2.4. APM 2.5 board ... 12
Gambar 2.5.Mission planner ... 13
Gambar 2.6. Nama-nama bagian pesawat ... 14
Gambar 2.7. Kendali pada sayap ... 15
Gambar 2.8. Jaringan satelit [9]... 17
Gambar 2.9. Format NMEA (level TTL dan RS232)... 18
Gambar 2.10. Spesifikasi penerima GPS Ublox Neo-6M ... 20
Gambar 2.11. Struktur umum radio telemetri... 20
Gambar 2.12. XTend dalam bentuk modul ... 21
Gambar 2.13. 9XTendTM PKG-U ... 22
Gambar 2.14. Konstruksi motor servo... 23
Gambar 2.15. Lebar pulsa dan posisi servo motor ... 23
Gambar 2.16. Tiga kumparan stator tiga fasa dan stator motor DC [16] ... 24
Gambar 2.17.Brushless motor, ESC, receiver dan baterai ... 24
Gambar 2.18. Sistem mekanikal pada gyroscope [18] ... 25
Gambar 2.20. Sensor barometer MS5611-01BA03 [20] ... 27
Gambar 2.21. Sensor magnetometer HMC5883L [21] ... 28
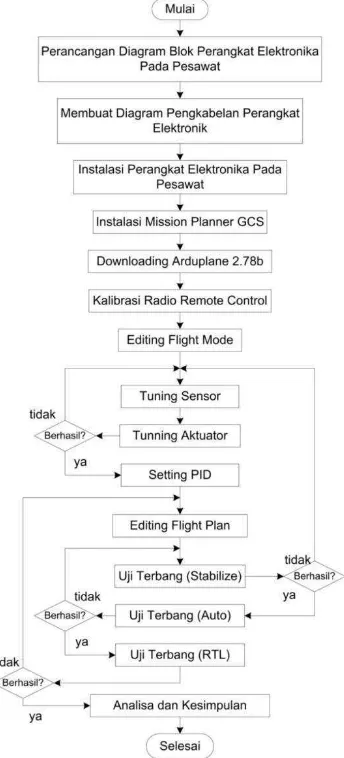
Gambar 3.1. Diagram alir penelitian ... 32
Gambar 3.2. Diagram blok komponen sistem autopilot ... 33
Gambar 3.3. Sistem nirkabel radio kontrol dan GCS ... 34
Gambar 3.4. Koneksi umum sistem autopilot pada pesawat ... 35
Gambar 3.5. Mission planner setup wizard ... 36
Gambar 3.6. Pin input-output APM 2.5 [22] ... 37
Gambar 3.7.Pin out Maxstream-9XTend [1]... 40
Gambar 3.8. Rangkaian 6 position switch ... 41
Gambar 3.9. PID pada kontrol roll ... 44
Gambar 3.10. PID pada kontrol pitch ... 44
Gambar 3.11. PID pada kontrol yaw ... 44
Gambar 3.12. PID pada kontrol altitude... 45
Gambar 4.1. Tata letak perangkat elektronik ... 47
Gambar 4.2. Tata letak perangkat penunjang ... 49
Gambar 4.3.Ground Control Station ... 50
Gambar 4.4. Turnigy 9X dan enam flight mode switch ... 51
Gambar 4.5. (a). Roll kekanan 45º. (b). Roll kekiri 45º ... 53
Gambar 4.6. (a). Nose up 20º. (b). Nose down 20º ... 54
Gambar 4.7. (a). Compass 90º. (b). Compass 60º ... 55
Gambar 4.8. Akurasi GPS 5 meter ... 56
Gambar 4.9. Posisi dan kuat sinyal satelit GPS dilangit ... 57
Gambar 4.11. Posisi dan kuat sinyal satelit GPS dilangit ... 59
Gambar 4.12. Pengiriman data serial ... 60
Gambar 4.13. Lokasi uji terbang pada Google Earth Pro ... 61
Gambar 4.14. Konstanta PID default ... 62
Gambar 4.15.Throttle cruise ... 63
Gambar 4.16. Edit flight plan ... 63
Gambar 4.17. GPS trackingmission planner ... 64
Gambar 4.18. GPS Tracking pada Google Earth Pro ... 65
Gambar 4.19. GPS tracking dengan titik waypoint ... 66
Gambar 4.20. Grafik eror radius uji terbang misi pertama sesi pertama ... 67
Gambar 4.21. Edit Flight plan ... 68
Gambar 4.22. GPS Tracking Mission Planner ... 69
Gambar 4.23. GPS Tracking pada Google Earth Pro ... 69
Gambar 4.24. GPS tracking dengan titik waypoint ... 70
Gambar 4.25. Grafik eror radius uji terbang misi pertama sesi kedua ... 72
Gambar 4.26.Edit Flight plan ... 73
Gambar 4.27. GPS tracking Mission Planner ... 74
Gambar 4.28. GPS Tracking pada Google Earth Pro ... 75
Gambar 4.29. GPS tracking dengan titik waypoint ... 76
Gambar 4.30. Grafik eror radius uji terbang misi pertama sesi ketiga ... 78
Gambar 4.31. Edit Flight plan ... 79
Gambar 4.32. Konstanta PID default ... 80
Gambar 4.33.Throttle cruise ... 80
Gambar 4.35. GPS Tracking pada Google Earth Pro ... 81
Gambar 4.36. GPS tracking dengan titik waypoint ... 82
Gambar 4.37. Grafik eror radius uji terbang misi kedua sesi pertama ... 86
Gambar 4.38. Konstanta PID misi kedua sesi kedua ... 87
Gambar 4.39. GPS tracking Mission Planner ... 87
Gambar 4.40. GPS Tracking pada Google Earth Pro ... 88
Gambar 4.41. GPS tracking dengan titik waypoint ... 89
Gambar 4.42. Grafik eror radius uji terbang misi kedua sesi kedua ... 92
Gambar 4.43. Konstanta PID misi kedua sesi ketiga ... 93
Gambar 4.44. GPS Tracking Mission Planner ... 94
Gambar 4.45. GPS Tracking pada Google Earth Pro ... 95
Gambar 4.46. GPS tracking dengan titik waypoint ... 95
Gambar 4.47. Grafik eror radius uji terbang misi kedua sesi ketiga ... 98
DAFTAR ISI
2.2 Wahana Udara Tak Berawak (WUT) ... 9
2.2.1 Pengertian dan Manfaat WUT ... 9
2.2.2 Bagian-Bagian Penyusun WUT ... 10
2.3 ArdupilotMega 2.5 Autopilot (APM 2.5) [8]... 11
2.3.1. Pengertian Sistem ... 11
2.3.2. Controller board ... 12
2.3.3. Ground Control Station (GCS) ... 13
2.4 Pesawat Model ... 14
2.4.2. Teori Kendali Pergerakan ... 15
2.4.3. Pesawat Model 4 Channel Fixed Wing Proto-03 ... 16
2.5 Global Positioning System (GPS) ... 17
2.5.1 Format Data GPS [11] ... 17
2.5.2 Penerima GPS uBlox Neo 6-M [12] ... 19
2.6 Radio Telemetri ... 20
2.9 Inertia Measuring Unit (IMU) MPU 6000 [17] ... 25
a. Gyroscope ... 25
b. Accelerometer ... 26
2.10 Barometric Pressure Sensor ... 27
2.11 Magnetometer ... 28
2.12 Proportional Integrative Derivative (PID) ... 28
a. Kontrol Proporsional ... 28
3.2.2. Pembuatan Diagram Alir Penelitian... 32
3.2.3. Diagram Blok Komponen Sistem Autopilot ArdupilotMega 2.5 .... 33
3.2.4. Sistem Interkoneksi AutopilotMega 2.5 ... 34
3.2.5. Instalasi Mission Planner GCS ... 36
3.2.7. Konfigurasi Kontrol Autopilot ... 41
3.2.8. Pengujian ... 45
IV. HASIL DAN PEMBAHASAN ... 47
4.1 Hasil ... 47
4.1.1 Hasil Instalasi Hardware ... 47
4.1.2 Uji Sensor dan Telemetry... 52
4.1.3 Uji Terbang ... 61
4.1.4 Hasil Foto Udara ... 99
4.2 Pembahasan ... 101
4.2.1 Uji Terbang Misi Pertama ... 102
4.2.2 Uji Terbang Misi Kedua... 105
V. KESIMPULAN DAN SARAN ... 107
DAFTAR TABEL
Tabel 2.1. Penjelasan fungsi karakter dari set data NMEA ... 19
Tabel 3.1. Deskripsi pin out crius uBlox neo 6-M ... 39
Tabel 3.2. Deskripsi pin out MaxStream 9XTend [1] ... 40
Tabel 4.1. Eror radius uji terbang misi pertama sesi pertama ... 66
Tabel 4.2. Eror radius uji terbang misi pertama sesi kedua... 71
Tabel 4.3. Eror radius uji terbang misi pertama sesi ketiga ... 76
Tabel 4.4. Eror radius uji terbang misi kedua sesi pertama... 83
Tabel 4.5. Eror radius uji terbang misi kedua sesi kedua ... 89
“Selalu ada harapan bagi mereka yang sering
berdoa, selalu ada jalan bagi mereka yang
RIWAYAT HIDUP
Penulis dilahirkan di Bandar Lampung pada tanggal 11 Januari
1990, sebagai anak pertama dari dua bersaudara dari pasangan
Bapak Paiman dan Ibu Sri Handayani. Pendidikan di Sekolah
Dasar di SDN 9 Kalianda diselesaikan pada tahun 2002,
Sekolah Lanjutan Tingkat Pertama di SLTPN 1 Kalianda
diselesaikan pada tahun 2005 dan Sekolah Menengah Kejuruan di SMK 2
Kalianda dengan mengambil jurusan Teknik Elektro diselesaikan pada tahun
2008.
