TUGAS AKHIR
Oleh
Alvien Permana Putra 1401114202
Dini Pratiwi 1401130181
Priyangkah Hartawan Sim 1401115243
UNIVERSITAS BINA NUSANTARA
JAKARTA
TUGASAKHIR
diajukan sebagai salah satu syarat untuk gelar kesarjanaan/diploma pada
Jurusan Sistem Komputer Jenjang Pendidikan Strata-1
Oleh
Alvien Permana Putra 1401114202
Dini Pratiwi 1401130181
Priyangkah Hartawan Sim 1401115243
UniversitasBina Nusantara
Jakarta
Halaman
Halaman Sampul ... i
Halama Judul ... ii
Halama Pesetujuan Dosen Pembimbing ... iii
Halaman Pernyataan Dewan Penguji ... iv
Halaman Pernyataan Persetujuan Publikasi LTA ... vii
Abstrak ... viii
Daftar Isi... x
Daftar Tabel ... xii
Daftar Gambar ... xiii
Daftar Lampiran ... xvi
BAB 1 PENDAHULUAN 1.1 Latar Belakang ... 1
1.2 Rumusan Masalah ... 4
1.3 Tujuan dan Manfaat ... 4
1.3.1 Tujuan Penelitian ... 4
1.3.2 Manfaat Penelitian ... 5
1.4 Ruang Lingkup ... 5
1.5Sistematika Penulisan ... 6
BAB 2 LANDASAN TEORI 2.1Gambar Digital ... 7 2.2 Pencahayaan ... 9 2.3 Image Enhancement ... 11 2.3.1 Masking ... 11 2.3.2 Contrast Stretching ... 14 2.3.3 Histogram ... 15 2.3.4 Thresholding ... 16 2.4Segmentasi ... 17 2.4.1 Region Growing ... 17
2.4.2 Segmentasi pengaruh pencahayaan ... 19
BAB 3 METODE PERANCANGAN
3.1 Perancangan ... 27
3.1.1 Kondisi fisik citra ... 28
3.1.2 Illumination incident ... 30
3.1.3 Karakteristik kamera ... 33
3.2 Model Segmentasi ... 33
3.2.1 Pengambilan gambar ... 33
3.2.2 Proses Segmentasi Region Growing ... 34
3.2.3 Proses Segmentasi dengan Edge Suppresing ... 40
3.3 Pengembangan Algoritma ... 43
3.3.1 Perbandingan metode Region Growing dan metode Edge Suppressing ... 43
3.3.2 Perbaikan metode Edge Suppressing ... 46
BAB 4 HASIL DAN PEMBAHASAN 4.1 Kerangka percobaan ... 55
4.2 Spesifikasi sistem ... 56
4.3 Prosedur operasional ... 57
4.4Implementasi ... 62
4.5Evaluasi ... 65
4.5.1 Analisa intensitas cahaya dan variabel objek ... 65
4.5.2 Analisa Intensitas Cahaya dan Variabel Background ... 74
BAB 5 SIMPULAN DAN SARAN 5.1 Kesimpulan ... 89
5.2 Saran ... 89 DAFTAR PUSTAKA
LAMPIRAN
Puji dan Syukur penulis panjatkan kepada Tuhan Yang Maha Esa atas karunia dan rahmat – Nya sehingga penulis dapat menyelesaikan buku laporan tugas akhir ini dengan judul “ Segmentasi Objek Dibawah Pengaruh Pencahayaan”, dan sebagai salah satu persyaratan dalam menyelesaikan program sarjana Strata 1.
Penulis mengucapkan terima kasih kepada Bapak Prof. Dr. Ir. Harjanto Prabowo, M.M. selaku rektor Universitas Bina Nusantara. Penulis juga berterima kasih kepada Ibu Dr. Ho Hwi Chie, M.Sc. selaku Dekan Fakultas Teknik dan Bapak Endra, S.Kom., M.T. selaku Ketua Jurusan Sistem Komputer. Serta penulis berterima kasih yang sebesar-besarnya kepada Bapak Iman H. Kartowisastro, Ph.D selaku dosen pembimbing yang telah membimbing penulis selama proses penelitian ini berlangsung hingga selesai. Selain itu penulis juga mengucapkan terima kasih kepada seluruh jajaran dosen serta pengajar Jurusan Sistem Komputer yang telah memberikan ilmunya hingga penulis dapat mengerjakan penelitian ini. Penulis juga sangat berterima kasih kepada kedua orang tua, saudara kandung, dan teman-teman yaitu Andrew Tanamas, Yan, Lilianto, Arief Ambiya, Mitsu, Rahman, Steven, Aji, Andrew Wijaya, Agnes, Nizar, Egy, Arief, Arie Alfred, dan John yang telah memberikan dukungan dan doa kepada penulis. Tidak lupa pula penulis berterima kasih kepada seluruh pihak-pihak yang telah terlibat dalam penyelesaian laporan tugas akhir ini yang tidak dapat penulis sebutkan satu-persatu.
Sebagai penutup, penulis menyadari bahwa penelitian ini masih belum sempurna dan mengharapkan agar penelitian ini dapat diteruskan oleh rekan-rekan yang berminat dalam penelitian ini. Dengan perbaikan-perbaikan yang diberikan, penulis berharap penelitian ini dapat bermanfaat bagi kita semua, akhir kata penulis memohon maaf apabila terdapat kesalahan kata-kata pada laporan ini.
Hormat kami,
1 1.1 Latar Belakang
Robot merupakan salah satu teknologi yang saat ini sedang berkembang pesat di dunia. Robot merupakan salah satu teknologi yang saat ini sedang berkembang pesat di dunia. Berdasarkan laporan International Federation of
Robotics, jumlah robot industri yang beroperasi di seluruh dunia pada tahun 2012
berkisar antara 1.235.000 sampai 1.500.000 unit. Robot banyak digunakan di industri untuk menggantikan pekerjaan manusia dalam manufacturing, yang tidak hanya operasi fisik tetapi juga mencangkup proses kecerdasan untuk mengolah informasi dalam suatu keadaan. Berdasarkan Intenational Standard
Organization, robot merupakan benda yang dapat bekerja secara otomatis, dapat
melaksanakan tugas yang berbeda, dapat diprogram ulang, memiliki kecerdasan, dan dapat memperoleh informasi dari lingkungan.
Dalam mengenali lingkungan di sekitar robot, vision menjadi yang penting dalam industrial robot maupun service robot. Salah satu aplikasi vision yang dipakai pada service robot adalah mobile robot yang dapat melakukan
tracking (Moreno, Munoz, Garrido, dan Martin, 2007). Robot vision merupakan
aplikasi pada robot dimana robot dapat mengenali lingkungan di sekitar robot tersebut secara visual. Vision merupakan teknologi dalam mengolah citra yang diperoleh dari kamera untuk menghasilkan informasi yang disampaikan dari citra tersebut dengan menggunakan komputer dan kamera. Vision atau kemampuan visual pada robot memiliki peran yang penting pada sistem robot karena dapat memberikan informasi kondisi lingkungan ketika robot sedang berinteraksi dengan lingkungannya.
Robot membutuhkan sensor untuk mengenali lingkungan sekitarnya. Salah satu sensor yang dapat digunakan pada robot yaitu kamera. Kamera memiliki keunggulan dibandingkan sensor lainnya yaitu lebih fleksibel dalam aplikasinya input data citra objek dan memberikan kemungkinan lebih besar untuk memberikan informasi yang berbeda (Collewet, 2011). Walaupun kamera merupakan sensor yang baik pada robot, akan tetapi pengaruh perubahan lingkungan membuat kamera menjadi sulit diaplikasikan pada robot karena kamera sensitive terhadap variasi pencahayaan. Komponen data dari sebuah citra berupa warna yang dipengaruhi pencahayaan dapat dianalisa sehingga didapatkan sebuah boundary yang akan diproses dengan algoritma adaptive untuk segmentasi warna (Kuo-Yang Tu, 2009).
Proses segmentasi yaitu memisahkan objek dari latar belakang merupakan sesuatu yang penting dalam vision dan akan menjadi sulit ketika kondisi pencahayaan tidak merata diberikan pada citra yang ditangkap kamera. Teknik homomorphic filtering yang dikombinasikan Top-Hat Transformation dan watershed segmentation dapat menyelesaikan masalah segmentasi citra dalam kondisi pencahayaan yang tidak merata pada suatu citra (Wen-Cheng, Xiao-Jun, 2013). Transformasi Top-Hat mendeskrpsikan struktur dasar citra dengan menggunakan beberapa transformasi yang dikombinasikan.
Bayangan benda menjadi suatu masalah dalam segmentasi citra ketika kondisi pencahayaan berubah-ubah (Koh, Miles, Morgan, Gill, 2007). Pencahayaan dengan gelombang yang berbeda diproyeksikan dari posisi yang berbeda sehingga menyebabkan benda terlihat overlap karena pengaruh dari timbulnya bayangan benda tersebut.
