RANCANG BANGUN ALAT PENANGKAP HAMA WERENG
BERDASARKAN PENGARUH WARNA CAHAYA LED
TUGAS AKHIR
Untuk memenuhi sebagian persyaratan Untuk mencapai derajat Sarjana S-1
Program Studi Teknik Elektro
Oleh :
SATRIA PINANDITA E11.2009.00309
PROGRAM STUDI TEKNIK ELEKTRO FAKULTAS TEKNIK
UNIVERSITAS DIAN NUSWANTORO 2014
RACANG BANGUN ALAT PENANGKAP HAMA WERENG BERDASARKAN PENGARUH WARNA CAHAYA LED
SATRIA PINANDITA E11.2009.00309
ABSTRAK
Indonesia merupakan Negara agraris yang sebagaian penduduknya bermata pencaharian sebagai petani. Petani padi di dalam usaha pertaniannya banyak mengalami kendala di lapangan, salah satunya serangan hama tanaman. Hama wereng merupakan hama penting bagi petani padi. Kondisi saat ini para petani masih mengendalikan hama wereng menggunakan pestisida. Pestisida adalah racun bagi : manusia, musuh alami hama wereng dan lingkungan sekitarnya. Wereng ternyata memiliki sifat tertarik pada cahaya, dengan sifat tersebut diciptakan alat mekanik untuk menarik hama wereng mengunakan cahaya lampu untuk pengendalian. Tujuan penelitian ini adalah 1) merancang alat penangkap hama wereng berdasarkan pengaruh warna cahaya LED, 2) meneliti pengaruh warna cahaya LED terhadap ketertarikan hama wereng.
Penelitian dilakukan pada bulan Juli – Desember 2013. Tempat penelitian di laboratorium digital Teknik Elektro Universitas Dian Nuswantoro Semarang, dan uji coba alat di sawah milik petani di Dusun Mundingan Kelurahan Cepoko Kecamatan Gunungpati Semarang.
Alat pengendali hama wereng ini meliputi 3 buah sensor gerak, dan lampu LED berwarna (Merah, Hijau, Kuning, Biru, dan Putih) dan Accu 12Volt. Alat yang dibuat terdapat corong penyedot berbentuk kerucut dengan lampu dipasang dibagian dalam mengelilingi corong. Ketika alat dinyalakan, lampu akan menyala untuk menarik wereng datang. Ketika wereng datang sensor gerak memberikan sinyal dan mengaktifkan mikrokontroler yang berada satu kotak dengan kotak penampung hama, kemudian wereng tersedot secara otomatis masuk ke dalam kotak penampung hama melalui pipa paralon. Penambahan 2 (dua) buah tali pengikat pada kotak penampung hama dimaksukan untuk mempermudah mobilitas alat dan memungkinkan dapat dipakai di punggung petani. Untuk menghindari keluarnya hama wereng dari dalam kotak penampung, maka pipa paralon dibuat menyerupai leher angsa dan ditambahkan katup penutup pada pipa paralon.
Hasil uji coba alat dilakukan di laboratorium dengan hasil alat dapat berfungsi dengan baik. Rangkaian sistem minimum mikrokontroler AT-Mega 16 dapat memproses input dan menghasilkan output. Sensor gerak diuji dengan diberi inputan gerakan dan jika terpicu suatu gerakan maka dihasilkan beda potensial tegangan. Lampu LED diuji dengan menghubungkan dengan aki sehingga lampu LED dapat menyala. Rangkaian driver motor DC diberi inputan dari output sistem mikrokontroler sehingga output driver motor dapat memutarkan motor DC. Motor DC diuji dengan menghubungkan dengan aki sehingga motor DC dapat berputar, dan aki diuji dengan cara mengukur tegangan dan arus yang tersimpan dalam aki.
Alat diuji pengaruh variasi warna lampu LED berwarna (Merah, Putih, Hijau, Kuning dan Biru) di lapangan (sawah) untuk mengetahui ketertarikan hama wereng. Pengujian dilakukan pada sawah yang ditanami padi yang terserang wereng pada saat petang (18.00-19.00). Pengujian dilakukan pada sawah dengan luas 4m2 untuk tiap warna lampu LED. Pada saat pengujian alat dengan alokasi waktu selama 10 menit untuk setiap warna lampu. Setiap satu seri pengujian yang terdiri 5 jenis warna lampu yaitu merah, hijau, kuning, biru, dan putih. Perlakuan diulang sebanyak 5 kali dengan tempat yang berbeda.
Hasil ujicoba di lapangan diperoleh data rekapitulasi jumlah wereng yang tertangkap. Lampu LED warna putih rata-rata dapat menarik 149 ekor, Biru 148 ekor, Merah 115 ekor, Hijau 72 ekor, dan Kuning menarik 66 ekor. Data kemudian dianalisis statistik dengan menggunakan perangkat lunak SPSS. Hasil analisis Anova diperoleh nilai F-hitung = 12.121 dan n F-tabel = 2,87, dengan taraf signifikansi α = 0.05. Hasilnya F-hitung> F-tabel = (12.121 > 2.87). Analisis menunjukkan ada perbedaan yang nyata pengaruh warna lampu terhadap jumlah wereng yang tertangkap.
Saran yang bisa diberikan yaitu melakukan penelitian lanjut, tentang uji intensitas cahaya lampu LED sebesar > 100 lux. Menggunakan lampu halogen 12V. Agar tercipta alat pengendali hama wereng mekanik yang efisiens, dan mobile.
KATA PENGANTAR
Alhamdulillah, dengan memanjatkan puji syukur kehadirat Allah SWT yang
telah melimpahkan rahmat, taufik serta hidayahnya, penulis dapat menyelesaikan Tugas Akhir yang berjudul “RANCANG BANGUN ALAT PENANGKAP HAMA WERENG BERDASARKAN PENGARUH WARNA CAHAYA LED”.
Tugas Akhir ini tidak akan tersusun tanpa adanya bantuan dari berbagai pihak secara langsung maupun tidak langsung. Oleh sebab itu pada kesempatan ini penulis menyampaikan ucapan terima kasih kepada:
1. Dr. Ir. Edi Noersasongko, M.Kom, selaku Rektor UDINUS.
2. Dr. Eng. Yuliman Purwanto, M. Eng selaku Dekan Fakultas Teknik. 3. Dr. Dian Sawitri M.Eng selaku Ketua Program Studi Teknik Elektro 4. Ir. Wisnu Adi P, M. Eng selaku dosen pembimbing I dan dosen wali. 5. Dr. I Ketut Swakarma MT selaku dosen pembimbing II.
6. Dosen-dosen pengampu di Program Studi Teknik Elektro Universitas Dian Nuswantoro Semarang yang telah memberikan ilmunya pada penulis. 7. Kedua orang tuaku yang selalu memberikan doa, dukungan moril maupun
materiel agar terselesaikannya Tugas Akhir ini.
8. Adiku tercinta Devita Diatri yang selalu membantu penelitian di sawah dan dukungannya.
9. Teman-teman angkatan 2009 di Teknik Elektro yang telah berjuang bersama selama duduk di bangku kuliah.
10. Bapak Lilik Sutresno yang telah meminjamkan sawahnya untuk penelitian. Akhir kata, semoga Laporan Tugas Akhir ini dapat bermanfaat menambah khasanah ilmu pengetahuan dan berguna bagi kemajuan Teknik Elektro Universitas Dian Nuswantoro.
