Nomor Dokumen: KU1201-01-2014.10.07 Nomor Revisi: 01 Tanggal: 5/24/2015 Halaman 1 dari 17
PENGANTAR REKAYASA DAN DESAIN
CLUSTER 1 – FMIPA STEI
PROGRAM TPB - ITB
Judul Dokumen
DESAIN ROBOT LEGO MINDSTORM:
APPLICATIVE ROBOT
Jenis Dokumen
LAPORAN DESAIN KOMPETISI
Nomor Dokumen
KU1201- Clust01-2014.10.07
Nomor Revisi
Versi 01
Nama File
KU1201- Clust01-2014.10.07.docx
Tanggal Penerbitan
25 Mei 2015
Unit Penerbit
PRD Cluster 1 - FMIPA STEI ITB
Jumlah Halaman
17
(termasuk lembar sampul ini)Kelas: <xx> Kelompok: <xx>
CLUSTER 1 – FMIPA STEI
Ditulis
Nama/NIM: Umar Nawawi 16514075oleh
Nama/NIM: Nama/NIM: Bobby Yudha W. Tsaqif Alfatan N. 16514145 16514180Nama/NIM: Hafizh Afkar M. 16514215
Nama/NIM: Nama/NIM:
Muhammad Reifiza Nindy Aditya Dewi
16514255 16514275 Tanda Tangan Ketua Tanggal 24 Mei 2015
DAFTAR ISI
COVER ... 1 DAFTAR ISI ... 2 LIST OF INDIVIDUALCONTRIBUTION ... 3 1 PENGANTAR ... 4 1.1 RINGKASAN ISI DOKUMEN ... 41.2 TUJUAN PENULISAN DAN APLIKASI/KEGUNAAN DOKUMEN ... 4
1.3 REFERENSI ... 4
1.4 DAFTAR SINGKATAN ... 4
2 IDENTIFIKASI MASALAH (DEFINING THE PROBLEM) ... 5
2.1 DEFINISI MASALAH (PROBLEM DEFINITION)... 5
2.2 SPESIFIKASI (LIST OF SPECIFICATIONS) ... 6
3 ALTERNATIF KONSEP (GENERATION OF ALTERNATIVE CONCEPTS) .... 6
3.1 BRAINSTORMING ... 6
3.2 CONCEPT SKETCHING... 6
3.3 FUNCTIONAL DECOMPOSITION ... 7
4 EVALUASI ALTERNATIF DAN PEMILIHAN KONSEP (EVALUATION OF ALTERNATIVES AND SELECTION OF CONCEPT) ... 7
4.1 EVALUATING ALTERNATIVES ... 7
4.2 THE DECISION MATRIX ... 8
5 DESAIN RINCI (DETAILED DESIGN) ... 9
5.1 ANALYSIS ... 9
5.2 EXPERIMENTS ... 10
5.3 MODELS ... 10
5.4 DETAILED DRAWING ... 11
6 IMPLEMENTASI DAN PENGUJIAN (IMPLEMENTATION AND TESTING)14 6.1 IMPLEMENTASI (IMPLEMENTATION) ... 14
6.2 KRITERIA DAN METODA PENGUJIAN (TESTING CRITERIA AND METHODS) ... 15
6.3 HASIL PENGUJIAN (TESTING RESULTS) ... 16
7 ANALISIS (ANALYSIS) ... 16
8 KESIMPULAN ... 16
Nomor Dokumen: KU1201-01-2014.10.07 Nomor Revisi: 01 Tanggal: 5/24/2015 Halaman 3 dari 17
LIST OF INDIVIDUAL CONTRIBUTIONS
NAMA KONTRIBUSIDALAMKELOMPOK
Umar Narawi Pembuat desain robot
Bobby Yudha Penganilisis desain robot
Tsaqif Alfatan Nugraha Pembuat desain robot
Hafizh Afkar Makmur Programmer robot
Muhammad Reifiza Pembuat desain robot
SMART AUTOMATIC TRAFFIC LIGHT
1 Pengantar
1.1 RINGKASAN ISI DOKUMEN
Dokumen ini membahas konsep dan gagasan dari kegiatan desain robot yang berjudul
Smart Automatic Traffic Light (SATL). Uraian dalam dokumen ini mencakup identifikasi
masalah, deskripsi kebutuhan desain dan penentuan spesifikasi, pemaparan desain konseptual yang mencakup penentuan konsep-konsep alternatif, evaluasi alternatif dan pemilihan konsep. Kemudian dilanjutkan dengan pemaparan desain rinci dan implementasi, pengujian, analisis dan pengambilan kesimpulan.
