Pengendali PID Berbasis PLC Modicon TSX Micro 3722 Untuk
Mengatur Kecepatan Motor Induksi Tiga Fase
Aris Rakhmadi, Taufiq Sawaludin
Teknik Elektro Universitas Muhammadiyah Surakarta Jl. A. Yani Tromol Pos 1 Pabelan Kartasura
Email: [email protected] Abstrak
Makalah ini membahas mengenai pengendali proporsional-integral-derivatif yang diimplementasikan pada PLC Modicon TSX Micro 3722 untuk mengatur kecepatan motor induksi tiga fase. Kecepatan motor induksi cenderung turun jika diberi beban sehingga diperlukan suatu pengendali untuk mempertahankan kecepatan yang diinginkan. Pengendali juga diperlukan untuk mengatasi perubahan kecepatan saat beban dilepas atau diberikan.
Kecepatan motor induksi diatur dengan mengatur frekuensi tegangan masukan. Pengaturan frekuensi dilakukan oleh inverter Altivar 66 yang mengubah tegangan AC dari PLN menjadi DC kemudian menjadi AC lagi dengan frekuensi yang diinginkan.
Kombinasi antara mode proporsional, integral, dan derivatif menghasilkan pengendali yang bagus dan handal karena ketiga mode tersebut dapat saling melengkapi kekurangan masing-masing. Pengendali PID cocok untuk mengatasi perubahan beban yang mendadak.
Kata Kunci: Proposional Integral Derivatif (PID), Programmable Logic Controller, Motor Induksi, Modicon TSX Micro 3722.
1. Pendahuluan
Motor AC lebih banyak digunakan daripada motor DC karena arus AC dapat dibangkitkan dan didistribusikan dengan biaya yang lebih murah daripada arus DC. Selain itu, motor AC memiliki keunggulan dalam hal biaya, ukuran, berat, dan membutuhkan lebih sedikit perawatan dibanding motor DC.
Motor induksi sangkar tupai adalah jenis motor AC yang paling banyak digunakan dalam industri. Motor ini dapat dioperasikan di tempat di mana banyak terdapat gas dan debu atau pada kondisi yang sangat lembab dan akan beroperasi dengan sangat baik dengan sedikit perhatian. Motor ini tidak memiliki sikat dan komutator, dan konstruksinya kuat, sehingga mampu menahan lonjakan arus yang besar, dan mudah untuk perbaikan dan perawatan.
Kecepatan sinkron motor induksi (ns) dirumuskan
dengan ns = 120 f/p sehingga pengaturan kecepatan
dapat dilakukan dengan mengatur frekuensi tegangan masukan (f) atau dengan mengubah jumlah kutub (p). Pengaturan kecepatan dengan mengubah jumlah kutub dilakukan dengan merancang lilitan stator sedemikian rupa sehingga dengan pengubahan sederhana pada hubungan kumparan, jumlah kutub dapat diubah dengan
perbandingan 2:1. Cara ini tidak praktis dan hanya dapat menghasilkan variasi kecepatan yang sedikit. Sedangkan pengaturan kecepatan dengan pengaturan frekuensi, dilakukan dengan inverter, dapat menghasilkan perubahan kecepatan yang diskret maupun kontinyu dengan rentang pengaturan yang lebar, perubahan kecepatan yang halus, dan tanggapan pengaturan yang cepat.
Dahulu motor DC lebih disukai untuk dioperasikan pada kecepatan yang bervariasi karena pengendaliannya mudah dan tanggapannya cepat. Namun setelah dikembangkannya inverter penggunaan motor AC untuk kecepatan yang bervariasi pun menjadi populer. Beberapa aplikasi yang penting dari pengendalian kecepatan motor induksi adalah pada pengendalian kecepatan kipas angin, kompresor, pompa, dan blower.
