i
KATA PENGANTAR
Dalam memenuhi kemampuan dalam bidang desain kapal, maka peningkatkan mutu pendidikan di Jurusan Teknik Perkapalan Fakultas Teknologi Kelautan dituangkan di dalam kurikulum, dan dilaksanakan secara bertahap dan berkesinambungan pada berbagai komponen pendidikan.
Komponen pendidikan dalam bidang desain kapal yang dikembangkan saat ini diantaranya adalah materi kuliah.
Diktat ini merupakan bagian dari satu paket pembelajaran kepada siswa untuk dapat memahami dan terampil melaksanakan pekerjaan yang telah dipelajari dalam diktat ini serta siap untuk mempelajari paket diktat berikutnya, dengan kata lain siswa didik telah memiliki satu kompetensi sebagai hasil pembelajaran dari diktat ini.
Diktat ini berisi materi pembelayaran tentang dasar teori untuk menghitung kekuatan memanjang kapal, seiring dengan desain konstruksi yang rancang untuk sebuah kapal. Sebagai dasar teori, maka peserta didik diberikan landasan untuk mengembangkan diri sesuai dengan kebutuhan desain.
Segala masukan, kritik dan saran akan kami terima dengan tangan terbuka, guna penyempurnaan secara terus menerus diktat ini, untuk pemperoleh hasil yang maksimal bagi siswa didik kita selanjutnya.
Surabaya, September 2013 Penyusun
ii
DAFTAR ISI
KATA PENGANTAR ... i
DAFTAR ISI ... ii
DAFTAR GAMBAR ... v
DAFTAR TABEL ... viii
BAB 1 PENDAHULUAN ... 1
1.1 UMUM ... 1
1.1.1 Beban-beban pada kapal ... 1
1.1.2 Sifat-Sifat Umum Respons Konstruksi Kapal Terhadap Beban. ... 2
1.1.3 Pembebanan Pada Tahap Pembuatan. ... 3
1.1.4 Pembebanan Uji ... 4
1.1.5 Pembagian Kategori Kapal Menurut BKI ... 4
1.2 PEMBEBANAN PADA KAPAL ... 5
1.2.1 Penyebaran Memanjang Gaya Berat. ... 5
1.2.2 Penyebaran Memanjang Gaya Tekan Keatas. ... 8
BAB 2 KOMBINASI VERTICAL DAN HORIZONTAL BENDING MOMENT 10 2.1 KAPAL DALAM KEADAAN MIRING ... 11
2.2 KAPAL MENGALAMI LENGKUNGAN ... 12
2.3 KAPAL MENGALAMI PUNTIRAN ... 16
2.3.1 Umum ... 16
2.3.2 Rumus Puntiran ... 16
2.3.3 PUNTIRAN PADA KAPAL ... 20
BAB 3 PERHITUNGAN MOMEN LENGKUNG DAN GAYA LINTANG ... 23
3.1 PERSAMAAN DASAR ... 23
3.2 KOREKSI MOMEN UNTUK KAPAL DI AIR TENANG ... 29
3.3 PERHITUNGAN INTEGRAL SECARA NUMERIK. ... 31
3.4 PERHITUNGAN GAYA LINTANG DAN MOMEN LENGKUNG SECARA NUMERIK ... 32
3.4.1 Perhitungan penyebaran gaya lintang Q(x) : ... 32
3.4.2 Perhitungan penyebaran momen lengkung M(x) : ... 33
3.4.3 Tabel Untuk Koreksi Linier ... 35
3.5 PENYUSUNAN TABEL PERHITUNGAN SUDUT LENTUR DAN LENTURAN ... 36
3.5.1 Perhitungan suku pertama penyebaran sudut lentur : ... 36
iii
3.6 PENYEBARAN BEBAN DAN PENGGANTIAN BEBAN. ... 39
3.6.1 Penyebaran beban; ... 40
3.6.2 Penggantian beban; ... 41
BAB 4 LEBAR EFEKTIF ... 42
4.1 DEFINISI LEBAR EFEKTIF. ... 42
4.2 LEBAR EFEKTIF JENIS 1. ... 43
4.3 LEBAR EFEKTIF JENIS 2 ... 46
4.4 LEBAR PELAT IKAT (EFFECTIVE WIDTH OF PLATE) MENURUT RULE BKI TAHUN 2006, VOL .II SECTION 3.E DAN F. ... 49
4.4.1 Lebar efektif Gading-gading dan penegar ... 49
4.4.2 Pelintang dan penumpu ... 49
BAB 5 MOMEN INERSIA PENAMPANG KAPAL... 52
5.1 UMUM ... 52
5.2 MOMEN INERSIA TERHADAP SUATU SUMBU ... 52
5.2.1 Momen Inersia Terhadap Sumbu Melalui Titik Berat ... 52
5.2.2 Perpindahan Sumbu ... 53
5.3 MOMEN INERSIA POLAR (KUTUB) TERHADAP TITIK BERAT ... 53
5.4 MOMEN INERSIA PENAMPANG KAPAL... 54
BAB 6 TEGANGAN NORMAL, TEGANGAN GESER DAN TEGANGAN PUNTIR ... 58
6.1 TEGANGAN NORMAL ... 58
6.2 TEGANGAN GESER ... 59
6.3 TEGANGAN PUNTIR ... 63
BAB 7 KEKUATAN MEMANJANG KAPAL ... 65
7.1 UMUM ... 65
7.1.1 Ruang lingkup ... 65
7.1.2 Rincian Perhitungan ... 65
7.1.3 Asumsi – asumsi dalam perhitungan, kondisi pemuatan ... 65
7.1.4 Petunjuk pemuatan ... 65
7.1.5 Definisi ... 71
7.2 Beban pada badan kapal ... 72
7.2.1 Umum ... 72
7.2.2 Beban kapal di air tenang ... 72
7.2.3 Beban akibat gelombang ... 74
7.3 Modulus penampang, momen inersia, kekuatan geser dan lengkung ... 78
7.3.1 Modulus penampang sebagai fungsi momen lengkung memanjang ... 78
iv
7.3.3 Momen inersia penampang tengah kapal ... 80
7.3.4 Perhitungan modulus penampang ... 80
7.3.5 Kapal dengan banyak palka ... 81
7.3.6 Kekuatan geser ... 82
7.3.7 Bukti kekuatan lekuk (buckling) ... 82
7.3.8 Perhitungan beban ultimate untuk penampang melintang kapal ... 83
7.4 Tegangan rancang ... 83
7.4.1 Umum ... 83
7.4.2 Tegangan normal dalam arah memanjang kapal ... 86
7.4.3 Tegangan geser ... 88
7.5 Beban yang diijinkan pada kapal di air tenang ... 89
7.5.1 Momen lengkung vertical ... 89
7.5.2 Gaya geser vertical ... 90
7.5.3 Momen torsional statis ... 91
7.6 Kapal dengan bukaan geladak yang besar ... 91
7.6.1 Umum ... 91
7.6.2 Petunjuk untuk penentuan modulus penampang ... 92
7.6.3 Petunjuk untuk rancangan penumpu kotak (box girder) melintang kapal kontainer ... 92
7.6.4 Petunjuk untuk displasemen girder atas badan kapal ... 93
BAB 8 PENUTUP ... 94
v
DAFTAR GAMBAR
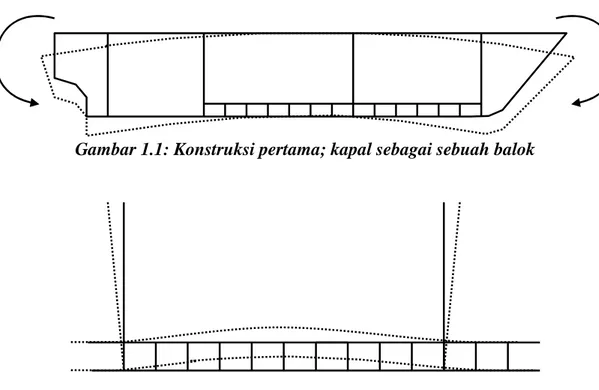
Gambar 1.1: Konstruksi pertama; kapal sebagai sebuah balok 2 Gambar 1.2: Konstruksi kedua; konstruksi datar berpenegar. 2
Gambar 1.3: Konstruksi ketiga; Pelat diantara penegar 3
Gambar 1.4: Penyebaran berat badan kapal, bentuk trapesoidal 5 Gambar 1.5: Pendekatan distribusi berat badan kapal bentuk gabungan 6
Gambar 1.6: Distribusi gaya berat. 8
Gambar 1.7: Perletakan sumbu gelombang pada gambar bonjean. 9 Gambar 2.1: Arah gerak kapal terhadap arah gerak gelombang. 10
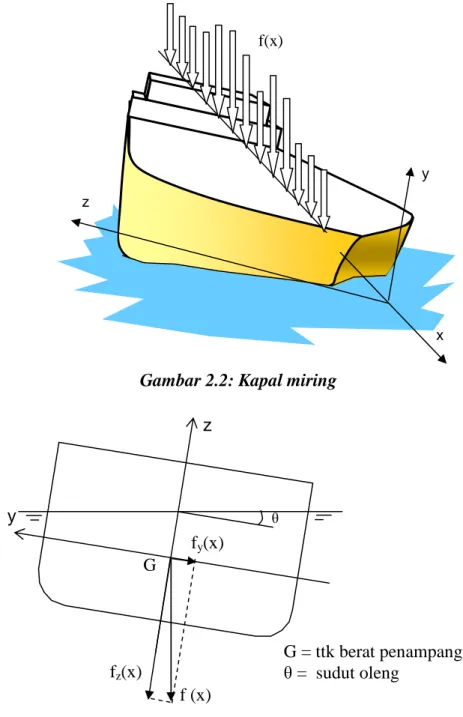
Gambar 2.2: Kapal miring 11
Gambar 2.3: Beban pada kapal miring 11
Gambar 2.4: Kapal melengkung pada bidang horisontal 12
Gambar 2.5: Kapal melengkung pada bidang vertical 12
Gambar 2.6: Netral axis untuk horizontal bending dan vertical bending momen 13 Gambar 2.7: Tegangan total maksimum untuk berbagai sudut heeling 14
Gambar 2.8: Tegangan di geladak Tanker 300 14
Gambar 2.9: Korelasi horizontal dan vertical bending stress. 15 Gambar 2.10: Variasi tegangan pada penampang lingkaran dalam daerah elastis 16 Gambar 2.11: Variasi tegangan pd. penampang lingkaran berlubang
dalam daerah elastic 18
Gambar 2.12: Penampang kapal 20
Gambar 2.13: Kapal pada gelombang cuartering 20
Gambar 2.14: Kapal pada kondisi terpuntir 21
Gambar 2.15: Beban pada penampang buritan dan haluan 21
Gambar 3.1: Penyebaran gaya berat dan gaya tekan keatas 23
Gambar 3.2: Penyebaran beban sepanjang kapal 23
Gambar 3.3: Integral beban sepanjang kapal 24
Gambar 3.4: Penyebaran Gaya Lintang sepanjang kapal 24
Gambar 3.5: Diagram Gaya Lintang dan Momen Lengkung 25
Gambar 3.6: Diagram Momen lengkung, Sudut lentur, dan Lenturan 26
Gambar 3.7: Diagram 1η(x) 26
Gambar 3.8: koreksi Linear untuk Gaya lintang 29
Gambar 3.9: Koreksi Linear untuk Momen lengkung 29
vi
Gambar 3.11: Integral f(x) dari x0 sampai x1 31
Gambar 3.12: Grafik beban f(x) 32
Gambar 3.13: Grafik gaya lintang Q(x) 33
Gambar 3.14: Grafik M(x)/EI(x) 36
Gambar 3.15: Grafik Integral M(x)/EI(x) 37
Gambar 3.16: Segi empat 39
Gambar 3.17: Segi tiga 39
