!" !#$%#$%"&
'
"&
(') (* ("(
)"+)',
,
"&
!
" # $"% " " &# '# (
(
!
)&
* $
)*
&
&
&
)*
+
+ $
&
&
* + $
)*
$
+
)$)&
$
)
,
)*
+
)$)&
ii
!!"" # $"" #
%
% &
'
& (
) *)
! +,- .&
+/ $ .& 0
(
1 )
2
)3 ) & 3 )
(
iii
KATA PENGANTAR
Puji syukur kehadirat Allah SWT Yang Maha Esa dan atas segala limpahan rahmat, taufik,
serta hidayah-Nya sehingga penulis dapat menyelesaikan Laporan Tesis ini sesuai dengan waktu
yang telah direncanakan.
Dalam penulisan Laporan Tesis ini, penulis ingin menyampaikan ucapan terimakasih
kepada :
1. Allah SWT dan rosulnya Nabi Muhammad SAW
2. Orang tua, Istri, serta anak tercinta yang telah memberikan dorongan dan semangat dengan
cinta dan kasih sayangnya yang tiada batas dan tak terbalaskan serta doa restunya.
3. PT. Pembangkitan Jawa Bali Services melalui beasiswa, telah mendukung penulis sehingga
mencapai gelar Master.
4. Bapak Dr. Eng. Harus Laksana Guntur, ST, M.Eng selaku dosen pembimbing yang telah
menyumbangkan waktu, tenaga serta pikirannya sehingga tesis ini dapat diselesaikan.
5. Bapak dan Ibu dosen penguji tesis yang telah memberikan kritik dan saran demi
kesempurnaan tesis ini.
6. Semua Bapak dan Ibu dosen pasca sarjana Teknik Mesin yang telah memberikan ilmu
selama kuliah, juga untuk seluruh karyawan pasca sarjana Teknik Mesin atas pelayanannya.
7. Mangemen UBJOM PT PJB Paiton Baru yang telah memberikan ijin dan dukungan dalam
melakukan eksperimen pada stacker reclaimernya.
8. Bapak Sigit Pramono, bagian pemeliharaan mesin 2, untuk dukungan data dan informasi
teknis.
9. Bagian CBM PLTU Paiton Baru atas bantuannya dalam melakukan pengambilan data
vibrasi.
10.Teman-teman keluarga besar pasca sarjana Teknik Mesin Rekayasa Energi.
Akhir kata semoga tesis ini dapat memberikan manfaat bagi kita semua. Penulisan tesis
ini masih banyak kekurangan, oleh karena itu segala kritik dan saran untuk pengembangan
sangat diharapkan.
Surabaya, Desember 2014
v
DAFTAR ISI
ABSTRAK ... i
ABSTRACT ... ii
KATA PENGANTAR ... iii
DAFTAR ISI ... v
DAFTAR GAMBAR ... ix
DAFTAR TABEL ... xiii
BAB 1 ... 1
2.1 Penelitian Terdahulu ... 7
2.2 Teori Penunjang ... 11
2.2.1 Mekanika Getaran ... 11
2.2.2 Elemen Getaran ... 12
2.2.3 Karakteristik Getaran ... 13
2.2.4 Derajat Kebebasan ... 17
2.2.5 Free Body Diagram ... 19
2.2.6 Persamaan Gerak ... 19
2.2.7 State Variable Equations ... 22
2.2.8 Karakteristik Redaman ... 24
2.3 Belt Conveyor System ... 27
2.3.1 Bagian-bagian konveyor ... 27
2.3.2 Perhitungan Effective Tension Dan Daya Pada Belt Conveyor ... 31
2.4 Simulink Matlab ... 38
vi
BAB 3 ... 41
3.1 Metodologi Penelitian ... 41
3.2 Studi Literatur ... 43
3.3 Pengumpulan Data Teknis ... 43
3.4 Pengambilan Data Eksperimen ... 45
3.5 Pembuatan Model Matematis ... 47
3.6 Persamaan Gerak Dinamis ... 49
3.7 Membangun Bklok Diagram ... 49
3.8 Simulasi Respon Dinamis ... 49
3.9 Analisa Hasil ... 49
BAB 4 ... 51
