LANDASAN TEORI
2.1 Teori Dasar Citra Digital
2.1.1 Pengertian Citra Digital secara Matematis
Suatu citra yang merupakan matriks dua dimensi terdiri dari sekumpulan elemen-elemen citra yang disebut piksel. Kumpulan piksel yang jumlahnya N<∞ dinyatakan dengan notasi S, dan tiap piksel diberi indeks i. Setiap piksel i memiliki intensitas atau derajat keabuan θi. dimana derajat keabuan ini mendefinisikan state piksel
i. Dengan demikian, citra asli dapat ditulis dengan notasi Ө = { θi : I ε S}, dan citra dengan noise adalah X = {xi : I ε S }.
2.1.2 Pengertian Gambar Digital secara stokastik
Menurut Murthy, Janani dan Priya (p4,2006), Secara stokastik, citra digital dapat dianggap sebagai sekumpulan variabel acak {θi : i ε S}2. Sebagai contoh, N Piksels dilukis dengan tingkat keabuan,{0,1,….,Q-1}. Tingkat keabuan 0 melambangkan hitam dan tingkat keabuan Q-1 adalah putih. Setiap piksel memiliki Q tingkat keabuan. Sekumpulan citra digital dalam satu kelompok, yang dinotasikan sebagai Ω, disebut sebagai state space, Di mana dalam hal ini, θ (citra yang direstorasi), dan X (citra tergradasi) . Dengan kata lain dapat dikatakan juga bahwa Ω = Qn.
Secara stokastik suatu citra terdegradasi X{Xi : i ε S} memiliki 2 komponen yakni:
- Komponen stokastik yang terdegradasi oleh noise.
2.2 Degradasi Citra Digital
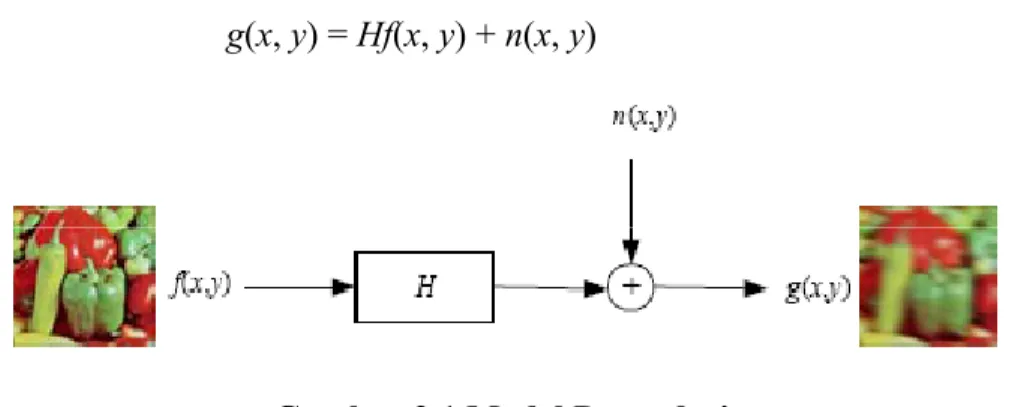
Citra yang tertangkap oleh alat-alat optik seperti mata, kamera, dan sebagainya sebenarnya merupakan citra yang sudah mengalami degradasi. Gambar 2.1 memperlihatkan model degradasi yang dalam hal ini jika f(x, y) adalah citra asli dan g(x, y) adalah citra terdegradasi, maka g(x, y) adalah perkalian f(x, y) dengan operator distorsi H ditambah dengan noise aditif n(x, y):
g(x, y) = Hf(x, y) + n(x, y) (2.1)
Gambar 2.1 Model Degradasi
Noise n(x, y) adalah sinyal aditif yang timbul selama akuisisi citra sehingga menyebabkan citra menjadi rusak (mengalami degradasi). (Catatan: Citra f(x, y) sebenarnya tidak ada; citra f(x, y) adalah citra yang diperoleh dari akuisisi citra pada kondisi sempurna). Perhatikan bahwa model ini mengasumsikan bahwa degradasi invarian secara spasial sehingga dapat dipandang sebagai penapis lanjar (linier) dan sinyal aditif . Secara ringkas, persamaan (1) dapat ditulis sebagai bentuk matriks-vektor G = H f + n.