1.1. Perumusan Masalah
Ketika motor induksi dioperasikan secara langsung dari tegangan jala-jala (pada frekuensi 50 Hz dan besar tegangan tetap), motor induksi berputar dengan kecepatan yang relatif konstan. Namun demikian, kecepatan motor dipengaruhi oleh beban. Saat beban motor bertambah maka kecepatannya akan turun, dan sebaliknya. Jika motor ingin dioperasikan pada
kecepatan konstan saat bebannya berubah, diperlukan suatu pengendali untuk mengatur frekuensi tegangan masukan. Masalah mengenai pengendali untuk mengatur agar kecepatan motor mencapai setpoint dengan cepat dan stabil akan diteliti dalam penelitian ini.
1.2. Tujuan dan Batasan Penelitian
Tujuan penelitian ini adalah merancang pengendali proporsional-integral-derivatif yang dimple-mentasikan dalam PLC untuk mengatur kecepatan motor induksi tiga fase.
Penelitian ini merancang sistem pengendalian kecepatan motor induksi tiga fase jenis sangkar tupai dengan inverter Altivar 66 produksi Schneider dan PLC TSX 3722 produksi Schneider yang diprogram dengan perangkat lunak PL7 Junior. Motor induksi diberi beban berupa generator DC seri dan kecepatan motor disensor dengan rotary encoder. Rotary encoder akan mengubah kecepatan motor menjadi pulsa dengan frekuensi yang sesuai yang bersama dengan setpoint akan diolah oleh PLC dengan mode kendali proporsional-integral-derivatif. PLC menghasilkan keluaran berupa tegangan
DC 0-5 V yang merupakan masukan bagi Altivar 66. Altivar kemudian menghasilkan keluaran berupa tegangan AC tiga fase dengan tegangan dan frekuensi yang sesuai untuk menyuplai motor.
2. Perancangan Sistem
Sistem yang dirancang adalah sistem untuk mengendalikan kecepatan motor induksi tiga fase. Ketika motor induksi dioperasikan pada kecepatan tertentu kemudian diberi beban, kecepatannya cenderung turun. Sistem ini digunakan untuk mengatur agar, saat diberi beban atau saat beban dilepas, kecepatan motor dapat dipertahankan konstan. Sistem ini dapat pula digunakan untuk mengubah-ubah kecepatan motor induksi sesuai dengan kecepatan yang diinginkan, sepanjang masih dalam kemampuan kerja motor induksi.
2.1. Perangkat Keras
Perangkat keras terdiri dari sebuah personal
computer (PC) dan sebuah PLC Modicon TSX Micro
3722 sebagai pengolah isyarat kendali, sebuah inverter Altivar 66 sebagai aktuator untuk mengubah frekuensi
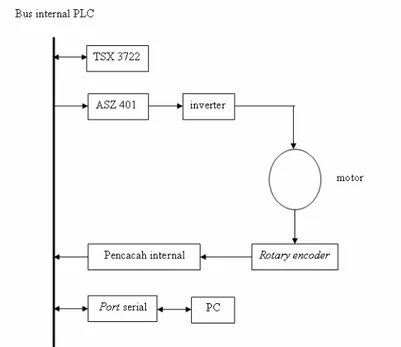
Gambar 1. Diagram kotak sistem pengendalian
tegangan jala-jala, sebuah motor induksi dan beban berupa generator DC dan resistor sebagai plant, dan
rotary encoder sebagai sensor. PLC dihubungkan
dengan PC dengan kabel TSC PCU 1030 melalui port serial, keluaran PLC dimasukkan ke inverter melalui terminal AI2 dan COM, dan umpan balik diberikan oleh
rotary encoder melalui terminal CNT 1 pada PLC.
Diagram kotak dan diagram bus dari sistem ini masing-masing ditunjukkan pada gambar 1 dan gambar 2. Secara rinci, perangkat keras tersebut adalah:
1. Personal Computer (PC)
PC digunakan untuk pemrograman PLC menggunakan perangkat lunak PL7 Junior. Program yang telah dibuat kemudian ditransfer ke PLC untuk dijalankan. Nilai setpoint dan konstanta-konstanta PID dimasukkan melalui tabel animasi yang digunakan pula untuk mengamati proses yang sedang berlangsung. Dengan PL7 Junior, modifikasi program dapat dilakukan ketika proses sedang berlangsung.