Hasil desain diimplementasikan menggunakan platform Lego Mindstorms EV3, dan dikompetisikan pada akhir perkuliahan KU1201 Pengantar Rekayasa dan Desain 2.
1.2 Tujuan Penulisan dan Aplikasi/Kegunaan Dokumen
Dokumen ini ditulis sebagai pemenuhan syarat kelulusan mata kuliah KU1201 Pengantar Rekayasa dan Desain 2.
1.3 REFERENSI
1. Kosky, Philip. Et.al. Exploring Engineering, An Introduction to Engineering and
Design, Elsevier Inc., 2010.
1.4 DAFTAR SINGKATAN
SINGKATAN ARTI
PRD Pengantar Rekayasa dan Desain
LME Lego Mindstorms Education
Nomor Dokumen: KU1201-01-2014.10.07 Nomor Revisi: 01 Tanggal: 5/24/2015 Halaman 5 dari 17
2 IDENTIFIKASI MASALAH (DEFINING THE PROBLEM)
Pada bagian ini dijabarkan latar belakang, tujuan dan rumusan masalah mengenai kemacetan di kota Bandung yang menjadi dasar dibangunnnya robot untuk aplikasi Smart
Automatic Traffic Lamp dengan kemampuan mendeteksi sisi jalan yang paling padat untuk
menentukan lama waktu delay dari suatu sisi jalan. Permasalahan yang ada di kota Bandung diterjemahkan dalam besaran teknik. Hasilnya berupa definisi masalah (problem definition) dan daftar spesifikasi (list of specifications).
2.1 DEFINISI MASALAH (PROBLEM DEFINITION)
Dewasa ini, kemacetan lalu-lintas telah banyak dijumpai di kota-kota besar seperti kota Bandung, khususnya pada jam-jam sibuk. Salah satu indikator dari kemacetan lalu-lintas adalah kecepatan perjalanan atau waktu perjalanan pada ruas-ruas jaringan jalan kota. Jumlah pengguna jalan dan kendaraan makin hari makin meningkat, sedangkan fasilitas jalan terbatas (jumlah jalan, lebar jalan, kapasitas jalan, dsb). Oleh karena itu diperlukan peningkatan pengaturan sistem lalu lintas yang baik supaya kondisi lalu lintas tetap terjaga lancar dan jumlah kemacetan dapat ditekan seminimal mungkin.
Salah satu sarana dalam pengaturan lalu lintas adalah lampu lalu lintas yang berguna untuk mengatur aliran dan arah kendaraan-kendaraan yang sedang melintas di persimpangan jalan. Pemberlakuan tiga warna (merah, kuning, hijau) pada lampu lalu lintas juga telah menjadi standar umum internasional dan berlaku secara global. Namun, pengoperasian lampu lalu lintas bukanlah tanpa masalah. Siklus waktu lampu lalu lintas (merah – kuning - hijau) saat ini umumnya masih diatur secara konstan dan manual, sehingga tidak menyesuaikan lamanya delay dengan kepadatan kendaraan yang berubah-ubah sepanjang hari. Saat arus lalu lintas pada suatu lajur jalan sedang sepi (kepadatan rendah) lamanya delay waktu siklus tidak berbeda dengan lama delay disaat keadaan arus lalu lintas pada lajur jalan tersebut sedang ramai (kepadatan tinggi).
Secara ideal, lajur jalan dengan kepadatan arus kendaraan yang tinggi seharusnya memiliki delay waktu jalan (lampu hijau) yang lebih lama dibandingkan dengan lajur dengan kepadatan kendaraannya rendah. Tentu saja hal ini sangat berguna untuk memberikan kesempatan lebih banyak kepada kendaraan-kendaraan yang melewati lampu lalu lintas pada lajur yang lebih sibuk (kepadatan kendaraan lebih tinggi) tersebut.
Need: Dengan makin meningkatnya jumlah kendaraan di jalan maka dibutuhkan adanya
suatu sistem pengaturan siklus waktu lampu lintas yang pandai, yang dapat mengatur waktu siklus secara otomatis.
