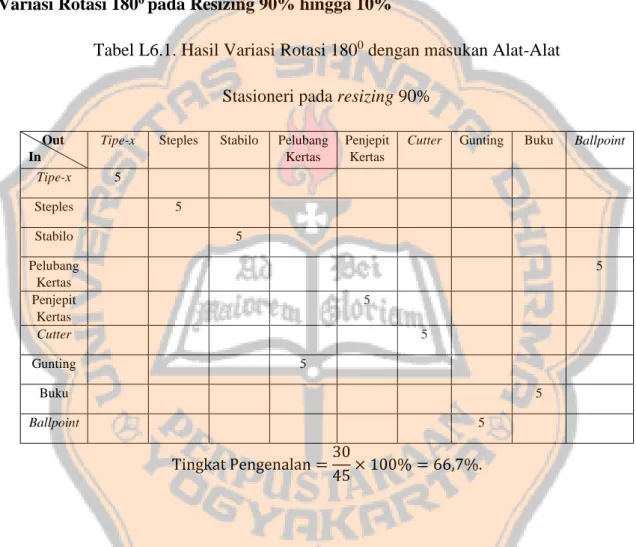
Pengenalan alat-alat stasioneri menggunakan ekstraksi ciri tanda tangan kontur
Bebas
166
0
0
Teks penuh
(2) PLAGIAT MERUPAKAN TINDAKAN TIDAK TERPUJI. FINAL PROJECT. RECOGNITION OF STATIONERY TOOLS USING CONTOUR SIGNATURE FEATURE EXTRACTION In a partial fulfilment of the requirements for the degree of Sarjana Teknik Department of Electrical Engineering Faculty of Science and Technology, Sanata Dharma University. By:. FRANSISKUS PURNAWANTO NIM : 145114042. DEPARTMENT OF ELECTRICAL ENGINEERING FACULTY OF SCIENCE AND TECHNOLOGY SANATA DHARMA UNIVERSITY YOGYAKARTA 2018. ii.
(3) PLAGIAT MERUPAKAN TINDAKAN TIDAK TERPUJI. iii.
(4) PLAGIAT MERUPAKAN TINDAKAN TIDAK TERPUJI. iv.
(5) PLAGIAT MERUPAKAN TINDAKAN TIDAK TERPUJI. v.
(6) PLAGIAT MERUPAKAN TINDAKAN TIDAK TERPUJI. HALAMAN PERSEMBAHAN. MOTTO: Lakukan Sesuatu Dengan Hati!. Dipersembahkan kepada ... Tuhan Yang Maha Esa Keluarga Besar Beserta Teman-Teman. vi.
(7) PLAGIAT MERUPAKAN TINDAKAN TIDAK TERPUJI. vii.
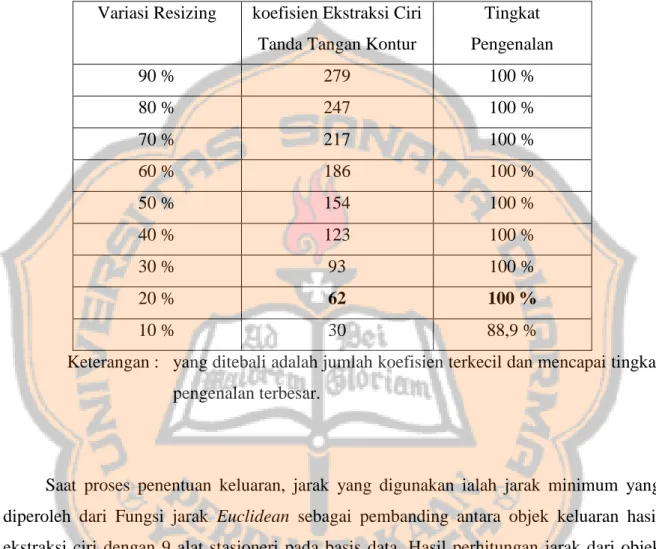
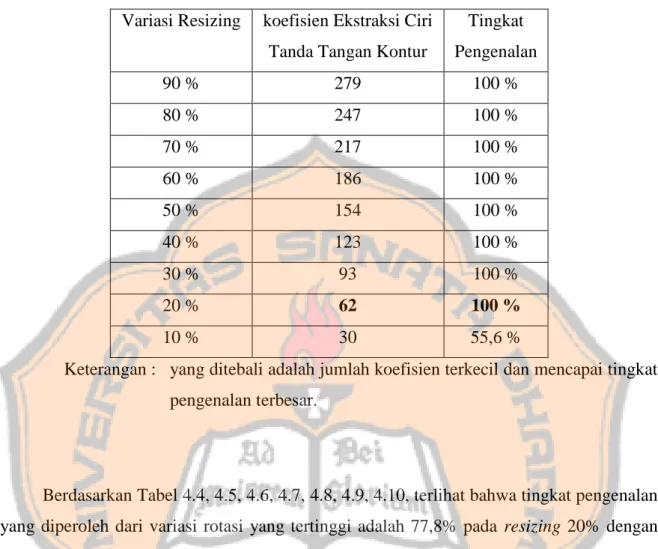
(8) PLAGIAT MERUPAKAN TINDAKAN TIDAK TERPUJI. INTISARI Di era modern, perkembangan teknologi robot berkembang pesat. Industri – industri modern memanfaatkan teknologi robot untuk mempercepat proses produksi dan meningkatkan produktivitas produksi. Oleh karena itu, teknisi yang bekerja harus sigap menggunakan dan mengambil berbagai peralatan. Tentu saja hal tersebut mengakibatkan tenaga dan waktu tidak berjalan efektif dan efisien. Menyikapi hal tersebut pada tugas akhir ini akan dibuat sistem yang dapat meniru kemampuan mata manusia untuk dapat mengenali dan membandingkan objek berupa macam-macam alat-alat stasioneri. Pada tugas akhir ini, sistem pengenalan alat-alat stasioneri secara real time dibuat menggunakan webcam dan laptop. Secara garis besar beberapa proses kerja dari sistem ini ialah preprocessing, ekstraksi ciri tanda tangan kontur, fungsi jarak Euclidean dan kemudian program akan menampilkan hasil pengenalan ke layar monitor berupa text. Sistem pengenalan tanda tangan kontur secara real time berhasil dibuat dan berjalan dengan baik. Hasil pengujian nilai koefisien tanda tangan terkecil dengan tingkat pengenalan terbaik yaitu sejumlah 62 dengan persentase tingkat pengenalan mencapai 100%.. Kata kunci: Webcam, laptop, preprocessing, tanda tangan kontur, jarak Euclidean. viii.
(9) PLAGIAT MERUPAKAN TINDAKAN TIDAK TERPUJI. ABSTRACT In this modern era, the improvement of robot technology is very fast. Lot of industries are using robot technology for production sector and also to increase the productivity. In fact, the technicians must be ready to use and take various kinds of equipment. That situation of course could wasting time and also energy and would be not effective. However because of this situation, the author here will make a system to imitate human’s eyes that can recognize and compare every tools of stationery equipments. On this thesis, the system to recognize stationery equipments in real time is created using webcam and laptop. Generally the process of how this system working are preprocessing, extraction of contour signature system, the Euclidean distance function and then the program would be showing the result on the monitor screen in the form of text. The extraction of contour signature system in real time is already created and working successfully. the results of testing the smallest hand signatures coefficient with the best level of recognition, which is 62 with the percentage of the level of exposure that is reaching 100%.. Keywords: Webcam, Laptop, preprocessing, contour signature, Euclidean distance.. ix.
(10) PLAGIAT MERUPAKAN TINDAKAN TIDAK TERPUJI. KATA PENGANTAR Puji dan syukur penulis panjatkan kehadirat Tuhan yang Maha Esa, karena berkat limpahan rahmat dan kasih-Nya maka tugas akhir ini dapat diselesaikan. Tugas akhir yang berjudul “Pengenalan Alat-Alat Stasioneri Menggunakan Ekstraksi Ciri Tanda Tangan Kontur” ini disusun untuk memenuhi persyaratan kurikulum sarjana strata-1 (S-1) pada Jurusan Teknik Elektro, Fakultas Sains dan Teknologi, Universitas Sanata Dharma. Atas semua bantuan yang telah diberikan, baik secara langsung maupun tidak langsung selama penyusunan tugas akhir ini hingga selesai, penulis mengucapkan terima kasih yang sebesar-besarnya kepada : 1. Tuhan yang Maha Esa yang selalu melimpahkan rahmat dan kasih-Nya. 2. Dekan Fakultas Sains dan Teknologi Universitas Sanata Dharma Yogyakarta. 3. Ketua Program Studi Teknik Elektro Universitas Sanata Dharma Yogyakarta. 4. Dr. Linggo Sumarno selaku dosen pembimbing yang dengan penuh kesabaran, pengertian dan ketulusan hati memberikan bimbingan, kritik, saran, serta motivasi dalam penulisan skripsi ini. 5. Ibu Wiwien Widyastuti, S.T., M.T. dan Bapak Augustinus Bayu Primawan S.T., M.Eng. sebagai dosen penguji yang telah memberikan masukan, bimbingan, saran dalam merevisi skripsi ini. 6. Kedua orang tua dan keluarga besar yang telah mendukung serta mendoakan penulis. Terimakasih untuk segala kasih dan dukungannya. 7. Teman-teman Teknik Elektro khususnya angkatan 2014. 8. Seluruh Dosen dan Laboran Program studi Teknik Elektro, Fakultas Sains dan Teknologi Universitas Sanata Dharma yang telah membantu dan memberikan ilmu kepada penulis. 9. Seluruh Staff Fakultas Sains dan Teknologi Universitas Sanata Dharma atas bantuan dalam melayani mahasiswa. 10. Semua pihak yang tidak dapat disebutkan satu persatu atas semua dukungan yang telah diberikan dalam penyelesaian skripsi ini. Penulis menyadari bahwa tugas akhir ini belum sempurna, baik dari segi materi meupun penyajiannya. Untuk itu saran dan kritik yang membangun sangat diharapkan dalam penyempurnaan tugas akhir ini.. x.
(11) PLAGIAT MERUPAKAN TINDAKAN TIDAK TERPUJI. xi.
(12) PLAGIAT MERUPAKAN TINDAKAN TIDAK TERPUJI. DAFTAR ISI HALAMAN JUDUL (Bahasa Indonesia) ............................................................................. i HALAMAN JUDUL (Bahasa Inggris) ................................................................................. ii HALAMAN PERSETUJUAN ............................................................................................ iii HALAMAN PENGESAHAN ............................................................................................. iv HALAMAN PERNYATAAN KEASLIAN KARYA ......................................................... v HALAMAN PERSEMBAHAN DAN MOTTO HIDUP .................................................... vi LEMBAR PERNYATAAN PERSETUJUAN PUBLIKASI KARYA ILMIAH UNTUK KEPENTINGAN AKADEMIS .......................................................................................... vii INTISARI .......................................................................................................................... viii ABSTRACT ........................................................................................................................ ix KATA PENGANTAR .......................................................................................................... x DAFTAR ISI ...................................................................................................................... xii DAFTAR GAMBAR ......................................................................................................... xv DAFTAR TABEL ........................................................................................................... xvii BAB I : PENDAHULUAN ................................................................................................. 1 1.1. Latar Belakang Masalah ....................................................................................... 1 1.2. Tujuan dan Manfaat Penelitian ............................................................................ 2 1.3. Pembatasan Masalah ............................................................................................ 2 1.4. Metodologi Penelitian .......................................................................................... 3 BAB II : DASAR TEORI ................................................................................................... 5 2.1. Alat Stasioneri ...................................................................................................... 5 2.2. Webcam Logitech C270 ....................................................................................... 6 2.3. Pengolahan Citra Digital ...................................................................................... 6. xii.