2. Programmable Logic Controller (PLC)
Umpan balik masuk ke PLC melalui masukan untuk pencacah internal yaitu di channel 11 (CNT 1). Semua proses perhitungan dan manipulasi isyarat kesalahan (error) dilakukan di CPU, dan keluaran pengendali adalah pada modul keluaran analog TSX ASZ 401. Modul ini memiliki empat saluran keluaran dengan isyarat berbentuk tegangan DC yang memiliki wilayah kerja antara –10V sampai dengan 10 V.
Pencacah internal dapat digunakan untuk mencacah naik (upcounting), mencacah turun (downcounting), atau mencacah naik/turun (up/downcounting). Pada sistem ini pencacah digunakan untuk mencacah naik (upcounting) pulsa yang dihasilkan oleh rotary encoder. Karena pencacah digunakan untuk menghitung kecepatan motor, yaitu dengan mengurangkan hasil pencacahan sekarang dan hasil pencacahan sebelumnya, maka nilai setpoint yang digunakan adalah 16777215, yaitu nilai maksimal yang dapat dihitung oleh pencacah. Jika nilai setpoint sudah tercapai maka pencacah akan mulai menghitung dari 0 lagi. Penentuan nilai sepoint dilakukan pada saat konfigurasi.
3. Inverter
Inverter adalah rangkaian elektronika daya yang mengubah tegangan dan frekuensi tegangan jala-jala agar sesuai dengan yang dibutuhkan oleh motor induksi untuk menghasilkan kecepatan yang diinginkan. Inverter menerima isyarat pengendalian dari PLC berupa tegangan DC dan menghasilkan keluaran AC dengan tegangan dan frekuensi yang sesuai untuk menyuplai motor.
Inverter yang digunakan adalah Altivar 66 produksi Schneider, dengan rating: daya = 2.2 kW, Imaks = 8 A,
tegangan masukan = 400-460 V. Tegangan keluaran maksimal inverter adalah sebesar tegangan masukannya. Altivar 66 memiliki berbagai feature yang dapat diprogram melalui keypad. Feature yang dimanfaatkan pada sistem ini adalah mode auto dan parameter setting. Mode auto memungkinkan inverter ini dihubungkan dengan pengendali PID, yaitu melalui terminal masukan
AI2. Dengan mengubah posisi saklar yang berada pada
card kendali, isyarat masukan terminal AI2 dapat dipilih
berupa arus (0-20 mA, 4-20 mA, atau 20-4 mA) atau tegangan (0-5 Volt). Pada sistem ini isyarat yang digunakan adalah tegangan karena keluaran dari PLC berupa tegangan.
Parameter setting digunakan untuk mengatur
rentang frekuensi keluaran, akselerasi, dan deselerasi. Rentang frekuensi maksimal yang dapat digunakan adalah 0-200 Hz dengan besar tegangan 0-410 Volt, sedangkan yang digunakan pada sistem ini adalah 0-65 Hz. Jadi tegangan keluaran PLC sebesar 0-5 V merepresentasikan tegangan keluaran inverter sebesar 0-410 V dengan frekuensi 0-65 Hz. Akselerasi dan deselerasi motor ditetapkan sebesar 6 detik.
4. Motor induksi dan beban
Motor yang digunakan adalah motor induksi sangkar tupai tiga fase empat kutub dengan rating: 380 V (terhubung Y), 1,1 A, 50 Hz, 1370 rpm, ¼ HP. Beban yang digunakan adalah generator DC seri dan resistor. Variasi beban dilakukan dengan mengatur nilai resistor. Motor induksi sangkar tupai memiliki konstruksi yang kuat sehingga dapat dioperasikan pada tegangan sebesar dua kali tegangan rating-nya. Dalam sistem ini tegangan dan frekuensi maksimal yang dihasilkan inverter adalah 410 V dan 65 Hz. Kecepatan motor maksimal pada saat tanpa beban adalah 1925 rpm dan pada saat beban penuh adalah 1500 rpm.
