BAB 2
LANDASAN TEORI
2.1 Interval
Interval adalah himpunan bilangan real yang berada di antara dua bilangan tertentu sebagai batas
Sifat-sifat Interval :
Jika 𝐴 = 𝑎 ,𝑎 dan 𝐵= 𝑏 ,𝑏 dengan 0 B, maka:
- 𝐴+𝐵= 𝑎+𝑏 ,𝑎+𝑏 (Penjumlahan)
- 𝐴 − 𝐵= 𝑎 − 𝑏 ,𝑎 − 𝑏 (Pengurangan)
- 𝐴 ∗ 𝐵 = min 𝑎𝑏 ,𝑎𝑏 ,𝑎𝑏 ,𝑎𝑏 ,𝑚𝑎𝑘𝑠{ 𝑎𝑏 ,𝑎𝑏 ,𝑎𝑏 ,𝑎𝑏 } (Perkalian)
- 𝐴/𝐵= 𝑎 ,𝑎 ∗[1𝑏,𝑏1] (Pembagian)
Jika 0∈ 𝐵, maka A / B tidak terdefinisi.
Jika A, B, dan C∈ 𝐼( ) maka:
- 𝐴+𝐵= 𝐵+𝐴,𝐴 ∗ 𝐵= 𝐵 ∗ 𝐴 (Komutatif)
- 𝐴+𝐵 +𝐶= 𝐴+ 𝐵+𝐶 , 𝐴 ∗ 𝐵 ∗ 𝐶= 𝐴 ∗(𝐵 ∗ 𝐶) (Assosiatif)
- 0,0 𝑑𝑎𝑛 1,1 , adalah elemen netral pada sifat penjumlahan dan pembagian
- Interval bilangan Riil tidak memiliki pembagi 0
- Bilangan Riil𝐴= 𝑎,𝑎 , 𝑎 ≠ 𝑎tidak memiliki invers pada sifat penjumlahan dan perkalian, namun,0∈ 𝐴 − 𝐴 𝑑𝑎𝑛 1∈(𝐴/𝐴)\
- 𝐴 ∗ 𝐵+𝐶 𝐴 ∗ 𝐵+𝐴 ∗ 𝐶 (Subdistributif)
- 𝑎 𝐵+𝐶 =𝑎𝐵+𝑎𝐶,𝑎 ∈ 𝑅
2.2 Linear Programming Interval Coefficient (LPIC)
Pada beberapa masalah aplikasi pemrograman linier (PL), koefisien pada model seringkali tidak bisa ditentukan secara tepat. Salah satu metode dalam menyelesaikan masalah PL ini adalah dengan menggunakan pendekatan interval, dimana koefisien tak tentu tersebut diubah menjadi bentuk interval. Bentuk PL ini dinamakan Linear Programming with Interval Coefficient (LPIC). Koefisien berbentuk interval menandakan perluasan toleransi (atau daerah) dimana parameter konstanta bisa diterima dan memenuhi model LPIC.
Bentuk linier dari persamaan LPIC adalah :
Maksimum Z=
n
j 1
[𝑐𝑗,𝑐𝑗]𝑥𝑗
Kendala
n
j 1
[𝑎𝑗,𝑎𝑗]𝑥𝑗 ≥[𝑏𝑗,𝑏𝑗]
Maka Best Optimum dan Worst Optimum Best Optimum
Maksimum 𝑍=
n
j 1
𝑐𝑗𝑥𝑗
Kendala
n
j 1
𝑎𝑗𝑥𝑗 ≥ 𝑏𝑗
𝑥1 ≥0,…,𝑥𝑗 ≥0
Worst Optimum
Maksimum 𝑍=
n
j 1
𝑐𝑗𝑥𝑗
Kendala
n
j 1
𝑎𝑗𝑥𝑗 ≥ 𝑏𝑗
𝑥1 ≥0,…,𝑥𝑗 ≥0
2.3 Program Linier Pecahan (PLP)
Bidang dari Program Linier Pecahan (PLP) secara luas dikembangkan oleh seorang matematisi Hungaria B.Martos dan asosiasinya di tahun 1960an dengan memusatkan pada masalah optimisasi. Beberapa metode penyelesaian masalah ini Charnes dan Cooper (1962) telah menyarankan metode mereka dengan bergantung pada transformasi ini (PLP) kepada ekivalen program linier. Bentuk umum dari masalah PLP dapat dibuat sbb :
Maksimumkan Z = 𝑐𝑇𝑥+𝛼
𝑑𝑇𝑥+𝛽
Kendala 𝐴𝑥 ≤ 𝑏
0
x
dimana 𝑥 ∈ 𝑅𝑛, x merupakan vektor dari variabel keputusan, 𝑐,𝑑 ∈ 𝑅𝑛
dan b adalah koefisien vektor yang diketahui, 𝐴 ∈ 𝑅𝑚𝑥𝑛 adalah matriks yang diketahui dan 𝛼,𝛽 ∈ 𝑅𝑛 adalah konstanta. Kendala permasalahan dibatasi wilayah
feasible 𝑥|𝑑𝑇𝑥+𝛽> 0 , yaitu wilayah yang penyebut adalah positif. Atau, penyebut dari fungsi tujuan harus negatif di daerah feasible secara keseluruhan. (Charnes & Cooper ,1962)