Segmentasi menjadi hal yang penting dalam sistem pengenalan lingkungan sekitar robot oleh kamera pada vision disebut dengan recognition dapat diaplikasikan pada mobile robot salah satunya dengan algoritma seed-fill (Hai-bo, Yu-Mei, Yu-Jie, 2010). Algoritma ini menggunakan real time segmentation colour vision pada tahap awal dalam sistem vision tersebut. Color
image segmentation tersebut dikembangkan dengan algoritma seed-fill pada
Deteksi objek yang berjalan disertai warna latar belakang yang bervariasi tidak dapat menghasilkan output yang baik jika tidak disertai proses segmentasi yang baik (Stolkin, Florescu,baron,Harrier, Kocherov, 2008). Deteksi objek dengan menggunakan algoritma Adaptive Background CAMSHIFT (ABCshift) dapat digunakan untuk object tracking yang bergerak dengan background yang berubah-ubah dengan variasi warna yang mempunyai warna yang hampir sama dengan objek yang dideteksi. Algoritma ABCshift ini merupakan hasil penyempurnaan dari algoritma CAMshift yang mempunyai kelemahan yaitu tidak dapat merepresentasikan perubahan background yang bervariasi. Kelebihan
ABCshift algoritma dapat bekerja lebih cepat jika dibandingkan dengan CAMshift
dan dapat membedakan antara objek dan background yang memiliki warna yang sama, karena algoritma ABCshift memiliki proses segmentasi yang lebih baik dibandingkan proses segmentasi pada algoritma CAMshift.
Metode segmentasi split and merge dengan distribusi Log-Normal merupakan teknik segmentasi dengan histogram split merge (Reyad, El-Zaart, Mathkour, Al-Zuair, 2010). Metode ini sedikit berbeda dengan metode normal
split merge, yang menggunakan dua tahap yaitu memisah gambar menjadi
beberapa bagian kemudian menggabungkannya.
Salah satu penelitian segmentasi (Almaddah, Mae, Ohara, Takubo, Arai, 2011) mengenalkan teknik segmentasi dengan kondisi pencahayaan yang berbeda. Penelitian tersebut membahas segmentasi objek dengan memperhatikan pengaruh cahaya yang diberikan pada objek yang dideteksi. Teknik segmentasi ini yaitu memberikan pencahayaan pada sudut dan panjang gelombang yang berbeda yang diproyeksikan pada robot. Penelitian ini dilakukan untuk melakukan segmentasi pada berbagai objek mengidentifikasi latar belakang objek dan memisahkan antara latar belakang dan objek yang digunakan. Untuk memisahkan latar belakang dan objek, maka objek akan diberikan multiple light, yaitu memberikan cahaya dengan frekuensi yang berbeda-beda.
Segmentasi citra dengan kondisi pencahayaan beragam untuk kondisi objek yang berada dekat dengan sumber cahaya telah dikembangkan dengan
metode yang terdiri dari dua tahap rectangular segmentation dan segmentasi dibawah sumber cahaya (Sato, Okabe, dan Yoichi, 2006). Dengan asumsi pencahayaan terarah, metode ini menggunakan analogi Principal Component
Analysis (PCA) dan menggunakan dua macam pendekatan untuk menganalisa
objek yang berada dekat dengan sumber cahaya.
Melalui pengamatan yang telah dilakukan dari penelitian-penelitian sebelumnya, segmentasi merupakan tahap dasar pada pengolahan citra yang sangat penting dan berpengaruh untuk penelitian lebih lanjut pada deteksi objek. Selain itu perubahan intensitas cahaya dan variasi background memberikan pengaruh terhadap proses segmentasi. Oleh karena itu perlu dilakukan penelitian lebih mendalam mengenai proses segmentasi yang berkaitan dengan pengaruh pencahayaan serta keragaman warna dan tekstur objek yang digunakan pada proses segmentasi.
1.2 Rumusan Masalah
• Bagaimana pengaruh perubahan intensitas cahaya pada lingkungan sekitar terhadap keberhasilan proses segmentasi objek?
• Bagaimana kondisi objek background yang memiliki warna dan tekstur bervariasi berpengaruh terhadap sistem segmentasi?
• Bagaimana kondisi objek foreground yang memiliki warna, tekstur dan bentuk bervariasi berpengaruh terhadap sistem segmentasi?
1.3 Tujuan dan Manfaat
1.3.1 Tujuan Penelitian
Membuat sistem segmentasi dengan memperhatikan faktor permasalahan yaitu :
• Kondisi objek pada background yang memiliki warna dan tekstur yang bervariasi
• Kondisi objek pada foreground yang memiliki warna, tekstur dan bentuk bervariasi
1.3.2 Manfaat Penelitian
• Sebagai dasar untuk penelitian lebih lanjut ke tahap deteksi objek yang dapat digunakan oleh robot RV-M1
• Dalam industri untuk kedepannya dapat dipalikasikan untuk memilah objek yang diinginkan yang tidak rentan terhadap perubahan intensitas
• Untuk ke depannya dalam bidang perikanan dapat diaplikasikan untuk proses sorting ikan dengan memisahkan ikan dari lingkungan sekitar berupa batuan, dan tumbuhan air
1.4 Ruang lingkup
Ruang lingkup dari penelitian ini yaitu pengambilan gambar objek yang akan dideteksi dengan kamera dengan batasan :
• Kondisi pengambilan citra dilakukan di dalam ruang tertutup.
• Intensitas cahaya dari 10 lux sampai 1100 lux.
• Posisi kamera terhadap objek dengan memperhatikan wilayah pengambilan gambar terbatas ruang yang dapat dijangkau (work volume ) oleh robot RV-M1 yaitu jarak maksimal yang dapat dijangkau oleh robot RV-M1 adalah 40 cm.
• Objek tidak bergerak.
• Objek untuk background yaitu buku, hansaplast, kotak balsam berwarna jingga berbentuk persegi panjang, dan pemantik api berwarna biru berbentuk tidak beraturan.
1.5 Sistematika Penulisan
BAB 1 : PENDAHULUAN
Bab 1 berisi latar belakang yaitu kondisi dan pencapaian terkini terhadap hal yang terkait dengan topik skripsi ini, tujuan dan manfaat yang dihasilkan oleh skripsi ini, serta permasalahan yang ada untuk diselesaikan dalam skripsi ini, dan batasan lingkup kegiatan yang dilakukan dalam skripsi ini.
BAB 2 : LANDASAN TEORI
Bab 2 berisi teori terkait yang digunakan pada skripsi ini, ulasan dari pencapaian terkini yang diperoleh dari artikel ilmiah yang terkait dengan topik skripsi, algoritma yang digunakan dalam perancangan sistem.
BAB 3 : METODE PERANCANGAN
Bab 3 berisi konsep, proses yang dilakukan dalam merancang sistem, dan tahapan proses perancangan segmentasi.
BAB 4 : HASIL DAN BAHASAN
Bab 4 berisi gambaran umum percobaan yang dilakukan, cara memperoleh data dan melakukan analisa terhadap proses segmentasi yang terjadi.
BAB 5 : SIMPULAN DAN SARAN
Bab 5 berisi simpulan hasil ulasan yang dapat menjawab rumusan masalah dan saran untuk pengembangan lebih lanjut terhadap sistem yang dirancang saat ini.
7 BAB 2
LANDASAN TEORI
2.1 Gambar Digital
Gambar digital merupakan suatu citra yang telah didiskritkan memiliki koordinat spatial yang dinyatakan dalam dua dimensi integer array. Suatu gambar f(x, y) disampling sehingga menghasilkan gambar digital yang memiliki baris yang dinyatakan dalam M dan jumlah kolom yang dinyatakan dalam N seperti yang terlihat dalam gambar 2.1. Nilai koordinat (x, y) yang disampling tersebut akan menjadi nilai-nilai diskrit, sehingga digunakan nilai
integer untuk koordinat diskrit tersebut. Setiap elemen dinyatakan dalam matrix array yang disebut dengan pixel. (Gonzalez dan Woods, 2001 :
52-55).
Gambar 2.1 Koordinat gambar digital (Sumber : Gonzalez dan Woods, 2001)
Suatu pixel dinyatakan dengan p memliliki koordinat (x, y) yang mempunyai empat tetangga secara horizontal dan vertical, dimana koordinat tersebut dinyatakan dalam persamaan (1):
Beberapa tipe gambar digital adalah gambar YUV dan RGB (Red,
Green, Blue). Gambar warna YUV diciptakan untuk membuat siaran televisi
berwarna dengan receiver TV hitam putih. Di dalam koordinat warna YUV terdiri atas komponen Y, komponen Cb, dan komponen Cr, dimana komponen Y biasanya disebut the luminance dan komponen Cb, dan Cr biasanya disebut chrominance. Pengertian dari the luminance adalah kecerahan yang diterima dari cahaya, yang sebanding dengan total energi dalam visible band. Sedangkan chrominance merupakan gambaran akan nuansa warna dari cahaya, yang tergantung pada komposisi panjang gelombang cahaya chrominance.