4.1 Variasi dan Titik Pengukuran ... 51
4.2 Hasil Pengukuran Respon Getaran ... 52
4.3 Analisa Hasil eksperimen ... 57
BAB 5 ... 61
5.1 Pemodelan Matematis ... 61
5.2 Pembuatan Model ... 61
5.3 Free Body Diagram, Persamaaan Gerak, Dan State Variable ... 63
5.4 Parameter Pemodelan ... 69
5.5 Gaya Eksitasi ... 69
5.6 Hasil Simulasi ... 72
5.6.1 Respon getaran hasil simnulasi eksitasi impuls ... 72
5.6.2 Simulasi eksitasi periodik ... 73
5.6.3 Analisa hasil simulasi... 80
BAB 6 ... 83
6.1 Perbandingan Gelombang Respon Getaran ... 83
6.1.1 Perbandingan respon getaran pada luffing angle 30 dan conveying rate 300 t/h. ... 83
vii
6.1.3 Perbandingan respon getaran pada luffing angle 40 dan conveying
rate 300 t/h. ... 87
6.1.4 Analisa perbandingangrafik hasill eksperimen dan simulasi ... 89
6.2 Perbandingan RMS Velocity Respon Getaran ... 90
BAB 7 ... 95
7.1 Kesimpulan ... 95
7.2 Saran ... 95
xiii
DAFTAR TABEL
Tabel 2.1 Faktor KY ... 34
Tabel 2.2 Faktor TP... 34
Tabel 2.3 Discharge Plow Allowance ... 35
Tabel 2.4 Skirtboard Friction Factor, Cs ... 36
Tabel 2.5 Wrap Factor, Cw ... 37
Tabel 2.6 Batas Nilai pada Pengukuran Non-rotating Parts... 40
Tabel 3.1 Spesifikasi Konveyor Boom ... 41
Tabel 3.2 Spesifikasi Gearbox ... 41
Tabel 3.3 Spesifikasi Motor ... 41
Tabel 4.1 Variasi Eksperimen ... 51
Tabel 4.2 Hasil Eksperimen Respon Getaran Pada Frekuenbsi 1,237 Hz ... 57
Tabel 5.1 Parameter pemodelan ... 69
Tabel 5.2 Spesifikasi Teknis Konveyor ... 70
Tabel 5.3 Faktor-Faktor Dalam Perhitungan ... 70
Tabel 5.4 Hasil Perhitungan Komponen tegangan Efektif Konveyor ... 71
Tabel 5.5 Perhitungan Tegangan Efektif ... 72
Tabel 5.6 RMS Velocity Hasil Simulasi ... 80
Tabel 6.1 Perbandingan RMS Velocity Eksperimen, simulasi, dan effective tension pada DPIB horizontal ... 91
Tabel 6.2 Perbandingan RMS Velocity Eksperimen, simulasi, dan effective tension pada DPIB vertikal ... 91
Tabel 6.3 Perbandingan RMS Velocity Eksperimen, simulasi, dan effective tension pada DPOB horizontal ... 92
ix
DAFTAR GAMBAR
Gambar 1.1 Flow Chart Dan Skema Proses Unloading ... .1
Gambar 1.2 Flow Chart Dan Skema Proses loading ... .2
Gambar 1.3 Stacker Recklaimer ... 2
Gambar 1.4 Tren Vibrasi Outboard Bearing Pulley Konveyor Boom ... 3
Gambar 2.1 Belt Support Interaction Untuk Model Moving String ... 7
Gambar 2.2 Spektrum Hasil Simulasi ... 8
Gambar 2.3 Pengaruh Parameter Beban Terhadap Diagnostic Feature ... 8
Gambar 2.4 Solid Model Of test Stand ... 9
Gambar 2.5 Skematik Dan Spring Model Dari Belt Drive System ... 10
Gambar 2.6 Perbandingan Hasil Simulasi Dan Eksperimen Saat Torque Pulse Amplitude 3 Nm ... 11
Gambar 2.7 Mekanisme Pegas Dengan Beban Pada Ujungnya ... 12
Gambar 2.8 Siklus Getaran ... 14
Gambar 2.9 Hubungan Fasa, Displacement, Velocity, Acceleration ... 16
Gambar 2.10 Beda Fasa 1800 ... 17
Gambar 2.11 Sistem 1 DOF (a) Sistem Translasi; (b) Sistem Rotasi ... 18