Pada tahun 2008, penulis terdaftar sebagai mahasiswa Jurusan Teknik Elektro
Fakultas Teknik Universitas Lampung melalui jalur SNMPTN (Seleksi Nasional
Masuk Perguruan Tinggi Negeri). Selama menjadi mahasiswa penulis aktif di
lembaga kemahasiswaan Himatro (Himpunan Mahasiswa Teknik Elektro) sebagai
anggota Departemen Infokom (Informasi dan Komunikasi) tahun 2010-2011.
Selain itu penulis juga menjadi asisten laboratorium Teknik Digital. Selain
sebagai asisten penulis juga tergabung dalam pusat unggulan URO (Unila
Robotika dan Otomasi) dan telah mengikuti berbagai macam perlombaan tingkat
regional dan nasional, diantaranya divisi KRI (Kontes Robot Indonesia) tahun
SANWACANA
Alhamdulillah, puji syukur penulis panjatkan kehadirat Allah Subhanahu Wa
Ta’ala atas segala karunia, hidayah, serta nikmat yang diberikan sehingga penulis
dapat menyelesaikan skripsi tugas akhir yang berjudul “Pengembangan Sistem
Autopilot Pada Wahana Udara Tanpa Awak Fixed Wing Proto-03”.
Penyusunan skripsi merupakan syarat memperoleh gelar Sarjana Teknik pada
Jurusan Teknik Elektro Fakultas Teknik Universitas Lampung.
Dalam penyusunan skripsi ini penulis banyak mendapat bantuan baik ilmu,
petunjuk, bimbingan dan saran dari berbagai pihak terutama kepada dosen
pembimbing dan penguji, penulis ucapkan terimakasih. Ucapan terimakasih yang
tak terhingga penulis ucapkan kepada Bapak almarhum Yuliarto Raharjo, S.T.,
M.T. beliau adalah dosen, pembimbing dan sekaligus teman ngobrol saat-saat
aktif membina Unila Robotika dan Otomasi. Terkenang moment saat ngobrol
dilab membicarakan pembuatan pesawat model, saat-saat latihan terbang dalam
rangka persiapan lomba dan saat membahagiakan pada pengumuman pemenang
pada Kontes Robot Terbang Indonesia 2013 di jatinangor, pelukan dan rasa haru
mengiringi perolehan gelar juara umum saat itu, moment yang tak terlupakan
sampai kapanpun. Terimakasih telah menjadi figur ayah dan teman yang baik
untuk kami seluruh anggota URO, semoga amal baik Bapak diterima dan semoga
M.Sc. sebagai Dosen pembimbing atas ilmu, saran dan waktu yang diberikan
untuk pengerjaan penelitian ini. Banyak waktu yang penulis buang dengan sia-sia
sehingga pengerjaan skripsi ini menjadi sangat lama. Selamat atas terpilihnya
Bapak menjadi Kepala Jurusan Teknik Elektro Unila, semoga Bapak diberi
kekuatan oleh Allah untuk dapat menjalankan tugas dengan baik dan amanah.
Kepada Bapak Syaiful Alam, S.T., M.T. sebagai dosen pembimbing penulis
ucapkan terimakasih atas saran-saran yang membangun untuk pengerjaan
penelitian ini. Ucapan terimakasih tak lupa pula penulis ucapkan kepada Bapak
M. Komarudin, S.T., M.T. sebagai Dosen Penguji, terimakasih atas ilmu, saran
dan kritik yang membangun dalam pengerjaan penelitian ini.
Tak lupa penulis ucapkan rasa terimakasih kepada seluruh dosen mata-kuliah
Jurusan Teknik Elektro atas semua ilmu, didikan, dan bimbingan yang penulis
peroleh selama perkuliahan. Staf administrasi, terima kasih untuk bantuannya
selama ini.
Emak dan Bapak dirumah terimakasih atas semua jerih payah dan doanya
sehingga penulis mampu menyelesaikan tugas akhir ini. Adikku tercinta Candra
Puspika, Rini Hardiyanti Afifah dan seluruh keluarga besar yang tidak dapat
disebut satu-persatu, atas segala kasih sayang, perhatian, dukungan dan
pengorbanan selama penulis menyelesaikan kuliah.
Teman-teman di Unila Robotika dan Otomasi (URO) , Kak Iman, Kak Beny,
Dana, Dexy, Deni Tukul, Nyo, Supri, Hendi, Dimas, Songkot, Ucup, Hari, Gata,
URO lebih berprestasi dari yang sekarang ini.
Teman-teman angkatan 2008, terimakasih telah mengisi hari-hari selama kuliah,
saat susah maupun senang dan semoga tali silaturahmi dapat terjalin meskipun
kita tidak lagi mengikuti perkuliahan seperti dulu.
Semua pihak yang telah membantu serta mendukung Penulis dalam segala hal
yang tidak dapat disebutkan satu per satu dan rekan-rekan Teknik Elektro yang
telah membantu serta mendukung penulis dari awal hingga akhir perkuliahan.
Semoga Allah Subhanahu wata’ala membalas dengan kebaikan.
Bandar Lampung, 25 Januari 2016 Penulis
I. PENDAHULUAN
1.1. Latar Belakang
Wahana udara tanpa awak (WUT) merupakan alternatif dari pesawat berawak
untuk banyak keperluan penerbangan baik dibidang militer maupun sipil.
Dibandingkan dengan wahana udara berawak, wahana udara tak berawak dapat
memberikan keunggulan yang signifikan pada keselamatan manusia, pengurangan
biaya operasional, dan efisiensi kerja. Penyebaran agrikultur, pengawasan
teritorial, pengawasan lingkungan, kerja polisi, kendali lalu lintas jalan raya,
pengawasan area berbahaya, area bencana atau area yang terkontaminasi, dan
pemetaan daerah merupakan aplikasi yang sangat menjanjikan untuk wahana
udara yang dikendalikan dari jauh.
Universitas Lampung dengan pusat kajian teknis unggulannya, Unila Robotika
dan Otomasi (URO), saat ini sedang mengembangkan pemanfaatan foto udara
yang berfokus pada bidang pertanian dan perkebunan. Pemanfaatan ini sebagian
besar digunakan untuk memeriksa tingkat kesuburan tanaman dan pemetaan
daerah penyebaran tanaman seperti pada perkebunan kelapa sawit dan karet.
Pengambilan foto udara tersebut menggunakan pesawat aeromodelling yang telah
akurat mengikuti titik koordinat waypoint yang telah ditentukan pada mission
planner.
Keakuratan dalam penerbangan sangat mutlak dilakukan untuk menghasilkan foto
udara berkualitas yang sesuai dengan titik-titik koordinat daerah yang akan difoto.
