Demodulasi Berdasarkan Konsensus yang Terdistribusi pada
Jaringan Sensor Nirkabel
Ari Endang Jayati 1*, Wirawan 2
Jurusan Teknik Elektro ITS, Surabaya, Indonesia11* email : [email protected]
Jurusan Teknik Elektro ITS, Surabaya , Indonesia 2
Abstrak
Pada sistem wireless cooperative communication semua pengguna tertarik pada isi pesan yang dikirimkan, tetapi tidak memperhitungkan kualitas sinyal dari setiap pesan. Misalnya sebuah kelompok sensor akan mendemodulasi sebuah pesan umum yang dikirimkan antena Access Point (AP). Untuk alasan efisiensi sumber energi, AP mengirim informasi terbatas dan sensor tidak bisa minta pengiriman ulang ketika dideteksi ada error. Karena keterbatasan sumber daya maka sensor hanya bisa melakukan proses demodulasi linier. Sedangkan pada sistem deteksi terdistribusi jaringan sensor nirkabel, sejumlah sensor disebar secara acak untuk monitoring kondisi lingkungan dan saling bekerja sama melakukan deteksi untuk menggabungkan informasi yang diperoleh sehingga dapat menentukan atau membedakan dua atau lebih hipotesa. Algoritma yang digunakan adalah konsensus terdistribusi dimana data yang diperoleh oleh setiap sensor akan diperbaharui setiap waktu oleh sensor tetangganya. Hasil pendeteksian tersebut akan diberikan kepada sensor tetangganya kemudian dilakukan penggabungan sehingga diperoleh hasil deteksi yang optimal dari informasi yang ada. Pada penelitian ini akan membandingkan dua metode pada demodulasi sistem terdistribusi yaitu Zero Forcing (ZF) dan Minimum Mean Squared Error (MMSE) jika menerapkan algoritma konsensus Method of Multiplier (MoM) dengan parameter yang digunakan untuk untuk mengukur kinerja akan ketahanan terhadap noise adalah Signal to Noise Ratio (SNR) dan Bit Error Rate (BER).
Kata Kunci : demodulasi linier, jaringan sensor nirkabel, method of multilplier, minimum mean squared error, zero
forcing
1. Pendahuluan
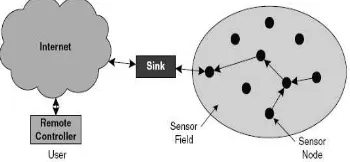
Pada saat ini jaringan sensor nirkabel berkembang sangat pesat, hal ini dikarenakan jaringan sensor nirkabel mempunyai aplikasinya yang sangat luas diberbagai bidang kehidupan, seperti bidang militer, kesehatan, perumahan, industri, transportasi dan lingkungan. Di bidang militer contohnya, penyebaran yang cepat dan dinamis serta self-organization dari jaringan sensor membuat sistem ini menjadi suatu sistem penginderaan yang sangat menjanjikan untuk keperluan militer diantaranya dalam memberi aba-aba, sistem kontrol, dan intelijen. Dibidang kesehatan, jaringan sensor dapat digunakan untuk memonitor kondisi pasien, dinama data psikologis pasien dapat diakses menggunakan remote oleh dokter. Jaringan sensor juga dapat digunakan untuk mendeteksi penyebaran polutan/bahan kimia asing pada udara dan air, dapat membantu mengindentifikasi jenis, kadar dan lokasi dari polutan (Akyldiz, 2002).
Sebuah jaringan sensor nirkabel terdiri dari sejumlah sensor yang disebar pada suatu daerah tertentu yang disebut sebagai sensor field/medan sensor. Penyebaran sensor ini dapat dilakukan secara acak atau mengikuti suatu pola tertentu.
Masing-masing sensor dilengkapi dengan beberapa komponen utama yaitu sensor, memori dan peralatan komunikasi.
Gambar 1. Arsitektur Jaringan Sensor Nirkabel (Anastasi, 2009)
Pada sistem deteksi terdistribusi jaringan sensor nirkabel, sejumlah sensor disebar secara acak untuk monitoring kondisi lingkungan dan saling bekerja sama melakukan deteksi untuk menggabungkan informasi yang diperoleh sehingga dapat menentukan atau membedakan dua atau lebih hipotesa. Permasalahan dalam jaringan sensor nirkabel sistem terdistribusi adalah bagaimana mendeteksi pesan seefisien mungkin yang dikirimkan multiantena Access
Point (AP) ke suatu jaringan sensor nirkabel.