Problem Definition: Mendesain Smart Traffic Lamp Pada sistem Smart Traffic Lamp,
siklus waktu lampu lalu lintas bisa disesuaikan secara otomatis dengan densitas (kepadatan) kendaraan yang ada pada lajur-lajur jalan yang ada di sekitar persimpangan jalan, baik yang akan masuk ke persimpangan dan yang keluar dari persimpangan jalan. Dengan demikian waktu siklus (delay) lampu lalu lintas antara merah – kuning – hijau diharapkan benar-benar efektif dan efisien.
2.2 SPESIFIKASI (LIST OF SPECIFICATIONS)
a. Lama waktu delay menyesuaikan banyaknya kendaraan yang ada di suatu sisi jalan yang direpresentasikan dengan panjang antrian kendaraan.
b. Empat jalur kendaraan
c. Satu jalur terdiri atas dua jalur (kiri dan kanan) dengan arah yang berlawanan. d. Dalam satu jalur terdapat satu buah lampu lalu lintas.
e. Pada suatu waktu hanya ada satu jalur yang lampunya menyala warna hijau, dengan demikian lampu lalu lintas lainnya akan menyala merah.
f. Lebar satu lajur jalan pada arah tertentu sama dengan lebar kendaraan yang melewati jalan tersebut, dengan asumsi ukuran setiap kendaraan pada model ini adalah sama.
3 ALTERNATIF KONSEP (GENERATION OF ALTERNATIVE
CONCEPTS)
Pada kasus ini kita akan membahas penyelesaian dari permasalah yang sudah disebutkan di atas, yaitu permasalahan kemacetan di Kota Bandung
3.1 BRAINSTORMING
Untuk mengatasi masalah kemacetan, kami mendapatkan dua alternatif pemecahan masalah, antara lain
1. Alternatif 1 : Menghitung banyaknya kendaraan.
Pada alternatif pertama, kami memiliki gagasan untuk menghitung banyaknya jumlah kendaraan yang ada pada suatu ruas jalan. Sensor akan ditempatkan di perempatan jalan dan mendeteksi keempat ruas jalur yang ada.
2. Alternatif 2 : Menghitung baris kendaraan
Pada alternatif kedua, robot akan menggunakan sensornya untuk mendeteksi jumlah baris kendaraan yang ada dan kemudian robot akan menghitung detik lampu hijau yang diperlukan sehingga perempatan jalan bisa teratur dengan lebih baik lagi.
Nomor Dokumen: KU1201-01-2014.10.07 Nomor Revisi: 01 Tanggal: 5/24/2015 Halaman 7 dari 17
3.3 FUNCTIONAL DECOMPOSITION
3.3.1 Alternatif 1
1. Detect and Counting, proses robot menggunakan sensor ultrasonik untuk mendeteksi keberadaan kendaraan dan kemudian menghitung jumlah kendaraan.
2. Calculating, proses kalkulasi waktu lampu merah pada robot 3. Displaying, proses penampilan hasil kalkulasi pada lampu merah.
4. Refreshing and Recalculating, setelah lampu kembali merah, robot akan melakukan kalkulasi ulang dan memutuskan kembali.
3.3.2 Alternatif 2
1. Detect and Counting, proses robot menggunakan sensor ultrasonik untuk mendeteksi keberadaan mobil dan kemudian menghitung jumlah baris kendaraan.
2. Calculating, proses kalkulasi waktu lampu merah pada robot 3. Displaying, proses penampilan hasil kalkulasi pada lampu merah.
4. Refreshing and Recalculating, setelah lampu kembali merah, robot akan melakukan kalkulasi ulang dan memutuskan kembali.
4 EVALUASI ALTERNATIF DAN PEMILIHAN KONSEP
(EVALUATION OF ALTERNATIVES AND SELECTION OF
CONCEPT)
Setelah melalui proses diskusi yang cukup panjang, kelompok kami telah menemukan dua buah konsep yang akan dibuat sebagai solusi dalam pembuatan applicative robot. Konsep pertama yang ingin kami buat adalah robot sampah dan konsep yang lainnya adalah robot pengatur lalu lintas. Kedua konsep ini menurut kami memiliki kekurangan dan juga kelebihannya masing, namun hanya boleh satu alternative concept yang dipilih. Oleh karena itu pada subbab ini kami akan mengeliminasi salah satu konsep dengan menggunakan prinsip decision matrix yang dibuat berdasarkan evaluation criteria dan juga list of specification yang telah dibuat.
