Penentuan Lokasi Objek . . . 49 PENENTUAN LOKASI OBJEK INDOOR DENGAN KEKUATAN
SINYAL YANG DITERIMA OLEH WIRELES LAN
1)
Taman Ginting, 2)Didik Warasto
1)Jursan Teknik Komputer Politeknik Pratama Mulia Surakarta 2)Jurusan Manajemen Informatika Politeknik Pratama Mulia Surakarta
ABSTRACT
Wireles lan technology advances have been very widely used as a medium of public communication and widely applied in a variety of places , ranging from campus , shops, offices and even public places . lan wireless technologies by leveraging the value of RSS ( received signal strength) obtained from the access point ( AP ) that already exist can be applied to estimate the location of objects in the room . These underlying factors to estimate the location of objects in the room with the fingerprint method .
This study focused on the use of RSS using 4 access points and the location of the research conducted on the 3rd floor of the building POLITAMA . Fingerprint data retrieval is done with a grid of 2 x 2 meters aiming to obtain high accuracy . Predicting the location of this object with methods of fingerprint algorithms using k - Nearest Neighbor ( kNN ) and Naïve Bayes .
From the results of the study showed that the effect of the study site to interference from walls and obstructions in the room is unbelievably disturbing than the power of RSS values obtained . The test results of the K - NN algorithm shows better than Naïve Bayes algorithm . Keywords - RSS , k - NN , Naive Bayes , Figerprint .
I. PENDAHULUAN
Jaringan tanpa kabel
(Wireless Network) berkembang
pesat yang telah di gunakan Oleh masyarakat di berbagai tempat. Perkembangan WLAN membuka peluang baru untuk layanan berbasis lokasi. Infrastruktur WLAN juga dapat diterapkan untuk memberikan layanan untuk mengetahui lokasi objek dalam
ruangan tanpa menggunakan peralatan tambahan. Salah satunya pada penelitian yang dilakukan lokalisasi dan pemetaan mengunakan pengukuran kekuatan sinyal.
Penentuan Lokasi Objek . . . 50
Fingerprinting Localisation
berbasis Received Signal
Strength (RSS) pada jaringan
WLAN dengan skala besar untuk menampilkan lokalisasi statis menggunakan Power Map (PM) yang diperbaharui menggunakan pendekatan base-station-strict
(BS-Strict) . WLAN memiliki
daya jangkau sinyal yang cukup besar terhadap penguna khususnya di dalam ruangan. Hal tersebut menjadi salah satu alasan untuk membangun system lokasi didalam gedung.
a. Perumusan masalah.
Kemajuan teknologi WLAN menyebakbkan penulis tertarik meneliti lokasi objek di dalam gedung. Berdasarkan latar belakang dan permasalahan di atas maka dapat ditarik perumusan masalah dalam penelitian ini yaitu :
1. Bagaimana menprediksi lokasi objek dalam gedung dengan teknologi Wireless LAN mengunakan metode
fingerprint.
2. Bagaimana performa algoritma K-NN, Naïve Bayes dan Decision tree terhadap akurasi objek dalam gedung.
b. Tujuan Penelitian
Tujuan penelitian yang ingin dicapai adalah sebagai berikut:
1. Mengetahui teknik untuk
memprediksi lokasi objek dalam gedung mengunakan metode
fingerprint.
2. Mengetahui performa perhitungan algoritma kNN, Naïve Bayes dan decision tree terhadap nilai RSS.
II. TINJAUN PUSTAKA
WLAN berbasis IEEE 802.11 merupakan standar jaringan nirkabel yang banyak digunakan pada masa sekarang ini, sehingga sangat menarik untuk digunakan pada lokalisasi dalam ruang . Lokalisasi berbasis RSS pada WLAN menghasilkan tingkat akurasi 3 hingga 30 m.
Pembandingan prisip pengukuran dan penggunaan algoritma posisi berdasarkan Triangulasi terdiri dari TOA, TDOA, Metode RSS-Based, RTOF, dan Metode POA, serta Metode Angulation yang terdiri dari AOA Estimasi. Berdasarkan Analisis Scene, dengan berbasis Radio Frequency menggunakan
FingerPrint dan penggunaan
metode Probabilistik, KNN, Jaringan Syaraf, SUM, dan SMP.