Pada penelitian ini akan membandingkan dua metode pada demodulasi sistem terdistribusi yaitu Zero Forcing dan Minimum Mean Squared
Error menggunakan algoritma konsensus Method
of Multiplier. Parameter yang digunakan untuk
mengukur kinerja ketiga metode tersebut adalah
Signal to Noise Ratio (SNR) dan Bit Error Rate
(BER).
2. Model Sistem
Multi antena AP dengan M antena memetakan matriks ruang-waktu S ukuran MxN menjadi alfabet terbatas dengan N adalah jumlah slot waktu. AP mentransmisikan S ke jaringan sensor nirkabel dengan jumlah sensor J. Kanal antara AP dan sensor bersifat fading dengan koefisen fading
hj yang bersifat statik terhadap waktu tetapi berubah dari transmisi ke transmisi. Jaringan sensor nirkabel dimodelkan sebagai graph := {ℰ, } dimana := {1, . . . , } menggambarkan himpunan sensor dan ℰ⊂ × adalah himpunan link komunikasi (graph edges). Himpunan tetangga dari sensor j dinotasikan dengan ⊆
. Model sistem dapat dilihat pada gambar 2.
Gambar 2. Model Sistem
2.1Sensor
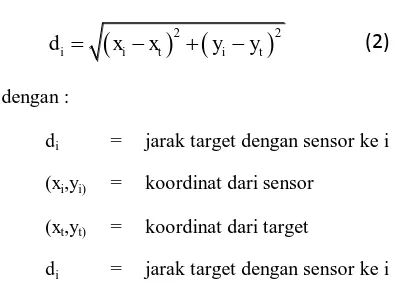
Pada makalah ini digunakan pemodelan penyebaran sensor dengan menggunakan distribusi uniform. Pemodelan penyebaran sensor dengan menggunakan distribusi uniform dapat dirumuskan dengan:
Model pendeteksian sensor yang digunakan adalah model deteksi biner. Jangkauan sensing
dari sensor dimodelkan isotropik dengan radius
tertentu yang disebut range sensor (rs). Jarak diasumsikan terdeteksi dan jika diluar range sensor maka tidak terdeteksi.
2.2 Kanal
Data dari antena Access Point (AP) dikirimkan ke sensor melalui kanal fading dengan koefisien fading hj yang bersifat statik terhadap waktu transmisi AP ke sensor, tetapi berubah dari transmisi ke transmisi. Blok yang diterima yj ukuran N x 1 pada sensor ke-j diberikan hubungan input output sbb :
j
Topologi yang digunakan adalah topologi serial. Komunikasi antara sensor yang berdekatan dalam hop tunggal melalui saluran yang bersifat ideal dan time-invariant. Noise kanal adalah
additive white noise Gaussian dan tidak
berkorelasi antar kanal.
2.3 Sumber
dikatakan terhubung apabila terdapat suatu edge
diantara node tersebut. Komposisi dari graph
dapat dituliskan dengan matrix adjacency N x N,
]
[
AnA
dimanaA
nl
1
jika(
n
,
l
)
E
dan lainnya bernilai 0. Dari degree yang didapatkan dapat diperoleh suatu matrix diagonal)
Untuk jaringan sensor nirkabel yang mempunyai jangkauan transmisi kecil (100 m2), mempunyai rata-rata delay spread kecil dan kecepatan simbol rendah. Sehingga sangat beralasan pada jaringan sensor nirkabel diasumsikan flat fading.
2.6 Modulasi Digital
adalah sinyal berbentuk pulsa yang mempunyai nilai bukan nol pada interval
0
t
Tbdan nilai nol selain interval tersebut. Maka kedua sinyal tersebut dikatakan antipodal, dan nilai bit 1dan 0 bisa direpresentasikan dengan Ebdan
Eb
. Probabilitas bit error dari BPSK(Binary Phase Shift Keying) adalah :
. (5)
2.7 Demodulator Linier
Ada 2 jenis algoritma demodulator linier terdistribusi yaitu Zero Forcing (ZF) dan
Minimum Mean-Square Error (MMSE). ZF akan
membalikkan efek kanal dengan cara mengalikan vektor sinyal yang diterima dengan pseudo-inverse dari matrik kanal (Proakis, 2008). Bentuk demodulator Centralized Zero Forcing sebagai berikut :
Sedangkan persamaan demodulator
Centralized MMSE bisa dituliskan
y
dituliskan dalam bentuk tertutup (Zhu, 2010) :y
2.8 Method of Multiplier (MoM)
Algoritma konsensus terdistribusi adalah suatu algoritma dimana data yang diperoleh oleh setiap sensor akan diperbaharui setiap waktu oleh sensor tetangganya. Hasil pendeteksian tersebut akan diberikan kepada sensor tetangganya kemudian dilakukan penggabungan sehingga diperoleh hasil deteksi yang optimal dari informasi yang ada.