Gambar 3.18: Trapesium 39
Gambar 3.19: Sisa berat di ujung-ujung kompartemen 40
Gambar 4.1: Penyebaran tegangan selebar pelat hadap b 42
Gambar 4.2: Lebar Efektif 43
Gambar 4.3: Penyebaran momen fungsi sinus 43
Gambar 4.4: Penyebaran momen fungsi cosinus 44
Gambar 4.5: Penyebaran momen fungsi linier 44
Gambar 4.6: Grafik 4 keadaan menurut G. Murray & Boyd 45 Gambar 4.7: Grafik momen dan asumsi panjang tiap bagian. 45
Gambar 4.8: Arah pembebanan pada pelat. 46
Gambar 4.9: Penguatan sejajar dengan bilah penumpu 50
Gambar 4.10: Penguat tegak lurus terhadap bilah penumpu 50
Gambar 5.1: Daerah yang diarsir dipergunakan untuk memperoleh
teorema sumbu sejajar 52
Gambar 5.2: Momen inersia polar 53
Gambar 5.3: Penampang simetris 54
Gambar 5.4: Momen inersia dengan perputaran sumbu 56
Gambar 6.1: Penyebaran tegangan pada penampang kapal 58
Gambar 6.2: Elemen balok sepanjang dx 59
Gambar 6.3: Elemen dx-dζ 61
Gambar 6.4: Penampang kapal di ruang muat 62
Gambar 6.5: Beban pada penampang buritan dan haluan 64
Gambar 7.1: Aturan Penandaan 72
Gambar 7.2: Faktor Distribusi CT1 dan CT2 untuk Momen Torsional 73 Gambar 7.3: Faktor Distribusi cM dan Faktor Pengaruh cv 75
Gambar 7.4: Faktor Distribusi CQ 76
Gambar 7.5: Faktor Distribusi cQH 77
vii
Gambar 7.7: Daerah bayang-bayang 81
Gambar 7.8: Kapal dengan Banyak Palka 82
Gambar 7.9: Koreksi Kurva Gaya Geser 90
Gambar 7.10: Faktor Koreksi fr dan Faktor Dstribusi cu 92
viii
DAFTAR TABEL
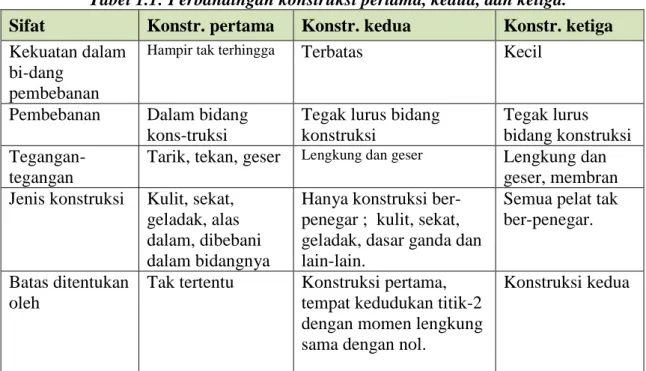
Tabel 1.1: Perbandingan konstruksi pertama, kedua, dan ketiga. ... 3
Tabel 1.2: Harga k untuk ordinat ... 6
Tabel 3.1: Perubahan gaya berat menjadi bentuk tangga ... 31
Tabel 3.2: Perubahan gaya tekan keatas menjadi bentuk tangga ... 32
Tabel 3.3: Perhitungan momen lengkung dan gaya lintang ... 34
Tabel 3.4: Koreksi linier ... 35
Tabel 3.5: Perhitungan suku pertama sudut lentur dan suku pertama lenturan ... 38
Tabel 4.1: Lebar efektif em pelintang dan penumpu ... 49
Tabel 5.1: Perhitungan momen inersia penampang terhadap sumbu horisontal ... 55
Tabel 5.2: Perhitungan momen inersia penampang terhadap sumbu vertikal ... 55
Tabel 7.1: Faktor Distribusi cQ ... 76
Tabel 7.2: Faktor Distribusi cQH ... 77
1
BAB 1
PENDAHULUAN
1.1 UMUMSetelah kita pelajari bentuk dan penentuan ukuran konstruksi serta berbagai cara hubungan antara satu dengan lain bagiannya, selanjutnya kita akan pelajari tentang kekuatan memanjang kapal. Seperti diuraikan di depan, bahwa dalam operasionalnya kapal akan mngalami berbagai keadaan cuaca di laut, sehingga dalam menentukan ukuran konstruksi harus mampu menghadapi keadaan tersebut.
Menghitung kekuatan suatu konstruksi sangat tergantung beban yang bekerja pada konstruksi tersebut, oleh karenanya pembahasan mengenai kekuatan memanjang kapal kita awali dengan pembebanan yang bekerja pada sebuah kapal. Oleh karenanya, berikut ini kita awali pembahasan kekuatan kapal dengan mengenal beban-beban yang bekerja pada sebuah kapal.
Ada beberapa cara untuk menggolongkan beban yang direncanakan sanggup ditahan oleh bagian konsturksi sebuah kapal. Beberapa beban-beban terpenting adalah beban dinamis dalam arti bahwa bekerjanya beban tersebut berubah bersamaan dengan perubahan waktu, misalnya beban-beban gelombang. Tetapi beban gelombang ini frekwensinya adalah rendah sekali jika dibandingkan dengan frekwensi asli (natural frequenci) dari bagian kontruksi, hingga biasanya beban tersebut dapat diperhitungkan sebagai beban statis.
Pengecualian terjadi pada laut yang amat bergelombang dan kecepatan yang tinggi, dalam keadaan mana haluan kapal mungkin timbul dan “terjun/tenggelam” lagi dengan keras, mengakibatkan beban sesaat yang besar dan getaran transien yang hebat.
Beban lain bersifat statis murni misalnya berat badan kapal dan muatan yang diangkut dalam pelayarannya serta gaya tekan air keatas yang bekerja pada kapal diair tenang.
1.1.1 Beban-beban pada kapal
Berikut diberikan contoh daftar beban-beban penting yang bekerja pada kapal yang dikumpulkan menjadi tiga kelompok utama; statis, quasi statis, dan dinamis :
Beban statis.
• Gaya tekan air keatas.
• Berat bagian kontruksi kapal.
• Berat muatan dan barang barang lain di dalam kapal.
• Reaksi tumpuan pada waktu kapal kandas atau di dok. Beban quasi statis.
• Gaya tekan ombak.
• Gaya-gaya tekan dinamis karena gerakan kapal.
• Gaya inersia = massa kapal dan muatannya x percepatan.
• Gaya tarik tali tunda, gaya dorong baling-baling.
• Gaya akibat gerakan muatan cair dalam tangki-tangki. Beban dinamis.
• Beban sesaat karena “slamming”
• Damparan ombak pada dinding-dinding bangunan atas atau haluan yang melebar.
• Beban berat air yang naik ke geladak.
2 Dalam banyak hal, perhitungan kekuatan bagian konstruksi kapal didasarkan seluruhnya pada beban statis, seolah-oleh kapal terapung diam diair tenang. Bahkan banyak biro klasifikasi mendasarkan peraturannya pada perhitungan untuk kapal diair tenang semacam itu dengan tambahan yang ditentukan sebarang untuk beban-beban di laut bergelombang, atau meminta perhitungan momen lengkung kapal diatas gelombang tetapi dalam keadaan diam. Cara-cara diatas biasanya dimaksudkan sebagai patokan atau syarat minimum dan biasanya terbukti cukup untuk menghindarkan kerusakan kerusakan berat akibat kurang kuatnya konstruksi.
Dari tahun ke tahun besar kapal, ukuran-ukuran bagiannya dan macam sistem kontruksi pembangunannya, berkembang perlahan-lahan berdasarkan pengalaman-pengalaman sebelumnya. Untuk kapal-kapal yang mempunyai kelainan besar, perencana harus dapat memperhitungkan beban yang akan diterima kapalnya setepat mungkin, untuk menghindari hal-hal yang tidak diinginkan.
1.1.2 Sifat-Sifat Umum Respons Konstruksi Kapal Terhadap Beban.
Telah kita ketahui bersama bahwa sebuah kapal terdiri dari beberapa konstruksi datar yang saling berpotongan, misalnya pelat dasar, sekat dan pelat samping/lambung. Konstruksi datar ini mungkin terdiri dari pelat yang disangga suatu sistem penegar. Untuk mudahnya berdasarkan respon dari bangunan keseluruhan dan dari masing-masing bagian, respon bagian-bagian konstruksi dibagi menjadi respon pertama, kedua, dan ketiga sebagai berikut : Respon pertama : tegangan dan lenturan badan kapal yang berlaku sebagai sebuah kapal. Respon kedua : tegangan dan lenturan dari konstruksi datar besar ysng berpenegar,
misalnya bagian dari pelat yang terletak antara dua sekat lintang. Respon ketiga : tegangan dan lenturan bagian pelat atau kulit diantara penegar-penegar. Bagian-bagian ini dilukiskan dalam Gambar 1.1sampai dengan Gambar 1.3 dan diberikan juga perbandingan antara respon konstruksi pertama, kedua, dan ketiga dalam Tabel 1.1 menurut St. Denis (1954).
Gambar 1.1: Konstruksi pertama; kapal sebagai sebuah balok
3 Gambar 1.3: Konstruksi ketiga; Pelat diantara penegar
Tabel 1.1: Perbandingan konstruksi pertama, kedua, dan ketiga.