2.3 Program linier Optimasi.
Program Linier.
Program linier merupakan model umum yang dapat digunakan dalam pemecahan masalah pengalokasian sumber-sumber yang terbatas secara optimal. Masalah tersebut timbul apabila seseorang diharuskan untuk memilih atau menentukan tingkat setiap kegiatan yang akan dilakukannya, di mana masing-masing kegiatan membutuhkan sumber yang sama sedangkan jumlahnya terbatas. Secara sederhana, dapat diambil contoh bagian produksi suatu perusahaan yang dihadapkan pada masalah penentuan tingkat produksi masing-masing jenis produk dengan memperhatikan batasan faktor-faktor produksi: mesin, tenaga kerja, bahan mentah, dan sebagainya untuk memperoleh tingkat keuntungan maksimal atau biaya yang minimal.
Pada masa modern sekarang, program linier masih menjadi pilihan dalam upaya untuk memperoleh tingkat keuntungan maksimal atau biaya yang minimal. Dalam memecahkan masalah di atas, Program linier menggunakan model matematis. Sebutan “linier” berarti bahwa semua fungsi matematis yang disajikan dalam model ini haruslah fungsi-fungsi linier. Dalam Program linier dikenal dua macam fungsi, yaitu fungsi tujuan (objective function) dan fungsi-fungsi batasan (constraint function). Fungsi tujuan adalah fungsi yang menggambarkan tujuan/sasaran di dalam permasalahan program linier yang berkaitan dengan pengaturan secara optimal sumber daya-sumber daya, untuk memperoleh keuntungan maksimal atau biaya minimal. Pada umumnya nilai yang akan dioptimalkan dinyatakan sebagai Z. Fungsi batasan merupakan bentuk penyajian secara matematis batasan-batasan kapasitas yang tersedia yang akan dialokasikan secara optimal ke berbagai kegiatan.
1. Tujuan
Apa yang menjadi tujuan permasalahan yang dihadapi yang ingin dipecahkan dan dicari jalan keluarnya. Tujuan ini harus jelas dan tegas yang disebut fungsi tujuan.
2. Alternatif perbandingan
Harus ada sesuatu atau berbagai alternatif yang ingin diperbandingkan; misalnya antara kombinasi waktu tercepat dan biaya tertinggi dengan waktu terlambat dan biaya terendah.
3. Sumber daya
Sumber daya yang dianalisis harus berada dalam keadaan yang terbatas
4. Perumusan kuantitatif
Fungsi tujuan dan kendala harus dapat dirumuskan secara kuantitatif dalam apa yang disebut model matematika.
5. Keterkaitan peubah
Peubah-peubah yang membentuk fungsi tujuan dan kendala tersebut harus memiliki hubungan fungsional atau hubungan keterkaitan.
Model Dasar
Model dasar program linier dapat dirumuskan sebagai berikut:
Carilah nilai-nilai x1,x2, ,xj yang dapat menghasilkan berbagai
)
Dengan syarat bahwa fungsi tujuan tersebut memenuhi kendala-kendala atau syarat-syarat ikatan sebagai berikut:
1
c Parameter yang dijadikan kriteria optimisasi, atau koefisien peubah
pengambilan keputusan dalam fungsi tujuan.
j
x Peubah pengambilan keputusan atau kegiatan (yang ingin dicari;
yang tidak diketahui).
ij
a Koefisien teknologi peubah pengambilan keputusan (kegiatan yang
bersangkutan) dalam kendala ke-i.
Asumsi – asumsi program linier 1. Linieritas
Asumsi ini menginginkan agar perbandingan antara input yang satu dengan input lainnya, atau untuk suatu input dengan output besarnya tetap dan terlepas (tidak tergantung) pada tingkat produksi.
