BAB II
LANDASAN TEORI
2.1 Teknologi RobotikPerkembangan robot sangat berkaitan erat dengan adanya kebutuhan dalam dunia industri modern yang menuntut adanya suatu alat dengan kemampuan yang tinggi yang dapat membantu menyelesaikan pekerjaan manusia ataupun untuk menyelesaikan pekerjaan yang tidak mampu diselesaikan oleh manusia.
2.1.1 Disiplin Ilmu Pembentukan Robotik
Robot Merupakan salah satu produk Mekatroika yang berkembang sangat pesat, dimana pada dasarnya merupakan gabungan dari beberapa teknologi, terutama :
Teknologi Elektronika Teknologi Perangkat Lunak Teknologi Mekanik
Mengingat sebagian besar dari robot yang ada saat ini adalah robot yang intelligent, maka dapat dikatakan bahwa robot merupakan salah satu produk dari teknologi otomasi.
2.2 CCTV
CCTV ( Closed Circuit Television ) merupakan sebuah perangkat kamera video digital yang digunakan untuk mengirim sinyal ke layar monitor di suatu ruangan atau tempat tertentu. Hal tersebut memiliki tujuan untuk dapat memantau situasi dan kondisi tempat tertentu, sehingga dapat mencegah terjadinya kejahatan atau dapat dijadikan sebagai bukti tindak kejahatan yang telah terjadi. Pada umumnya CCTV seringkali digunakan untuk mengawasi area publik seperti : Bank, Hotel, Bandara Udara, Gudang Militer, Pabrik maupun Pergudangan.
Pada sistem konvensional dengan VCR ( Video Cassete Recorder ), awalnya gambar dari kamera CCTV hanya dikirim melalui kabel ke sebuah ruangan monitor tertentu dan dibutuhkan pengawasan secara langsung oleh operator / petugas keamanan dengan resolusi gambar yang masih rendah yaitu 1 image per 12,8 seconds. Namun seiring dengan perkembangan teknologi yang sangat pesat seperti ini, banyak kamera CCTV yang telah menggunakan sistem teknologi yang modern. Sistem kamera CCTV digital saat ini dapat dioperasikan maupun dikontrol melalui personal computer atau telephone genggam, serta dapat dimonitor dari mana saja dan kapan saja selama ada komunikasi dengan internet maupun GPRS.
Arduino uno adalah board mikrokontroler berbasis Atmega328. Arduino Uno memiliki 14 pin digital input / output ( dimana 6 dapat digunakan sebagai output PWM ), 6 input analog, resonator keramik 16 MHz, koneksi USB, jack listrik, header ICSP, dan tombol reset. Uno dibangun berdasarkan apa yang diperlukan untuk mendukung mikrokontroler, sumber daya bisa menggunakan power USB ( jika terhubung ke komputer dengan kabel USB ) dan juga dengan adaptor, aki ataupun baterai.
Arduino uno berbeda dari semua papan sebelumnya dalam hal tidak menggunakan FTDI chip driver USB-to-serial. Sebaliknya, fitur Atmega16U2 ( Atmega8U2 sampai versi R2 ) diprogram sebagai konverter USB-to-serial. Revisi 2 dari uno memiliki resistor pulling 8U2 HWB yang terhubung ke tanah, sehingga lebih mudah untuk menggunakan modem DFU.
Gambar 2.1 Arduino Uno Papan arduino rev 3 memiliki fitur baru seperti berikut :
Pertama adalah pinout : ada penambahan pin SDA dan SCL yang dekat dengan pin AREF dan dua pin baru lainnya ditempatkan dekat dengan pin RESET, IOREF yang memungkinkan shield untuk beradaptasi dengan tegangan yang disediakan dari papan / board. Di masa depan, shield akan kompatibel dengan kedua papan yang menggunakan
AVR, yang beroperasi dengan 5v dan dengan arduino yang beroperasi 3.3v. kedua adalah pin tidak terhubung, yang dicadangkan untuk tujuan masa depan.
Reset sirkuit yang sangat kuat
Atmega16U2 menggantikan Atmega8U2
“uno” dalam bahasa itali berarti satu, alasan diberi nama tersebut adalah untuk menandai peluncuran arduino 1.0. uno dan versi 1.0 akan menjadi versi refrensi dari arduino, dan akan terus berkembang.
2.3.1 Spesifikasi Arduino Uno
Mikrokontroler ATmega328
Operasi tegangan 5Volt
Input tegangan Disarankan 7 – 11Volt
Input tegangan batas 6 – 20Volt
Pin I/O digital 14 ( 6 bisa untuk PWM )
Pin analog 6
Arus DC tiap pin I/O 50mA
Arus DC ketika 3.3V 50mA
Memori flash 32 KB ( ATmega328 ) dan 0,5 KB
digunakan oleh bootloader
EEPROM 1 KB ( ATmega328 )
Kecepatan clock 16 MHz
Tabel 2.2 Spesifikasi Arduino Uno
2.3.2 Sumber Daya / Power Arduino Uno
Arduino uno dapat dihidupkan melalui koneksi USB atau dengan catu daya eksternal. Sumber daya dipilih sevara otomatis. Untuk sumber daya ekternal ( non - USB ) dapat berasal baik dari adaptor AC – DC, Aki, ataupun baterai. Adaptor ini dapat dihubungkan dengan memasukan 2.1mm jack DC ke lubang listrik board. Aki dapat dihubungkan dengan memasukan kabel jack ke lubang listrik board. Dan baterai dapat dimasukan pada pin header Gnd dan Vin dari konektor Daya. Board dapat beroperasi pada pasokan eksternal dari 6 sampai 20 volt. Jika menggunakan tegangan kurang dari 6 volt mungkin jalanya program tidak akan stabil. Jika menggunakan lebih dari 12 volt, regulator tegangan bisa panas dan merusak papan. Rentang yang dianjurkan adalah 7 sampai 12 volt.