(13) PLAGIAT MERUPAKAN TINDAKAN TIDAK TERPUJI. 2.3.1 Pengertian Citra Digital ............................................................................. 6 2.3.2 Citra RGB .................................................................................................. 8 2.3.3 Citra Grayscale .......................................................................................... 9 2.3.4 Citra Biner ................................................................................................. 9 2.3.5 Mengkonversi Citra RGB ke Citra Biner ................................................ 10 2.4. Ekstraksi Ciri ...................................................................................................... 11 2.4.1 Kontur Moore .......................................................................................... 12 2.4.2 Tanda Tangan Kontur ............................................................................... 15 2.5. Template Matching ............................................................................................ 20 2.6. Fungsi Jarak ....................................................................................................... 21 2.7. Basis Data .......................................................................................................... 22 BAB III : PERANCANGAN ............................................................................................ 23 3.1 Tata Letak Dan Fungsi Hardware ...................................................................... 23 3.2 Perancangan software ........................................................................................ 24 3.2.1 Pengambilan Citra Pengenalan Alat Stasioneri ....................................... 25 3.2.2 Tahap Preprocessing ............................................................................... 26 3.2.3 Tahap Ekstraksi Ciri ................................................................................ 27 3.2.4 Proses Fungsi Jarak ................................................................................. 30 3.2.5 Penentuan Keluaran ................................................................................. 30 3.3 Basis Data .......................................................................................................... 31 3.4 Tampilan GUI Matlab ........................................................................................ 33 3.5 Pengujian Citra Alat Stasioneri Pengujian Data Tidak Langsung ..................... 36 3.5.1. Pengujian Data Tidak Langsung ............................................................. 36 3.5.2. Pengujian Data Secara Langsung ............................................................ 36 BAB IV : HASIL DAN PEMBAHASAN ........................................................................ 37 4.1. Implementasi Program ....................................................................................... 37 4.1.1. Tombol Camera ON ................................................................................ 37 4.1.2. Tombol Capture ...................................................................................... 38 4.1.3. Popupmenu .............................................................................................. 39 4.1.4. Tombol Process ....................................................................................... 40 4.1.4.1. Program Pembanding Basis Data ................................................ 40 4.1.4.2. Program Konversi RGB ke Biner ................................................ 41. xiii.
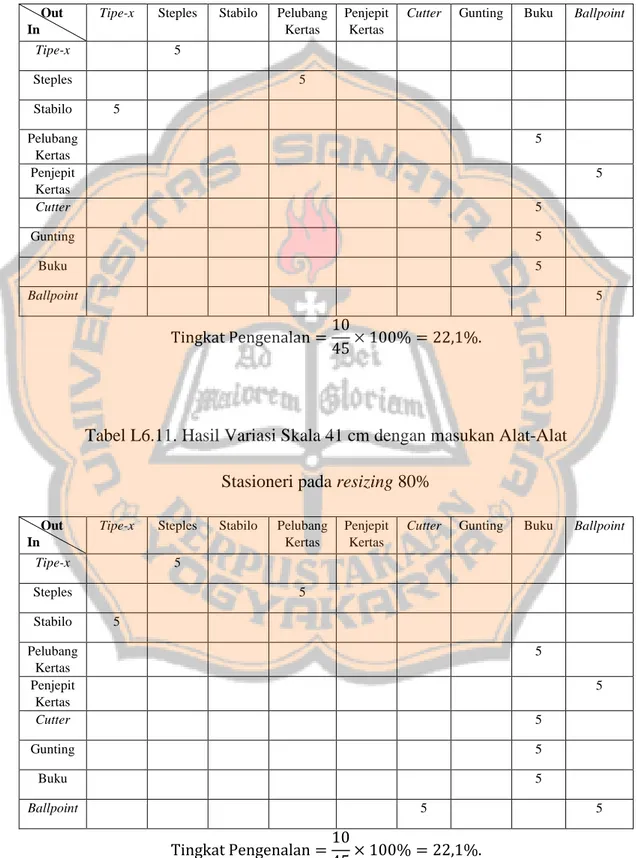
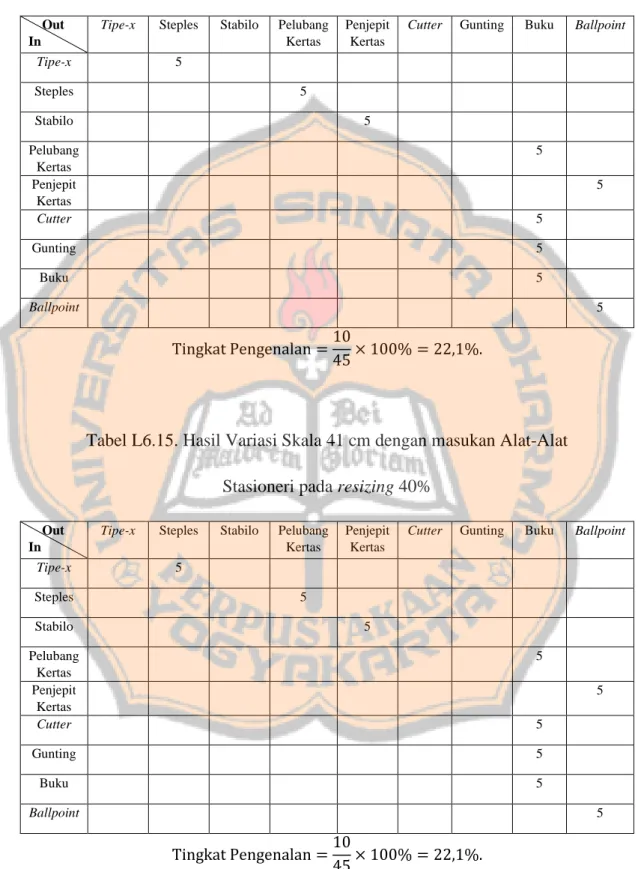
(14) PLAGIAT MERUPAKAN TINDAKAN TIDAK TERPUJI. 4.1.4.3. Program Operasi Dilasi ............................................................... 42 4.1.4.4. Program Resizing ........................................................................ 43 4.1.4.5. Ekstraksi Ciri............................................................................... 45 4.1.4.6. Program Pembanding Jarak Euclidean ....................................... 45 4.1.4.7. Program Penentuan Keluaran...................................................... 46 4.1.5. Tombol Reset ........................................................................................... 47 4.1.6. Tombol End ............................................................................................. 47 4.2. Pengujian Program Pengenalan Alat Stasioneri Secara Tidak Langsung .......... 47 4.3. Pengujian Program Pengenalan Alat Stasioneri Secara Langsung .................... 50 4.4. Analisis Hasil Data Pengujian Secara Tidak Langsung ..................................... 51 4.5. Analisis Hasil Data Pengujian Secara Langsung ............................................... 52 BAB V : KESIMPULAN DAN SARAN ......................................................................... 64 5.1. Kesimpulan ........................................................................................................ 64 5.2. Saran ................................................................................................................... 64 DAFTAR PUSTAKA ....................................................................................................... 66 LAMPIRAN I : ALUR PROSES PENGENALAN ALAT STASIONERI SECARA LANGSUNG .................................................................................................................. L1.1 LAMPIRAN II : LISTING PROGRAM ..................................................................... L2.1 LAMPIRAN III : DATA YANG DIPEROLEH DARI HASIL PERCOBAAN PROGRAM SECARA TIDAK LANGSUNG ............................................................. L3.1 LAMPIRAN IV : DATA YANG DIPEROLEH DARI HASIL PERCOBAAN PROGRAM SECARA LANGSUNG ........................................................................... L4.1 LAMPIRAN V : DATA YANG DIPEROLEH DARI HASIL PERHITUNGAN JARAK EUCLIDEAN SECARA LANGSUNG .......................................................... L5.1 LAMPIRAN VI : DATA YANG DIPEROLEH DARI HASIL VARIASI ROTASI DAN SKALA SERTA TRANSLASI (RST) ................................................................ L6.1. xiv.
(15) PLAGIAT MERUPAKAN TINDAKAN TIDAK TERPUJI. DAFTAR GAMBAR Gambar 2.1 Alat stasioneri yang digunakan ......................................................................... 5 Gambar 2.2. webcam ............................................................................................................ 6 Gambar 2.3. Koordinat Citra Digital .................................................................................... 7 Gambar 2.4. ilustralisasi digitalisasi citra (pixels pada koordinat x = 10, y = 3, memiliki nilai 110) ....................................................................................................................................... 7 Gambar 2.5. Skema ruang warna RGB dalam bentuk kubus ............................................... 8 Gambar 2.6 kubus warna dengan 24 bit .............................................................................. 8 Gambar 2.7 Citra grayscale .................................................................................................. 9 Gambar 2.8 citra biner ........................................................................................................ 10 Gambar 2.9. (a) Objek citra (b) Langkah – langkah Deteksi Kontur Moore (c) Hasil Kontur (d) Penomoran Pencarian .................................................................................................... 13 Gambar 2.10 Tanda-tangan kontur diperoleh dengan mula-mula menghitung jarak antara pusat massa dan beberapa titik pada kontur ....................................................................... 15 Gambar 2.11 Contoh tanda-tangan empat citra ikan .......................................................... 16 Gambar 3.1. Tata letak pengenalan alat stasioneri ............................................................. 23 Gambar 3.2. Blok diagram proses pengenalan alat stasioneri ............................................ 24 Gambar 3.3. Diagram alir proses pengenalan alat stasioneri ............................................. 25 Gambar 3.4. Diagram alir pengambilan citra ..................................................................... 26 Gambar 3.5. Diagram alir tahap preprocessing .................................................................. 26 Gambar 3.6. Diagram alir ekstraksi ciri ............................................................................. 27 Gambar 3.7. Diagram Alir Deteksi Kontur ........................................................................ 28 Gambar 3.8. Diagram alir ekstraksi tanda tangan kontur ................................................... 29 Gambar 3.9. Dniagram alir fungsi jarak Euclidean ............................................................ 30 Gambar 3.10. Diagram alir penentuan keluaran ................................................................. 31 Gambar 3.11. Blok diagram basis data ............................................................................... 31 Gambar 3.12. Diagram alir basis data ................................................................................ 32 Gambar 3.13. Tampilan GUI .............................................................................................. 33 Gambar 3.14. Diagram alir sistem pengenalan alat stasioneri (GUI) ................................. 34 Gambar 4.1. Program Kamera Aktif .................................................................................. 37 Gambar 4.2. program capture (ambil gambar) ................................................................... 38 Gambar 4.3. Program Popupmenu ..................................................................................... 39. xv.
(16) PLAGIAT MERUPAKAN TINDAKAN TIDAK TERPUJI. Gambar 4.4. Program Basis Data ....................................................................................... 40 Gambar 4.5 Program Konversi Citra RGB ke Biner .......................................................... 41 Gambar 4.6. Konversi Citra RGB ke Biner. (a) Citra Masukan (b) citra grayscale (c) citra hasil konversi gray ke biner ............................................................................................... 41 Gambar 4.7. Ukuran Elemen Penstruktur. (a) Closing = 15, (b) Closing = 10, (c) Closing = 5 .......................................................................................................................................... 42 Gambar 4.8. Program Operasi Closing ............................................................................... 43 Gambar 4.9. Program Resizing ........................................................................................... 44 Gambar 4.10 Variasi Resizing ............................................................................................ 44 Gambar 4.11. Program Ektraksi Ciri .................................................................................. 45 Gambar 4.12. Program Pembanding Jarak Euclidean ........................................................ 45 Gambar 4.13. Program Penentuan Keluaran ...................................................................... 46 Gambar 4.14. Program Tombol Reset ................................................................................ 47 Gambar 4.15. Program Tombol End .................................................................................. 47 Gambar 4.16. Tampilan GUI Pengujian Tidak Langsung .................................................. 49 Gambar 4.17. Contoh ketika GUI Dijalankan untuk alat stasioneri Gunting dengan resizing 10% ..................................................................................................................................... 49 Gambar 4.18 Tampilan GUI Pengujian Secara Langsung ................................................. 50 Gambar 4.19 Contoh ketika GUI Dijalankan untuk alat stasioneri penjepit-kertas dengan resizing 20% ....................................................................................................................... 51 Gambar 4.20 Hasil pengujian staples tanpa tambahan pencahayaan ............................... 62. xvi.