4.1 EVALUATING ALTERNATIVES
Robot yang ingin dibuat pada bagian ini berkonsep applicative robot dimana robot dibuat sekreatif mungkin dan juga memiliki aplikasi yang sangatlah luas pada kehidupan di masyarakat perkotaan. Oleh karena itu aspek yang harus dipertimbangkan dalam proses pembuatan robot kali ini adalah kegunaan robot dalam bidang kehidupan masyarakat perkotaan.
Selain kegunaan robot yang aplikatif, robot juga harus memiliki fungsi yang dapat memecahkan masalah yang belum dapat diatasi dengan sempurna. Misalnya kita ingin membuat robot yang dapat memutar sebuah lagu, robot ini sebenarnya memiliki fungsi untuk menyelesaikan masalah yang sebenarnya solusinya sudah dapat dipenuhi. Padahal kita bisa menggunakan sebuah handphone atau pemutar lagu lainnya untuk memecahkan masalah tersebut.
Selain itu aspek yang perlu dipertimbangkan lainnya adalah kemudahan dalam proses pembuatan robot. Semakin mudah robot itu untuk dibuat maka akan semakin cepat juga kita mengaplikasikan robot tersebut. Selain itu karena proses pembuatan robotnya mudah, hal
tersebut tidak akan merepotkan para desainer robot tersebut.
Robot yang kami inginkan adalah robot yang bisa digunakan pada situasi kondisi apapun. Hal yang kami maksud ialah bagaimana robot tersebut dapat beradaptasi pada kondisi lingkungan disekitarnya. Jika robot dapat menyesuaiakan dengan kondisi lingkungan maka robot tidak akan menemukan kendala dalam menjalankan fungsinya.
Kemudian aspek yang dipertimbangkan lainnya adalah biaya produksi robot yang seminim mungkin. Pada konsep kali ini kami sebenernya mempertimbkan jika pembuatan robot kalau bisa tidak perlu menambah biaya produksi lagi atau dengan kata lain kami hanya memanfaatkan peralatan-peralatan yang tersedia dalam proses perakitan robot ini.
4.2 THE DECISION MATRIX
EVALUATION CRITERIA
Setelah meninjau dari pembahasan diatas yang kami buat maka kami telah membuat beberapa evaluation criteria terhadap robot yang akan kami buat. Berikut ini evaluation
criteria yang kami inginkan terhadap robot yang akan kami buat :
• Robot mempunyai fungsi yang aplikatif
• Robot mempunyai fungsi yang dapat menyelesaikan masalah yang belum mempunyai solusi yang sempurna
• Robot mudah dibuat dan mudah diaplikasikan
• Robot dapat beradaptasi terhadap kondisi lingkungan sekitarnya
DECISION MATRIX
Evaluation Criteria Aspek Penilaian Alternatif 1
Aspek Penilaian Alternatif 2
Memiliki fungsi yang aplikatif
Robot ini cukup aplikatif diterapkan di Kota Bandung
Robot ini cukup aplikatif diterapkan di Kota Bandung
Antimainstream Robot ini masih tergolong
jarang karene pengembang cenderung fokus membuat robot transportasi bukan sistemnya
Robot ini masih tergolong jarang karene pengembang cenderung fokus membuat robot transportasi bukan sistemnya
Easy to build and easy to run
Robot ini cukup sulit untuk dibuat karena harus bisa mendeteksi jenis kendaraan dan batasan masing-masing kendaraan.
Robot ini cukup mudah
dibuat karena hanya
menghitung jumlah barisan antrian.
Adaptable Robot ini kurang mudah
diaplikasikan karena jenis kendaraan yang ada cukup bervariasi dan dibutuhkan
Robot ini mudah untuk
diadaptasikan dengan
lingkungan perkotaan yang memiliki mobilitas tinggi
Nomor Dokumen: KU1201-01-2014.10.07 Nomor Revisi: 01 Tanggal: 5/24/2015 Halaman 9 dari 17
waktu yang cukup lama untuk dapat menghitung jumlah kendaraan.
dengan kendaraan pribadi maupun umum.