Gambar YUV biasanya dipakai dalam menampilkan campuran warna dari komponen luminance dan chrominance. Dalam pengaplikasiannya gambar YUV, diharapkan dapat menggambarkan warna dalam hal luminance dan chrominance secara terpisah agar dapat mengefisienkan proses.
Untuk mendapatkan tujuan dari aplikasi ini, tiga komponen koordinat warna telah dikembangkan, di mana salah satu komponen merupakan
luminance dan dua lainnya merupakan bagian chrominance yaitu hue dan saturation. Kesatuan koordinat tersebut adalah warna YUV (Yi Wei, 2008).
Untuk mencari nilai dari YUV di dapat dari persamaan (2):
(2)
Untuk mencari nilai RGB dapat dicari dengan menggunakan inverse dari persamaan (2). Gambar dari RGB ke YUV dapat dilihat di gambar 2.3
Gambar 2.2 Tampilan gambar RGB (a), Y (b), U (c), dan V (d)
(Sumber : Yalman, Erturk, 2013)
2.2 Pencahayaan
Cahaya yang mengenai permukaan dapat dipantulkan oleh permukaan atau dibiaskan melewati permukaan ke suatu material atau bahan (Stainvas, Lowe, 2003). Ketika melewati suatu material, pencahayaan dapat dipancarkan, diserap dan disebarkan oleh material. Banyaknya cahaya yang dipantulkan oleh objek bergantung pada jenis permukaan objek tersebut (I. Sato, Y. Sato, Ikeuchi, 2002).
Pengaruh kuatnya pencahayaan dapat menentukan keberhasilan segmentasi, karena itu perlu dilakukan pemodelan pencahayaan suatu citra dengan persamaan fisik (Gonzalez, 2002). Suatu citra memiliki energi yang diradiasikan yang jumlahnya proporsional dengan sumbernya, sehingga menghasilkan persamaan (3) (Gonzales dan Woods, 2001: 50) :
Fungsi terdiri dua komponen, yaitu , banyaknya
pencahayaan (illumination) yang mengenai scene, dan , banyaknya
pencahayaan yang dipantulkan (reflection) oleh objek pada scene tersebut, sehingga :
(4) (5) (6)
Persamaan (6) merepresentasikan nilai batasan reflektansi, yaitu nilai paling kecil adalah 0, yang menyatakan semua pencahayaan diserap oleh objek, dan nilai reflektansi paling besar yaitu 1, menyatakan semua pencahayaan dipantulkan oleh objek. Sehingga ditentukan dari
sumber pencahayaan dan karakteristik dari objek pada citra seperti pada persamaan (4). Pada persamaan (6) jika nilai mendekati 0, maka merepresentasikan objek berwarna gelap, seperti hitam. Sebaliknya jika nilai mendekati 1, maka merepresentasikan objek berwarna terang, seperti kuning.
Bagian dari pencahayaan terpencar yang berasal dari objek tersebut menyebabkan diffuse reflection. Penelitian ini menghitung besarnya pencahayaan yaitu illuminance dengan satuan lux (lx).
Ada tiga tipe pemantulan cahaya yaitu specular, spread, dan diffuse. Pemantulan spread terjadi ketika permukaan yang tidak rata memantulkan cahaya lebih dari satu sudut. Pemantulan diffuse terjadi ketika permukaan yang kasar memantulkan cahaya dengan sudut yang berbeda-beda. Pemantulan diffuse biasa disebut Lambertian scattering. Pemantulan specular terjadi ketika besarnya sudut dari sumber cahaya yang datang menuju permukaan sama dengan besarnya sudut yang dipantulkan oleh permukaan. Ketika cahaya mengenai permukaan yang tidak rata atau kasar, cahaya akan dipantulkan dengan banyak arah yang berbeda-beda dalam satu waktu (Jahne, 2004).
Pemantulan ini disebut dengan diffuse atau scattering. Banyaknya pemantulan diffuse yang terjadi ketika pencahayaan mengenai permukaan
ditentukan oleh dua faktor, yaitu perbedaan refractive index antara dua material atau bahan, dan ukuran serta bentuk dari partikel pada material atau bahan dibandingkan dengan panjang gelombang cahaya. Salah satu metode mendeskripsikan diffusion yaitu Bidirectional Scatter Distribution Function (BSDF) (Jepson, 2008).
Illuminance merupakan ukuran dari photometric flux per unit area.
Illuminance dihitung dengan satuan lux (lm/m2). Sedangkan incident
radiance merupakan ukuran dari radiometri yang dinyatakan dengan flux per
unit area yang diterima oleh permukaan.
2.3 Image Enhancement
Pemrosesan gambar digital yang disebut sebagai image processing memiliki beberapa level, yaitu low level dan high level. Tahap low level terdiri dari image enhancement. Image enhancement yaitu meningkatkan informasi pada suatu citra untuk menghasilkan kualitas citra menjadi lebih baik. Image enhancement memiliki dua macam metode yaitu metode spatial
domain dan metode frequency domain (Maini dan Aggarwal, 2010). Metode frequency domain akan mentransformasikan gambar ke dalam domain
frekuensi dengan transformasi Fourier, berbeda dengan metode spatial
domain yang menggunakan teknik masking seperti terlihat pada gambar 2.3.
Metode spatial domain memanipulasi nilai-nilai pixel pada gambar untuk menghasilkan sebuah citra baru dengan efek yang berbeda. Hasil gambar baru yang diperoleh dari metode spatial domain didapat dengan menghitung nilai pixel sekelilingnya serta menggunakan konvolusi dua dimensi.
2.3.1 Masking
Metode spatial domain menggunakan teknik masking yang dapat menghasilkan efek citra menjadi blur, kontras, dan filter gambar. Suatu citra terdiri dari banyak pixel, yang setiap pixelnya memiliki intensitas warna yang berbeda. Teknik masking yaitu
memanipulasi intensitas dari setiap pixel pada citra agar menghasilkan suatu citra baru dengan nilai intensitas pixel yang berbeda.
Masking dilakukan dengan melakukan konvolusi antara
matriks kernel dan pixel-pixel pada citra. Kernel merupakan matriks kecil yang dapat digunakan pada konvolusi gambar. Kernel yang biasa digunakan adalah matriks 3x3 seperti pada terlihat pada gambar 2.3.
Gambar 2.3 Masking dan matriks kernel (Sumber : Ludwig, 2003)
Konvolusi pada image processing merupakan sebuah persamaan integral dari dua fungsi yang digunakan pada teknik
masking. Dua fungsi yang diintegralkan pada masking tersebut yaitu
matriks kernel, biasanya bertipe matriks 3 x 3 dan matriks pixel pada gambar (Kim dan Casper, 2013). Konvolusi masking diaplikasikan pada tahap filter gambar dalam image enhancement (Kokaram).
Filter yang paling banyak digunakan yaitu median filter karena efektif
Gambar 2.4 Proses masking dimana gambar asli (a), gambar
Gambar 2.4 Proses masking dengan nilai warna yang dimasking (b), gambar dengan kernel 3x3 yang dimasking (c), dan gambar
output (d)
(Sumber : Ludwig, 2003)
Gambar 2.4 menunjukan hasil dari proses masking yang menghasilkan citra dengan nilai yang lebih kontras dari gambar sebelumnya. Citra sebelah kiri merupakan citra asli yang belum dimanipulasi pixelnya. Sedangkan citra sebelah kanan merupakan gambar yang sudah diubah nilai intensitas pixelnya melalui proses
masking. Nilai matriks kernel yang digunakan untuk teknik masking,
bergantung dari efek yang ingin dihasilkan pada citra. Untuk menghasilkan efek blur pada citra maka digunakan nilai matriks
kernel yang berbeda.
Teknik masking diaplikasikan untuk filter citra yaitu median
filter, yang dapat digunakan untuk memperhalus kualitas suatu citra
dari salt and pepper noise, impulse noise dan Gaussian noise.
Median filter dapat dilakukan dengan teknik masking yaitu dengan
mengganti nilai pixel yang masih mengandung noise menjadi nilai
pixel yang baru. Teknik masking median filter dilakukan dengan
mengganti nilai setiap pixel menjadi nilai tengah dari nilai-nilai pixel yang telah diurutkan, seperti terlihat pada gambar 2.5.
Gambar 2.5 Median Filter (Sumber : Ludwig, 2003)
Satu nilai pixel baru didapatkan dengan mengambil nilai pixel tersebut dan delapan pixel disekelilingnya. Sembilan nilai pixel tersebut akan diurutkan dari nilai yang terkecil sampai nilai yang terbesar. Nilai tengah dari urutan tersebut akan diambil untuk menggantikan nilai pixel yang baru.
