BAB I BAB I
PENDAHULUAN PENDAHULUAN 1.1.
1.1. Latar BelakangLatar Belakang
Zaman modern sekarang ini banyak sekali teknologi baru yang tercitakan. Tujuan Zaman modern sekarang ini banyak sekali teknologi baru yang tercitakan. Tujuan dari pembuatan teknologi tersebut tidak lain hanya untuk memperingankan pekerjaan dari pembuatan teknologi tersebut tidak lain hanya untuk memperingankan pekerjaan manusia Pada dasarnya tekhnologi sekarang ini merupakan perkembangan tekhnologi manusia Pada dasarnya tekhnologi sekarang ini merupakan perkembangan tekhnologi dari masa lalu. Sebagai contoh terciptanya
dari masa lalu. Sebagai contoh terciptanya UAV UAV ((Unmanned Aerial VehicleUnmanned Aerial Vehicle).). UnmannedUnmanned Aerial
Aerial Vehicle Vehicle (UAV)(UAV) adalah salah satu jenis robot penjelajah udara tanpa awak.adalah salah satu jenis robot penjelajah udara tanpa awak. Unmanned Aerial Vehicle (UAV)
Unmanned Aerial Vehicle (UAV) juga juga sering sering disebut disebut dengan dengan namanama Pesawat Pesawat Udara Udara NirNir Awak
Awak (PUNA)(PUNA).. Unmanned Aerial VehicleUnmanned Aerial Vehicle (UAV)(UAV) merupakan kendaraan udara tanpa merupakan kendaraan udara tanpa awak (pilot pengendali) di dalamnya. Karena tidak memiliki awak,
awak (pilot pengendali) di dalamnya. Karena tidak memiliki awak, UAVUAV harusharus dikendalikan dari jarak jauh menggunakan remote control dari luar kendaraan atau biasa dikendalikan dari jarak jauh menggunakan remote control dari luar kendaraan atau biasa disebut
disebut Remotely Remotely Piloted Piloted Vehicle Vehicle (RPV)(RPV).. Selain itu, UAV juga dapat bergerak secara Selain itu, UAV juga dapat bergerak secara otomatis berdasarkan program yang sudah ditanamkan pada sistem komputernya.
otomatis berdasarkan program yang sudah ditanamkan pada sistem komputernya. Terciptanya
Terciptanya Unmanned Aerial Vehicle (UAV)Unmanned Aerial Vehicle (UAV) mempunyai banyak sekalimempunyai banyak sekali manfaatnya
manfaatnya seperti sebagai seperti sebagai Aerial Aerial Photography, Photography, Monitoring Monitoring Wilayah Wilayah dll. dll. UntukUntuk menunjang kinerja dari dibutuhkan alat-alat yang canggih dan otomatis. Hampir semua menunjang kinerja dari dibutuhkan alat-alat yang canggih dan otomatis. Hampir semua Unmanned Aerial Vehicle (UAV)
Unmanned Aerial Vehicle (UAV) terdapat kamera sebagai penangkap gambar. Untukterdapat kamera sebagai penangkap gambar. Untuk meletakan kamera tersebut dibutuhkan tempat yang bisa dikontrol dengan remote. meletakan kamera tersebut dibutuhkan tempat yang bisa dikontrol dengan remote. Tempat tersebut sering disebut gimbal. Gimbal yang ada dipasaran mempunyai harga Tempat tersebut sering disebut gimbal. Gimbal yang ada dipasaran mempunyai harga yang relative mahal karena terdapat controller dan motor brushless. Tetapi untuk yang relative mahal karena terdapat controller dan motor brushless. Tetapi untuk membuat gimbal kamera bisa memanfaatkan potensiometer sebagai sensor sudut. Dengan membuat gimbal kamera bisa memanfaatkan potensiometer sebagai sensor sudut. Dengan mikrokontroller Arduino UNO dan output berupa servo.
mikrokontroller Arduino UNO dan output berupa servo.
Berdasarkan latar belakang tersebut dibuatlah prototype Potensiometer sebagai Berdasarkan latar belakang tersebut dibuatlah prototype Potensiometer sebagai sensor sudut pada gimbal kamera. Terciptanya prototype Potensiometes sebagai sensor sensor sudut pada gimbal kamera. Terciptanya prototype Potensiometes sebagai sensor sudut pada gimbal kamera diharapkan bisa mengetahui karakteristik potesiometer sebagai sudut pada gimbal kamera diharapkan bisa mengetahui karakteristik potesiometer sebagai sensor sudut dan menciptakan tekhnologi dengan menggunakan sensor sudut serta sensor sudut dan menciptakan tekhnologi dengan menggunakan sensor sudut serta menghasilkan nilai jual yang tinggi.
menghasilkan nilai jual yang tinggi.