Pertukaran pesan antara sensor tetangga single hop dalam bentuk terdistribusi dapat menggunakan MoM.
Sensor j memelihara estimasi lokal antara solusi ZF sj(k) dan semua pengali
{
v
ji}
i
N
j'
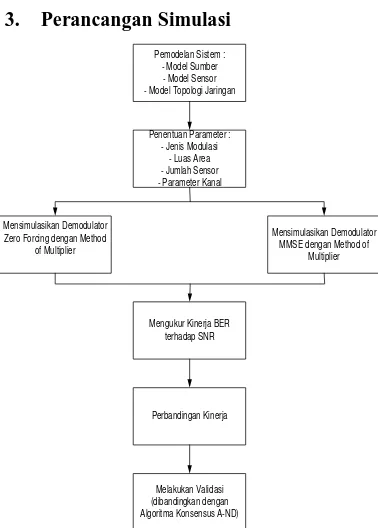
3. Perancangan Simulasi
Pemodelan Sistem : - Model Sumber - Model Sensor - Model Topologi Jaringan
Penentuan Parameter : - Jenis Modulasi
- Luas Area - Jumlah Sensor - Parameter Kanal
Mensimulasikan Demodulator MMSE dengan Method of
Multiplier Mensimulasikan Demodulator
Zero Forcing dengan Method of Multiplier
Mengukur Kinerja BER terhadap SNR
Perbandingan Kinerja
Melakukan Validasi (dibandingkan dengan Algoritma Konsensus A-ND)
Gambar 3. Langkah-langkah Penelitian
Pada penelitian ini dilakukan simulasi untuk demodulasi berdasarkan konsensus terdistribusi dengan algoritma Method Of Multiplier (MoM) pada jaringan sensor nirkabel menggunakan dua demodulator linier yaitu:
1. Zero Forcing
2. Minimum Mean Squared Error
Tahap pertama menentukan model dari sistem, tahap kedua menentukan parameter sistem yang digunakan, tahap ketiga membuat simulasi dengan menggunakan software Matlab. Tahap keempat analisa kinerja dari sistem.
Pada simulasi ini, luas area yang digunakan adalah 50m x 50m dengan node sebanyak 2 buah yang disebar menggunakan distribusi uniform. Parameter lain yang digunakan adalah range komunikasi node sensor sebesar r = 0,5 dan kedua node dihubungkan dengan jarak Euclidean kurang dari r. Simbol berasal dari sinyal yang dimodulasi BPSK dan dipetakan langsung ke matrik S dimana AP memiliki antena M=1.
4. Analisa dan Diskusi
4.1 Penyebaran Sensor
Pada bagian ini akan dibahas data konektifitas antar node sensor aktif yang sangat penting sekali karena digunakan untuk mencari node sensor tetangga. Data konektifitas ini digunakan untuk mencari nilai laplacian matrik L. Parameter yang digunakan pada simulasi ini adalah range
komunikasi node sensor. Range komunikasi node sensor yang digunakan adalah 0.25 m.
Karena range komunikasi node sensor yang digunakan adalah 0.25 m mengakibatkan semua node sensor aktif dapat berkomunikasi dengan node sensor aktif yang lainnya dengan kata lain tidak terdpat subcluster. Konektivitas dari node sensor aktif berupa matrik adjency pada iterasi ke-0 (A(0)) dan degree dari node sensor aktif berupa matrik diagonal pada iterasi ke-0 (D(0)) dari degree semua node sensor aktif.
Gambar 4. Simulasi Penyebaran Sensor
Besarnya nilai matrik Laplacian pada iterasi ke-0 dari hasil simulasi dapat dilihat pada tabel 1. Nilai matrik Laplacian ini selalu berubah-ubah pada setiap iterasinya.