Keakuratan penerbangan ini dilakukan oleh sistem autopilot ArdupilotMega 2.5
(APM 2.5) dengan bantuan perangkat lunak Arduplane dan sensor-sensor
pendukung seperti gyro, accelerometer, magnetometer, barometer dan Global
Positioning System (GPS). Agar mendapatkan kinerja optimal dari sistem
autopilot tersebut dibutuhkan proses pengembangan dan konfigurasi pada WUT
yang sesuai dengan prosedur. Proses pengembangan ini meliputi pemasangan
board autopilot ArdupilotMega 2.5 dan GPS kemudian dilanjutkan dengan proses
konfigurasi perangkat keras dan perangkat lunak. Konfigurasi perangkat keras
yaitu pemasangan perangkat elektronik penunjang pada wahana udara.
Sedangkan konfigurasi perangkat lunak meliputi pemasangan firmware, kalibrasi
magnetometer, gyro, accelerometer, barometer dan pengaturan nilai Proportional
Integrative Derivative (PID) untuk setiap flight mode. Setelah konfigurasi selesai,
untuk mengetahui kinerja sistem autopilot diperlukan uji terbang yang
menggunakan tiga flight mode yaitu stabilize, auto dan Return to Launch (RTL).
Pada mode stabilize, wahana dikontrol oleh pilot dengan stabilisasi. Mode auto,
pesawat akan mengikuti GPS waypoint yang ditetapkan oleh utilitas konfigurasi.
Mode RTL, pesawat akan kembali ke titik peluncuran dan terbang melingkar
sampai kontrol stabilize kembali. Pengembangan dan konfigurasi dapat dikatakan
berhasil apabila dalam ujicoba, pesawat model dapat terbang sesuai dengan tiga
1.2. Tujuan
Tujuan dari penelitian dalam tugas akhir ini adalah mengembangkan sistem
autopilot menggunakan ArdupilotMega 2.5, dan mengkonfigurasikan perangkat
lunak dan perangkat keras autopilot tersebut pada sebuah pesawat aeromodelling,
sehingga pesawat model tersebut dapat diterbangkan secara otomatis mengikuti
titik-titik waypoint yang telah ditentukan dan dapat mengirimkan data telemetri
pada saat terbang.
1.3. Manfaat Penelitian
Penelitian ini diharapkan menjadi panduan bagi penelitian dan pengembangan
lebih lanjut wahana udara tanpa awak dengan sistem autopilot khususnya yang
menggunakan ArdupilotMega 2.5, dalam rangka memenuhi kebutuhan teknis dan
pencapaian tujuan pusat kajian Unila Robotika dan Otomasi (URO)
1.4. Perumusan Masalah
Walaupun teknologi pengendalian WUT terus berkembang dalam beberapa tahun
terakhir, akan tetapi metodologi pengendali utama tetap berupa radio remote dan
terprogram. Jika komunikasi link tidak dipercepat atau tidak dapat diandalkan,
maka mode radio kendali jarak jauh tidak akan memiliki efek apapun. Meskipun
mode pengendali kemudian dapat melepaskan diri dari pembatasan link
situasi yang direncanakan pada awal penerbangan berubah. Bahkan kombinasi
dari dua metodologi ini tidak dapat memberikan solusi terhadap suatu situasi di
bawah lingkungan yang tidak pasti. Hal ini menunjukkan bahwa teknologi saat
ini sudah memadai untuk otomatisasi WUT yang beroperasi dalam kondisi
lingkungan yang relatif terstruktur. Akan tetapi untuk WUT yang berada pada
kondisi lingkungan yang tidak pasti atau berubah dengan cepat, maka
teknik-teknik pengendalian yang ada saat ini tidak memadai. Dengan demikian,
pengendali autopilot yang otonom dan responsif bagi WUT menjadi sangat
diperlukan.
1.5. Batasan Masalah
Adapun pembatasan masalah dalam penelitian ini adalah seperti diuraikan di
bawah ini:
1. Pengembangan dan konfigurasi difokuskan untuk penggunaan
ArdupilotMega 2.5 pada WUT dengan tipe sayap fixed wing Proto-03.
2. Sistem Ground Control Station (GCS) yang digunakan pada penelitian ini
adalah Mission Planner.
3. Pada penelitian ini menggunakan konfigurasi telemetri dengan daya 1 Watt,
baudrate 57000 bit perdetik dan frekuensi 900MHz.
4. Pengembangan dan konfigurasi ArdupilotMega 2.5 pada tugas akhir ini
dibatasi hingga untuk tujuan penerbangan pesawat secara otomatis pada mode
5. Parameter keberhasilan pengembangan dan konfigurasi autopilot dalam tugas
akhir ini adalah pesawat dapat terbang dengan tiga flight mode yaitu stabilize,
auto, RTL sesuai dengan flight plan dan dapat mengirimkan hasil telemetri
kepada GCS (Ground Control Station).
6. Dalam uji penerbangan pesawat, mode auto hanya digunakan saat pesawat
sedang mengudara, saat takeoff dan landing pengontrolan menggunakan mode
stabilize.
1.6. Sistematika Penulisan
Untuk memudahkan penulisan dan pemahaman mengenai materi tugas akhir ini,
maka tulisan akan dibagi menjadi lima bab, yaitu:
BAB I PENDAHULUAN
Memuat latar belakang, tujuan, perumusan masalah, batasan masalah,
manfaat, dan sistematika penulisan.
BAB II TINJAUAN PUSTAKA
Berisi teori-teori yang mendukung dalam perancangan dan
implementasi dalam pembuatan sistem.
BAB III METODE PENELITIAN
Berisi rancangan dan realisasi rangkaian sistem meliputi alat dan
spesifikasi rangkaian, blok diagram rangkaian, cara kerjanya, dan
penjelasan masing-masing bagian blok diagram.
BAB IV HASIL DAN PEMBAHASAN
Berisikan tentang penjelasan mengenai prosedur pengujian, hasil
pengujian dan analisis terhadap data-data hasil pengujian yang
diperoleh.
BAB V SIMPULAN DAN SARAN
Bab ini berisi simpulan semua kegiatan dan hasil-hasil yang diperoleh
selama proses pembuatan dan pengujian sistem serta saran-saran yang
sekiranya diperlukan untuk menyempurnakan penelitian yang akan
II. TINJAUAN PUSTAKA
2.1 Kajian Pustaka
Pengembangan sistem autopilot pada wahana udara tanpa awak (WUT) telah
menjadi topik penelitian yang menarik, baik dikalangan akademisi maupun
praktisi. Instalasi dan konfigurasi paparazzi autopilot tiny13 v1.1 pada pesawat
model wing dragon telah dilakukan pada [1]. Pada penelitian ini, dilakukan
proses instalasi dan konfigurasi Paparazzi Autopilot pada pesawat model. Proses
dimulai dengan instalasi software Paparazzi, simulasi software Paparazzi,
instalasi hardware pada pesawat model, konfigurasi airframe, pengeditan Flight
plan. Pengujian terbagi menjadi dua, yaitu uji tunning dan uji terbang. Hasil uji
tunning yang didapat menyatakan bahwa tidak ada masalah pada hasil instalasi
dan konfigurasi Paparazzi Autopilot. Pada saat uji terbang, pesawat berhasil
diterbangkan secara manual, mode Auto1, dan hingga mode Auto2. Berdasarkan
tampilan Grafik User Interface (GUI) pada Ground Control Station (GCS) data
telemetri dapat diterima dengan baik [1].
Pada literatur lainnya [2], dikembangkan rancang bangun sistem manual pilot
menggunakana joystick Logitech dan sistem autopilot pada wahana udara tak
berawak. Pada penelitian ini, sistem terdiri dari hardware berupa perangkat data
yang mendapatkan data dari kontroler dan pengolah data joystick. Berdasarkan
hasil pengujian, wahana sudah dapat dikendalikan secara manual pilot dengan
joystick. Sedangkan sistem autopilot belum sempurna pada algoritma menuju
titik waypoint, sistem penjejakan yang dilengkapi dengan instrumentasi avionic
pada GCS sudah dapat digunakan dengan baik [2].
Sistem kendali holding position pada quadcopter berbasis mikrokontroler atmega
328p oleh Muhammad Rizky Wiguna Utama pada tahun 2013. Penelitian ini
membahas tentang sistem kendali holding position pada quadcopter yang sesuai
dengan koordinat terbang yang ditentukan. Hasil penelitian ini adalah quadcopter
mampu mempertahankan posisi (holding position) ketika mode holding position
dan mampu mengirim data telemetri ke GCS dalam bentuk GUI melalui radio
frekuensi 900Mhz [3].
