LAPORAN PRAKTIKUM
TEKNIK PENGGERAK 2
Disusun oleh
Reza Maliki Akbar
214341097
3 AEA
TEKNIK OTOMASI MANUFAKTUR DAN MEKATRONIKA
POLITEKNIK MANUFAKTUR NEGERI BANDUNG
KATA PENGANTAR
Puji dan syukur penulis panjatkan kepada Allah SWT yang telah memberikan rahmat dan karunia-Nya, sehingga penulis dapat menyelesaikan Laporan Praktikum TPG 2.
Laporan ini merupakan realisasi dari hasil kegiatan perkuliahan berupa praktikum di Laboratorium Teknik Penggerak dan Elektronika Daya yang penulis
lakukan untuk melaksanakan kewajiban sebagai Mahasiswa kepada dosen mata kuliah TPG.
Dalam penulisan laporan ini penulis banyak mendapatkan pengalaman dan ilmu. Berkat panduan, bimbingan, juga dorongan baik secara langsung dari berbagai pihak secara langsung maupun tidak langsung dari berbagai pihak yang membantu pengerjaan serta penyelasaian laporan ini. Maka melalui kesempatan yang sangat berharga ini saya menyampaikan ucapan terima kasih yang sebesar-besarnya kepada semua pihak yang telah membantu dalam pelaksanaan praktikum dan proses penyelesaian laporan ini, terutama kepada:
1. Kedua orangtua, yang telah mendukung, baik dukungan moril dan materil, 2. Dr. Noval Liliansa, Dipl.Ing (FH)., M.T., selaku dosen mata kuliah Teknik
Penggerak,
3. Rekan-rekan kelas 3AEA.
Mohon maaf apabila dalam laporan ini masih terdapat banyak kekurangan. Penulis masih banyak memiliki kekurangan dan kesalahan dalam penulisan ataupun penyusunan laporan. Untuk itu, penulis mengharapkan saran dan kritik untuk lebih
menyempurnakan laporan ini dan menjadi bahan pertimbangan penulisan dan penyusunan laporan yang selanjutnya.
April 2016
CATATAN MINGGUAN PRAKTIK
POLITEKNIK MANUFAKTUR NEGERI BANDUNG
CATATAN MINGGUAN PRAKTIK
AE
PROGRAM : Teknik Penggerak 2
MINGGU KE : 11
HARI/TGL KEGIATAN WAKTU
Senin, 18 April 2016 Baris, absensi, berdoa 06.55-07.05
Pembagian kelompok
Membuat program PSpice untuk “ torsi-speed characteristic of induction motor”
07.05-09.00
Istirahat 09.00-09.15
Melanjutkan kegiatan sebelumnya 09.15-11.40
Istirahat, shalat, pembelian komponen dan
makan
11.40-12.40
Membuat program PSpice untuk “ torsi-speed characteristic with variable rotor
resistance”
12.40-15.00
Bersih – bersih, baris,absensi dan berdoa 15.00-15.20
Selasa,
19 April 2016
Baris, absensi,berdoa 06.55-07.05
Mengerjakan Problem Set 15-3 07.05-09.00
Istirahat 09.00-09.15
Melanjutkan kegiatan sebelumnya 09.15-11.40
Istirahat, shalat, dan makan 11.40-12.40
Mengerjakan Problem Set 15-4 12.40-15.00 Bersih – bersih, baris,absensi dan berdoa
15.00-15.20
Istirahat 09.00-09.15 Praktikum Penggerak Motor Induksi SPWM 09.15-11.40 Istirahat, shalat, dan makan 11.40-12.40 Praktikum Penggerak Motor Induksi SPWM 12.40-15.00 Bersih – bersih, baris, absensi,dan berdoa 15.00-15.20 Kamis, 21 April 2016 Baris, absensi,berdoa 06.55-07.05
Praktikum Penggerak Motor Induksi
Menggunakan VFD (Pengganti KBVF) 07.05-09.00 Istirahat 09.00-09.15 Praktikum Penggerak Motor Induksi
Menggunakan VFD (Pengganti KBVF) 09.15-11.40 Istirahat, shalat, dan makan 11.40-12.40 Praktikum Penggerak Motor Induksi
Pengganti KBVF 12.40-15.00 Bersih – bersih, baris, absensi,dan berdoa 15.00-15.20
Jum’at, 22 April 2016 Baris, absensi,berdoa 06.55-07.05
Praktikum Penggerak Motor Induksi
Menggunakan VFD (Pengganti KBVF) 07.05-09.00 Istirahat 09.00-09.15 Melakukan analisa 09.15-10.50
Istirahat, jum’atan 10.50-13.20
DAFTAR ISI
1.5 Sistematika Penulisan ... 3
BAB II LANDASAN TEORI ... 4
2.1 Motor Listrik ... 4
2.1.1 Prinsip Kerja Motor Listrik... 4
2.1.2 Jenis-Jenis Motor Listrik ... 5
2.1.3 Motor Inverter (Variable Frequency Drive) ... 9
2.2 OrCAD PSpice ... 10
2.2.1 Nodes ... 11
2.2.2 Satuan dan Skala ... 11
2.2.3 Sumber ... 12
2.2.3.1. Independent Sources ... 12
2.2.3.1.1 Independent DC Sources ... 12
2.2.3.1.2 Independent AC Sources... 12
2.2.3.2. Dependent Sources ... 13
2.2.3.3. Bentuk-bentuk independent sources... 13
2.2.3.3.1 Sinusoidal... 13
2.2.3.3.2 PWL (Piece-Wise Linear) ... 14
2.2.3.3.3 Pulse ... 14
2.2.4 Semiconductor Devices ... 15
2.2.7.2 Kapasitor dan Induktor ... 17
BAB III LAPORAN PRAKTIKUM ... 18
3.1 Program PSpice... 18
3.1.1 Karakteristik Kecepatan-Torsi Motor Induksi ... 18
3.1.2 Karakteristik Kecepatan-Torsi Motor Induksi dengan Tahanan Variabel pada Rotor ... 20
3.2 Penggerak Motor Induksi SPWM ... 21
3.2.1 Tujuan ... 21
3.2.2 Percobaan ... 22
3.2.3 Prosedur Percobaan... 23
3.3 Penggerak Motor Induksi Menggunakan Variable Frequency Drive (Pengganti KBVF) ... 35
3.3.1 Tujuan ... 35
3.3.2 Percobaan ... 35
3.3.3 Prosedur percobaan ... 36
BAB IV PENUTUP ... 44
4.1. Kesimpulan ... 44
4.2. Saran ... 44
BAB I PENDAHULUAN
1.1Latar Belakang
Pengendalian daya elektrik dari sebuah sistem penggerak seperti motor listrik dibutuhkan oleh suatu industri agar mendapatkan tegangan yang bervariabel. Perkembangan teknologi yang selalu meningkat akan pula meningkatkan cara-cara untuk mendapatkan suatu pengendalian tesebut. Pengendalian daya sekarang ini dapat menggunakan komponen-komponen elektronika dengan tujuan untuk konversi energi listrik, penggunaan, maupun pemutusan energi listrik.