5. Rotary Encoder
Rotary encoder berfungsi untuk mengetahui kecepatan aktual motor. Alat ini akan merubah putaran motor menjadi pulsa. Rotary encoder mempunyai tiga keluaran yaitu A, B, dan M. keluaran A dan B menghasilkan 200 pulsa per putaran dengan beda fase antara pulsa A dan B 900 sedangkan keluaran M
menghasilkan 1 pulsa per putaran. Dalam tugas akhir ini digunakan keluaran A untuk mencacah naik. Kemampuan dari pencacah internal adalah 10 kHz sehingga putaran maksimal yang diperbolehkan agar tetap dalam daerah kerja adalah 3000 rpm.
2.2. Pengendali PID Digital
Pengendali Proporsional-Integral-Derivatif dipilih untuk sistem ini karena cukup handal untuk mengatasi perubahan beban yang besar dan mendadak. Mode integral digunakan untuk menghilangkan offset proporsional dan mode derivatif digunakan untuk mengurangi kecenderungan terhadap osilasi dan menyediakan aksi kendali yang mengantisipasi perubahan isyarat kesalahan.
Implementasi pengendali PID dalam komputer adalah sebagai berikut:
1. Mode proporsional
Mode proporsional diimplementasikan dalam komputer dengan persamaan yang sama dengan persamaan analog, yaitu:
dengan P : keluaran pengendali proporsional, KP :
gain proporsional, dan E: isyarat kesalahan.
2. Mode Integral
Untuk menggunakan mode ini kita perlu cara untuk menghitung integral isyarat kesalahan. Ada banyak algoritma yang dikembangkan, semuanya hanyalah perkiraan/pendekatan karena hanya sampel isyarat kesalahan yang tersedia. Cara yang paling sederhana disebut persegi, dan cara ini cukup akurat untuk digunakan dalam kendali. Persamaan untuk menghitung integrasi error adalah:
∫
0te
pdt
≈
[
S
+
e
pi]
∆
t
(2) dengan ∆t : waktu antar sampel, S = ep1 + ep2 + …. :jumlah isyarat kesalahan yang dihitung sebelum sampel variable, epi : sampel terakhir yang diambil pada waktu t
yang ditentukan dalam batas integral.
Semakin kecil waktu antar sampel maka hasilnya akan semakin mendekati hasil sebenarnya. Implementasi mode ini dalam komputer dilakukan dengan persamaan:
SUM=SUM+E (3) PI=KI*DT*SUM (4) dengan SUM: jumlah isyarat kesalahan, KI: gain
integral, dan DT: waktu antar sampel.
Karena KI*DT adalah faktor pengali terhadap SUM, keduanya sering digabungkan menjadi KI saja sehingga persamaan di atas dapat disederhanakan menjadi PI=KI*SUM.
3. Mode derivatif
Mode ini diimplementasikan dalam kendali komputer dengan menghitung pendekatan derivatif isyarat kesalahan dari sampel data. Sebuah derivatif didefinisikan sebagai pesat di mana kuantitas berubah selama periode sampel ∆t, oleh karena itu, ini hanya pendekatan. Persamaannya:
t
e
e
dt
e
d
pi pi pi∆
−
≈
−1 (5) dengan epi: sampel isyarat kesalahan sekarang, epi-1:sampel isyarat kesalahan sebelumnya, dan ∆t: waktu antar sampel. Dalam komputer persamaan di atas menjadi:
DE=E-E0 (6) E0=E (7) PD=KD*DE/DT (8)
dengan DE: derivasi isyarat kesalahan, E: isyarat kesalahan sekarang, E0: isyarat kesalahan sebelumnya, dan KD: gain derivatif.
Karena KD/DT adalah faktor pengali terhadap DE, keduanya sering digabungkan menjadi KD saja sehingga persamaan di atas dapat disederhanakan menjadi PD=KD*DE.