Rancang bangun tracking antenna 2.4GHz untuk komunikasi data video antara
WUT dengan ground station oleh K.A Iqbal Apriansyah. Penelitian ini
diharapkan video output pada ground station menjadi jernih pada saat WUT
melaksanakan misi. Dari hasil pengujian keseluruhan sistem, didapat bahwa
sistem masih belum dapat bekerja sesuai dengan yang di harapkan karena sistem
tracking antenna tidak dapat berkesinambungan (continue) mengikuti transmitter
yang bergerak [4].
Sistem penjejakan wahana udara tak berawak pada sistem informasi geografi di
Bandar Lampung oleh Sherly mardiana S. Penelitian ini bertujuan untuk
menyediakan sebuah sistem informasi geografis yang bisa diintegrasikan dengan
menggunakan GPS, diketahui peta dasar hasil pemindaian memiliki banyak
penyimpangan kesesuaian dengan kondisi geografis yang sebenarnya dan hasil
penjejakan pun menjadi tidak akurat [5].
2.2 Wahana Udara Tanpa Awak (WUT) 2.2.1 Pengertian dan Manfaat WUT
WUT merupakan wahana udara tanpa awak yang salah satu pengoperasiannya
dengan cara dikendalikan dari jarak jauh. Pada dasarnya pesawat, atau helikopter
dapat dipertimbangkan untuk menjadi kendaraan udara yang dapat melakukan
misi yang berguna dan dapat dikendalikan dari jauh atau memiliki kemampuan
terbang secara otomatis [6]. Model wahana udara tak berawak dengan tipe fixed
wing dapat dilihat pada gambar 2.1.
Gambar 2.1. WUT BKP-001 sedang melakukan misi surveillance dan dropping payload [7]
Berikut ini adalah beberapa contoh manfaat WUT untuk kepentingan
a. Pengawasan hutan dapat dilakukan secara berlanjut dan terus menerus,
sehingga dapat mengurangi kegiatan pembalakan liar. Dengan WUT kita juga
bisa melihat daerah-daerah terjadinya kebakaran hutan.
Gambar 2.2. Foto Udara Penambangan Pasir Liar [7]
b. Peristiwa bencana alam yang terjadi dapat dipantau, baik bencana alam yang
sedang terjadi ataupun kerusakan-kerusakan yang ditimbulkan oleh bencana
alam. Gambar 2.2. merupakan hasil foto udara penambangan pasir liar yang
dilakukan oleh tim UAV-URO.
2.2.2 Bagian-Bagian Penyusun WUT
Secara umum sistem WUT dibentuk oleh beberapa bagian yang saling
berinteraksi, seperti pesawat, dan GCS. Adapun bagian penyusun WUT dapat
Gambar 2.3. Bagian-bagian Dari WUT BKP-001 [7]
2.3 ArdupilotMega 2.5 Autopilot (APM 2.5) [8] 2.3.1. Pengertian Sistem
ArdupilotMega merupakan sistem autopilot source terbuka (open source) yang
termasuk di dalamnya GCS yang memanfaatkan bidirectional datalink untuk
telemetri dan pengendalian.
Berikut ini adalah fitur-fitur dari ArdupilotMega 2.5 yaitu :
a. Proses setup sederhana dan firmware pemuatan melalui utilitas
b. Perangkat lunak open source yang gratis datang dalam versi yang berbeda
yang mendukung pesawat (ArduPlane), multicopters (quads, hex, Octo) dan
helikopter (ArduCopter), dan rovers tanah (ArduRover).
c. Pilihan stasiun tanah gratis yang meliputi perencanaan misi di udara
pengaturan parameter, tampilan video on-board, dan datalogging.
2.3.2. Controller board
Controller board ini didesain menggunakan mikrokontroller ATmega 2560
sebagai main prossesor dan Atmega 32u sebagai universal serial bus (USB)
interface.
Gambar 2.4. dapat dilihat bahwa board ini terdiri dari sensor 3 axis gyro, 3 axis
accelerometer, pressure, dan magnetometer. Sensor gyro dan accelerometer
tergabung dalam satu buah chip integrated circuit (IC) yaitu MPU 6000. Board
ini juga dilengkapi dengan 4 MB memoryflash untuk data logger.
2.3.3. Ground Control Station (GCS) a. Ground Computer
Software Mission planner dikembangkan dengan menggunakan Microsoft visual
studio, untuk menjalankannya membutuhkan komputer dengan windows .net
Framework 3.5+ dan directX. Mission planner tidak membutuhkan spesifikasi
computer yang tinggi karena software pada saat dijalankan hanya memakai
memori yang kecil.
b. Ground Software
Mission planner merupakan perangkat lunak desktop yang digunakan untuk
mengelola APM dan rencana misi, serta menjadi Ground Control Station yang
kuat selama penerbangan dan membantu menganalisis log misi sesudahnya.
Gambar 2.5. merupakan tampilan GUI dari mission planner yang akan dipakai
pada penelitian ini.
2.4 Pesawat Model
2.4.1. Arsitektur Secara Umum
Seperti halnya pesawat modern, pesawat model memiliki 5 struktur komponen
dasar: fuselage, sayap, empennage (struktur ekor), power plant (sistem
pendorong) dan undercarriage. Fuselage merupakan struktur badan utama
dimana semua komponen pendukung terpasang.
Gambar 2.6. Nama-nama bagian pesawat
Gambar 2.6. memberikan gambaran umum tentang bagian-bagian dari pesawat
terbang. Sayap merupakan bagian terpenting dalam menghasilkan gaya angkat
pada pesawat. Sayap berbeda dalam perancangannya tergantung kepada tipe
pesawat dan kegunaannya. Empennage disusun dari dua bagian utama yaitu fin
(penstabil vertikal) dimana Rudder menempel, dan penstabil horisontal dimana
elevator menempel. Undercarriage atau roda mendarat yang terdiri dari roda dan
rem. roda mendarat dapat tetap disuatu tempat atau dapat dikeluarkan dan
dimasukkan. Power plant disusun oleh sistem pendorong yang terdiri dari mesin.
2.4.2. Teori Kendali Pergerakan
Kendali Permukaan Pada Sayap Pesawat
Gambar 2.7. merupakan gambar tampilan permukaan pesawat secara umum
beserta bagian-bagian yang berkaitan dengan pengendalian permukaan sayapnya.
Gambar 2.7. Kendali pada sayap
Aileron
Kedua aileron yang berada pada sayap kanan dan kiri pesawat berfungsi
mengendalikan pergerakan pada sumbu longitudinal. Pergerakan semacam ini
dikenal dengan istilah roll. Sayap dengan aileron yang digerakkan ke bawah akan
bergerak naik dikarenakan memperoleh gaya angkat, sementara sayap dengan
aileron yang digerakkan ke atas akan bergerak turun dikarenakan berkurangnya
gaya angkat.
Elevator
Kendali elevator pada sayap mengendalikan pesawat pada sumbu lateral, gerakan
ini dinamakan pitch. Elevator berada pada bagian belakang dari sayap stabilisasi
turun, maka sayap stabilisasi horizon akan memiliki gaya angkat yang akan
menyebabkan pesawat menukik ke bawah. Jika elevator bergerak naik maka akan
memberikan gaya tekan ke bawah pada sayap stabilisasi horizontal ini yang akan
menyebabkan pesawat akan menukik naik.
Rudder
Rudder berfungsi untuk mengendalikan pergerakkan pesawat pada sumbu
vertikal. Pergerakan semacam ini dikenal dengan istilah yaw. Cara kerjanya
mirip seperti elevator, hanya saja Rudder bergerak ke arah samping, tidak seperti
elevator yang bergerak secara vertikal (ke atas/bawah).
2.4.3. Pesawat Model 4 Channel Fixed Wing Proto-03
Penelitian ini menggunakan pesawat model 4 channel dengan konfigurasi yaitu
channel 1 digunakan untuk aileron, channel 2 digunakan untuk elevator, channel
3 digunakan untuk throotle dan channel 4 digunakan untuk rudder.
Adapun spesifikasi pesawat model Proto-03 adalah sebagai berikut :
Panjang sayap 175 cm
Panjang wahana 160 cm
Tinggi wahana 17 cm
Berat airframe 1150 gram
Wing loading 37,5 kg/m2
2.5 Global Positioning System (GPS)
GPS adalah jaringan satelit yang terdiri dari sekitar 24 satelit yang mengelilingi
bumi sebanyak dua kali sehari pada ketinggian 11.000 mil. Gambar 2.8.