Pada zaman dahulu kala semua peralatan bergerak (contohnya adalah kereta listrik) masih menggunakan DC drives (motor listrik dengan sumber DC). Salah satu kelemahan dari DC drive adalah pemakaian sikat arang dan cincin belah
(commutator) sebagai penghubung aliran arus dari terminal motor listrik ke koilnya.
Cincin belah (commutator) dan sikat arang pada motor DC berfungsi sebagai pencacah arus searah (DC) agar koil motor menjadi kutub medan magnet yang berlawanan sehingga motor dapat berputar. Kedua piranti tersebut akan saling bergesekan pada saat motor berputar sehingga mengakibatkan sering ausnya sikat arang (yang terbuat dari batangan karbon murni). Penggantian sikat arang (brush) dari motor DC seolah-olah menjadi sebuah kebutuhan yang harus dilakukan dalam jangka waktu tertentu. Berbeda halnya dengan motor AC (AC drive), peralatan penggerak ini tidak menggunakan sikat arang karena sumber aliran listrik adalah bolak-balik (alternating current).
Ada kelemahan tentunya ada pula kelebihanya, meskipun DC drive merepotkan dari segi maintenance namun peralatan penggerak ini mudah dikendalikan kecepatanya dengan menggunakan sistem eksitasi tegangan pada belitan stator motor. Selain itu di dalam motor DC itu sendiri bisa dipasang DC
coupling sebagai metode perlambatan (DC break) motor. Sedangkan untuk AC
1.2Rumusan Masalah
Berdasarkan dari uraian pada latar belakang dapat dirumuskan permasalahan sebagai berikut:
1. Konsep dan cara kerja penggerak motor induksi tiga fasa menggunakan
SPWM.
2. Konsep dan cara kerja penggerak motor menggunakan Variabel
Frequency Drive.
1.3Batasan Masalah
Berikut adalah batasan masalah yang akan dibahas pada laporan berikut: 1. Praktikum yang dilakukan berupa simulasi menggunakan program
OrCAD PSpice dan menggunakan trainer kit penggerak motor induksi.
2. Analisis per rangkaian yang telah disimulasikan pada program OrCAD
PSpice dan analisis pada rangkaian trainer kit penggerak motor induksi.
1.4Tujuan
1.4.1 Tujuan Subjektif
Sebagai salah satu syarat untuk menyelesaikan program praktikum Teknik Penggerak di Jurusan Teknik Otomasi Manufaktur dan Mekatronika.
1.4.2 Tujuan Objektif
1. Mahasiswa dapat mengetahui dan menggunakan Program PSpice sebagai
simulasi dari rangkaian
2. Mahasiswa dapat menganalisa dan memahami gelombang yang dihasilkan
dari rangkaian
3. Mahasiswa dapat mengetahui fungsi dan karakteristik dari setiap
komponen elektonika juga motor pada rangkaian
1.5Sistematika Penulisan
Untuk memudahkan pembahasaan, laporan praktikum TPG 2 ini dibagi menjadi beberapa bab sebagai berikut:
BAB I : PENDAHULUAN
Membahas latar belakang, rumusan masalah, batasan masalah, tujuan dan sistematika penulisan.
BAB II : LANDASAN TEORI
Membahas landasan teori tentang motor listrik, inverter dan PSpice.
BAB III : LAPORAN PRAKTIKUM
Membahas langkah kerja praktikum, konsep & cara kerja daripada penggerak motor listrik yang terdiri dari beberapa macam rangkaian.
BAB VI : PENUTUP
BAB II
LANDASAN TEORI
2.1Motor Listrik
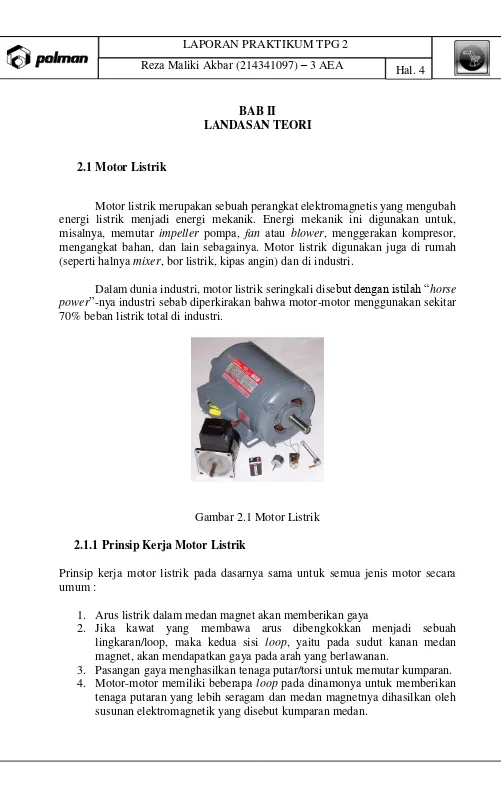
Motor listrik merupakan sebuah perangkat elektromagnetis yang mengubah energi listrik menjadi energi mekanik. Energi mekanik ini digunakan untuk, misalnya, memutar impeller pompa, fan atau blower, menggerakan kompresor, mengangkat bahan, dan lain sebagainya. Motor listrik digunakan juga di rumah (seperti halnya mixer, bor listrik, kipas angin) dan di industri.