Semarang, 13 Februari 2014 Penulis
MOTTO
“Allah akan meninggikan orang yang beriman diantaramu dan orang-orang yang diberi ilmu pengetahuan beberapa derajat”.(QS Al-Mujaadilah : 11)
“Sebaik-baik sedekah itu akan belajar suatu ilmu kemudian mengajarkannya kepada saudaranya” (HR. Ibnu Majah)
“Agama tanpa ilmu pengetahuan akan pincang, sedangkan ilmu tanpa agama akan buta”. (Albert Einstein)
“Jadilah seperti karang di lautan yang kuat dihantam ombak karena hanya kepada-Nya lah kita dapat meminta dan memohon”
“Jika kamu ingin dihargai orang lain, maka kamu harus menghargai orang lain tapi jika tidak bisa menghargai orang lain jangan harap kamu dihargai orang”
DAFTAR ISI Isi Hal JUDUL ……….. i HALAMAN PENGESAHAN ………..………..……….. ii ABSTRAK ……… iii PERNYATAAN ………..………..………..…………. v KATA PENGANTAR ………..………..……….. vi MOTO ………..………..………..………. vii
DAFTAR ISI ………..………..………..……….. viii
DAFTAR GAMBAR ………..………..……… xi
DAFTAR TABEL ………..………..………. xiii
DAFTAR LAMPIRAN ………..………..………. xiv
BAB I. PENDAHULUAN……….………..……… 1
A. Latar Belakang Masalah ………..………..……….. 1
B. Perumusan Masalah ………..………..……… 2
C. Tujuan Penelitian ………..………..……… 2
D. Batasan Masalah ………..………..……… 2
D. Manfaat Penelitian ………..………..……….. 3
BAB II. TINJAUAN PUSTAKA ………..………..………….. 4
A. Wereng ………..………..………..……….. 4
B. Sistem Mikrokontroler At-Mega 16 ………..……….. 7
C. Driver Motor DC ………..………..………. 7
D. Motor DC ………..………..………. 10
E. Sensor Gerak (Optocoupler) ………..………..………... 10
F. Light Emiting Diode (Led) ………..………... 12
G. Sumber Daya Aki (Accu) ………..………..……… 13
I. Metode Statistik ……….. 15
BAB III . METODE PENELITIAN ………..………..……… 19
A. Waktu Dan Tempat Penelitian ………..……….. 19
B. Jenis Penelitian ………..………..……… 19
C. Objek Penelitian ………..………..……….. 19
D. Bahan Dan Alat ………..………..………... 19
E. Tahapan Penelitian ………..………..……….. 20
1. Analisi Kebutuhan ………..………..………. 20
2. Perancangan Desaian Alat ………..………..……… 20
a. Hardware………..………..……… 22
1) Sistem minimum mikrokontroler ……….. 23
2) Lampu led ………..………..………. 24
3) Sensor gerak ………..………..……….. 24
4) Driver motor ………..………..………. 26
5) Kebutuhan daya pada alat ………..………... 28
b. Perangkat lunak………..………..………... 28
3. Pembuatan Alat ………..………..………. 28
a. Hardware ………..………..………. 28
1) Sistem Minimum Mikrokontroler AT-Mega 16 …………... 28
2) Sensor Gerak ………..………..………. 29
3) Driver Motor DC ………..………. 30
4) Rangkaian Catu Daya ………..………. 30
b. Perangkat lunak ………..………..……….. 31
4. Uji Coba Alat ………..………..……… 31
a. Di Laboratorium ………..………..……….. 31
b. Di Lapangan Atau Sawah ………..………. 31
5. Rancangan Statistik ……….. 33
6. Pengumpulan Data Dan Analisis ………..……… 33
b. Di lapangan atau sawah ………..………. 33
BAB IV. HASIL DAN PEMBAHASAN ………..……… 34
A. Hasil Uji Coba Alat Di Laboratorium ………..………... 34
1. Pengujian Rangkaian System Mikrokontroler ……….. 34
2. Pengujian Rangkaian Catu Daya ………..………. 35
3. Pengujian Rangkaian Sensor Gerak ………..……… 36
4. Pengujian Driver Motor DC ………..……… 36
5. Pengujian Perangkat lunak ………..………..……… 37
6. Pengujian Alat Keseluruhan ………..……… 39
B. Pengumpulan Data Hasil Pengujian Di Lapangan ……….. 40
1. Mengukur luasan sawah ………..………. 41
2. Hasil Uji Coba Alat Ulangan Pertama ………...……….. 43
3. Hasil Uji Coba Alat Ulangan Kedua ……….…. 44
4. Hasil Uji Coba Alat Ulangan Ketiga ………... 46
5. Hasil Uji Coba Alat Ulangan Keempat ………...…. 48
6. Hasil Uji Coba Alat Ulangan Kelima ………...……… 50
7. Analisis hasil rekapitulasi rata-rata jumlah wereng tertangkap …… 51
BAB V. PENUTUP ………...………..………... 54
A. Kesimpulan ………..……..………..………... 54
B. Saran ………….………..………..………... 55
DAFTAR PUSTAKA ………..………..……….. 56
DAFTAR GAMBAR
Isi Hal
Gambar 1. Foto wereng coklat ………..………..………… 4 Gambar 2. Foto pengendalian wereng dengan pestisida ……..……..…… 5 Gambar 3. Siklus hidup hama wereng ……..……..……..……..……..… 6 Gambar 4. Foto IC AT-Mega 16 ……..……..……..……..……..……..… 7 Gambar 5. EMS 30 A H-Bridge ……..……..……..……..……..……..…… 8 Gambar 6. Rangkaian Skematik Driver Motor H.Bridge 30A ……..……… 8 Gambar 7. Konfigurasi pin Driver Motor H-Bridge 30A ……..……..…… 9 Gambar 8. Foto motor DC ……..……..……..……..……..……..……..… 10 Gambar 9. Foto sensor gerak (Optocoupler) ……..……..……..……..… 11 Gambar 10. Rangkaian skematik optocoupler ……..……..……..………… 11 Gambar 11. LED dan LED Flexibel ……..……..……..……..……..……… 12 Gambar 12. Aki Kering ……..……..……..……..……..……..……..…… 14 Gambar 13. Blok alur tahapan penelitian ……..……..……..……..……… 20 Gambar 14. Alat penangkap wereng tampak depan ……..……..………… 21 Gambar 15. Rancangan corong desain alat pengendali hama wereng …… 22 Gambar 16. Diagram blok sistem perangkat penangkap wereng ………… 22 Gambar 17. Sistem Minimum Mikrokontroler ATmega 16 ……..………… 24 Gambar 18. Rangkaian skematik sensor gerak ……..……..……..………… 25 Gambar 19. Rangkaian Skematik Driver Motor H.Bridge 30A ……..…… 26 Gambar 20. Rangkaian Catu Daya (+5V) ……..……..……..……..……… 28 Gambar 21. Foto sistem minimum mikrokontroler AT-Mega 16 ……..… 29 Gambar 22. Foto sensor gerak ……..……..……..……..……..……..……. 29 Gambar 23. Foto driver motor EMS H-Bridge 30A ……..……..……..…… 30 Gambar 24. Foto Catu Daya 5Volt ……..……..……..……..……..……… 30 Gambar 25. Diagram alur pengujian catu daya 5 volt ……..……..……..… 35 Gambar 26. Flowchart Alat Penangkap Hama Wereng ……..……..……… 38 Gambar 27. Foto Sawah di Dusun Mundingan, Gunungpati ……..……… 41
Gambar 28. Foto sawah ukuran 4m2 yang akan di uji coba ……..……..… 41 Gambar 29. Foto Peralatan Penangkap Hama Wereng ……..……..…… 42 Gambar 30. Foto sawah ukuran 4m2pada pukul 18.00 ……..……..……… 42 Gambar 31. Foto Pengujian alat penangkap wereng uji coba pertama …… 43 Gambar 32. Foto hasil pengujian wereng yang tertangkap uji coba pertama 43 Gambar 33. Grafik jumlah wereng tertangkap berdasarkan warna LED uji coba pertama ……..……..……..……..……..……..……..…… 44 Gambar 34. Foto Pengujian alat penangkap wereng uji coba kedua ……… 45 Gambar 35. Foto Hasil Pengujian Uji coba kedua ……..……..……..…… 45 Gambar 36. Grafik jumlah wereng tertangkap berdasarkan warna lampu
uji coba kedua ……..….……..……..……..……..……..…… 46 Gambar 37. Foto Pengujian alat penangkap wereng uji coba ketiga ……… 47 Gambar 38. Foto Hasil Pengujian Uji coba ketiga ……..……..……..…… 47 Gambar 39. Grafik Jumlah wereng tertangkap berdasarkan warna lampu uji coba ketiga ……..……..……..……..……..……..……….. 48 Gambar 40. Foto Pengujian alat penangkap wereng uji coba keempat …… 48 Gambar 41. Foto Hasil Pengujian Uji coba keempat ……..……..………… 49 Gambar 42. Grafik jumlah wereng tertangkap berdasarkan warna lampu uji coba keempat …..……..……..……..……..……..………
49
Gambar 43. Foto Pengujian alat penangkap wereng uji coba kelima …… 50 Gambar 44. Foto Hasil Pengujian Uji coba kelima ……..……..……..… 50 Gambar 45. Grafik jumlah wereng tertangkap berdasarkan warna lampu uji coba kelima ……..……..……..……..……..……..……..…… 51 Gambar 46. Grafik 6 rata-rata jumlah wereng tertangkap berdasarkan
DAFTAR TABEL
Isi Hal
Tabel 1. Konfigurasi pin Driver Motor H-Bridge 30A ……..……..…….. 9 Tabel 2. Warna dan panjang gelombang LED ……..……..……..……..… 13 Tabel 3. Analisis data pengaruh perlakuan ……….…….……. 16 Tabel 4. Daftar Ansira pengaruh perlakuan menurut RAL ……..…….…… 17 Tabel 5. Pengamatan dan pengujian . …….…….…….…….…….…….… 32 Tabel 6. Hasil pengujian system minimum ATmega 16 …….…….…….… 35 Tabel 7. Pengujian rangkaian catu daya …….…….…….…….…….……. 36 Tabel 8. Hasil pengujian rangkaian sensor gerak …….…….…….…….… 36 Tabel 9. Pengujian driver motor H-Bridge 30A …….…….…….…….…… 37 Tabel 10. Rekapitulasi jumlah wereng yang tertangkap …….…….…….… 51 Table 11. Uji Anova …….…….…….…….…….…….…….…….…….… Tabel 12. Rerata jumlah wereng tertangkap dari 5 warna lampu …………
52 53
DAFTAR LAMPIRAN
Isi Hal
Surat Pernyataan ……… 63 EMS H-BRIDGE 30 A ...……..………. 64 Data Sheet At Mega 16...……..……..……..……..….. 66
BAB I PENDAHULUAN
A. Latar Belakang Masalah
Padi (Oryza sativa L) merupakan komoditas penting karena merupakan makanan pokok hampir setengah penduduk dunia di mana sebagian besar berasal dari negara berkembang termasuk Indonesia [1]. Banyak usaha yang telah dilakukan oleh pemerintah untuk meningkatkan produktivitas padi, walaupun selalu mendapat hambatan. Hama merupakan salah satu kendala yang menyebabkan hasil panen menurun, karena serangannya pada bagian akar, batang, daun, maupun bulir padi [2].
Wereng batang cokelat (WBC) (Nilaparvata lugens Stål) merupakan hama penting tanaman padi di Indonesia. Wereng ini mampu berkembang biak membentuk populasi cukup besar dalam waktu singkat dan merusak tanaman pada semua fase pertumbuhan [3].
Wereng tinggal di pangkal batang padi, ukurannya kecil-kecil, jumlahnya banyak, aktif bergerak. Serangga ini mempunyai siklus hidup 3-4 minggu yang dimulai dari telur (7-10 hari), nimfa (8-17 hari), imago (18-28 hari). Nimfa (wereng pra dewasa) dan imago (wereng dewasa) menghisap cairan dari batang padi [5].
Wereng coklat dewasa sangat tertarik dengan cahaya. Daya tarik tersebut merupakan sifat fototaksis yang ada pada serangga umumnya. Serangga mampu memberikan respon terhadap cahaya dengan panjang gelombang antara 300-400 nm (warna mendekati ultrafiolet) sampai 600-650 nm (warna jingga) [6].
Pengendalian WBC saat ini masih menggunakan penyemprotan pestisida. Penggunaan pestisida dengan intensitas tinggi dan dilakukan secara terus menerus akan menyebakan pencemaran pada lingkungan pertanian serta racun bagi manusia. Apabila zat tersebut disemprotkan pada tanaman padi ada kemungkinan tanaman padi tersebut terkontaminasi dan sangat berbahaya bagi
manusia [4]. Pestisida dapat membahayakan petani apabila cairan pestisida terkena tubuh.