Merupakan jaringan satelit GPS yang bergerak pada orbitnya mengelilingi bumi.
Gambar 2.8. Jaringan satelit [9]
GPS dikembangkan oleh United States Department of Defense (DOD) untuk
kepentingan militer. Setelah beberapa tahun berlalu GPS telah terbukti dapat
berguna untuk kepentingan umum yang bukan militer [10].
2.5.1 Format Data GPS [11]
Format informasi antarmuka distandarisasikan oleh NMEA (National Marine
Electronics Association) untuk meyakinkan jika ada perubahan data tidak
menimbulkan suatu masalah. Tujuh tipe data berikut secara luas digunakan pada
GPS modul.
b. GGL (Posisi geografi-Latitude/Longitude)
c. GSA (GNSS DOP dan satelit aktif, penurunan akurasi dan jumlah
satelit pada Global Satellite Navigation System)
d. GSV (Satelite GNSS yang terlihat)
e. RMC (Recommended Minimum Specific GNSSdata)
f. VTG (kecepatan)
g. ZDA (tanggal dan waktu)
Data yang dikirimkan dengan kecepatan 4800 bit per detik menggunakan 8-bit
printable karakter ASCII. Transmisi dimulai dengan start bit (logika nol), diikuti
dengan delapan bit data dan stop bit (logika 1) yang ditambahkan pada akhir data,
dan tidak menggunakan parity bit. Format NMEA dapat dilihat pada gambar 2.9.
berikut ini :
Gambar 2.9. Format NMEA (level TTL dan RS232)
Setiap set data GPS dibentuk dengan cara yang sama dan memiliki struktur seperti
ini:
$GPDTS,Inf_1,Inf_2,_Inf_3,Inf_4,Inf_5,Inf_6,Inf_n*CS<CR><LF>
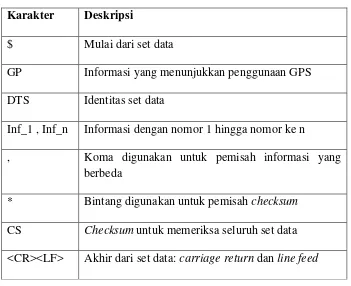
Fungsi dari masing-masing karakter atau set karakter dijelaskan pada tabel 2.1. di
Tabel 2.1. Penjelasan fungsi karakter dari set data NMEA
Karakter Deskripsi
$ Mulai dari set data
GP Informasi yang menunjukkan penggunaan GPS
DTS Identitas set data
Inf_1 , Inf_n Informasi dengan nomor 1 hingga nomor ke n
, Koma digunakan untuk pemisah informasi yang
berbeda
* Bintang digunakan untuk pemisah checksum
CS Checksum untuk memeriksa seluruh set data
<CR><LF> Akhir dari set data: carriage return dan line feed
Jumlah maksimum karakter yang digunakan tidak boleh melebihi 79, untuk
kepentingan menentukan jumlah ini, tanda mulai $ dan tanda akhir <CR><LF>
tidak dihitung.
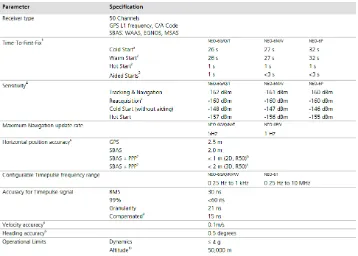
2.5.2 Penerima GPS uBlox Neo 6-M [12]
Penerima GPS Ublox Neo-6M merupakan penerima GPS yang berdiri sendiri
(stand alone) dengan kemampuan kinerja yang tinggi dalam memberikan
informasi posisi. Dengan kapasitas maksimal 50 satelit dan fitur Time To First
Fix (TTFF) dibawah satu detik. Ublox Neo-6M digunakan untuk mengakuisisi
koordinat dengan kemampuan menemukan satelit dengan singkat. Gambar 2.10.
Gambar 2.10. Spesifikasi penerima GPS Ublox Neo-6M
2.6 Radio Telemetri
Telemetri adalah suatu proses yang digunakan untuk mengukur atau mencatat
suatu besaran fisik pada suatu lokasi yang letaknya jauh dari pusat pengolahan
hasil pengukuran [1]. Berikut ini adalah struktur umum radio telemetri.
2.6.1. 9XTendTM OEM RF Module [13]
9XTend™ OEM RF Module ialah sebuah modul elektronik yang digunakan
sebagai pengirim data digital yang menggunakan komunikasi serial.
Spesifikasi dari modul ini adalah sebagai berikut :
1. Bit rate yang dapat diatur dari 1200 - 230400 bps,
2. Jarak jangkauan 22km
3. Frekuensi 902-928 Mhz
4. Suplai tegangan 2.8 – 5.5 Volt DC
Gambar 2.12. XTend dalam bentuk modul
2.6.2. 9XTendTM PKG-U [14]
9XTendTM PKG-U adalah radio modem yang bekerja pada frekuensi 900 MHz
dengan daya output dapat mencapai 1 Watt.
Fitur dan spesifikasi dari 9XTendTM PKG-U ini adalah :
b. Jangkauan dapat mencapai 3000 kaki (900m) pada penggunaan di dalam
ruangan.
c. Jangkauan dapat mencapai 40 miles (64km) pada penggunaan di luar
ruangan-line of sight dengan high gain antenna.
d. Daya keluaran dapat diubah dari 1mW sampai 1 W
e. Power supply voltage 7 - 28V
f. Arus penerima 100 mA
g. Arus pemancar 88 – 480 mA
Gambar 2.13. 9XTendTM PKG-U
Gambar 2.13. merupakan tampak depan dan belakang dari PKG-U. pada
penelitian ini penulis menggunakan PKG-U yang langsung dapat terhubung ke
portable laptop dengan kabel Universal Serial Bus (USB).
2.7 Motor servo
Motor servo adalah aktuator rotari yang memungkinkan untuk kontrol yang tepat
Gambar 2.14. Konstruksi motor servo
Motor servo dikendalikan dengan cara mengirimkan sebuah pulsa yang lebar
pulsanya bervariasi. Biasanya lebar pulsanya antara 1.1 ms sampai 1.9 ms dengan
periode pulsa sebesar 20 mS. Lebar pulsa akan mengakibatkan perubahan posisi
pada servo. Agar posisi servo tetap pada posisi, maka pulsa harus terus diberikan
pada servo. Jadi meskipun ada gaya yang melawan, servo akan tetap bertahan
pada posisinya. Gambar 2.15 berikut ini adalah lebar pulsa dan posisi servo.
Gambar 2.15. Lebar pulsa dan posisi servo motor
2.8 Brushless Motor
Brushless Motor adalah jenis motor yang memiliki konstruksi magnet permanen
dan sebuah stator berkutub yang dililit kawat. Bagian-bagian brushless motor
a. Stator
Dasar dari stator brushless motor adalah sebuah stator dengan memiliki tiga buah
gulungan.
b. Rotor
Rotor pada brushless motor terdiri dari beberapa magnet permanen. Jumlah kutub
magnet pada rotor juga mempengaruhi ukuran langkah dan torsi dari motor.
Perbedaan jumlah kutub magnet ini dapat dilihat pada gambar 2.16. berikut ini.
Gambar 2.16. Tiga kumparan stator tiga fasa dan stator motor DC [16]
Untuk mengontrol kecepatan brushless motor maka dibutuhkan Electrical Speed
Control (ESC). ESC menerima perintah dari receiver remote kemudian
menafsirkannya untuk memberikan variasi dalam kecepatan motor dan arah.
Gambar 2.17. berikut ini adalah diagram dari Electronic Speed Conroller (ESC)
dan brushless motor:
Sinyal pada ESC berupa sinyal Pulse Width Modulation (PWM), yang berarti
untuk mengontrol kecepatan motor (RPM) maka ESC memvariasikan sinyal
PWM sesuai dengan RC transmitter.
2.9 Inertia Measuring Unit (IMU) MPU 6000 [17]
Sensor MPU6000 adalah sensor pertama di dunia yang terintegrasi dengan 6
sumbu MotionTracking dengan penggabungan perangkat 3 sumbu gyroscope, 3
sumbu accelerometer dan sebuah Digital Motion Processor (DMP). Sensor IMU
MPU6000 memiliki beberapa fitur, yaitu:
a. Gyroscope
Gyroscope adalah alat yang digunakan untuk mengukur atau mempertahankan
orientasi berdasarkan prinsip momentum angular. Pada prinsipnya mechanical
gyroscope adalah sebuah piringan (rotor) yang berputar pada sumbu (axis) yang
mampu bergerak ke beberapa arah. Berikut ini pada gambar 2.18. merupakan
sistem mekanikal gyroscope satu axis.