2 2/2 ) ( 2 1 ) ( μ σ σ π − − = e z z p 2.3 Noise
Sumber utama terjadinya noise di gambar digital timbul selama pengambilan gambar atau transmisi. Kinerja sensor gambar dipengaruhi oleh beberapa faktor, seperti kondisi lingkungan selama akuisisi gambar, dan kualitas elemen sensornya sendiri. Sebagai contoh, dalam pengambilan gambar dengan kamera CCD, tingkat cahaya dan temperatur sensor merupakan faktor utama yang mempengaruhi jumlah noise yang timbul dalam hasil gambar. Gambar dapat menjadi rusak selama transmisi karena gangguan dalam sambungan yang digunakan untuk transmisi. Sebagai contoh, sebuah gambar yang ditransmisikan dengan sambungan wireless bisa rusak karena petir atau gangguan atmosfer lainnya.
2.3.1 Jenis – jenis Noise
Sifat-sifat noise ditunjukkan oleh parameter-parameter yang mendefinisikan karakteristik spasial dari noise, dan apakah kemunculan noise berkaitan dengan citra atau tidak. Dalam hal ini, diasumsikan bahwa noise bersifat “tidak tergantung” pada koordinat spasial, dan tidak ada korelasi antara nilai piksel dengan nilai komponen noise. Pada domain frekuensi, sifat-sifat noise ditunjukkan oleh komponen frekuensi pada hasil transformasi Fourier.
Berdasarkan bentuk dan karakteristiknya, terdapat beberapa jenis noise yang di antaranya adalah:
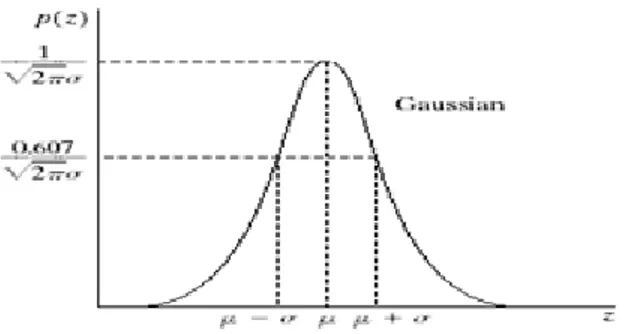
a. Noise Gaussian
Probability density function (PDF) dari variabel random Gaussian, z, is dinyatakan dengan :
(2.2) z menyatakan tingkat keabuan, μ menyatakan rata-rata dari z, dan σ adalah deviasi standard. Pangkat dua dari deviasi standard disebut variance dari z.
Gambar 2.2 Noise Gaussian
b. White Noise
Salah satu model noise yang paling populer adalah white noise. Menurut Chan dan Shen (2005, p150) white noise adalah sinyal stokastik stasioner n(t) dengan nilai rata-rata nol yang power spectral density (distribusi energi sinyal per unit waktu dalam domain frekuensi)- nya Snn(ω) adalah sebuah konstanta σ2 pada seluruh spektrum : ω _ R. Secara lebih umum, sinyal demikian disebut bandlimited white noise jika Snn(ω) adalah konstan pada beberapa pita spektrum, dan bernilai 0 jika di luar pita spektrum tersebut. Lebih mudah untuk pertama-tama mengerti tentang white noise diskrit. Misalkan v(k), ω _ Z, adalah white noise, yang rangkaian autokorelasinya didefinisikan sebagai berikut.