2.3. Program Pengendalian
Dalam PLC, implementasi pengendali PID untuk mengatur kecepatan motor induksi adalah sebagai berikut:
(*penentuan basis waktu*) %M0:=%S5;
(*enable pencacah internal*) IF %S13 THEN SET %Q0.11; END_IF; (*menghitung kecepatan motor*) IF RE %M0 THEN
%MD8:=(%ID0.11-%MD2)*3;
%MD2:=%ID0.11; (*md8 adalah kecepatan motor*) (*menghitung kecepatan rata-rata*)
ROL_ARW(1,%MW40:10);%MW40:=%MD8; END_IF;
%MW60:=(%MW40+%MW41+%MW42+%MW43+%MW44 +%MW45+%MW46+%MW47+%MW48+%MW49)/10; (*menghitung isyarat kesalahan*)
%MD10:=%MD14-%MW60;(*isyarat kesalahan=sp-pv*) %MF12:=DINT_TO_REAL(%MD10); (*integral*) IF RE %M0 THEN %MF16:=(%MF16+%MF12)*%MF20;END_IF; IF %MF16>=25000.0 THEN %MF16:=25000.0;END_IF; (*derivatif*) IF FE %M0 THEN %MF32:=(%MF12-%MF18)*%MF20; %MF18:=%MF12;END_IF; (*keluaran pengendali*) (*Mf22 =KP Mf24=KI Mf26=KD*) %MF30:=%MF22*(%MF12+%MF16*%MF24+%MF32*%MF26); %MD28:=REAL_TO_DINT(%MF30); (*batas-batas keluaran*) IF %MD28>=5000 THEN %MD28:=5000;END_IF; IF %MD28<=0 THEN %MD28:=0;END_IF; %QW4.1:=%MD28; (*pengambilan data*) IF RE %M0 THEN ROL_ARW(1,%MW300:40);%MW300:=%MD10; ROL_ARW(1,%MW340:40);%MW340:=%MW329; ROL_ARW(1,%MW380:40);%MW380:=%MW379; ROL_ARW(1,%MW420:40);%MW420:=%MW419; ROL_ARW(1,%MW250:40);%MW250:=%QW4.1;END_IF; Keterangan :
1. Basis waktu yang digunakan adalah objek sistem internal pada PLC, yaitu %S5 dengan periode 100 ms yang disimpan dalam memori bit %M0. 2. Pencacah internal diaktifkan dengan direct enable
yaitu memberikan nilai 1 pada %Q0.11, dan disini digunakan objek sistem internal %S13 yang akan mulai bernilai 1 saat PLC di RUN.
3. Nilai pencacahan yang sedang berlangsung pada pencacah internal berada pada alamat %ID0.11 kemudian disimpan di %MD2. Kecepatan motor dihitung dengan menghitung jumlah pulsa yang masuk pada selang waktu tertentu, yaitu selama 100ms. Jika motor berputar dengan kecepatan 1500 rpm, maka akan dihasilkan 500 pulsa sehingga untuk memperoleh kecepatan motor dalam rpm, jumlah pulsa dikalikan tiga. Karena penghitungan kecepatan ini tidak akurat, untuk mendapatkan kecepatan motor yang lebih tepat maka dihitung kecepatan rata-rata.
4. Isyarat kesalahan (error) dihitung dengan mengurangi setpoint dengan kecepatan rata-rata (dianggap sebagai present value). Kemudian dihitung pula integrasi dan derivasi isyarat kesalahan. %MF20 digunakan untuk meng-enable atau men-disable mode integral dan derivatif pada
saat penalaan, kemudian setelah penalaan selesai, %MF20 dapat dihilangkan saja.
5. Batas pada integral diperlukan agar nilai integrasi isyarat kesalahan tidak membengkak terlalu besar sehingga jika ada pengurangan nilai, maka sistem dapat menanggapinya dengan lebih cepat. Angka 25000.0 diperoleh dengan memperhitungkan nilai keluaran maksimal dan nilai Ki.