Sensor MEMS 3 sumbu gyroscope MPU6000 memiliki fitur sebagai berikut:
1. Digital output X-, Y-, dan Z- sumbu sudut sensor dengan tingkat
full-programmable berkisar pada ± 250, ±500, ±1000, dan ±2000º/s
2. Terintegrasi 16-bit ADC
3. Peningkatan bias dan sensitivitas suhu dapat distabilkan saat kalibrasi
4. Memiliki kemampuan untuk meredam noise pada frekuensi rendah
5. Digital-Programmable Low Past Filter
6. Standby current = 5μA
b. Accelerometer
Accelerometer adalah sebuah tranduser yang berfungsi untuk mengukur
percepatan, mendeteksi dan mengukur getaran, ataupun untuk mengukur
percepatan akibat gravitasi bumi.
Sensor Micro Electro Mechanical System 3 sumbu accelerometer MPU6000
memiliki fitur sebagai berikut:
1. Digital – output 3 sumbu accelerometer dengan programmable full scale berkisar dari ±2g, ±4g, dan ±16g
2. Terintergrasi 16-bit ADC
3. Mampu mendeketesi orentasi dan pensinyalan
4. Mampu mendeteksi sentuhan
Berikut ini pada gambar 2.19. merupakan konstruksi MEMS dari 3 sumbu
accelerometer.
Gambar 2.19. Konstruksi dari accelerometer [19]
2.10 Barometric Pressure Sensor
Sebuah sensor tekanan berfungsi untuk mengukur tekanan. Tekanan adalah
ekspresi dari gaya yang dibutuhkan untuk menghentikan cairan dari perluasan,
dan biasanya dinyatakan dalam gaya per satuan luas. Sebuah sensor tekanan
biasanya bertindak sebagai transduser, yaitu menghasilkan sinyal sebagai fungsi
dari tekanan yang dikenakan. Bentuk asli dari sensor barometer MS5611-01BA03
dapat dilihat pada gambar 2.20..
2.11 Magnetometer
Sensor magnetometer adalah sebuah sensor yang berfungsi untuk mengukur arah
atau kuat lemahnya medan magnet secara absolut. Kemampuan sensor sangat
tergantung dengan pengenalan lokasi. Sensor magnetometer mengacu pada
magnetik bumi, pergeseran arah dari magnet bumi. Bentuk asli dari sensor
barometer HMC5883L dapat dilihat pada gambar 2.21.
Gambar 2.21. Sensor magnetometer HMC5883L [21]
2.12 Proportional Integrative Derivative (PID)
Proportional Integrative Derivative (PID) merupakan sistem pengendalian untuk
menentukan presisi suatu sistem instrumentasi dengan karakteristik adanya umpan
balik pada sistem tersebut.
Komponen kontrol PID ini terdiri dari tiga jenis yaitu Proportional, Integratif dan
Derivatif. Ketiganya dapat dipakai bersamaan maupun sendiri-sendiri tergantung
dari respon yang kita inginkan terhadap suatu plant.
a. Kontrol Proporsional
Kontrol P jika G(s) = kp, dengan k adalah konstanta. Jika u = G(s) • e maka u =
Kp • e dengan Kp adalah Konstanta Proporsional. Kp berlaku sebagai Gain
(penguat) saja tanpa memberikan efek dinamik kepada kinerja kontroler.
tidak dinamik ini. Walaupun demikian dalam aplikasi-aplikasi dasar yang
sederhana kontrol P ini cukup mampu untuk memperbaiki respon transien
khususnya rise time dan settling time.
b. Kontrol Integrative
Jika G(s) adalah kontrol I maka u dapat dinyatakan sebagai
u(t) = [ −�� �]�� (2.1)
menghilangkan respon steady-state, namun pemilihan Ki yang tidak tepat dapat
menyebabkan respon transien yang tinggi sehingga dapat menyebabkan
ketidakstabilan sistem. Pemilihan Ki yang sangat tinggi justru dapat
menyebabkan output berosilasi karena menambah orde sistem.
c. Kontrol Derivatif
Sinyal kontrol u yang dihasilkan oleh kontrol D dapat dinyatakan sebagai:
G(s) =s.Kd (2.3)
Dari persamaan di atas, nampak bahwa sifat dari kontrol D ini dalam konteks
memperbaiki respon transien dengan memprediksi eror yang akan terjadi. Kontrol
Derivatif hanya berubah saat ada perubahan eror sehingga saat eror statis kontrol
ini tidak akan bereaksi, hal ini pula yang menyebabkan kontroler Derivatif tidak
III. METODE PENELITIAN
3.1. Alat dan Bahan
Peralatan yang digunakan dalam penelitian ini adalah:
1. Satu unit model pesawat radio controlaeromodelling Fixed Wing Proto-03 RTF (Ready to Fly).
2. Sistem AutopilotBoard ArdupilotMega 2.5
3. Radio XTend-PKG-U 900 MHz dan MaxStream 9XTend 900 Mhz OEM
4. Modul Global Positioning System (GPS) Crius uBlox Neo 6-M v2.0
5. Software Agisoft Photoscan Pro
6. Kamera Digital Canon A2300
7. WindMeter
8. Satu unit Laptop
9. Google Earth Pro 7.1.4.1529
10. U-Center 8.13
11. Mission Planner software GCS
12. Kabel dan komponen elektronik
3.2. Metode/Prosedur Kerja
Dalam penelitian ini, langkah-langkah kerja yang dilakukan adalah sebagai
3.2.1. Studi Literatur
Studi literatur dilakukan untuk mempelajari berbagai sumber referensi atau teori
yang berkaitan dengan sistem autopilot ArdupilotMega 2.5 sebagai pengendali
pesawat.
3.2.2. Pembuatan Diagram Alir Penelitian
Untuk mempermudah dalam pengerjaan penelitian digunakan diagram alir yang
dapat dilihat pada gambar 3.1. berikut ini.
3.2.3. Diagram Blok Komponen Sistem Autopilot ArdupilotMega 2.5
Berikut ini diagram blok komponen elektronika pada pesawat model:
Gambar 1.2. Diagram blok komponen sistem autopilot
Gambar 3.2. diatas merupakan diagram blok dari modul-modul yang dipakai pada
sistem autopilot. Board ArdupilotMega 2.5 merupakan prosesor utama yang
kesemua sinyal data yang dikirim oleh modul sensor kemudian diolah dan hasil
pengolahan tersebut di teruskan ke aktuator dan electronic speed controller.
Radio control receiver mendapatkan data control pergerakan wahana dan
pemilihan flight mode. Setelah flight mode dipilih sensor Inertia Meassuring Unit
mengirimkan data roll, pitch, yaw, heading dan altitude ke main processor. Main
procesor merequest data koordinat dan altitude dari GPS, data dari GPS ini yang
kemudian dijadikan acuan pergerakan aktuator (servo motor) dan motor
penggerak utama (brushless motor). Disaat yang bersamaan, main processor
mengirimkan data penerbangan tadi ke GCS menggunakan radio modem. selain
digunakan untuk monitoring selama wahana mengudara, radio modem juga
3.2.4. Sistem Interkoneksi AutopilotMega 2.5
Gambar 3.3. Sistem nirkabel radio kontrol dan GCS
Dari gambar 3.3. diatas dapat dijelaskan bahwa komunikasi antara radio control
dan sistem autopilot pada pesawat menggunakan komunikasi satu arah sedangkan
komunikasi antara sistem autopilot dengan ground control station menggunakan
komunikasi dua arah. Sistem komunikasi dua arah memungkinkan ground
control memberikan perintah aksi dan atau konfigurasi perangkat lunak walaupun
pesawat masih dalam misi penerbangan. Sistem ini juga memungkinkan ground
control dapat merekam data penerbangan wahana selama melakukan misi terbang
yang nantinya dapat digunakan untuk proses setting dan konfigurasi pesawat.
Pada sistem ini, radio control hanya dapat mengirimkan sinyal masukan ke sistem
autopilot yang ada pada seperti pergerakan pesawat dan peralihan flight mode.