Gambar 2.12 Sistem Pegas multi DOF ... 18
Gambar 2.13 Free Body Diagram Dari Sebuah Sistem 1 DOF ... 19
Gambar 2.14 Sistem Berderajat Kebebasan Tunggal ... 20
Gambar 2.15 Model Matematis dan Free Body Diagram... 21
Gambar 2.16 Sistem Getaran Dengan Redaman Untuk Bermaca-macam Damping Ratio ... 25
Gambar 2.17 Contoh Grafik Critically Damped ... 26
Gambar 2.18 Contoh Grafik Overdamped ... 26
Gambar 2.19 Contoh Grafik UnderDamped ... 27
x
Gambar 2.26 Grafik KT... 33
Gambar 2.27 Take up Gravity ... 39
Gambar 2.28 Contoh Block Diagram Simulink Matlab ... 40
Gambar 3.1 Diagram Alir Penelitian ... 41
Gambar 3.2 Konveyor Boom dan Penggerak ... 43
Gambar 3.3 Konveyor Boom dan Penggerak Tampak Atas ... 44
Gambar 3.4 Penggerak Konveyor Boom ... 44
Gambar 3.5 Alat Ukur Vibrasi ... 46
Gambar 3.6 Titik Pengukuran DPOB ... 46
Gambar 3.7 Titik Pengukuran DPIB ... 47
Gambar 3.8 Titik Pengukuran Torque Arm ... 47
Gambar 3.9 SkematikPenggerak Konveyor Boom ... 48
Gambar 3.10 Model Matematis Penggerak Konveyor Boom ... 48
Gambar 4.1 Drive Pulley Inboard Bearing (DPIB) ... 51
Gambar 4.2 Drive Pulley Outboard Bearing (DPOB) ... 52
Gambar 4.3 Respon DPIB pada Luffing angle 30conveying rate 300t/h ... 52
Gambar 4.4 Respon DPOB pada Luffing angle 30conveying rate 300t/h ... 53
Gambar 4.5 Respon DPIB pada Luffing angle 30conveying rate500t/h ... 54
Gambar 4.6 Respon DPOB pada Luffing angle 30conveying rate500t/h ... 54
Gambar 4.7 Respon DPIB pada Luffing angle40conveying rate 300t/h ... 55
Gambar 4.8 Respon DPOB pada Luffing angle40conveying rate 300t/h ... 56
Gambar 4.9 Trending Pengukuran Conveying Rate Saat Eksperimen ... 56
Gambar 5.1 Stacker Reclaimer ... 61
Gambar 5.2 Mekanisme Penggerak Konveyor Boom (pandangan depan) ... 61
Gambar 5.3 Mekanisme Penggerak Konveyor Boom (pandangan belakang)... 62
Gambar 5.4 Mekanisme Penggerak Konveyor Boom (pandangan atas) ... 62
Gambar 5.5 Support Mekanisme Penggerak Konveyor Boom ... 62
Gambar 5.6 Model Matematis ... 63
Gambar 5.7 Free Body Diagram Gerak Horizontal ... 64
Gambar 5.8 Free Body Diagram Gerak Vertikal ... 66
Gambar 5.9 Block Diagram ... 68
xi
Gambar 5.11 Respon Getaran Vertikal Hasil Simulasi Impuls ... 72
Gambar 5.12 Hasil simulasi respon getaran horizontal CG pada luffing angle 30
dan conveying rate 300 t/h ... 73
Gambar 5.13 Hasil simulasi respon getaran horizontal pada DPOB dan DPIB
pada luffing angle 30 dan conveying rate 300 t/h ... 74
Gambar 5.14 Hasil simulasi respon getaran horizontal CG pada luffing angle 30
dan conveying rate 500 t/h ... 74
Gambar 5.15 Hasil simulasi respon getaran horizontal pada DPOB dan DPIB
pada luffing angle 30 dan conveying rate 500 t/h ... 75
Gambar 5.16 Hasil simulasi respon getaran horizontal CG pada luffing angle 40
dan conveying rate 300 t/h ... 76
Gambar 5.17 Hasil simulasi respon getaran horizontal pada DPOB dan DPIB