Sifat Konstr. pertama Konstr. kedua Konstr. ketiga
Kekuatan dalam bi-dang
pembebanan
Hampir tak terhingga Terbatas Kecil
Pembebanan Dalam bidang kons-truksi
Tegak lurus bidang konstruksi
Tegak lurus bidang konstruksi
Tegangan-tegangan
Tarik, tekan, geser Lengkung dan geser Lengkung dan
geser, membran Jenis konstruksi Kulit, sekat,
geladak, alas dalam, dibebani dalam bidangnya
Hanya konstruksi ber-penegar ; kulit, sekat, geladak, dasar ganda dan lain-lain.
Semua pelat tak ber-penegar.
Batas ditentukan oleh
Tak tertentu Konstruksi pertama, tempat kedudukan titik-2 dengan momen lengkung sama dengan nol.
Konstruksi kedua
Keterangan mengenai beban yang dibutuhkan dalam perhitungan tiap bagian respon konstruksi diberikan dibawah ini.
Pertama : penyebaran memanjang dari berat, gaya tekan keatas, penyebaran memanjang dari gaya gelombang dinamis dan gaya inersia.
Kedua : penyebaran memanjang dan melintang dari gaya tekan cairan dan beban beban lain dari pada bidang konstruksi datar.
Ketiga : penyebaran memanjang dan melintang dari gaya tekan cairan dan beban beban lain dari pada bidang konstruksi datar.
1.1.3 Pembebanan Pada Tahap Pembuatan.
Beban beban pada tahap pembuatan ini, sama sekali tergantung pada susunan konstruksi, cara serta urutan pembuatan dan sebagainya.
Disini hanya dicatat bahwa beban-beban ini selalu ada dan harus diperhitungkan; misalnya beban dalam yang tertinggal akibat proses pengelasan, beban yang bekerja pada seksi atau blok konstruksi pada saat pemindahan dari lokasi satu ke lokasi lainnya, dan masih banyak lagi yang lain. Salah satu diantaranya adalah pembebanan pada waktu kapal diluncurkan ke dalam air dengan sistem memanjang, dimana kapal akan mengalami tegangan tegangan secara keseluruhan dan setempat yang cukup besar, bahkan kadang-kadang berakibat fatal, antara lain kapal berubah bentuk (kapal mengalami deformasi), dimana hal tersebut tidak mungkin untuk diperbaiki lagi.
4
1.1.4 Pembebanan Uji
Dalam bidang perkapalan, adalah umum untuk menguji kemampuan konstruksi dan kesempurnaan pengerjaan.
Pembebanan uji biasanya ada dua macam;
a) Pembebanan uji material; yang dimaksud disini adalah pembebanan yang dilakukan dilaboratorium untuk memeriksa kesesuai kemampuan material dengan spesifikasinya,
b) Pembebanan uji konstruksi; yang dimaksud disini adalah pembebanan yang dilakukan dilapangan tempat pembangunan kapal misalnya; dengan cara mengisi air atau udara bertekanan sampai selang waktu tertentu untuk pengetesan pada tangki-tangki kecil muatan cair. Dimana pengujian dengan mempergunakan air biasanya dilakukan dengan mengisi tangki-tangki dengan air sampai 2,5 m diatas puncak tangki atau sampai pipa limpah (diambil yang lebih besar). Untuk muatan-muatan dengan berat jenis rendah seperti LNG atau LPG, biasanya beban uji ini akan terlalu berlebihan dan pengujian dapat dilakukan dengan tinggi yang dikurangi atau pengujian dengan udara bertekanan. Untuk pengetesan pada lambung, sekat, dan bagian-bagian lainnya biasanya dilakukan dengan penyemprotan air, sesuai dengan tekanan kerja yang dialaminya dalam pelayaran.
Pada dasarnya pembebanan uji ini dimaksudkan untuk memastikan kemampuan material dan kekuatan konstruiksi dalam menerima beban kerja. Hal ini berarti bahwa beban uji harus diperhitungkan sesuai keadaan pembebanan yang akan dialami kapal dalam pelayarannya, terutama untuk pembebanan lokal pada bagian kampuh las konstruksi datar. Dimana semua pengujian ini dilaksanakan sebelum kapal terapung di air.
1.1.5 Pembagian Kategori Kapal Menurut BKI
Tujuan perhitungan kekuatan memanjang adalah untuk menentukan tegangan yang dialami badan kapal sebagai suatu kesatuan pada arah memanjang. Tegangan ini diakibatkan oleh keadaan dimana berat kapal pada suatu titik sepanjang kapal tidak disangga oleh gaya tekan air ke atas yang sama besarnya. Syarat keseimbangan benda terapung hanya menyebutkan bahwa resultan gaya berat dan resultan gaya tekan keatas adalah sama besar dan berlawanan arahnya, serta bekerja dalam satu garis vertikal.
Jika perbedaan penyebaran memanjang antara gaya berat dan gaya tekan makin besar maka pembebanan yang bekerja pada kapal makin besar pula.
Penyebaran memanjang dari berat kapal ditentukan oleh keadaan muatan, sedangkan penyebaran gaya tekan keatas ditentukan oleh keadaan gelombang. Pada kapal pedalaman, yang lebih menentukan adalah keadaan muatan, sedang pada kapal yang berlayar di samudera, keadaan permukaan air yang gelombang juga ikut pula menentukan besarnya pembebanan yang akan dialami oleh kapal dalam pelayarannya. Pada umumnya perhitungan kekuatan memanjang dibuat berdasarkan keseimbangan statis antara gaya berat dan gaya tekan keatas. Gaya-gaya inersia tidak diperhatikan disini karena sudah tercakup dalam penentuan tinggi gelombang.
Berdasarkan Rule BKI untuk kapal-kapal yang panjangnya lebih dari 65 m, seluruh ukuran konstruksi dari struktur memanjang kapal harus ditentukan berdasarkan perhi-tungan kekuatan memanjang. Kapal-kapal tersebut dikelompokkan dalam 2 katagori;
Kategori kapal yang dimaksud disini didefinisikan untuk semua kapal samudera yang dikelaskan dengan panjang 65 m atau lebih yang kontrak pembangunannya pada atau setelah 1 Juli 1998, sebagai berikut :
5 Kapal – kapal kategori I :
• Kapal dengan bukaan geladak yang luas dimana, sesuai dengan F, yaitu tegangan gabungan akibat kelengkungan vertical dan horizontal serta beban lateral dan beban torsional harus dipertimbangkan.
• Kapal tanker bahan kimia (chemical tankers) dan kapal pengangkut gas (Gas Carriers).
• Kapal-kapal dengan panjang lebih dari 120 m, yang muatan dan/atau ballast bisa didistribusikan tidak merata.
• Kapal-kapal dengan panjang kurang dari 120 m, jika rancangannya memper-hitungkan muatan dan ballast didistribusikan tidak merata, termasuk Kategori II. Kapal – kapal kategori II :
Kapal-kapal yang dirancang sedemikian rupa sehingga kemungkinan kecil akan terjadi variasi distribusi muatan dan ballast (seperti kapal penumpang) dan kapal-kapal pada pelayaran reguler dan tetap yang manual pemuatannya memberikan petunjuk yang cukup jelas dan kapal-kapal yang dikecualikan dari Kategori I.
Permeriksaan kekuatan, di awali dengan perhitungan untuk kondisi kapal di air tenang, kemudian dilanjutkan untuk keadaan digelombang.
1.2 PEMBEBANAN PADA KAPAL
1.2.1 Penyebaran Memanjang Gaya Berat.
Langkah pertama dalam perhitungan bending momen memanjang kapal ialah menentukan penyebaran gaya berat sepanjang kapal. Distribusi berat ini merupakan sebagian pembebanan yang akan menimbulkan bending momen, adalah merupakan hasil penjumlahan dari penyebaran berat kapal kosong dengan berat muatan, perbekalan, crew, penumpang, persediaan bahan bakar, minyak lumas, air tawar dan lain sabagainya, yaitu merupakan berat total pada saat kapal berlayar.
Karena distribusi berat ini biasanya dihitung dalam tahap perencanaan, maka distribusi berat ini, (terutama berat badan kapal) dihitung dengan cara pendekatan.
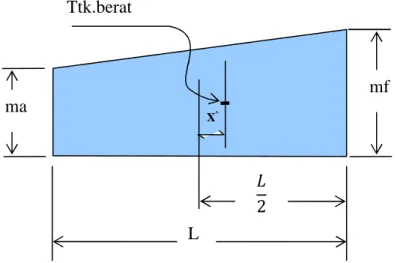
Pendekatan bentuk distribusi berat kapal yang paling sederhana adalah; distribusi berat berbentuk trapezium, seperti diperlihatkan pada Gambar 1.4 berikut.
Gambar 1.4: Penyebaran berat badan kapal, bentuk trapesoidal Ttk.berat X^ mf L 2 ma
6 Penggambaran trapesoidal didasarkan pada total dari massa Mo, dan jarak titik berat terhadap midship x^.
Berdasarkan rumus-rumus untuk trapesoidal maka :
(
+)
= + − = ma mf L Mo ma mf ma mf L X^ 2 ) ...(1.1 ... 6Dengan demikian maka :
= − 6.
^= + 6.
^… … … (1.2)
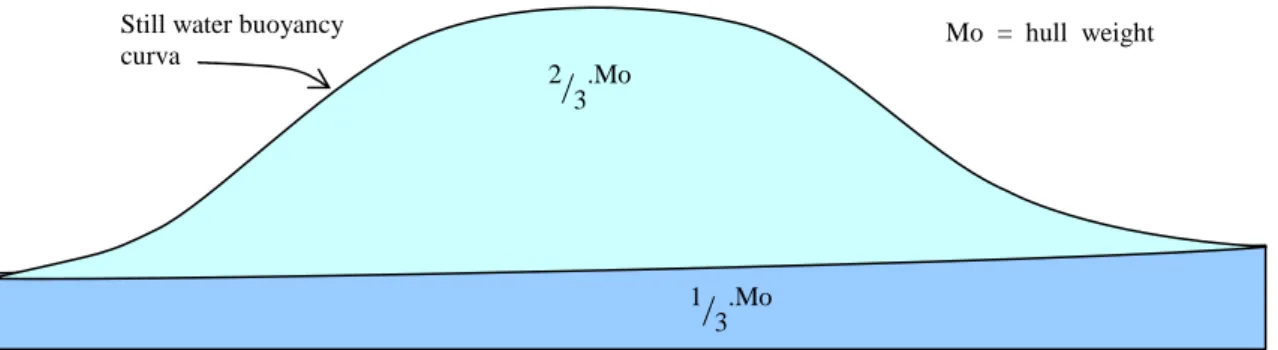
Biasanya distribusi berat seperti diatas hanya dipakai 1/3 bagiannya saja dari berat kapal kosong sedang 2/3 bagiannya dianggap terdistribusi seperti distribusi gaya tekan keatas pada air tenang, seperti diperlihatkan pada Gambar 1.5 berikut.