(17) PLAGIAT MERUPAKAN TINDAKAN TIDAK TERPUJI. DAFTAR TABEL Tabel 2.1. Hasil Deteksi Kontur Moore ............................................................................. 14 Tabel 3.1. Keterangan GUI ................................................................................................ 35 Tabel 4.1. Hasil Pengujian Ekstraksi Ciri Tanda Tangan Kontur Secara Tidak Langsung 52 Tabel 4.2. Hasil Pengujian Ekstraksi Ciri Tanda Tangan Kontur Secara Langsung .......... 53 Tabel 4.3. Perbandingan Hasil pengujian Ekstraksi Ciri .................................................... 54 Tabel 4.4. Hasil Pengujian Rotasi 1800 ............................................................................... 55 Tabel 4.5. Hasil Pengujian Skala 41 cm ............................................................................. 55 Tabel 4.6. Hasil Pengujian Skala 54 cm ............................................................................. 56 Tabel 4.7. Hasil Pengujian Translasi 1 cm ke Kiri ............................................................. 56 Tabel 4.8. Hasil Pengujian Translasi 1 cm ke Kanan ......................................................... 57 Tabel 4.9. Hasil Pengujian Translasi 1 cm ke Atas ............................................................ 57 Tabel 4.10. Hasil Pengujian Translasi 1 cm ke Bawah ...................................................... 58 Tabel 4.11. Perbandingan Hasil Pengujian Rotasi 1800 ..................................................... 59 Tabel 4.12. Perbandingan Hasil Pengujian Skala ............................................................... 60 Tabel 4.12. (Lanjutan) Perbandingan Hasil Pengujian Skala ............................................. 60 Tabel 4.13. Perbandingan Hasil Pengujian Translasi ......................................................... 60. xvii.
(18) PLAGIAT MERUPAKAN TINDAKAN TIDAK TERPUJI. BAB I PENDAHULUAN 1.1 Latar Belakang Masalah Perkembangan teknologi yang begitu pesat dari jaman ke jaman dengan berbagai variasi keunikan bentuk yang beragam, perkembangan teknologi salah satunya ialah pengolahan citra, yang banyak digunakan dalam proses pengenalan dan klasifikasi suatu objek yang ingin dikenali. Pada dasarnya, keterbatasan kemampuan manusialah yang menjadi alasan mengapa pengenalan dan klasifikasi suatu objek dengan teknologi sangat berguna. Alasan tersebutlah yang menjadi pengolahan citra dalam proses pengenalan objek menjadi sangat penting, sehingga sekarang ini telah berkembang berbagai macam cara dan metode dalam proses pengolahan citra terhadap objek yang ingin dikenali. Berhubungan dengan berkembangnya proses pengolahan citran tersebut, banyak penelitian yang menerapkan berbagai macam metode untuk berbagai macam objek yang ingin dikenali. Salah satu penelitian terkait yaitu suatu program pengenalan objek alat-alat stasioneri dengan metode ekstraksi ciri DST (Discrete Sine Transform) dan menggunakan metode template matching yaitu fungsi jarak euclidean [1]. Pada penelitian tersebut nilai koefisien DST (Discrete Sine Transform) yang digunakan sebanyak 171 koefisien untuk menghasilkan tingkat pengenalan 100% [1]. Berdasarkan hasil penelitian tersebut, hasil pengenalan yang semakin meningkat menyebabkan koefisiennya semakin banyak untuk membedakan citra objek alat-alat stasioneri yang satu terhadap yang lainnya. Maka dari itu, di sarankan agar menggunakan atau menerapkan ekstraksi ciri yang lain yang mampu memberikan penurunan koefisien yang lebih kecil dari 171 koefisien dan berhasil mengenali ciri dari objek yang dikenali. Pada penelitian ini, peneliti membuat sistem pengenalan alat stasioneri dengan menggunakan software matlab. Penelitian ini dilakukan untuk menghasilkan jumlah koefisien yang lebih kecil dari 171. Ekstraksi Ciri Tanda Tangan Kontur digunakan untuk mencapai tujuan tersebut. Berdasarkan penelitian lainnya menggunakan ekstraksi ciri tanda tangan kontur, untuk mengenali objek mesin logam, dengan jumlah koefisien yang digunakan sebanyak 40 koefisien dan dapat mengenali ciri dari objek yang dikenali [2].. 1.
(19) PLAGIAT MERUPAKAN TINDAKAN TIDAK TERPUJI 2. 1.2. Tujuan Dan Manfaat Penelitian Tujuan dari penulisan penelitian tugas akhir ini ialah membuat suatu sistem untuk. mengetahui atau mengenali jenis-jenis dari alat stasioneri menggunakan ekstraksi ciri tanda tangan kontur dengan jumlah koefisien yang lebih kecil dari 171 koefisien. Manfaat dari penulisan penelitian tugas akhir ini ialah untuk membantu pengguna aplikasi robot dengan sensor visual dalam mendeteksi jenis-jenis alat stasioneri.. 1.3. Pembatasan Masalah Bahan pokok dari perancangan tugas akhir ini terdiri dari dua komponen utama yaitu. hardware dan software pada komputer. Hardware berfungsi untuk memasukkan gambar, sedangkan software pada komputer berfungsi untuk mengatur semua proses pengenalan gambar yang diperoleh dari hasil capture melalui webcam. Pada perancangan sistem ini, penulis memfokuskan pembuatan software pada komputer untuk memproses pengenalan gambar, sedangkan untuk hardwarenya berupa webcam. Beberapa batasan masalah yang dianggap perlu pada perancangan tugas akhir ini, yaitu sebagai berikut: 1. Menggunakan ekstraksi ciri tanda tangan kontur. 2. Pengenalan 9 objek alat – alat stasioneri berupa: ballpoint, tipe_x, paper, buku kecil (note book), papper klip, pelubang kertas, gunting, cutter, stabilo, dan staples. 3. Menggunakan metode Template Matching dangan fungsi jarak Euclidean. 4. Menggunakan 9 variasi resizing yaitu 90%, 80%, 70%, 60%, 50%, 40%, 30%, 20% dan 10%. 5. Posisi webcam dan obyek ditempatkan pada dudukan yang sudah disediakan sebelumnya. 6. Jarak capture antara webcam dangan obyek berkisar ±50 cm. 7. Posisi webcam terhadap obyek vertical. 8. Pencahayaan pengambilan gambar berdasarkan lampu Laboratorium TA. 9. Software yang digunakan ialah matlab R2010a 10. Keluaran berupa teks pada layar monitor..
(20) PLAGIAT MERUPAKAN TINDAKAN TIDAK TERPUJI 3. 1.4 Metodologi Penelitian Dalam penyusunan Tugas Akhir, Peneliti mempelajari banyak dari buku–buku yang relevan maupun jurnal untuk memeperkuat materi judul penelitian yang diperoleh dari dosen pembibing saya sendiri dan berbagai literatur–literatur dari Internet mengenai pengertian stasioneri, pengertian webcam, pengolahan citra, fungsi jarak euclidean, transformasi sinus diskrit, dan tentang Matlab. Langkah-langkah dalam pengerjaan tugas akhir:. a.. Pengumpulan bahan–bahan referensi berupa buku–buku dan jurnal–jurnal yang di ambil melalui Internet.. b.. Pembuatan software Sistem akan bekerja apabila user menekan tombol “Camera On” yang sudah disediakan dalam tampilan visual software. Sistem akan mengolah data yang diterima dan data tersebut akan mulai menampilkan proses video (record) yang ditampikan pada axes 1. Lalu user memulai proses pengambilan gambar dengan menekan tombol “capture”. Setelah itu, user menekan tombol “process” untuk memulai pemrosesan pengenalan gambar yang telah di capture. Komputer akan mengolah gambar dengan program matlab dan menyajikannya sebagai sebuah informasi berupa keluaran teks pada layar monitor.. c.. Pembuatan Basis Data Pembuatan basis data diawali dengan pengambilan data berupa citra alat stasioneri dengan ukuran gambar 680x480 [1]. Selanjutnya, data tersebut diproses pada tahap preprocessing. Tahap preprocessing mengkonversi citra RGB ke gray skale lalu ke biner, untuk menghilangkan noise dan menghaluskan citra objek menggunakan imfill dan imclose, setelah itu melakukan resizing (mengurangi jumlah piksel yang besar ke jumlah piksel yang lebih kecil). Hasil preprocessing akan menjadi masukkan pada tahap selanjutnya yaitu tahap ekstraksi cirri yang diawali dengan deteksi kontur citra menggunakan kontur Moore. Setelah itu, mencari koefisien tanda tangan kontur citra dengan menggunakan tanda tangan kontur. Hasil ekstraksi ciri disimpan dalam folder dan digunakan sebagai acuan dalam pengenalan alat stasioneri. Jarak antara webcam dengan objek alat stasioneri adalah ±50cm..
(21) PLAGIAT MERUPAKAN TINDAKAN TIDAK TERPUJI 4. d.. Pengambilan data Penilitian ini menggunakan 9 variasi resizing dan 9 alat stasioneri. Sembilan variasi resizing yang digunakan yaitu 90%, 80%, 70%, 60%, 50%, 40%, 30%, 20% dan 10%. Jumlah data yang diambil terdiri dari 9 alat stasioneri x 9 variasi resizing + 9 data tanpa resizing = 90 data. Data yang didapatkan ialah sebanyak data pada penelitian ini.. e.. Analisis dan Kesimpulan Analisis data yang dilakukan dengan meneliti pengaruh 9 variasi resizing yang digunakan (90%, 80%, 70%, 60%, 50%, 40%, 30%, 20% dan 10%) terhadap tingkat pengenalan alat stasioneri dan mengamati pengaruh tanda tangan kontur dalam mengenali alat stasioneri dengan melihat jumlah koefisien yang digunakan. Serta membandingkan penelitian sebelumnya dengan penelitian ini. Penyimpulan hasil dilakukan dengan mencari nilai variasi resizing untuk mendapatkan koefisien tanda tangan terkecil dengan tingkat pengenalan terbaik..
(22) PLAGIAT MERUPAKAN TINDAKAN TIDAK TERPUJI. BAB II DASAR TEORI 2.1 Alat Stasioneri Stasioneri merupakan kata benda yang memiliki arti peralatan tulis–menulis. Contoh alat stasioneri meliputi peralatan tulis (ballpoint, tipe_x, buku kecil (note book) dan lainnya), souvenir, dan peralatan kerja (papper klip, pelubang kertas, gunting, cutter, stabilo, staples dan lainnya) [1]. Gambar alat stasioneri yang digunakan dapat dilihat pada gambar 2.1.. Gambar 2.1 Alat stasioneri yang digunakan.. Dalam Tugas Akhir alat stasioneri yang dipakai meliputi: (a) tipe_x, (b) staples, (c) stabilo, (d) pelubang kertas, (e) papper klip, (f) cutter, (g) gunting, (h) buku kecil (note book), dan (i) ballpoint.. 5.