Pada penelitian ini penulis menggunakan radio kontrol untuk memilih flight mode
walaupun pemilihan ini dapat dilakukan dengan menggunakan ground control
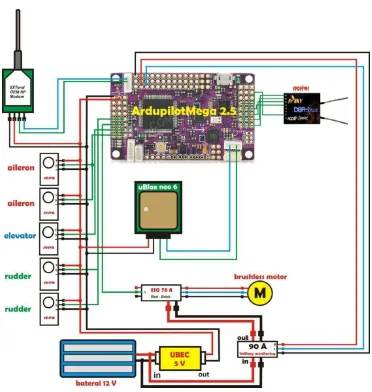
Gambar 3.4. Koneksi umum sistem autopilot pada pesawat
Gambar 3.4. di atas merupakan koneksi umum sistem autopilot ArdupilotMega
2.5 yang akan dipakai. Terdapat 5 buah motor servo, sistem gerak aileron dan
rudder menggunakan 2 buah motor servo sedangkan elevator menggunakan 1
buah. Kesemua motor servo ini dikoneksikan ke port keluaran. Sedangkan untuk
modul GPS, 9XTend dan receiver FrSKY menggunakan konektor khusus. Pada
modul sensor battery monitor terdapat 2 keluaran yaitu tegangan dan arus, pada
gambar diatas koneksi berwarna merah menunjukkan keluaran dari sensor
3.2.5. Instalasi Mission Planner GCS
Penelitian ini menggunakan software GCS source terbuka Mission Planner mav
1.0. Penulis menggunakan komputer dengan sistem operasi windows 7 32-bit
dengan .dot Framework 4.0 terinstal untuk menjalankan Mission Planner ini.
Mission planner mav 1.0 installer diunduh melalui website dengan alamat :
https://code.google.com/p/ardupilot-mega/downloads/list?q=label:Deprecated
Software Mission planner diinstal ke Program File drive:c pada komputer, ulititas
instalasi akan menginstal driver yang diperlukan seperti Arduino LLC, FTDI
CDM Driver Package-Bus/D2XX, FTDI CDM Driver Package-VCP Driver dan
3D Robotics Driver. Driver-driver tersebut digunakan oleh windows untuk
mengenali dan menyediakan COM port yang akan di gunakan oleh semua
interaksi USB (Universal Serial Bus) dengan APM. COM port Baud rate yang
digunakan untuk berkomunikasi adalah 115200, Mission planner setup wizard
dapat dilihat pada gambar 3.5.
3.2.6. Instalasi Hardware
Tahap instalasi hardware ini merupakan tahap instalasi bagian-bagian dari sistem
autopilot pada pesawat model Proto-03. Ada beberapa parts hardware yang
instalasinya perlu diperhatikan karena akan berdampak pada ketelitian dan
kestabilan sistem, yaitu sebagai berikut:
a. Autopilot Board APM 2.5
Autopilot yang digunakan untuk penelitian ini adalah APM 2.5 dengan ATmega
2560 sebagai pusat pengolah data. APM 2.5 mempunyai fitur sebagai berikut:
1. Full mission scripting with point-and-click desktop utilities
2. Two-way telemetry and in-flight command using the powerful MAVLink
protocol
3. 3-axis gyro
4. 3-axis accelerometer
5. 3-axis magnetometer
6. Barometric pressure sensor for altitude
Konfigurasi pin input-output pada board APM 2.5 dapat dilihat pada gambar 3.6.
berikut ini.
Terdapat 5 bagian pin input-output (output, input, telem, GPS, analog input, I2C ,
PM). channel output disebelah kiri gambar terdiri dari 8 channel untuk kemudian
diteruskan ke aktuator yaitu channel 1 untuk servo aileron, channel 2 untuk servo
elevator, channel 3 untuk ESC dan channel 4 untuk servo rudder sedangkan
channel 5 sampai 8 tidak digunakan. Port telem dihubungkan ke modul telemetry,
kemudian port analog dibagan atas board digunakan oleh sensor-sensor analog
antara lain airspeed sensor, power sensor. Channelinput dibagian sebelah kanan
board digunakan untuk menghubungkan keluaran dari receiver remote control,
channel 1 untuk aileron, channel 2 untuk elevator, channel 3 untuk throttle,
channel 4 untuk rudder dan channel 8 untuk flight mode. Port GPS digunakan
untuk gps modul, apabila menggunakan sensor compass external untuk
menghubungkannya digunakan port I2C kemudian port PM digunakan untuk
menguhubungkan power modul sebagai sumber tegangan bagi APM.
b. GPS Ublox Neo 6-M
Modul GPS yang digunakan penelitian ini adalah Crius uBlox Neo 6-M v2.0.
Menggunakan UART (Universal Asynchronous Receiver/Transmitter) untuk
berkomunikasi dengan board APM 2.5 (Tx/Rx), Crius uBlox Neo 6-M memiliki
fitur sebagai berikut :
1. u-blox NEO-6M GPS module
2. EEPROM for save configuration permanently
3. Build in 25X25mm active antenna
5. Rechargeable battery for backup/hotstart
c. MaxStream 9XTend 900 Mhz OEM Module [1]
Modem telemetry yang digunakan pada penelitian ini adalah MaxStream 9XTend,
dengan fitur –fitur sebagai berikut:
1. Frequency Band 900Mhz and 2.4Ghz (2 versions)
2. Output Power 1mW to 1W software selectable
3. Sensitivity -110 dBm (@ 9600 bps)
4. RF Data Rate 9.6 or 115.2 Kbps
5. Interface data rate up to 230.4 Kbps
6. Power Draw (typical) 730 mA TX / 80 mA RX
7. Supply Voltage 2.8 to 5.5v
8. Range (typical, depends on antenna & environment) Up to 64km line-of-sight
9. Dimensions 36 x 60 x 5mm
Berikut ini susunan pin koneksi modem:
Gambar 3.7.Pin out Maxstream-9XTend [1]
Sedangkan keterangan untuk masing-masing pin dapat dilihat pada tabel 3.2.
berikut ini:
Tabel 1.2. Deskripsi pin out MaxStream 9XTend [1]
a. Turnigy 9X dan Flight Mode Switch
Pada penelitian ini digunakan remote control Turnigy 9X dengan spesifikasi
sebagai berikut :
1. Encoding PCM 9 channel and 8 channel PPM PPM (2.4Ghz).
2. 8 model memories internally with possibility to change their name.
4. Combines the programming for aircraft, glider, helicopter.
5. Doubles deflections (D / R) and a timer.
6. Easy access to international grouped on the front.
7. Ergonomic handle transportation.
8. Navigation classic 6 keys.
9. 7 Inter and 3 knobs.
10. Alarm to start on some international. [24]
Adapun flight mode switch digunakan untuk memilih flight mode pada saat
penerbangan. Pada uji terbang nantinya digunakan tiga flight mode yaitu
stabilize, auto dan return to launch. Channel 8 digunakan sebagai channel untuk
pemilihan flight mode ini dengan mengatur sinyal PWM output dari remote
control. Gambar 3.8. berikut ini adalah rangkaian 6 position switch untuk
pemilihan flight mode.
Gambar 3.8. Rangkaian 6 position switch
3.2.7. Konfigurasi Kontrol Autopilot
Pada tahapan ini semua parameter-parameter kestabilan autopilot
beberapa konfigurasi yang harus dilakukan sebelum pesawat dapat mengudara
antara lain :
1. Pemilihan firmware Autopilot
Ada beberapa firmware autopilot yang disediakan oleh ardupilot pada mission
planner. Terbagi menjadi dua yaitu Arduplane untuk wahana bertipe fixed wing
dan Arducopter untuk wahana bertipe multicopter.