Tabel 4.1 Konektivitas Node Sensor Aktif pada Iterasi ke-0
Node ke 1 2
1 0 1
2 1 0
Tabel 4.2 Degree dari Node Sensor Aktif pada Iterasi ke-0
Node ke 1 2
1 1 0
2 0 1
Tabel 4.3 Laplacian Matrik Node Sensor Aktif pada Iterasi ke-0
Node ke 1 2
1 1 -1
2 -1 1
Hal itu disebabkan oleh nilai konektifitas A setiap node sensor yang aktif berubah-ubah pada setiap iterasinya karena terdapat pengaruh adanya probabilitas kegagalan link pada jaringan sensor nirkabel.
4.2 Zero Forcing dan MMSE dengan Algoritma Konsensus MoM
berdasarkan konsensus terdistribusi Method of
Multiplier menggunakan demodulator linier Zero
Forcing jika sinyal informasi dimodulasi BPSK
dan QPSK.
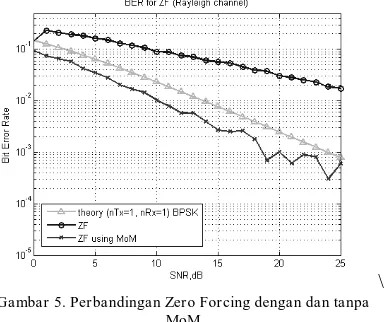
Simbol berasal dari konstelasi BPSK dengan 1 simbol terdiri dari 1 bit dan dipetakan langsung ke matrik S dimana AP memiliki antena M=1. Kemudian dikirimkan ke sensor melalui kanal Rayleigh. Pada sisi penerima sinyal yang diterima tiap sensor akan diekualisasi dengan Zero
Forcing untuk menghilangkan ISI. Kemudian
akan dibandingkan hasilnya dengan demodulasi linier menggunakan algoritma konsensus terdistribusi MoM dimana data yang diperoleh oleh setiap sensor akan diperbaharui setiap waktu oleh sensor tetangganya. Hasil pendeteksian tersebut akan diberikan kepada sensor tetangganya kemudian dilakukan penggabungan sehingga diperoleh hasil deteksi yang optimal dari informasi yang ada.
\ Gambar 5. Perbandingan Zero Forcing dengan dan tanpa
MoM
Penerapan demodulasi linier Zero Forcing
berdasarkan konsensus terdistribusi dengan algoritma Method of Multiplier untuk sinyal informasi yang dikirim dengan modulasi BPSK terlihat memiliki kinerja yang lebih baik dibandingkan dengan Zero Forcing tanpa konsesus. Pada SNR 20 dB, terlihat ZF yang menggunakan MoM memiliki Bit Error Rate 10-3. Hal ini dikarenakan ada pembaharuan data oleh setiap sensor sehingga tercapai hasil deteksi yang paling optimal.
Gambar 6. Perbandingan MMSE dengan dan tanpa MoM
Penerapan demodulasi linier MMSE berdasarkan konsensus terdistribusi dengan algoritma Method of Multiplier untuk sinyal informasi yang dikirim dengan modulasi BPSK terlihat memiliki kinerja yang baik. Pada SNR 18 dB, terlihat MMSE yang menggunakan MoM memiliki Bit Error Rate 10-3. Hal ini dikarenakan ada pembaharuan data oleh setiap sensor sehingga tercapai hasil deteksi yang paling optimal.
Untuk melihat kinerja demodulasi berdasarkan konsensus terdistribusi dengan MoM jika modulasi diganti menjadi lebih tinggi konstelasinya dapat dilihat sebagai berikut :
Gambar 7. Perbandingan ZF dengan MoM antara BPSK dan QPSK
Pada grafik tersebut terlihat kinerja ZF dengan MoM untuk sinyal informasi yang dimodulasi BPSK lebih baik daripada QPSK. Hal ini karena konstelasi BPSK yang lebih sederhana yaitu antipodal.
4.3 Validasi dengan Algoritma konsensus A-ND
Algoritma konsensus selain Method of
Multiplier adalah Average - Network Delay
karena tidak ada kegagalan link antar sensor. Sehingga data lebih cepat mencapai konvergen.