Pin listrik yang tersedia adalah sebagai berikut :
VIN. Input tegangan ke board arduino ketika menggunakan sumber daya yang dihubungkan langsung ke listrik.
5V. Pin ini merupakan output 5V yang telah diatur oleh regulator papan arduino. Board dapat diaktifkan dengan daya, baik dari colokan listrik DC ( 7-12V ), konektro USB
(5V), ataupun pin VIN board ( 7-12V). Jika memasukan tegangan melalui pin 5V atau 3.3V secara langsung ( tanpa melewati regulator ) dapat merusak papan arduino.
Tegangan pada pin 3V3. 3.3Volt dihasilkan oleh regulator on-board. Menyediakan arus maksimum 50 mA.
GND. Pin ground.
IOREF. Pin ini dipapan arduino memberikan tegangan refrensi ketika mikrokontroler beroperasi. Sebuah shiled yang dikonfigurasi dengan benar dapat membaca pin tegangan IOREF sehingga dapat memilih sumber daya yang tepat agar dapat bekerja dengan 5V atau 3.3V.
2.3.3 Memori Arduino Uno
ATmega328 memiliki 32 KB ( dengan 0,5 KB digunakan untuk bootloader ). ATmega328 juga memiliki 2 KB dari SRAM dan 1 KB EEPROM ( yang dapat dibaca dan ditulis dengan perpustakaan / library EEPROM ).
Masing – masing dari 14 pin digital uno dapat digunakan input atau output, menggunakan fungsi pinMode(), digitalWrite(), dan digitalRead(). Mereka beroperasi pada tegangan 5 volt. Setiap pin dapat memberikan atau menerima maksimum 40 mA dan memiliki resistor pull-up internal ( terputus secara default ) dari 20 – 50 kOhms. Selain itu, bebrapa pin memiliki fungsi special yaitu :
Serial: pin 0 ( RX ) dan 1 ( TX ) digunakan untuk menerima ( RX ) dan mengirimkan ( TX ) data serial TTL. Pin ini terhubung dengan pin ATmega8U2 USB-to-serial TTL. Ekternal interupsi: pin 2 dan pin 3 dapat dikonfigurasi untuk memicu interrupt pada nilai
yang rendah ( low value ), rising atau falling edge, atau perubahan nilai. Lihat fungsi attachInterrupt() untuk rinciannya.
PWM: pin 3,5,6,9,10, dan 11 menyediakan 8-bit PWM dengan fungsi analogWrite() SPI: pin 10 (SS), 11 (MOSI), 12 (MISO), 13 (SCK) mendukung komunikasi SPI dengan
mnggunakan perpustakaan SPI
LED: pin 13. Built-in LED terhubung ke digital 13. LED akan menyala ketika diberi nilai HIGH
Arduino uni memiliki 6 input analog, berlabel A0 sampai A5, yang masing – masing menyediakan resolusi 10 bit ( yaitu 1024 nilai yang berbeda ). Secara default mereka mengukur dari ground sampai 5 volt, [erubahan tengana maksimal mengunakan pin AREF dan fungsi analogReference(). Selain itu, bebrapa pin tersebut memiliki spesialisasi fungsi, yaitu TWI: pin A4 atau SDA dan A5 atau SCL mendukung komunikasi TWI menggunakan perpustakaan wire. Ada beberapa pin lainnya yang tertulis di board yaitu :
AREF. Tegangan referensi untuk input analog. Dapat digunakan dengan fungsi analogReference().
Reset. Gunakan LOW untuk me-reset mikrokontroler. Biasanya digunakan untuk menambahkan tombol reset.
2.3.5 Komunikasi Arduino Uno
Arduino uno memiliki sejumlah fasilitas untuk berkomunikasi dengan komputer, arduino lain, atau mikrokontroler lainnya. Atmega328 menyediakan UART TTL (5V) komunikasi serial, yang tersedia pada pin digital 0 ( RX ) dan 1 ( TX ). Pada Atmega16U2 saluran komunikasi serial melalui USB dan muncul sebagai com port virtual untuk perangkat lunak pada komputer. Firmware 16U2 menggunakan standar driver USB COM, dan tidak ada driver eksternal diperlukan. Namun, pada windows, diperlukan file. Inf. Perangkat lunak arduino termasuk monitor serial yang memungkinkan data tekstual sederhana akan dikirm ke dan dari papan arduino. RX dan TX LED dipapan akan berkedip ketika data sedang dikirm melalui chip USB-to-serial dan koneksi USB komputer ( tetapi tidak untuk komunikasi serial pada pin 0 dan 1 ). Atmega328 juga mendukung I2C ( TWI ) dan komunikasi SPI. Perangkat lunak arduino termasuk perpustakaan wire berfungsi menyederhanakan penggunaan bus I2C. Untuk komunikasi SPI, menggunakan perpustakaan SPI.