R(m) = Rnn(m) = E[n(k)n(k + m)], m _ Z. (2.3) fungsi power spectral density Snn(ω) ≡ σ2, berarti sama dengan meminta
Hal ini berarti untuk setiap hambatan m bukan nol, n(k) dan n(k + m) sebagai 2 variabel acak selalu tidak berkorelasi. Hal ini terjadi secara otomatis jika keduanya independen (karena rata-ratanya dianggap nol). Sebuah white noise v(k) disebut Gaussian bila distribusi marginal bersifat Gaussian. Seperti telah diketahui dengan baik dalam teori probabilitas, untuk dua variabel Gaussian yang rata-ratanya nol, tidak berkorelasi sama artinya dengan independen. Gaussian white noise mungkin adalah model noise paling populer dalam banyak area pemrosesan citra.
c. Noise Impulse (Salt and Pepper)
PDF noise impulse (bipolar) dinyatakan dengan :
(2.5)
Jika b > a, tingkat keabuan b akan muncul sebagai titik terang dalam citra. Sebaliknya, a akan muncul sebagai titik gelap.
Jika Pa atau Pb nol, noise impulse disebut unipolar.
Jika tak satupun probabilitas bernilai nol, khususnya jika keduanya bernilai hampir sama, nilai-nilai noise impulse akan memunculkan butir-butir garam dan merica (salt-and-pepper) yang terdistribusi random pada citra. Karena alasan inilah, noise impulse bipolar disebut juga noise salt-and-pepper . Karena intensitas impulse biasanya lebih besar dibanding intensitas piksel-piksel citra, maka noise impulse didigitisasi sebagai nilai ekstrim (hitam atau putih) dalam citra. ⎪ ⎩ ⎪ ⎨ ⎧ = = = otherwise b z for P a z for P z p b a 0 ) (
2 p M s t a 2 m 2.3.2 Mea MSE pemrosesan MSE mengg sementara S terdegradasi adalah citra SNR Dan 2.4 Mark Mark melakukan s n Square Er E dan SNR a citra digital gambarkan SNR mengga i. Jika M da yang terdegr R dapat dihitu MSE dihitun 1/MN kov Chain M kov Chain sampling dar Gamb rror (MSE) adalah dua p l untuk meng seberapa be ambarkan se an N adalah radasi, sedan ung dengan r ng dengan c N * Monte Carlo Monte Car ri distribusi p bar 2.3 Nois dan Signal-parameter ya gukur sebera esar tingkat eberapa deka h dimensi p ngkan f(x,y) rumus sebag ara: o rlo (MCMC probabilitas se Impulse -to-Noise Ra ang paling se apa jauh per kesalahan d at suatu citra panjang dan ) adalah citra gai berikut: C) adalah su dengan mem atio (SNR) ering diguna rbedaan anta dari suatu c a dengan citr lebar citra, a yang bersih uatu kelas mbangun ran akan dalam d ara citra dig itra terdegra ra asli yang , dan f-cap h. ( algoritma u ntai Markov dunia gital . adasi, tidak (x,y) (2.6) (2.7) untuk pada
suatu distribusi tertentu yang stasioner. Salah satu jenis Algoritma MCMC adalah Algoritma Metropolis-Hastings. Algoritma Metropolis-Hastings merupakan algoritma untuk membangkitkan barisan sampel menggunakan mekanisme penerimaan dan penolakan (accept-reject) dari suatu distribusi probabilitas yang sulit untuk dilakukan penarikan sampel.
Proses stokastik X(t) adalah aturan untuk menentukan fungsi X(t, ξ) untuk setiap ξ. Jadi proses stokastik adalah keluarga fungsi waktu yang tergantung pada parameter ξ atau secara ekivalen fungsi t dan ξ. X(t) adalah proses keadaan diskret bila harga-harganya bulat. Bila tidak demikian X(t) adalah proses kontinu.
Pada tahun 1906, A.A. Markov seorang ahli matematika dari Rusia yang merupakan murid Chebysev mengemukakan teori ketergantungan variabel acak proses acak yang dikenal dengan proses Markov. Proses Markov adalah proses stokastik masa lalu tidak mempunyai pengaruh pada masa yang akan datang bila masa sekarang diketahui.