2.3.2 Contrast Stretching
Contrast stretching untuk membuat intensitas pixel pada citra
semakin kontras. Contrast stretching dinyatakan dengan persamaan (7) :
s = T(r) (7)
s merupakan citra r yang dinyatakan dengan f(x,y) yang telah mengalami transformasi. Contrast stretching merupakan fungsi transformasi gray level yang menghasilkan citra dengan kontras yang tinggi dengan tingkat kegelapan di bawah m dan tingkat keterangan di
atas m. Warna abu-abu gelap pada citra akan diubah menjadi abu-abu terang agar perbedaan warna intesitas pixel yang gelap dan terang terlihat lebih jelas dibandingkan sebelumnya seperti terlihat pada gambar 2.6.
Gambar 2.6 Metode Contrast Stretching Sumber : Gonzalez (2002)
2.3.3 Histogram
Histogram adalah grafik yang menyatakan distribusi pixel
terhadap intensitas dari sebuah citra. Histogram menggambarkan distribusi setiap pixel dengan gray value yang terkandung pada citra. Sumbu y pada histogram menyatakan jumlah pixel yang terkandung pada citra, sedangkan sumbu x menyatakan tingkat intensitas setiap
pixel dari gelap sampai terang (Cimbala, 2013).
Gambar 2.7 histogram gambar 8 bit (Sumber: Bouman, 2009)
Gambar 2.7 adalah contoh histogram gambar 8 bit dengan nilai intensitas pixel dari nol sampai 255. Intensitas pixel yang bernilai nol adalah intensitas pixel dengan kondisi paling gelap. Sedangkan intensitas pixel bernilai 255 merupakan kondisi paling terang pada
pixel gambar (Bouman, 2009).
2.3.4 Thresholding
Thresholding merupakan metode partisi citra menjadi
beberapa nilai intensitas pixel. Threshold dapat menjadi salah satu metode yang dapat digunakan untuk segmentasi citra. Thresholding mengubah grayscale image menjadi binary image sehingga objek terpisahkan dari background pada gambar 2.8 yang dinyatakan pada persamaan (8).
(8)
Keuntungan menjadi citra biner yaitu mengurangi kompleksnya data dan menyederhanakan pemrosesan citra untuk tahap pengenalan atau recognition (Al-amri, Kalyankar, Khamitkar, 2010). Thresholding menganalisa distribusi grayvalue pada citra yang dinyatakan dengan histogram. Thresholding dapat menentukan karakteristik intensitas antara objek dan latar belakang objek. Terdapat dua macam metode thresholding, yaitu global thresholding dengan nilai threshold T adalah konstan, dan lokal thresholding yang dapat dipakai saat kondisi background bervariasi.
Gambar 2.8 Contoh thresholding dengan gambar asli (a), gambar sesudah di thresholding (b)
(Sumber : Moravcik, 2009)
2.4 Segmentasi
Segmentasi merupakan proses memisahkan pixel-pixel yang terkandung pada suatu citra, menjadi suatu kelompok dari pixel-pixel yang bersifat homogeneous. Proses segmentasi terbagi menjadi dua macam, yaitu segmentasi region dan segmentasi edge (Jain, Katsuri, Schunck, 1995: 73). Segmentasi region merupakan proses segmentasi dengan pengelompokkan
pixel-pixel pada citra menjadi suatu region-region. Semua pixel yang
memiliki karakteristik yang sama akan dikelompokkan bersama sebagai suatu
region.
2.4.1 Region Growing
Segmentasi citra menggunakan algoritma region growing, yaitu metode segmentasi berbasiskan region segmentation dengan mengolompokkan pixel-pixel yang memiliki karakteristik yang sama, berupa intensitas pixel sehingga membentuk region yang merepresentasikan objek dari suatu citra. Pengelompokkan pixel-pixel ini bertujuan untuk memisahkan objek dari latar belakangnya pada suatu citra. Nilai intensitas setiap pixel pada citra akan memengaruhi
Algoritma region growing yang dimulai dengan seed points yang mewakili dari suatu region. Seed points akan berkembang ke
pixel tetangga yang memilliki karakter yang hampir sama sampai
membentuk suatu bagian (region).
Segmentasi merupakan proses membagi citra R menjadi n subregion, yaitu R1, R2, … Rn ,dengan persamaan (Gonzalez dan
Woods, 2001):
(9)
Persamaan (9) menjelaskan proses segmentasi harus komplit yaitu semua pixel harus masuk dalam katagori region-region yang dibuat. Selain itu, semua pixel yang berada pada Ri memiliki nilai gray level yang sama. Ri merupakan region yang saling berkoneksi, dengan i = 1, 2, .. n.
(10)
Persamaan (10) menjelaskan semua region harus diuraikan. Sifat pixel harus terpenuhi ketika pixel disegmentasi menjadi region yang dinyatakan dalam persamaan (11) :
(11)
yaitu P(Ri) benar jika pixel pada region i memiliki nilai intensitas yang kurang lebih sama.
Seed point yang berada pada citra f, memiliki koordinat (x, y)
dengan grayvalue = f(x, y). Region growing menggabungkan
pixel-pixel dengan kriteria range grayvalue menjadi suatu region menjadi
nilai intensitas pixel h. Mekanisme region growing dimulai dari seed
point S(x,y) dengan nilai intensitas pixel yang sudah ditentukan pada
koordinat tertentu pada suatu citra. Seed point S(x,y) akan berkembang (growth) dengan memeriksa nilai intensitas pixel tetangga dengan menggunakan arah 8-connectivity.
Pixel tetangga akan masuk menjadi satu region Ri jika selisih
nilai pixel tetanggga dan seed point lebih kecil dari nilai threshold. Nilai maksimum gray value pada Ri ditentukan dari nilai threshold.
H(x,y) = TRUE, if (12) Nilai threshold didapatkan dari analisa histogram masing-masing objek dan histogram latar belakang. Histogram kedua objek yang diambil oleh kamera secara terpisah.
Dengan melihat hasil histogram latar belakang dan histogram objek maka dapat menentukan nilai threshold yang akan digunakan pada proses segmentasi. Growing atau berkembangnya seed point ke
pixel tetangga, akan berhenti jika tidak ada pixel yang memenuhi
kriteria dari karakter suatu region Ri.
2.4.2 Segmentasi pengaruh pencahayaan
Penelitian mengenai segmentasi telah dilakukan dalam beberapa tahun ini. Dengan memperhatikan pengaruh pencahayaan, algoritma segmentasi telah dikembangkan seperti pada penelitian
Effects of Image Segmentation for Approximating Object Appearance Under Near Lighting (Sato, Okabe and Yoichi, 2006). Metode yang
digunakan pada penelitian Okabe mengenalkan cara segmentasi citra dengan asumsi pencahayaan yang terarah. Algoritma yang digunakan terdiri dari dua kriteria. Kriteria pertama single point light source yaitu objek yang akan disegmentasi diberikan cahaya dengan dengan sumber cahaya terpusat dengan frekuensi yang tinggi.
Kriteria kedua adalah general illumination condition yaitu objek diberikan cahaya dengan kondisi sumber cahaya yang normal. Algoritma ini terdiri dari dua tahap yaitu rectangular segmentation dan segmentasi dibawah sumber cahaya.
Algoritma Watershed yang digabungkan dengan homomorphic
filtering dan transformasi Top-Hat dapat diaplikasikan untuk proses
segmentasi dengan kondisi pencahayaan yang tidak merata pada sebuah citra yang ditangkap kamera (Wen-Cheng, Xiao-Jun, 2013).
Homomophic filtering dapat melemahkan komponen frekuensi rendah
dan menguatkan komponen frekuensi tinggi untuk membuat citra menjadi kontras. Transformasi Fourier digunakan pada homomorphic
frekuensi. Hasil citra yang sudah di filter selanjutnya akan melalui tahap transformasi Top-Hat. Keunggulan transformasi Top-Hat yang dapat mendeteksi puncak dan lembah dari grayvalue pada citra membuat transformasi Top-Hat dapat menghilangkan kondisi warna latar belakang yang tidak rata akibat pencahayaan, kemudian dapat menghasilkan warna latar belakang yang seragam.
Citra yang dihasilkan dari transformasi Top-Hat akan disegmentasi oleh algoritma watershed agar partikel yang diinginkan dapat dipisahkan dari latar belakang. Dengan mengoreksi pencahayaan yang tidak merata sampai melalui proses segmentasi yang sederhana metode ini memberikan hasil memuaskan yaitu partikel yang diinginkan dapat terpisah dari latar belakang. Metode yang diperkenalkan oleh Wen-Cheng memberikan hasil segmentasi lebih baik dibandingkan metode segmentasi yang lain, seperti metode Otsu, metode Iterative, metode Averate dan metode Maximum
Entropy.
Adapun segmentasi warna citra (Koh, Miles, Morgan, Hayes-Gill, 2007). Algoritma ini terdiri dari enam tahap. Tahap awal yaitu mengambil gambar dengan tiga macam kondisi pencahayaan yang berbeda, dilanjutkan tahap kedua yaitu memisahkan citra menjadi RGB (Red, Green, Blue) planes. Tahap ketiga mencari nilai maksimum intensitas gambar. Tahap keempat yaitu mencari rasio gambar yang dihitung dengan membagi setiap bidang gambar dari nilai maksimum intensitas gambar, dimana nilai rasio gambar akan dipakai untuk tahap kelima yaitu mencari edge maps.