2.3.6 Pemrograman Arduino Uno
Pada membuatan alat mobil kontrol berbasis android dengan monitor camera CCTV ini harus memasukan codingan atau bahasa program Arduino uno, dan dapat diprogram dengan
software arduino. Bahasa pemrograman arduino terbagi menjadi tiga golongan ( secara global ), yaitu structure (struktur ), value / nilai ( variables dan constants ), dan function ( fungsi ). Penulisan akan memaparkan bahasa – bahasa tersebut yang disajikan dalam daftar dibawah ini :
struktur variabel Fungsi
Setup() Loop() Kontrol struktur If If... else For While Do... while Break Continue Return Goto Further syntax ; (titik koma) {} (kurung kurawal) Constants HIGH / LOW INPUT / OUTPUT INPUT_PULLUP LED_BUILTIN True / false Integer constants Floating point constants
Tipe data Void Boolean Char Unsigned char Byte Int Unsigned int DigitalI/O analogReference() analogRead() analogWrite() – PWM due only analogReadResolution() analogWriteResolution() advanced I/O tone() noTone() shiftOut() shiftIn() pu1seIn()
// (komentar satu baris) /**/ (komentar banyak baris #define #include Operator aritmatika = (penugasan) + (penambahan) -( pengurangan) * (perkalian) / (pembagian) % (modulo) Operator pembanding == (sama dengan) != (tidak sama dengan)
< (kurang dari) >(lebih besar dari) <= (kurang dari / sama
dengan) Word Long Unsigned long Short Float Double String – char array
String – object Array Konversi Char() Byte() Int() Word() Long() Float()
Ruang lingkup variabel dan kualifikasi variable scope waktu millis() micros() delay() delayMicroseconds() matematika min() max() abs() constrain() map() pow() sqrt() trigonometri sin() cos() tan()
Operator pointer access *(dereference) &(reference) Operator bitwise &(dan) | (atau) ^ (xor) ~ (tidak) << (bitshift kiri) >> (bitshift kanan) Operator compound ++ (increment) --(decrement) += (addition) -= (subtraction) *= (multiplication) /= (division) &= (bitwise and)
static volatile const Utility Sizeof() bilangan acak randomseed() random()
bits dan bytes
lowByte() highByte() bitRead() bitWrite() bitSet() bitClear() bit() interupsi eksternal attachInterrupt() detachInterrupt() interupsi interrupts()
|= (bitwise or) noInterrupts()
komunikasi
Serial Stream
USB (Khusus Leonardo dan Due)
Keyboard Mouse
Tabel 2.3 Bahasa Pemograman Arduino Uno 2.3.7 Perlindungan Arus USB Arduino Uno
Ardunio uno memiliki polyfuse reset yang melindungi port USB komputer dari arus pendek atau berlebih. Meskipun kebanyakan komputer memberikan perlindungan internal sendiri, sekering menyediakan lapisan perlindungan tambahan. Jika lebih dari 500mA, sekering otomatis bekerja.
2.3.8 Karakteristik Fisik Arduino Uno
Panjang maksimum dan lebar PCB uno masing – masing adalah 2,7 dan 2,1 inci, dengan konektor USB dan colokan listrik yang melampaui dimensi tersebut. Empat lubang sekrup
memungkinkan board harus terpasang ke permukaan rangak mobil kontrol. Perhatikan bahwa jarak antara pin digital 7 dan 8 adalah 0,16”,tidak seperti pin lainnya.
2.4 Driver Motor Arduino L298N
Driver motor arduino L298N adalah motor shield tegangan tinggi, arus tinggi chip driver motor, dengan tegangan tertinggi kerja 46V, saat operasi kontinyu dari 2A, dan puncak arus sesaat hingga 3A chip berisi dua “H jembatan” yang tegangan tinggi dan tinggi driver penuh jembatan saat ini yang secara langsung dapat mendorong dua motor DC yang nantinya akan difungsikan untuk memprogram kendali motor depan dan motor belakang pada mobil kontrol berbasis android dengan monitor kamera CCTV.
arduino L298N drive motor papan ekspansi V03 adalah versi terbaru dari arduino drive motor. Perubahan utama adalah untuk menambahkan switch agar lebih mudah memenuhi persyaratan aplikasi motor yang berbeda dan tegangan yang ditetapkan.
Dua tegangan yang berbeda diperlukan untuk operasi forum ini : +5V untuk bagian logika dan motor power, yang mungkin 5 sampai 30 + volt. Ada berbagai cara untuk mendapatkan yang dibutuhkan +5V untuk chip. Berikut ini adalah switch yang berbeda yang tersedia pada V03 :
VLO ( logic voltage : onboard regulator )
Driver motor IC L298N membutuhkan dua tegangan : tegangan logika dan tegangan bermotor. Tegangan logika 5V biasamya kurang dari tegangan motor ( misalnya 7.2V,9V atau 12V ). Untuk mengkonversi motor tegangan terminal dari menyusahkan menjadi berguna 5V logika tegangan, papan driver motor menyediakan rangkaian regulator tegangan yang diaktifkan dengan tegangan kurang dari 20V, sehingga jika motor lebih besar dari 20V maka tidak akan dapat menggunakan sirkuit konverter tegangan.