Dalam dunia industri, motor listrik seringkali disebut dengan istilah “horse
power”-nya industri sebab diperkirakan bahwa motor-motor menggunakan sekitar
70% beban listrik total di industri.
Gambar 2.1 Motor Listrik
2.1.1 Prinsip Kerja Motor Listrik
Prinsip kerja motor listrik pada dasarnya sama untuk semua jenis motor secara umum :
1. Arus listrik dalam medan magnet akan memberikan gaya
2. Jika kawat yang membawa arus dibengkokkan menjadi sebuah lingkaran/loop, maka kedua sisi loop, yaitu pada sudut kanan medan magnet, akan mendapatkan gaya pada arah yang berlawanan.
3. Pasangan gaya menghasilkan tenaga putar/torsi untuk memutar kumparan. 4. Motor-motor memiliki beberapa loop pada dinamonya untuk memberikan
Dalam memahami sebuah motor, penting untuk mengerti apa yang dimaksud dengan beban motor listrik. Beban mengacu kepada keluaran tenaga putar/torsi sesuai dengan kecepatan yang diperlukan. Beban umumnya dapat dikategorikan kedalam tiga kelompok (BEE India, 2004) :
1. Beban torsi konstan adalah beban dimana permintaan keluaran energinya bervariasi dengan kecepatan operasinya namun torsi nya tidak bervariasi. Contoh beban dengan torsi konstan adalah konveyor, rotari, dan pompa
displacement konstan.
2. Beban dengan variabel torsi adalah beban dengan torsi yang bervariasi dengan kecepatan operasi. Contoh beban dengan variabel torsi adalah pompa sentrifugal dan kipas (torsi bervariasi sebagai kuadrat kecepatan). 3. Beban dengan energi konstan adalah beban dengan permintaan torsi yang
berubah dan berbanding terbalik dengan kecepatan. Contoh untuk beban dengan daya konstan adalah peralatan-peralatan mesin.
2.1.2 Jenis-Jenis Motor Listrik
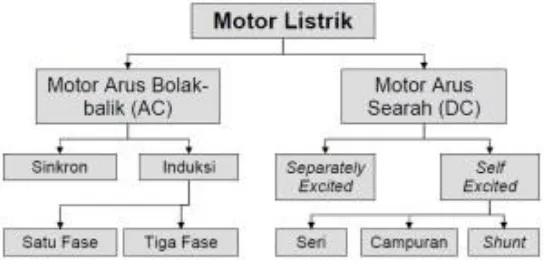
Pada dasarnya motor listrik terbagi menjadi dua jenis yaitu motor listrik DC dan motor listrik AC. Kemudian dari jenis tersebut digolongkan menjadi beberapa klasifikasi lagi sesuai dengan karakteristiknya.
Gambar 2.2 Jenis-jenis motor listrik
1. Motor Arus bolak-balik (AC)
Motor AC adalah jenis motor listrik yang bekerja menggunakan tegangan AC (Alternating Current). Motor AC memiliki dua buah bagian utama yaitu “stator” dan “rotor”. Stator merupakan komponen motor AC yang statis. Rotor merupakan komponen motor AC yang berputar. Motor AC dapat dilengkapi dengan penggerak frekuensi variabel untuk mengendalikan kecepatan sekaligus menurunkan konsumsi dayanya. a. Motor AC Sinkron
pembangkitan daya dan memiliki torque awal yang rendah, dan oleh karena itu motor sinkron cocok untuk penggunaan awal dengan beban rendah, seperti kompresor udara, perubahan frekuensi dan generator motor. Motor sinkron mampu untuk memperbaiki faktor daya sistim, sehingga sering digunakan pada sistim yang menggunakan banyak listrik.
Gambar 2.3 Motor AC Sinkron
Komponen utama motor AC sinkron :
Rotor, Perbedaan utama antara motor sinkron dengan motor induksi
adalah bahwa rotor mesin sinkron berjalan pada kecepatan yang sama dengan perputaran medan magnet. Hal ini memungkinkan sebab medan magnit rotor tidak lagi terinduksi. Rotor memiliki magnet permanen atau arus DC-excited, yang dipaksa untuk mengunci pada posisi tertentu bila dihadapkan dengan medan magnet lainnya.
Stator, Stator menghasilkan medan magnet berputar yang
sebanding dengan frekuensi yang dipasok.
Motor ini berputar pada kecepatan sinkron, yang diberikan oleh persamaan berikut (Parekh, 2003):
Ns = 120 f / P
Dimana:
f = frekuensi dari pasokan frekuensi P = jumlah kutub
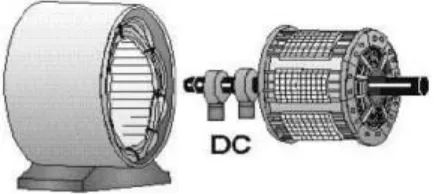
b. Motor AC Induksi
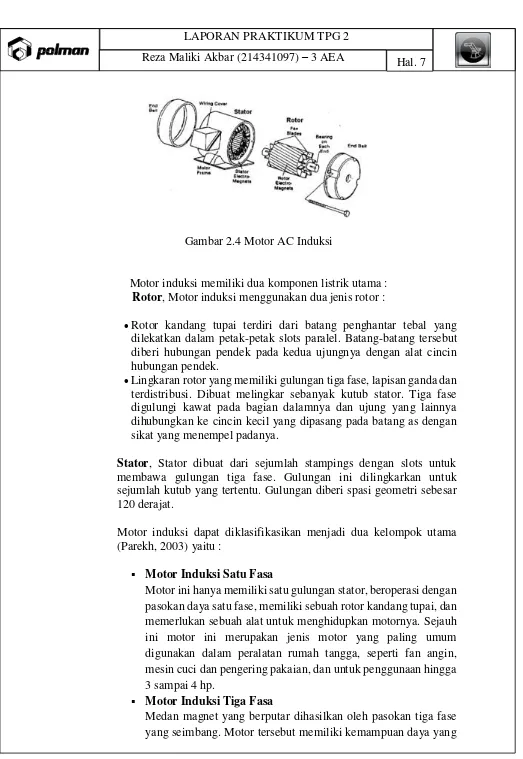
Gambar 2.4 Motor AC Induksi
Motor induksi memiliki dua komponen listrik utama : Rotor, Motor induksi menggunakan dua jenis rotor :
Rotor kandang tupai terdiri dari batang penghantar tebal yang dilekatkan dalam petak-petak slots paralel. Batang-batang tersebut diberi hubungan pendek pada kedua ujungnya dengan alat cincin hubungan pendek.