6. Untuk menjalankan program pengendalian ini operator perlu memasukkan setpoint dan konstanta-konstanta PID.
7. Pengolahan data untuk laporan tugas akhir dilakukan dengan Microsoft Excel. Data isyarat kesalahan disimpan dalam memori %MW300 sampai %MW439 dan data isyarat keluaran disimpan dalam memori %MW250 sampai %MW289 kemudian setelah PLC di-STOP, data ini dipindah ke Ms Excel.
3. Hasil dan Pembahasan
Basis waktu yang paling optimal untuk mencuplik kecepatan aktual motor dan untuk memperbarui isyarat pengendalian adalah 100 ms. Basis waktu yang lebih besar, misalnya 1 s, membuat sistem ini berosilasi dan basis waktu yang lebih kecil, misalnya 10 ms, membuat hasil pengukuran kecepatan tidak akurat.
Untuk mengukur kecepatan motor digunakan rotary
encoder yang menghasilkan 200 pulsa per putaran dan
pencacah internal PLC yang menghitung jumlah pulsa yang masuk dalam selang waktu tertentu. Pada saat motor dioperasikan dengan inverter pada kecepatan konstan, motor benar-benar berputar pada kecepatan konstan namun jumlah pulsa yang dihitung oleh
pencacah internal bervariasi. Bahkan setelah dihitung kecepatan rata-rata dari setiap sepuluh data yang masuk pun nilainya masih bervariasi dengan rentang antara –10 dan 10. Variasi ini disebabkan oleh keterbatasan system
bit PLC yang tidak dapat berdetak tepat setiap 100 ms
karena pengaruh dari waktu yang dibutuhkan untuk tiap siklus eksekusi program. Oleh karena itu, isyarat kesalahan yang berada dalam rentang –10 dan 10 rpm sudah tergolong sangat baik.
3.1. Penalaan PID
Untuk mendapatkan pengendali PID yang baik perlu diketahui konstanta-konstanta PID yang sesuai untuk plant yang dikendalikan. Konstanta PID yang tepat dapat diperoleh melalui penalaan yang dilakukan saat sistem sedang dijalankan. Dalam tugas akhir ini dilakukan penalaan yang berpedoman pada metode
ultimate cycle yang telah dimodifikasi.
Penalaan dilakukan dalam keadaan motor terhubung dengan generator namun tanpa beban dengan
setpoint 1500 rpm. Pertama-tama mode kendali integral
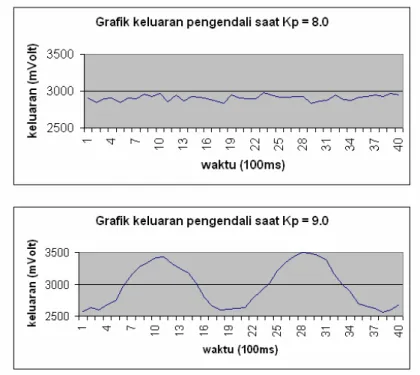
dan derivatif tidak digunakan terlebih dahulu (%MF20 diberi nilai 0.0) dan sistem dijalankan dengan memberi nilai Kp yang kecil, yaitu 1.0. Tanggapan sistem diamati, apakah variabel terkendalinya, yaitu %QW4.1, berosilasi. Karena saat Kp=1.0 keluaran tidak berosilasi, maka nilai Kp dinaikkan. Pada gambar 3 dapat dilihat bahwa isyarat keluaran mulai berosilasi saat Kp=8.0, namun belum tampak dengan jelas. Pada saat Kp=9.0, isyarat keluaran sudah berosilasi dengan jelas dan dengan amplitudo yang relatif konstan. Pada saat ini periode osilasinya adalah ultimate periode (Pu)=17. Nilai Ki dan Kd dihitung dengan rumus:
Gambar 5. Unjuk kerja pengendali proporsional, proporsional-integral, dan proporsional-integral-derivatif
pada keadaan transien dengan setpoint 1500 rpm.