(23) PLAGIAT MERUPAKAN TINDAKAN TIDAK TERPUJI 6. 2.2 Webcam Logitech C170 Webcam singkatan dari Web Camera yang berasal dari bahasa Inggris, digunakan secara RealTime. Banyak merk webcam yang tersedia, misalnya Logitech, SunFlowwer, dan lainnya. Resolusi dari webcam biasanya sama berkisar antara 352×288 / 640×480 piksel atau bahkan lebih besar, ada yang kualitasnya hingga 5 Mega piksel. Webcam sebuah kamera video digital berukuran kecil dihubungkan ke komputer melalui port USB atau port COM. Gambar webcam yang digunakan dapat dilihat pada gambar 2.2.. Gambar 2.2. webcam [1]. 2.3 Pengolahan Citra Digital 2.3.1. Pengertian Citra Digital Secara umum pengolahan citra digital menunjukan pada pemrosesan gambar 2. dimensi. Dalam konteks yang lebih luas, pengolahan citra digital mengacu pada pemrosesan setiap data 2 dimensi. Citra digital merupakan sebuah larik (array) yang berisi nilai – nilai real maupun kompleks yang direpresentasikan dengan deretan bit tertentu. Suatu citra dapat di definisikan sebagai fungsi f(x,y) berukuran M baris dan N kolim, dangan x dan y adalah koordinat spasial, dan amplitude f di titik dikoordinat (x,y) dinamakan intensitas atau tingkat keabuan dari citra pada titk tersebut. Apabila nilai x, y, dan nilai amplitude f secara keseluruhan berhingga (finite) dan bernilai diskrit maka dapat dikatakan bahwa citra tersebut adalah citra digital. Gambar 2.3 menunjukan posisi koordinat citra digitan..
(24) PLAGIAT MERUPAKAN TINDAKAN TIDAK TERPUJI 7. Gambar 2.3. Koordinat Citra Digital [3] citra digital dapat ditulis dalam bentuk matriks sebagai berikut:. f(0,0) f(0,1) ⋯ f(0, N - 1) f(1,0) f(1,1) ⋯ f(1, N - 1) f(x,y) = [ ] : ⋮ ⋮ f(M - 1,0) f(M - 1,1) ⋯ f(M - 1, N - 1) 2.1 nilai pada suatu irisan antar baris dan kolom (pada posisi x,y) disebut dengan picture elements, image elements, pels, atau pixels. Istilah terakhir (pixels) paling sering digunakan pada citra digital. Gambar 2.2 merupakan ilustralisasi digitalisasi citra dengan M = 16 baris dan N = 16 kolom.. Gambar 2.4. ilustralisasi digitalisasi citra (pixels pada koordinat x = 10, y = 3, memiliki nilai 110) [3].
(25) PLAGIAT MERUPAKAN TINDAKAN TIDAK TERPUJI 8. 2.3.2. Citra RGB Ruang warna ini menggunakan tiga komponen dasar yaitu merah (R), hijau (G) dan. biru (B). setiap piksel dibentuk oleh ketiga komponen tersebut. Model RGB biasa disajikan dalam bentuk kubur tiga dimensi, dengan warna merah, hijau dan biru berada pada pojok sumbu (gambar 2.5). warna hitam berada pada titik asal dan warna putih berada di ujung kubus yang berseberangan. Gambar 2.5 memperlihatkan kubus warna secara nyata dengan resolusi 24 bit. Perlu diketahui, dengan menggunakan 24 bit, jumlah warna mencapai 16.777.216.. Gambar 2.5. Skema ruang warna RGB dalam bentuk kubus [3]. Gambar 2.6 kubus warna dengan 24 bit [3].
(26) PLAGIAT MERUPAKAN TINDAKAN TIDAK TERPUJI 9. RGB biasa digunakan karena kemudahan dalam perancangan hardware, tetapi sebenarnya tidak ideal untuk beberapa aplikasi. Mengingat warna merah, hijau dan biru sesungguhnya terkorelasi erat, sangat sulit untuk beberapa algoritma pemrosesan citra. Sebagai contoh, kebutuhan untuk memperoleh warna. alamiah seperti merah dengan. menggunakan RGB menjadi sangat kompleks mengingat komponen R dapat berpasangan G dan B, dengan nilai berapa saja hal ini menjadi mudah jika menggunakan ruang warna HLS ataupun HSV.. 2.3.3. Citra Grayscale Citra grayscale merupakan merupakan citra digital yang hanya memiliki 1 nilai kanan. pada setiap pixelnya, dengan kata lain nilai bagian RED = GREEN = BLUE. Nilai tersebut digunakan untuk menunjukkan tingkat intensitas. Warna yang dimiliki adalah warna dari hitam, keabuan dan putih. Tingkat keabuan disini merupakan warna abu dengan berbagai tingkatan dari hitam hinggs mendekati putih. Citra grayscale berikut memiliki kedalaman warna 8 bit (256 kombinasi warna keabuan).. Gambar 2.7 Citra grayscale [3]. 2.3.4. Citra Biner Citra biner adalah citra yang memiliki 2 kemungkinan nilai pixel yaitu hitam dan putih.. Citra biner juga sering disebut B&W (black and white) atau citra monokrom. Hanya dibutuhkan 1 bit untuk mewakili nilai setiap pixel dan citra biner..
(27) PLAGIAT MERUPAKAN TINDAKAN TIDAK TERPUJI 10. Citra biner sering kali muncul sebagai hasil dari proses pengolahan seperti segmentasi, pengambangan, morfologi ataupun dithering.. Gambar 2.8 citra biner [3]. 2.3.5. Mengkonversi Citra RGB ke Citra Biner Suatu citra RGB (Red, Green, Blue) terdiri dari tiga bidang citra yang saling lepas,. masing – masing terdiri dari warna utama, yaitu : merah, hijau dan biru di setiap pixel. Citra RGB dikonversi ke dalam citra berskala keabuan mengingat banyak pemrosesan citra yang bekerja pada skala keabuan. Mengkonversi citra RGB ke biner dilakukan dengan menerapkan suatu nilai yang dikena sebagai nilai ambang (Threshold)[7]. Untuk melakukan perubahan suatu gambar full color (RGB) menjadi suatu citra grayscale (gambar keabuan) [7], metode yang umum digunakan, yaitu: I = 0,2989xR + 0,5870xG + 0,1141xB. (2.2). dimana : I : Tingkat Keabuan R : Unsur warna merah G : Unsur warna hijau B : Unsur warna biru Proses selanjutnya untuk mengkonversi citra berskala keabuan ke citra biner dapat mengatur nilai ambang (threshold). Adapun metode otsu yang digunakan untuk mengkonversi citra berskala keabuan ke citra biner. Pada metode otsu ini secara otomatis nilai ambang dari tingkat keabu-abuan histrogram melalui analisis diskriminan. Metode otsu terdiri dari beberapa tahapan. Tahapan pertama, probabilitas nilai intensitas i dihitung melalui persamaan sebagai berikut: pi = ni /N. (2.3).
(28) PLAGIAT MERUPAKAN TINDAKAN TIDAK TERPUJI 11. Keteranan : ni = jumlah piksel dengan intensitas i. N = jumlah semua piksel dalam citra Untuk menghitung nilai zeroth - cumulative moment, first- order cumulative moment dan nilai rerata dari gambar original dapat dilihat secara berturut pada persamaan dibawah : ω(k) = ∑𝑘𝑖=1 𝑝𝑖. (2.4). 𝜇(𝑘) = ∑𝑘𝑖=1 𝑖 𝑝𝑖. (2.5). 𝜇 𝑇 = 𝜇(𝐿) = ∑𝐿𝑖=1 𝑖. 𝑝𝑖. (2.6). Untuk mendapatkan nilai threshold atau nilai ambang k dapat dihitung menggunakan persamaan sebagai berikut: 2. 2. 𝜎 𝐵 (𝑘) = max 𝜎 𝐵 (𝑘). (2.7). dengan 2. 𝜎 𝐵 (𝑘) =. 2.4. [𝜇𝑇 𝜔(𝑘)−𝜇(𝑘)]2 𝜔(𝑘)[1−𝜔(𝑘)]. (2.8). Ekstraksi Ciri Proses mengambil ciri-ciri yang terdapat pada objek di dalam citra. Pada proses ini. objek di dalam citra mungkin perlu dideteksi seluruh tepinya, lalu menghitung ropertiproperti objek yang berkaitan sebagai ciri. Beberapa proses ekstraksi cirri mungkin perlu mengubah citra masukan sebagai citra biner, melakukan penipisan pola, dan sebagainya [5]..
(29) PLAGIAT MERUPAKAN TINDAKAN TIDAK TERPUJI 12. 2.4.1. Kontur Moore Kontur adalah perubahan intensitas dari satu titik ke titik tetangganya pada suatu citra.. Dengan perubahan intensitas mata seseorang sanggup mendeteksi pinggiran atau kontur suatu benda. Deteksi kontur bertujuan untuk mendapatkan tepi suatu objek. Salah satu cara untuk mendapatkan mendeteksi tepi objek yaitu dengan algoritma pelacakan kontur Moore.. Algoritma 2.1 : Memperoleh Kontur Moore [4]. Masukan : •. f (x,y): Citra masukan berukuran x baris dan y kolom. Keluaran : •. kontur : Larik yang berisi piksel-piksel kontur. 1. Dapatkan piksel bernilai 1 pada bagian terkiri dan teratas. Posisi piksel dicatat pada 𝑎0 dan posisi untuk piksel berikutnya dicatat pada 𝑏0 , yang pada awalnya diisi 4 (arah barat di Gambar 2.9 (c)). 2. Periksa 8 tetangga 𝑎0 searah jarum jam dimulai dari 𝑎0 . Piksel pertama yang bernilai 1 dicatat pada 𝑎1 . Adapun posisi untuk piksel yang mendahului 𝑎1 dicatat pada 𝑏1 . 3. Kontur(1) 𝑎0 , kontur(2) 𝑎1 , jum 2 4. a𝑎1 dan b𝑏1 5. WHILE true a. Cari piksel pada 8 tetangga yang pertama kali bernilai 1 dengan pencarian dimulai dari arah b dengan menggunakan pola arah jarum jam. b. Catat posisi piksel tersebut ke a. c. Catat posisi yang mendahului piksel tersebut ke b. d. Tambahkan a sebagai bagian kontur: Jum jum + 1 Kontur(jum) a e. If a = 𝑎0 Keluar dari while.
(30) PLAGIAT MERUPAKAN TINDAKAN TIDAK TERPUJI 13. end-if end-while Berikut algoritma kontur Moore dapat dilihat pada Gambar 2.9 dibawah ini.. Gambar 2.9. (a) Objek citra (b) Langkah – langkah Deteksi Kontur Moore (c) Hasil Kontur (d) Penomoran Pencarian [4].. Untuk memahami algoritma moore, perhatikan gambar 2.9. Gambar 2.9(a) menyatakan keadaan objek pada citra. Piksel bernilai 1 menyatakan bagian objek dan yang bernilai 0 adalah bagian latar belakang. Pada contoh tersebut, pelacakan akan dimulai pada posisi (2,2), yaitu piksel bagian objek yang terletak paling kiri dan paling atas. Titik pencarian untuk piksel kedua dimulai dari arah kiri piksel (2,2) tersebut. Pencarian dilakukan searah dengan jarum jam. Pada langkah pertama, diperoleh piksel pada posisi (2,3). Pencarian berikutnya akan dimulai di posisi (1,3), yaitu yang ditandai dengan bulatan. Pada pencarian kedua, piksel yang didapat, yaitu posisi (2,4), dengan titik pencarian berikutnya dimulai di posisi (1,4). Pada pencarian ketiga, piksel yang didapat adalah (2,5), dengan titik pencarian berikutnya dimulai di posisi (1,5). Pada pencarian keempat, piksel yang didapat, yaitu (3,5), dengan titik pencarian berikutnya dimulai di posisi (3,6). Jika langkah tersebut terus diulang maka akan didapat piksel yang sama dengan piksel yang pertama. Saat itulah proses untuk melacak kontur diakhiri. Hasil kontur diperlihatkan pada Gambar 2.9(c)..
(31) PLAGIAT MERUPAKAN TINDAKAN TIDAK TERPUJI 14. Berdasarkan algoritma 1 dengan menggunakan Gambar 2.9(a) hasil deteksi kontur berupa posisi piksel objek (x,y) dapat dilihat pada Tabel 2.1.. Tabel 2.1. Hasil Deteksi Kontur Moore x. y. 2. 2. 2. 3. 2. 4. 2. 5. 3. 5. 4. 4. 5. 5. 5. 4. 5. 3. 4. 2. 3. 3. 2. 2.