Lingkaran rotor yang memiliki gulungan tiga fase, lapisan ganda dan terdistribusi. Dibuat melingkar sebanyak kutub stator. Tiga fase digulungi kawat pada bagian dalamnya dan ujung yang lainnya dihubungkan ke cincin kecil yang dipasang pada batang as dengan sikat yang menempel padanya.
Stator, Stator dibuat dari sejumlah stampings dengan slots untuk membawa gulungan tiga fase. Gulungan ini dilingkarkan untuk sejumlah kutub yang tertentu. Gulungan diberi spasi geometri sebesar 120 derajat.
Motor induksi dapat diklasifikasikan menjadi dua kelompok utama (Parekh, 2003) yaitu :
Motor Induksi Satu Fasa
Motor ini hanya memiliki satu gulungan stator, beroperasi dengan pasokan daya satu fase, memiliki sebuah rotor kandang tupai, dan memerlukan sebuah alat untuk menghidupkan motornya. Sejauh ini motor ini merupakan jenis motor yang paling umum digunakan dalam peralatan rumah tangga, seperti fan angin, mesin cuci dan pengering pakaian, dan untuk penggunaan hingga 3 sampai 4 hp.
Motor Induksi Tiga Fasa
tinggi, dapat memiliki kandang tupai atau gulungan rotor (walaupun 90% memiliki rotor kandang bajing); dan penyalaan sendiri. Diperkirakan bahwa sekitar 70% motor di industri menggunakan jenis ini, sebagai contoh, pompa, kompresor, belt conveyor, jaringan listrik , dan grinder. Tersedia dalam ukuran 1/3 hingga ratusan hp.
Kecepatan motor induksi
Motor induksi bekerja sebagai berikut. Listrik dipasok ke stator yang akan menghasilkan medan magnet. Medan magnet ini bergerak dengan kecepatan sinkron disekitar rotor. Arus rotor menghasilkan medan magnet kedua, yang berusaha untuk melawan medan magnet stator, yang menyebabkan rotor berputar.
Walaupun begitu, didalam prakteknya motor tidak pernah bekerja pada kecepatan sinkron namun pada “kecepatan dasar” yang lebih rendah. Terjadinya perbedaan antara dua kecepatan tersebut disebabkan adanya “slip/geseran” yang meningkat dengan meningkatnya beban. Slip hanya terjadi pada motor induksi. Untuk menghindari slip dapat dipasang sebuah cincin geser/ slip ring, dan motor tersebut dinamakan “motor cincin geser/ slip ring motor”.
Persamaan berikut dapat digunakan untuk menghitung persentase slip/geseran (Parekh, 2003):
Dimana:
Ns = kecepatan sinkron dalam RPM
Nb = kecepatan dasar dalam RPM
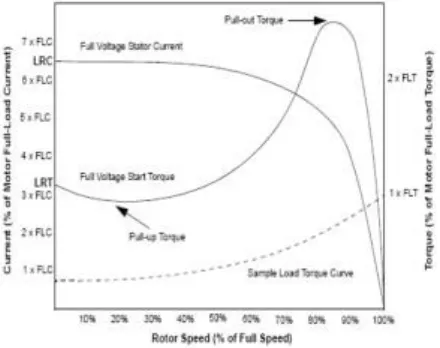
Hubungan Antara Beban, Kecepatan dan Torque Pada Motor AC Induksi
Gambar dibawah menunjukan grafik perbandingan torque-kecepatan motor induksi AC tiga fase dengan arus yang sudah ditetapkan. Bila motor (Parekh, 2003) sebagai berikut :
Mulai menyala ternyata terdapat arus nyala awal yang tinggi dan torque yang rendah (“pull-up torque”).
Pada kecepatan penuh, atau kecepatan sinkron, arus torque dan stator turun ke nol.
Gambar 2.5 Torsi-Kecepatan Motor AC Induksi
2.1.3 Motor Inverter (Variable Frequency Drive)
Motor inverter atau variable frequency drive merupakan sebuah alat pengatur kecepatan motor dengan mengubah nilai frekuensi dan tegangan yang masuk ke motor pengaturan nilai frekuensi dan tegangan ini dimaksudkan untuk mendapatkan kecepatan putaran dan torsi motor yang di inginkan atau sesuai dengan kebutuhan. Secara sederhana prinsip dasar inverter untuk dapat mengubah frekuensi menjadi lebih kecil atau lebih besar yaitu dengan mengubah tegangan AC menjadi tegangan DC kemudian dijadikan tegangan AC lagi dengan frekuensi yang berbeda atau dapat diatur.
Gambar 2.6 Inverter
Untuk mengubah tegangan AC menjadi DC dibutuhkan penyearah (converter
Kemudian tegangan DC diubah menjadi tegangan AC kembali oleh inverter
dengan teknik PWM (Pulse Width Modulation). Dengan teknik PWM ini bisa didapatkan amplitudo dan frekuensi keluaran yang diinginkan. Selain itu teknik PWM juga menghasilkan harmonisa yang jauh lebih kecil dari pada teknik yang lain serta menghasilkan gelombang sinusoidal, dimana kita tahu kalau harmonisa ini akan menimbulkan rugi-rugi pada motor yaitu cepat panas. Maka dari itu teknik PWM inilah yang biasanya dipakai dalam mengubah tegangan DC menjadi AC (inverter).
Memang ada banyak cara untuk mengatur atau mengurangi kecepatan motor seperti dengan gear box atau reducer. Namun mengatur kecepatan motor dengan inverter akan memperoleh banyak keuntungan yang lebih bila dibandingkan dengan cara-cara yang lain. Seperti : jangkauan yang luas untuk pengaturan kecepatan dan torsi motor, mempunyai akselerasi dan deselerasi yang dapat diatur, mempermudah proses monitoring atau pengecekan, sistem proteksi motor yang baik, mengurangi arus starting motor dan menghemat pemakaian energi listrik, memperhalus start
awal motor.