Saat ini sudah ada alat mekanik yang digunakan untuk menarik populasi wereng. Namun alat mekanik yang sudah ada hanya mengendalikan hama wereng pada faseimago [3]. Fase imago adalah hama wereng dewasa (Hama wereng yang sudah memiliki sayap dan dapat berpindah tempat dengan cara terbang). Oleh sebab itu perlu dibuat rancang bangun alat mekanik tanpa pestisida, yang dapat mengendalikan populasi hama wereng pada fase nimfa dan imago. Fase nimfa adalah hama wereng yang baru berumur 1-7 hari yang belum memiliki sayap. Pengendalian hama wereng fase nimfa yang dilakukan dengan cara memanfaatkan sifat wereng yang tertarik pada cahaya sehingga alat ini dapat difungsikan sejak dini dan ramah lingkungan.
B. Perumusan Masalah
Berdasarkan latar belakang, rumusan masalah yang diajukan adalah:
1. Bagaimana rancang bangun bentuk alat penangkap hama wereng berdasarkan pengaruh warna cahaya LED?
2. Bagaimana pengaruh warna cahaya LED terhadap ketertarikan hama wereng?
C. Tujuan Penelitian
Tujuan dari tugas akhir ini adalah:
1. Rancang bangun alat penangkap hama wereng berdasarkan pengaruh warna cahaya LED.
2. Meneliti pengaruh warna cahaya LED terhadap ketertarikan hama wereng.
D. Batasan Masalah
Batasan masalah pada tugas akhir ini antara lain :
1. Alat penangkap hama wereng menggunakan lampu LED (Light Emiting
Diode). Lampu LED memiliki spectrum warna warni (merah, hijau,
2. Alat penyedot otomatis dan sensor gerak yang digunakan yaitu octocoupler, sebagai saklar electric yang bekerja secara otomatis apabila mendeteksi benda bergerak.
3. Pengendalian hama wereng dilakukan pada malam hari, dan difokuskan pada hama wereng fase nimfa (wereng yang tidak memiliki sayap pra dewasa).
E. Manfaat Penelitian
1. Tercipta alat penangkap hama wereng yang menggunakan warna cahaya LED tanpa pestisida, ramah lingkungan dan aman bagi kesehatan.
2. Diketahuinya pengaruh warna cahaya LED terhadap ketertarikan hama wereng.
BAB II
TINJAUAN PUSTAKA
A. Wereng
Dalam taksonomi hama, wereng batang coklat masuk kedalam Kelas:
Insecta; Ordo Hemiptera; Famili Delphacidae; Genus Nilaparvata; Spesies:
Nilaparvata lugens (Stal). Wereng merupakan hama yang menyerang batang
padi, menghisap sari makanan sehingga mengakibatkan daun tanaman menguning. Wereng memiliki tubuh yang sangat kecil lebih kecil dari ujung pena.Wereng selain hama padi juga menjadi vektor bagi penularan sejumlah penyakit tumbuhan penting, khususnya dari kelompok virus [5]. Wereng coklat ditunjukkan pada Gambar 1, dan pengendalian hama wereng selama ini masih menggunakan pestisida dapat ditunjukkan Gambar 2.
Gambar 1. Foto wereng coklat [18]
Wereng batang coklat berkembang biak secara sexual, masa pra peneluran 3-4 hari untuk brakiptera (bersayap kerdil) dan 3-8 hari untuk makroptera (bersayap panjang). Telur diletakkan secara berkelompok pada jaringan pangkal pelepah daun, tetapi kalau populasinya tinggi telur diletakkan di ujung pelepah dan tulang daun.
Wereng betina mampu meletakkan telur 100-500 butir. Telur menetas setelah 7-10 hari. Muncul wereng muda yang disebut nimfa dengan masa hidup 12-15 hari dan setelah fase ini menjadi wereng dewasa [18].
Gambar 2. Foto pengendalian wereng dengan pestisida [5]
Dalam perkembangan hidupnya, wereng batang coklat mempunyai tiga stadium pertumbuhan yaitu stadium telur, nimfa dan dewasa. Gambar 3 menjelaskan siklus hidup hama wereng batang coklat.
Nimfa dapat berkembang menjadi dua bentuk wereng dewasa. Bentuk pertama adalah makroptera (bersayap panjang) yaitu wereng batang coklat yang mempunyai sayap depan dan sayap belakang normal. Bentuk kedua adalah brakiptera (bersayap kerdil) yaitu wereng batang coklat dewasa yang mempunyai sayap depan dan sayap belakang tumbuh tidak normal, terutama sayap belakang sangat rudimenter [18].
Stadium telur membutuhkan waktu antara 7-11 hari. Nimfa yang baru menetas berwarna keputihan dan berangsur menjadi coklat. Stadium nimfa terjadi 5 kali pergantian kulit dan waktu yang dibutuhkan pada masing-masing instar adalah 2-4 hari. Wereng batang coklat dewasa mempunyai dua bentuk, sayap panjang (makroptera) dan sayap pendek (brakiptera). Bentuk
brakiptera populasi penetap. Suhu optimum untuk perkembangan antara 18-280C [18].
Gambar 3. Siklus hidup hama wereng [18]
Wereng batang coklat yang berkembang pada tanaman padi ketika membentuk anakan. Wereng bersayap panjang berpindah dari tempat satu ketempat yang lain. Jika wereng yang berkembang pada tanaman padi yang berumur 2 atau 3 minggu setelah tanam, maka wereng bisa berkembang biak menjadi dua generasi. Tetapi bila wereng yang menyerang tanaman padi yang berumur 5-6 minggu setelah tanam, wereng yang berkembang biak hanya satu generasi yang puncak populasinya terjadi pada padi umur 9-10 minggu setelah tanam [5].
Serangan wereng batang coklat yang berat disebut juga ledakan wereng batang coklat, tidak terjadi sepanjang tahun, tetapi hanya pada waktu tahun-tahun tertentu, yaitu pada musim hujan dan musim kemarau yang banyak terjadi hujan (la nina). Semua stadia wereng coklat mulai dari nimfa sampai imago menghisap cairan jaringan tanaman. Stadia yang paling ganas adalah nimfa instar yang berumur 1-3 hari [18].
B. Sistem MikrokontrolerAT-Mega 16
Mikrokontroler merupakan alat elektronika digital yang mempunyai program input dan output yang dapat ditulis dan dihapus dengan cara khusus. Mikrokontroler AT-Mega secara umum digunakan untuk berbagai keperluan sistem kontrol, contohnya untuk membuat rancang bangun alat pengukur suhu tubuh [7], dan kontrol pengendalian robotika yang berbasis mikrokontroler [19]. Bentuk IC AT-Mega 16 ditunjukkan pada Gambar 4.
Gambar 4.Foto IC AT-Mega 16[8].
C. Driver Motor
Driver motor digunakan untuk mengontrol kecepatan, contohnya tipe EMS 30A H-Bridge. Masukan dari rangkaian driver ini terdiri dari logika high atau low yang berasal dari sistem minimum mikrokontroler untuk mengatur putaran motor. Pada inputan enable diberi input high untuk berputar dan low untuk stop.
EMS 30 A H-Bridge memiliki dua buah rangkaian H-Bridge di dalamnya, sehingga dapat digunakan untuk drive dua buah motor DC. EMS 30 A H-Bridge masing-masing dapat mengantarkan arus hingga 30A dan mendukung tegangan beban dari 5,5 V sampai 36 V (IC VNH2SP30 hanya sampai 16V), mendukung kontrol PWM dengan frekuensi sampai 20 Khz. EMS 30 A H-Bridge memiliki proteksi hubungan singkat dan proteksi overtemperature. EMS 30 A H-Bridge memiliki dimensi : 7,4 cm (p) x 6,1 cm (l) x 1,9 cm (t)[22]. Driver motor EMS 30 A H-Bridge dapat ditunjukkan pada Gambar 5.
Gambar 5. EMS 30 A H-Bridge [22].
Gambar 6. Rangkaian Skematik Driver Motor H. Bridge 30A [10] Pengujian driver motor H-Bridge dilakukan dengan cara pertama hubungkan sumber catu daya untuk input (VCC) dan catu daya untuk beban (VMot). Kemudian berikan sebuah inputan logika (+5V) dan inputan logika (0V) pada pin (MIN1, MEN1, dan MPWM). Maka pada MOUT1 akan
menghasilkan tegangan untuk memutarkan motor DC. Konfigurasi pin driver motor H-Bridge 30A dapat dilihat pada Gambar 7.
Gambar 7. Konfigurasi pin Driver Motor H-Bridge 30A [10] Tabel 1. Konfigurasi pin Driver Motor H-Bridge 30A [10]:
No. Pin Nama I/O Fungsi
1 MIN1 I Pin input untuk menentukan output MOUT1
3 MEN1 I/O
Pin enable untuk output MOUT1
Diberi logika High untuk mengaktifkan half HBridge 1, diberi logika Low secara eksternal untuk menonaktifkan half H-Bridge 1
Jika terjadi kondisi Fault (thermal shutdown, undervoltage, overvoltage, dsb.), maka pin ini akan ditarik Low secara internal oleh modul H-Bridge untuk melaporkan adanya kondisi Fault.
5 MCS O
Output tegangan analog yang berbanding lurus dengan arus beban (Range output 0 – 5 Volt) Tersedia untuk IC VNH2SP30
6 MPWM I Pin input untuk mengatur kerja modul H-Bridge secara PWM
7, 9 VCC - Terhubung ke catu daya untuk input (5 Volt) 8, 10 PGND - Titik referensi untuk catu daya input
MOUT1 - Output ke beban dari half H-Bridge pertama V MOTOR
(V MOT) -
Terhubung ke catu daya untuk output ke beban
D. Motor DC
Motor DC adalah motor arus searah, dapat digunakan menjadi sistem kendali kecepatan motor DC. Salah satu jenis motor DC yaitu motorDC brush dapat berfungsi sebagai motor listrik apabila di dalam motor listrik tersebut terjadi proses konversi dari energi listrik menjadi energi mekanik. Motor DC tipe brush dapat ditunjukkan pada Gambar 8.
Gambar 8. Foto motor DC.