2. Seting dan kalibrasi sensor
Sebelum melakukan penerbangan dan misi, terlebih dahulu dilakukan seting dan
kalibrasi untuk beberapa sensor yang terpasang pada sistem autopilot diantaranya
sebagai berikut:
a. Leveling
Ada dua sensor yang harus dikalibrasi terlebih dahulu sebelum wahana
mengudara yaitu accelerometer dan gyroscope. wahana harus diletakkan datar
dan level dengan sayap pesawat sebagai panduan, hal ini dikarenakan pada saat
terbang posisi level pesawat mengikuti sayap.
b. Compass
Seperti halnya accelerometer dan gyroscope, sensor compass juga harus di
kalibrasi terlebih dahulu sebelum wahana dapat diterbangkan. Pengaturan
declination dapat dipilih pada mode auto ataupun manual, seting manual harus
wilayah yang akan dilakukan misi. Sedangkan untuk kalibrasi compass, wahana
digerakkan 3-axis.
c. Radio Kontrol
Kalibrasi radio sangat penting dilakukan untuk menyamakan nilai ppm input dari
receiver remote control turnigy 9X dengan apm 2.5, nilai ppm ini sangat
berpengaruh pada respon channel yang digunakan. Pada kalibrasi radio ini juga,
6 position switch dikalibrasi untuk dapat menyesuaikan PPM minimal dan
maksimal antara radio dengan apm 2.5.
d. Telemetry Modem
Agar kedua modem telemetry MaxStream 9Xtend yang dipasang pada wahana
maupun di ground station dapat berkomunikasi, modem protokol, dan baud rate
haruslah sama pada keduanya. Pada penelitian ini digunakan baud rate 57000
untuk mendapatkan data real time dan untuk meningkatkan jarak jangkauan
modem dengan daya yang nantinya akan digunakan adalah sebesar 1 Watt.
3. PID Pada Kendali Autopilot
Meningkatkan kepresisian pembacaan nilai eror dengan memanfaatkan umpan
balik dari beberapa sensor merupakan fungsi dari kontrol PID, dengan
menggunakan kontrol ini diharapkan gerak pesawat diudara pada saat
melaksanakan misi akan sesuai dengan flight plan yang sudah dibuat. Ada tiga
gambar blok diagram dari pengendalian kontrol PID terhadap ketiga axis
pergerakan tersebut :
a. PID pada kontrol Roll
Gambar 3.9. PID pada kontrol roll
b. PID pada kontrol Pitch
Gambar 3.10. PID pada kontrol pitch
c. PID pada kontrol Yaw
d. PID pada control Altitude
Gambar 3.12. PID pada kontrol altitude
3.2.8. Pengujian
Pengujian dilakukan dengan melakukan uji terbang. Uji terbang ini merupakan
tahap pengujian secara keseluruhan terhadap hasil pengembangan dan konfigurasi.
Pengujian dilakukan dengan melakukan penerbangan dengan memfokuskan
pengamatan pada fungsi autopilot dan respon pesawat pada saat penerbangan.
Pengujian menggunakan tiga flight mode yaitu stabilize, auto dan return to
launch. Pada Mode stabilize, pesawat harus mampu terbang dengan stabil tidak
miring ke kanan atau miring ke kiri, tidak nose up atau nose down. Pada mode
auto pesawat akan terbang mengikuti lintasan waypoint dengan jarak, ketinggian
dan radius waypoint yang telah ditentukan pada mission planner. Pada
penerbangan menggunakan mode Return To Launch, pesawat akan terbang
kembali ke titik home walaupun misi terbang belum selesai dilaksanakan, pada
mengunakan switch pada remote control dan yang kedua RTL di masukkan ke
dalam fail safe.
Pengembangan dan konfigurasi dikatakan gagal jika pesawat tidak dapat
diterbangkan. Pengembangan dan konfigurasi dapat dikatakan berhasil jika
pesawat dapat diterbangkan, dengan dua parameter. Parameter pertama adalah
pesawat dikatakan dapat terbang dengan baik jika pesawat dapat terbang
mengikuti lintasan waypoint dengan eror simpangan kurang dari atau sama
dengan 1 meter. Eror simpangan yang dimaksud disini adalah selisih jarak antara
rute terbang pesawat yang sebenarnya dengan rute terbang yang seharusnya (yang
diatur pada flight plan Mission Planner). Parameter yang kedua yaitu pesawat
IV. HASIL DAN PEMBAHASAN
4.1 Hasil
4.1.1 Hasil Instalasi Hardware
Penempatan perangkat elektonik autopilot pada wahana Proto-03 dapat dilihat
pada gambar 4.1. berikut ini.
Gambar 1.1. Tata letak perangkat elektronik
Penjelasan penempatan perangkat adalah sebagai berikut :
1. Xtend 900MHz Radio, modul radio telemetri ini diletakkan di bagian paling depan dari wahana jauh dari peralatan elektronik yang lain (terutama
2. Li-Po Battery, pada penelitian ini digunakan baterai lithium Polymer 3 x 2200mAh 3S dengan berat keseluruhan 564 gram. Sama seperti modul
temeletri XTend, baterai Li-Po ini diletakkan di bagian paling depan dari
wahana agar titik Centre Of Gravity (CG) dapat terpenuhi.
3. Digital Camera Slot, Slot ini digunakan sebagai tempat untuk meletakkan kamera Canon A2300 dengan berat 125 gram. Slot ini ditempatkan di bagian
depan wahana setelah baterai Li-Po dengan tujuan yang sama dengan
penempatan baterai Li-Po.
4. APM 2.5, penempatan board autopilot sebisa mungkin lebih dekat dengan titik CG sehingga kinerja sensor-sensor yang ada di dalamnya semakin efektif
karena pada titik tersebut getaran sangat kecil [23]. Pada penelitian ini, board
autopilot diletakkan agak jauh dari titik CG karena tidak ada ruang di bawah
sayap dan untuk mengurangi resiko board rusak apabila terjadi crash landing,
karena kemungkinan fuselage patah di bawah sayap sangat memungkinkan
mengingat struktur fuselage pada bagian tersebut sangat rentan sehingga
board diletakkan pada fuselage yang agak tebal dan tidak terlalu jauh dari
titik CG.
5. FrSKY Radio, modul ini diletakkan berdekatan dengan board autopilot
untuk memangkas penggunaan kabel yang berlebihan modul ini diletakkan
berdekatan pula dengan sayap untuk memasang antena.
6. UBEC 5Volt (Universal Battery Elimination Circuit), modul ini diletakkan agak berjauhan dengan board autopilot untuk meminimalisir kemungkinan
adanya interferensi magnetic dan panas berlebih karena modul ini
Penempatan perangkat penunjang autopilot dapat dilihat pada gambar 4.2. berikut.
Gambar 4.2. Tata letak perangkat penunjang
Penjelasan penempatan adalah sebagai berikut :
1. XTend Antenna, antena diletakkan di luar dari struktur wahana dengan maksud untuk lebih memaksimalkan penerimaan sinyal.
2. Power Cable, diletakkan berjauhan dengan sistem elektronik seperti board autopilot sehingga meminimalisir kemungkinan terjadinya interferensi
magnetik yang mengakibatkan pembacaan sensor kompas menjadi tidak
akurat.
tertutup sehingga langsung berhadapan dengan langit untuk lebih
mengoptimalkan penerimaan data.
4. Brushless Motor, diletakkan dengan konfigurasi penggerak belakang untuk melindungi motor dan propeller pada saat terjadi crash landing.
5. Servo motor, diletakkan berdekatan dengan sistem gerak dari wahana untuk menghemat penggunaan pushrod.
6. Electronic Speed Controller, perangkat ini menghasilkan rugi-rugi panas yang apabila tidak diminimalisir dapat merusak perangkat ini sendiri sehingga
dalam pemasangannya heatsink yang ada pada perangkat ditaruh di luar
struktur fuselage untuk lebih meningkatkan proses pendinginan pada saat
wahana mengudara.
Sedangkan perangkat GCS ditampilkan pada gambar 4.3. berikut ini :
![Gambar 2.8. Jaringan satelit [9]](https://thumb-ap.123doks.com/thumbv2/123dok/554920.152097/37.595.231.395.213.376/gambar-jaringan-satelit.webp)

![Gambar 2.16. Tiga kumparan stator tiga fasa dan stator motor DC [16]](https://thumb-ap.123doks.com/thumbv2/123dok/554920.152097/44.595.228.397.309.397/gambar-tiga-kumparan-stator-tiga-fasa-stator-motor.webp)
![Gambar 2.18. Sistem mekanikal pada gyroscope [18]](https://thumb-ap.123doks.com/thumbv2/123dok/554920.152097/45.595.223.405.570.717/gambar-sistem-mekanikal-pada-gyroscope.webp)
![Gambar 2.20. Sensor barometer MS5611-01BA03 [20]](https://thumb-ap.123doks.com/thumbv2/123dok/554920.152097/47.595.215.407.149.286/gambar-sensor-barometer-ms-ba.webp)
![Gambar 3.6. Pin input-output APM 2.5 [22]](https://thumb-ap.123doks.com/thumbv2/123dok/554920.152097/57.595.234.391.614.719/gambar-pin-input-output-apm.webp)