Bila tn-1<tn maka :
P{X(tn) ≤ Xn X(t), t ≤ tn-1} = P { X(tn) ≤ Xn X(tn-1)} (2.8) Bila t1<t2<…….<tn maka :
P { X(tn) ≤ Xn X(tn-1),…….X(t1)} = P { X(tn) ≤ Xn X(tn-1)} Definisi di atas berlaku juga untuk waktu diskret bila X(tn) diganti Xn. Sifat umum dari proses Markov adalah :
a. f(Xn Xn-1,……,X1) = f(Xn Xn-1) b. E{ Xn Xn-1,……,X1} = E{ Xn Xn-1}
f(Xn Xn+1,……,Xn+k) = f(Xn Xn+1)
d. Bila keadaan sekarang diketahui, masa lalu independen dengan masa akan datang, bila k<m<n maka :
f(Xn,Xk Xm) = f(Xn Xm) f(Xk Xm)
2.4.1 Rantai Markov
Menurut Zhu, Delaert, dan Tu(p4,2005) Rantai Markov adalah model matematis bagi sistem stokastik yang state-nya, baik diskrit maupun kontinyu, diatur oleh probabilitas transisi. State sekarang dalam suatu rantai Markov hanya tergantung pada tepat satu state sebelumnya, digambarkan sebagai berikut:
P{Xn+1 = j | Xn = i, Xn-1 = in-1, .... ,X1 = i1;X0 = i0} = P(Xn+1 = j | Xn = i) = Pij (2.9)
Ada beberapa hal yang perlu diperhatikan: a. Rantai X dikatakan homogen jika:
P(Xn+1 = j | Xn = i) = P(X1 = j | X0 = i)
untuk semua n, i, j di N. Matriks transisi P = (Pij) adalah matriks |S| x|S|
probabilitas transisi Pij = P(Xn+1 = j | Xn = i)
b. Suatu state i disebut memiliki periode d jika = 0 untuk semua n yang tidak habis dibagi d, dan d adalah bilangan bulat terbesar yang memenuhi sifat ini. Dengan kata lain, suatu state i disebut memiliki periode d jika d adalah persekutuan pembagi terbesar (the greatest common divisor(gcd)) bagi n sehingga > 0. Suatu state dengan periode sama dengan satu disebut aperiodik, sedangkan state dengan periode ≥ 2 disebut periodik.
c. Suatu state disebut berulang positif (Positive Recurrent) jika state tersebut adalah berulang (recurrent) serta berlaku: jika proses dimulai dari state i maka nilai harapan dari waktu sampai proses tersebut kembali ke state i adalah bilangan hingga (finite). state recurrent yang tidak positive recurrent disebut null recurrent.
d. Rantai Markov dikatakan tak-tereduksi jika hanya terdapat satu kelas state, yaitu jika semua state berhubungan satu dengan yang lainnya.
e. Rantai Markov dengan state positive recurrent dan aperiodik disebut ergodik. Untuk rantai Markov ergodik (positive reccurent, aperiodik, dan tak tereduksi) ada dan nilainya tidak tergantung dari i.
πj adalah solusi unik non negatif dari (2.10)
Andaikan bahwa adalah rantai Markov dengan matriks transisi P, π adalah distribusi stasioner tunggal, dan untuk semua n, Xn didistribusikan sebagai π. M adalah reversibel jika dan hanya jika
πiPij = π Pji untuk semua i,j S (2.11)
keadaan ini sering disebut kondisi setimbang yang terperinci (detailed balanced condition).
2.4.2 Monte Carlo
Metode Monte Carlo adalah algoritma komputasi untuk mensimulasikan berbagai perilaku sistem fisika dan matematika. Penggunaan klasik metode ini adalah untuk mengevaluasi integral definit, terutama integral multidimensi dengan syarat dan
batasan yang rumit. Metode ini terbukti efisien dalam memecahkan persamaan diferensial integral medan radians, sehingga metode ini digunakan dalam perhitungan iluminasi global yang menghasilkan gambar-gambar fotorealistik model tiga dimensi, dimana diterapkan dalam video games, arsitektur, perancangan, film yang dihasilkan oleh komputer, efek-efek khusus dalam film, bisnis, ekonomi, dan bidang lainnya. Algoritma Monte Carlo adalah metode Monte Carlo numerik yang digunakan untuk menemukan solusi problem matematis (yang dapat terdiri dari banyak variabel) yang susah dipecahkan, misalnya dengan kalkulus integral, atau metode numerik lainnya.