1.2.
1.2. Rumusan MasalahRumusan Masalah
Berdasarkan latar belakang masalah, maka dapat dirumukan permasalahan Berdasarkan latar belakang masalah, maka dapat dirumukan permasalahan sebagai berikut :
sebagai berikut : 1.
1. Bagaimana rancangan rancangan alat Potensiometer sebagai sensor sudutBagaimana rancangan rancangan alat Potensiometer sebagai sensor sudut pada gimbal kamera?
1.3 Tujuan
Beberapa tujuan yang ingin dicapai dalam pelaksanaan proyek ini,yaitu :
1. Menghasilkan Prototype berupa Potensiometer sebagai sensor sudut pada gimbal kamera
2. Mengetahui dan memahami karakteristi potensiometer sebagai sensor sudut 1.4 Manfaat
Adapun manfaat dari proyek ini adalah terciptanya prototype Potensiometer sebagai sensor sudut pada gimbal kamera. Prototype ini terdiri dari Potensiometer dengan dilengkapi motor servo type standard yang dapat melakukan pergerakan sebesar 180° dan menggunakan Arduino Uno sebagai controller untuk menkonversikan sinyal analog yang dikeluarkan oleh sensor. Prototype ini juga dilengkapi bracket sebagai tempat servo.
Selain itu melalui proyek ini dapat mengetahui karakteristik dari potensiometer sebagai sensor sudut. Karakteristik tersebut meliputi akurasi, presisi,error, linieritas, sensitivitas dari potensiometer sebagai sensor sudut. Setelah mengetahui karakteristik potensiometer sebagai sensor sudut diharapkan bisa mengembangkan tekhnologi baru
BAB II KAJIAN TEORI 2.1 Potensiometer
Dalam Peralatan Elektronik, sering ditemukan Potensiometer yang berfungsi sebagai pengatur Volume di peralatan Audio / Video seperti Radio, Walkie Talkie, Tape Mobil, DVD Player dan Amplifier. Potensiometer juga sering digunakan dalam Rangkaian Pengatur terang gelapnya Lampu (Light Dimmer Circuit) dan Pengatur Tegangan pada Power Supply (DC Generator).
Potensiometer (POT) adalah salah satu jenis Resistor yang Nilai Resistansinya dapat diatur sesuai dengan kebutuhan Rangkaian Elektronika ataupun kebutuhan pemakainya. Potensiometer merupakan Keluarga Resistor yang tergolong dalam Kategori Variable Resistor. Secara struktur, Potensiometer terdiri dari 3 kaki Terminal dengan sebuah shaft atau tuas yang berfungsi sebagai pengaturnya. Gambar dibawah ini menunjukan Struktur Internal Potensiometer beserta bentuk dan Simbolnya.
Gambar 1. Jenis Potensiometer (Sumber :teknikeletronika.com)
2.2 Mikrokontroler Arduino UNO
Arduino UNO adalah sebuah board mikrokontroler yang didasarkan pada ATmega328 (datasheet). Arduino UNO mempunyai 14 pin digital input/output (6 di antaranya dapat digunakan sebagai output PWM), 6 input analog, sebuah osilator Kristal 16 MHz, sebuah koneksi USB, sebuah power jack, sebuah ICSP header, dan sebuat tombol reset. Arduino UNO memuat semua yang dibutuhkan untuk menunjang mikrokontroler, mudah menghubungkannya ke sebuah computer dengan sebuah kabel USB atau mensuplainya dengan sebuah adaptor AC ke DC atau menggunakan baterai untuk memulainya.
Arduino Uno berbeda dari semua board Arduino sebelumnya, Arduino UNO tidak menggunakan chip driver FTDI USB-to-serial. Sebaliknya, fitur-fitur Atmega16U2 (Atmega8U2 sampai ke versi R2) diprogram sebagai sebuah pengubah USB ke serial. Revisi 2 dari board Arduino Uno mempunyai sebuah resistor yang menarik garis 8U2 HWB ke ground, yang membuatnya lebih mudah untuk diletakkan ke dala m DFU mode.