Low cost Robot ini membutuhkan
biaya cukup tinggi karena sensor yang digunakan harus mampu membedakan jenis kendaraan
Robot ini dapat di tekan biaya
produksinya dengan
membuat sensor kecil
disetiap lampu merah atau di
bagian atas tengah
perempatan jalan
5 DESAIN RINCI (DETAILED DESIGN)
Pada tema applicative robot kelompok kami memutuskan untuk membuat robot pengatur lalu lintas. Robot ini rencananya akan dipasang di tengah jalan raya kemudian akan mengukur kecepatan dari suatu mobil. Robot ini akan tetap pada posisi yang telah diatur. Kemudian untuk menjalankan fungsinya robot tersebut akan ditambahkan beberapa sensor dan bentuk pendukung. Kemudian berikut ini merupakan rincian desain robot kami.
5.1 ANALYSIS
Beberapa model matematika digunakan dalam pendeteksian jumlah mobil. Bagian paling utama berhubungan dengan trigonometri dan aljabar. Kita dapat mengasumsikan jumlah mobil maksimal dalam satu baris yang dapat berjejer dalam sebuah jalan. Dengan asumsi itu, kita dapat mengatur “mata” robot untuk mendeteksi keberadaan mobil dalam suatu posisi
Untuk perihal bagaimana keberadaan mobil dalam suatu posisi dapat diprediksi, dapat digunakan model matematika berikut. Misalkan tinggi dari sensor ultrasonik dalam robot adalah h dan kita ingin mengecek sebuah posisi di jalan yang membuat sensor ultrasonik membuat sudut theta relatif terhadap garis normal jalan terhadap sensor. Kita bisa membuat rumus seperti ini.
= ℎ
sin
dimana d adalah jarak yang akan dideteksi oleh sensor ultrasonik jika sensor tidak mendeteksi keberadaan mobil (yang terdeteksi adalah jalan). Misalkan d’ adalah jarak sebenarnya yang dideteksi oleh sensor ultrasonik. Analisis yang dilakukan hanyalah tinggal membandingkan d’ dan d. Jika d’ lebih kecil dari d, maka kita bisa simpulkan bahwa ada mobil di titik tersebut. Sedangkan bila d’ kurang lebih sama dengan d, kita bisa simpulkan bahwa tidak ada mobil di posisi tersebut.
Sedangkan untuk rumus untuk lama lampu hijau yang dihitung. Bisa diperoleh dari rumus berikut ini.
= 15 − 5; ≤ 6
dengan t adalah waktu dan r adalah jumlah baris mobil dalam satu ruas perempatan. Jika r lebih dari 6, maka waktu lampu merah akan konstan sepanjang 10 detik.
5.2 EXPERIMENTS
Eksperimen dilakukan dengan memodelkan sensor yang digantung di atas pusat sebuah perempatan dengan pilar-pilar penyangga di setiap sudut. Asumsikan sensor dapat bergerak secara rotasi dalam sumbu x dan y serta dalam sumbu z secara tegak lurus. Langkah eksperimen dapat dijalanakan seperti berikut ini :
1. Letakkan model berbentuk kotak sebagai mobil di setiap ruas perempatan. 2. Nyalakan sensor dan arahkan ke salah satu ruas perempatan.
3. Biarkan sensor menganalisis jumlah mobil di perempatan. 4. Perhatikan jumlah mobil yang ditunjukkan oleh display monitor.
5. Perhatikan sensor yang akan berotasi 900 ke ruas perempatan berikutnya. 6. Perhatikan langkah 3-5 diulang 2 kali lagi
7. Setelah itu akan di display lama lampu merah yang dibutuhkan serta ruas pertama yang akan mendapat lampu hijau
8. Saat ruas pertama mendapat lampu hijau, robot akan kembali menganalisis ruas di
sebelah kiri ruas yang sedang mendapat lampu hijau karena asumsi bahwa di ruas
itu terjadi perubahan mobil paling sedikit saat itu.
9. Langkan 8 akan diulang 3 kali lagi untuk melengkapi satu buah loop 10. Robot akan kembali memberikan waktu lampu merah yang dibutuhakn 11. Sensor akan kembali mengulangi langkah 7-10.
Hal-hal yang perlu dicatat saat eksperimen dilakukan adalah perubahan rotasi robot, jumlah “mobil” yang terdeteksi, serta waktu lampu merah yang diberikan oleh display robot tersebut. Kita dapat mengatakan tahap 1-6 sebagai tahap inisiasi dan tahap 7-11 sebagai tahap stabilisasi. Perlu diperhatikan pada eksperimen transisi tahap dari inisiasi ke stabilisasi serta kestabilan tahap stabilisasi secara terus-menerus.