2. Proposionalitas
Asumsi ini menyatakan bahwa jika peubah pengambilan keputusan, xj
berubah maka dampak perubahannya akan menyebar dalm proposi yang sama terhadap fungsi tujuan, cjxj, dan juga pada kendalanya, aijxj.
3. Aditivitas
Asumsi ini menyatakan bahwa nilai parameter suatu kriteria optimisasi (koefisien peubah pengambilan keputusan dalam fungsi tujuan) merupakan jumlah dari nilai individu-individu c j dalam model PL tersebut.
4. Divisibilitas
Asumsi ini menyatakan bahwa peubah-peubah pengambilan keputusan
j
X , jika diperlukan dapat dibagi ke dalam pecahan-pecahan.
5. Deterministik
Asumsi ini menghendaki agar semua parameter dalam PL (yaitu nilai – nilai cj, aij , dan bi) tetap dan dikehendaki atau ditentukan secara pasti.
Metode Simpleks
lagi, sehingga diperlukan metode simpleks. Metode ini lazim dipakai untuk menentukan kombinasi dari tiga variabel atau lebih.
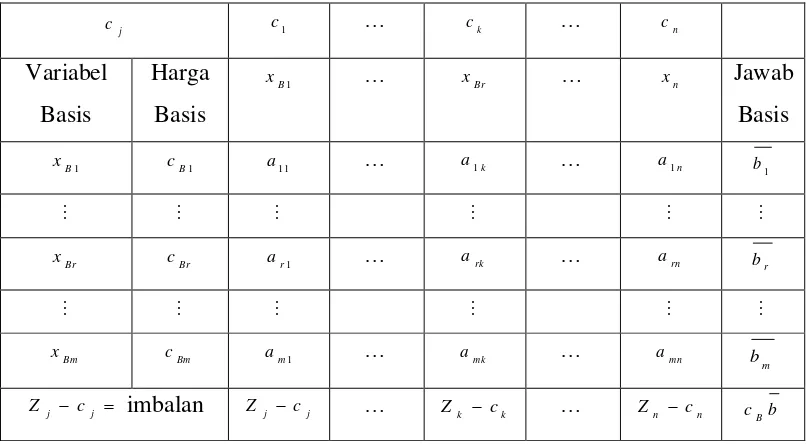
Masalah Program linier yang melibatkan banyak variabel keputusan dapat dengan cepat dipecahkan dengan bantuan komputer. Bila variabel keputusan yang dikandung tidak terlalu banyak, masalah tersebut dapat diselesaikan dengan suatu algoritma yang biasanya sering disebut metode tabel simpleks. Disebut demikian karena kombinasi variabel keputusan yang optimal dicari dengan menggunakan tabel-tabel.
Tabel 2.1 Bentuk tabel simpleks
j
c c1 ck cn
Variabel Basis
Harga Basis
1 B
x xBr xn Jawab
Basis
1 B
x cB1 a11 a1k a1n
1 b
Br
x cBr ar1 ark arn
r
b
Bm
x cBm am1 amk amn
m
b
j
j c
Z imbalan Z j cj Zk ck Zn cn c b
B
Sebelum menyelesaikan suatu tabel simpleks terlebih dahulu menginisialisasikan dan merumuskan suatu persoalan keputusan kedalam model matematik persamaan linier, caranya sebagai berikut:
1. Konversikan semua ketidaksamaan menjadi persamaan.
Agar persamaan garis batasan memenuhi persyaratan penyelesaian pada daerah kelayakan (feasible) maka model program linier diubah menjadi suatu model yang sama dengan menambahkan variabel slack, surplus dan variabel buatan (artificial
variabel) pada tiap batasan (constraint) serta memberi harga nol kepada setiap koefisien C nya. Batasan dapat di modifikasi sebagai berikut:
a. Untuk batasan bernotasi dapat dimodifikasikan kepada bentuk persamaan dengan menambahkan variabel slack ke dalam nya.
b. Untuk batasan bernotasi atau diselesaikan dengan menambahkan variabel surplus dan variabel buatan. Dengan penambahan variabel buatan ini akan merusak sistem batasan, hal ini dapat diatasi dengan membuat suatu bilangan besar M sebagai harga dari variabel buatan tersebut dalam fungsi tujuan. Jika persoalan maksimal maka dibuat –M sebagai harga, dan jika persoalan minimal dibuat +M sebagai harga dari variabel buatan. Cara pendekatan ini dikenal dengan metode M besar (Big M method).