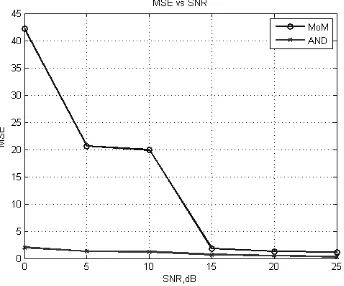
Gambar 8. Perbandingan ZF Terdistribusi anatar MoM dan A-ND
MSE merupakan rata-rata kesalahan kuadrat dari data seluruh node pada proses pentransmisian data. Nilai SNR yang digunakan pada simulasi ini adalah 0 dB, 5 dB, 10 dB, 15 dB, 20 dB, dan 25 dB. Selain dari parameter SNR, parameter yang digunakan dalam simulasi ini sama dengan parameter yang digunakan pada simulasi algoritma A-ND menggunakan bobot
dengan probabilitas kegagalan link sebesar 0.4 . Hasil simulasi perhitungan MSE dapat dilihat pada gambar 9.
Berdasarkan Gambar 9 nilai MSE yang paling besar terletak pada SNR 0 dB sedangkan nilai MSE yang paling kecil terletak pada nilai SNR 25 dB. Semakin kecil nilai SNR maka semakin besar pula noisenya sehingga menyebabkan selisih nilai data akhir pada algoritma A-ND dan MoM terhadap rata-rata data penyensingan awal semua sensor aktif menjadi besar akibatnya nilai MSE yang dihasilkan juga besar.
Dapat dilihat juga bahwa nilai MSE pada algoritma MoM lebih besar dari pada nilai MSE pada algoritma A-ND. Karena pada demodulasi menggunakan konsensus terdistribusi juga menerapkan ZF yang merupakan solusi sub-optimal untuk mengkompensasi kanal.
Gambar 9. Pengaruh Nilai SNR terhadap MSE
5. Kesimpulan
1. Penerapan demodulasi linier Zero Forcing
dan MMSE berdasarkan konsensus terdistribusi dengan algoritma Method of
Multiplier untuk sinyal informasi yang
dikirim dengan modulasi BPSK terlihat memiliki kinerja yang lebih baik dibandingkan dengan Zero Forcing dan MMSE tanpa konsesus.
2. Kinerja MMSE lebih baik daripada ZF karena MMSE tidak hanya mengkompensasi kanal saja tetapi juga mengkompensasi noise.
3. Kinerja ZF dan MMSE dengan MoM untuk sinyal informasi yang dimodulasi BPSK lebih baik daripada QPSK.
4. Semakin besar nilai SNR mengakibatkan kualitas data menjadi lebih bagus sehingga selisih hasil data yang konvergen dengan data rata-rata awal penyensingan sensor aktif menjadi kecil akibatnya nilai MSE yang dihasilkan menjadi kecil pula.
6. Pustaka
Akyldiz, I.F, Sankarasubramaniam, Y, dan Cayirci, E (2002). A Survey on Sensor Network. IEEE Commun Mag, hal. 102-114. J.G. Proakis (2001). Digital Communications, 4th
edition, New Jersey : McGraw-Hill.
Jayati, A.E, Wirawan (2011). Demodulasi Terdistribusi pada Jaringan Sensor Nirkabel.
Proceedings of Indonesian Student
Conference on Satellite ISCOS.
Jayati, A.E, Wirawan (2012). Studi Penerapan Demodulasi Linier Menggunakan ZeroForcing dan MMSE pada Jaringan Sensor Nirkabel. Proceeding of EECCIS. Kumar, N. S; Kumar, K.R.S (2011). Bit error
Rate Performance Analysis of ZF, ML, and MMSE Equalizer for MIMO Wireless Communication Receiver. European
Journal of Scientific Research, Vol. 59, No.
4, pp 522-532.
Zhu, H; Cano, A; Giannakis, G.A (2008). Distributed Demodulation using Consensus Averaging in Wireless Sensor Networks.
Signal and Computers, 42’nd Asilomar
Conference on Signals, Sys and Comp.
Zhu, H; Cano, A; Giannakis, G.A (2009). Distributed in Network Channel Decoding.
IEEE Trans. On Signal Processing, vol. 57,
pp 3970-3983.
Zhu, H; Cano, A; Giannakis, G.A (2010). Distributed Consensus-Based Demodulation : Algorithm and Error Analysis. IEEE
Transactions on Wireless Communications,