Motor DC tersebut memerlukan suplai tegangan yang searah pada kumparan jangkar dan kumparan medan untuk diubah menjadi energi mekanik [11]. Motor DC brush memiliki kemampuan torsi awal yang tinggi dengan kuat medan magnet yang besar akan mempengaruhi kecepatan motor. Motor DC dapat digunakan untuk sistem kendali robot manual pembawa AV-Com [12].
E. Sensor Gerak (Optocoupler)
Sensor gerak digunakan untuk mengisolasi rangkaian input dengan rangkaian output. Suplai tegangan untuk masing-masing rangkaian tidak saling terbebani dan juga untuk mencegah kerusakan pada rangkaian kontrol input.
Prinsip kerja adalah ketika ada benda yang berada di antara celah sensornya, maka cahaya yang dikirimkan tidak bisa diterima oleh bagian penerimanya, sehingga dihasilkan tegangan keluaran yang nilainya mendekati
5 Volt. Jika tidak ada benda diantara celah sensornya maka akan akan menghasilkan tegangan keluaran yang nilainya mendekati 0 Volt [13]. Sensor gerak yang digunakan adalah optocoupler dapat ditunjukkan pada Gambar 9.
Gambar 9. Foto sensor gerak (Optocoupler) [13].
Sensor gerak merupakan gabungan dari LED infra merah dengan
fototransistor yang terbungkus menjadi satu chips. Cahaya infra merah
termasuk dalam gelombang elektromagnetik yang tidak tampak oleh mata telanjang. Sinar ini tidak tampak oleh mata karena mempunyai panjang gelombang berkas cahaya yang terlalu panjang bagi tanggapan mata manusia. Sinar infra merah mempunyai daerah frekuensi 1 x 1012 GHz sampai dengan 1 x 1014 GHz atau daerah frekuensi dengan panjang gelombang 1µm – 1mm [13]. Skema sensor gerakditunjukkan pada Gambar 10.
Prinsip kerja dari rangkaian optocoupler adalah :
1. Jika S1 terbuka maka LED akan mati, sehingga phototransistor tidak akan bekerja.
2. Jika S1 tertutup maka LED akan memancarkan cahaya, sehingga
phototransistor akan bekerja.
3. Jika antara phototransistor dan LED terhalang maka phototransistor tersebut akan off sehingga output dari kolektor akan berlogika high.
4. Sebaliknya jika antara phototransistor dan LED tidak terhalang maka
phototransistor dan LED tidak terhalang maka phototransistor tersebut
akan on sehingga output-nya akan berlogika low [13].
F. Light Emiting Diode (LED)
Lampu LED adalah suatu lampu indikator dalam perangkat elektronika yang biasanya memiliki fungsi untuk menunjukkan status dari perangkat elektronika tersebut. Lampu LED terbuat dari plastik dan dioda semikonduktor yang dapat menyala apabila dialiri tegangan listrik rendah (± 1.5 volt DC). Lampu LED merupakan lampu terbaru yang merupakan sumber cahaya yang efisien energinya. Lampu LED ketika memancarkan cahaya nampak pada gelombang spektrum yang sangat sempit, mereka dapat memperlakuan “cahaya putih”[15]. LED ditunjukkan pada Gambar 11.
Gambar 11. LED dan LED Flexibel [16].
Lampu LED sangat dibutuhkan dalam penelitian ini karena lampu LED memiliki spectrum warna warna indah untuk sebagai daya tarik hama wereng
coklat untuk mendekat. Beberapa warna lampu LED memiliki tingkatan intensitas cahaya yang berbeda tergantung warna yang dihasilkan lampu LED tersebut. Berikut ini daftar spectrum warna LED, panjang gelombang LED dan Material Semikonduktor LED. Warna LED dan panjang gelombang LED dapat ditunjukkan pada Tabel 2.
Tabel 2.Warna dan panjang gelombang LED [20]
Contoh salah satu pemanfaatan LED yaitu penyinaran lampu LED warna biru (430 ± 4) nm dan merah (629 ± 6) nm sebagai inaktivasi staphylococcus
aureus dan vibrio cholerae dengan endogen photosensitizer [24].
G. Sumber Daya Aki (Accu)
Aki kering merupakan bentuk pengembangan dari aki basah yang sudah lama dikenal konsumen. Perbedaan fisik yang langsung terlihat adalah pada warna wadah yang gelap/tidak transparan dan tidak adanya
lubang-Warna Panjang
Gelombang [Nm] Material Semikonduktor
Merah 610 < X < 760
Aluminium Gallium Arsenide Gallium Arsenide Phosphide
Aluminium Gallium Indium Phosphide Gallium(III) Phosphide
Kuning 570 < X < 590
Gallium Arsenide Phosphide
Aluminium Gallium Indium Phosphide Gallium(III) Phosphide
Hijau 500 < X < 570
Indium Gallium Nitride Gallium(III) Nitride Gallium(III) Phosphide
Aluminium Gallium Indium Phosphide Aluminium Gallium Phosphide
Biru 450 < X < 500
Zinc Selenide
Indium Gallium Nitride
Putih Broad Spectrum
lubang untuk mengisi air aki. Cairan berbentuk gel digunakan sebagai pengganti cairan elektrolit. Gel ini sangat minim tingkat penguapannya dan pada saat penguapan pun, uap tersebut tidak dibuang keluar wadah, tetapi masuk lagi ke dalam wadah (Maintenance Free) [15]. Sumber daya aki dapat ditunjukkan pada Gambar 12.
Gambar 12. Aki Kering
Aki basah jika dibawa kemungkinan besar terjadi goncangan sehingga dikhawatirkan air akan tumpah dalam box tas. Aki kering lebih mudah digunakan tidak perlu mengganti electrolit serta aki kering apabila dibawa kemana-mana sangat aman terhadap goncangan. Rancang bangun alat penangkap hama wereng ini menggunakan aki kering sebesar 12V/7.2A.
H. Perangkat lunak
Bahasa pemrograman yang digunakan adalah bahasa BASIC. BASIC adalah singkatan dari Beginners’ All-purpose Symbolic Instruction Code adalah sebuah kelompok bahasa pemrograman tingkat tinggi. Secara harfiah, BASIC memiliki arti “kode - kode instruksi simbolis semua tujuan yang dapat digunakan oleh para pemula”. Istilah “Bahasa BASIC” dapat diartikan menjadi bahasa untuk pemula, atau dengan kata lain disebut sebagai bahasa dasar, tetapi hal tersebut dirasa kurang tepat mengingat BASIC dapat juga digunakan oleh para pemrogram ahli. Program bahasa BASIC dituliskan dalam perangkat lunakBasic Compiler yang kemudian didownload ke mikrokontroler ATmega 16. Proses download program ke IC mikrokontroler
AVR dapat menggunakan sistem download ISP (In- System Programming).
In- System Programmable Flash on Chip mengizinkan memori untuk dapat
diprogram ulang dalam sistem menggunakan hubungan serial SPI.
Prinsip – prinsip yang digunakan dalam mendesain bahasa BASIC adalah sebagai berikut :
1. Dapat digunakan secara mudah bagi para pemula.
2. Dapat digunakan sebagai sebuah bahasa pemrograman untuk tujuan umum (general purpose).
3. Dapat ditambahi fitur – fitur tambahan dan tingkat lanjut untuk para ahli, tetapi tetap mempertahankan kesederhanaan bahasa untuk para pemula.
4. Pesan – pesan kesalahan harus jelas dan mudah dipahami. 5. Merespon dengan cepat untuk program –program yang kecil.
6. Tidak harus membutuhkan pengetahuan dan pemahaman perangkat keras computer.
7. Pengguna juga tidak harus tahu mengenai sistem operasi komputer.
BASCOM AVR merupakan compiler bahasa BASIC untuk AVR. BASCOM AVR ini dapat mengimplementasi hampir semua instruksi bahasa BASIC yang sesuai dengan arsitektur AVR. Dengan menggunakan BASCOM AVR, pembuatan program mikrokontroler menjadi semakin mudah karena bahasa BASIC yang sangat mudah dipahami dan sudah banyak mikrokontroler yang mendukung dengan pemrograman BASCOM AVR.
I. Metode Statistik
Analisis hasil rekapitulasi rata-rata jumlah hama wereng yang tertarik dan tertangkap pada alat penangkap hama wereng. Data dikumpulkan kemudian dianalisis. Analisis pertama menggunakan rata-rata setiap uji warna lampu. Uji ANOVA. Pengujian menggunakan uji anova yang berarti menguji analisis variannya, yang menunjukan bahwa data tersebut memiliki perbedaan yang nyata variannya [28].
Nilai hasil pengamatan suatu pengujian digambarkan dalam persamaan matematika (1) [26].
Y =µ + π + ع...(1) Keterangan:
Y = Nilai-nilai pengamatan hasil pengujian µ = nilai rerata (mean) harapan
π = pengaruh faktor perlakuan
ع=pengaruh galat (experimental error)
Hasil pengujian suatu perlakuan terhadap hasil disajikan pada Tabel 3.
Tabel 3. Analisi data pengaruh perlakuan. Perlakuan
(H)
Ulangan (U) Jumlah
(TA) Rerata (yA) 1 2 i…….r A0 Y10 Y20 Yi0…Yr0 TA0 ŸA0 A1 Y11 Y21 Yi1…Yr1 TA1 ŸA1 A2 Y12 Y22 Yi2…Yr2 TA2 ŸA2 . . . . . . . . . .
Aj Y1j Y2j Yij…Yrj TAj ŸAi
At Y1t Y2t Yit…Yrt TAt ŸAt
1. Faktor koreksi (FK) = nilai untuk mengoreksi nilai rerata (µ) dari ragam data (ß) sehingga dalam analisis sidik ragam nilai µ=0. 2. JKTotal = T(Yij2)-FK
= (Y102 + Y112 + ….+Yij2 + ….Yn2) – FK
3. JK Perlakuan = – FK
JK ini berturut-turut mencerminkan pengaruh rerata kuadrat dari masing-masing parameter, µ, Y, ß, dan € dalam model matematika Rancang Acak Lengkap (RAL).