pada luffing angle 40 dan conveying rate 300 t/h ... 76
Gambar 5.18 Hasil simulasi respon getaran vertikal CG pada luffing angle 30 dan
conveying rate 300 t/h ... 77
Gambar 5.19 Hasil simulasi respon getaran vertikal pada DPOB dan DPIB pada
luffing angle 30 dan conveying rate 300 t/h ... 77
Gambar 5.20 Hasil simulasi respon getaran vertikal CG pada luffing angle 30 dan
conveying rate 500 t/h ... 78
Gambar 5.21 Hasil simulasi respon getaran vertikal pada DPOB dan DPIB pada
luffing angle 30 dan conveying rate 500 t/h ... 79
Gambar 5.22 Hasil simulasi respon getaran vertikal CG pada luffing angle 40 dan
conveying rate 300 t/h ... 79
Gambar 5.23 Hasil simulasi respon getaran vertikal pada DPOB dan DPIB pada
luffing angle 40 dan conveying rate 300 t/h ... 80
Gambar 6.1 Respon Getaran DPIB horizontal luffing angle 30 dan
conveying rate 300 t/h ... 83
Gambar 6.2 Respon Getaran DPIB vertikal luffing angle 30 dan conveying
rate 300 t/h ... 84
Gambar 6.3 Respon Getaran DPOB Horizontal luffing angle 30 dan
xii
Gambar 6.4 Respon Getaran DPOB Vertikal luffing angle 30 dan Conveying
Rate 300 t/h ... 85
Gambar 6.5 Respon Getaran DPIB horizontal luffing angle 30 dan conveying
rate 500 t/h ... 85
Gambar 6.6 Respon Getaran DPIB vertikal luffing angle 30 dan conveying
rate 500 t/h ... 86
Gambar 6.7 Respon Getaran DPOB Horizontal luffing angle 30 dan
Conveying Rate 500 t/h ... 86
Gambar 6.8 Respon Getaran DPOB Vertikal luffing angle 30 dan Conveying
Rate 500 t/h ... 87
Gambar 6.9 Respon Getaran DPIB horizontal luffing angle 40 dan conveying
rate 300 t/h ... 87
Gambar 6.10 Respon Getaran DPIB vertikal luffing angle 40 dan conveying
rate 300 t/h ... 88
Gambar 6.11 Respon Getaran DPOB Horizontal luffing angle40 dan
Conveying Rate 300 t/h ... 88
Gambar 6.12 Respon Getaran DPOB Vertikal luffing angle40 dan Conveying
! " # $% !
& ' %!% % ( ' )
# * " %
' %!% % +,, # (
- " " . & ( / 0 ")
( " " " +,, # (
" % ' "1 " ( % ! " "&
')# ' . ) " 0) 2 ) ! " / " 3 #
! " / " #
/ " ( ( ' % ' " 1 " ( ' % +
+, 4 ) " " / ! ( 5 6 '3 7 8
)3 ' 3 '9 73)
3 3 '3 773 9 83 9 .99 ' ) : 3
3:6 3 '6) ' )9 . ;#
1
BAB 1
PENDAHULUAN
1.1 Latar Belakang
PLTU Paiton Baru merupakan salah satu dari beberapa pembangkit
listrik dalam proyek percepatan dan diversifikasi energi PPDE 10 MW yang
dibangun di pulau Jawa. Pembangkit ini terletak di berlokasi di desa Binor,
kecamatan Paiton, kabupaten Probolinggo, Jawa Timur, tepatnya di komplek
PLTU Paiton yang sudah ada (existing). PLTU Paiton Baru memiliki kapasitas 1 x
660 MW dengan bahan bakar batubara kalori rendah. Oleh karena itu, untuk
menjamin kelancaran proses produksi perlu didukung oleh sistem penyimpanan
dan suplai batubara (coal handling system) yang handal.
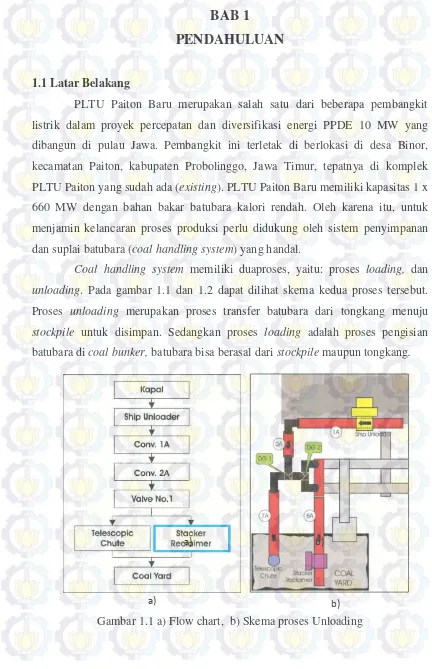
Coal handling system memiliki duaproses, yaitu: proses loading, dan
unloading. Pada gambar 1.1 dan 1.2 dapat dilihat skema kedua proses tersebut.