Gambar 2. Arduino UNO (Sumber :google.com)
2.3 Micro Servo MG90
Motor servo adalah sebuah perangkat atau aktuator putar (motor) yang dirancang dengan sistem kontrol umpan balik loop tertutup (servo), sehingga dapat di set-up atau di atur untuk menentukan dan memastikan posisi sudut dari poros output motor. motor servo merupakan perangkat yang terdiri dari motor DC, serangkaian gear, rangkaian kontrol dan potensiometer. Serangkaian gear yang melekat pada poros motor DC akan memperlambat putaran poros dan meningkatkan torsi motor servo, sedangkan potensiometer dengan perubahan resistansinya saat motor berputar berfungsi sebagai penentu batas posisi putaran poros motor servo.
Gambar 3. MicroServo MG90 (Sumber :indo-ware.com)
2.4 Penelitian yang Relevan
Penelitian yang dilakukan oleh Rachmat,dkk.,2015 dengan judul “Rancang Bangun Alat Pengukur Sudut Menggunakan Potensiometer Multiturn” menyatakan bahwa pengukuran dilakukan dari sudut 0° hingga 180° mempunyai karakterisiti yang linier dengan R 2=0.9996 untuk menghasilkan tegangan setiap perubahan sudut 5. Sehingga potensiometer multiturn dapat digunakan sebagai sensor sudut angular untuk diaplikasikan pada system pengukur sudut tekuk lutut. Penelitian tersebut berhasil tetapi masih ada kekurangan dalam hal penyampaian latarbelakang.
Penelitian yang dilakukan oleh Safrianti,dkk.,2012 menyatakan bahwa potensiometer jenis multiturn memiliki nilai resistansi potensimeter tidak mencapai nilai
lebih dari 1000 ohm ketika sudut mencapai 30°.
Penelitian yang dilakukan oleh Triwibowo dkk.,2011 menyatakan bahwa potensiometer dengan satu putaran juga sudah pernah digunakan sebagai sensor posisi cannon pada model tank militer, Namun potensiometer ini juga hanya dapat digunakan dengan ketelitian sudut sekitar 30°. Faktor-faktor inilah yang menyebabkan dibuatnya potensiometer sebagai sensor sudut pada gimbal kamera untuk mengetahui karakteristik
dari potensiometer tersebut 2.5 Kerangka Pikir
Perpaduan antar potensiometer , Arduino UNO dan servo bisa dikembangkan menjadi sebuah perangkat yang dapat menjadi solusi. Pemilihan komponen yang baaik dan benar harus diperhatikan supaya perangkat berjalan dengan baik. Pembuatan perangkat tersebut harus melalui tahapan-tahapan diantaranya : (1) analisis kebutuhan;
(2) perancangan; (3) pembuatan; dan (4) Ujicoba, diharapkan dapat menghasilkan suatu prototype potensiometer sebagai sensor sudut pada gimbal kamera.
BAB III HASIL 3.1 Analisis Kebutuhan
a. Permasalahan
Penggunaan gimbal kamera menggunakan potensiometer sebagai sensor posisi sudut masih jarang dipergunakan dan juga belum banyak yang memproduksi serta belum memanfaatkan potensiometer sebagai sensor sudut. b. Solusi
Pembuatan Protoype Potensiometer sebagai sensor sudut pada gimbal kamera merupakan solusi untuk memanfaatkan potensiometer sebagai sensor sudut.
c. Konsep Kerja Perangkat
Blok Diagram
Gambar 4. Blok Diagram
Penjelasan dari masing-masing blok adalah sebagai berikut : 1. Sudut adalah sebagai input
2. Sensor Sudut menggunakan potensiometer
3. Controller mengunakan Arduino UNO sebagai pengontrol utama system
4. Servo sebagai output
Cara Kerja Secara Umum
Dalam prototype ini digunakan potensiometer sebagai sensor sudut. Keluaran potensiometer berupa sinyal analog yang kemudian masuk ke pin analog arduino uno didalam arduino uno diconversikan menjadi sinyal digital. Sinyal digital tersebut dikeluarkan melalui port A dari arduino uno. Sinyal digital tersebut masuk kedalam servo yang berfungsi untuk memutar servo tersebut
d. Kebutuhan Perangkat
Sensor Posisi : Potensiometer rotary, Potensiometer slider,
Potensiometer trimer dsb. Diantara sensor sudut tersebut dipilih Potensiometer rotary karena potensiometer ini berputar sesuai dengan sudut yang diinginkan
Controller : Arduino UNO,Arduino Nano, Arduino Mega dsb.