VLC ( logic voltage terhubung )
Driver motor arduino L298N juga dapat menggunakan + daya 5V logika dari arduino. Dalam hal ini, saklar VLC dihidupkan.
VM ( voltage motor )
VM ( voltage motor ) adalah pemilihan tegangan bermotor. Ada dua cara untuk memberikan daya untuk motor : ( saklar pada posisi menyusahkan ) Vin pin melalui papan arduino ( saklar pada posisi VIN ) dan dari terminal menyusahkan, tegangan yang berbeda kombinasi scenerios :
Secara umum, arduino dapat menggunakan 6V ~ 12V dari catu daya eksternal ( terhubung ke pin Vin ). Jika memiliki tegangan bermotor dalam kisaran ini, hanya dapat digunakan sebagai catu daya eksternal untuk kedua arduino dan daya motor. Dalam hal ini difungsikan untuk mengatur switch :
VLO : OFF, tidak menggunakan regulator tegangan
VLC : ON, dan 5V konektor pin arduino untuk papan ekspansi akan memberikan drive motor tegangan logika
VM : VIN, dan pin Vin pada arduino akan terhubung ke motor penggerak
2. Tegangan motor kurang dari 6V
Kasus ini hanya dapat diperpanjang melalui drive motor papan GND dan menyusahkan dua terminal untuk memasok ke motor, maka papan ekspansi drive motor 5V rangkaian konverter tegangan logika tidak bekerja ( menyusahkan tegangan terlalu rendah ), jadi hanya arduino papan yang terhubung ke papan ekspansi 5V pin yang tersedia untuk tegangan motor drive 5V logika. Dalam hal ini papan ekspansi bermotor diatur ke :
VLO : OFF, tidak menggunakan regulator tegangan
VLC : ON, dan 5V konektor pin arduino untuk papan ekspansi akan memberikan drive motor tegangan logika
VM : menyusahkan, daya motor melalui terminal menyusahkan / GND
Logika tegangan suplai bisa datang dari regulator onboard. Beralih pengaturan :
VLO : ON, onboard, regulator tegangan yang digunakan VLC : OFF, tidak digunakan
VM : menyusahkan, daya motor melalui terminal menyusahkan / GND.
4. Tegangan motor 20V - 46V
regulator tegangan onboard, tidak dapat digunakan karena tegangan suplai motor terlalu tinggi.
VLO : OFF, tidak menggunakan regulator tegangan
VLC : ON, dan 5V konektor pin arduino untuk papan ekspansi akan memberikan drive motor tegangan logika
VM : menyusahkan, daya motor melalui terminal menyusahkan / GND
Perisai motor ini memungkinkan arduino untuk mendorong dua channel DC motor. Menggunakan chip L298N yang pengiriman arus hingga 2A setiap saluran. Kontrol kecepatan dicapai melalui PWM konvensional yang dapat diperoleh dari PWM keluaran arduino itu pin 5 dan 6. Mengaktifkan / menonaktifkan fungsi kontrol motorik ditandai dengan arduino digital 4 dan 7. Motor perisai dapat diaktifkan langsung dari arduino atau sumber daya eksternal. Hal ini sangat diajurkan untuk menggunakan catu daya ekseternal untuk menyalakan perisai bermotor.
2.4.1 Spesifikasi Driver Motor Shiled L298N Tabel 2.5 Spesifikasi Driver motor 2.4.2 Pin pada Driver Motor Shiled L298N
Dual H-brigde motor motor untuk mengontrol dua roda mobil kontrol berbasis android dengan monitor camera CCTV. Ini dirancang untuk mengarahkan beban induktif, seperti relay, solenoida, DC dan melangkah motor. Hal ini juga dapat memberitahukan dua independen motor DC, mengontrol kecepatan dan arah masing – masing.