Proses unloading merupakan proses transfer batubara dari tongkang menuju
stockpile untuk disimpan. Sedangkan proses loading adalah proses pengisian
batubara di coal bunker, batubara bisa berasal dari stockpile maupun tongkang.
Gambar 1.1 a) Flow chart, b) Skema proses Unloading
a) b)
2
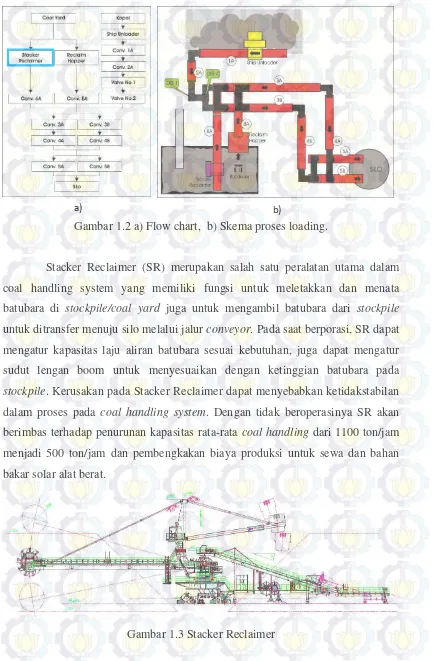
Gambar 1.2 a) Flow chart, b) Skema proses loading.
Stacker Reclaimer (SR) merupakan salah satu peralatan utama dalam
coal handling system yang memiliki fungsi untuk meletakkan dan menata
batubara di stockpile/coal yard juga untuk mengambil batubara dari stockpile
untuk ditransfer menuju silo melalui jalur conveyor. Pada saat berporasi, SR dapat
mengatur kapasitas laju aliran batubara sesuai kebutuhan, juga dapat mengatur
sudut lengan boom untuk menyesuaikan dengan ketinggian batubara pada
stockpile. Kerusakan pada Stacker Reclaimer dapat menyebabkan ketidakstabilan
dalam proses pada coal handling system. Dengan tidak beroperasinya SR akan
berimbas terhadap penurunan kapasitas rata-rata coal handling dari 1100 ton/jam
menjadi 500 ton/jam dan pembengkakan biaya produksi untuk sewa dan bahan
bakar solar alat berat.
Gambar 1.3 Stacker Reclaimer
3
Untuk menjamin keandalan Stacker Reclaimer, PLTU Paiton Baru
menerapkan metode preventive maintenance (PM) dan predictive maintenance
(PdM). Salah satu cara dalam predictive maintenance yang dilakukan yaitu
dengan cara menganalisa spektrum vibrasi dan membandingkan trend yang
terjadi. Pengukuran vibrasi dilakukan secara berkala pada saat peralatan
beroperasi, kemudian menggunakan data pada awal pengukuran sebagai baseline.
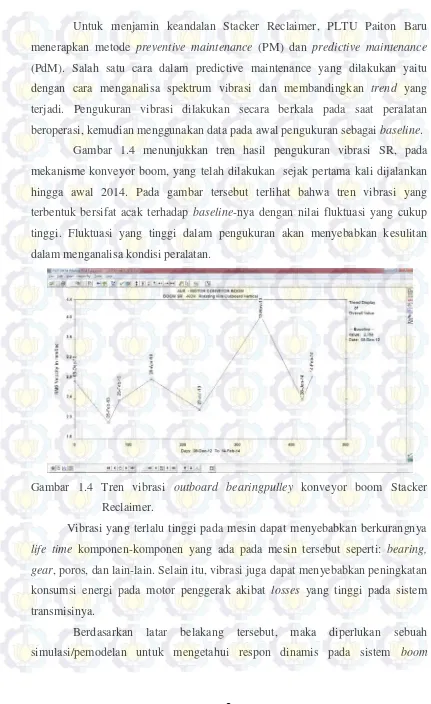
Gambar 1.4 menunjukkan tren hasil pengukuran vibrasi SR, pada
mekanisme konveyor boom, yang telah dilakukan sejak pertama kali dijalankan
hingga awal 2014. Pada gambar tersebut terlihat bahwa tren vibrasi yang
terbentuk bersifat acak terhadap baseline-nya dengan nilai fluktuasi yang cukup
tinggi. Fluktuasi yang tinggi dalam pengukuran akan menyebabkan kesulitan
dalam menganalisa kondisi peralatan.