Algoritma segmentasi yang dikembangkan oleh Koh memberikan hasil segmentasi lebih unggul dengan menghasilkan
boundary yang lebih bersih dan akurat dibandingkan dengan teknik
segmentasi watershed dan canny edge detection.
Variasi pencahayaan mempengaruhi perubahan warna citra yang ditangkap kamera. Segmentasi citra yang berwarna dengan menggunakan algoritma adaptive akan diuji pada citra yang diberi tiga macam sumber cahaya dengan kondisi pencahayaan yang beragam (Kuo-Yang TU, 2009). Komponen YUV, dimana Y
merupakan komponen dapat menentukan edge detection untuk warna citra. Sedangkan komponen U dan V mendeskripsikan hue dan
saturation dari warna citra. Komponen YUV dapat menentukan nilai threshold yang akan dipakai. Nilai rata-rata komponen YUV
digunakan untuk menganalisa warna citra akibat varias pencahayaan. Dua macam percobaan, yaitu percobaan menggunakan kondisi pencahayaan gelap dan kondisi pencahayaan terang dipakai untuk menguji algortima adaptive.
2.4.3 Edge Suppressing
Salah satu algoritma segmentasi yang dipakai pada penelitian ini yaitu algoritma Edge Suppression by Gradient Field
Transformation using Cross-Projection Tensors (Agrawal, Raskar,
Chellapa, 2006). Algortima ini melakukan segmentasi dengan kondisi pencahayaan beragam dan menggunakan teknik edge suppressing untuk pengolahan citra.
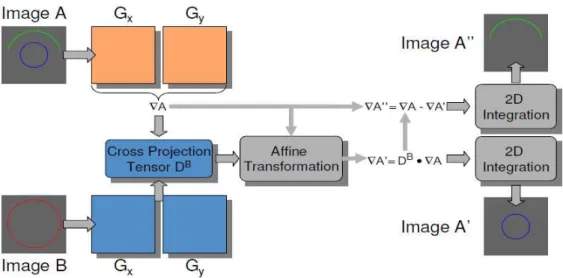
Gambar 2.9 Algoritma Edge Suppression by Gradient Field Transformation using Cross-Projection Tensors
Algoritma edge suppressing menggunakan pendekatan tensor untuk melakukan transformasi dalam mencari gradient citra untuk objek yang diinginkan. Algoritma ini mengandung dua macam citra
background dan foreground. Citra background terdiri dari
objek-objek yang menjadi background yang nantinya akan dipisahkan pada saat proses segmentasi seperti terlihat pada gambar 2.10.
Gambar 2.10 Background
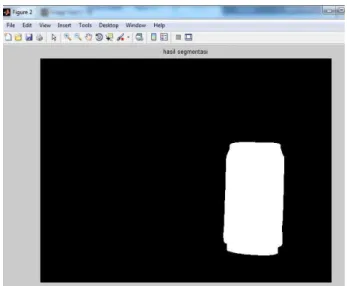
Citra foreground mengandung objek yang diingkan yaitu kaleng Sun-Maid agar terpisah dari background setelah melalui proses segmentasi seperti terlihat pada gambar 2.11. Dua macam tensor yang dibutuhkan pada algoritma ini yaitu structur tensor dan cross diffusion
tensor. Jenis filter yang digunakan pada algoritma ini yaitu Gaussian filter dengan menggunakan matriks kernel Gaussian. Dengan mencari
nilai structure tensor yang didapatkan dari kernel Gaussian dan
gradient citra foreground dan background, maka dapat ditentukan
nilai eigen value dan eigen vector. Nilai eigen value yang kemudian akan menentukan nilai cross projection tensor yang akan dipakai pada algoritma ini. Transformasi yang digunakan pada algoritma ini yaitu
affine transformation. Untuk melakukan affine transformation
dibutuhkan nilai cross diffusion tensor. Hasil dari transformasi akan memberikan nilai gradient citra yang baru dari objek yang diinginkan. Integrasi gradient citra tersebut akan menghasilkan suatu citra baru dari objek yang diinginkan seperti terlihat pada gambar 2.12
Gambar 2.12 Hasil edge suppressing
Teknik edge suppressing yaitu menghilangkan tepi pada citra dari informasi edge pada citra background, melalui transformasi antara gradient citra foreground dan cross projection tensor.
2.4.4 Tensor
Tensor merupakan orde tingkat tinggi dari matriks (orde
tingkat 2), vektor ( orde tingkat satu), dan skalar (orde tingkat 0). Dengan menggunakan tensor dapat memudahkan dalam memproses data-data dalam jumlah yang besar, dan dengan menggunakan tensor waktu proses pengerjaan yang dibutuhkan lebih sedikit.
Sejak abad ke-19 tensor sangat membantu dalam menyelesaikan masalah yang ada. Dalam fisika, menghitung dan menyatakan suatu nilai dibutuhkan sebuah besaran. Seperti contoh perhitungan berat badan (massa) dalam fisika dipakai besaran untuk menyatakannya yaitu m. Misal dalam mencari sebuah tegangan listrik (V) membutuhkan besaran-besaran yang lain untuk menghitung nilainya yaitu membutuhkan besaran arus (I), dan besaran hambatan (R) untuk mendapatkan nilai tegangannya. Bayangkan bila untuk mencari satu nilai saja membutuhkan banyak besaran. Dengan memakai tensor elemen-elemen yang ada dalam fisika (semua komponen) dibuat menjadi satu objek dalam matematika. Pada abad sekarang dalam pengerjaan dengan menggunakan komputer juga terdapat masalah yaitu data-data yang diproses sangatlah banyak sehingga dipakailah tensor dalam memudahkan proses pengerjaannya. Tujuan dari tensor adalah menyederhanakan persamaan-persamaan yang ada sehingga memudahkan dalam proses pengerjaannya (Ceberio,Kreinovich, 2008).
2.4.5 Affine Transformation
Affine Transformation banyak digunakan dalam bidang
computer vision khususnya dalam pengenalan sebuah benda atau objek. Secara khusus affine transformation dipakai dalam memetakan objek 2 dimensi ke gambar 2 dimensi dalam ruang 3 dimensi. Affine
transformation adalah sebuah transformasi yang membuat garis dan
memetakan gambar dengan 4 paramater yaitu : translation, rotation,
Contoh sebuah gambar objek memiliki beberapa titik ( p’1, p’2,
p’3, ... p’m ) yang saling terhubung. Gambar objek tersebut diletakkan
pada sebuah bidang dan dilihat dengan dua arah yang berbeda, dengan gambar objek yang sama. Dari penglihatan dengan arah berbeda di dapatlah dua persamaan yaitu :
p = (x, y) (13)
p’ = (x’, y’) (14)
Koordinat titik p dapat diperoleh dengan affine transformation, seperti berikut :
p = Ap’ + b (15)
Dimana A adalah matriks 2x2 dan b adalah vektor 2 dimensi. Dari pesamaan (1) di dapat :
x = a11x’ + a12y’ + b1 (16)
y = a21x’ + a22y’ + b2 (17)
Gambar 2.13 menyatakan gambar (a) objek asli, (b) – (d) gambar objek yang telah di affine transfomation
Dari dua persamaan (16) dan (17) memperlihatkan dua gambar yang berbeda, sehingga objek ada yang dapat dikenali dan ada yang tidak dapat dikenali, inilah disebut teknik affine transformation. Contoh teknik affine transformation dapat dilihat pada gambar 2.13 (Bebis, Georgiopoulos, Lobo, Shah, 1999).
27 BAB 3
METODE PERANCANGAN
3.1 Perancangan
Metode perancangan yang dilakukan yaitu merancang sistem segmentasi dengan algoritma dan menguji parameter yang menjadi pengaruh keberhasilan sistem. Parameter yang dapat mempengaruhi keberhasilan sistem segmentasi yaitu kondisi intensitas cahaya, bentuk warna dan tekstur objek yang terkandung pada citra. Variabel yang diukur pada penelitian ini yaitu jumlah pixel yang terdapat pada citra hasil segmentasi, distribusi penyebaran intensitas pixel objek pada citra, dan nilai intensitas pixel yang terkandung pada citra. Proses segmentasi dari citra yang ditangkap oleh kamera bergantung pada tiga hal yaitu :
1. Kondisi fisik yang terkandung pada scene atau area pengambilan gambar,
2. illumination incident atau banyaknya cahaya yang mengenai scene,
3. Karakteristik kamera
Dalam perancangan ini telah mengalami beberapa proses perbaikan dan pengembangan sistem segmentasi dalam metode dan jenis objek yang digunakan. Jenis objek yang digunakan pada perancangan saat ini lebih variatif dibandingkan dengan percobaan segmentasi sebelumnya yang hanya menggunakan objek lego dan kotak berwarna. Perancangan ini menggunakan objek dengan bentuk bervariasi yaitu cangkir, M-Key BCA dan pena. Metode segmentasi yang akan digunakan pada perancangan ini yaitu metode edge suppressing yang telah melalui proses penentuan
threshold level.