Penentuan Lokasi Objek . . . 51
kompleks. Isu yang paling menantang dari WLAN
Fingerprint adalah nilai RSS
WLAN yang tidak stabil tiap kali dilakukan pengukuran. Hal ini dikarenakan adanya efek
multipath (yang disebabkan oleh
refleksi, difraksi, dan difusi di ruangan-ruangan serta adanya
obstacle/hambatan). Efek
multipath dapat ditangani dengan
rata-rata [4] Teknik dan algoritma berbasis propagasi sinyal yang digunakan dalam lokalisasi dalam ruang. Menyatakan bahwa terdapat beberapa teknik utama lokalisasi dalam ruang, antara lain Triangulasi, Location
Fingerprinting dan Proximity [5].
Keuntungan menggunakan RSS untuk lokalisasi dalam gedung. Pertama, dapat diimplementasikan dalam sistem komunikasi nirkabel dengan penambahan perangkat keras yang digunakan atau cukup mengunakan pasilitas yang sudah tersedia. Namun yang diperlukan untuk mendapatkan dan membaca nilai RSS, Acces point yang tersedia, tidak memerlukan sinkronisasi antara pemancar dan penerima. Keuntungan ini merupakan faktor utama penggunaan nilai RSS untuk lokalisasi dalam gedung. Namun kelemahannya adalah adalah bahwa pembacaan nilai RSS dapat menunjukkan nilai yang bervariasi karena pengaruh
interferensi dan multipath
terhadap saluran radio[6].
a. Pengolahan Data
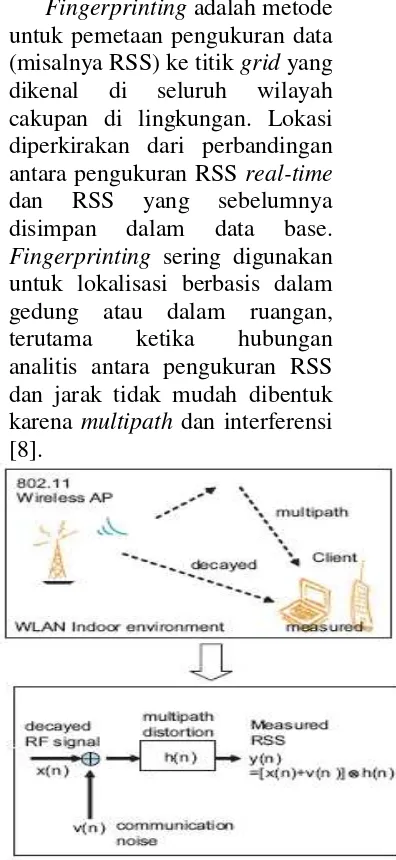
Fingerprinting adalah metode
untuk pemetaan pengukuran data (misalnya RSS) ke titik grid yang dikenal di seluruh wilayah cakupan di lingkungan. Lokasi diperkirakan dari perbandingan antara pengukuran RSS real-time
dan RSS yang sebelumnya disimpan dalam data base.
Fingerprinting sering digunakan
untuk lokalisasi berbasis dalam gedung atau dalam ruangan, terutama ketika hubungan analitis antara pengukuran RSS dan jarak tidak mudah dibentuk karena multipath dan interferensi [8].