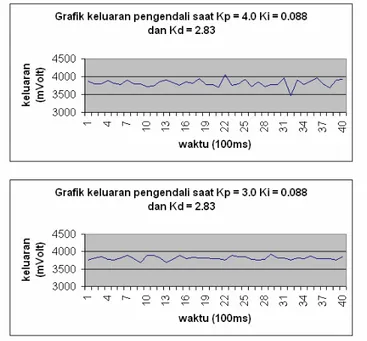
Gambar 4. Grafik keluaran pengendali saat keadaan tunak
Ki = 1.5/Pu = 0.088 Kd = Pu/6 = 2.83
Selanjutnya nilai Ki dan Kd dimasukkan, mode integral dan derivatif di-enable, kemudian tanggapan variabel terkendalinya diamati, dan Kp diatur. Jika tanggapan teredam lebih, Kp ditambah, jika tanggapan teredam kurang, Kp dikurangi. Pengaturan Kp terus dilakukan hingga diperoleh tanggapan sistem yang paling baik.
Pengaturan dimulai dari Kp = 9.0 kemudian diturunkan sedikit demi sedikit hingga keluaran pengendali stabil dan isyarat kesalahan mencapai tingkat minimal. Pada gambar 4 dapat dilihat bahwa isyarat keluaran mencapai tingkat kestabilan saat Kp = 3.0. Nilai Kp yang lebih kecil, yaitu 2.0, menghasilkan keluaran yang lebih stabil namun memberikan tanggapan yang lambat pada saat motor diberi beban. Nilai Kp yang lebih kecil dari 2.0 tidak mampu lagi membuat keluaran mencapai setpoint. Dengan pertimbangan-pertimbangan di atas, maka ditetapkan bahwa setting pengendali PID yang terbaik untuk plant ini adalah:
Kp = 3.0 Ki = 0.088 dan
Kd = 2.83
3.2. Unjuk Kerja Pengendali PID
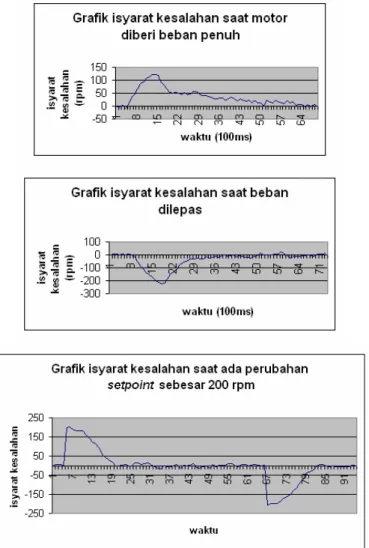
Untuk menunjukkan unjuk kerja PID, akan dibandingkan tanggapan sistem saat digunakan mode proporsional saja, proporsional-integral, dan proporsional-integral-derivatif. Pada gambar 5 dapat dilihat perbandingan unjuk kerja ketiga mode pengendali ini pada saat tanpa beban dengan setpoint 1500 rpm. Unjuk kerja pengendali PID dalam keadaan tunak ketika beban penuh diberikan dan dilepaskan dan ketika setpoint diubah dapat dilihat pada gambar 6.
Mode proporsional dengan Kp = 3.0 menghasilkan
offset yang besar. Offset terjadi karena isyarat kesalahan
yang dihasilkan terlalu kecil untuk dapat menaikkan keluaran. Jika Kp dinaikkan, misalnya menjadi 9.0, maka akan timbul osilasi, dan keluaran masih belum cukup besar untuk membuat kecepatan mencapai
setpoint. Jika Kp diperbesar lagi hingga setpoint dapat
tercapai, maka osilasinya akan semakin besar. Adanya osilasi dan offset memang merupakan kelemahan dari pengendali proporsional karena pengendali ini hanya akan menghasilkan keluaran jika ada isyarat kesalahan, dan jika isyarat kesalahan terlalu kecil, isyarat ini tidak mampu lagi mengendalikan variabel terkendali.