Gambar 2.7 Variable Frequency Drive
2.2OrCAD PSpice
Berkembangnya berbagai macam IC (Integrated Circuit) menuntut suatu metode untuk menguji dan mencoba rancangan rangkaian. SPICE (Simulation
Program with Integrated Circuit Emphasis) adalah program yang mampu melakukan simulasi rangkaian elektronika pada komputer.
PSpice (singkatan dari Personal Simulation Program with Integrated
Circuit Emphasis) adalah perangkat lunak simulasi untuk proses perancangan
yang dipakai di UC Berkeley pada tahun 1984 dan seterusnya pada komputer pribadi IBM.
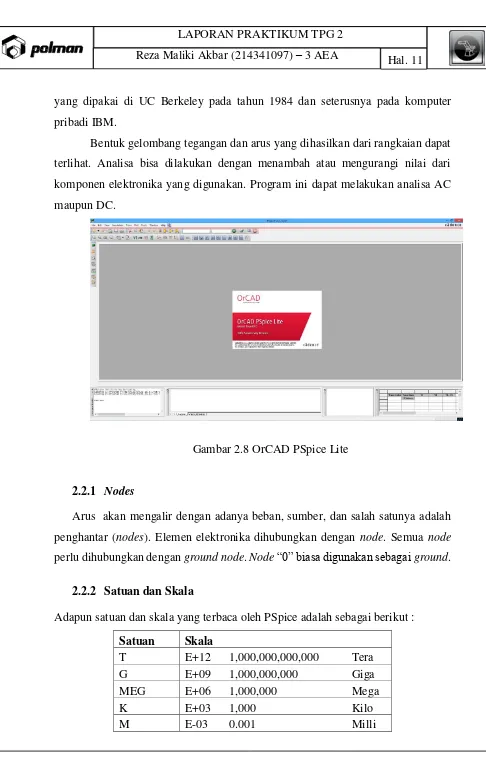
Bentuk gelombang tegangan dan arus yang dihasilkan dari rangkaian dapat terlihat. Analisa bisa dilakukan dengan menambah atau mengurangi nilai dari komponen elektronika yang digunakan. Program ini dapat melakukan analisa AC maupun DC.
Gambar 2.8 OrCAD PSpice Lite
2.2.1 Nodes
Arus akan mengalir dengan adanya beban, sumber, dan salah satunya adalah penghantar (nodes). Elemen elektronika dihubungkan dengan node. Semua node
perlu dihubungkan dengan groundnode. Node“0” biasa digunakan sebagai ground.
2.2.2 Satuan dan Skala
Adapun satuan dan skala yang terbaca oleh PSpice adalah sebagai berikut :
Satuan Skala
U E-06 0.000001 Micro
Terdapat dua jenis sumber yaitu sumber Independent Sources dan Dependent
Sources.
2.2.3.1. Independent Sources
2.2.3.1.1 Independent DC Sources
Voltage source: Vname N+ N- <DC=> DCValue Current source: Iname N+ N- <DC=> DCValue N+ terminal positif
N– terminal negatif DCValue nilai DC
2.2.3.1.2 Independent AC Sources
Voltage source: Vname N+ N- AC ACValue, Phase Current source: Iname N+ N- AC ACValue, Phase N+ terminal positif
ACValue nilai AC ACPhase fasa (derajat)
2.2.3.2. Dependent Sources
Beberapa contoh dependent source adalah: 1. Polynomial
2. VCVS 3. CCCS 4. VCCS 5. CCVS
Voltage controlled voltage source: Ename N+ N- NC1 NC2 Value Voltage controlled current source: Gname N+ N- NC1 NC2 Value Current controlled voltage source: Hname N+ N Vcontrol Value Current controlled current source: Fname N+ N- Vcontrol Value
N+ and N terminal positif dan negative untuk dependent sources
NC1 and NC2 terminal positif dan negative dari terkontrol tegangan
Vcontrol is nilai 0 dari sumber volt untuk mengukur terkontrol arus
2.2.3.3. Bentuk-bentuk independent sources
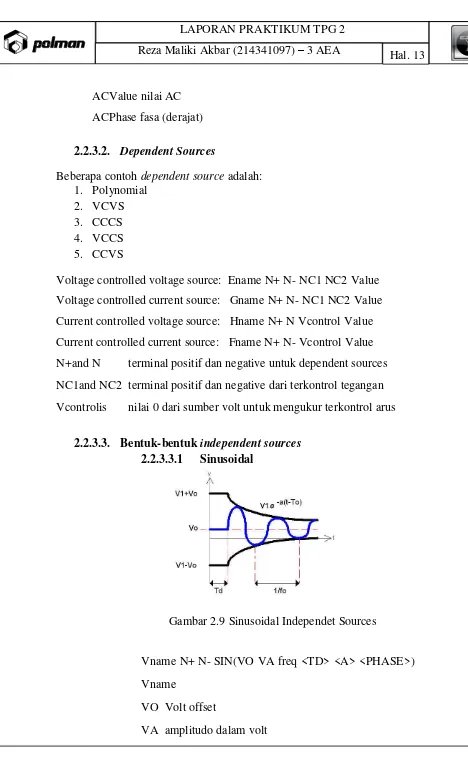
2.2.3.3.1 Sinusoidal
Gambar 2.9 Sinusoidal Independet Sources
Vname N+ N- SIN(VO VA freq <TD> <A> <PHASE>)
Vname
VO Volt offset
freq frekuensi dalam hertz
TD waktu delay dalam secon
A damping per secon
Phase fasa dalam derajat
(If TD, a and PHASE tidak ada maka dianggap 0)
2.2.3.3.2 PWL (Piece-Wise Linear)
Gambar 2.10 PWL Independet Sources
Vname N+ N- PWL(T1 V1 T2 V2 T3 V3 ... Tn Vn)
(Ti Vi) menunjukkan nilai volt Vi pada waktu Ti
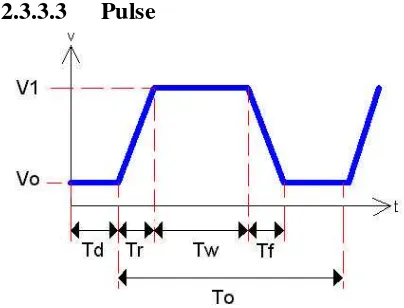
2.2.3.3.3 Pulse
Gambar 2.11 Pulse Independet Sources
Vname N+ N- PULSE(Vo V1 Td Tr Tf Tw To)
Vo - initial voltage
Td - initial delay time
Tr - rise time
Tf - fall time
Tw - pulse-width
To - periode
2.2.3.3.4 Eksponensial
Gambar 2.12 Exponential Independent Sources
Vname N+ N- EXP(V1 V2 TD1 TAU1 TD2 TAU2 )
V1 - initial voltage
V2 - peak voltage
TD1 – Rise delay time
TAU1 Rise time constant
TD2 Fall delay time
TAU2 Fall time constant
2.2.4 Semiconductor Devices
2.2.4.1 Diode
Dname N+ N- MODName
MODEL MODName D (IS= N= Rs= CJO= Tt= BV= IBV=)
N+ anoda
MODName penamaan dari model dioda
IS – arus saturasi (=1E-14A), N – koefisien emisi (=1),
RS – seri dari resistor (=0 ohm),
CJO–junction capacitance, (=0F),
TT – waktu transit (=0sec),
BV - reverse bias breakdown voltage, (=infinite) and
IBV - the reverse bias breakdown current, (=1xE-10A).