Gambar 1.5: Pendekatan distribusi berat badan kapal bentuk gabungan
Distribusi berat kapal kosong yang lebih sederhana adalah merupakan gabungan antara empat persegi panjang pada 1/3 L ditengah kapal dan trapesium pada 1/3 L diujung-ujungnya. Adapun cara penentuan ordinat untuk penggambaran distribusi terpesium ini adalah sebagai berikut .
Ordinat =
dimana, harga k diperoleh dari Tabel 1.2 berikut :
Tabel 1.2: Harga k untuk ordinat
Harga k untuk ordinat
a
b
c
Kapal kurus δ< 0,6 0,653 1,195 0,566 Kapal sedang 0,6 < δ < 0,75 0,680 1,185 0,580 Kapal gemuk δ > 0,75 0,706 1,174 0,596 k L Mo . Mo = hull weight 1
/
3 .Mo 2/
3.Mo Still water buoyancy7 Jika diperlukan harga-harga a, b, dan c yang lain, harga-harga a, b, dan c harus memenuhi hubungan berikut :
Cara lain untuk menghitung distribusi berat kapal kosong adalah menggunakan cara yang dibuat oleh Lloyd’s Register (1964). Cara ini dapat dipakai baik kalau berat kapal kosong sudah diketahui terlebih dulu maupun belum.
Pada pokoknya, berat kapal kosong dengan perlengkapannya tetapi tanpa mesin dan poros serta baling-baling dipecah menjadi dua, bagian badan kapal sampai geladak teratas yang menerus dan bagian-bagaian lain seperti bagunan atas mesin-mesin geladak dan sebagainya. Masing-masing bagian dihitung dengan rumus-rumus yang sudah tersedia sehingga akhirnya didapat penyebaran berat keseluruhan, sebagai penjumlahan dari penyebaran dari masing-masing bagian. Cara ini dikembangkan khusus untuk perhitungan kekuatan memanjang dan lebih teliti dari cara yang disebutkan sebelumnya.
Sebagai contoh; Pernyataan sekat lintang atau bagian utama kontruksi lainnya sebagai beban terpusatkan adalah tidak tepat, karena dari segi konstruksi, sedikit banyak beratnya akan tersebar ke bagian lainnya hal tersebut diperinci dalam L.R.64 diatas.
Pada perancangan kapal saat ini, orang cenderung menghitung penyebaran berat kapal dengan menghitung langsung dari hasil perencanaan konstruksi dengan cara pos per pos, agar diperoleh hasil yang lebih teliti dan tepat. Disini harus diperhatikan bahwa letak titik berat dari masing-masing kelompok berat yaitu muatan, permesinan, bahan bakar, perlengkapan dan peralatan, air tawar dan sebagainya adalah sesuai dengan harga-harga menurut perhitungan berat.
Setelah lengkung berat kapal kosong diperoleh, kita lihat lengkung grafik kapasitas ruangan dan perhitungan berat dari semua bagian-bagian lain yang telah didistribusikan ke arah memanjang.
Untuk kapal-kapal dengan kamar mesin ditengah dan penyebaran muatan yang biasa, menurut pengalaman momen lengkung terbesar kebanyakan akan terjadi pada keadaan kapal disatu puncak gelombang. Dalam hal ini dianggap bahwa bahan bakar, air dan persediaan lainnya didaerah tengah kapal sudah dipakai habis, karena hal ini akan menyebabkan keadaan terburuk.
Pada kapal-kapal dengan kamar mesin dibelakang keadaan kapal di dua puncak gelombang akan memberikan momen lengkung terbesar dan dalam hal ini dianggap persediaan di daerah ujung-ujung kapal sudah habis.
Secara grafis distribusi berat badan kapal beserta segala muatan yang diangkut dalam pelayarannya w(x) dapat dilihat pada Gambar 1.6 berikut ini :
3
2
2
+
=
+
b
c
a
c
b
b
a
8
Gambar 1.6: Distribusi gaya berat.
Karena berat muatan merupakan bagian yang terbesar dari kumpulan muatan berat yang ada pada kapal, maka penyusunan muatan sangat berpengaruh terhadap sistem pembebanan pada kapal. Bila muatan kapal penuh dan kapal mempunyai kamar mesin dibelakang, maka distribusi gaya berat akan cenderung terkumpul ditengah kapal, sebaliknya apabila muatan pada kapal tidak ada ( kapal dalam keadaan kosong ), distribusi gaya berat akan cenderung besar di ujung-ujung kapal.
1.2.2 Penyebaran Memanjang Gaya Tekan Keatas.
Gaya tekan keatas adalah merupakan reaksi massa air terhadap kapal yang tidask lain adalah displacement. Dimana harga displacement tersebut sama dengan massa total kapal, demikian juga resultante gaya tekan keatas tersebut harus tepat satu garis vertical dengan resultanta gaya berat.
Seperti kita ketahui bahwa displacement kapal dapat diperoleh dari intergrasi ke arah memanjang dari massa-massa air sepanjang kapal.
( )
(
1
.
3
)
0dx
x
m
L∫
=
∆
dan total gaya tekan keatas menjadi
g.
∆
( N )dimana : m(x) = massa bagian air ( kg/m ) g = grafitasi ( m/dt2 ) Karena massa bagian adalah :
m(x) = ρ.a(x) ………(1.4)
maka distribusi gaya tekan keatas per meter menjadi :
b(x) = ρ.g.a(x). (N/m) ………(1.5) dimana : ρ = massa jenis air (biasanya termasuk
koreksi untuk tebal kulit ρ = 1,031 ton/m3).
a(x) = luas station di potongan sejauh x dari AP. (m2). Berat sampai geladak teratas
Bangunan Atas
muatan muatan muatan
muatan
9 Untuk kapal yang berlayar diperairan tenang, distribusi gaya tekan keatas ini dapat ditentukan dengan cepat. Dari Diagram Bonjean dapat dibaca luas station untuk sarat yang ditentukan dan jika luas yang didapat (dalam m2) dikalikan dengan 1,031.g akan didapat intensitas gaya tekan keatas pada station tersebut. Untuk kapal yang berlayar dilaut bergelombang, mula-mula harus digambarkan dahulu bentuk gelombang seperti yang diterangkan dalam pasal yang lalu, dengan skala meninggi dan memanjang, yang sama skala pada diagram Bonjean. Untuk pendekatan pertama, sumbu gelombang diletakkan berimpit dengan sarat kapal. Kemudian dihitung isi bagian kapal yang berada dalam gelombang dengan Simpson atau lainnya. Pada umumnya displacement yang didapat tidak akan sama dengan berat kapal, jadi gelombang perlu digeser pada arah vertikal.
Besarnya penggeseran diperkirakan dari :
....(
1.6)
... . ... wl A D h =+ ∆ ∆1
ρ
g
Dimana : ∆h = besar penggeseran vertikal sumbu gelombang (positif keatas)
∆D = selisih antara jumlah berat dengan displacement = D1 – D0 D1 = jumlah berat
D0 = displacemen sesuai sarat T. AWL= luas bidang garis air.
Setelah besar displacement sama dengan total berat kapal, seperti diterangkan dimuka maka untuk memperoleh gaya tekan keatas per satuan panjang b(x), luas tiap station dikalikan dengan 1,031.g .
Gambar 1.7: Perletakan sumbu gelombang pada gambar bonjean.
Gambar 1.5 diatas menunjukkan; pergeseran perlu dilakukan ke atas, apabila gaya berat kapal lebih besar dari pada gaya tekan keatas pada kapal di gelombang, dan sebaliknya digeser ke bawah, apabila gaya berat kapal lebih kecil dari pada gaya tekan keatas
Syarat keseimbangan kedua yaitu bahwa titik berat dan titik tekan harus terletak pada satu garis tegak, disini belum diperiksa dan akan dipenuhi dalam persamaan momen lengkung. Dalam perhitungan diatas, bangunan atas juga dimasukkan dalam perhitungan displacement apabila gelombang yang terjadi sampai mengenai bangunan atas.
T Hw /2 Hw /2 ∆ h
10
BAB 2
KOMBINASI VERTICAL DAN HORIZONTAL
BENDING MOMENT
Dalam pelayarannya, sebuah kapal akan mengalami kondisi laut yang bermacam-macam gelombang laut. Secara garis besar gerakan kapal terhadap arah gerak gelombang dikelompokkan dalam tiga arah utama; head seas, cuartering seas dan beam seas, seperti dijelaskan dalam Gambar 2.1 berikut.
Gambar 2.1: Arah gerak kapal terhadap arah gerak gelombang.
Head seas adalah gerakan kapal yang searah atau berlawanan arah dengan arah gerak gelombang.
Cuartering seas adalah gerakan kapal yang arahnya membentuk sudut atau serong terhadap arah gerak gelombang.
Beam seas adalah gerakan kapal yang melintang terhadap arah gerak gelombang.
Oleh karena itulah maka dalam kesehariannya kapal mengalami beban-beban luar, sehingga kapal akan mengalami keadaan trim dan rolling.
Puncak gelombang. Puncak gelombang. Puncak gelombang. Puncak gelombang. Puncak gelombang. Arah gerak gelombang Head seas Cuartering seas Beam seas
11 2.1 KAPAL DALAM KEADAAN MIRING
Kapal rolling atau rolling akan mengalami pembebanan gaya berat yang tegak lurus (vertical) terhadap permukaan air.
Perhitungan yang lebih teliti menunjukkan bahwa pengaruh keolengan terhadap momen lengkung hanyalah sedikit, sedang perubahan modulus penampang adalah besar.
Gambar 2.2: Kapal miring
Gambar 2.3: Beban pada kapal miring
fy(x) = f(x). sin θ dx fz(x) = f(x). cos θ Qy =
∫
fy(x) dx Qz =∫
fz(x) dx Mz =∫
Qy(x) My =∫
Qz(x) dx fy(x) fz(x) f (x) y z G G = ttk berat penampang θ = sudut oleng θ f(x) y z x12
2.2 KAPAL MENGALAMI LENGKUNGAN
Beban momen yang bekerja pada kapal akan mengakibatkan lengkungan memanjang pada kapal; lengkungan horisontal dan lengkungan vertical, seperti yang terlihat dalam Gambar 2.4 dan Gambar 2.5berikut:
Gambar 2.4: Kapal melengkung pada bidang horisontal
Gambar 2.5: Kapal melengkung pada bidang vertical
Jika kita hendak menyelidiki tegangan pada waktu oleng dengan lebih teliti, momen lengkung pada keadaan oleng M diuraikan pada arah tegak dan mendatar dan dihitung tegangan untuk masing-masing arah seperti diperlihatkan pada Gambar 2.6berikut.