Mode integral ditambahkan untuk menghilangkan
offset. Jika ada isyarat kesalahan, integrator cenderung
untuk meningkatkan aksi kendali ke arah keluaran yang diinginkan. Jika isyarat kesalahan menghilang (nol) maka keluaran integrator yang kontinyu dan konstan digunakan untuk menjaga aksi kendali pada keadaan tunak. Pada gambar 5 dapat dilihat bahwa mode integral dapat menghilangkan offset, dan error dapat mencapai nilai minimum.
Mode derivatif digunakan untuk mempercepat tanggapan dinamik sistem. Mode derivatif mengantisipasi isyarat kesalahan yang akan terjadi dengan memperhatikan laju perubahan kesalahan. Mode derivatif mengurangi kecenderungan terhadap osilasi dan berguna terutama jika proses memiliki perubahan beban yang tiba-tiba. Pada gambar 5 pengaruh mode derivatif tidak tampak, overshoot dan settling time mode PI dan PID sama. Namun pada saat perubahan beban, mode ini memberi pengaruh dalam mengurangi lonjakan kecepatan. Kontribusi aksi derivatif pada saat perubahan beban dapat dilihat pada gambar 6.
4. Kesimpulan Dan Saran
Dari penelitian ini dapat disimpulkan bahwa:
1. Kombinasi antara pengendali proporsional, integral, dan derivatif menghasilkan aksi pengendalian yang bagus dan handal karena ketiga mode tersebut dapat saling melengkapi kekurangan masing-masing. Pengendali PID dapat mengatasi perubahan beban dengan cepat dan baik.
2. Pengendali digital mudah dimodifikasi dan murah sehingga lebih menguntungkan dibandingkan dengan pengendali analog.
3. Penerapan pengendali PID digital pada PLC dapat dilakukan dengan mudah dan dapat dipilih berbagai macam waktu pencuplikan (sampling time) sesuai dengan kebutuhan. Namun sistem pewaktuan pada PLC Modicon TSX 3722 tidak betul-betul tepat sehingga pada kasus-kasus yang sangat sensitif (pada kasus ini adalah penghitungan kecepatan aktual motor) menimbulkan ketidakakuratan yang membuat sistem pengendalian tidak dapat betul-betul stabil.
4. Penalaan pengendali PID dengan metode Ziegler-Nichols yang dimodifikasi menghasilkan unjuk kerja pengendali yang baik.
5. Pengaturan kecepatan motor induksi tiga fase dapat dilakukan dengan mudah menggunakan inverter. Agar penelitian yang akan datang dapat menjadi lebih baik, penulis menyarankan:
1. Pengukuran kecepatan aktual motor dilakukan dengan alat yang lebih akurat sehingga sistem pada keadaan tunak dapat betul-betul stabil.
2. Untuk penalaan pengendali PID yang lebih mudah dan cepat maka pengendali PID dapat dikombinasi dengan sistem fuzzy-logic
Daftar Pustaka
[1] Anonim, Programming Manual Altivar 66, Groupe Schneider.
[2] Anonim, Reference Manual PL7 Micro/junior, version V1.2, Groupe Schneider. [3] Anonim, User’s Manual TSX Micro PLCs TSX 37-10/21/22, Groupe Schneider.
[4] Bateson, Robert, Introduction to Control System Technology, 6th ed., Prentice-Hall, Inc., New Jersey, 1999.
[5] Charles S. Siskind, Electrical Machines, McGraw-Hill Book Company Inc., USA, 1959. [6] E. Andrew Parr, Industrial Control Handbook 3 rd ed., Industrial Press Inc., New York, 1998. [7] Fitzgerald., Mesin-Mesin Listrik, Erlangga-Jakarta, 1990.
[8] S.A. Naser dan L.C. Unnewehr, Electromechanics and Electric Machines, John Wiley and Sons Inc., USA, 1979.
[9] Slemon, G.R., Electric Machines, Addison-Wesley Publishing Company, USA, 1982. [10] Vithayathil, Joseph., Power Electronics, Principles and Application, McGraw-Hill. Inc.