(32) PLAGIAT MERUPAKAN TINDAKAN TIDAK TERPUJI 15. 2.4.2. Tanda Tangan Kontur Tanda-tangan kontur didefinisikan sebagai: 𝑑(𝑛) = √(x(n) − x̅ )2 + (y(n) − y̅ )2. (2.9). Dalam hal ini, (𝑦̅, 𝑥̅) menyatakan pusat massa kontur, yang diperoleh melalui rumus y̅ =. 1 N. ∑N ̅= i y(i), x. 1 N. ∑N i x(i),. (2.10). dengan n = 1,2,3,….,N. Ilustrasi tanda-tangan kontur ditunjukkan pada Gambar 2.7. Gambar 2.10 Tanda-tangan kontur diperoleh dengan mula-mula menghitung jarak antara pusat massa dan beberapa titik pada kontur [4]. Contoh tanda-tangan empat objek ditunjukkan pada Gambar 2.11. Gambar 2.11(b) dan 2.11(d) menunjukkan bahwa translasi menghasilkan bentuk grafik tanda-tangan yang sama. Gambar 2.11(f) menunjukkan bahwa hasil rotasi membuat bentuk tanda tangan tergeser, sedangkan Gambar 2.11(h) menyatakan sedikit perbedaan pada objek membuat tanda tangan ikut berubah. Hal ini menunjukkan bahwa tanda tangan kontur peka terhadap derau pada tepi objek..
(33) PLAGIAT MERUPAKAN TINDAKAN TIDAK TERPUJI 16. Gambar 2.11 Contoh tanda-tangan empat citra ikan [4] Dalam praktik, titik-titik yang digunakan untuk memperoleh d(1) dilakukan dengan memindai kontur dari arah kiri dan atas. Titik pada kontur yang ditemukan pertama kali akan dipakai untuk menghitung d(1). Langkah selengkapnya diperlihatkan pada algoritma berikut.. ALGORITMA 2.2 – Memperoleh tanda-tangan objek [4] Masukan: •. f(M,N) : citra biner berukuran M x N. Keluaran: •. jarak sebanyak piksel batas. tandatangan(BW): 1. batas ← inbound_tracing(f) 2. jum ← jumlah piksel batas 3. [xp, yp] ← pusat massa objek dalam f 4. FOR p ← 1 TO jum.
(34) PLAGIAT MERUPAKAN TINDAKAN TIDAK TERPUJI 17. Jarak(p) ← jarak antara piksel batas (batas(p)) dan titik pusat massa END-FOR 5. RETURN jarak [4]. Contoh 1. Berikut adalah citra objek layang – layang dalam bentuk matriks dimana ada (y,x). Matriks tersebut ialah keluaran dari kontur moore sebagai proses deteksi pada citra objek tersebut. 0. 0. 0. 1. 0. 0. 0. 0. 0. 1. 0. 1. 0. 0. 0. 1. 0. 0. 0. 1. 0. 1. 0. 0. 0. 0. 0. 1. 0. 1. 0. 0. 0. 1. 0. 0. 0. 1. 0. 1. 0. 0. 0. 0. 0. 1. 0. 0. 0. Keluaran dari kontur moore selanjutnya menjadi masukan pada tanda tangan kontur yang berfungsi untuk mencari pusat kontur berdasarkan persamaan (2.10) dan menghitung jarak dari pusat kontur ke tepi – tepi kontur dengan persamaan (2.11). Pertama – tama mencari pusat kontur menggunakan persamaan (2.11) yaitu sebagai berikut : N N 1 1 y̅ = ∑ y(i), x̅ = ∑ x(i), N N i i. Keterangan : Y = kolom X = baris.
(35) PLAGIAT MERUPAKAN TINDAKAN TIDAK TERPUJI 18. Jadi,. y̅ =. 1+2+3+4+5+6+7+6+5+4+3+2 12. =. 48 12. =4. Pada contoh matriks layang - layang ini nilai x̅ = y̅ Setelah nilai x̅ dan y̅ telah diketahui, maka penyelesaian persamaan (2.10) sebagai berikut : 𝑑(𝑛) = √(x(n) − x̅ )2 + (y(n) − y̅ )2 Keterangan : n = 1, 2, 3, . . , N 𝑑(1) = √(x(1) − 4)2 + (y(4) − 4)2 = 3 𝑑(2) = √(x(2) − 4)2 + (y(5) − 4)2 = 2.23 𝑑(3) = √(x(3) − 4)2 + (y(6) − 4)2 = 2.23 𝑑(4) = √(x(4) − 4)2 + (y(7) − 4)2 = 3 𝑑(5) = √(x(5) − 4)2 + (y(6) − 4)2 = 2.23 𝑑(6) = √(x(6) − 4)2 + (y(5) − 4)2 = 2.23 𝑑(7) = √(x(7) − 4)2 + (y(4) − 4)2 = 3 𝑑(8) = √(x(6) − 4)2 + (y(3) − 4)2 = 2.23 𝑑(9) = √(x(5) − 4)2 + (y(2) − 4)2 = 2,23 𝑑(10) = √(x(4) − 4)2 + (y(1) − 4)2 = 3 𝑑(11) = √(x(3) − 4)2 + (y(2) − 4)2 = 2.23 𝑑(12) = √(x(2) − 4)2 + (y(3) − 4)2 = 2.23.
(36) PLAGIAT MERUPAKAN TINDAKAN TIDAK TERPUJI 19. Contoh 2. Berikut adalah citra segi tiga dalam bentuk matriks dimana ada sumbu (y,x). Matriks tersebut ialah keluaran dari kontur moore sebagai proses deteksi pada citra objek tersebut. 0. 0. 0. 1. 0. 0. 0. 0. 0. 1. 0. 1. 0. 0. 0. 1. 0. 0. 0. 1. 0. 1. 1. 1. 1. 1. 1. 1. 0. 0. 0. 0. 0. 0. 0. 0. 0. 0. 0. 0. 0. 0. 0. 0. 0. 0. 0. 0. 0. Keluaran dari kontur moore selanjutnya menjadi masukan pada tanda tangan kontur yang berfungsi untuk mencari pusat kontur berdasarkan persamaan (2.10) dan menghitung jarak dari pusat kontur ke tepi – tepi kontur dengan persamaan (2.11). y̅ =. N N 1 1 ∑ y(i), x̅ = ∑ x(i), N N i i. Keterangan : Y = kolom X = baris Jadi,. y̅ = x̅ =. 1+2+3+4+5+6+7+6+5+4+3+2 12 1+2+3+4+4+4+4+4+4+4 +3+2 12. = =. 48 12 39 12. =4 =3. Setelah nilai x̅ dan y̅ telah diketahui, maka penyelesaian persamaan (2.10) sebagai berikut : 𝑑(𝑛) = √(x(n) − x̅ )2 + (y(n) − y̅ )2 Keterangan : n = 1, 2, 3, . . , N.
(37) PLAGIAT MERUPAKAN TINDAKAN TIDAK TERPUJI 20. 𝑑(1) = √(x(1) − 3)2 + (y(4) − 4)2 = 2 𝑑(2) = √(x(2) − 3)2 + (y(5) − 4)2 = 1.4 𝑑(3) = √(x(3) − 3)2 + (y(6) − 4)2 = 2 𝑑(4) = √(x(4) − 3)2 + (y(7) − 4)2 = 3.17 𝑑(5) = √(x(4) − 3)2 + (y(6) − 4)2 = 2.23 𝑑(6) = √(x(4) − 3)2 + (y(5) − 4)2 = 1.41 𝑑(7) = √(x(4) − 3)2 + (y(4) − 4)2 = 1 𝑑(8) = √(x(4) − 3)2 + (y(3) − 4)2 = 1.41 𝑑(9) = √(x(4) − 3)2 + (y(2) − 4)2 = 2.23 𝑑(10) = √(x(4) − 3)2 + (y(1) − 4)2 = 3.16 𝑑(11) = √(x(3) − 3)2 + (y(2) − 4)2 = 2 𝑑(12) = √(x(2) − 3)2 + (y(3) − 4)2 = 1.41. 2.5 Template Matching Template matching adalah salah satu teknik dalam pengolahan citra digital yang berfungsi untuk mencocokan tiap-tiap bagian dari suatu citra dengan citra yang menjadi template (acuan). Metode template matching adalah salah satu metode terapan dari teknik konvolusi. Metode ini sering digunakan untuk mengidentifikasi citra karakter huruf, angka, sidik jari (fingerprint) dan aplikasi-aplikasi pencocokan citra lainnya. Secara umum teknik konvolusi didefinisikan sebagai suatu cara untuk mengkombinasikan dua buah deret angka yang menghasilkan deret angka ke tiga. Prinsip metode ini adalah membandingkan antara image objek yang akan dikenali dengan image template yang ada. Image objek yang akan dikenali mempunyai tingkat.
(38) PLAGIAT MERUPAKAN TINDAKAN TIDAK TERPUJI 21. kemiripan sendiri terhadap masing-masing image template. Pengenalan dilakukan dengan melihat nilai tingkat kemiripan tertinggi dan nilai batas ambang pengenalan dari image objek tersebut. Bila nilai tingkat kemiripan berada di bawah nilai batas ambang maka image objek tersebut dikategorikan sebagai objek tidak dikenal [6].. 2.6 Fungsi Jarak Jarak digunakan untuk membandingkan dua buah vektor. Perbandingan suatu nilai dikatakan sama atau tidak berdasarkan dari tingkat kemiripan yang tinggi dan nilai dua vektornya. Dengan menggunakan metode jarak euclidean dapat digunakan untuk mengukur tingkat kemiripan dua buah vektor tersebut. Jarak Euclidean adalah perhitungan jarak antara satu data terhadap sekelompok data (basis data). Pada jarak euclidean metrika yang paling sering digunakan untuk menghitung kesamaan 2 vektor Rumus dari euclidean: 𝑛. 𝑗(𝑉1 , 𝑉2 ) = √∑𝑘=1(𝑉1 (𝑘) − 𝑉2 (𝑘))2 Keterangan :. 𝑉1 (𝑘) = citra basis data. 𝑉2 (𝑘) = citra masukan.. Contoh : Jarak euclidean menghitung akar dari kuadrat perbedaan 2 vektor. Terdapat 2 vektor ciri berikut. V1= [ 0 1 2 3] V2= [ 4 5 6 7] Jarak euclidean dari vektor A dan B adalah: j(𝑉1 , 𝑉2 ) = √(0 − 4)2 + (1 − 5)2 + (2 − 6)2 + (3 − 7)2 = √16 + 16 + 16 + 16 =8. (2.12).
(39) PLAGIAT MERUPAKAN TINDAKAN TIDAK TERPUJI 22. 2.7. Basis Data Basis data adalah kumpulan informasi yang akan menjadi acuan dan disimpan dalam. computer secara sistematik sehingga dapat diperiksa menggunakan suatu program computer untuk mendapatkan informasi dari basis data tersebut. Semakin banyak informasi yang diperlukan maka akan semakin banyak basis data objek referensi yang akan disimpan dalam basis data. Dalam peneitian ini basis data objek referensi ini berdasarkan 9 alat stasioneri..