My My Qz Qz Mz Mz Qy Qy
13 Gambar 2.6: Netral axis untuk horizontal bending dan vertical bending momen
My = M sin Mz = M Cos Dengan menggunakan :
INA = momen inersia terhadap sumbu netral pada kapal tegak. ICL = momen inersia terhadap centre line.
V = tegangan lengkung vertical. H = tegangan lengkung horizontal. Maka ; tegangan total menjadi :
= V + H = . . . .(2.1) Untuk = 0, dari pers. (3.1) akan diperoleh :
. + !
"# . $ = 0 atau :
Karena y/z = tan ,
maka : . . . .(2.2)
Apabila kapal mempunyai INA = ICL, maka akan kita peroleh : tan = - tan .
Tetapi; pada umumnya ICL lebih besar dari INA dan perhitungan momen inersia cenderung adalah INA (terhadap sumbu horizontal).
Kita tahu bahwa pada sebuah kapal ada sebuah sumbu simetri yaitu centre line, oleh karena itu ICL dan INA merupakan harga-harga ekstrem, harga-harga maksimum dan minimum dari momen inersia.
Dengan memperhatikan pers. (2.1), maka keadaan extrim tersebut akan terjadi apabila d / d
θ
= 0 sehingga :θ
θ
σ
σ
σ
σ
σ
.cos . . .sin . . z I M y I M CL NA θ θ +σ
z I I y CL NA . tanθ − =ψ
. tan tanψ
θ
CL NA I I − =ψ
θ
σ 0 . . cos . . . sin . = + − = z I M y I M d d CL NAθ
θ
θ
σ
z y y NA (heeled) ψθθθθ
NA (upright) z14 . . . . . . (2.3)
Tegangan maksimum dan minimum ini terjadi sangat ditentukan oleh harga-harga modulus penampang, maka akan selalu terkait dengan harga-harga maksimum dari y dan z. Hal ini mengandung arti bahwa tegangan maksimum dan minimum tersebut akan terjadi pada sudut dari penampang kapal.
Gambar 2.7berikut ini akan menunjukkan tegangan yang terjadi pada keempat sudut dari penampang kapal. Dalam gambar tersebut terlihat jelas tegangan maksimim dan minimum terjadi pada sudut heeling sekitar 300 .
Dalam praktek, horizontal dan vertical bending momen tidak dapat langsung digabung dan belum tentu terjadi secara bersama-sama.
Gambar 2.7: Tegangan total maksimum untuk berbagai sudut heeling
Hal tersebut sangat tergantung pada keadaan laut yang berbeda-beda dan terutama pada arah pergerakan kapal terhadap arah gerak gelombang.
Sebagai contoh marilah kita perhatikan Gambar 2.8 yang memperlihatkan hasil perhitungan teoritis dari karateristik tegangan lengkung gelombang untuk sebuah kapal tanker yang mempunyai panjang 300 m.
Gambar 2.8: Tegangan di geladak Tanker 300
.
.
tan
CL NA CL NAW
W
I
y
I
z
=
=
θ
0 0 0 600 300 Radial coordinate is Stress at deck edge900
HEAD SEAS,
σ
H^ &σ
V^ independentBEAM SEAS,
σ
H^ &σ
V^ closely corelatedσ
^σV^
σH^
0 200 400 600 θσ = σV + σH
Max. stress in deck
15 Pada Gambar 2.8 tersebut diperlihatkan tegangan di geladak yang bersesuaian dengan lengkungan tegangan horizontal dan vertical, H^ dan V^, serta tegangan total ^, (kesemuanya tergantung pada sudut arah gerakan kapal terhadap arah gerak gelombang). Dalam Gambar 2.9 dapat dilihat korelasi antara H^ dan V^ yang dinyatakan dengan koefisien korelasi .
Apabila kedua tegangan tersebut terpisah (berdiri sendiri-sendiri) maka = 0 dan apabila terjadi secara serentak dan saling terkait maka ∈∈∈∈ = 1
Gambar 2.9: Korelasi horizontal dan vertical bending stress.
Jika kita nyatakan secara umum maka persamaan tegangan dapat kita tulis sebagai berikut :
&
^= '&
(^)
+ 2. *. &
(^. &
+^+ &
+^)….. (2.4)
untuk bending momen yang terjadi tidak saling bergantungan, maka tidak ada korelasi antara
σ
H^ danσ
V^ , hal ini berarti ∈ = 0 dan diperoleh : &^ = '&(^)+ 2.0. &(^. &+^+ &+^) &^ = '&
(^)+ &+^) ….. (2.5) Jika ∈ = 1 , maka :
&^ = '&
(^)+ 2.1. &(^. &+^+ &+^) &^ = ',&
(^ + &+^-) &^ = &
(^ + &+^ ….. (2.6)
Untuk kapal-kapal yang berlayar di perairan yang tenang, beban arah horisontal relative kecil dan cenderung nol, oleh karena itu pembahasan kapal di air tenang kapal dianggap tegak.
Sedangkan untuk kapal-kapal yang berlayar di perairan yang bergelombang, beban arah horisontal relative cukup besar oleh karena itu pembahasan kapal di air tenang akan diikuti koreksi-koreksi adanya gelombang.
σ σ σ σ σ ∈ ∈ 0 ∈ 1
00 HEAD SEAS 300QUARTERING 600 900 BEAM SEAS
SEAS
16 2.3 KAPAL MENGALAMI PUNTIRAN
2.3.1 Umum
Pada Bab ini dijelaskan bagian struktur yang mengalami puntiran sekitar sumbu longitudinal. Sebagian dari bab ini diisi dengan pembahasan bagian struktur yang berpenampang lingkaran atau berbentuk tabung. Dalam praktek, bagian-bagian struktur yang meneruskan momen puntir (torque), seperti poros motor, tabung momen puntir dan perlengkapan daya, dan seterusnya, sebagian besar mempunyai penampang lingkaran atau bentuk tabung.
Dalam pelayarannya, selain mengalami bending momen vertical atau horizaotal seperti yang telah kita pelajari di Bab sebelumnya, kapal juga akan mengalami puntiran. Puntiran pada kapal, biasanya timbul sebagai akibat peletakan barang yang tidak simetris terhadap bidang centre line (bidang diametral), yang biasanya hal ini kecil sekali pengaruhnya pada kekuatan kapal (ukuran bagian-bagian struktur penampang kapal).
Tetapi untuk kapal-kapal yang memiliki bukaan palka yang besar dan panjang, kita perlu melakukan pemeriksaan kekuatan penampang kapal (daerah bukaan) terhadap momen puntir yang timbul pada kapal ketika kapal pada posisi serong terhadap gelombang (quartering saes).
2.3.2 Rumus Puntiran
Untuk lebih mudahnya, kita awali pembahasan disini dengan melihat batang berpenampang lingkaran pejal. Pada kasus elastis, di mana tegangan adalah berbanding lurus dengan regangan dan yang belakangan ini berubah pula secara linier dari pusat sumbu puntiran, maka tegangan akan berubah pula secara linier dari sunibu pusat batang dengan penampang lingkaran.
Variasi tegangan tersebut digambarkan pada Gambar 2.10. Tidak seperti pada kasus batang yang dikenai beban aksial, tegangan ini bukanlah dari intensitas serba sama (uniform intensity). Tegangan geser maksimum terjadi pada titik-titik yang terjauh dari titik pusat O dan dinyatakan dengan τmax Titik-titik ini, seperti pada Gambar 2.10, terletak pada irisan
yang berjarak c dari titik pusat. Sementara itu, berdasarkan variasi tegangan yang linier, pada suatu titik tertentu pada jarak ρ dari O, maka tegangan geser adalah (ρ/c).τmax .
Apabila distribusi tegangan pada suatu irisan ditetapkan, maka perlawanan terhadap beban luar (momen punter) dalam bentuk tegangan puntir dapat dinyatakan.
Perlawanan terhadap momen puntir yang dikembangkan tersebut haruslah setara dengan momen puntir dalam. Karena itu suatu persamaan dapat dirumuskan sebagai berikut;
Gambar 2.10: Variasi tegangan pada penampang lingkaran dalam daerah elastis
O B c ρ τmax c ρτ max dA
17 di mana integrasi mencakup semua momen puntir yang dikembangkan pada irisan dengan gaya-gaya kecil takberhingga yang bekerja pada jarak ρ dari sumbu bagian bangunan, yaitu O pada Gambar 2.10, dan meliputi semua luas A dari penampang irisan; sedang T adalah momen puntir perlawanan.
Pada suatu irisan tertentu, τmax dan c adalah konstan, maka hubungan di atas dapat ditulis sebagai;
./01
2
3 4
5 )67 = 8
. . . (2.7)3 4)
5 67 disebut momen inersia polar dari penampang luas, adalah suatu konstanta untuk penampang luas tertentu. Dalam buku ini tetapan tersebut dinyatakan sebagai Ip.
Untuk suatu potongan berbentuk lingkaran, dA = 2πρ.dρ, di mana 2πρ adalah keliling sebuah cincin dengan radius ρ dan lebar dρ.
Jadi 9: = 3 45 )67 = 3 2;4=2 <64 = 2; >?@ A>=
2
= B2)@ = BC<)@ .... (28)
di mana d adalah diameter dari poros Iingkaran yang pejal. Bila c atau d diukur dalam meter, maka Ip mempunyai satuan m4 atau mm4,
Dengan menggunakan lambang Ip, untuk momen inersia kutub dari luas lingkaran,
maka Persamaan 3-1 dapat ditulis lebih seksama sebagai
D
EF=
G.2H . . . (2.9)Persamaan ini dikenal sebagai rumus puntiran (torsion formula) untuk poros-poros lingkaran yang menyatakan tegangan geser maksimum dalam bentuk momen puntir perlawanan dari ukuran-ukuran batang. Dalam penggunaan rumus ini, momen puntir dalam dinyatakan dalam newton-meter (N.m), c dalam meter, dan Ip dalam m4 atau mm3. Hal tersebut akan
menghasilkan satuan dari tegangan geser puntir sebagai; IJ. K( )
( A) = LJ)M Atau biasa disebut pascal disingkat Pa dalam satuan SI.
Hubungan yang lebih umum dari persamaan 3-3 untuk tegangan geser pada sebuah titik tertentu pada jarak ρ dari pusat sebuah irisan adalah;
D =
?2D
EF=
G.?H . . . (2.10)Persamaan-persamaan 2.9 dan 2.10 terpakai dengan keampuhan yang sama pada tabung-tabung berpenampang lingkaran. karena penurunan kedua persamaan di atas menggunakan pengandaian yang sama. Kita perlu pula memodifikasikan momen inersia polar (kutub) Ip.