Dari persamaan (1) diketahui bahwa hasil pengujian terdiri dari nilai rata-rata, ditata dalam suatu tabel analisis data dapat dihitung nilai Tijkuadarat (sum of square) yang disingkat JK. Rumus umum JK adalah:
Analisis sidik ragam (Ansira) atau analisis varian merupakan suatu uji yang dilakukan menurut distribusi F, sehingga ansira ini disebut juga sebagai uji F. Ansira ini dimaksudkan untuk menguji hipotesis tentang pengaruh faktor perlakuan terhadap keragaman data hasil pengujian. Model uji umum bagi uji F ini adalah:
H0:FHitung< Fα(V1,V2)
H1 : FHitung> Fα(V1,V2)
Dengan kaidah keputusan jika: α = 5%
V = db = Derajat kebebasan V1 = db1
V2 = db2
= Nilai F dari F tabel pada derajat bebas V1 (perlakuan) dan V2 (galat) dengan taraf uji sebesar (biasanya 5 dan 1%).
Untuk memudahkan pengujian, maka ansira (uji F) ini dilakukan dalam suatu daftar suatu ansira ditunjukkan Tabel 4.
Tabel 4. Daftar ansira pengaruh perlakuan menurut RAL Sumber
Keragaman
Derajat Bebas Jumlah kuadrat Kuadrat tengah F Hitung F Tabel Perlakuan h-1=V JKH JKH/V KTH/KTG F(V1,V2) Galat (rh-1)-(h-1)=V2 JKG JKG/V21 Total rh-1 JKT
Dengan kaidah keputusan jika: KTp=
KTg = V1 = h-1
V2 = (rh-1)-(h-1)
Hasil uji F ini menunjukan derajat pengaruh perlakuan (dalam hal ini adalah perlakuan) terhadap data hasil pengujian sebagai berikut: 1. Perlakuan berpengaruh nyata jika H1 diterima pada taraf uji 5%.
2. Perlakuan berpengaruh tidak nyata jika H0 diterima pada taraf uji 5%.
Koefisien keragaman merupakan suatu koefisien yang menunjukan derajat ketepatan/kejituan (precision atau accuracy) dan keandalan kesimpulan / hasil yang diperoleh dari suatu pengujian yang merupakan deviasi baku per unit pengujian. Koefisien keragaman ini dinyatakan sebagai persen rerata dari umum pengujian sebagai berikut:
KK
BAB III
METODE PENELITIAN
A. Waktu dan Tempat Penelitian
Waktu penelitian dilakukan pada bulan Juli – Desember 2013. Tempat penelitian di laboratorium digital Teknik Elektro Universitas Dian Nuswantoro Semarang, dan uji coba alat di sawah milik petani di Dusun Mundingan Kelurahan Cepoko Kecamatan Gunungpati Semarang.
B. Jenis Penelitian
Jenis penelitian pada tugas akhir ini adalah membuat alat penangkap hama wereng berdasarkan warna cahaya LEDdan menguji coba alatdi lapangan.
C. Objek Penelitian
Objek penelitian terdiri dari:
1. Membuat alat penangkap hama wereng secara mekanik dengan menggunakan warna cahaya LED.
2. Menguji pengaruh warna cahaya lampu LED terhadap ketertarikan hama wereng.
D. Bahan dan Alat 1. Bahan
Bahan yang digunakan dalam penelitian ini yaitu: sistem mikrokontroler AT-Mega 16, rangkaian sensor gerak, motor DC brush, rangkaian driver motor DC, saklar on/off, rangkaian regulator, Catu daya sebesar 12 VDC/ 7.2 A, 5 warna lampu LED, corong Ø2” inchi, Pralon 2 meter Ø 1” inchi, dan 2 pasang pralon sok drat Ø 1” inchi.
2. Alat
Alat yang digunakan dalam penelitian ini yaitu: Multitester, Toolset, Gergaji pralon, Tang potong kabel, komputer bersistem operasi windows
XP, kabel downloader, kabel serial port, dan Perangkat lunak BASCOM AVR
E. Tahapan Penelitian
Tahapan penelitian yang dilaksanakan, ditunjukkan Gambar 13.
Gambar 13. Blok alur tahapan penelitian
1. Analisis Kebutuhan
Analisis kebutuhan perangkat keras meliputi analisis system minimum mikrokontroler AT-Mega 16, Sensor gerak, Lampu LED, Driver Motor H-Bridge 30A, Motor DC, dan Aki. Analisis perangkat lunak ditapkan menggunakan Bascom AVR sebagai bahasa pemrograman dasar.
2. Perencanaan Desain Alat
Pada penelitian ini dirancang bangun alat penangkap hama wereng. Alat memerlukan beberapa komponen perangkat keras. Desain alat penangkap wereng dapat ditunjukkan pada Gambar 14.
2. Perancangan desaian alat
4. Uji Coba Alat 3. Pembuatan Alat
5. Pengumpulan Data 1. Analisis Kebutuhan
A. B. C. D. E. F. G. H.
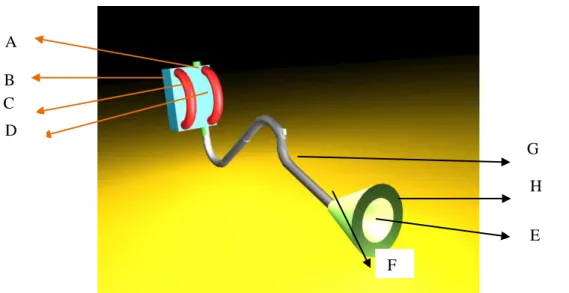
Gambar 14. Alat penangkap wereng tampak depan Keterangan:
A. Lubang angin keluar
B. Tas punggung / box alat penangkap hama wereng C. Tali punggung untuk membawa tas
D. Busa untuk tatakan punggung agar nyaman di pakai E. Sensor gerak (optocoupler)
F. Lampu LED berwarna G. Pipa pralon panjang 1 meter H. Bibir corong diameter 2 inchi
Uraian Lengkap Rancangan tiga Dimensi
Mengacu pada Gambar 14, yang memperlihatkan suatu alat penangkap hama wereng berdasarkan pengaruh warna cahaya LED tampak depan. Corong penyedot berbentuk kerucut dengan lampu dipasang dibagian dalam mengelilingi corong (G). Wereng tersedot masuk ke dalam kotak penampung hama (B) melalui pipa paralon (E) sesaat setelah sensor gerak (F) memberikan sinyal dan mengaktifkan mikrokontroler yang berada satu kotak dengan kotak penampung hama (B). Penambahan 2 (dua) buah tali pengikat (C) pada kotak penampung hama (B) dimaksukan untuk mempermudah mobilitas alat dan memungkinkan dapat dipakai di punggung petani. Untuk menghindari A B C D G H E F
keluarnya hama wereng dari dalam kotak penampung, maka pipa paralon (E) dibuat menyerupai leher angsa dan ditambahkan katup penutup (D) pada pipa paralon (E). Desain rancangan corong alat penangkap wereng dapat ditunjukkan pada Gambar 15.
Gambar 15. Rancangan corong desain alat pengendali hama wereng Uraian Lengkap Rancangan 2 Dimensi
Mengacu pada gambar 15 desaian awal rancangan alat pengendali hama wereng. Merupakan gambar rangkaian (perangkat keras) yang digunakan pada corong alat pengendali hama wereng ini meliputi 3 buah sensor gerak, dan lampu LED berwarna (Merah, Hijau, Kuning, Biru, dan Putih) 12Volt.
a. Perangkat keras
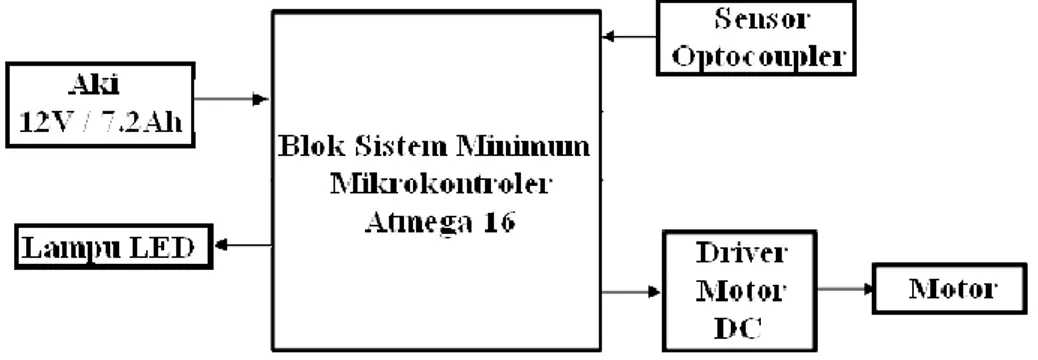
Alat penangkap hama wereng berdasarkan warna cahaya LED terdiri dari tiga yaitu Input, proses, dan output. Diagram blok sistem perangkat penangkap wereng dapat ditunjukkan pada Gambar 16.
Sistem ini menggunakan mikrokontroler sebagai pengendali. Mikrokontroler yang digunakan adalah ATmega 16, serta sensor gerak sebanyak 3 buah yang digunakan sebagai input di mana parameter input ini adalah wereng yang tertarik masuk serta terdeteksi yang akan diproses oleh mikrokontroler. Aki 12Volt /7,2 Amper digunakan sebagai sumber daya. Lampu LED 12Volt digunakan sebagai penarik hama wereng terhadap cahaya dan driver motor DC digunakan sebagai penggerak motor DC sebagai penyedot hama wereng masuk.
1) Sistem Minimum Mikrokontroler ATmega 16
Mikrokontroler berfungsi sebagai otak atau pengendali utama yang akan mengolah data darisensor dengan instruksi – instruksi yang telah diprogram. Mikrokontroler yang digunakan yaitu Mikrokontroler AVR ATmega 16 yang merupakan mikrokomputer CMOS dengan 16 KB Flash PEROM (Programmable and Erasable Only Memory).