“ PWM mode “
Digital 4 motor kontrol 1 arah Digital 5 motor kontrol 1 PWM Digital 6 motor kontrol 2 PWM Digital 7 motor kontrol 2 arah
Logic control voltage 5V ( dari arduino )
Motor driven voltage 4.8 ~ 35V ( dari arduino atau eksternal sumber daya )
Logika pasokan iss saat ini ≤ 36 mA
Motor driven io saat ini ≤ 2A
Maksimum konsumsi daya 25 W ( T = 75 °C )
PWM, PLL kecepatan mode kontrol
Kontrol level sinyal Tinggi : 2.3V ≤ Vin ≤ 5V Low : -0.3V ≤ Vin ≤ 1.5V
“ PLL mode “
Digital 4 motor 1 aktifkan kontrol Digital 5 motor kontrol 1 arah Digital 6 motor kontrol 2 arah Digital 7 motor 2 aktifkan kontrol 2.5 Motor DC
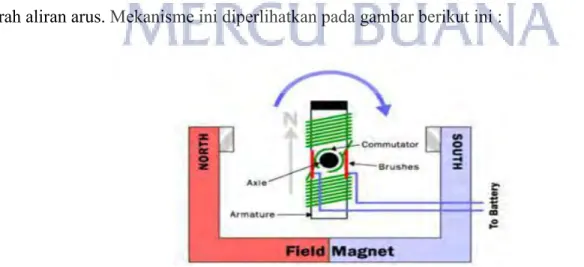
Motor DC adalah sebuah piranti elektronik yang mengubah energi listrik menjadi energi mekanik berupa gerak rotasi. Pada motor DC terdapat jangkar dengan satu atau lebih kumparan terpisah. Tiap kumparan berujung pada cincin belah ( komutator ). Dengan adanya insulator antara komutator, cincin belah dapat berperan sebagai saklar kutub ganda ( double pole, double
throw switch ). Motor DC bekerja berdasarkan prinsip gaya lorentz, yang menyatakan ketika
sebuah konduktor beraliran arus diletakan dalam medan magnet, maka sebuah gaya ( yang dikenal dengan gaya lorentz ) akan tercipta secara ortogonal diantara arah medan magnet dan arah aliran arus. Mekanisme ini diperlihatkan pada gambar berikut ini :
Motor DC yang digunakan adalah motor DC dengan magnet permanen untuk membuat alat mobil kontrol berbasis android dengan monitor camera CCTV. Motor DC jenis ini memiliki dua buah magnet permanen sehingga timbul medan magnet diantara kedua magnet tersebut. Didalam medan magnet inilah jangkar / rotor berputar. Jangkar yang terletak ditengah motor memiliki jumlah kutub yang ganjil dan pada setiap kutubnya terdapat lilitan. Lilitan ini terhubung ke area kontak yang disebut komutator. Sikat ( brushes ) yang terhubung ke kutub positif dan negatif motor memberikan daya lilitan sedemikian rupa sehingga kutub yang satu akan ditolak oleh magnet permanen yang berbeda di dekatnya, sedangkan lilitan lain akan ditarik ke magnet permanen yang lain sehingga menyebabkan jangkar berputar. Ketika jangkar berputar, komutator mengubah lilitan yang mendapat pengaruh polaritas medan magnet sehingga jangkar akan terus berputar selama kutub positif dan negatif motor diberi daya. Kecepatan putar motor DC ( N ) dirumuskan dengan persamaan berikut :
VTM – I A R A
N =
K O
Keterangan :
VTM : tegangan terminal
RA : hambatan jangkar motor
K : konstanta motor
o : fluk magnet yang terbentuk pada motor
pengendalian kecepatan putar motor DC dapat dilakukan dengan mengatur besar tegangan terminal motor VTM . metode lain yang biasanya digunakan untuk mengendalikan kecepatan
motor DC adalah dengan teknik modulasi lebar pulsa atau pulse width modulation ( PWM ). 2.5.1 Spesifikasi Motor DC Voltage 12V motor model 56P Rasio gear 1 : 31 Gearbox length 20 mm No – load speed 181 Rpm Rated speed 137 Rpm Rate torque 0.57 kg / cm Rate current 200 mA
Max momentary torque 0.86 kg / cm
weight 85g
Tabel 2.7 Spesifikasi Motor DC 2.5.2 Teori H-Bridge MOSFET :
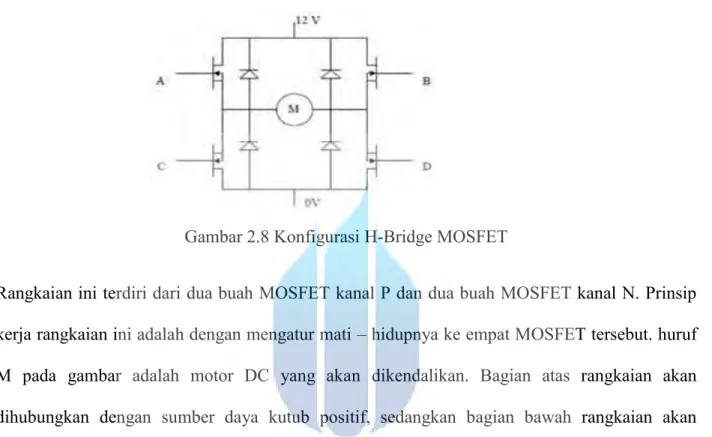
H-bridge adalah sebuah perangkat keras berupa rangkaian yang berfungsi untuk menggerakan motor. Rangkaian ini diberi nama H-bridge karena bentuk rangkaiannya yang menyerupai huruf H seperti pada gambar berikut ini :
Gambar 2.8 Konfigurasi H-Bridge MOSFET
Rangkaian ini terdiri dari dua buah MOSFET kanal P dan dua buah MOSFET kanal N. Prinsip kerja rangkaian ini adalah dengan mengatur mati – hidupnya ke empat MOSFET tersebut. huruf M pada gambar adalah motor DC yang akan dikendalikan. Bagian atas rangkaian akan dihubungkan dengan sumber daya kutub positif, sedangkan bagian bawah rangkaian akan dihubungkan dengan sumber daya kutuf negatif. Pada saat MOSFET A dan MOSFET D on sedangkan MOSFET B dan MOSFET C off, maka sisi kiri dari gambar motor akan terhubung dengan kutup positif dari catu daya, sedangkan sisi sebelah kanan motor akan terhubung dengan kutup negatif dari catu daya sehingga motor akan bergerak searah jarum jam yang ada pada gambar berikut ini :