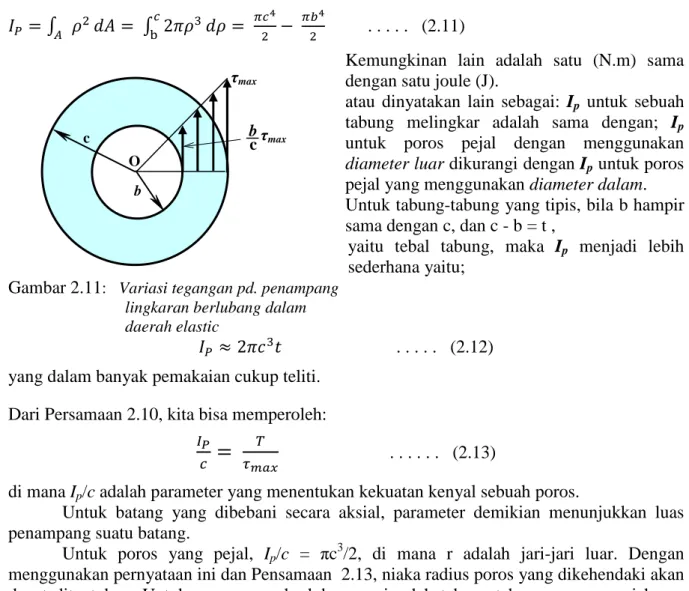
Untuk suatu tabung, seperti dapat dilihat dalam Gambar 2.11, batas-batas integrasi untuk persamaan 2.11 adalah dari b ke c. Jadi untuktabung melingkar;
puntir) (momen ) lengan ( (luas) (tegangan) max A T dA c ====
∫∫∫∫
ρρρρ
ττττ
ρρρρ
18 9: = 3 45 )67 = 3 2;4N2 <64 = B2 @ ) − BO@ ) . . . (2.11)
Kemungkinan lain adalah satu (N.m) sama dengan satu joule (J).
atau dinyatakan lain sebagai: Ip untuk sebuah
tabung melingkar adalah sama dengan; Ip
untuk poros pejal dengan menggunakan
diameter luar dikurangi dengan Ip untuk poros pejal yang menggunakan diameter dalam. Untuk tabung-tabung yang tipis, bila b hampir sama dengan c, dan c - b = t ,
yaitu tebal tabung, maka Ip menjadi lebih
sederhana yaitu; Gambar 2.11: Variasi tegangan pd. penampang
lingkaran berlubang dalam daerah elastic
9: ≈ 2;Q<R . . . (2.12) yang dalam banyak pemakaian cukup teliti.
Dari Persamaan 2.10, kita bisa memperoleh: H
2
=
G
./01 . . . (2.13)
di mana Ip/c adalah parameter yang menentukan kekuatan kenyal sebuah poros.
Untuk batang yang dibebani secara aksial, parameter demikian menunjukkan luas penampang suatu batang.
Untuk poros yang pejal, Ip/c = πc3/2, di mana r adalah jari-jari luar. Dengan menggunakan pernyataan ini dan Pensamaan 2.13, niaka radius poros yang dikehendaki akan dapat ditentukan. Untuk poros yang berlobang, sejumlah tabung-tabung mempunyai harga
Ip/c yang numeniknya sama, hingga soal tersebut akan mempunyai kemungkinan penyelesaian yang tidak berhingga banyaknya.
Berdasarkan definisi, 1 kW adalah kerja untuk 1000 N.m/s. Satu N.m/s adalah sama dengan I watt (W). Juga, ia dapat pula diambil dari dinamika di mana daya adalah sama dengan momen puntir yang dikalikan dengan sudut, diukur dalam radian, di mana poros berputan dalam satuan waktu.
Untuk poros yang berputar dengan frekuensi f Hertz, maka sudut tersebut adalah 2πf
rad/detik. Jadi, bila poros meneruskan momen puntir T yang konstan diukur dalam N.m, maka kerja per satuan waktu adalah 2πT N.m.
Dalam satuan kilowatt akan memberikan;
ST. (1000) UJ. VW = 2; 8 UJ. VW
8 = XYZ [\] IJ. K . . . (2.14)
di mana f adalah frekuensi dalam hertz dari poros yang meneruskan daya dalam kilowatt (kW). Persamaan ini mengubah daya kilowatt yang diberikan kepada poros menjadi suatu momen puntir yang konstan yang terjadi akibat penggunaan daya tersebut.
Bila poros berputar dengan N rpm (putaran per menit), maka Persamaan 2.14 mejadi;
8 =
ZYA= [\^IJ. K
. . . (2.15) O c b τmax c b τmax19 CONTOH 2-1
Pilihlah sebuah poros padat untuk sebuah motor berdaya 8 kW yang bekerja pada frekuensi 30 Hz, Tegangan geser maksimum terbatas pada 55.000 kN/m2.
PENYELESAIAN Dari Persamaan 2.15
Dan dari Persamaan 2.14
Jadi c = 0,00789 m atau d = 2c = 0,0158 m = 15,8 mm.
Untuk praktisnya maka poros dengan d = 16 mm untuk naksud contoh di atas.
CONTOH 2-2
PiIihlah poros-poros padat yang dapat meneruskan daya 200 kW masing-masing tanpa melebihi tegangan geser yang sebesar 70 x 106 N/m2. Salah satu dan ponos ini bekenja dengan putaran 20 rpm dan yang lainnya dengan 20.000 rpm.
PENYELESAIAN
Tãnda huruf indek 1 digunakan untuk poros berkecepatan rendah, sedang tanda huruf indek 2 untuk yang berkecepatan tinggi.
Dari Persamaan 2.15
Dengan cara yang sama T2 = 95,4 Nm Dari Persamaan 2.14
dan d1 = 0,191 m = 191 mm. Dengan cara yang sama d2 = 19,1 mm
Contoh ini melukiskan kecenderungan modern untuk menggunakan mesin-mesin yang berkecepatan tinggi dalam peralatan mekanis.
20
2.3.3 PUNTIRAN PADA KAPAL
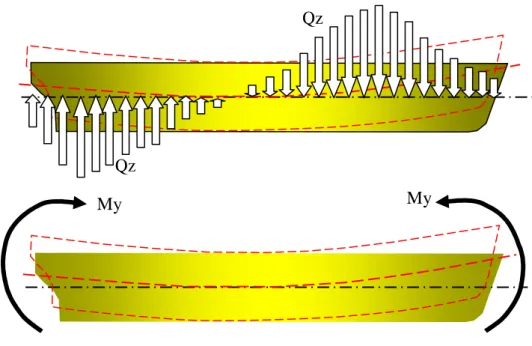
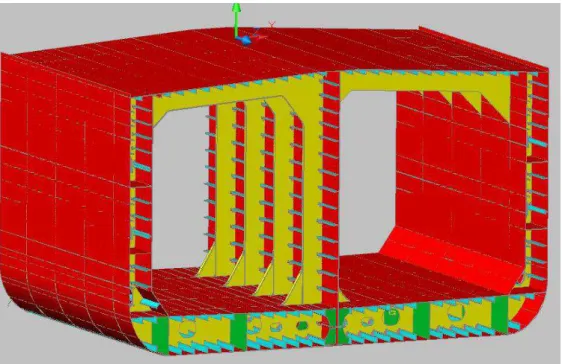
Berbeda dengan poros pejal maupun berlubang, kapal lebih cenderung mirip dengan sebuah balok yang berongga berpenampang BxH dengan penguatan-penguatan di dalamnya. Untuk lebih jelasnya perhatikan ilustrasi tentang penampang kapal yang dipaparkan pada Gambar 2.12, dibawah ini.
Gambar 2.12: Penampang kapal
Selanjutnya bayangkanlah sebuah kapal yang berada diatas gelombang pada posisi cuartering atau serong terhadap gelombang. Maka kapal tersebut akan mengalami beban yang tidak simetris terhadap bidang diametral kapal (bidang center line), sehingga kapal mengalami tekanan air dari bagian bawah kanan depan dan bagian bawah kiri belakang, lihat Gambar 2.13 berikut.
Gambar 2.13: Kapal pada gelombang cuartering
Puncak gelombang.
21 Gambar 2.14: Kapal pada kondisi terpuntir
Pada Gambar 2.14, terlihat bahwa badan kapal mengalami gaya hidrostatik yang besar dibagian kiri belakang dan bagian kanan depan. Gambar dengan garis putus-putus menunjukkan kadaankapal setelah dikenai gaya gelombang serong (quartering seas).
Untuk mengetahui tegangan puntir disepanjang kapal, maka kita harus melakukan:
1. Perhitungan resultante penyebaran gaya berat dan gaya tekan keatas pada setiap penampang lintang dengan jaraknya terhadap centre line, disepanjang kapal.
2. Perhitungan momen puntir pada setiap penampang lintang.
3. Total momen puntir pada penampang lintang sejauh x dari AP, yang merupakan penyebaran momen puntir sepanjang kapal.
Lebih jelasnya perhatikan Gambar 2.15,berikut;
Gambar 2.15: Beban pada penampang buritan dan haluan
z5 z32 f32 f5 Mt5 = f5 x z5 Mt32 = f32 x z32 Mt Mt
22 Keterangan:
f4-5 : Resultan gaya pada penampang di x4-5 f31-32 : Resultan gaya pada penampang di x31-32
z4-5 : Jarak dari Resultan gaya pada penampang di x4-5 terhadap centre line z31-32 : Jarak dari Resultan gaya pada penampang di x31-32 terhadap centre line Mt4-5 : Momen puntir pada penampang di x4-5 terhadap centre line
Mt31-32 : Momen puntir pada penampang di x31-32 terhadap centre line
∑Mt32 : Momen puntir pada penampang di x32 terhadap centre line
∑Mt32 = Mt0-1 + Mt1-2 + Mt2-3 + . . . + Mt32
Selanjutnya untuk menghitung harga tegangan puntir pada penampang x, kita bisa menggunakan rumus 3.3 atau rumus 3.5;
) ( ) ( ). ( ) , ( x I x x M x p t ρ ρ τ =
23
BAB 3
PERHITUNGAN MOMEN LENGKUNG
DAN GAYA LINTANG
3.1 PERSAMAAN DASAR
Dalam pasal ini dianggap bahwa lengkung distribusi gaya berat kapal dan lengkung distribusi gaya tekan keatas sepanjang kapal dapat memenuhi syarat keseimbangan kedua yaitu titik pusat gaya berat dan titik pusat gaya tekan keatas terletak disatu garis vertikal ( satu garis kerja ).