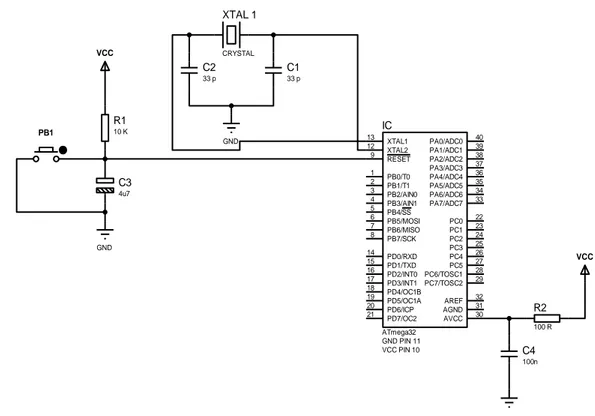
Sistem minimum mikrokontoler dapat dihubungkan dengan rangkaian lain untuk menjalankan fungsi tertentu. Suatu sistem minimum terdiri dari IC ATmega 16 memori penyimpan program, 1 buah Kristal, 1 buah tombol reset yang berfungsi mereset dari awal. Sistem minimum mikrokontroler ATmega 16 ditunjukkan pada Gambar 17.
Pada rangkaian sistem minimum di atas, kaki 9 pada mikrokontroler terhubung ke rangkaian reset. Kaki 9 dan 12 mikrokontroler terhubung dengan XTAL. Crystal yang digunakan adalah 12 MHz atau 11.0592 MHz. Sedangkan untuk kaki 11 terhubung dengan GND / (ground) dan kaki 10 terhubung dengan VCC.
RESET 9 PD1/TXD 15 XTAL2 12 XTAL1 13 PD2/INT0 16 PD3/INT1 17 PD4/OC1B 18 PD5/OC1A 19 PD0/RXD 14 PD6/ICP 20 PA1/ADC1 39 PA2/ADC2 38 PA3/ADC3 37 PA4/ADC4 36 PA5/ADC5 35 PA0/ADC0 40 PD7/OC2 21 PC0 22 PC1 23 PC2 24 PC3 25 PC4 26 PC5 27 PB0/T0 1 PB1/T1 2 PB2/AIN0 3 PB4/SS 5 PB5/MOSI 6 PB6/MISO 7 PB7/SCK 8 PB3/AIN1 4 PA6/ADC6 34 PA7/ADC7 33 PC6/TOSC1 28 PC7/TOSC2 29 AVCC 30 AREF 32 AGND 31 IC ATmega32 GND PIN 11 VCC PIN 10 GND GND XTAL 1 CRYSTAL C1 33 p C2 33 p C3 4u7 R1 10 K R2 100 R C4 100n PB1 VCC VCC
Gambar 17. Sistem Minimum Mikrokontroler ATmega 16
2) Lampu LED
LED memerlukan sumber tegangan sebesar 3 Volt dan Arus 40 mAh per mata LED, dibutuhkan 27 buah LED yang memiliki 3 mata per lampu LEDnya. Total jumlah LED ada 3 mata x 27 buah = 81 mata LED yang diseri untuk mendapatkan tegangan 12V / 20 mAh. Dari 81 mata LED tersebut dibuat rangkaian parallel dengan 3 seri x 27 paralel, sehingga arus yang dihasilkan 40 mAh x (3 x 27) = 32,4 mAh. Lampu LED 1 unit yang dirangkai seri dan parallel berjumlah 81 mata LED membutuhkan daya 12V / 32,4 mAh. Alat penangkap yang berbentuk corong dilengkapi dengan lampu LED yang berbeda-beda warna lampunya diteliti daya tariknya terhadap jumlah wereng yang tertangkap.
3) Sensor gerak
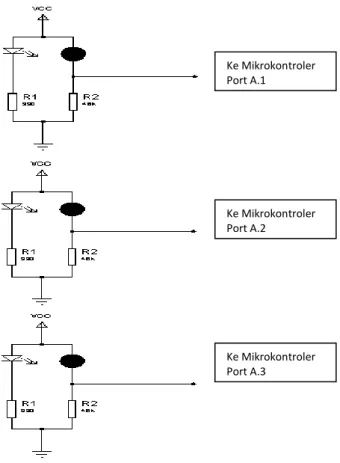
Penelitian ini menggunakan 3 buah pasang sensor gerak. Sensor gerak terdiri dari sebuah LED dan sebuah photodiode yang digunakan sebanyak 3 pasang, yang terdiri dari sebuah LED, sebuah photodiode untuk tiap pasang
sensor, R1 hambatan 220 Ohm, dan R2 hambatan 1 kilo Ohm. Sensor tersebut akan menghasilkan output berupa beda potensial yang dihubungkan pada PORT A.1 , A.2, dan A.3 pada sistem minimum mikrokontroler ATmega 16. Rangkaian sensor gerak dapat ditunjukkan pada Gambar 18.
Gambar 18. Rangkaian skematik sensor gerak
Alat penangkap ini juga dilengkapi sensor yang nantinya diproses oleh mikrokontroler yang berhubungan langsung dengan mekanik vacuum berisi motor 12 volt dan baling-baling kipas aluminium [17]. Mekanik tersebut dihubungkan dengan pipa paralon yang ujungnya diberi corong penyedot. Pada corong penyedot dipasang lampu dengan warna merah, hijau, kuning, putih, dan biru memutar searah dengan bentuk corong. Pada ujung corong penyedot dipasang sensor gerak yang berfungsi untuk mendeteksi keberadaan/gerakan hama wereng coklat. Dengan menekan tombol on pada
Ke Mikrokontroler Port A.1 Ke Mikrokontroler Port A.2 Ke Mikrokontroler Port A.3
switch kabel, maka lampu akan menyala dan menarik hama wereng coklat. Apabila ada wereng yang mendekat pada lampu, maka sensor gerak akan memberikan sinyal yang akan diproses oleh mikrokontroler sehingga secara otomatis motor akan memutar mekanik baling-baling kipas dan menyedot udara dari luar masuk ke dalam kotak penampung hama.
4) Driver Motor
Driver motor DC digunakan untuk menggerakkan motor DC. Masukan dari
rangkaian driver ini terdiri dari logika high atau low yang berasal dai system minimum mikrokontroler untuk mengatur putaran motor. Pada inputan
enable diberi input high untuk berputar dan low untuk stop. Gambar
rangkaian driver motor DC dapat ditunjukkan pada Gambar 19.
Gambar 19. Rangkaian Skematik Driver Motor H.Bridge 30A
Pengujian driver motor H-Bridge dilakukan dengan cara pertama hubungkan sumber catu daya untuk input (VCC) dan catu daya untuk beban (VMot). Kemudian berikan sebuah inputan logika (+5V) dan inputan logika (0V) pada pin (MIN1, MEN1, dan MPWM). Maka pada MOUT1 akan menghasilkan tegangan untuk memutarkan motor DC.
Driver motor tipe EMS 30 A H-Bridge masing-masing dapat mengantarkan arus hingga 30A dan mendukung tegangan beban dari 5,5 V sampai 36 V (IC VNH2SP30 hanya sampai 16V). Driver motor ini dapat memicu motor DC brush yang memiliki kemampuan torsi awal yang tinggi dengan kuat medan magnet yang besar. Driver motor akan mempengaruhi kecepatan motor, sehingga diperlukan kecepatan putaran yang cepat untuk memutarkan motor DC guna untuk saat penyedotan.
5) Motor DC
Motor digunakan untuk memutar baling baling, berfungsi sebagai penyedot. Motor memerlukan sumber tegangan sebesar 12Volt dan Arus 2500mA.
6) Aki12V
Aki digunakan sebagai sumber energi pemutar pada motor DC. Aki yang digunakan pada alat penangkap wereng ini menggunakan aki kering. Aki kering lebih mudah digunakan tidak perlu mengganti electrolit serta aki kering apabila di bawa kemana-mana sangat aman terhadap goncangan. Sehingga rancang bangun alat penangkap hama wereng ini menggunakan aki kering sebesar 12V/7.2AH.
7) Rangkaian Catu Daya 5 Volt
Pada Tugas Akhir ini menggunakan catu daya sebesar +5 Volt untuk mencatu system minimum mikrokontroler, driver motor DC dan sensor gerak. Untuk menghasilkan tegangan +5 Volt dibutuhkan IC regulator 7805 yang berfungsi sebagai penyetabil tegangan. Rangkaian Driver Motor DC dapat ditunjukkan pada Gambar 20.
Gambar 20. Rangkaian Catu Daya (+5V)
8) Kebutuhan daya pada alat
Perhitungan lama waktu aki dapat bertahan berapa lama. Lama aki = I accu / (I LED + IMotor DC) Lama waktu = 7200mAH / (32,4 mA + 2500mA)
=7200mAH / 2532,4 mA = 2,8H
b. Perangkat lunak
BASCOM AVR merupakan compiler bahasa BASIC untuk AVR. BASCOM AVR ini dapat mengimplementasi hampir semua instruksi bahasa BASIC yang sesuai dengan arsitektur AVR. Pada penelitian ini menggunakan program bascom avr.
3. Pembuatan Alat a. Perangkat keras
Konsep perencanaan perangkat keras alat penangkap hama wereng coklat dengan baling-baling mekanik dan corong penyedot meliputi beberapa komponen yang akan digunakan diantaranya adalah sebagai berikut:
1) Sistem Minimum Mikrokontroler AT-Mega 16
Pada sistem ini mikrokontroler yang digunakan adalah mikrokontroler AT-Mega 16. Untuk beroperasinya IC mikrokontroler maka diperlukan sebuah sistem minimum. Sistem minimum ini
kemudian bisa dihubungkan dengan rangkaian lain untuk menjalankan fungsi tertentu. Suatu sistem minimum bisa saja ditambahkan dengan rangkaian pelengkap lainnya sehingga menjadi suatu sistem yang lebih lengkap dan memiliki fungsi lebih banyak. Hasil sistem minimum mikrokontrolerAT-Mega 16 yang telah dibuat dapat ditunjukkan pada Gambar 21.
Gambar 21. Foto sistem minimum mikrokontroler AT-Mega 16
2) Sensor gerak
Optocoupler adalah suatu piranti yang terdiri dari 2 bagian yaitu transmitter dan receiver, yaitu antara bagian cahaya dengan bagian deteksi sumber cahaya terpisah. Optocoupler biasanya digunakan sebagai saklar elektrik, yang bekerja secara otomatis. Hasil sensor gerak yang telah dibuat dapat ditunjukkan pada Gambar 22.