Gambar 2.9 Pada saat MOSFET A dan MOSFET D on
Sebaiknya, jika MOSFET B dan MOSFET C on sedangkan MOSFET A dan MOSFET D off, maka sisi kanan motor akan terhubung dengan kutub positif dari catu daya sedangkan sisi kiri motor akan terhubung dengan kutub negatif dari catu daya. Maka motor akan bergerak berlawanan arah jarum jam yang ada pada gambar berikut ini :
Gambar 2.10 Pada saat MOSFET B dan MOSFET C on
Konfigurasi lainnya adalah apabila MOSFET A dan MOSFET B sedangkan MOSFET C dan MOSFET D off, konfigurasi ini akan menyebabkan sisi kiri dan sisi kanan motor terhubung pada kutub yang sama yaitu kutub positif sehingga tidak ada perbedaan tegangan diantara dua buah
polaritas motor, sehingga motor akan diam. Konfigurasi seperti ini disebut dengan konfigurasi break. Begitu pula jika MOSFET C dan MOSFET D saklar on, sedangkan MOSFET A dan MOSFET C off, kedua polaritas motor akan terhubung pada kutub negatif dari catu daya. Maka tidak ada perbedaan tegangan pada kedua polaritas motor, dan motor akan diam. Konfigurasi yang harus dihindari adalah pada saat MOSFET A dan MOSFET C on secara bersamaan atau MOSFET B dan MOSFET D on secara bersamaan. Pada konfigurasi ini akan terjadi hubungan arus singkat antara kutub positif catu daya dengan kutub negatif catu daya.
2.5.3 Konfigurasi Pengujian H-brigde MOSFET
A B C D Aksi
1 0 0 1 Motor berputar searah jarum jam
0 1 1 0 Motor berputar berlawanan arah jarum jam
0 0 0 0 Bebas
0 0 1 1 pengereman
1 1 0 0 pengereman
Tabel 2.11 Konfigurasi Pengujian H-brigde MOSFET 2.6 Bluetooth HC – 05
Modul bluetooth seri HC memiliki banyak jenis atau varian, yang secara garis besar terbagi menjadi dua yaitu jenis „ industrial series „ yaitu HC – 03 dan HC – 04 serta „ civil series „ yaitu HC -05 dan HC - 06. Modul bluetooth serial, yang selanjutnya disebut dengan modul BT saja digunakan untuk mengirimkan data serial TTL via bluetooth. Modul BT ini terdiri dari dua jenis yaitu master dan slave.
Gambar 2.12 Bluetooth HC-05
Bluetooth HC – 05 adalah sebuah modul bluetooth SPP ( serial port protocol ) yang mudah digunakan untuk komunikasi serial wireless ( nirkabel ) yang mengkonversi port serial ke bluetoot. HC – 05 menggunakan modulasi bluetooth V2.0 + EDR ( enchanced data rate ) 3 Mbps dengan memanfaatkan gelombang radio berfrekuensi 2,4 Ghz. Memiliki kemampuan lebih yaitu bisa mengubah mode kerjanya menjadi master atau slave serta diakses dengan lebih banyak AT command, modul ini sangat direkomendasikan, terutama dengan flexibilitasnya dalam pemilihan mode kerjanya. HC – 05 memiliki 2 mode konfigurasi, yaitu AT mode dan Communication mode yang berfungsi untuk melakukan komunikasi bluetooth dengan piranti mobil kontrol berbasis android dengan monitor camera CCTV.
Seri modul BT HC bisa dikenali dari nomor serinya, jika nomor serinya genap maka modul BT tersebut sudah diset oleh pabrik, bekerja sebagai slave atau master dan tidak dapat diubah mode
kerjanya, contoh adalah HC – 06-S. Modul BT ini akan bekerja sebagai BT slave dan tidak bisa diubah menjadi master, demikian juga sebaliknya misalnya HC - 04M. Default mode kerja untuk modul BT HC dengan seri genap adalah sebagai slave. Sedangkan modul BT HC dengan nomor seri ganjil, misalkan HC – 05, kondisi default biasanya diset sebagai slave mode, tetapi bisa mengubahnya menjadi mode master dengan AT command tertentu.
Penggunaan utama dari modul BT ini adalah menggantikan komunikasi serial via kabel, sebagai contoh :
1. Jika akan menghubungkan dua sistem mikrokontroler agar bisa berkomunikasi via serial port maka dipasang sebuah modul BT master pada satu sistem dan modul BT slave pada sistem lainnya. Komunikasi dapat langsung dilakukan setelah kedua modul melakukan pairing. Koneksi via bluetooth ini menyerupai komunikasi serial biasa, yaitu adanya TXD dan RXD.
2. Jika sistem mikrokontroler dipasangi modul BT slave maka ia dapat berkomunikasi dengan perangkat lain semisal PC yang dilengkapi adapter BT ataupun dengan perangkat ponsel, smartphone dan lain – lain.