Gambar 3.1: Penyebaran gaya berat dan gaya tekan keatas
Ruas kanan merupakan distribusi memanjang dari beban-beban yang bekerja pada kapal. Dan f(x) merupakan selisih antara gaya tekan keatas dan gaya berat.
Jika lengkung diagram gaya berat kita kurangi dengan lengkung diagram gaya tekan keatas, akan diperoleh lengkung penyebaran beban sepanjang kapal :
f(x) = b(x) – w(x) . . . (3.1)
Gambar 3.2: Penyebaran beban sepanjang kapal dan beban f(x) ini merupakan turunan kedua dari momen lengkung :
b). Penyebaran Gaya Tekan Keatas : b(x) = ρ.g.a(x)
a). Penyebaran Gaya Berat : w(x) = g.m(x)
24
(_) =
CC . . . (3.2)Besar gaya lintang adalah lengkung integral pertama dari beban f(x), oleh karena itu persamaan gaya lintang dapat kita peroleh dari :
Gambar 3.3: Integral beban sepanjang kapal `(_) = 3 (_)= 6_ . . . (3.3)
dimana konstante intergrasi besarnya sama dengan nol, karena Q(0) = 0
Gambar 3.4: Penyebaran Gaya Lintang sepanjang kapal
Sesuai dengan persamaan (3.2), maka diagram momen dapat diperoleh dari integrasi persamaan (3.3) :
a(_) = 3 `(_)6_
== 3 3 (_)6_
= =6_
. . . (3.4)Karena untuk x = 0 ; x = L ( dikedua ujung ) harga momen sama dengan nol , maka besarnya konstanta intergrasi adalah nol.
Q(x)
dx x
f(x)
25 Gambar 3.5: Diagram Gaya Lintang dan Momen Lengkung
Jika diminta juga lenturan kapal, masih harus dilakukan dua kali intergrasi lagi . Dari persamaan differensial garis lentur
dan dengan
η
(x) = J⊗ / J(x), kita dapatkan :b
= −
Xcd⊗
3 a(_). f(_). 6_
=+ g
= . . . (3.5) dimana ϕo = arah garis singgung pada x = 0 .Besar ϕ0 dapat kita menetukan dari hasil intergrasi berikutnya
(_) = −
cdX⊗
3 3 a(_). f(_). 6_. 6_
= =+ g
=. _
. . . (3.6) dengan syarat y(L) = 0 dapat diperoleh;
( ) = −
hi
1
⊗
j j a(_). f(_). 6_. 6_
= =+ g
=.
g
== −
X.
cdX⊗3 3 a(_). f(_). 6_. 6_
= =disini konstantra intergrasi ϕ0 adalah nol jika diambil y(0) = 0
Dari hasil diatas dengan mengganti harga ϕ0 dari persamaan (3.5) dan persamaan (3.6) didapat persamaan sudut lentur dan persamaan lenturan adalah sebagai berikut :
Persamaan sudut lentur ;
b
= −
X cd⊗3 a(_). f(_). 6_
=+
X.
X cd⊗3 3 a(_). f(_). 6_. 6_
= = ... (3.7) Persamaan lenturan ;(_) = −
cdX⊗3 3 a(_). f(_). 6_6_
= =+ .
cdX⊗3 3 a(_). f(_). 6_6_
= =... (3.8) ) ( ) ( ) ( " x EJ x M x y =− Q(x) M(x)
26 bentuk lengkung diagram hasil intergrasi dapat dilihat pada Gambar 3.6.
Gambar 3.6: Diagram Momen lengkung, Sudut lentur, dan Lenturan
Dari Gambar 3.6 juga terlihat bahwa harga o didapat diperoleh dari syarat batas bahwa y’(x) harus berharga nol pada titik dimana lenturan adalah terbesar.
Untuk membantu menyelesaikan persamaan sudut lentur dan lenturan, perlu harga perbandingan η(x) = I⊗
/
I(x) , tetapi karena perbandingan tersebut di ujung-ujung berharga tak terhingga maka kita buat diagram 1/η(x) sebagai terlihat pada Gambar 3.7,berikut :Gambar 3.7: Diagram k
l(m)
Bentuk keadaan dimana beban dan penyebaran memanjang η(x) adalah simetris, maka titik tersebut berimpit dengan titik dimana momen lengkung adalah terbesar.
Dalam praktek, biasanya titik berat dan titik tekan tidak terletak pada satu garis vertikal. Akibatnya, dalam perhitungan ternyata bahwa untuk x = L akan ada momen sisa MR. harga ini harus dihilangkan karena dikedua ujung kapal tidak bisa terjadi momen.
Contoh Soal: ϕ 2 2 1 f(_) η(x) = 1 Sb. y(x) x M(x) ϕ0 L ymax y’(x) y(x) Sb. y’(x)
27 Sebuah Tongkang berlayar diperairan tenang (γ = 1,0 ton/m3), mempunyai ukuran utama seperti terlihat pada gambar berikut :
L = 90 m , H = 14 m , B = 20 m , T = 9 m
• Penyebaran berat tongkang sebesar 0,60 ton/m3, merata diseluruh ruangan dibawah geladak.
• Diatas geladak ada Bangunan Atas setinggi = 3 m, mulai dari station 1 kedepan. 1). Hitunglah Cb (koefisien blok) dan LCB (thd. Midship) dari tongkang tersebut,
dan gambarkan distribusi gaya tekan keatasnya b(x).
2). Hitunglah berat dan panjang bangunan atas ℓ, agar tongkang tetap even keel, 3). Gambarlah diagram distribusi gaya berat w(x),
4). Gambarlah diagram distribusi beban f(x)
5). Hitunglah besarnya gaya lintang (shear force) dan momen lengkung (bending moment) pada penampang yang terletak 70 m didepan AP.
Penyelesaian:
(1) Vol tercelup = Awl x T = {(60x 20) + (30x20)/2} x 9 = 13500 m3 , Displ. = 13500x1 = 13500 ton
Vol kotak = 90x20x9 = 16200 m3
Cb = (vol tercelup)/(vol kotak) = 13500/16200 = 0,833 LCBbag blk = -15 m , LCBbag muka = 25 m
LCB = {(60x 20)x9x(-15) + ½.(30x20)X9x25} : { 13500 } = (-162000 +67500) : 13500 = - 7 m
AAP = A1 = A2 = A3 = 20x9 = 180 m2 bAP = b1 = b2 = b3 = 180 x γair = 180 ton/m Di FP harga bFP = 0 (karena AFP = 0) Grafik penyebaran gaya tekan keatas b(x)
AP 1 2 3 4 FP 180 ton/m 3 m 14 m 9 m AP 1 2 3 4 FP 20 m 25 m 15 m 10 m 20 m 10 m 10m I II 15 m 25 m
ℓ
28 (2) Vol Tongkang = {(60x 20) + (30x20)/2} x 14 = 21000 m3
Berat Tongkang = 21000x0,60 ton/m3 = 12600 ton
Berat Bang Atas = Displ. – Brt Bang Atas = 13500 – 12600 = 900 ton Tongkang even keel, maka LCBBang Atas = LCBtongkang = -7 m
Sehingga panj. Bang Atas = (25 –7)x2 = 36 m (3) Diagram distribusi gaya berat
AAP = A1 = A2 = A3 = 20x14 = 280 m2
wAP = w1 = w2 = w3 = 280 x γTk = 280 x 0,60 = 168 ton/m Berat Bang Atas per sat panj. = (BrtBA)/ ℓ = (900)/36 = 25 ton/m Grafik penyebaran berat w(x)
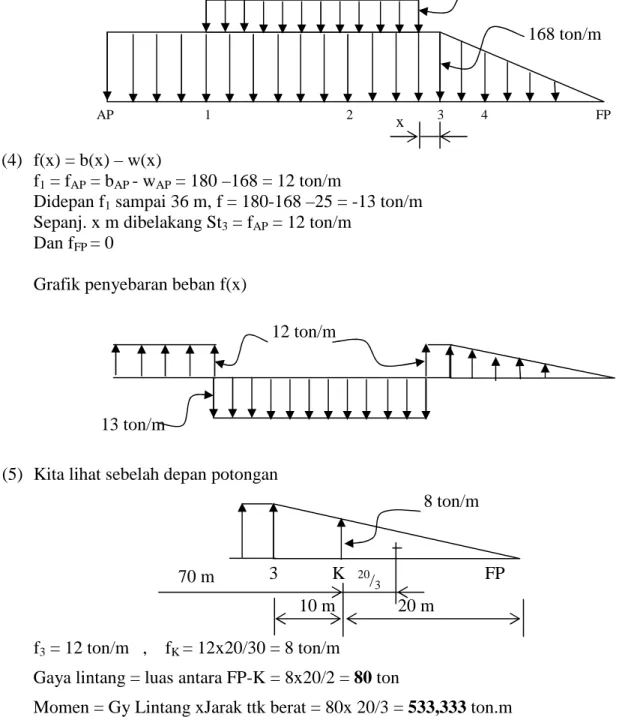
(4) f(x) = b(x) – w(x)
f1 = fAP = bAP - wAP = 180 –168 = 12 ton/m
Didepan f1 sampai 36 m, f = 180-168 –25 = -13 ton/m Sepanj. x m dibelakang St3 = fAP = 12 ton/m
Dan fFP = 0
Grafik penyebaran beban f(x)
(5) Kita lihat sebelah depan potongan
f3 = 12 ton/m , fK = 12x20/30 = 8 ton/m
Gaya lintang = luas antara FP-K = 8x20/2 = 80 ton
Momen = Gy Lintang xJarak ttk berat = 80x 20/3 = 533,333 ton.m
3 K FP 10 m 20 m 8 ton/m 70 m 20 /3 13 ton/m 12 ton/m AP 1 2 3 4 FP 25 ton/m 168 ton/m x
29 3.2 KOREKSI MOMEN UNTUK KAPAL DI AIR TENANG
Adanya kesalahan dalam penggambaran dan dalam pengukuran mungkin mengakibatkan bahwa besar gaya lintang di ujung-unjung kapal tidak nol. Gaya lintang sisa ∆1Q(x) ini dapat diimbangkan atau dikoreksi secara linear jika ∆1Q(x) < 0,03.Qmax lihat Gambar 3.8)
.
Gambar 3.8: koreksi Linear untuk Gaya lintang
Momen sisa juga dapat diimbangi dengan ketelitian yang cukup memadai, dengan memakai cara linear diatas jika ∆MR < 0,06.Mmax (lihat Gambar 3.9).