3) Driver Motor DC
Driver motorDC digunakan untuk menguatkan arus dari mikrokontroler
untuk menggerakkan motor DC. Driver motor DC ini menggunakan EMS H-Bridge 30A. Hasil driver motor EMS H-Bridge 30A yang telah dibuat dapat ditunjukkan pada Gambar 23.
Gambar 23. Foto driver motor EMS H-Bridge 30A
4) Rangkaian Catu Daya
Catu daya DC digunakan untuk mencatu rangkaian – rangkaian yang membentuk perangkat keras. Pada Tugas Akhir ini menggunakan catu daya sebesar +5 Volt untuk mencatu modul mikrokontroler, motor DC dan sensor gerak. Untuk menghasilkan tegangan +5 Volt dibutuhkan IC regulator 7805 yang sudah dilengkapi dengan pembatas arus (current
limitter) dan pembatas suhu (thermal limiter). Hasil catu daya 5 volt
yang telah dibuat dapat ditunjukkan pada Gambar 24.
b. Perangkat lunak
Pada penelitian ini bahasa pemrograman yang digunakan adalah bahasa BASIC. Program bahasa BASIC dituliskan dalam perangkat
lunak Basic Compiler yang kemudian di download ke mikrokontroler
AT-Mega 16. Proses download program ke IC mikrokontroler AVR dapat menggunakan sistem download ISP (In- System Programming).
In- System Programmable Flash on Chip mengizinkan memori untuk
dapat diprogram ulang dalam sistem menggunakan hubungan serial SPI.
4. Uji Coba Alat
Alat di buat di laboratorium UDINUS, setelah alat jadi dilakukan uji coba alat yang tujuanya untuk mengetahui apakah alat dapat berfungsi dengan baik. Pengujian alat dilakukan di laboratorium dan di lapangan.
a. Uji Coba Alat di Laboratorium
Uji coba alat dilakukan alat diuji di laboratorium dengan cara menguji perangkat keras di laboratorium UDINUS. Rangkaian system minimum mikrokontroler AT-Mega 16 dapat memproses input dan menghasilkan output. Sensor gerak di uji dengan diberi inputan gerakan dan jika terpicu suatu gerakan maka akan menghasilkan beda potensial tegangan. Lampu LED di uji dengan menghubungkan dengan aki sehingga lampu LED dapat menyala. Rangkaian driver motor DC di beri inputan dari output system mikrokontroler sehingga output driver motor dapat memutarkan motor DC. Motor DC di uji dengan menghubungkan dengan aki sehingga motor DC dapat berputar, dan aki di uji dengan cara mengukur tegangan dan arus yang tersimpan dalam aki.
b. Uji Coba Alat di Lapangan atau Sawah
Setelah alat teruji dengan baik di laboratorium selanjutnya alat dilakukan pengujian dilapangan atau sawah. Alat di uji pengaruh variasi
warna lampu LED berwarna (Merah, Putih, Hijau, Kuning dan Biru) untuk mengetahui terhadap ketertarikan hama wereng. Pengujian dilakukan pada sawah yang ditanami padi yang terserang wereng pada saat petang (18.00-19.00).
Pengujian dilakukan pada sawah dengan luas yang akan diuji (2 meter x 2 meter) untuk tiap warna lampu LED. Pada saat pengujian alat diberi waktu selama 10 menit untuk setiap warna lampu. Setiap satu seri pengujian yang terdiri 5 jenis warna lampu yaitu merah, hijau, kuning, biru, dan putih. Perlakuan diulang sebanyak 5 kali. Selama pengujian per uji coba di beri jarak per hari dan tempat sawah selalu berbeda tempat. Berikut ini adalah tabel jadwal uji coba alat di sawah, dapat ditunjukkan pada Tabel 5.
Tabel 5. Pengamatan dan Pengujian No Warna Uji coba ke-
1 2 3 4 5 1 Merah A E D C B 2 Kuning B A E D C 3 Putih C B A E D 4 Hijau D C B A E 5 Biru E D C B A Keterangan :
Waktu uji coba alat dengan warna lampu LED A = Jam 18.00 – 18.10
B = Jam 18.10 – 18.20 C = Jam 18.30 – 18.40 D = Jam 18.40 – 18.50 E = Jam 18.50 – 19.00
5. Rancangan Statistik
Setelah data diuji menggunakan anova, makaanalisis data dibedakan menurut hasil dari FHitung dan FTabel untuk melihat ada tidaknya
perbedaan. Data dianalisis dengan langkah – langkah sebagai berikut: 1. Merumuskan Hipotesa bahwa:
H0: FHitung< Fα(V1,V2) => Tidak ada beda yang nyata antar warna
lampu.
H1 : FHitung> Fα(V1,V2) => Ada beda yang nyata antar warna
lampu. 2. Membuat Tabel Anova
Sumber Keragaman
Derajat Bebas Jumlah kuadrat Kuadrat tengah F Hitung F Tabel Perlakuan h-1=V JKH JKH/V KTH/KTG F(VP V2) Galat (rh-1)-(h-1)=V2 JKG JKG/V21 Total rh-1 JKT
3. Membandingkan nilai FHitung dengan FTabel
4. Menarik kesimpulan
6. Pengumpulan Data dan Analisis Data yang dikumpulkan antara lain:
a. Di laboratorium: kelayakan masing-masing komponen alat, yaitu: motor DC dapat berputar dan dapat menyedot, sensor dapat berfungsi dengan baik, lampu LED dapat menyala, AT-Mega 16 dapat mengontrol semua inputan atau output, dan driver motor dapat mengontrol kecepatan motor DC.
b. Dilapangan atau sawah: Data jumlah wereng yang tertangkap berdasarkan jenis warna lampu LED. Serta data jumlah pengulangan selama lima kali perlakuan. Perlakuan yang diujikan pada hama wereng yaitu lima jenis warna lampu yang berbeda Merah, Hijau, Kuning, Biru dan Putih.
BAB IV
HASIL DAN PEMBAHASAN
A. Hasil Uji Coba Alat Di Laboratorium
Alat penangkap hama wereng telah selesai dibuat di laboratorium UDINUS, setelah alat jadi dilakukan uji coba alat yang tujuanya untuk mengetahui apakah alat dapat berfungsi dengan baik.
1. Pengujian Rangkaian Sistem Minimum Mikrokontroler
Pengujian sistem minimum mikrokontroler dilakukan untuk mengetahui apakah mikrokontroler dapat bekerja sesuai dengan fungsi semestinya. Pengujian dilakukan dengan menjalankan program yang akan membuat LED nyala secara bergantian. Setiap port dihubungkan dengan LED untuk mengetahui apakah masing-masing kaki berfungsi dengan baik. Pada CodeWizartAVR dilakukan pengaturan Port A, Port B, Port C, dan Port D sebagai output. Kemudian pada CodeVisionAVR dituliskan program sebagai berikut :
$regfile = "m32def.dat" $crystal = 11059200 Config Portc = Output Portc = &B1111_1110 Do
Rotate Portc , Right , 1 Waitms 500
Loop End
Hasil pengujian masing-masing kaki port mikrokontroler ATmega 16 dengan mengukur tegangan output masing-masing kakinya selama 10 kali pengujian dapat ditunjukkan pada Tabel 6.
Berdasarkan Tabel 6, diperoleh hasil bahwa pengujian masing – masing kaki pada port mikrokontroler berhasil. Kaki mikrokontroller dapat digunakan sebagai input output, atau penghubung alat lainnya. Untuk
logika “1” tegangannya berkisar antara 3,9 V – 4,9 V dan logika “0” tegangannya berkisar antara 0 V – 1,2 V.
Tabel 6. Hasil Pengujian Sistem Minimum ATmega 16
PORT .0 .1 .2 .3 .4 .5 .6 .7
A 4.8 V 4.8 V 4.8 V 4,9 V 4,7 V 4,8 V 4,9 V 4,7 V B 4.8 V 4.8 V 4.8 V 4,9 V 4,7 V 4,8 V 4,9 V 4,7 V C 4.8 V 4.8 V 4.8 V 4,6 V 4,8 V 4, V 4,9 V 4,7 V D 4.8 V 4.7 V 4.8 V 4,9 V 4,7 V 4,8 V 4,9 V 4,7 V
2. Pengujian Rangkaian Catu Daya
Pengujian catu daya bertujuan untuk mengetahui tegangan pada keluaran IC LM 7805. Langkah-langkah pengujian pada catu daya adalah sebagai berikut:
1. Memutuskan jalur keluaran yang menuju rangkaian aplikasi dan sistem mikrokontroler.
2. Menghidupkan catu daya.
3. Mengukur tegangan pada titik titik yang telah ditentukan.
Alur pengujian rangkaian catu daya 5 volt dapat ditunjukkan pada Gambar 25. Hasil pengujian catu daya dapat ditunjukkan pada Tabel 7.
Gambar 25. Diagram alur pengujian catu daya 5 volt.
Berdasarkan hasil pengujian didapatkan hasil bahwa pengukuran IC LM 7805 sebesar 4,98 Volt. Tegangan tersebut masih bisa digunakan untuk mencatu daya rangkaian Sistem Minimum Mikrokontroler AT-Mega 16, Sensor gerak, dan Driver motor DC.
Tabel 7. Pengujian Rangkaian Catu Daya
Uji coba ke Input Output
1 9 Volt 4,98 Volt 2 9 Volt 4,97 Volt 3 9 Volt 4,98 Volt 4 9 Volt 4,97 Volt 5 9 Volt 4,98 Volt 6 9 Volt 4,98 Volt 7 9 Volt 4,97 Volt 8 9 Volt 4,98 Volt 9 9 Volt 4,98 Volt 10 9 Volt 4,97 Volt
Rata-rata 9 Volt 4,98 Volt
3. Pengujian Rangkaian Sensor gerak
Pengujian rangkaian sensor gerak ini dilakukan untuk mengetahui kondisi tegangan rangkaian sensor saat mendeteksi garis pada lintasan. Hasil pengujian rangkaian sensor gerak dapat ditunjukkan pada Tabel 8.