Gambar 1. Metode Pengukuran RSS WLAN didalam ruangan
b. Fingerprint
Metode fingerprint untuk
Penentuan Lokasi Objek . . . 52
analysis biasanya digunakan
dalam gedung karena dibutuhkan karakteristik stasioner lingkungan misalnya atenuasi dinding. fingerprint biasanya bekerja dalam dua tahap: off-line
dan tahap online. Dalam tahap
off-line, kekuatan sinyal dari
Acces Poin (AP) dikumpulkan
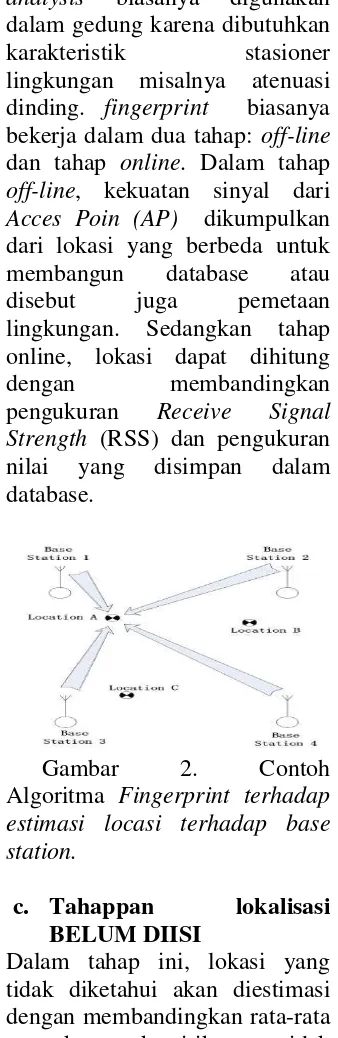
dari lokasi yang berbeda untuk membangun database atau disebut juga pemetaan lingkungan. Sedangkan tahap online, lokasi dapat dihitung dengan membandingkan pengukuran Receive Signal
Strength (RSS) dan pengukuran
nilai yang disimpan dalam database.
Gambar 2. Contoh Algoritma Fingerprint terhadap estimasi locasi terhadap base station.
c. Tahappan lokalisasi BELUM DIISI
Dalam tahap ini, lokasi yang tidak diketahui akan diestimasi dengan membandingkan rata-rata pengukuran ke titik yang tidak diketahui dengan database pada fase off-line. Perbandingan terbaik menunjukkan perkiraan
posisi. Dari algoritma yang berbeda diterapkan untuk tujuan Memprediksi lokasi objek. Hasil pengukuran RSS dari masing-masing Acces point bisa di rata-rata. Secara garis besar, lokalisasi berbasis RSS terdiri dari dua fase [9] yaitu:
1. Training phase, di mana peta nirkabel lingkungan ditentukan menggunakan pengukuran.
2. Positioning phase, di mana estimasi posisi ditentukan berdasarkan peta nirkabel.
Tahap Training
Di dalam basis data termasuk pengukuran Q fingerprinting dari semua sinyal Acces Point dituliskan sebagai vektor {RSSrq = [RSSr1 RSSSr2 ... RSSrP], r = 1, 2, ..., R, q = 1, 2, …, Q}.
Tahap Positioning
Membandingkan rata-rata pengukuran Q {rssq = [rss1 rss2 ... rssp], q = 1, 2, …, Q} ke titik yang tidak diketahui dengan basis data pada tahap training.
d. k-Nearest Neighbor (k-NN)
k-Nearest Neighbor (k-NN)
Penentuan Lokasi Objek . . . 53
memperkirakan lokasi yang sebenarnya, algorima ini sesuai dengan fingerprint. Algoritma k-NN dilakukan dengan cara menghitung jarak total semua variabel pada data test dengan semua data pada set data
training, dengan menggunakan
rumus euclidean. sampel ke i, j = indeks variable, P = jumlah variable. Y = data uji
e. Naïve Bayes
Naïve Bayes adalah suatu
probabilistik simpel yang berdasarkan pada teorema bayes pada umumnya, inferensi Bayes khususnya dengan asumsi independensi yang kuat (naive). Dalam melakukan klasifikasi data, Naïve Bayes
mengasumsikan bahwa ada atau tidak adanya suatu fitur pada suatu kelas tidak berhubungan dengan ada atau tidaknya fitur lain di kelas yang sama. Dasar dari teorema Naïve Bayes adalah rumus berikut ini:
adanya kejadian B ditentukan dari peluang kejadian B karenaadanya kejadian A, peluang kejadian A, dan peluang kejadian B. Teori peluang yang digunakan pada algoritma Naïve
Bayes untuk sistem klasifikasi
yang menggunakan propagasi sinyal adalah distribusi normal atau sering juga disebut Gaussian
Distribution.