5.3 MODELS
Robot yang kelompok kami buat pada tema applicative robotat merupakan robot pengatur lalu lintas. Robot kami tersusun atas dua pasang tiang penyangga yang dibagian bawahnya terdapat badan penyangga. Kemudian kedua tiang tersebut akan dihubungkan dengan sebuah penyangga lagi. Penyangga ini rencananya akan dipakai sebagai tempat sensor ultrasonic berada. Sebelumnya sensor ultrasonik ini akan dihubungkan pada dua buah roda pemutar. Roda pemutar ini akan membuat sensor ini bergerak ke atas bawah dan kiri kanan sehingga dapat mengamati mobil yang melewati dari sistem robot yang kami buat. Kemudian kami juga menggunakan small motor sebagai sumber penggerak dari sensor ultrasonik tersebut. Kemudian badan brick sebagai badan utama robot akan diletakkan dipinggir tiang penyangga.
Nomor Dokumen: KU1201-01-2014.10.07 Nomor Revisi: 01 Tanggal: 5/24/2015 Halaman 11 dari 17
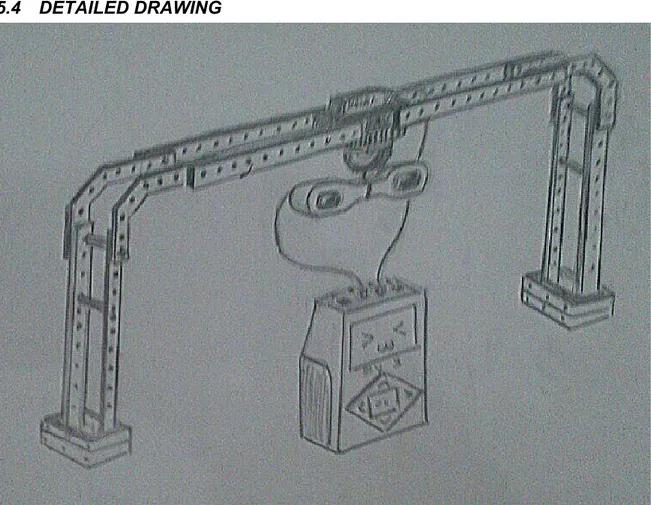
5.4 DETAILED DRAWING
Gambar diatas merupakan sketsa kasar dari robot yang akan kami buat. Berikut ini detail desain dari bagian-bagian robot :
Tiang Penyangga
Tiang penyangga yang kami gunakan ada 4 buah. Tiang tersebut memiliki 15 buah lubang dengan tiap dua tiang akan dihubungkan menggunakan mur kecil pada penyangganya. Panjang tiang ini sekitar 10 cm dengan lebar 1 cm.
Kotak Penyangga Tiang
kotak penyangga tiang ini sebenarnya tersusun atas dua buah kotak kecil yang dihubungkan pada tiang penyangga. Badan ini berfungsi sebagai penahan tiang agar tidak bergerak jatuh kebawah. Kotak ini berukuran sekitar 4x4 cm.
Tiang Penghubung
Tiang penghubung sebenarnya merupakan komponen yang pada dasarnya sama dengan tiang penyangga, namun diletakkan secara horizontal. Guna komponen ini adalah tempat sensor dan motor akan disangga. Selain itu tiang ini juga sebagai penyangga kedua buah tiang penyangga.
Roda Penggerak
Roda ini akan digantung pada bagian tengah tiang penghubung dan kemudian akan disambungkan pada sensor ultrasonik.
Small Motor
Motor ini rencananya akan diletakkan diatas bagian tengah tiang penhubung. Kemudian akan disambungkan dengan roda agar roda dapat bergerak.
Sensor Ultrasonik
kiri dan kekanan. Brick
6 IMPLEMENTASI DAN PENGUJIAN (IMPLEMENTATION AND
TESTING)
Sebuah robot untuk dapat berjalan sesuai dengan fungsinya haruslah mengalami beberapa perubahan atau modifikasi. Kemudian setelah beberapa modifikasi yang telah dilakukan dilakukanlah pengujian (testing) pada robot apakah fungsi robot tersebut sudah berjalan sesuai atau tidak. Kemudian pada bagian ini kami tampilkan implementasi dan pengujian robot.