Percobaan segmentasi yang awalnya hanya menggunakan intensitas cahaya yang tinggi, telah dikembangkan pada percobaan ini dengan menggunakan nilai intensitas rendah.
3.1.1 Kondisi fisik citra
Kondisi fisik yang terkandung pada area pengambilan gambar yaitu objek-objek yang akan digunakan pada penelitian. Objek dapat terlihat oleh kamera karena banyaknya cahaya yang dapat dipantulkan dan diserap oleh objek dari besarnya intensitas cahaya yang mengenai objek tersebut. Pemantulan cahaya oleh objek bergantung dari jenis permukaan objek dan tekstur atau permukaan yang tidak rata, oleh karena itu jenis permukaan objek seperti warna objek dapat berpengaruh terhadap proses segmentasi. Sebagian besar benda memiliki perbedaan warna antara satu benda dengan benda lain, oleh karena itu percobaan segmentasi perlu dilakukan menggunakan objek yang warnanya berbeda antara satu dengan yang lainnya.
Untuk kedepannya penelitian ini akan digunakan pada robot RV-M1 sehingga ukuran objek yang digunakan pada penelitian perlu disesuaikan dengan kemampuan end effector untuk menjangkau objek tersebut. Disamping itu dalam kehidupan sehari-hari lebih banyak dijumpai benda yang memiliki bentuk tidak beraturan, oleh karena itu agar sistem segmentasi dapat dipakai untuk kondisi real atau sebenarnya maka percobaan segmentasi dikondisikan menggunakan objek dengan bentuk tidak beraturan.
Dengan mengkondisikan sistem segmentasi pada benda dalam kehidupan sehari yaitu objek yang memiliki warna berbeda dan bervariasi serta bentuk yang tidak beraturan dan dapat dijangkau oleh
end effector robot RV M1, maka percobaan ini dilakukan dengan
menggunakan tiga macam objek yang masing-masing memiliki bentuk dan warna yang berbeda, yaitu cangkir berwarna putih, pena berwarna hitam, dan M-Key BCA dengan warna bervariasi yaitu biru, putih, dan merah pada gambar 3.1
Gambar 3.2 Posisi peletakkan kamera
Perancangan penelitian ini untuk kedepannya akan digunakan untuk diaplikasikan pada robot RV-M1 sehingga kondisi perancangan penelitian perlu disesuaikan dengan kondisi robot RV-M1. Dengan memperhatikan jarak maksimal yang dapat dijangkau oleh lengan robot RV-M1 maka jarak antar kamera dengan dasar triplek tempat objek diletakkan yaitu 40 cm. Kamera diletakkan tegak lurus dengan area peletakkan objek agar hanya permukaan atas objek yang dapat terlihat, karena untuk kedepannya ketika sistem ini digunakan deteksi objek pada visual servoing menggunakan robot RV-M1 maka dibutuhkan informasi permukaan atas objek agar end effector robot dapat menjangkau objek secara vertikal seperti pada gambar 3.2.
3.1.2 Illumination incident
Illumination incident atau banyaknya cahaya yang mengenai
scene atau area pengambilan gambar dapat mempengaruhi keberhasilan sistem, oleh karena itu perlu dilakukan percobaan dengan menggunakan intensitas cahaya yang bervariasi untuk melihat pengaruh perubahan intensitas cahaya terhadap sistem segmentasi. Untuk mengukur nilai intensitas cahaya yang mengenai area pengambilan gambar digunakan lux meter pada percobaan ini seperti terlihat pada gambar 3.3.
Gambar 3.3 Lux meter
Untuk memudahkan percobaan dengan nilai intensitas yang berubah, maka digunakan lampu sorot yang pencahayaannya dapat diatur menggunakan potensiometer. Posisi peletakkan lampu juga perlu diatur sesuai dengan kebutuhan intensitas cahaya yang diperlukan pada percobaan. Percobaan disesuaikan dengan kondisi pencahayaan di dalam ruangan dengan besar intensitas cahaya berkisar dari 200 lux sampai 500 lux.
Untuk melihat pengaruh keberhasilan sistem terhadap intensitas cahaya yang tinggi, maka percobaan dilakukan dengan menggunakan intensitas cahaya sampai 1000 lux. Karena dibutuhkan
intensitas cahaya sampai dengan 1000 lux, maka sumber cahaya yaitu lampu diletakkan 27 cm dari area peletakkan objek. Keberhasilan sistem juga perlu diuji dengan intensitas cahaya yang rendah, sehingga perlu pengaturan letak kamera yang berbeda dari sebelumnya agar sumber cahaya dapat memberikan pencahayaan dengan nilai intensitas rendah yang berkisar dari 1 lux sampai 100 lux.
Percobaan dengan pencahayaan gelap dilakukan dengan intensitas cahaya dari 1 lux sampai 100 lux dengan rentang intensitas cahaya 50 lux pada setiap kondisi. Untuk mendatkan intensitas cahaya dari 1 sampai 100 lux, maka sumber cahaya diletakkan dengan jarak 40 cm dari area pengambilan gambar. Hal ini dikarenakan jika lampu diletakkan dengan jarak kurang dari 27 cm maka sulit untuk mendapatkan nilai intensitas 1-100 lux dengan pengaturan pencahayaan dari potensiometer.
Saat melakukan percobaan dengan intensitas rendah telah dilakukan usaha untuk melakukan percobaan dengan range 10 lux dengan mengatur tegangan stabil dari potensiometer untuk mendapatkan pencahayaan yang stabil. Tetapi dengan peralatan yang ada didapatkan hasil pencahayaan yang tidak konsisten dari lampu, sehingga mengakibatkan hasil yang tidak konsisten pada citra yang ditangkap kamera.
Gambar 3.4 memperlihatkan citra dengan nilai intensitas 50
lux terlihat lebih gelap gambar 3.4(b) dibandingkan citra dengan nilai
intensitas 20 lux gambar 3.4(a). Hal ini memperlihatkan tidak konsistennya lampu memberikan pencahayaan saat dilakukan percobaan dengan nilai intensitas yang rendah.
Percobaan dengan intensitas cahaya yang tinggi dilakukan dari 200 lux sampai 1000 lux dengan rentang intensitas 100 lux pada setiap kondisi. Agar potensiometer dapat memberikan intensitas 200 lux sampai 1000 lux pada lampu, maka jarak lampu 27 cm dari area pengambilan gambar.
(a) (b)
Gambar 3.4 (a) Intensitas 20 lux (b) Intensitas 50 lux
Percobaan dengan intensitas cahaya yang tinggi dilakukan dari 200 lux sampai 1000 lux dengan rentang intensitas 100 lux pada setiap kondisi. Agar potensiometer dapat memberikan intensitas 200 lux sampai 1000 lux pada lampu, maka jarak lampu 27 cm dari area pengambilan gambar. Pengelompokkan nilai intesitas cahaya dilakukan karena hasil pengukuran lux meter yang berbeda-beda akibat terlalu sensitif, walaupun kondisi pencahayaan yang sama menurut pengamatan oleh mata telanjang.
Karena berubahnya letak sumber cahaya pada percobaan, maka workbench percobaan dibuat menggunakan rel agar lampu yang menyatu dengan bench dapat diubah posisinya sesuai dengan jarak yang diperlukan pada gambar 3.5.
3.1.3 Karakteristik kamera
Pada penelitian ini karakteristik kamera diabaikan, karena penelitian ini hanya menggunakan satu jenis kamera yaitu web cam, sehingga tida ada perbandingan antara web cam dengan jenis kamera yang lain.
Perancangan didasarkan pada besarnya intensitas cahaya yang mengenai objek, yang berkaitan erat dengan tekstur dan warna objek, sehingga beberapa parameter pada sistem yang mempengaruhi keberhasilan melalukan segmentasi adalah intensitas cahaya lingkungan sekitar saat pengambilan gambar oleh kamera, tekstur objek dan warna objek yang akan digunakan sebagai background, serta warna objek sebagai foreground untuk penelitian.
3.2 Model Segmentasi
Perancangan model segmentasi terdiri dari objek-objek yang diberi pencahayaan yang akan dipantulkan dan diserap oleh objek. Banyaknya cahaya yang dipantulkan oleh objek-objek tersebut akan ditangkap kamera dan masuk ke komputer sebagai input citra. Kamera tersambung ke komputer untuk pemrosesan gambar.
3.2.1 Pengambilan Gambar
Pengambilan gambar oleh kamera dilakukan pada tahap image
acquisition dengan menggunakan fungsi pada matlab. Pengambilan
citra tidak dilakukan pada ruang terbuka, sebab pengaruh cahaya matahari yang tidak tetap karena bergantung cuaca, dapat mempersulit dalam melakukan pengambilan citra. Oleh karena itu pengambilan gambar dilakukan di dalam ruangan tertutup dengan sumber pencahayaan dari lampu.