Distribusi normal dapat dinyatakan dalam bentuk fungsi
kepadatan probabilitas
(probability density function)
dengan persamaan:
Besarnya standar deviasi dihitung dengan persamaan:
Sedangkan besarnya rata-rata (mean) dihitung menggunakan
persamaan:
Penentuan Lokasi Objek . . . 54 n
x
xi
Akurasi dapat juga dianggap sebagai besarnya penyimpangan dari sebuah sistem lokalisasi, sehingga jika penyimpangan semakin kecil maka sistem akan semakin baik.
Setelah diperoleh hasil dari peritungan algoritma maka dilakukan evaluasi dengan menghitung error jarak dari perkiraan posisi (x,y) pada proses pembelajaran dengan menggunakan rumus euclidean distance dan standar deviasi.
Error jarak =
√ (6)
Besarnya nilai akurasi secara keseluruhan diperoleh dengan menggunakan banyaknya data pengujian. Rumus standar deviasi yang digunakan :
SD =
(8)
III.METODOLOGI
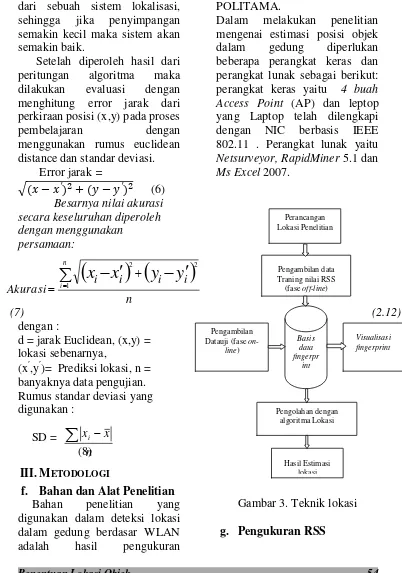
f. Bahan dan Alat Penelitian Bahan penelitian yang digunakan dalam deteksi lokasi dalam gedung berdasar WLAN adalah hasil pengukuran
kekuatan sinyal yang diterima oleh leptop di lantai 3 gedung POLITAMA.
Dalam melakukan penelitian mengenai estimasi posisi objek dalam gedung diperlukan beberapa perangkat keras dan perangkat lunak sebagai berikut: perangkat keras yaitu 4 buah
Access Point (AP) dan leptop
yang Laptop telah dilengkapi dengan NIC berbasis IEEE 802.11 . Perangkat lunak yaitu
Netsurveyor, RapidMiner 5.1 dan
Ms Excel 2007.
Gambar 3. Teknik lokasi
g. Pengukuran RSS Pengambilan
Datauji (fase on
-line)
Penentuan Lokasi Objek . . . 55
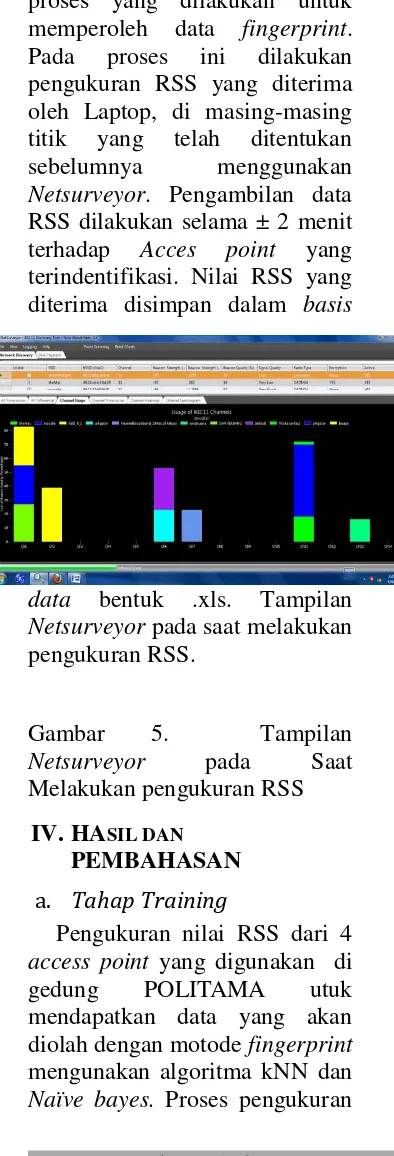
Pengukuran RSS merupakan proses yang dilakukan untuk memperoleh data fingerprint. Pada proses ini dilakukan pengukuran RSS yang diterima oleh Laptop, di masing-masing titik yang telah ditentukan sebelumnya menggunakan
Netsurveyor. Pengambilan data
RSS dilakukan selama ± 2 menit terhadap Acces point yang terindentifikasi. Nilai RSS yang diterima disimpan dalam basis
data bentuk .xls. Tampilan
Netsurveyor pada saat melakukan
pengukuran RSS.