2.2.5 Metode Analisis
2.2.5.1 .TRAN Statement
.TRAN TSTEP TSTOP <TSTART <TMAX>> <UIC> TSTEP` printing increment (waktu perhitungan per dertik ) TSTOP waktu akhir
.PRINT TYPE OV1 OV2 OV3... .PLOT TYPE OV1 OV2 OV3...
OV1, OV2 Tegangan (V) atau arus (I) node dengan ground
2.2.6.2 .PROBE
Untuk menghasilkan keluaran secara grafik
2.2.6.3 .FOUR
Untuk penghitungan fourier sebuah rangkaian
2.2.7.1 Resistor
Rname N+ N- Value N+terminal positif, N– terminal negatif, Value nilai resistor
2.2.7.2 Kapasitor dan Induktor
Cname N+ N- Value <IC=Initial Condition> Lname N+ N- Value <IC=Initial Condition>
BAB III
LAPORAN PRAKTIKUM
3.1Program PSpice
3.1.1 Karakteristik Kecepatan-Torsi Motor Induksi
1. Gambar Rangkaian
Gambar 3.1 Rangkaian Karakteristik Kecepatan-Torsi Motor Induksi 2. Program
*motor ac induction motor 15-3 VS 1 0 AC 170V
.PARAM SLIP=0.05 .PARAM RRES=0.42
.PARAM RSLIP={RRES*(1-slip)/slip} .STEP PARAM SLIP LIST 0.1 0.25 0.5 0.75 VX 1 2 DC 0V
.OPTIONS ABSTOL=1.00n RELTOL=0.01 VNTOL=0.1 ITL5=50000 .PROBE
3. Hasil Plot
Gambar 3.2 Plot Karakteristik Kecepatan-Torsi Motor Induksi 4. Analisa
Pada hasil plot, menghasilkan torsi Td = V(5) X I(Vy)/2 terhadap
frekuensi untuk menghasilkan beberapa ragam slip, bergantung nilai yang diberikan pada slip. Untuk slip, s = 0,1 ditunjukkan pada kurva berwarna
kuning. Untuk slip, s = 0,25 ditunjukkan pada kurva berwarna biru. Untuk slip, s = 0,5 ditunjukkan pada kurva berwarna merah. Untuk slip, s = 0,75 ditunjukkan pada kurva berwarna hijau.
Torsi menghasilkan kenaikan apabila nilai slip berkurang. Untuk slip yang tetap, ada wilayah dimana nilai torsinya konstan. Torsi yang dihasilkan oleh motor induksi dapat diformulasikan dengan
3.1.2 Karakteristik Kecepatan-Torsi Motor Induksi dengan Tahanan Variabel pada Rotor
1. Gambar Rangkaian
Gambar 3.3 Rangkaian Karakteristik Kecepatan-Torsi Motor Induksi dengan Tahanan Variabel pada Rotor
2. Program
*motor ac induction motor - rotor resistance 15-4 VS 1 0 AC 170V
.OPTIONS ABSTOL=1.00n RELTOL=0.01 VNTOL=0.1 ITL5=50000 .PROBE
3. Hasil Plot
Gambar 3.4 Plot Karakteristik Kecepatan-Torsi Motor Induksi dengan Tahanan Variabel pada Rotor
4. Analisa
Pada hasil plot, menghasilkan torsi Td = V(5) X I(Vy)/2 terhadap frekuensi untuk menghasilkan beberapa ragam slip, bergantung nilai yang
diberikan pada slip. Untuk resistansi rotor, Rr = 0,42 ditunjukkan pada kurva berwarna kuning. Untuk resistansi rotor, Rr = 0,3 ditunjukkan pada kurva berwarna biru. Untuk resistansi rotor, Rr = 0,2 ditunjukkan pada kurva berwarna merah. Untuk resistansi rotor, Rr = 0,1 ditunjukkan pada kurva berwarna hijau.
Torsi menghasilkan kenaikan apabila nilai hambatan pada rotor berkurang.
3.2 Penggerak Motor Induksi SPWM
3.2.1 Tujuan
1. Melakukan set-up penggerak motor induksi.
2. Menentukan tingkah laku pada operasi pengereman.
3. Menentukan tingkah laku pada operasi pembalikan putaran.
4. Menentukan bentuk gelombang tegangan dan arus jala-jala saat
operasi tanpa beban dan dengan beban.
5. Menentukan bentuk gelombang tegangan dan arus fasa motor juga
6. Menentukan bentuk gelombang tegangan dan arus fasa motor saat
operasi tanpa beban.
7. Menentukan bentuk gelombang tegangan dan arus fasa motor saat
operasi dengan beban.
3.2.2 Percobaan
1. Alat dan bahan yang digunakan
a. Motor induksi tiga fasa
b. Trainer Penggerak Motor Induksi SPWM c. Motor DC magnet permanen
d. Kopling
j. FLUKE Power Harmonics Analyzer
2. Rangkaian percobaan dan pengkabelan
3.2.3 Prosedur Percobaan
1. Set-up penggerak motor induksi
a. Penyetelan dasar
1. Lakukan Pengkabelan pada penggerak motor seperti pada
(2.2).