Diantara controller tersebut dipilih arduino UNO karena penggunaan yang mudah dan mempunyai pin yang cukup serta harga yang relative murah
Servo : Diantara servo tersebut dipilih servo mg90 karena
servo ini berukuran kecil dan mudah didapat serta mudah digunakan
Bracket : Pemilihan bracket disesuaikan dengan servo yang
digunakan supaya penggunaan lebih presisi
e. Spesifikasi Komponen
Potensiometer
Resistance range : 100Ω – 100K Ω Standard Range : ±5%
Residual Resistance : 20 ohm max Input Voltage max : 500 Vac max Sliding Noise : 100mV max
Dielectric Strength : 500 Vac, I minute Power Rating : 2 Watt
Temperature Range : -20°C + 70°C
Arduino UNO
Microcontroller : ATmega328 Operating Voltage : 5V
Input Voltage (recom): 7-12V Input Voltage (limits) : 6-20V
Digital I/O Pins : 14 (of which 6 provide PWM output) Analog Input Pins : 6
Flash Memory : 32 KB (ATmega328) of which 0.5 KB used by bootloader SRAM : 2 KB (ATmega328) EEPROM : 1 KB (ATmega328) Clock Speed : 16MHz Servo Weight : 14g Dimension : 23*12.2*29mm Stall torque : 2.2kg/cm(4.8V )2.5kg/cm(6V)
Operating speed : 0.11sec/60degree(4.8v), 0.10sec/60degree(6v) Operating voltage : 4.8-6.0V
Dead band width : 10us
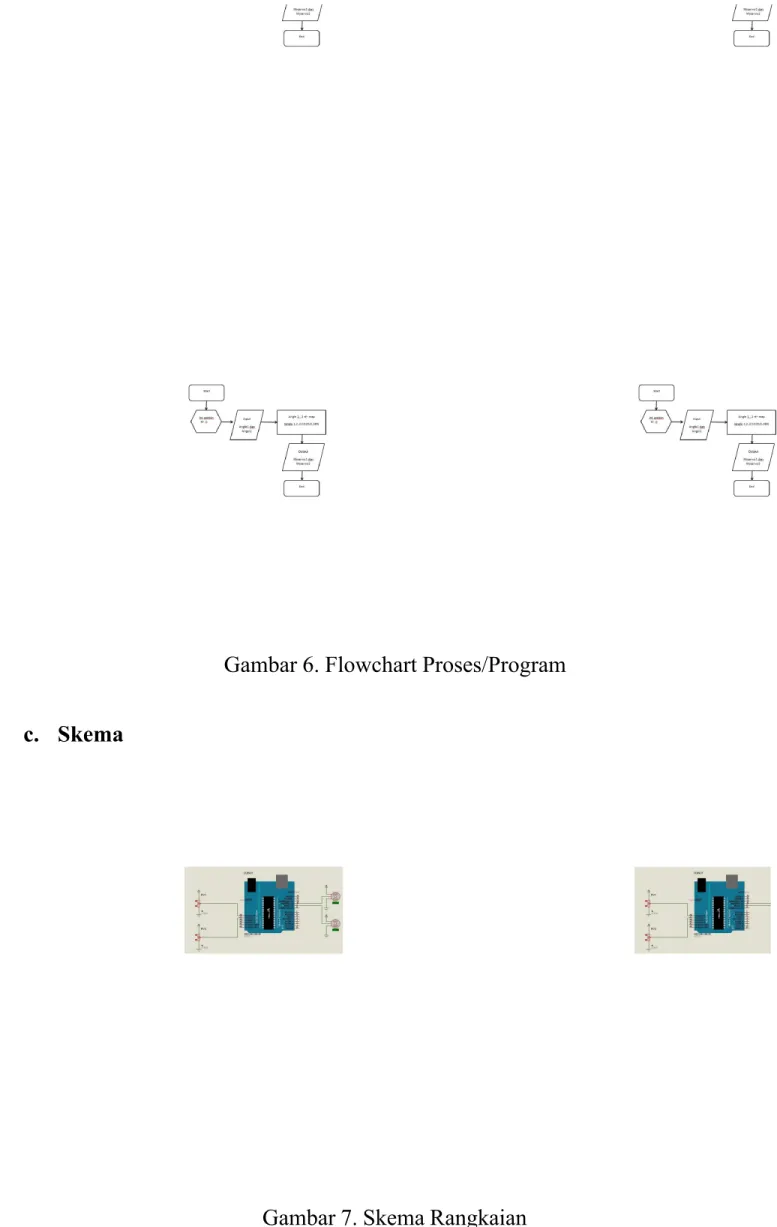
3.2 Perancangan
a. Flowchart Sistem
b. Flowchart Proses/Program
Gambar 6. Flowchart Proses/Program
d. Desain Pengemasan
Gambar 8. Box pengemasan
Gambar 9. Bracket Servo
3.3 Pembuatan
a. Pemilihan Komponen
Pada saat pemilihan komponen dipilih komponen yang mempunyai nilai linearitas tinggi dengan hara yang terjangkau serta mudah didapatkan. Tidak hanya itu pemilihan komponen juga disesuaikan dengan kebutuhan
b. Pembuatan desain /Perancangan system
Pada proses perancangan system, merancang bagaimana potensiometer sebagai sensor sudut pada gimbal kamera berfungsi dengan baik. Mendesain rangkaian elektronik pada Proteus kemudian disimulasikan. Serta mendesain box sesuai dengan kegunaan
c. Perakitan Komponen
Setelah desain selesai, dilakukan proses perakitan potensiometer, Arduino UNO dan servo dengan benar sesuai dengan rancangan system, sehingga dapat bekerja dengan efektif, efisien dan ideal.