3. Saat ini banyak perangkat seperti printer, GPS modul dan lain – lain yang bekerja menggunakan media bluetooth, tentunya sistem mikrokontroler yang dilengkapi dengan BT master dapat bekerja mengakses device – device tersebut
pemakaian module BT pada sistem komunikasi baik dua sistem mikrokontroler maupun antara suatu sistem ke device lain tidak perlu menggunakan driver, tetapi komunikasi dapat terjadi dengan dua syarat yaitu :
1. Komunikasi terjadi antara modul BT master dan BT slave, komunikasi tidak akan pernah terjadi jika kedua modul sama – sama master atau sama – sama slave, karena tidak akan pernah pairing diantara keduanya
2. Password yang dimasukan cocok 2.6.1 Spesifikasi Bluetooth HC – 05
Hardware :
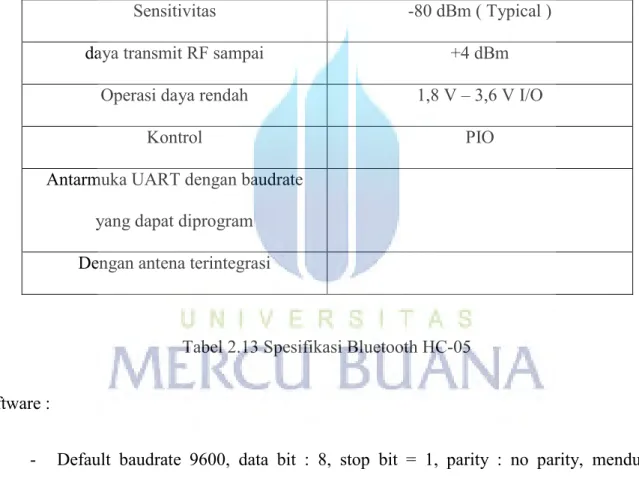
Sensitivitas -80 dBm ( Typical )
daya transmit RF sampai +4 dBm
Operasi daya rendah 1,8 V – 3,6 V I/O
Kontrol PIO
Antarmuka UART dengan baudrate yang dapat diprogram Dengan antena terintegrasi
Tabel 2.13 Spesifikasi Bluetooth HC-05 Software :
- Default baudrate 9600, data bit : 8, stop bit = 1, parity : no parity, mendukung baudrate : 9600, 19200, 38400, 57600, 115200, 230400 dan 460800.
- Auto koneksi pada saat device dinyalakan ( default ).
- Auto reconnect pada menit ke 30 ketika hubungan putus karena range koneksi. Jarak sinyal dari HC – 05 adalah 30 meter, dengan kondisi tanpa halangan.
2.7 Limit Switch
Limit switch merupakan jenis saklar yang dilengkapi dengan katup yang berfungsi menggantikan tombol. Prinsip kerja limit switch sama seperti saklar push ON yaitu hanya akan menghubung pada saat katupnya ditekan pada batas penekanan tertentu yang telah ditentukan dan akan memutuskan saat saat katup tidak ditekan. Limit switch termasuk dalam kategori sensor mekanis yaitu sensor yang akan memberikan perubahan elektrik saat terjadi perubahan mekanik pada sensor tersebut. Penerapan dari limit switch adalah sebagai sensor posisi suatu benda ( objek ) yang bergerak. Simbol limit switch ditunjukan pada gambar berikut ini :
Gambar 2.14 Simbol Limit Switch Limit switch umumnya digunakan untuk :
1. Memutuskan dan menyambungkan rangkaian menggunakan objek atau benda lain. 2. Menghidupkan daya yang besar, dengan sarana yang kecil.
3. Sebagai sensor posisi atau kondisi suatu objek.
Prinsip kerja limit switch diaktifkan dengan penekanan pada tombolnya yang ada pada batas / daerah yang telah ditentukan sebelumnya sehingga terjadi pemutusan atau penghubungan rangkaian dari rangkaian tersebut. Limit switch memiliki 2 kontak yaitu NO ( normally Open ) dan kontak NC ( normally Close ) dimana salah satu kontak akan aktif jika tombolnya tertekan. Kontruksi dan simbol limit switch dapat dilihat seperti gambar berikut ini :
Gambar 2.15 Kontruksi dan simbol limit switch 2.7.1 Spesifikasi Limit Switch
merk Omron
type z-15gw-b
15a Ac220v
0.5a Dc125v
2.8 Accu 12V
Baterai atau aki, atau biasa juga disebut accu adalah sel listrik dimana didalamnya berlangsung proses elektrokimia yang reversible ( dapat berbalikan ) dengan efesiensinya yang tinggi. Yang dimaksud dengan proses elektrokimia revesibel adalah didalam baterai dapat berlangsung proses pengubahan kimia menjadi tenaga listrik ( proses pengosongan ), dan sebaliknya dari tenaga listrik menjadi kimia, pengisian kembali dengan cara regenerasi dari elektroda – elektroda yang dipakai, yaitu dengan melewatkan arus listrik dalam arah ( polaritas ) yang berlawanan di dalam sel.
Gambar 2.17 Accu 12V 2.8.1 Fungsi Accu 12V
baterai atau aki berfungsi untuk menyimpan energi listrik dalam bentuk energi kimia, yang akan digunakan untuk mensuplai ( menyediakan ) listrik ke sistem stater, sistem pengapian, lampu – lampu dan komponen – komponen kelistrikan lainnya
2.8.2 Kontruksi Accu 12V
disebut baterai timah, ruangan didalamnya dibagi menjadi beberapa sel dan didalam masing – masing sel terdapat beberapa elemen yang terendam didalam elektrolit.