Gambar 3.9: Koreksi Linear untuk Momen lengkung
Untuk harga gaya lintang sisa ∆2Q(x) yang lebih besar dari harga diatas harus dihapuskan dengan mengoreksi gaya tekan keatas. Demikian juga untuk momen sisa yang lebih besar perlu dilakukan pengimbangan yang lebih teliti. Untuk maksud ini kita bayangkan lengkung gaya tekan keatas dirubah seperti pada Gambar 3.9.
Karena adanya perubahan ini, akan terjadi perubahan gaya lintang sebesar:
∫
∆
=
∆
x odx
x
b
x
Q
(
)
(
)
...
...(
3
.
9
)
2 .Perubahan ini akan menyebabkan perubahan sebesar :
∫∫
∆
=
∆
x o x odx
dx
x
b
x
M
(
)
(
)
. ∆MR Mmax M(x) ∆1QR Qmax Qmax Q(x)30 Setelah penggeseran gaya tekan keatas, maka momen sisa ∆MR pada x = L harus sama
dengan nol.
Gambar 3.10: Koreksi non linear untuk kapal di air tenang.
Maka :
∫∫
∆
=
−
∆
L o x RM
dx
dx
x
b
0)
(
.Untuk e(x) < L/30 penyelesaian persamaan diatas cukup teliti apabila dipergunakan pendekatan berikut : dx db x e x b
≈
∆ ) ( ) (selanjutnya bila diperhatikan bahwa e(x) dapat digantikan oleh harga e rata-rata yang konstan, maka pengintegrasian persamaan diatas dapat dilakukan sebagai terlihat pada persamaan (3.10) berikut ini :
)
10
.
3
(
..
...
)
(
.
.
.
)
(
0 2dx
e
b
x
dx
db
e
x
Q
x=
=
∆
∫
dan∫
= ∆M x x e b x dx 0 ) 11 . 3 ( .. ... . ) ( . ) (Dari syarat bahwa
∫
= − = ∆ L o R e b x dx eD M ( ) . , didapatkan :)
12
.
2
(
...
...
D
M
e
=
−
∆
RJadi ternyata bahwa e ialah besar penggeseran titik tekan. Lengkung tekanan air tidak perlu digantu dengan yang baru, karena perubahan gaya lintang dan momen langsung didapat dari penggeseran titik tekan e dari lengkung gaya tekanan mula-mula b(x).
b(x) e(x) ∆b(x) b(x) b(x) setelah digeser x
31 3.3 PERHITUNGAN INTEGRAL SECARA NUMERIK.
Setelah intensitas gaya berat dan intensitas gaya tekan keatas dihitung berdasarkan teori yang telah dijelaskan didepan, perhitungan berikutnya perlu melakukan proses integrasi.
Karena kurva penyebaran gaya berat dan kurva penyebaran gaya tekan keatas tidak mengikuti suatu persamaan matematis, maka proses integrasi tidak bisa kita lakukan dengan cara matematis. Oleh karena itu, perlu kita mengingat kembali pengertian fisik dari integral. Marilah kita perhatikan grafik f(x) yang harus diintegralkan dari x0 sampai x1 seperti terlihat pada Gambar 3.11, berikut :
Gambar 3.11: Integral f(x) dari x0 sampai x1
Integral f(x) dari x0 sampai x1 = luas bidang yang dibatasi oleh f(x) dan sumbu x dari x0 sampai x1
Karena melakukan integrasi sama dengan menghitung luasan, maka grafik penyebaran beban kapal dibagi menjadi sejumlah station (misalnya 40 station sehingga diperoleh 41 titik atau jumlah lain yang dipilih), maka langkah berikutnya adalah menghitung intensitas rata-rata gaya berat dan intensitas rata-rata gaya tekan keatas.
Perubahan gaya berat dan gaya tekan keatas menjadi harga rata-rata ini bisa dilakukan dengan menggunakan Tabel 3.1, dan Tabel 3.2, berikut:
Tabel 3.1: Perubahan gaya berat menjadi bentuk tangga No. Station w(x) w(x)rata-rata AP w0 w0-1 = 1/2 (w0 + w1) 1 w1 w1-2 = 1/2 (w1 + w2) 2 w2 w2-3 = 1/2 (w2 + w3) 3 w3 dan seterusnya x1 x0 x f(x) f(x)
32 Tabel 3.2: Perubahan gaya tekan keatas menjadi bentuk tangga
No. Station b(x) b(x)rata-rata AP b0 b0-1 = 1/2 (b0 + b1) 1 b1 b1-2 = 1/2 (b1 + b2) 2 b2 b2-3 = 1/2 (b2 + b3) 4 b4 dan seterusnya
Selanjutnya kedua harga rata-rata ini dijumlahkan untuk mendapatkan resultan penyebaran beban f(x) yang bekerja pada kapal.
3.4 PERHITUNGAN GAYA LINTANG DAN MOMEN LENGKUNG SECARA
NUMERIK
Setelah intensitas beban kita rubah menjadi berbentuk tangga perhitungan lanjutannya dilakukan dalam bentuk tabel. Tabel perhitungan kita susun berdasarkan proses integrasi untuk memperoleh gaya lintang dan momen lengkung sepanjang kapal.
3.4.1 Perhitungan penyebaran gaya lintang Q(x) :
Gambar 3.12: Grafik beban f(x)
∫
= x f x dx x Q 0 ) ( ) ( Q1 = ℓ.f0-1 Q2 = ℓ.f0-1 + ℓ.f1-2 Q3 = ℓ.f0-1 + ℓ.f1-2 + ℓ.f2-3 Q4 = ℓ.f0-1 + ℓ.f1-2 + ℓ.f2-3 + ℓ.f3-4 dan seterusnya akan diperoleh :Q(x) = ℓ.Σf(x) 5 4 3 2 1 AP f(x)
33
3.4.2 Perhitungan penyebaran momen lengkung M(x) :
Gambar 3.13: Grafik gaya lintang Q(x)
∫
= xQ x dx x M 0 ) ( ) ( M1 = 1/2.ℓ.Q1 = 1/2.ℓ .( ℓ.f0-1) M2 = M1 + ℓ(Q1 + Q2)/2 = 1/2.ℓ (ℓ.f0-1) + ℓ .[ (ℓ.f0-1) + {( ℓ.f0-1) + (ℓ.f1-2)}]/2 M2 = 1/
2. ℓ 2 .{ 3.(f0-1) + 1.(f1-2) } M3 = M2 + ℓ(Q2 + Q3)/2 = 1/2. ℓ (ℓ.f0-1) + ℓ .[ (ℓ.f0-1) + {(ℓ.f0-1) + (ℓ.f1-2)}]/2 + ℓ .[{(ℓ.f0-1)+(ℓ.f1-2)} + {(ℓ.f0-1)+(ℓ.f1-2)+(ℓ.f2-3)}]/2 M3 = 1/
2. ℓ2 .{ 5.(f0-1) + 3.(f1-2) + 1.(f2-3)} M4 = M3 + ℓ(Q3 + Q4)/2 = 1/2.ℓ (ℓ.f0-1) + ℓ .[ (ℓ.f0-1) +{( ℓ.f0-1)+ (ℓ.f1-2)}]/2 + ℓ .[{(ℓ.f0-1)+(ℓ.f1-2)} +{(ℓ.f0-1)+(ℓ.f1-2)+(ℓ.f2-3)}]/2 + ℓ.[{(ℓ .f0-1)+(ℓ.f1-2)+(ℓ .f2-3)} +{(ℓ.f0-1)+(ℓ.f1-2) +(ℓ.f2-3)+(ℓ.f3-4)}]/2 M4 = 1/
2.ℓ 2 .{ 7.(f0-1) + 5.(f1-2) + 3.(f2-3) + 1.(f3-4)} dan seterusnya akan diperoleh :M(x) = 1
/
2.ℓ2
.
ΣΣΣΣΣΣΣΣ
f(x)Dengan berdasar pada rumus hasil perubahan integrasi diatas, maka kita dapat menyusun tabel perhitungan momen lengkung dan gaya lintang seperti terlihat pada Tabel 3.3.
5 4 3 2 1 AP Q(x)
34 Tabel 3.3: Perhitungan momen lengkung dan gaya lintang
No. Station b(x) w(x) f(x) ΣΣΣΣf(x) ΣΣΣΣΣΣΣΣf(x) 1 2 3 4 5 6 0-1 b0-1 w0-1 f0-1 = b0-1 - w0-1 f0-1 f0-1 1-2 b1-2 w1-2 f1-2 = b1-2 - w1-2 f0-1+ f1-2 3f0-1+ f1-2 2-3 b2-3 w2-3 f2-3 = b2-3 - w2-3 f0-1+ f1-2 +f2-3 5f0-1+3f1-2 +f2-3 3-4 b3-4 w3-4 f3-4 = b3-4 – w3-4 39-FP Σf39-FP ΣΣf39-FP Catatan :
w(x) adalah gaya berat, jadi berharga negatif. b(x) adalah gaya tekan keatas, berharga positif.
35
3.4.3 Tabel Untuk Koreksi Linier
Sebagai balok bebas, gaya lintang dikedua ujung harus berharga nol. Jika kesalahan QFP kurang dari atau sama dengan 0,03.Qmax atau kesalahan Σf39-FP kurang dari atau sama dng 0,03.Σf max , maka kesalahan Q(x) ini dapat dikoreksi secara linier seperti telah diterangkan didepan. Seperti halnya untuk harga gaya lintang , sebagai balok bebas, momen lengkung dikedua ujung harus juga berharga nol. Dalam hal ini pun MFP tidak selalu mempunyai harga sama dengan nol. Jika MFP kurang dari atau sama dengan 0,06.Mmax , maka kesalahan momen lengkung dapat juga dikoreksi secara linier seperti dalam koreksi linier pada Q(x).
Koreksi linier yang diperlihatkan dalam Tabel 3.4 kita susun sebagai lanjutan Tabel 3.3. Apabila Σf39-FP ada kesalahan, maka pada kolom 6 dipergunakan untuk koreksi ΣΣΣΣf(x), kolom 7 dipergunakan untuk hasil Σf(x) setelah koreksi, dan kolom 8 untuk perhitungan ΣΣΣΣΣΣΣΣf(x). Selanjutnya jika pada kolom 8 diperoleh harga ΣΣf39-FP = 0 , perhitungan telah selesai dan tabel ditutup sampai dengan kolom 8, tetapi jika harga ΣΣΣΣΣΣΣΣf39-FP≠ 0 , kolom 9 dipergunakan untuk koreksi ΣΣΣΣΣΣΣΣf(x) dan kolom 10 dipergunakan untuk hasil momen setelah koreksi.
Tabel 3.4: Koreksi linier
No Station Σf(x) ∆Σf(x)= - x