2.4.3 Markov Chain Monte Carlo
Markov Chain Monte Carlo adalah ide penggunaan simulasi X1, . . ., Xn dari rantai markov untuk mendekati harapan
(2.12) Dengan sampel rata-rata
(2.13)
di mana π adalah keseimbangan distribusi, yang disebut juga distribusi invarian, distribusi tetap, atau batas ergodic dari rantai Markov.
Markov Chain Monte Carlo pertama kali dipopulerkan oleh Metropolis pada tahun 1953. Metropolis menemukan bahwa proses markov dengan batas ergodic yang sama dapat memberikan hasil yang baik. Karena itu, dia mengembangkan sebuah algoritma sederhana untuk menyusun rantai markov yang mempunyai distribusi yang seimbang.
2.4.3.1 Metropolis – Hastings
Algoritma Metropolis-Hastings berguna untuk membangkitkan barisan sampel dari suatu distribusi probabilitas yang sulit untuk dilakukan penarikan sampel dengan menggunakan mekanisme penerimaan dan penolakan. Barisan ini dapat digunakan untuk mengaproksimasi distribusi dengan histogram, atau untuk menghitung integral.
Algoritma Metropolis-Hastings bisa ditulis sebagai berikut: Dimulai dengan sebarang X0, pada setiap iterasi n = 1,....,N
a. Ambil sampel j ~ qij Q = {qij}
b. Bangkitkan U ~ (0, 1) dimana distribusi seragam pada (0; 1) c. Dengan probabilitas
(2.14)
atur
Gambar 2.4 dan 2.5 berikut akan menunjukkan histogram dari sampling dengan Algoritma M-H :
Gambar 2.5 Histogram hasil simulasi N (0, 1), dengan N=10000 dan a=1
2.5 Metodologi Bayesian
Dalam algoritma image processing, semuanya dimulai dengan inisial citra Ө 0. Pilihan yang tepat adalah Ө 0 = X, yaitu citra yang diberi noise. Lalu akan menghasilkan rantai dari citra
Ө 0 → 1 → 2 · · · → n → n+1 (2.13) Dengan sebuah algoritma dan berharap ada statistik yang sesuai untuk pengolahan citra dalam rantai untuk memperkirakan gambar asli dengan baik. Dalam pembangunan rantai citra, harus dimasukkan metodologi Bayesian.
Komponen utama dalam Metodologi Bayesian adalah Likelihood yang merupakan model degradasi ke X. Komponen kedua adalah distribusi priori, yang disebut juga Prior dan dinotasikan dengan π(Ө). Prior adalah sebuah distribusi dari tingkat keabuan di S. Pemilihan dari Prior bresifat subjektif. Komponen ketiga adalah distribusi Posteriori yang dinotasikan dengan simbol π(Ө |X). Posterior adalah distribusi yang tergantung dengan kondisi.
2.5.1 Distribusi Priori Bayesian dan Energi
Seperti yang telah dijelaskan sebelumnya, pilihan dari sebuah prior di metodologi bayesian adalah subjektif. Prior harus bisa merepresentasikan citra yang bersih seperti yang terlihat. Orang-orang mengharapkan citra yang halus. Ada tidaknya proses penghalusan bisa dilihat dari selisih tingkat keabuannya. Semakin kecil perbedaan antara tingkat keabuannya maka semakin halus ikatannya.
Ada interaksi energi yang terjadi diantara dua piksel yaitu piksel yang saling bersebelahan. Letak dari pasangan i,j dari piksel yang bersebelahan berinteraksi dengan energi yang dinotasikan Ei,j. Definisikan energi dari gambar sebagai,
E(Ө)=∑ , Ei, j Ө (2.16)
Simbol (i,j) menyatakan piksel i dan j yang saling bersebelahan dan jumlahnya menggantikan semua pasangan piksel yang bersebelahan di bidang gambar. Dimodelkan Ei,j dalam cara ini yang berarti kecil ketika tingkat keabuan mendekati satu sama lain dan besar ketika tingkat keabuannya berbeda dalam jumlah yang besar. Lalu, gambar yang halus memiliki energi yang lebih kecil. Didefinisikan prior seperti
π(Ө) =
βexp[−βpE(Ө)] (2.17)
dimana βp = 1/T dan T adalah parameter kehalusan yang disebut temperatur prior. Z(βp) adalah konstanta normalisasi yang diberikan sebagai berikut:
Z(βp)=∑Өexp βpE Ө (2.18) Prior, seperti yang didefinisikan diatas, disebut distribusi Gibbs.