Gambar 1.4 Tren vibrasi outboard bearingpulley konveyor boom Stacker
Reclaimer.
Vibrasi yang terlalu tinggi pada mesin dapat menyebabkan berkurangnya
life time komponen-komponen yang ada pada mesin tersebut seperti: bearing,
gear, poros, dan lain-lain. Selain itu, vibrasi juga dapat menyebabkan peningkatan
konsumsi energi pada motor penggerak akibat losses yang tinggi pada sistem
transmisinya.
Berdasarkan latar belakang tersebut, maka diperlukan sebuah
4
conveyor dalam beberapa variasi kondisi operasi. Selain variasi kondisi operasi,
pada penelitian ini juga memasukkan variabel support pada pondasi sistem
penggerak conveyor dalam pemodelan, sehingga dapat diamati interaksi antara
gaya eksitasi dan kestabilan sistem tersebut. Hasil pemodelan yang didapatkan
bisa digunakan untuk mengetahui karakteristik respon vibrasi pada beban dan
sudut elevasi yang berbeda.
1.2 Rumusan masalah
Dengan melihat latar belakang yang ada, maka pada penelitian ini dapat
dibuat rumusan masalah sebagai berikut:
1. Bagaimana pengaruh variasi conveying rate terhadap respon getaran sistem
penggerak konveyor boom pada stacker reclaimer.
2. Bagaimana pengaruh variasi luffing angle terhadap respon getaran sistem
penggerak konveyor boom pada stacker reclaimer.
1.3 Tujuan
Adapun tujuan dari penelitian ini adalah sebagai berikut:
1. Mengetahui respon getaran sistem penggerak konveyor boom pada stacker
reclaimer dengan variasi conveying rate.
2. Mengetahui respon getaran sistem penggerak konveyor boom pada stacker
reclaimer dengan variasi luffing angle.
1.4 Manfaat
Berdasarkan tujuan yang ada pada penelitian ini, maka manfaat yang
dapat diambil dari penelitian ini adalah :
1. Memberikan informasi respon getaran sistem penggerak konveyor boom pada
stacker reclaimer dengan beberapa variasi beban.
2. Memberikan informasi respon dinamis sistem konveyor boom pada stacker
reclaimer dengan beberapa sudut kemiringan konveyor.
3. Memberikan referensi bagi bagian predictive maintenance PT. PJB UBJOM
Paiton Baru dalam pemilihan baseline vibrasi pada mekanisme konveyor
5
4. Memberikan informasi bagi operator coal handling system dalam
memprediksi kondisi stacker reclaimer untuk kondisi operasi tertentu.
1.5 Batasan Masalah
Batasan masalah dari penelitian ini adalah:
1. Mesin yang digunakan adalah stacker reclaimer (SR) pada PT. PJB UBJOM
Paiton Baru.
2. Pemodelan hanya dilakukan pada sistem penggerak konveyor boom saja.
3. Titik yang menjadi pengamatan adalah outboard bearing drive pulley
(DPOB), dan inboard bearing drive pulley (DPIB).
4. Eksitasi hanya disebabkan oleh tegangan belt conveyor.
5. Tidak memodelkan dan menganalisa respon getaran pada sumbu z karena
gaya eksitasi yang dipilih tidak bergerak pada arah sumbu z.
6. Respon getaran yang dimati adalah velocity.
7. Tidak membahas kerangka struktur konveyor boom.
8. Tidak memperhitungkan akibat dari ketidaksesuaian assembly dan cacat pada
komponen stacker reclaimer..
6
! "
# $
%
"
"
" &
' ( )
* + , - . ./
0
1
2
0
-/
3 " !
"
% 45 !
3 !
6 7
!
' / 8 . 9 : / 8 6. 9 ( )
; + ,
! " ! 0
1
5 5 - . /
! !
!
& 1
<
' < " (6)
3 ;= !
"
3
.
> - .. /
" "
%
!
' ? !
1 !
"
' ?
6 ; (<)
1 7
A
; 7
! 7
!
7
' " 7
% !
!
' ! !
!
!
"
' !
B "
B " "
!
' 5 , %!
!
B
" "
!