Gambar 2.18 Kontruksi Accu 12V
Jumlah tenaga listrik yang disimpan dalam baterai dapat digunakan sebagai sumber tenaga listrik tergantung pada kapasitas baterai dalam satuan ampere jam ( AH ). Jika pada kontak baterai tertulis 12 volt 60 AH, berarti baterai tersebut mempunyai tegangan 12 volt dimana jika baterai tersebut digunakan selama 1 jam dengan arus pemakaian 60 amper, maka kapasitas baterai tersebut setelah 1 jam akan kosong ( habis ). Kapasitas baterai tersebut juga dapat menjadi kosong setelah 2 jam jika arus pemakaian hanya 30 amper. Disini terlihat bahwa lamanya pengosongan baterai ditentukan oleh besarnya pemakaian arus listrik dari baterai tersebut. Semakin besar arus yang digunakan, maka akan semakin cepat terjadi pengosongan baterai, dan sebaliknya, semakin kecil arus yang digunakan, maka akan semakin lama pula baterai mengalami pengosongan. Besarnya kapasitas baterai sangat ditentukan oleh luas permukaan plat atau banyaknya plat baterai. Jadi dengan bertambahnya luas plat atau dengan bertambahnya jumlah plat baterai maka kapasitas baterai juga akan bertambah. Sedangkan tegangan accu ditentukan oleh jumlah daripada sel baterai, dimana satu sel baterai biasanya dapat menghasilkan tegangan kira – kira 2 sampai 2,1 volt. Tegangan listrik yang terbentuk sama dengan jumlah
tegangan listrik tiap – tiap sel. Jika baterai mempunyai enam sel, maka tegangan baterai standar tersebut adalah 12 volt sampai 12,6 volt. Biasanya setiap sel baterai ditandai dengan adanya satu lubang pada kotak accu bagian atas untuk mengisi elektrolit aki.
2.8.3 Spesifikasi Accu 12V
Merk Yuasa
Type LEAD – ACID 12V 1.2AH
Battery capacity 1.2Ah
Battery IEC code -
Battery size code -
Battery technology Lead acid
Battery terminal Quick connect
Battery voltage 12V External depth 97mm External diameter - External height 55mm External width 48mm SVHC No SVHC ( 16-jun-2014 ) Weight 570g Height max 54.5mm Output voltage 12V
2.9 ASCII Dan Kode ASCII
ASCII atau ( American Standard Code for Information Interchange ) merupakan suatu standar internasional dalam kode huruf dan simbol yang lebih bersifat universal, contohnya 36 adalah karakter “ $ “.
Kode ASCII sebenarnya memiliki komposisi bilangan biner sebanyak 7 bit. Namun, ASCII disimpan sebagai sandi 8 bit dengan tambahan ini sering digunakan untuk uji prioritas.
Karakter Kontrol pada ASCII dibedakan menjadi 5 kelompok sesuai dengan penggunaan yaitu meliputi :
- Logical communication, - Device control,
- Information separator, - Code extention,
- Dan physical communication,
Code ASCII ini banyak dijumpai pada papan ketik ( keyboard ) computer atau instrument – instrument digital.
Jumlah kode ASCII adalah 255 kode. Ode ASCII 0..127 merupakan kode ASCII untuk manipulasi teks sedangkan kode ASCII 128...255 merupakan kode ASCII untuk manipulasi grafik.
Gambar 2.20 ASCII 2.10 Kamera WiFi Go Pro Hero 4
Go Pro merupakan kamera yang di produksi oleh perusahaan yang bermarkas di San Mateo, California, Amerika Serikatini membawa komponen internal baru, yang di klaim mampu
meningkatkan kwalitas gambar yang di hasilkan. GoPro merupakan action camera, yaitu kamera yang digunakan untuk aktivitas luar ruangan. Meski demikian, tak jarang juga orang mengunakannya di dalam ruangan. Untuk pengambilan video, Go Pro mampu mengusung kemampuan 30 fps pada resolusi yang sama. Untuk resolusi 1080p dan 720p pun ditingkatkan menjadi 120 dan 240 fps. Kemampuan mengambil gambar dengan fps yang tinggi sangatlah penting bagi sebuah action camera. Peningkatan dari segi fotografi meliputi peningkatan resolusi dari 12 menjadi 13 MP, kemampuan multi exposure HDR yang sebelumnya tak dimilki kamera lain, wide Dynamic Range ( WDR ) tone mapping dan Electronic Image Stabilization ( EIS ). Agar gambar yang dihasilkan lebih stabil.
Gambar 2.21 Kamera WiFi Go Pro Hero 4
Satu hal yang cukup menarik adalah kebocoran spesifikasi GoPro Hero 4 ini dilakukan oleh pihak yang memproduksi prosesor dari kamera tersebut. Prosesor yang dinamakan Ambarella A9 Chip ini merupakan sebuah soC yang berisi dual A9 ARM Core ® CortexTM-A9 prosesor dengan kecepatan 1GHz yang memiliki sebuah FPU accelerator. Inilah yang menjadi “ otak “ dari beberapa peningkatan performa dari Hero 4.