2.5.1.1 Distribusi Maxwell – Boltzmann
Distribusi statistik Maxwell-boltzmann menggunakan pandangan klasik, dimana sesuai dengan asumsi :
1. Partikel penyusun dapat dibedakan
2. Dalam satu keadaan energy dapat diisi oleh lebih dari satu partikel
Fungsi distribusi Boltzmann didapatkan secara langsung dari analisis pengembangan dari sebuah sistem. Selama energinya bebas untuk mengalir antara sistem dan partikel, partikelnya akan mempunyai kapasitas panas yang besar untuk memperbaiki temperatur konstan, T, untuk sistem yang dikombinasikan. Dalam konteks ini, sistem diasumsikan memiliki tingkat energi εi dengan degenerasi gi. Seperti sebelumnya, probabilitas akan
dihitung dari sistem yang memiliki energi εi.
Jika sistem ada dalam state S1, maka akan ada angka sesuai dari microstate yang tersedia kedalam partikel. Anggap angka itu . Asumsikan, kombinasi sistem di isolasi, jadi semua microstate akan memiliki kemungkinan yang sama besar. Maka, singkatnya jika , dapat di simpulkan bahwa sistem yang ada dua kali lebih besar di state S1 daripada S2. Umumnya, P(Si) adalah probabilitas sistem berada di state Si.
(2.19) Karena entropi dari partikel , pernyataan diatas menjadi
(2.20) Selanjutnya ada yang disebut identitas thermodinamika ( dari hukum pertama thermodinamika) :
(2.21) Dalam canonical ensemble, tidak ada pertukaran partikel, jadi nilai dNR adalah 0.
Persamaan, dVR = 0. Hasilnya :
(2.22)
dimana and menyatakan energi dari partikel dan sistem di Si,. Untuk persamaan kedua, kita memakai konservasi energi. Substitusi kedalam persamaan pertama yang berhubungan dengan :
(2.23) Yang mengimplikasikan, untuk setiap state s dari sistem
(2.24) dimana Z merupakan konstanta terpilih yang sesuai untuk menghitung jumlah probabilitas. (Z merupakan konstanta yang muncul bila tempertatur T invarian). Maka dapat dikatakan:
(2.25) dimana index s melalui semua microstate dari sistem. Z dapat disebut jumlah Boltzmann dari banyak state. Probabilitas sistem yang memiliki energi εi adalah penjumlahan
semua kemungkinan dari microstate yang sesuai :
Dengan modifikasi yang jelas :
(2.27)
2.5.1.2 Model Gemen-McClure Untuk Distribusi Prior
Gemen dan McClure dalam merekomendasikan Prior dimana energi interaksi antara 2 piksel yang bersebelahan dinyatakan sebagai berikut:
(2.28) Dimana C merupakan hyper-parameter yang menentukan lebar distribusi. Nilai dari rentang Ei,j(Ө) dimulai dari minimum -1 saat | θi – θj | = 0 sampai maksimum 0 saat | θi
– θj | Æ∞. Interaksi potensial Gemen-McClure ditunjukkan dalam gambar 2.6 untuk C =
0.1, 1.0, dan 10.0. Fungsi Ei,j(Ө) simetris saat | θi – θj | = 0 dan lebarnya berkurang
dengan meningkatnya C. Gemen-McClure Prior dituliskan sebagai berikut:
(2.29) Dimana:
Z(βp) : fungsi partisi yang menormalisasi Prior, βp : 1/T
2 d D e m D Gambar 2 2.5.1.3 Mod Mod dan j adalah Dari rumus energi intera memiliki en Ising Dimana: Z(βp) : fung βp : 1/T 2.6 Energi G sa
del Ising unt del Ising men
:
ini jelas ba aksi 0. Atau ergi 0, sedan g Prior dapat
gsi partisi yan