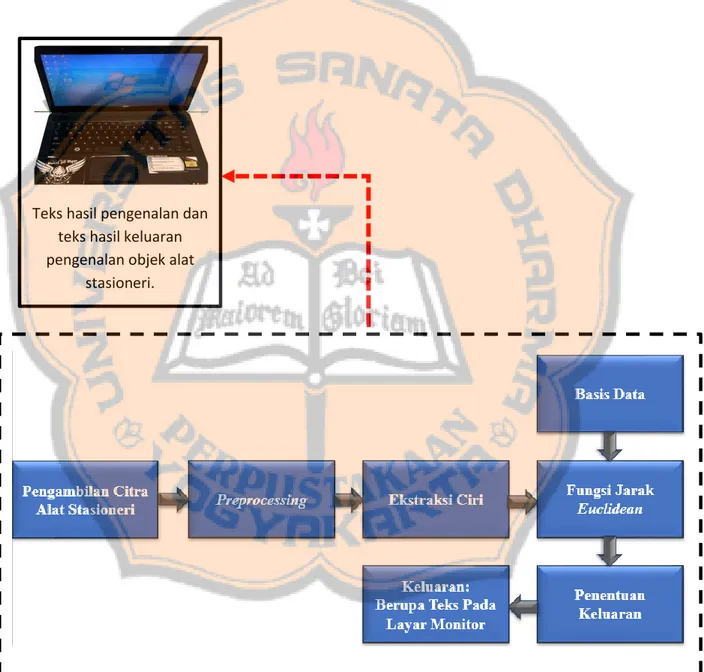
(40) PLAGIAT MERUPAKAN TINDAKAN TIDAK TERPUJI. BAB III PERANCANGAN 3.1. Tata Letak Dan Fungsi Hardware Tata letak hardware pengenalan alat stasioneri dapat dilihat pada Gambar 3.1.. Pangkuan kamera webcam C170. 1. Teks hasil pengenalan dan teks hasil keluaran pengenalan objek alat stasioneri.. ±50cm. 2 Tempat kedudukan objek alat stasioneri. Gambar 3.1. Tata letak pengenalan alat stasioneri t kedudukan objek alat stasioneri. Berdasarkan gambar 3.1. Tata letak pengenalan alat stasioneri diatas, proses pengambilan citra dicaptur menggunakan webcam C170, citra yang telah di capture akan dikirim ke laptop menggunakan USB 2.0 dan diproses untuk mendapatkan hasil pengenalannya yang akan ditampilkan pada layar laptop dalam bentuk teks. Dari blok diagram diatas dapat dilihat bahwa ada empat komponen utama yang digunakan dalam penelitian yang dipakai oleh peneliti, dimana ada pangkuan kamera yang ditunjukan pada nomor 1 dan tempat kedudukan objek pada nomor 2, yang disatukan dalam satu benda,3 webcam sebagai alat pengambilan atau pengcapture citra, alat stasioneri berupa gunting sebagai objek yang digunakan untuk dikenali, laptop sebagai media proses pengenalan yang dikerjakan oleh program menggunakan matlab. Ada bebrapa catatan. 23.
(41) PLAGIAT MERUPAKAN TINDAKAN TIDAK TERPUJI 24. khusus bahwa jarak antara webcam dengan objek ialah ±50 cm, dan warna background yang digunakan pada kedudukan objek ialah warna hitam.. 3.2. Perancangan software Proses perancangan software pengenalan alat stasioneri terdiri dari beberapa proses, yaitu pengambilan citra, preprocessing, ekstraksi ciri, fungsi jarak, dan penentuan keluaran. Proses perancangan sistem alat stasioneri dapat dilihat pada Gambar 3.2.. Teks hasil pengenalan dan teks hasil keluaran pengenalan objek alat stasioneri.. Gambar 3.2. Blok diagram proses pengenalan alat stasioneri.
(42) PLAGIAT MERUPAKAN TINDAKAN TIDAK TERPUJI 25. A. Mulai. Masukan : Citra Alat Stasioneri. Fungsi Jarak Euclidean. Basis Data. Prepocessing. Penentuan Keluaran. Ekstraksi Ciri. Keluaran : Berupa Teks Pada Layar Monitor. A. Gambar 3.3. Diagram alir proses pengenalan alat stasioneri. Selesa i. Berdasarkan gambar 3.3 Diagram alir proses pengenalan alat stasioneri diatas, proses pengambilan gambar dilakukan dengan menggunakan webcam. Pada tahap preprocessing, citra RGB dikonversi ke Grayscale, lalu setelah itu dikonversi lagi ke dalam bentuk Biner. Kemudian untuk memperkecikan jumlah piksel citra objek dilakukan resizing. Selanjutnya hasil dari preprocessing ini akan diproses ke tahap pengenalan. Tahap pengenalan terdiri dari 3 tahap yaitu ekstraksi ciri, perhitungan fungsi jarak, dan basis data citra pengenalan alat stasioneri. Terakhir dari proses sistem ini yaitu tahap penentuan keluaran. Hasil penentuan keluaran sistem ini berdasarkan jarak minimum yang diperoleh dari hasil perbandingan antara ekstraksi ciri dengan basis data.. 3.2.1. Pengambilan Citra Pengenalan Alat Stasioneri Proses pengambilan citra alat stasioneri adalah proses mengambil gambar citra dengan menggunakan webcam yang akan disimpan pada laptop. Webcam akan dihubungkan ke laptop menggunakan USB 2.0 sehingga gambar citra dapat dikirim dan diterima oleh laptop untuk diproses pada Matlab. Diagram alir proses pengambilan gambar citra dapat dilihat pada Gambar 3.4..
(43) PLAGIAT MERUPAKAN TINDAKAN TIDAK TERPUJI 26. Mulai. A. Masukan : Citra Alat Stasioneri. Capture. Camera On. Keluaran : Citra RGB. A. Selesai. Gambar 3.4. Diagram alir pengambilan citra.. 3.2.2. Tahap Preprocessing Tahap preprocessing terdiri dari beberapa tahapan, digambarkan dalam diagram alir pada Gambar 3.5. Mulai. Masukan: Citra RGB. Konversi citra RGB ke Biner. Imfill : Menutup lubang citra biner. B. B. Imclose : Memperhalus tepi citra biner. Resizing. Keluaran: Citra preprocessing. Selesai. Gambar 3.5. Diagram alir tahap preprocessing.
(44) PLAGIAT MERUPAKAN TINDAKAN TIDAK TERPUJI 27. Tahap preprocessing diawali dengan mengkonversi citra RGB ke biner. Tahap ini dilakukan agar citra alat stasioneri yang telah diambil menggunakan webcam menjadi hitap dan putih. Tahap ini dilakukan karena hasil gambar dengan webcam C170 memiliki format RGB, Sehingga konversi citra diperlukan agar format citra menjadi citra biner. Menutup lubang pada citra biner menggunakan imfill dan menghaluskan tepi citra biner menggunakan imclose. Setelah itu, citra biner tersebut di resizing sesuai dengan variasi resizing yang telah ditentukan, tahap ini gunanya untuk mengubah jumlah piksel yang besar ke ukuran piksel yang lebih kecil.. 3.2.3. Tahap Ekstraksi Ciri Pada tahapan inilah yang membedakan penelitian ini dengan penelitian yang sebelumnya. Tahap ekstraksi ciri ialah proses yang terpenting dalam pengenalan pola citra. Pada tahapan ini data diolah untuk memperoleh informasi yang kemudian akan dijadikan sebagai data tumpuan untuk membedakan citra yang satu dengan citra yang lainnya. Secara garis besar tahap-tahap ekstraksi ciri dapat dilihat pada Gambar 3.6.. Mulai. Masukan: Citra preprocessing. Deteksi kontur. Tanda Tangan Kontur. Keluaran: Hasil ekstraksi. Selesai Gambar 3.6. Diagram alir ekstraksi ciri..
(45) PLAGIAT MERUPAKAN TINDAKAN TIDAK TERPUJI 28. Hasil dari tahap preprocessing akan menjadi masukan untuk tahap ekstraksi ciri ini. Proses diawali dengan deteksi kontur untuk mengdeteksi tepi objek menggunakan kontur Moore. Diagram alir deteksi kontur dapat dilihat pada Gambar 3.7. E Mulai. Masukan: Citra preprocessing. Piksel berikutnya bernilai 1?. Tidak. Ya. Peroleh piksel awal. Cari piksel bernilai 1 pada 8 tetangga dimulai dari b dan catat pada a. Periksa 8 tetangga searah jarum jam. catat posisi yang mendahului ke b. Catat kontur(1) = 𝑎0 , kontur(2) = 𝑎1 dan jum = 2. Tambahkan b sebagai bagian kontur. Catat a = 𝑎1 dan b = 𝑏1 Tidak. a = 𝑎0 Ya. E Keluaran: Citra kontur. Selesai Gambar 3.7. Diagram Alir Deteksi Kontur. Mengacu pada algoritma 2.1 tahap deteksi kontur pada Gambar 3.7 diawali dengan mencari piksel bernilai 1 pada posisi terkiri dan teratas objek. Posisi piksel dicatat pada 𝑎0 dan piksel berikutnya dicatat pada 𝑏0 . Langkah kedua periksa 8 tetangga searah jarum jam (Gambar 2.9(d)) dimulai dari 𝑏0 . Piksel yang bernilai 1 dicatat pada 𝑎1 . Adapun piksel yang.
(46) PLAGIAT MERUPAKAN TINDAKAN TIDAK TERPUJI 29. mendahului 𝑎1 dicatat pada 𝑏1 . Langkah ketiga catat elemen 𝑎0 pada kontur (1), elemen 𝑎1 pada kontur(2) dan jum = 2. Langkah keempat catat elemen 𝑎1 pada a dan elemen 𝑏1 pada b. Langkah kelima merupakan proses looping apabila pada piksel selanjutnya bernilai 1. Apabila terdapat piksel bernilai 1 maka posisi piksel dicatat pada a serta piksel yang mendahului a dicatat pada b. Penambahan elemen b sebagai bagian kontur. Proses looping akan berhenti jika elemen a = 𝑎0 . Selanjutkan hasil deteksi kontur akan diproses untuk mendapatkan nilai koefisien tanda tangan kontur. Diagram alir proses mendapatkan nilai koefisien tanda tangan kontur dapat dilihat pada Gambar 3.8. berdasarkan algoritma 2.2. diawali dengan masukan citra kontur, setelah itu mencari jumlah piksel batas, lalu menentukan pusat masa objek dalam f, apa bila jarak piksel batas sama dengan 1 maka akan dilakukan pengulangan untuk mencari jumlah piksel batas sampai keluarannya tidak sama dengan 1, apa bila hasilnya tidak sama dengan 1 maka akan ditampilkan pada axes 3. Keluaran hasil ekstraksi ciri akan menjadi masukan untuk fungsi jarak, dimana untuk membandingkan data base dengan hasil ekstraksi ciri guna untuk mencari koefisien yang terendah dan yang terbaik. Berikut ialah gambar 3.8 diagram alir ekstraksi tanda tangan kontur. Mulai. F. Masukan : citra kontur. P=1? Ya Tidak. jumlah piksel batas. Keluaran: jarak sebanyak piksel batas. pusat massa objek dalam f selesai F Gambar 3.8. Diagram alir ekstraksi tanda tangan kontur..
(47) PLAGIAT MERUPAKAN TINDAKAN TIDAK TERPUJI 30. 3.2.4. Proses Fungsi Jarak Proses fungsi jarak merupakan proses selanjutnya setelah ekstraksi ciri. Fungsi jarak yang digunakan yaitu jarak Euclidean. Jarak Euclidean berfungsi sebagai pembanding antara hasil ekstraksi ciri dengan citra alat stasioeri pada basis data. Hasil proses fungsi jarak ini mencari nilai selisih minimum antara hasil ekstraksi ciri dengan citra alat stasioneri pada basis data. Proses fungsi jarak dapat dilihat pada diagram alir Gambar 3.9.. Mulai. Masukan: Hasil ekstraksi ciri, basis data. Perhitungan jarak: Citra hasil ekstraksi ciri dengan basis data. G. Keluaran: Hasil perhitungan jarak. Selesai. G. Gambar 3.9. Dniagram alir fungsi jarak Euclidean. 3.2.5. Penentuan Keluaran Hasil pengenalan alat stasioneri ini ditentukan berdasarkan jarak minimal dari hasil perbandingan antara keluaran dari ekstraksi ciri dengan basis data, dengan menggunakan fungsi jarak Euclidean. Hasil dari proses ini yaitu berupa teks yang akan di tampilkan pada layar monitor. Proses penentuan keluaran digambarkan pada diagram alir Gambar 3.10..