Tabel 8. Hasil pengujian rangkaian sensor gerak No Parameter Rangkaian Optocoupler Tegangan Terukur Tidak mendeteksi penghalang Mendeteksi penghalang 1. V out Optocoupler 1 4,12 V 0,12 V 2. V out Optocoupler 2 4,14 V 0,15 V 3. V out Optocoupler 3 4,11 V 0,13 V V rata – rata 4,12 V 0,13 V
Tabel 8 pengujian rangkaian sensor gerak di atas, didapat bahwa rata – rata tegangan keluaran optocoupler saat sensor tidak mendeteksi benda bergerak adalah 4,12 V, sedangkan pada saat mendeteksi benda bergerak tegangan keluaran rata-ratanya adalah 0,13 V.
4. Pengujian Driver Motor DC
Embedded Module Series (EMS) 30 A H-Bridge merupakan driver
H-Bridge berbasis VNH3SP30 yang didisain untuk menghasilkan drive 2 arah dengan arus kontinyu sampai dengan 30 A pada tegangan 5,5 Volt sampai 36 Volt (IC VNH2SP30 hanya sampai 16 V). Modul ini dilengkapi
dengan rangkaian sensor arus beban yang dapat digunakan sebagai umpan balik ke pengendali. Modul ini mampu men-drive beban-beban induktif seperti misalnya relay, solenoida, motor DC, motor stepper, dan berbagai macam beban lainnya. Input driver motor (input 1 dan 2) untuk menggerakkan motor DC 1 terhubung ke pin PD.1 dan PD.4 mikrokontroler.
Pengujian dilakukan dengan cara memberi inputan berupa logika “1” dan “0” pada masing-masing pin inputan secara bergantian kemudian melihat perubahan pada pergerakan motor yang terlebih dahulu sudah disambungkan pada pin-pin output dari driver. Pengujian rangkaian driver
motor DC H-BRIDGE 30A berhasil dilakukan dapat ditunjukkan pada
Tabel 9.
Tabel 9. Pengujian Driver MotorH-BRIDGE 30A Pada Motor DC
Disimpulkan bahwa rangkaian drive motor DC H-Bridge 30 A dapat berkerja dengan baik. Hal ini terbukti dapat memutarkan motor kekanan ataupun kekiri sesuai inputan yang di berikan.
5. Perangkat lunak
Perancangan desain perangkat lunak alat penangkap hama wereng menggunakan pemrograman basic compiller. Desain perancangan diagram blok dapat ditunjukkan Gambar 26.
Pin Enable MEN1
Pin Masukan
MIN1 Arah Putaran Motor
H Input 1 = 0
Input 2 = 1 Putar Kiri
H Input 1 = 1
Input 2 = 0 Putar Kanan
H Input 1 = 0
Input 2 = 0 Motor Tidak Berputar
H Input 1 = 1
Gambar 26. Flowchart Alat Penangkap Hama Wereng.
Keterangan flowchart alat pengendali hama wereng menggunakan algoritma:
a. Setelah power dinyalakan alat penyedot akan menyala hanya memutarkan motor DC 150 rpm. Motor dinyalakan terlebih dahulu berfungsi untuk menarik wereng masuk untuk mengenai sensor gerak. Apabila motor tidak dinyalakan terlebih dahulu, maka yang terjadi hama wereng hanya berkumpul di depan corong. Kemudian alat
corong diuji cobakan pada sawah serta corong didekatkan pada batang padi.
b. Mikrokontroler melakukan proses pembacaan benda bergerak berupa masukan dari sensor gerak dan melakukan pengecekan sensor mana yang mengenai terlebih dahulu. Berikut beberapa kondisi sensor membaca inputan:
1) Jika salah satu sensor terkenai ada pergerakan hama wereng yang melintasi sensor, maka akan memutarkan motor DC 190 rpm. 2) Jika kedua sensor terkenai ada pergerakan hama wereng yang
melintasi sensor, maka makin banyak wereng yang tertarik terhadap nyala warna lampu sehingga akan memutarkan motor DC 215 rpm.
3) Jika ketiga sensor terkenai ada pergerakan hama wereng yang melintasi sensor, maka makin lebih banyak wereng yang tertarik terhadap nyala warna lampu sehingga akan memutarkan motor DC 255 rpm.
6. Pengujian Alat Keseluruhan
Pengujian ini merupakan pengujian tahap akhir di mana semua bagian alat dihubungkan menjadi satu untuk kemudian diprogram dan dijalankan sebagai alat pengendali hama wereng yang memiliki kemampuan untuk menaikan RPM sehingga didapatkan putaran RPM yang sesuai untuk daya sedotan.
Sebelum dilakukan pengujian terhadap alat pengendali hama wereng yang menggunakan kertas yang dipilin memanjang sebagai rangsangan sensor apabila dimasuki benda. Sehingga sensor mendeteksi rangsangan maka akan menyalakan motor DC sesuai rpm. Kemudian kertas tersebut tersedot masuk kedalam tempat penampung.
B. Pengumpulan Data Hasil Pengujian di Lapangan
Setelah alat teruji dengan baik di laboratorium selanjutnya alat dilakukan pengujian dilapangan atau sawah. Data hasil uji coba alat penangkap hama wereng di lakukan di sawah di daerah Desa Mundingan, Kelurahan Cepoko, Kecamatan Gunungpati, Semarang di sawah milik bapak Lilik Sutresno. Padi yang diuji berumur 40 hari, dengan jenis varietas padi Ciliwong. Alat diuji pengaruh variasi warna lampu LED berwarna (Merah, Putih, Hijau, Kuning dan Biru) untuk mengetahui ketertarikan hama wereng.
Pengujian lokasi sawah diuji secara sampel acak. Setiap petak sawah dibagi 5 lokasi pengambilan sampel data penangkapan hama wereng. Setiap sisi ujung sawah dan pada tengah sawah. Masing-masing pengujian lampu warna Hijau, Kuning, Biru, Merah, dan Putih dengan luas 2m x 2m = 4m2. Pengambilan data di sawah dapat ditunjukkan pada peta dibawah ini.
Pengujian dilakukan pada sawah yang ditanami padi yang terserang wereng pada saat petang jam (18.00-19.00). Uji coba dilakukan sebanyak 5 kali pengulangan.
1. Mengukur Luasan Sawah
Lokasi pengujian sawah di Dusun Mundingan, Gunungpati. Ukuran sawah di ukur seluar 4m2 dapat ditunjukkan pada Gambar 27.
Gambar 27. Foto Sawah di Dusun Mundingan, Gunungpati
Sebelum alat diuji coba sawah dilihat populasi hama wereng, dengan cara melihat pada batang padi yang terserang wereng. Kemudian tanah sawah diukur 4m2 diberi kotak raffia bentuk persegi, ditunjukkan pada Gambar 28.
Peralatan alat penangkap hama wereng terdiri dari pipa pralon, sensor gerak, 5 buah lampu LED, gelas plastik yang dilumuri lem dapat ditunjukkan pada Gambar 29.
Gambar 29. Foto Peralatan Penangkap Hama Wereng
Foto sawah menjelang malam pukul 18.00, dengan ukuran rafia 4m2dapat ditunjukkan pada Gambar 30.
2. Hasil Uji Coba Alat Ulangan Pertama
Penguji alat penangkap wereng ulangan pertama pada tanggal 13 Oktober 2013 di sawah milik bapak Lilik dengan ukuran 4m2. Pengujian dilakukan mulai jam 18.00 sampai jam 19.00. Pengujian warna lampu LED secara berurutan yaitu Merah, Hijau, Putih, Biru dan Kuning. Foto pengujian alat dapat ditunjukkan pada Gambar 31.
Gambar 31. Foto Pengujian alat penangkap wereng uji coba pertama
Didalam alat penyedot diberi gelas plastik yang telah dilumuri lem bening, jika hama wereng tersedot masuk maka hama wereng akan menempel pada lem. Sehingga saat penghitungan hama wereng, dapat dihitung dengan mudah. Foto hasil pengujian wereng yang tertangkap uji coba pertama dapat ditunjukkan pada Gambar 32.
Gambar 32. Foto hasil pengujian wereng yang tertangkap uji coba pertama Pada uji coba tahap pertama maka dapat disimpulkan bahwa jumlah wama wereng terbanyak yang tertarik pada lampu LED berwarna Biru 129 ekor
hama wereng. Sedangkan warna lampu LED Hijau yang paling sedikit menarik hama wereng hanya 45 ekor hama wereng grafik dapat ditunjukkan Gambar 33.
Gambar 33. Grafik jumlah wereng tertangkap berdasarkan warna LED uji coba ke-1
3. Hasil Uji Coba Alat Ulangan kedua
Penguji cobaan alat penangkap wereng kedua pada tanggal 19 Oktober 2013 di sawah milik bapak Lilik dengan ukuran 4m2. Pengujian dilakukan mulai jam 18.00 sampai jam 19.00. Pengujian warna lampu LED secara berurutan yaitu Kuning, Merah, Hijau, Putih, dan Biru. Foto pengujian alat penangkap hama wereng pada uji coba kedua dapat ditunjukkan pada Gambar 34.
![Gambar 3. Siklus hidup hama wereng [18]](https://thumb-ap.123doks.com/thumbv2/123dok/4095703.2801253/20.892.321.665.256.589/gambar-siklus-hidup-hama-wereng.webp)
![Gambar 6. Rangkaian Skematik Driver Motor H. Bridge 30A [10]](https://thumb-ap.123doks.com/thumbv2/123dok/4095703.2801253/22.892.204.784.452.927/gambar-rangkaian-skematik-driver-motor-h-bridge-a.webp)
![Tabel 1. Konfigurasi pin Driver Motor H-Bridge 30A [10]:](https://thumb-ap.123doks.com/thumbv2/123dok/4095703.2801253/23.892.217.816.673.1087/tabel-konfigurasi-pin-driver-motor-h-bridge-a.webp)
![Tabel 2.Warna dan panjang gelombang LED [20]](https://thumb-ap.123doks.com/thumbv2/123dok/4095703.2801253/27.892.212.732.392.857/tabel-warna-dan-panjang-gelombang-led.webp)