6.1 IMPLEMENTASI (IMPLEMENTATION)
Implementasi dilakukan dengan melakukan pengujian sesuai konsep awal yang telah dibuat. Implementasi yang telah kami lakukan dapat dilihat pada gambar di bawah ini.
Nomor Dokumen: KU1201-01-2014.10.07 Nomor Revisi: 01 Tanggal: 5/24/2015 Halaman 15 dari 17
6.2 KRITERIA DAN METODA PENGUJIAN (TESTING CRITERIA AND METHODS)
No Kriteria pengujian Metode pengujian
1 Small motor dapat menggerakan
ultrasonic sesuai dengan sudut yang telah ditentukan program
Melihat pergerakan sensor ultrasonik apakah sensor telah bergerak dengan semestinya.
2 Robot dapat menghitung banyak
jalur pada satu ruas jalan dengan benar
Melihat jumlah jalur yang dihitung oleh ultrasonik.
3 Large motor dapat berputar sehingga sensor ultrasonic dapat berpindah dari satu ruas jalan ke ruas jalan yang lain
Melihat apakah sensor ultrasonik akan berpindah ke ruas yang lain ketika selesai mendeteksi sebuah ruas
4 Tiang penyangga dapat berdiri kokoh
ketika bagian pemutar sedang
berputar
Melihat apakah kondisi tiang bergetar ketika robot sedang dijalankan
5 Kabel tidak menghalangi gerakan sensor ultrasonik
Melihat gerakkan sensor apakah terhambat atau tidak
6.3 HASIL PENGUJIAN (TESTING RESULTS)
Setelah melakukan pengujian pada desain akhir robot kami maka diperoleh hasil sebagai berikut.
1. Small motor dapat menggerakan ultrasonic sesuai dengan sudut yang telah ditentukan program
2. Masih ditemukan kendala ketika menghitung banyak jalur pada satu ruas jalan. Terkadang berhasil dan terkadang tidak.
3. Large motor dapat menggerakan sensor ultrasonik dari satu ruas ke ruas lainnya. Namun hal ini hanya berlaku untuk dua ruas.
4. Tiang penyangga dapat berdiri kokoh ketika robot dijalankan.
5. Ketika hanya menghitung banyak jalur mobil pada dua ruas, kabel tidak
menghambat gerak sensor, namun ketika robot digunakan untuk menghitung jalur mobil pada 4 ruas jalan kabel akan menghambat pergerakan sensor.
7 ANALISIS (ANALYSIS)
Dari pengujian yang telah dilakukan, dapat dilihat bahwa program berjalan sesuai dengan rencana walaupun terkadang hasil pemindaian jumlah baris pada suatu ruas jalan tidak tepat. Hal ini disebabkan karena keterbatasan sensor dan faktor external lainnya seperti jalan yang tidak rata, inisialisai awal yang kurang tepat, dan lain-lain. Namun secara keseluruan program dan robot yag telah kami buat dapat berfungsi dengan cukup baik.
Jika konsep ini dapat diterapkan secara lebih besar, maka konsep ini dapat benar-benar dimanfaatkan untuk mengatasi permasalahan kemacetan yang selalu terjadi di kota-kota besar, khususnya Kota Bandung. Jika masalah kemacetan dapat dikurangi, maka tingkat produktivitas masyarakatpun akan bertambah. Selain itu konsep Smart Automatic Traffic
Light ini juga sekaligus mendukung tercapainya Bandung sebgaia smart city.
8 KESIMPULAN
Berdasarkan design yang telah kami buat, kami dapat menyimpulkan bahwa Smart
Traffic Lamp dapat kami buat sesuai dengan fungsi dan spesifikasi yang telah kami rancang.
Robot yang kami design diharapkan dapat mendeteksi kepadatan kendaraan pada masing-masing sisi jalan dan mengintegrasikannya dengan lamanya delay time pada lampu lalu lintas sehingga kemacetan di Kota Bandung khususnya dapat berkurang. Design yang kami buat cukup sederhana dan mudah diaplikasikan, sehingga diharapkan sistem yang kami buat dapat benar-benar diaplikasikan ke Bandung dalam mendukung terwujudnya Kota Bandung sebagai Smart City.
Nomor Dokumen: KU1201-01-2014.10.07 Nomor Revisi: 01 Tanggal: 5/24/2015 Halaman 17 dari 17