7 *
- / - / - /
<
- / !
' 2
' 2 (6)
/ # '
' "
7 - /
3 "
$
- /
" $
- /
$
" 8 " -3 >/
* 8 - /
D 8 - C /
E 8 6 <
# F - / 3 >
-4 5/ # ,
?
" D 8 E" "
" 3 >
! 8 - E" / - 6/
8 E" - E" / - </
" 8 7- E"/ - E" / - @/
6 < @ 7
" 3
" ! '
' 3 " (6)
/ # '
" "
"
" "
' .
7 "
7 7
, A
2.H - 8 6?.H/ =
" 2.
' . , " 2. (6)
# $ % %
7 ,
7
, !
/ ! 7
!
!
!
7 ' - /
"
,
2
- / - /
' 1=# - / * : - / 4 ( )
/ !
!
1
'
0
,
7
0- /
I- /
7 ! 7 ' 6
&
"
# , 1 -#,1/
! $
' 6 # , 1 1=# (6)
1 " !
- /
# 8 &
' ! ( ) * +
;
1J
3 ;
3
8 . 3
3 ; A
? # !
. 1J
"
1J
" " 7
' < ! - /
- / (6)
1J
! 7
- /
1 $ 8
8
8
8
" "
,
!
' @ 5 5 # ! ( )
@- / 0- /
I- / ! $
2
1 -F'/ $
K $
.
@- / - /
K $
6
!
$
<
, )
$
$
A
$
& "
8
' 7
7 7
6
6 , 7
7
" !
< , 7 " !
%
$
% " &
% ' & ! - @/
7 $
: : :
0 " , 0 " F
0 " 1 0 " 5 7
$
:
$
% !
@
1 - L / " -" /
"
'
' .
; - L /
! ' ?
' ? K
( )
! < $
'
-) 8 / -F 8 ' /
- / !
' !
?
' F ' " ' !
*
-)M / -F M' /
- / , ' 2 "
' 2 F ' " *
+
-. N)N / -F N' /
' F ' " +
+
-) 8 ./ "
7 :
"
" /% 0 1
, F " "
A $
5
5 !
6 5
< 5 !
2 A
. $
' .
" A
!
- / , $ 1 !
! $
, F "
1
7
,
, ! "
! $
-- 5
- '
-, "
!
' '
- - - >
-!
'
-6 - . - 5 !
6.
' 6.
A
-' <
' < / A / /
-0
0 "
! " $
1 !
B
1 ! 0
;
3 !
, F !
, 0
6
A
6 ,
< $ 0 " !
@ 0 " !
' @0
/ ! $
! $ , "
!
" ( + $ 1
/ * O" " -* /
A " " $
*0 8 * - /
*08 P 0 A00 A
* 8 * " 0 - /
* 8 P 0 A 0 + 0 A
66
/ # K"
/
# A * -A /* " 0
' ? ! A
' ? ' " A* (<)
/ # -A0/
A0 $
A08 . ...?2 -+ Q + / Q - C" / 6
1
8 @ ?7 &
8 2 @7 &
8 6 <7 &
8 < 7 &
8 2 27 &
6/ # - -A /
A " 0
" 0
"
6<
* # A (<)
</ * -* /
*
6@
* # * (<)
@/ * -* /
$
2
* *
* 8 * Q 3 + 66
* 6
* 6! 0 " (<)
* * 7 C
!
6 C *
$
* 8 6 - / 6<
1 8 - /
* *
* 8 - F P / Q - ? P / - / 6@
1 F 8 # <
6? 3 8
8. 0 - /
* < # # F (<)
* 8 * Q * * Q * 6?
/ 1 ,
1 " " *
- / 6
1 8 1 - /
* 8 * - /
8 A -" /
/ + # -F /
+ " " "
* *
" ! *
*
6
* 8 C 7 - /
* 8 7 - /
8 8 2
" 8 "
-. @ . 6@ /
T 8 " - @/
T 8 6
* @ + # F (<)
/
% ! !
!
8
<.*
$
% 6U *.8 < - + Q + /
% U *.8 ? @ - + Q + /
62
"/ , -**%/
4 7 $
**%8 - / <
1 $
* 8 * 7 *
* 8 . . @ P +
* 8 3 +
' , + 3
# ! %
5 "
"
! !
1
3
! !
6
' 2 F
!
& 2 %
& = .2 ?7
+
-/ !
<.