Objek diletakkan pada kotak percobaan berupa triplek berwarna putih yang bertutup yang bertujuan untuk mengurangi noise akibat pemantulan benda-benda yang tidak termasuk objek cangkir,
M-Key BCA dan pena. Hal ini dikarenakan pemantulan cahaya dari
benda lain yang bukan objek cangkir, mkey bca dan pena akan menimbulkan noise dari incident illumination yang ditimbulkan dari benda tersebut sehingga objek percobaan yang ditangkap kamera akan menerima pencahayaan akibat noise dari pantulan benda-benda sekitar yang bukan merupakan objek untuk percobaan.
Citra yang ditangkap oleh kamera mengandung beberapa macam objek yang memiliki bentuk dan warna berbeda dan saling bertumpuk (overlapping). Percobaan dilakukan secara bertahap dengan menggunakan objek yang paling sederhana tekstur dan warnanya yang terdapat pada citra, yang kemudian dikembangkan sampai dengan menggunakan objek yang memiliki bentuk tidak beraturan serta warna dan teksur yang variatif.
3.2.2 Proses Segmentasi Region growing
Gambar 3.6 Diagram Blok Rancangan Sistem Region growing
Objek Kamera Komputer
Thresholding Region growing Image enhancement Object yang diinginkan Pencahayaan
Percobaan segmentasi terhadap pengaruh pencahayaan awalnya dilakukan menggunakan metode region growing sebagai algoritma untuk proses segmentasi. Dengan menggunakan objek yang paling sederhana bentuknya yaitu kaleng dan kubus, disamping itu warna kedua objek tersebut memiliki perbedaan warna yang kontras yaitu warna biru untuk kaleng dan objek sebagai latar belakang adalah warna kuning untuk kubus pada gambar 3.7. Percobaan segmentasi objek kaleng dan kubus tersebut dilakukan dengan intensitas cahaya 1
lux sampai 100 lux.
Gambar 3.7 Objek kaleng dan kubus
Objek kaleng dan kubus yang diberi pencahayaan, akan mengalami pemantulan yang akan ditangkap oleh kamera dan masuk ke computer sebagai citra input. Selanjutnya computer akan melakukan pemrosesan citra yang diawali dengan Image enhancement untuk memperbaiki kualitas citra seperti pada gambar 3.6. Image
enhancement yang terdiri dari dua tahap yaitu grayscaling dan filter,
akan mengubah gambar RGB menjadi gambar keabuan atau grayscale seperti pada gambar 3.8.
Gambar 3.8 Hasil grayscale
Median filter digunakan pada tahap image filter untuk menghilangkan noise salt pepper agar kualitas citra menjadi lebih baik. Dari histogram hasil filter maka dapat dilihat distribusi penyebaran intensitas pixel berpusat pada tiga daerah yang merepresentasikan objek kaleng, objek yaitu kubus dan latar belakang karton putih pada gambar 3.9.
Gambar 3.9 Histogram hasil filter
Metode region growing melakukan segmentasi dengan membandingkan nilai intensitas pixel n dengan pixel n tetangga. Metode region growing membutuhkan thresholding. Tanpa
thresholding maka sulit untuk menentukan nilai seed point yang akan
dipakai pada region growing, dikarenakan nilai intensitas pixel dapat berubah seiring dengan berubahnya nilai intensitas cahaya.
Gambar 3.10 Hasil segmentasi kaleng dari kubus
Dengan menggunakan region growing maka percobaan sederhana dengan dua objek yaitu kubus kuning dan kaleng biru memberikan hasil segmentasi yang baik seperti pada gambar 3.10 sehingga kaleng dapat dipisahkan dari background yaitu kubus kuning dan karton putih.
Selain itu dilakukan percobaan dengan dua buah objek yaitu kotak berwarna coklat muda, dan dompet berwarna coklat tua seperti pada gambar 3.11 dengan nilai intensitas cahaya yang lebih tinggi dari percobaan sebelumnya dengan kaleng biru. Intensitas cahaya yang digunakan pada percobaan dengan objek dompet ini yaitu dari 100 lux sampai 700 lux untuk menguji keberhasilan sistem segmentasi jika diberi pencahayaan dengan intensitas yang tinggi.
Gambar 3.11 Objek dompet cokelat dan kotak
Region growing berhasil melakukan segmentasi dengan baik
sehingga objek yang ingin disegmentasi yaitu dompet coklat tua dapat dipisahkan dari latar belakang seperti pada gambar 3.12.
Gambar 3.12 Hasil segmentasi objek dompet dan kotak
Percobaan segmentasi dikembangkan menjadi lebih kompleks dengan menggunakan beberapa objek sebagai background yang memiliki tekstur dan warna yang bervariasi untuk menguji keberhasilan segmentasi. Objek yang dipakai yaitu kotak persegi panjang berwarna coklat muda yang memiliki corak garis, empat buah lego yang memiliki warna berbeda yaitu kuning, coklat, abu muda dan hijau seperti pada gambar 3.13. Dengan menggunakan objek yang memiliki variasi warna maka dapat dianalisa pengaruh parameter warna terhadap keberhasilan sistem segmentasi.
Gambar 3.13 Objek lego
Region growing tidak dapat bekerja dengan baik untuk kondisi
citra yang mengandung objek dengan warna yang bervariasi pada gambar 3.14 sehingga dikembangkan metode segmentasi yang lain yaitu edge suppressing.
3.2.3 Proses Segmentasi dengan Edge suppressing
Karena metode region growing yang digunakan pada percobaan pada citra dengan objek dengan variasi warna memberikan hasil yang kurang baik, maka proses segmentasi dikembangkan menggunakan metode edge suppressing. Berbeda dengan region
growing, metode edge suppressing membutuhkan dua macam citra
sebagai input, yaitu background dan foreground. Bacgkround terdiri dari objek sebagai latar belakang sedangkan foreground yaitu citra yang terdiri dari objek-objek yang ada pada background serta objek yang akan disegmentasi. Metode edge suppressing menghilangkan tepi pada citra dari informasi edge pada citra background, sehingga citra yang mengandung background dapat disegmentasi agar hanya terlihat objek yang akan disegmentasi pada citra foreground saja. Sumber cahaya yaitu lampu akan memberikan pencahayaan yang selanjutnya akan dipantulkan oleh objek. Banyaknya cahaya yang dapat dipantulkan oleh objek akan ditangkap oleh kamera dan masuk ke komputer sebagai citra input kemudian diproses dengan metode segmentasi edge suppressing seperti terlihat pada gambar 3.15.
Gambar 3.15 Diagram Blok Rancangan Sistem Edge suppressing
Percobaan segmentasi dengan metode edge suppressing pada awalnya menggunakan lego yang memiliki variasi warna. Pada gambar 3.16(a) citra yang ditangkap kamera merupakan background
Objek Kamera Komputer Edge
suppressing Pencahayaaan
yang terdiri dari lego berwarna hijau, abu-abu terang dan coklat terang, serta kotak Samsung berwarna coklat muda. Warna lego yang beragam tersebut untuk menguji tingkat keberhasilan segmentasi jika diberikan background dengan parameter warna objek yang beragam.
Gambar 3.16(b) merupakan foreground terdiri dari objek-objek yang ada pada background sebelumnya dan objek-objek yang akan disegmentasi, dalam hal ini yaitu lego berwarna biru tua. Gambar 3.16(a) yaitu background dan gambar 3.16(b) yaitu foreground akan disegmentasi dengan metode edge suppressing sehingga menghasilkan citra output berupa objek lego berwarna biru tua yang terpisah dari background seperti pada gambar 3.17.
(a) (b)
Gambar 3.16 (a) Background (b) Foreground
Dengan menggunakan edge suppressing proses segmentasi berhasil dilakukan dengan kondisi objek dengan warna yang bervariasi, sehingga percobaan dikembangkan menggunakan objek real yang banyak dijumpai dalam kehidupan sehari-hari. Objek real memiliki tingkat kesulitan lebih tinggi untuk disegmentasi dibandingkan dengan lego, karena objek memiliki bentuk tidak beraturan. Background terdiri dari triplek putih dan objek buku dengan sampul bergambar yang memiliki warna beragam seperti pada gambar 3.18(b) yang akan disegmentasi dengan cangkir yang akan dipakai sebagai objek pada foreground seperti pada gambar 3.18(a).
(a) (b)
Gambar 3.18 (a) Foreground dengan objek meteran (b) Background
Melalui segmentasi dengan metode edge suppressing maka
background triplek putih dan buku bergambar dapat dihilangkan
sehingga hanya objek yang diinginkan saja, yaitu cangkir yang terlihat seperti pada gambar 3.19.