Penambahan variabel slack dan variabel buatan (artificial variabel) pada tiap batasan (constrain) untuk persoalan maksimal dapat dirumuskan sebagai berikut:
n j
xj 0, 1, , ; xi bi,i 1,,m ; Bi bi,i m1 1,,m
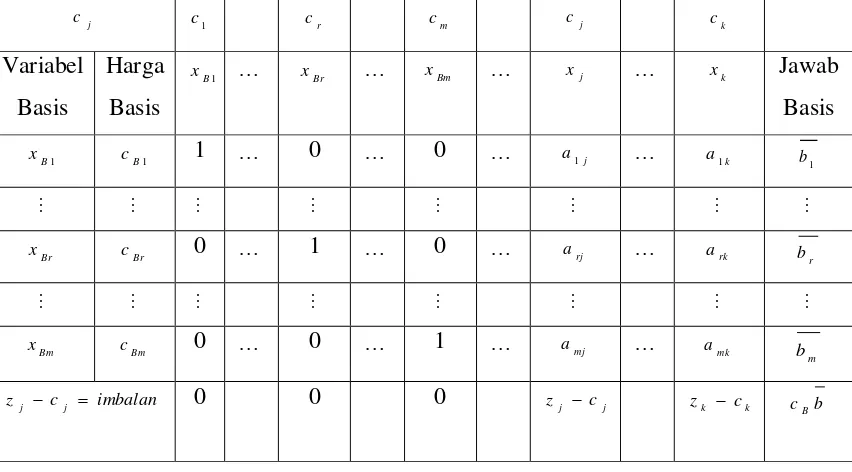
2. Menyusun persamaan – persamaan di dalam tabel awal simpleks.
Tabel 2.2 Bentuk tabel awal simpleks sebelum pivoting
j
c c1 cr cm cj ck
Variabel Basis
Harga Basis
1 B
x xBr xBm xj xk Jawab
Basis
1 B
x cB1 1 0 0 a1j a1k
1 b
Br
x cBr 0 1 0 arj ark
r
b
Bm
x cBm 0 0 1 amj amk
m
b
imbalan c
zj j 0 0 0 zj cj zk ck cBb
Langkah – langkah yang digunakan untuk menyelesaikan suatu tabel simpleks adalah sebagai berikut:
Langkah 1 : Mengecek nilai optimal imbalan.
Untuk persoalan maksimal : zk ck = minimal {zj cj : j R}.
Jika zk ck 0 maka selesai, berarti jawab atau solusi sudah optimal.
Untuk persoalan minimal : zk ck = maksimal {zj cj : j R}.
Jika zk ck 0 maka selesai, berarti jawab atau solusi sudah optimal.
j
a Koefisien dari semua variabel dalam sistem batasan.
Bi
c Harga dari variabel.
Langkah 2 : Menentukan variabel yang akan masuk dalam basis.
Untuk persoalan maksimal jika terdapat beberapa zj cj 0 maka kolom yang menjadi kolom pivot adalah kolom dengan zj cj terkecil, dan
variabel yang sehubungan dengan kolom pivot adalah variabel yang masuk kedalam basis. Untuk persoalan minimal jika terdapat beberapa zj cj 0 maka kolom yang menjadi kolom pivot adalah kolom dengan zj cj terbesar, dan
variabel yang sehubungan dengan kolom pivot adalah variabel yang masuk ke dalam basis.
Langkah 3 : Menentukan variabel yang akan keluar dari basis.
Menetapkan variabel yang keluar dari basis yaitu :
pivot yang demikian adalah variabel yang keluar dari basis.
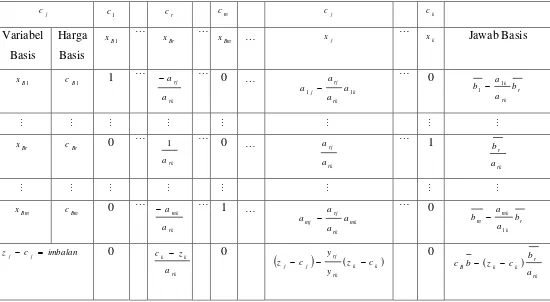
Langkah 4 : Menyusun tabel simpleks baru.
elemen pivot, Koefisien – koefisien baris pivot baru dapat dicari dengan menggunakan rumus sebagai berikut :
rk rj
a a
(2.9)
Untuk menghitung nilai baris baru lainnya dilakukan dengan menggunakan rumus sebagai berikut :
Langkah 5 : Mengecek nilai optimal imbalan dari tabel simpleks yang baru. Jika imbalan sudah optimal maka tafsirkan hasil penyelesaian, jika belum optimal maka kembali kepada langkah 2.
Tabel 2.3 Bentuk tabel simpleks sesudah pivoting