Gambar 5. Tampilan
Netsurveyor pada Saat
Melakukan pengukuran RSS
IV. HASIL DAN PEMBAHASAN
a. Tahap Training
Pengukuran nilai RSS dari 4
access point yang digunakan di
gedung POLITAMA utuk mendapatkan data yang akan diolah dengan motode fingerprint
mengunakan algoritma kNN dan
Naïve bayes. Proses pengukuran
dilakukan dengan mengabaikan adanya efek multipath dan propagasi, dengan menetapkan
grid atau titik-titik pengukuran dalam bentuk koordinat (x,y) yang berukuran 2 meter x 2 meter. Pengukuran RSS dilakukan dengan menggunakan software NetSurveyor.
Pengukuran dilakukan pada titik tengah masing-masing grid.
Hasil seluruh rata-rata dari masing-masing grid yang telah ditetapkan nilai koordinatnya kemudian disimpan dalam
database fingerprint. Database
fingerprint di-import kedalam
program RapidMiner 5.0.
Database fingerprint ini
kemudian diolah untuk menghasilkan visualisasi
Konfigurasi yang dilakukan pada pengujian pertama ini memperoleh visualisai dan hasil dari fase off-line dan fase on-line
seperti berikut : Fase off-line
Dalam fase off-line ini menghasilkan visualisasi
fingerprint seperti pada gambar
dibawah . Dari hasil pengukuran RSS terhadap 4 Access Point
yang terpasang di dalam lokasi penelitian. Kemudian diolah ke dalam microsoft excel dalam format csv dengan atribut AP1, AP2, AP3 dan AP4 klasifikasi berdasarkan koordinat (x,y) yang digunakan sebagai acuan untuk penentuan posisi objek. Data di
Penentuan Lokasi Objek . . . 56
RapidMiner 5.1 untuk dibuat
visualisasi peta fingerprint.
Visualisasi peta fingerprint pada
lokasi penelitian adalah sebagai berikut:
Gambar 4.1 Visualisasi peta fingerprint pada posisi AP di tengah koridor
Fase On- line
Pada fase on- line, dilakukan pengujian terhadap nilai RSS yang diukur secara real time
dengan cara berjalan. Nilai
RSS real time tersebut
disimpan dalam basis data
yang kemudian akan dilakukan proses perhitungan estimasi
posisi dengan menggunakan algoritma k-NN dan Naive
Bayes.
Grafik perbandingan error jarak estimasi lokasi target antara algoritma k-NN dan Naïve Bayes
fase on-line adalah sebagai berikut :
Gambar 4. 9 Perbandingan Error perhitungan Fase On-line Algoritma k-NN dan Naïve bayes.