d. Pengkodean
Pada tahap ini dibuat pengkodean pada controller yang berisi perintah dan konfigurasi parameter untuk mengendalikan potensiometer dan servo. Sehingga dapat bekerja secara terintegrasi dan sesuai dengan yang diharapkan.
3.4 Uji Coba
No Uji Coba Hasil Keterangan
1 Menghidupkan Perangkat Motor servo bergerak 2 Memutar Potensiometer Motor servo berputar 3 Menguji motor servo Motor servo baik 4 Uji coba Arduino UNO Berfungsi dengan baik
Tabel.1 Uji Coba Perangkat
BAB IV SIMPULAN 4.1 Kesimpulan
Kesimpulan yang dapat diambil dari proyek ini adalah sebagai berikut:
a. Terciptanya prototype Potensiometer sebagai sensor sudut pada gimbal kamera. Didalam prototype terdiri dari 3 komponen utama yaitu Potensiometer , Arduino UNO , dan Motor servo.
b. Adapun karakteristik dari potensiometer sebagai sensor sudut pada gimbal kamera adalah error 2,12%, akurasi 97,87 % presisi 1.03, linieritas 0,87I + 0.5 , dan sensitivitas 0,8
4.2 Keterbatasan
Keterbatasan dari proyek ini adalah :
a. Proyek ini tidak mengukur error, presisi, akurasi, linieritas dan sensitivitas dari servo tetapi hanya potensiometer.
b. Poyek ini masih menggunakan servo dengan gear plastic belum menggunakan gear metal sehingga penggunaan gear plastic hanya dibatasi sampai titik
4.3 Saran
Untuk memperbaiki kinerja dari prototype Potensiometer sebagai sensor sudut pada gimbal kamera dan pengembangan lebih lanjut disarankan :
a. Penggunaan Potensiometer yang efisien dan efektif serta pemilihan servo yang disesuaikan dengan kamera yang diinginkan
DAFTAR PUSTAKA
Anonim . 2013. “ Unmanned Aerial Vehicle”. http://zonaelektro.net/unmanned-aerial-vehicle-uav/. Diakses pada tanggal 20 Desember 2016.
Anonim . 2015. “ Pengertian Fungsi Potensiometer” .http://teknikelektronika.com/pengertian-fungsi-potensiometer/ Diakses pada tanggal 20 Desember 2016.
Anonim. 2016. “ Reading a Potensiometer ( analog input)”. https://www.arduino.cc/en/ tutorial /potentiometer. Diakses pada tanggal 3 Desember 2016.
Anonim. 2016. “Arduino UNO R3” .http://buaya-instrument.com/arduino-uno-r3-0601030 005.html . Diakses pada tanggal 22 Desember 2016.
Atama, D. 2011. “Analog Input dan Output pada Arduino ”. http://dendiatama.blogspot.co. id/2011/09/ analog-input-dan -output- pada-arduino.html. Diakses pada tanggal 22 Desember 2016.
Hendri, H. 2013 “Pengenalan Arduino UNO “ . http://belajar-dasar-pemrograman.blogspot. co.id/2013/03/arduino-uno.html. Diakses pada tanggal 29 November 2016.
Rahmat, H. 2015. Rancang Bangun Alat Pengukut Sudut Menggunakan Potensiometer Multiturn . Surabaya : ITENAS.
Trikueni.2014 .”Desain Sistem Kontrol “.http://trikueni-desain-sistem.blogspot.co.id/2014/03 /Pengertian-Motor-Servo.html.Diakses pada tanggal 10 Desember 2016