(48) PLAGIAT MERUPAKAN TINDAKAN TIDAK TERPUJI 31. Mulai H Masukan: Hasil perhitungan jarak. Keluaran: Hasil berupa teks. Kode keluaran = kode yang berasosiasi dengan jarak minimal. Selesai. H. Gambar 3.10. Diagram alir penentuan keluaran. 3.3 Basis Data basis data ini digunakan sebagai acuan untuk dibandingkan dengan hasil ekstraksi citra alat stasioneri yang diambil dari webcam. Proses pengambilan basis data dapat dilihat pada blok diagram Gambar 3.11.. Gambar 3.11. Blok diagram basis data.
(49) PLAGIAT MERUPAKAN TINDAKAN TIDAK TERPUJI 32. Mulai. Masukan: Citra Alat Stasioneri. A. Ekstraksi Ciri. Keluaran: Prepocessing. A. Basis Data. Selesai. Gambar 3.12. Diagram alir basis data. Pembuatan basis data pada Gambar 3.12 pada awalnya dengan pengambilan data berupa citra alat stasioneri dangan format gambar yang dihasilkan oleh webcam C170 dalam bentuk jpeg dan ukuran gambar yang dihasikan oleh webcam C170 berkisar 320x240. Selanjutnya, data tersebut diproses pada tahap preprocessing. Tahap preprocessing berfungsi untuk meningkatkan kualitas citra, menutup lubang pada citra biner menggunakan imfill dan menghaluskan tepi citra biner menggunakan imclose, kemudian di resizing serta menentukan citra keluarannya yang akan digunakan sebagai masukan untuk proses berikutnya. Beberapa proses yang dilakukan pada tahap preprocessing yaitu mengkonversi citra RGB ke grayscale yang kemudian dikonversikan ke biner, kemudian untuk menghilangkan noise pada citra digunakan imfill dan imclose, lalu untuk mengecilkan jumlah piksel citra biner menggunakan resizing. Hasil preprocessing akan menjadi masukkan pada tahap ekstraksi ciri. Tahap ekstraksi ciri merupakan tahapan untuk mencari besaran koefisien pada citra yang diawali dengan mendeteksi kontur citra menggunakan kontur Moore. Selanjutnya, mencari nilai koefisien tanda tangan kontur citra dengan menggunakan tanda tangan kontur. Hasil ekstraksi ciri dalam bentuk angka (jarak sebanyak.
(50) PLAGIAT MERUPAKAN TINDAKAN TIDAK TERPUJI 33. piksel batas) [4] dengan format file .mat disimpan dalam satu folder dan digunakan sebagai acuan dalam pengenalan alat stasioneri. Jarak antara webcam dengan alat stasioneri adalah ±50cm.. 3.4 Tampilan GUI Matlab tampilan sistem pengenalan alat stasioneri menggunakan GUI (Graphical User Interface) pada Matlab dengan tujuan membantu dalam proses pengenalan alat stasioneri. tampilan GUI dan diagram alir tampilan sistem dapat dilihat pada Gambar 3.13 dan 3.14.. Gambar 3.13. Tampilan GUI.
(51) PLAGIAT MERUPAKAN TINDAKAN TIDAK TERPUJI 34. Mulai. Masukan : citra alat stasionery. Preprocessing. Keluaran : Hasil Ekstraksi Ciri ditampilkan di GUI. Ekstraksi Ciri. Keluaran : Hasil Citra Biner hasil resizing ditampilkan di GUI. Keluaran : Hasil Pengenalan Citra Berupam Teks ditampilkan di GUI. Selesai. Gambar 3.14. Diagram alir sistem pengenalan alat stasioneri (GUI). Berdasarkan Gambar 3.14 yaitu diagram alir sistem pengenalan alat stasionery menjalankan sistem pada Gambar 3.13 yang dimulai dengan mengklik tombol “Camera On“ pada Axes 1 akan ditampilkan citra alat stasionery secara real time menggunakan webcam. Selanjutnya pengguna menekan tombol “Capture” untuk pengambilan citra alat stasionery yang akan menjadi masukan pada proses ini, gambar citra tersebut akan ditampilkan pada Axes 1. Langkah selanjutnya pengguna memilih variasi resizing yang akan digunakan dengan cara menekan ikon “Variation Resizing”. Setelah pengguna memilih Variasi resizing yang.
(52) PLAGIAT MERUPAKAN TINDAKAN TIDAK TERPUJI 35. diinginkan pengguna dapat menekan tombol “Process” untuk memeroses citra masukan ke tahap preprocessing dan ekstraksi ciri. Langkah selanjutnya pengguna mengklik tombol. “proses” untuk memroses citra masukkan ke tahap preprocessing yang akan ditampilkan pada Axes 2. Kluaran dari preprocessing sebagai masukan untuk tahap berikutnya yaitu tahap ekstraksi ciri, Keluaran pada proses ini berupa teks yang akan ditampilkan pada Axes 3. Keluaran pada proses ini berupa teks yang akan ditampilkan pada Axes 4. Tombol “Reset” berfungsi sebagai pengulangan proses pengenalan alat stasioneri yang akan dilakukan dari awal. Sedangkan pada tombol “End” berfungsi untuk mengakhiri proses pengenalan. Keterangan GUI dapat dilihat pada Tabel 3.1.. Tabel 3.1. Keterangan GUI Nama Bagian. Keterangan. Tombol “Camera On”. Untuk menghidupkan webcam. Tombol “Capture”. Untuk mengambil gambar. Tombol “Process”. Untuk memulai proses pengenalan alat stasioneri. Popupmenu. Untuk memilih variasi resizing. “Variation Resizing” Axes 1 pada panel. Untuk menampilkan citra secara real time dari webcam dan citra. kamera. hasil pengambilan gambar. Axes 2 pada proses. Untuk menampilkan citra hasil preprocessing. preprocessing Axes 3 pada proses. Untuk menampilkan citra hasil ekstraksi ciri. Ekstraksi ciri Tombol “Reset”. Untuk mengulang proses pengenalan dari awal. Tombol “End”. Untuk keluar mengakhiri proses dan keluar dari sistem.
(53) PLAGIAT MERUPAKAN TINDAKAN TIDAK TERPUJI 36. 3.5 Pengujian Citra Alat Stasioneri 3.5.1. Pengujian Data Tidak Langsung Pengujian secara tidak langsung diawali dengan pengambilan citra menggunakan webcam kemudian disimpan dalam sebuah folder. Setiap gambar yang telah diambil dengan webcam diberi nama agar dapat dikenali oleh program Matlab. Pengujian secara tidak langsung menggunakan data yang diperoleh dari 9 alat stasionery. Data tersebut kemudian diproses dengan menggunakan Matlab sebagai data uji yang akan diteruskan ke tahap preprocessing, ekstraksi ciri, dan pencocokan basis data. Data masukan akan dibandingkan dengan data yang ada pada basis data. Hasil akhir dari proses ini akan ditampilkan pada layer monitor berupa teks pada Matlab.. 3.5.2. Pengujian Data Secara Langsung Berdasarkan gambar 3.11 untuk menjalankan sistem secara langsung pengguna menekan tombol “Camera On” untuk mengaktifkan kamera. Selanjutnya menekan tombol “Capture” untuk mengambil gambar objek alat stasionery menggunakan webcam. Pengujian data secara langsung dilakukan dengan cara mengambil gambar 9 objek alat stasionery, data tersebut digunakan sebagai basis data maupun sebagai pengujian secara tidak langsung. Masing-masing alat stasionery memiliki tanda tangan yang berbeda karena bentuknya yang berbeda. Kemudian citra hasil capture tersebut akan diteruskan ke tahap preprocessing yaitu tahap mengkonversi citra RGB ke grayscale, dari grayscale ke biner, lalu ke resizing. Tahap selanjutnya adalah tahap ekstraksi ciri yang dimulai dengan deteksi tepi-tepi kontur menggunakan kontur Moore lalu hasil dari deteksi kontur menjadi masukan dari ekstraksi tanda tangan kontur. Untuk tahap akhir sistem yang akan ditampilkan adalah hasil penentuan keluaran berupa teks pada layar monitor..
(54) PLAGIAT MERUPAKAN TINDAKAN TIDAK TERPUJI. BAB IV HASIL DAN PEMBAHASAN Bab ini akan membahas mengenai proses pengujian program agar diketahui programnya bekerja dengan baik dan sesuai dengan perancangan. Data yang diperoleh dari hasil pengujian memperlihatkan bahwa program yang telah dirancang dapat bekerja dengan baik. Analisis terhadap proses kerja dapat digunakan untuk menarik kesimpulan dari apa yang disajikan dalam penyelesaian tugas akhir.. 4.1. Implementasi Program 4.1.1 Tombol Camera ON Tombol Camera On (Kamera Aktif) fungsinya untuk menghubungkan webcam dengan Matlab yang terdapat pada laptop yang akan ditampilkan pada Axes 1 yang ada pada GUI dalam proses pengenalan alat-alat stasioneri. Program tombol kamera aktif dapat dilihat pada Gambar 4.1. Program ‘winvideo’ digunakan untuk menampilkan informasi dari webcam dan informasi tersebut akan diinisialisasi didalam program agar webcam dengan software dapat saling berhubungan. Dalam proses ini yang akan ditampilkan ialah video, lebar, panjang, resolusi, port webcam dan band dari video. Perintah program preview akan berjalan apabila diperoleh Handles Image. Preview berfungsi untuk menampilkan video pada saat program kamera aktif dijalankan. function pushbutton1_Callback(hObject, eventdata, handles) % hObject handle to pushbutton1 (see GCBO) % eventdata reserved - to be defined in a future version of MATLAB % handles structure with handles and user data (see GUIDATA) % CAMERA ON global vidobj vidobj = videoinput('winvideo',1,'MJPG_320x240'); % Tampilkan pada axes nBands=get(vidobj,'NumberOfBands') hImage=image(zeros(240,320,nBands),'parent',handles.axes1) preview(vidobj,hImage). Gambar 4.1. Program Kamera Aktif. 37.
(55) PLAGIAT MERUPAKAN TINDAKAN TIDAK TERPUJI 38. 4.1.2 Tombol Capture Tombol Capture (Ambil Gambar) berfungsi untuk mengambil gambar alat stasioneri yang digunakan untuk dikenali dan sebagai masukan untuk proses selanjutnya. Mengacu pada Gambar 3.4. program capture (ambil gambar) dapat dilihat pada Gambar 4.2.. function pushbutton2_Callback(hObject, eventdata, handles) % hObject handle to pushbutton2 (see GCBO) % eventdata reserved - to be defined in a future version of MATLAB % handles structure with handles and user data (see GUIDATA) global vidobj global gambar vidobj.FramesPerTrigger=1; triggerconfig(vidobj,'manual'); % Proses capture gambar start(vidobj); pause(0.5); trigger(vidobj); stoppreview(vidobj); frame=getdata(vidobj); gambar=(frame); % SImpan imwrite(gambar,'buku.jpg'); % Tampilkan pada axes axes(handles.axes1); imshow(gambar). Gambar 4.2. program capture (ambil gambar).. Sintaks global berfungsi untuk mendeklarasikan suatu variabel agar dapat digunakan dalam fungsi yang lain dalam file yang sama, sedangkan sintaks getdata berfungsi untuk mengambil citra pada saat kondisi webcam aktif. Citra tersebut kemudian akan diinisialisasi menggunakan handles agar dapat dipanggil dalam file figure dan file.m serta akan ditampilkan pada axes 1. Sintaks imwrite digunakan untuk menyimpan gambar yang telah diambil menggunakan webcam..