3.3 Pengembangan algoritma
3.3.1 Perbandingan metode region growing dan metode edge suppressing
Metode region growing yang penah digunakan pada perancangan awal memberikan citra output berupa gambar biner dari hasil proses segmentasi, berbeda dengan metode edge suppressing yang hasil output proses segmentasi berupa gambar RGB. Diawali dengan menentukan nilai intensitas seed point, maka algoritma region
growing akan bekerja dengan membandingkan nilai intentasitas pixel
tetangga dan nilai intensitas seed point. Diperlukan nilai threshold pada region growing untuk membatasi berkembangnya region dalam membentuk suatu bagian atau daerah. Citra dengan pixel-pixel yang memiliki nilai intensitas sesuai dengan nilai seed yang ditentukan akan menjadi akar untuk berkembangnya suatu region.Pix el dengan nilai intensitas seedpoint tersebut akan melihat nilai intensitas pixel disebelahnya atau pixel tetangga untuk dihitung selisih perbedaan nilai intensitasnya seperti pada gambar 3.20.
Gambar 3.20 Diagram alir region growing
Metode region growing yang bekerja dengan membandingkan intensitas pixel sulit diaplikasikan pada citra yang memiliki objek
background yang memiliki variasi tekstur dan warna seperti pada
gambar 3.21, karena citra dapat memberikan karakteristik pixel yang bervariasi pada citra. Karakteristik pixel yang bervariasi tersebut menyebabkan nilai seed point yang dibutuhkan untuk region growing menjadi tidak tetap, sehingga segmentasi menjadi kurang berhasil pada kondisi ini seperti pada gambar 3.22.
Gambar 3.21 Objek dengan warna variatif
Gambar 3.22 Hasil region growing dari gambar 3.21
Segmentasi dengan metode region growing memiliki kelebihan yaitu lebih cepat melakukan komputasi untuk segmentasi dibandingkan dengan metode edge suppressing. Waktu yang dibutuhkan untuk segmentasi dengan metode region growing adalah 0,8 detik.
Berbeda dengan metode region growing, segmentasi objek yang memiliki warna variatif memberikan hasil yang baik jika dilakukan segmentasi dengan metode edge suppressing seperti pada gambar 3.23
Gambar 3.23 Hasil edge suppressing m-key BCA
Segmentasi region growing tidak dapat memberikan hasil yang baik sebagaimana pada bab 4 dalam grafik dalam gambar 4.14 dan 4.15. Karena metode region growing memberikan hasil yang segmentasi kurang baik untuk citra dengan objek yang memiliki warna variasi, maka selanjutnya penelitian ini akan menggunakan metode edge suppressing saja untuk melakukan proses segmentasi.
3.3.2 Perbaikan metode edge suppressing
Setelah dilihat dari percobaan-percobaan sebelumnya dengan region
growing dan edge suppressing, maka pada akhirnya algoritma yang
digunakan adalah edge suppressing saja dengan perbaikan sehingga dapat memberikan hasil segmentasi lebih baik.
Proses edge suppressing menggunakan algoritma Edge Suppression
by Gradient Field Transformation using Cross-Projection Tensors yang
diperkenalkan oleh Agrawal, Raskar dan Chellapa, menggunakan pendekatan penurunan local tensor pada satu citra citra dan tranformasikan ke gradient field ke citra yang lainnya. Image A merupakan foreground, image B adalah
background, sedangkan image A’ adalah citra hasil segmentasi berupa objek
yang diingkan. Image A’’ adalah hasil bayangan objek. Dua macam citra yaitu background dan foreground diubah dari RGB (Red Green Blue) menjadi tipe YUV pada gambar 3.25.
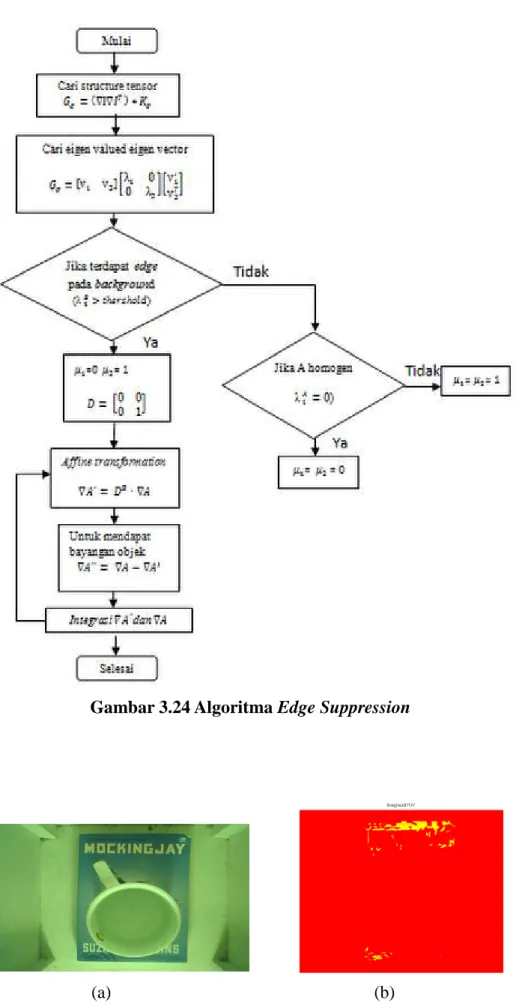
Gambar 3.24 Algoritma Edge Suppression
(a) (b)
Setelah citra diubah menjadi YUV selanjutnya akan dicari nilai
structur tensor, yaitu nilai .Komponen yang dibutuhkan untuk
mendapatkan nilai structur tensor adalah matriks kernel Gaussian yaitu dan gradient citra background dan citra foreground. Matriks kernel
Gaussian menggunakan nilai standard deviasi = 0.4 didapatkan dengan
persamaan (1) :
(1)
Sedangkan nilai gradient citra yang dibutuhkan yaitu gradient dalam sumbu x dan gradient dalam sumbu y seperti pada persamaan 2:
(2)
(3)
Dalam mencari nilai structur tensor yaitu persamaan (4), kernel Gaussian akan dikonvolusi dengan perkalian antara gradient citra dan gradient citra yang ditranspose seperti pada persamaan (3):
(4)
Structur tensor akan menghasilkan tiga macam gambar yang mewakili nilai matriks 2x2 dari tensor yang digambarkan pada gambar 3.26.
(c)
Gambar 3.26 (a) Hasil tensor T11 (b) Hasil tensor T12 (c) Hasil tensor T22.
Structur tensor akan menghasilkan nilai eigen value dan eigen vector seperti pada persamaan (5) :
(5)
(6)
Kemudian dicari nilai cross projection tensor DB untuk digunakan dalam mencari menggunakan affine transformation.
Terdapat beberapa ketentuan untuk menentukan cross
projection tensor DB:
• Jika B adalah homogeneous ( ) maka:
o Jika A tidak homogen maka = = 1,sehingga hasil
tensor
o Jika A adalah homogeneous ( ) maka nilai = =
0, sehingga hasil tensor
untuk pixel tersebut.
• Jika terdapat edge pada image B maka untuk menghilangkan edge, diberikan nilai =0 = 1
Nilai DB didapatkan seperti pada gambar 3.26 yaitu D11, D12, dan D22, dan dapat dilihat bahwa D12 menunjukkan edge
background yang nantinya akan dihilangkan.
Setelah didapat nilai DB seperti pada gambar 3.26, kemudian dengan menggunakan affine transformation dicari yaitu gradient
image A’ untuk mencari gradient objek yang diinginkan tanpa edge
objek background yaitu dengan persamaan (7):
(7)
Hasil gradient yang baru yaitu akan diintegral untuk mendapatkan citra objek yang diinginkan dan citra objek background telah hilang. Hasil image A’ yaitu hasil segmentasi edge suppressing.
(a) (b)
(c)
Gambar 3.26 Hasil cross diffusion tensor (a) D11 (b) D12 (c) D22
Hasil dari gambar A’’ yang hanya menghasilkan gambar objek yang disegmentasi akan diubah kembali dari format YUV menjadi RGB seperti pada gambar 3.28.
Gambar 3.28 Hasil gambar YUV ke RGB
Suatu citra yang berukuran 480 x 640 yaitu memiliki 480 baris dan 640 kolom yang diproses dengan algoritma edge suppressing, pada tahap awal akan dihasilkan suatu nilai Gaussian kernel berupa matriks 3x3 seperti pada gambar 3.29 untuk diproses berikutnya pada tahap .
Gambar 3.29 Hasil perhitungan
Nilai structur tensor terdiri dari tiga macam yaitu D11, D12, dan D22 masing-masing berukuran sesuai ukuran citra yaitu 480 x 640. Selanjutnya structure tensor akan menghasilkan suatu nilai eigen value dan
eigen vector yang akan dibandingkan dengan nilai threshold. Nilai eigen value dan eigen vector memiliki nilai dengan jumlah dimensi matriks yang
sama besarnya dengan nilai structure tensor yaitu 480 x 640. Dengan membandingkan nilai eigen value terhadap nilai threshold, maka dengan ketentuan yang ditetapkan pada algoritma ini akan didapatkan cross diffusion