2. Atur potensiometer pengatur kecepatan pada posisi maksimum
CCW.
b. Penyetelan fungsi otomatis
1. Hidupkan jala-jala. Tekan tombol MON dan jika perlu tombol ▲ atau ▼sehingga ditampilkan AU1 kemudian ENT. Setel nilai dengan menggunakan tombol ▲ atau ▼ menjadi 0 kemudian tombol ENT. Ini berarti fungsi percepatan dan perlambatan berfungsi manual.
2. Tekan tombol ▲ atau ▼ sehingga tampil AU2 dan untuk
mengatur nilai AU2 menjadi 0 tekan tombol ENT. Ini berarti penguatan momen putar (torque boosting) secara otomatis yang terjadi pada kecepatan rendah dinonaktifkan.
3. Tekan tombol ▲ atau ▼ sehingga tampil AU3 dan untuk
mengatur nilai AU3 menjadi 0 tekan tombol ENT. Ini berarti fungsi parameter otomatis untuk motor 50 Hz dan 60 Hz dinonaktifkan.
c. Penyetelan fungsi dasar
1. Tekan tombol ▲ atau ▼ sehingga tampil CnOd dan untuk
mengatur nilai CnOd menjadi 1 tekan tombol ENT. Ini berarti jenis komando gerak berasal dari internal.
2. Tekan tombol ▲ atau ▼ sehingga tampil FnOd dan untuk
3. Tekan tombol ▲ atau ▼ sehingga tampil FH dan untuk
mengatur nilai FH menjadi 50 tekan tombol ENT. Ini berarti frekuensi keluaran penggerak maksimum sebesar 50 Hz. 4. Tekan tombol ▲ atau ▼ sehingga tampil UL dan untuk
mengatur nilai UL menjadi 50 tekan tombol ENT. Ini berarti batas atas frekuensi keluaran penggerak sebesar 50 Hz. 5. Tekan tombol ▲ atau ▼ sehingga tampil LL dan untuk
mengatur nilai LL menjadi 0 tekan tombol ENT. Ini berarti batas bawah frekuensi keluaran penggerak sebesar 0 Hz. 6. Tekan tombol ▲ atau ▼ sehingga tampil uL dan untuk
mengatur nilai uL menjadi 50 tekan tombol ENT. Ini berarti frekuensi dasar motor (base frequency) sebesar 50 Hz.
7. Tekan tombol ▲ atau ▼ sehingga tampil Pt dan untuk
mengatur nilai Pt menjadi 0 tekan tombol ENT. Ini berarti V/f
konstan.
8. Tekan tombol ▲ atau ▼ sehingga tampil Fr dan untuk
mengatur nilai Fr menjadi 0 tekan tombol ENT. Ini berarti arah putaran CW.
d. Penyetelan penguatan momen putar (voltage boosting)
Fs.nom = 50 Hz
Atur nilainya menjadi 5 dengan menggunakan tombol atau kemudian tombol ENT. Ini berarti waktu untuk percepatan sebesar 5 detik.
3. Tekan tombol ▲ atau ▼ sehingga tampil dEC kemudian tekan
tombol ENT. Atur nilainya menjadi 5 dengan menggunakan tombol ▲ atau ▼ kemudian tombol ENT. Ini berarti waktu untuk perlambatan sebesar 5 detik.
4. Tekan tombol MON dua kali. Tampilan seven-segment akan
menampilkan frekuensi yang disuplai ke stator motor.
5. Tekan tombol RUN dan atur potensiometer pengaturan
kecepatan sampai pada tampilan seven-segment ditampilkan 0.8. Ini berarti frekuensi yang disuplaikan ke motor sebesar 0,8 Hz. Tentukan kecepatan putar rotor yang seharusnya nr.
fs = 0,8 Hz
6. Bebani motor pada beban nominal. Tekan tombol MON dan jika perlu tombol ▲ atau ▼ sehingga tampil uB kemudian tekan tombol ENT. Atur nilainya dengan menggunakan tombol ▲ atau ▼ dan ukur kecepatan puter motor dengan tachometer sampai kecepatan putarnya sama seperti nr pada
(4.5). Tekan tombol ENT dan kembalikan potensiometer ke maksimum CCW. (uB = 12.5 %)
2. Tingkah laku pada operasi pengereman
Pengukuran waktu pengereman dan percepatan
1. Tekan tombol MON dua kali. Ditampilkan pada seven segment
2. Tekan tombol RUN dan operasikan motor pada kecepatan putar n =
2000 rpm dengan mengatur potensiometer pengatur kecepatan. 3. Setelah motor mencapai kecepatan yang diinginkan tekan tombol
STOP. Jika motor sudah berhenti tekan kembali tombol RUN. 4. Gambarkan pada diagram berikut waktu percepatan demikian juga
pengereman .
5. Alur waktu percepatan dan pengereman sebesar 20 detik.
6. Tampilkan tampilan frekuensi stator motor pada penggerak dan
ulangi prosedur (1.2) dan (1.3). Gambarkan pada diagram dalam prosedur (1.4) dengan garis putus-putus.
Analisa
yang terjadi adalah fall time hingga motor berhenti berputar. Besarnya fall time dan rise time ditentukan oleh pengaturan nilai ACC dan DEC.
3. Tingkah laku pada operasi pembalikan putaran
1. Tekan tombol MON dan jika perlu tombol ▲ atau ▼ sehingga
tampilan Fr kemudian setel nilainya menjadi 1 untuk putaran balik.
2. Ubah waktu percepatan dan pengereman menjadi 5 detik. Kemudian
ubah arah putaran motor.
Analisa
4. Tegangan dan arus jala-jala saat operasi dengan tanpa beban
1. Rangkaikan Rukur pada netral jala-jala dan operasikan motor pada
kecepatan n = 2000rpm.
3. Ukur bentuk gelombang arus jala-jala dengan fasa yang benar
terhadap VL1N.
IL1N = 1.40 A
4. Ukur arus motor dengan multi-meter digital dan bebani motor
5. Ukur arus jala-jala dengan osiloskop dengan fasa yang benar terhadap
VL1N.