(56) PLAGIAT MERUPAKAN TINDAKAN TIDAK TERPUJI 39. 4.1.3 Popupmenu Popupmenu digunakan untuk memudahkan pengguna dalam memilih menu variasi yang akan digunakan. Pengguna dapat memilih variasi yang diinginkan, dalam hal ini popupmenu terdiri dari 10 variasi resizing yaitu 90%, 80%, 70%, 60%, 50%, 40%, 30%, 20% dan 10%. Gambar program untuk popupmenu dapat dilihat pada Gambar 4.3. function popupmenu1_Callback(hObject, eventdata, handles) % hObject handle to popupmenu1 (see GCBO) % eventdata reserved - to be defined in a future version of MATLAB % handles structure with handles and user data (see GUIDATA) % Hints: contents = cellstr(get(hObject,'String')) returns popupmenu1 contents as cell array % contents{get(hObject,'Value')} returns selected item from popupmenu1 %POPUPMENU1 indeks=get(handles.popupmenu1,'value'); switch indeks case 2 variasi=90; case 3 variasi=80; case 4 variasi=70; case 5 variasi=60; case 6 variasi=50; case 7 variasi=40; case 8 variasi=30; case 9 variasi=20; case 10 variasi=10; end handles.variasi=variasi; guidata(hObject,handles);. Gambar 4.3. Program Popupmenu. Berdasarkan Gambar 4.3. pengguna dapat memilih nilai variasi resizing yang digunakan misalnya “variasi=50” artinya variasi yang akan digunakan adalah 50%, begitu juga pada “variasi=10” artinya variasi yang digunakan adalah 10% begitupun seterusnya. Sintaks “handles.variasi” berfungsi agar nilai variasi resizing dapat dipanggil diprogram lain..
(57) PLAGIAT MERUPAKAN TINDAKAN TIDAK TERPUJI 40. 4.1.4 Tombol Process Tombol Process (Proses) merupakan tombol yang berfungsi untuk menjalankan proses dalam pengenalan alat stasioneri. Tombol proses terdiri dari beberapa tahap program, program untuk tahap pertama adalah pembanding basis data, kemudian program preprocessing yang terdiri dari beberapa tahapan yaitu program untuk mengkonversi citra RGB ke biner, program untuk menutup lubang-lubang hitam pada objek menggunakan imfill dan imclose, resizing. program ekstraksi ciri yang terdiri dari beberapa program yaitu, deteksi kontur dan tanda tangan kontur, program jarak Euclidean dan hasil keluaran berupa teks pada GUI Matlab.. 4.1.4.1 Program Pembanding Basis Data Progam ini berfungsi untuk membandingkan data sesuai dengan variasi resizing yang dipilih oleh pengguna pada proses popupmenu. Berikut adalah program popupmenu. %DATA BASE %POPUPMENU if (variasi==90) load dbvar90; panjang=279; elseif (variasi==80) load dbvar80; panjang=247; elseif (variasi==70) load dbvar70; panjang=217; elseif (variasi==60) load dbvar60; panjang=186; elseif (variasi==50) load dbvar50; panjang=154; elseif (variasi==40) load dbvar40; panjang=123; elseif (variasi==30) load dbvar30; panjang=93; elseif (variasi==20) load dbvar20; panjang=62; elseif (variasi==10) load dbvar10; panjang=30; end. Gambar 4.4. Program Basis Data.
(58) PLAGIAT MERUPAKAN TINDAKAN TIDAK TERPUJI 41. Gambar 4.4. merupakan program yang digunakan untuk memanggil data yang ada pada basis data yang kemudian akan dibandingkan dengan masukkan menggunakan jarak Euclidean. Setelah pengguna memilih variasi resizing yang dinginkan misalnya 90% pada popupmenu, maka data tersebut akan dipanggil dan dibandingkan dengan data pada “dbvar90”, begitupun juga jika pengguna memilih variasi yang lainnya.. 4.1.4.2 Program Konversi RGB ke Biner Program konveri RGB ke Biner berfungsi untuk mengubah citra RGB ke citra biner. Berdasarkan diagram alir tahap preprocessing pada Gambar 3.5. Program RGB ke biner dapat dilihat pada Gambar 4.5. %konversi RGB ke biner x = rgb2gray(gambar); level=graythresh(x); A = im2bw(x,level);. Gambar 4.5 Program Konversi Citra RGB ke Biner. Setelah proses capture gambar dilakukan oleh User, data berupa gambar alat stasioneri tersebut kemudian akan dipanggil menggunakan sintaks imread. Kemudian untuk mengubah citra RGB ke citra berskala keabuan atau grayscale dapat menggunakan sintaks “rgb2gray” sesuai dengan persamaan 2.2. Sintaks “graysthresh” merupakan metode yang diimplementasikan dari metode Otsu (persamaan 2.3 sampai 2.8) digunakan untuk mencari nilai ambang secara otomatis. Nilai hasil dari metode tersebut berupa nilai ambang akan dikonversi ke citra Biner menggunakan sintaks “im2bw”. Contoh hasil program RGB ke biner dapat dilihat pada Gambar 4.6.. (a). (b). Gambar 4.6. Konversi Citra RGB ke Biner. (a) Citra Masukan (b) citra grayscale (c) citra hasil konversi gray ke biner..
(59) PLAGIAT MERUPAKAN TINDAKAN TIDAK TERPUJI 42. (c). Gambar 4.6. (Lanjutan) Konversi Citra RGB ke Biner. (a) Citra Masukan (b) citra grayscale (c) citra hasil konversi gray ke biner.. 4.1.4.3 Program Operasi Closing Program Closing ini berfungsi untuk mendapatkan pelebaran terhadap piksel yang bernilai 1 dan menghilangkan lubang-lubang kecil pada citra. Pada operasi Closing ini diperlukan elemen penstruktur untuk menentukan hasil dari Closing. Adapun bentuk elemen penstruktur yang digunakan yaitu imclose pada masing-masing tahapan. Berikut adalah ukuran dan hasil dari elemen penstruktur ditunjukkan pada Gambar 4.7.. (a). (b). Gambar 4.7. Ukuran Elemen Penstruktur. (a) Closing = 15, (b) Closing = 10, (c) Closing = 5.
(60) PLAGIAT MERUPAKAN TINDAKAN TIDAK TERPUJI 43. (c) Gambar 4.7. (Lanjutan) Ukuran Elemen Penstruktur. (a) Closing = 15, (b) Closing = 10, (c) Closing = 5. Berdasarkan Gambar 4.7. citra alat stasioneri yang digunakan adalah buku. Pada gambar tersebut ditunjukkan beberapa elemen penstruktur sehingga ditentukan elemen penstruktur yang paling tepat digunakan yaitu ukuran matrik 15x15 yang berisi ‘1’. Pada closing matrik 15x15 tersebut dapat membuat gambar lebih halus pada pinggirannya dan menutupi semua lubang-lubang kecil pada objek. Berdasarkan diagram alir Gambar 3.5 program untuk operasi dilasi dapat dilihat pada Gambar 4.8. %OPERASI CLOSING BW=imfill(A,'holes'); BW=imclose(BW,strel('square',15)); Gambar 4.8. Program Operasi Closing. 4.1.4.4 Program Resizing Program Resizing berfungsi untuk mengubah ukuran dari suatu citra dengan mengurangi atau menambahkan jumlah piksel dari citra tersebut. Dalam hal ini citra akan divariasikan dalam 9 resizing yaitu 90%, 80%, 70%, 60%, 50%, 40%, 30%, 20% dan 10%. Hasil dari resizing akan menjadi masukan pada program ekstraksi ciri. Berikut adalah program dari resizing dituliskan dalam Gambar 4.9..
(61) PLAGIAT MERUPAKAN TINDAKAN TIDAK TERPUJI 44. BW=imresize(BW,variasi1);. Gambar 4.9. Program Resizing. Sintaks “imresize” digunakan untuk meresizing citra ke ukuran yang diinginkan. Sedangkan “BW” merupakan citra hasil dari dilasi, “variasi1” merupakan besarnya resizing contohnya jika 30% maka ukuran yang dimasukkan adalah 30/100 sama dengan 0.3, jika 20% maka ukuran yang dimasukkan adalah 20/100 sama dengan 0.2 dan begitupun untuk variasi resizing yang selanjutnya. Gambar 4.10 berikut adalah ukuran resizing dan hasilnya.. Hasil Dilasi. Resizing 90%. Resizing 30% Resizing 50%. Resizing 10% Resizing 20%. Gambar 4.10 Variasi Resizing.
(62) PLAGIAT MERUPAKAN TINDAKAN TIDAK TERPUJI 45. 4.1.4.5 Ekstraksi Ciri Pada program ektraksi ciri digunakan untuk mengambil informasi yang terdapat dalam suatu citra yang kemudian akan digunakan sebagai parameter/nilai untuk membedakan suatu objek dengan objek lainnya. Berdasarkan diagram alir tahap ekstraksi ciri Gambar 3.6 program ekstraksi ciri dapat dilihat pada Gambar 4.11. Program “deteksikontur” merupakan program yang digunakan untuk mendapatkan koordinat tepi (kontur) dari objek alat stasioneri. Selanjutnya fungsi dari program “tandatangan” adalah untuk mendapatkan koefisien tanda tangan. %EKSTRAKSI CIRI KM=deteksikontur(double(BW)); T=tandatangan(KM,BW); T(panjang)=0;. Gambar 4.11. Program Ektraksi Ciri. 4.1.4.6 Program Pembanding Jarak Euclidean Pada program pembanding jarak ini menggunakan jarak Euclidean sebagai pembanding hasil antara ekstraksi ciri dengan basis data. Berdasarkan diagram alir jarak Euclidean pada Gambar 3.9. Program yang digunakan dapat dilihat pada Gambar 4.12. %FUNGSI JARAK j(1)=sqrt(sum((T-db{1}).^2)); j(2)=sqrt(sum((T-db{2}).^2)); j(3)=sqrt(sum((T-db{3}).^2)); j(4)=sqrt(sum((T-db{4}).^2)); j(5)=sqrt(sum((T-db{5}).^2)); j(6)=sqrt(sum((T-db{6}).^2)); j(7)=sqrt(sum((T-db{7}).^2)); j(8)=sqrt(sum((T-db{8}).^2)); j(9)=sqrt(sum((T-db{9}).^2));. Gambar 4.12. Program Pembanding Jarak Euclidean. Program pada gambar 4.12 digunakan untuk memanggil fungsi jarak Euclidean, adapun variabel yang akan dibandingkan adalah ektraksi ciri yaitu “T” atau tanda tangan kontur dari objek dengan basis data yaitu “db{1}” sampai dengan “db{9}. Sintaks “minj”.
Gambar
+7
Dokumen terkait
Dari hasil penelitian “Pengaruh Penggunaan Medan Magnet Pada Pipa Saluran Bahan Bakar Bensin Terhadap Konsumsi Bahan Bakar Dan Emisi Gas Buang Pada Mesin 1800
Pengertian syariah dijelaskan dalam Undang-Undang Nomor 10 Tahun 1998, pasal 13 yaitu prinsip syariah adalah aturan perjanjian berdasarkan hukum Islam antara bank
Pada penelitian ini tidak dilakukan pretes, dengan pertimbangan, kelas eksperimen dan kelas kontrol diasumsikan mempunyai kemampuan berpikir kritis atau disposisi
Efek Antiinflamasi Doksisiklin Terhadap Volume Ekspirasi Paksa Detik Pertama, Matriks Metalloproteinase-9 serum, dan High Sensitif C-Reaktif Protein Serum Pada Penyakit
Penetapan (isbat) awal Ramadan dan awal Syawal dilakukan oleh pemerintah berdasakan data hisab dan hasil rukyat sebagai masukan. 39 Penetapan awal bulan kamariah di
Akhirnya, kepada Kantor Bahasa Sulawesi Tenggara kami menyampaikan penghargaan dan terima kasih atas usaha ini, semoga pikiran-pikiran yang telah disumbai^kan ini dapat
Dalam menunjang Visi, Misi dan Program Kepala dan Wakil Kepala Daerah dalam bidang sumber daya air, maka makna yang terkandung dari visi tersebut adalah “Sulawesi Tengah