Gemen-McC aat C menin tuk Distribu nyatakan bah E( ahwa piksel u dengan kat ngkan state y t dituliskan s ng menorma Clure Ei,j da ngkat, lebar usi Prior hwa energi in ) =I(θi≠ θj)= dengan ting ta lain, grou yang tereksit sebagai berik alisasi Prior alam | θi – θj r fungsi men nteraksi di a = θi – θj gkat keabua und-state dar tasi memilik kut: j | untuk C = nurun. antara 2 piks an yang sam ri sistem 2 p ki energi unit = 0.1, 1.0, 10 el yang berb ( ma akan mem piksel berdek t. ( 0.0; beda i 2.30) miliki katan (2.31)
T : nilai penghalusan yang ditentukan secara subjektif
2.5.2 Distribusi Posteriori Bayesian
Distribusi Posterior dalam metodologi Bayesian diberikan dengan hasil dari Likelihood dan prior. Ini yang disebut dengan teorema Bayes yang dinyatakan sebagai berikut:
π(Ө|X) =
| Ө Ө∑ | Ө Ө
(2.32) Dimana ∑ |Ө Ө adalah konstanta normalisasi (Z) dari distribusi Bayesian itu sendiri. Nilai Z sendiri tidak tergantung pada .
2.6 Rapid Application Development
Rapid Aplication Development (RAD) adalah sebuah model proses perkembangan software sekuensial linier yang menekankan siklus perkembangan yang sangat pendek. Model RAD ini merupakan sebuah adaptasi “kecepatan tinggi” dari model sekuensial linier di mana perkembangan cepat dicapai dengan menggunakan pendekatan kontruksi berbasis komponen. Jika kebutuhan dipahami dengan baik, proses RAD memungkinkan tim pengembangan menciptakan “sistem fungsional yang utuh” dalam periode waktu yang sangat pendek. Karena dipakai terutama pada aplikasi sistem konstruksi, pendekatan RAD melingkupi fase – fase sebagai berikut :
1. Business modeling
Aliran informasi di antara fungsi – fungsi bisnis dimodelkan dengan suatu cara untuk menjawab pertanyaan – pertanyaan berikut : informasi apa yang mengendalikan proses
bisnis? Informasi apa yang di munculkan? Siapa yang memunculkanya? Ke mana informasi itu pergi? Siapa yang memprosesnya?
2. Data modeling
Aliran informasi yang didefinisikan sebagai bagian dari fase business modelling disaring ke dalam serangkaian objek data yang dibutuhkan untuk menopang bisnis tersebut. Karakteristik (disebut atribut) masing – masing objek diidentifikasi dan hubungan antara objek – objek tersebut didefinisikan.
3. Proses modeling
Aliran informasi yang didefinisikan di dalam fase data modeling ditransformasikan untuk mencapai aliran informasi yang perlu bagi implementasi sebuah fungsi bisnis. Gambaran pemrosesan diciptakan untuk menambah, memodifikasi, menghapus, atau mendapatkan kembali sebuah objek data.
4. Application Generation
RAD mengasumsikan pemakaian teknik generasi ke empat. Selain menciptakan perangkat lunak dengan menggunakan bahasa pemrograman generasi ketiga yang konvensional, RAD lebih banyak memproses kerja untuk memkai lagi komponen program yang ada ( pada saat memungkinkan) atau menciptakan komponen yang bisa dipakai lagi (bila perlu). Pada semua kasus, alat – alat bantu otomatis dipakai untuk memfasilitasi konstruksi perangkat lunak.
5. Testing and turnover
Karena proses RAD menekankan pada pemakaian kembali, banyak komponen program telah diuji. Hal ini mengurangi keseluruhan waktu pengujian. Tetapi komponen baru harus di uji dan semua interface harus dilatih secara penuh.