IL1N = 1,51 A
Analisa
Saat beban motor semakin besar, arus di jala-jala semakin besar begitupun sebaliknya ketika beban diperkecil lalu tidak diberikan beban, maka arus di jala-jala akan semakin kecil. Dapat disimpulkan bahwa arus sama dengan pembebanan pada motor.
5. Tegangan antar fasa, arus fasa dan tegangan fasa beban saat beban
resistor sama besar dan terhubung Y
1. Ganti beban motor dengan beban yang terdiri atas 3 buah resistor sama
besar dan terhubung Y.
2. Ukur bentuk gelombang VUV dengan osiloskop.
3. Ukur bentuk gelombang tegangan fasa beban VU dengan osiloskop.
4. Ukur bentuk gelombang arus fasa beban Iu dengan osiloskop.
Analisa
Terdapat perbedaan antara tegangan fasa pada beban resistor dan beban motor yaitu bentuk gelombang arus pada beban resistor terjadi
noise. Beban resistor mengalami perubahan arus akan terjadi secara
tiba-tiba mengikuti dengan perubahan tegangan. Dapat dilihat juga dengan perbandingan sebelum diberi beban dan sesudahnya.
Pada arus, semakin besar beban maka semakin besar peningkatan arus. Jika motor membutuhkan torsi yang besar, maka dibutuhkan arus yang besar pula.
6. Tegangan antar fasa, arus fasa motor saat motor dengan beban
1. Operasikan dengan beban sehingga Imotor = 0,8 . Inom pada kecepatan
2. Ukur bentuk gelombang vuv dengan osiloskop.
Analisa
Pada grafik tegangan terjadi banyaknya noise dikarenakan motor diberi beban. Arus pun semakin melonjak dikarenakan torsi yang cukup besar, sama seperti analisa pada praktikum sebelumnya.
3.3Penggerak Motor Induksi Menggunakan Variable Frequency Drive
(Pengganti KBVF)
3.3.1 Tujuan
1. Melakukan set-up penggerak motor induksi
2. Mengoperasikan dan mengatur kecepatan motor tiga fasa menggunakan switch pada terminal board.
3. Menentukan bentuk gelombang tegangan dan arus fasa motor ketika dilakukan variasi-variasi switching.
3.3.2 Percobaan
2. Alat dan bahan yang digunakan
a. Motor induksi tiga fasa b. Motor DC magnet permanen c. Kopling
d. Tachometer e. Osiloskop digital f. Multimeter digital
g. Power Harmonics Analyzer h. Tiga Switch
i. Terminal board
3. Rangkaian percobaan
3.3.3 Prosedur percobaan
Setting inverter seperti pada tabel di bawah ini
Mode Function Adjustment range Setting value
Cnod Command Mode
*range kecepatan motor dapat diatur sesuai kebutuhan.
Langkah-langkahnya sebagai berikut :
1. Pada tampilan awal program tekan “MODE”.
2. Gunakan selector up-down untuk mencari “Cnod” lalu tekan “ENT”. 3. Gunakan kembali selector up-down untuk meberi “setting value = 0” 4. Kemudian tekan kembali “ENT” sampai dengan LCD tampilan awal
program menunjukkan 0.0.
6. Gunakan kembali selector up-down untuk mencari “F114”, lalu tekan “ENT”. Kemudian beri “Setting value = 6” menggunakan selector up -down pula.
7. Begitupula pada “F115” beri “setting value=7”, “F116” beri “setting
value=8” kemudian tekan “ENT” sampai dengan LCD tampilan awal
program menunjukkan 0.0. 8. Tekan kembali “MODE”.
9. Gunakan selector up-down untuk mencari “Sr1” lalu tekan “ENT”. 10. Gunakan kembali selector up-down untuk memberi “setting value = 2.0” 11. Begitupula pada “Sr2” beri “setting value = 4.0”sampai dengan “Sr7”
beri “Setting Value = 14.0” mengikuti settingan inverter pada tabel di atas kemudian tekan “ENT” sampai dengan LCD tampilan awal program menunjukkan 0.0.
Hasil Percobaan
1. Saklar 1
4. Saklar 4
7. Saklar 7
Analisa
BAB IV PENUTUP
4.1. Kesimpulan
1. PSpice adalah software simulator elektronika baik itu analog dan atau digital di PC, digunakan untuk menganalisis dan mengidentifikasi rangkaian elektronika.
2. Motor inverter atau variable frequency drive berfungsi untuk mengatur frekuensi dan kecepatan sesuai kebutuhan.
3. Semakin besar torsi pada motor, semakin besar perubahan arus. 4. Apabila di motor dipasang beban terjadi noise di tegangan.
5. Pada motor induksi apabila nilai slip dan hambatan rotornya kecil berarti nilai torsinya besar.
4.2. Saran
DAFTAR PUSTAKA
Ali, Muhamad, Materi Elektronika Daya – Bab VII Inverter [pdf]
(https://muhal.files.wordpress.com/2010/03/materi-elektronika-daya-inverter.pdf diakses pada tanggal 9 Februari 2016)
Anonim, 2016, Handout PSpice, Politeknik Manufaktur Negeri Bandung, Bandung.
Elektronika Dasar, “Inverter DC ke AC”, Elektronika Dasar,
http://elektronika-dasar.web.id/inverter-dc-ke-ac/ (diakses 12 Maret 2016)
Kris, “Latar Belakang Inverter”, Kris Aja,
http://kr1s-aja.blogspot.co.id/2012/01/latar-belakang-inverter.html (diakses 12 Maret 2016)
Politeknik Manufaktur Negeri Bandung, Teknik Penggerak 2, Bandung. 2004.
Rashid, M. H. Power Electronics Handbook: Devices, Circuits, and Applications
3rd Edition. Burlington : Elsevier. 2011.
Wikipedia, “PSpice”, Wikipedia Bahasa Indonesia, https://id.wikipedia.org/wiki/PSpice/ (diakses 12 Maret 2016)
Wikipedia, “Power Inverter”, Wikipedia Bahasa Inggris,
https://en.wikipedia.org/wiki/Power_inverter (diakses 12 Maret 2016)