Tabel 4.8. Hasi dari pengolahan data RSS fase on-line
Keterangan
Naïve Bayes
kNN k=1 Rata-Rata
Kesalahan Jarak
Estimasi 4,20 3,76 Standar Deviasi 7,11 6,01
0.00 1.00 2.00 3.00 4.00 5.00 6.00 7.00 8.00
Naïve Bayes
kNN k=9
Rata-Rata Kesalahan Jarak Estimasi
Penentuan Lokasi Objek . . . 57
Kesalahan jarak yang dihasikan dari fase on-line pada
masing-masing algoritma dengan real-time adalah sebagai berikut:
Gambar 4.2. Error jarak etimasi fase on-line Algoritma k-NN k =1
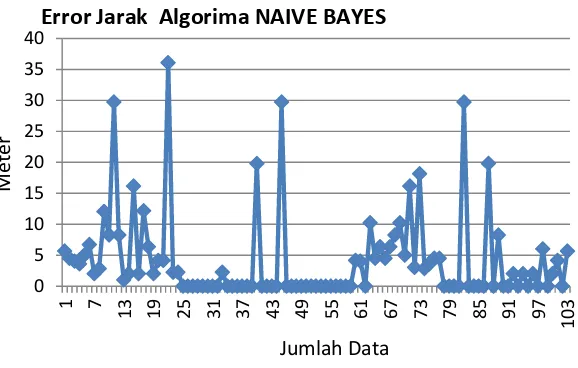
Gambar 4.3. Error jarak etimasi fase on-line Algoritma Naive Bayes
V. KESIMPULAN DAN SARAN Dari hasil penelitian yang telah dilakukan dapat disimpulkan bahwa memprediksi lokasi objek dalam gedung dapat dilakukan dengan memanfaatkan teknologi Wireless LAN berbasis IEEE
802.11. mengunakan metode
fingerprint.
1. Fingerprint RSS mengalami
penyebaran nilai kekuatan sinyal yang berbeda hal ini disebakan oleh waktu dan kondisi lingkungan pengukuran yang berbeda.
0 10 20 30 40 50 60
1 7
13 19 25 31 37 43 49 55 61 67 73 79 85 91 97 103
Error Jarak Algorima K-NN
Jumlah Data
M
et
er
0 5 10 15 20 25 30 35 40
1 7 13 19 25 31 37 43 49 55 61 67 73 79 85 91 97
10
3
Error Jarak Algorima NAIVE BAYES
Jumlah Data
M
et
Penentuan Lokasi Objek . . . 58
2. Tingkat keakurasian dari penelitian ini member kontribusi dengan algoritma K-NN lebih baik disbanding dengan Algoritma Naïve Bayes .
3. Tingkat akurasi yang dihasilkan dari sistem estimasi lokasi objek berbasis RSS
fingerprint meberikakan
tingkat akurasi yang tinggi.
DAFTAR PUSTAKA
Wilson, M. Y., et al, 2007,
Wireless Lan Positioning
Based On Received Signal Strength From Mobile Device And Access Points, 13th IEEE International Conference on Embedded and Real-Time Computing Systems and Applications (RTCSA 2007),
Bshara. Mussa, G. Fredrik, V.B. Leo, Fingerprinting Localization in Wireless Networks Based on Received-Signal-Strength Measurements: A Case Study on WiMAX Networks, in: IEEE Transactions on Vehicular Technology, Vol 59 No. 1, Jan. 2010.
Hui, L., et al, 2007, Survey of Wireless Indoor Positioning Techniques and Systems, IEEE
Transactions On Systems, Man, And Cybernetics— Part C: Applications And Reviews, Vol. 37, No. 6 Yongguang Chen and Hisashi
Kobayashi, "Signal Strength Based Indoor Geolocation," IEEE, vol. -, pp. 436-439, 2002
A. Kupper, "Location Based Services : Fundamentals and Operations," -, 2005. Li B, "Terrestrial Mobile User
Positioning Using TDOA and fingerprinting Techniques," Sydney, 2006.
Widyawan, "Learning Data Fusion for Indoor Localization," Departement of Electronic Engineering Cork Institute of Technology, Ph.D. dissertation 2009.
X. Li, and J. Makela K. Pahlavan, "Indoor Geolocation Science and Technology," IEEE Communications
Magazine, vol. 40, no. 2,
pp. 112-118, Feb 2002 Gunadi, Teknologi Wireless LAN
dan Aplikasinya. Jakarta: