RANCANG BANGUN SISTEM PENGGERAK KENDARAAN AIR
BERBASIS GETARAN STRUKTUR
ASEP ANDI
DEPARTEMEN TEKNIK MESIN DAN BIOSISTEM FAKULTAS TEKNOLOGI PERTANIAN
INSTITUT PERTANIAN BOGOR BOGOR
PERNYATAAN MENGENAI SKRIPSI DAN
SUMBER INFORMASI SERTA PELIMPAHAN HAK CIPTA*
Dengan ini saya menyatakan bahwa skripsi berjudul Rancang Bangun Sistem Penggerak Kendaraan Air Berbasis Getaran Struktur adalah benar karya saya dengan arahan dari komisi pembimbing dan belum diajukan dalam bentuk apa pun kepada perguruan tinggi mana pun. Sumber informasi yang berasal atau dikutip dari karya yang diterbitkan maupun tidak diterbitkan dari penulis lain telah disebutkan dalam teks dan dicantumkan dalam Daftar Pustaka di bagian akhir skripsi ini.Dengan ini saya melimpahkan hak cipta dari karya tulis saya kepada Institut Pertanian Bogor.
Bogor, Juni 2014
Asep Andi
ABSTRAK
ASEP ANDI. Rancang Bangun Sistem Penggerak Kendaraan Air Berbasis Getaran Struktur. Dibimbing oleh RADITE PRAEKO AGUS SETIAWAN.
Penggunaan gerak osilasi sirip (termasuk badannya) oleh hewan air untuk penggerak telah menginspirasi perancangan sistem penggerak kendaraan air. Para peneliti banyak mengkaji analisis getaran struktur untuk menyimulasikan getaran pada bangunan atau jembatan. Frekuensi pribadi atau frekuensi alami memiliki peranan penting dalam analisis tersebut. Sebagai contoh, bangunan atau jembatan akan mencapai titik runtuh (secara mikro) pada frekuensi pribadinya dengan energi yang minimum. Oleh karena itu, dapat diasumsikan bahwa penggunaan getaran struktur pada frekuensi alaminya sebagai propulsi (penggerak) kendaraan air akan mengurangi konsumsi energi. Tujuan dari penelitian ini adalah merancang sistem penggerak untuk kendaraan air menggunakan getaran struktur, menyimulasikan model untuk menghasilkan material dan frekuensi terbaik dengan energi minimum, dan menghitung kebutuhan energi dari kendaraan air melalui sebuah model. Solidworks (software) dan analisis digunakan untuk memodelkan dan menyimulasikan sistem. Hasil terbaik pada tipe fixed hinge menunjukkan bahwa struktur dengan dimensi panjang 500 mm, lebar 30 mm, dan tebal 0.5 mm yang bergetar di dalam air dapat menghasilkan gaya dorong sebesar 0.99 N yang dapat digunakan untuk menggerakkan model kendaraan air (dengan luas permukaan basah 0.72 m2) sampai batas kecepatan 0.79 m/s. Bahan terpilih yang digunakan adalah stainless steel yang dikuatkan, karena memiliki nilai modulus elastisitas yang tinggi dan korosivitas yang rendah.
Kata kunci: hewan air, getaran struktur, sistem penggerak kendaraan air, gaya dorong
ABSTRACT
ASEP ANDI. Design of Marine Propulsion System Based on Structural Vibration. Supervised by RADITE PRAEKO AGUS SETIAWAN.
The use of oscillating fins (including its body) by aquatic animals for propulsion has inspired the design of marine propulsion system in this research. Many researchers studied structural vibration analysis for simulating vibration on building or bridge. Natural frequency has important role of the analysis. For instance, building or bridge will get the rupture point (microscopic) on that natural frequency with minimum energy. Therefore, it can be assumed that structural vibration at the natural frequency as propulsion system for water vehicle will decrease the consumption of energy. The aims of this research were to design a propulsion system for water vehicle using structural vibration, to simulate the model for the best material and frequency of vibration with low energy use, and to calculate the energy requirement through a model. Solidworks (software) and numerical analysis has been used for modeling and simulating the system. The best result at fixed hinge type showed that vibrating structure with 500 mm length, 30 mm width, and 0.5 mm thickness in the water can produce 0.99 N of thrust that can be used for moving the water vehicle model (with 0.72 m2 of wetted area) until the limit of velocity 0.79 m/s. The selected material was annealed stainless steel, because it has big number of elastic modulus and corrosion less.
Skripsi
sebagai salah satu syarat untuk memperoleh gelar Sarjana Teknik
pada
Departemen Teknik Mesin dan Biosistem
RANCANG BANGUN SISTEM PENGGERAK KENDARAAN AIR
BERBASIS GETARAN STRUKTUR
ASEP ANDI
DEPARTEMEN TEKNIK MESIN DAN BIOSISTEM FAKULTAS TEKNOLOGI PERTANIAN
INSTITUT PERTANIAN BOGOR BOGOR
Judul Skripsi : Rancang Bangun Sistem Penggerak Kendaraan Air Berbasis Getaran Struktur
Nama : Asep Andi NIM : F14100014
Disetujui oleh
Dr. Ir. Radite Praeko Agus Setiawan, M.Agr Pembimbing
Diketahui oleh
Dr. Ir. Desrial, M.Eng Ketua Departemen
PRAKATA
Puji dan syukur penulis panjatkan kepada Allah subhanahu wa ta’ala atas segala karunia-Nya sehingga karya ilmiah ini berhasil diselesaikan. Tema yang dipilih dalam penelitian yang dilaksanakan sejak bulan Maret 2014 lalu ini ialah perancangan, dengan judul Rancang Bangun Sistem Penggerak Kendaraan Air Berbasis Getaran Struktur.
Terima kasih penulis ucapkan kepada Dr. Ir. Radite Praeko Agus Setiawan, M.Agr, Dr. Ir. Wawan Hermawan, MS, dan Dr. Ir. Mohamad Solahudin, M.Si yang telah banyak memberi saran dan masukan kepada penulis. Di samping itu, terima kasih penulis sampaikan kepada Direktorat Jenderal Pendidikan Tinggi (DITJEN DIKTI) Republik Indonesia yang telah memberikan beasiswa penuh kepada penulis selama masa studi melalui program Bidik Misi. Penghargaan diberikan kepada teman-teman dan semua pihak yang telah membantu selama perancangan dan pengumpulan data yang tidak bisa disebutkan satu per satu. Ungkapan syukur juga disampaikan kepada ayah, ibu, serta seluruh keluarga, atas segala doa dan kasih sayangnya.
Semoga karya ilmiah ini bermanfaat.
Bogor, Juni 2014
DAFTAR ISI
DAFTAR TABEL x DAFTAR GAMBAR x DAFTAR LAMPIRAN x PENDAHULUAN 1 Latar Belakang 1 Perumusan Masalah 1 Tujuan Penelitian 2Ruang Lingkup Penelitian 2
TINJAUAN PUSTAKA 2
Pola Gerak Ikan 2
Getaran dan Frekuensi Alami Sebuah Struktur 3
Gaya Dorong Kendaraan Air 4
Simulasi Solidworks 5
METODE 5
Waktu dan Tempat Penelitian 5
Alat dan Bahan 5
Prosedur Penelitian 5
HASIL DAN PEMBAHASAN 12
Pemilihan Bahan 12
Gambar Teknik dan Simulasi 13
Perhitungan Gaya Dorong (Thrust) yang Dihasilkan 20 Perhitungan Resistansi (RT) pada Kendaraan Air 24
Perhitungan Energi Kinetik 27
SIMPULAN DAN SARAN 28
Simpulan 28
Saran 28
DAFTAR PUSTAKA 29
LAMPIRAN 30
DAFTAR TABEL
1 Rentang nilai koefisien bentuk (Cb) dari kendaraan air 11
2 Karakteristik pertimbangan pemilihan bahan 12
3 Indeks sifat pembobotan dengan digital logic 12
4 Sifat berskala bahan 12
5 Karakteristik bahan AISI annealed stainless steel (SS) 13 6 Perbandingan hasil perhitungan numerik dengan hasil simulasi frekuensi
alami pada tipe pertama (fixed geometry) 14
7 Hasil simulasi stress pada fixed geometry dan fixed hinge 17 8 Gaya dorong yang dihasilkan tipe pertama (fixed geometry) tanpa fluida 20 9 Gaya dorong yang dihasilkan tipe pertama (fixed geometry) dalam fluida 21 10 Gaya dorong yang dihasilkan tipe pertama (fixed hinge) tanpa fluida 22 11 Gaya dorong yang dihasilkan tipe pertama (fixed hinge) dalam fluida 23 12 Hasil perhitungan gaya resistansi kendaraan air pada kecepatan yang berbeda 24 13 Hasil interpolasi kecepatan maju kendaraan air pada setiap panjang plat
struktur 26
14 Hasil perhitungan energi kinetik pada tipe pertama (fixed hinge) 27
DAFTAR GAMBAR
1 Gerakan kontralateral pada ikan (Mackean 2014) 3
2 Pola getaran pada struktur (Riley dan Sturges 1993) 3
3 Mode frekuensi alami dan persamaannya (Kelly 2012) 4
4 Sistem penggerak menggunakan propeller (Adji 2005) 4
5 Rancangan plat struktur tipe pertama 7
6 Tipe penjepitan yang digunakan, fixed geometry (a) dan fixed hinge (b) 7
7 Tampak atas dan melintang dari plat struktur 7
8 Rancangan plat struktur tipe kedua 8
9 Dimensi rancangan kendaraan air 10
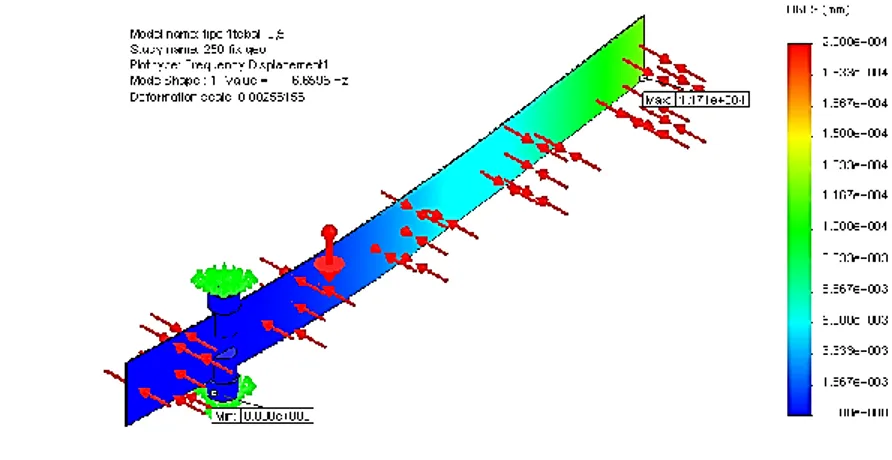
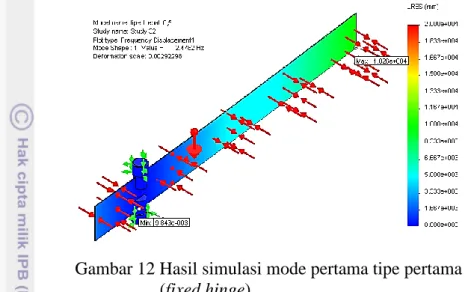
10 Tipe fixture yang digunakan, fixed geometry (a) dan fixed hinge (b) 13 11 Hasil simulasi frekuensi mode pertama tipe pertama (fixed geometry) 13 12 Hasil simulasi mode pertama tipe pertama (fixed hinge) 14
13 Mesh jenis fine pada simulasi Solidworks 15
14 Hubungan antara panjang plat (m) dengan frekuensi alami (Rad/s) 15
15 Hasil simulasi stress pada fixed geometry 16
16 Hasil simulasi stress pada fixed hinge 16
17 Hubungan antara panjang plat struktur terhadap maksimum stress yang terjadi 18 18 Hasil simulasi mode pertama tipe kedua (fixed geometry) 18 19 Hasil simulasi mode pertama tipe kedua (fixed hinge) 19 20 Perbandingan frekuensi alami pada panjang dan tipe yang berbeda 19 21 Hubungan antara panjang plat terhadap gaya dorong (T) dan bilangan
Reynold (Re) yang dihasilkan pada tipe fixed geometry 22 22 Hubungan antara panjang plat terhadap gaya dorong T dan bilangan Reynold
(Re) yang dihasilkan pada tipe fixed hinge 24
23 Hubungan antara kecepatan maju dengan resistansi kendaraan air 25 24 Hubungan antara frekuensi dengan gaya dorong per panjang plat struktur 26 25 Hubungan antara panjang plat struktur dengan kecepatan maju kendaraan air
dan indeks energi kinetik 28
DAFTAR LAMPIRAN
PENDAHULUAN
Latar Belakang
Alam menyajikan berbagai pelajaran yang berharga untuk dikembangkan oleh manusia. Salah-satunya adalah fenomena pergerakan hewan-hewan baik yang ada di darat maupun di air. Ikan bergerak dengan melawan kerapatan air yang lebih besar dibandingkan udara. Bentuk tubuh ikan yang hidrodinamis (streamline) memungkinkan ikan dapat bergerak secara horizontal dengan cepat. Ikan berenang dengan mengerahkan kekuatan terhadap air di sekitarnya. Ada pengecualian, tetapi ini biasanya disebabkan oleh kontraksi otot ikan di kedua sisinya untuk menghasilkan gelombang lenturan yang berjalan di sepanjang tubuh ikan dari hidung sampai ke ekor. Vektor gaya yang bekerja pada air dengan gerakan secara lateral menghasilkan gaya yang mendorong ikan ke depan. Hal serupa terjadi pada hewan seperti ular dan hewan melata lainnya.
Dalam tinjauan material, ketika bahan-bahan (suatu batang tipis) digetarkan maka akan terbentuk getaran dengan pola gelombang sesuai mode getarannya. Jika suatu material tersebut digetarkan pada frekuensi pribadinya maka akan menghasilkan defleksi output yang besar dengan energi input yang minimum. Hal tersebutlah yang menyebabkan gedung atau jembatan yang kokoh bisa roboh hanya oleh getaran yang energinya rendah. Jika suatu struktur berbentuk sirip digetarkan pada frekuensi pribadinya untuk menggerakkan kendaraan air maka akan menghasilkan gaya dorong ke depan dan diduga sumber energi kinetik penggerak yang dibutuhkan sangat minimal.
Kendaraan air memiliki prinsip yang sama dengan ikan, yakni gaya dorong harus bisa melawan gaya resistansi dari benda yang bergerak menerobos air. Sistem propulsi atau penggerak pada kendaraan air merupakan sistem yang sangat berperan dalam kemampuan gerak suatu kendaraan air. Saat ini hampir sebagian besar propulsi kendaraan air menggunakan propeller berbentuk kipas.
Dalam penelitian ini akan dirancang dan disimulasikan penggerak tipe sirip yang digetarkan untuk mendorong kendaraan air ke depan yang dihasilkan dari sebuah getaran struktur sirip tersebut. Putaran yang dihasilkan enjin atau motor akan ditransmisikan kedalam sebuah mekanisme getaran sehingga bisa mendorong kapal kearah depan. Diharapkan dengan menggunakan daya input yang lebih kecil, gaya propulsi yang dihasilkan bisa lebih besar jika mendekati frekuensi pribadinya. Sehingga penggunaan sumber energi (dalam hal ini menggunakan motor listrik) bisa menjadi lebih hemat dan efisien. Penggunaan motor listrik tersebut sesuai dengan arah maju teknologi saat ini yang memprediksikan bahwa energi bahan bakar akan mulai hilang dan beralih ke sistem listrik.
Perumusan Masalah
Jika ada benda bentuk pipih memanjang akan bisa digetarkan dan menghasilkan defleksi yang besar dengan energi paling rendah pada frekuensi alaminya. Prinsip ini jika diterapkan sebagai pengganti sirip penggerak untuk kendaraan air maka dapat menggerakkan kendaraan air ke depan. Selama ini, sebagian besar kendaraan air menggunakan penggerak berupa motor yang
ditransmisikan untuk menggerakkan propeller sehingga bisa menghasilkan gaya dorong ke depan. Energi yang digunakan untuk memutar propeller tersebut cukup besar karena adanya turbulensi sehingga tidak ramah lingkungan.
Tujuan Penelitian
Tujuan dari penelitian ini adalah mendesain sistem penghasil gaya dorong (thrust) untuk menggerakkan kendaraan air dengan memanfaatkan getaran struktur suatu sirip. Hasil rancangan tersebut akan disimulasikan dengan
Solidworks untuk mencari bahan dan dimensi yang paling tepat dalam menghasilkan frekuensi getaran paling optimum dengan energi paling rendah serta perhitungan dan analisis dinamis dari struktur yang digetarkan.
Ruang Lingkup Penelitian
Penelitian ini hanya dibatasi untuk pemodelan dan simulasi menggunakan software Solidworks dalam menentukan natural frequency dan stress dari plat struktur yang bergetar. Selain itu dilakukan juga perhitungan secara numerik menggunakan Microsoft Excel sebagai validasi dari hasil simulasi dan membandingkannya dengan hasil penelitian yang sudah pernah dilakukan sebelumnya.
TINJAUAN PUSTAKA
Pola Gerak Ikan
Menurut Nurshall (1979) ada dua karakteristik utama dalam mekanisme dasar pergerakan renang ikan, yaitu:
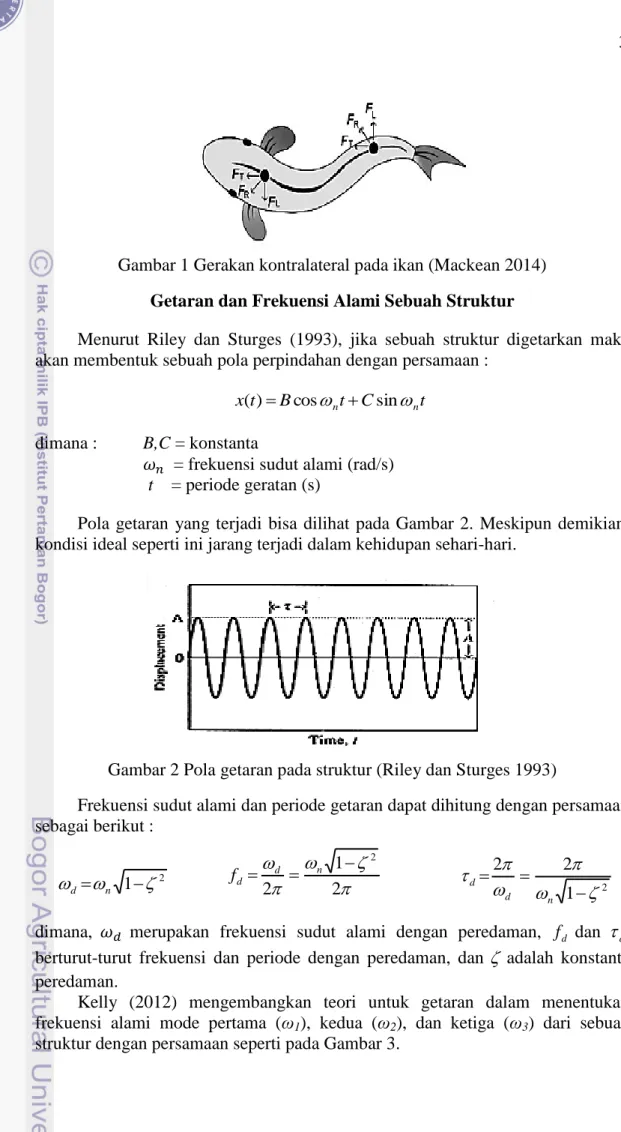
1. Gerakan kontralateral, yaitu berupa gelombang metachronal yang berawal dari ekor bagian belakang dengan peningkatan amplitudo yang semakin membesar ke depan. Gerakan tersebut disebabkan oleh serangkaian kontraksi urat daging (Myomere).
2. Lintasan gerakan tubuh secara transversal yang timbul akibat gerakan tersebut di atas dan ini akan menimbulkan daya tolak. Daya tolak tersebut dapat digambarkan akibat terbentuknya suatu sudut antara bagian-bagian tubuh yang bergerak dengan arah lintasan pergerakan ikan tersebut. Sudut-sudut ini bervariasi besarnya, dimana maksimum pada saat bagian tubuh terjauh dari poros lintasan gerakan dan minimum pada saat memotong poros lintasan gerakan. Amplitudo ganda inilah yang menentukan nilai bilangan Strouhal (St Number) dari gerak ikan. Bilangan strouhal ini yang menentukan kecepatan pergerakan ikan di dalam air. Selain kecepatan pergerakan tubuh ikan dari samping ke samping memotong poros lintasan kecepatannya juga bervariasi.
Menurut Mackean (2014), daya tolak maksimum terjadi pada saat bagian-bagian tubuh melalui poros lintasan gerakan maju dari ikan tersebut. Gerakan tersebut ditunjukkan seperti pada Gambar 1.
Gambar 1 Gerakan kontralateral pada ikan (Mackean 2014)
Getaran dan Frekuensi Alami Sebuah Struktur
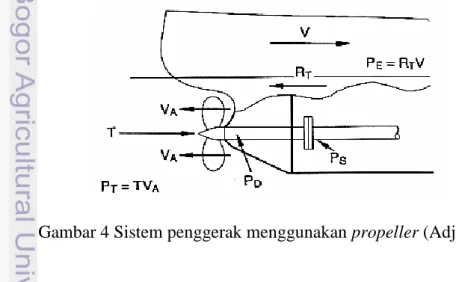
Menurut Riley dan Sturges (1993), jika sebuah struktur digetarkan maka akan membentuk sebuah pola perpindahan dengan persamaan :
t C t B t x( ) cosn sinn dimana : B,C = konstanta
= frekuensi sudut alami (rad/s)
t = periode geratan (s)
Pola getaran yang terjadi bisa dilihat pada Gambar 2. Meskipun demikian, kondisi ideal seperti ini jarang terjadi dalam kehidupan sehari-hari.
Gambar 2 Pola getaran pada struktur (Riley dan Sturges 1993)
Frekuensi sudut alami dan periode getaran dapat dihitung dengan persamaan sebagai berikut :
dimana, merupakan frekuensi sudut alami dengan peredaman, fd dan d berturut-turut frekuensi dan periode dengan peredaman, dan adalah konstanta peredaman.
Kelly (2012) mengembangkan teori untuk getaran dalam menentukan frekuensi alami mode pertama (ω1), kedua (ω2), dan ketiga (ω3) dari sebuah struktur dengan persamaan seperti pada Gambar 3.
2 1 d n 2 1 2 2 d n d f 2 1 2 2 n d d
3 2 1 (1,875) mL EI 3 2 2 (4,694) mL EI 3 2 3 (7,855) mL EI
Gambar 3 Mode frekuensi alami dan persamaannya (Kelly 2012)
dimana, E merupakan modulus elastisitas (N/m2), I merupakan momen inersia (m4), m merupakan massa (kg), dan L merupakan panjang dari plat struktur (m).
Gaya Dorong Kendaraan Air
Secara umum kendaraan air yang bergerak pada permukaan air dengan kecepatan tertentu akan mengalami gaya hambat (resistance) yang berlawanan dengan arah gerak kendaraan air tersebut. Besarnya gaya hambat tersebut harus bisa diatasi dengan gaya dorong (thrust) yang dihasilkan dari kerja alat gerak kapal (propulsor) (Adji 2005).
Gaya dorong (T) yang diperlukan untuk mendorong sebuah kapal pada kecepatan (V) tertentu akan lebih besar daripada tahanan total (RT) yang dialami
oleh kapal bila kapal tersebut ditarik dengan kecepatan yang sama (V), sehingga terjadi penambahan (augment) hambatan (Hadi dan Budiarto 2008).
Pada kenyataannya, gaya dorong sebesar T akan mendapatkan gaya hambat sebesar RT yang harus diatasi. Sehingga gaya dorong yang dibutuhkan harus
mengetahui gaya deduksinya. Nilai tersebut berbeda-beda dan dipengaruhi oleh faktor dimensi dari kendaraan air yang dikehendaki.
Sistem penggerak menggunakan propeller mentransmisikan putaran enjin menjadi putaran pada bilah-bilah berbentuk kipas seperti pada Gambar 4.
Simulasi Solidworks
Solidworks adalah sebuah program Computer Aided Design (CAD) 3D yang menggunakan sistem operasi Windows. Selain mendesain, software ini juga bisa digunakan untuk simulasi dan analisis interaksi solid dengan solid atau solid dengan fluida serta perhitungan statika dan dinamika dari struktur. Hasil perhitungan tersebut kemudian bisa dijadikan sebagai acuan dalam proses pabrikasi.
METODE
Waktu dan Tempat Penelitian
Penelitian ini dilakukan selama 4 bulan dari mulai Maret – Juni 2014. Tempat penelitian dilakukan di Engineering Design Studio (EDS) dan Laboratorium Mekatronika, Departemen Teknik Mesin dan Biosistem IPB.
Alat dan Bahan
Alat yang digunakan dalam penelitian ini adalah seperangkat komputer untuk proses perancangan simulasi dan analisis numerik, software Solidworks Premium 2011, dan software Microsoft Office 2010. Sedangkan bahan yang digunakan merupakan bahan yang akan ditentukan jenis, ukuran dan hasil getarannya berupa bahan-bahan pipih yang dikuatkan (Aluminium, Besi, Stainless Steel, dan PVC).
Prosedur Penelitian Perumusan Ide Rancangan
Perumusan ide rancangan dimulai dengan menentukan bahan-bahan yang akan digunakan dalam simulasi. Hasil pemilihan bahan tersebut akan sangat mempengaruhi hasil simulasi karena karakteristik dari setiap struktur yang berbeda-beda. Kemudian gambar teknik (gambar 3D) dibuat dalam bentuk plat datar dimana panjang lebih dominan terhadap lebar dan lebar dominan terhadap tebal dari plat struktur yang akan disimulasikan. Selain itu juga dibuat bentuk lain sebagai pembanding. Plat struktur yang bergetar tersebut disimulasikan untuk mengetahui gaya dorong (thrust) yang dihasilkan jika dibenamkan di dalam air sehingga dapat menjadi alat penggerak untuk kendaraan air. Rancangan dan simulasi ini merupakan model yang dapat diskalakan menjadi bentuk sebenarnya. Asumsi-asumsi yang digunakan dalam penelitian ini adalah sebagai berikut : 1. Simulasi menggunakan karakterisitk bahan yang dipilih sesuai nilai yang ada
pada software SolidworksPremium 2011.
2. Kondisi batasan pada simulasi dan analisis numerik menggunakan propertis dari air secara umum (massa jenis 1000 kg/m3) tanpa adanya gelombang turbulensi dari lingkungan (misalnya ombak) pada suhu air 30oC. Viskositas dinamik dan kinematik pada suhu tersebut berturut-turut 0.798 x 10-3 Ns/m2 dan 0.801 x 10-6 m2/s.
3. Tekanan air yang digunakan adalah tekanan air pada kedalaman 10 cm dari permukaan yakni sebesar 981 N/m2.
4. Gravitasi yang digunakan adalah gravitasi bumi yakni 9.81 m/s2.
Analisis yang dilakukan dalam penelitian ini meliputi analisis pemilihan bahan terbaik, analisis frekuensi alami, analisis stress, analisis gaya dorong (thrust), analisis gaya hambat (resistansi) pada kendaraan air, analisis kecepatan maju kendaraan air, dan analisis energi kinetik.
Analisis Pemilihan Bahan
Proses pemilihan bahan menggunakan metode pembobotan dengan memperhatikan karakteristik dari masing-masing bahan yang dipilih. Menurut Dieter (1991), langkah-langkah dalam metode ini dimulai dengan menentukan indeks sifat pembobot dengan digital logic, indeks berskala, dan penentuan bahan terbaik. Penentuan indeks sifat pembobot (w) dengan digital logic didasarkan pada tingkat kepentingan dari masing-masing kombinasi sifat dan bahan yang tersedia. Bobot yang diharapkan bernilai satu (1) sedangkan yang lainnya nol (0). Kemudian indeks berskala ( ) dilakukan dengan membandingkan nilai yang diharapkan tinggi dan nilai yang diharapkan rendah. Nilai yang diharapkan tinggi dirumuskan dengan :
dimana, adalah nilai numerik sifat dan adalah nilai terbesar yang dipertimbangkan. Jika nilai yang diharapkan rendah, maka dirumuskan dengan :
dimana, K merupakan nilai terkecil yang dipertimbangkan. Untuk parameter yang tidak memiliki nilai numerik, maka diberi nilai relatif yang sesuai. Penentuan bahan terbaik dimulai dengan menjumlahkan hasil perkalian indeks sifat pembobot dengan indeks berskala :
∑
Bahan dengan nilai terbesar merupakan bahan yang menjadi pilihan utama.
Gambar Teknik dan Simulasi
Gambar teknik diperlukan agar dapat memudahkan dalam proses simulasi dan pembuatan model. Gambar teknik harus memperhatikan dimensi dan skala. Dalam penelitian ini, perancangan dibuat dengan beberapa skala dan bentuk yang berbeda-beda. Sehubungan dengan ukuran kendaraan air sebenarnya cukup besar, pada penelitian ini disimulasikan model dengan rasio perbandingan yang lebih kecil sehingga dapat diskalakan menjadi ukuran sebenarnya. Dengan demikian dapat ditentukan bentuk dan ukuran terbaik dari rancangan yang dibuat.
Perancangan sistem penggerak ini berupa model plat tipis dengan ketebalan (h) konstan 0.5 mm dan lebar (b) konstan 30 mm yang dibuat dengan kombinasi
panjang (l) yang berbeda-beda yakni 250, 300, 350, 400, 450, 500, 550, 600, 650, 700 dan 750 mm (Gambar 5) yang kemudian disebut sebagai rancangan plat struktur tipe pertama.
Gambar 5 Rancangan plat struktur tipe pertama
Sebuah penjepit diletakkan pada jarak 50 mm dari pangkal. Tipe penjepitan yang digunakan dapat diilustrasikan seperti pada Gambar 6.
(a)
(b)
Plat struktur tersebut akan bergerak osilasi lebih dominan ke arah sumbu x. Pemberian simbol dalam rancangan tampak atas dan melintang untuk mempermudah dalam proses perhitungan selanjutnya diberikan pada Gambar 7.
Gambar 7 Tampak atas dan melintang dari plat struktur Gambar 6 Tipe penjepitan yang digunakan, fixed
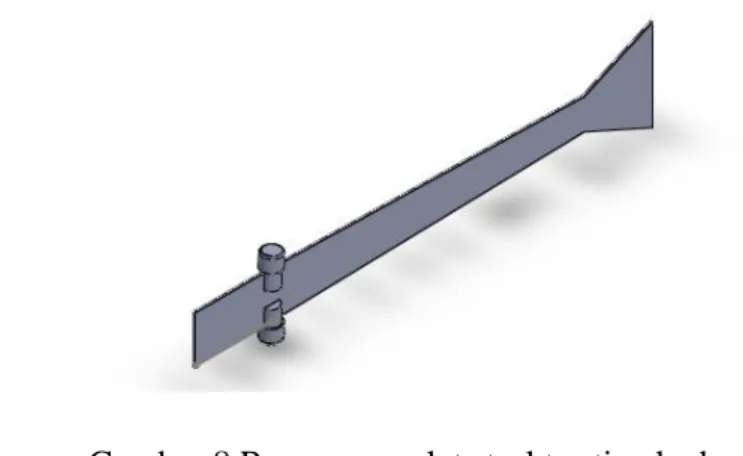
Kemudian pada rancangan kedua akan dilihat pengaruh bentuk tiga dimensi dari plat struktur terhadap frekuensi yang dihasilkan dengan mengubah rancangan menjadi seperti bentuk ekor ikan (Gambar 8).
Gambar 8 Rancangan plat struktur tipe kedua
Setelah gambar rancangan selesai, simulasi dilakukan dengan dua jenis studi yakni studi frequency dan non-linear dynamic pada menu Simulation. Kemudian hasil simulasi tersebut akan digunakan untuk perhitungan gaya dorong (thrust) dan energi selanjutnya. Langkah-langkah studi frequency dan non-linear dynamic
yang dilakukan yakni dengan memilih new study (frequency dan non-linear dynamic) kemudian menentukan jenis material yang digunakan (berdasarkan hasil metode pemilihan bahan), menentukan jenis fixture (fixed geometry dan fixed hinge), menentukan jenis external load (pressure dan gravity), menentukan tipe
connections, menentukan mesh (medium dan fine), menentukan properties, dan yang terakhir menjalankan simulasi denganmemilih run.
Validasi Hasil Simulasi Menggunakan Perhitungan Secara Numerik
Hasil simulasi menggunakan Solidworks kemudian dibandingkan dengan hasil perhitungan secara numerik untuk melihat keabsahan hasil simulasi tersebut. Dalam penelitian ini akan digunakan hasil simulasi pada frekuensi alami mode pertama dengan pertimbangan bahwa pada frekuensi pertama tersebut nilai amplitudo terbesar dihasilkan dengan energi yang paling rendah. Hal terpenting lain yang perlu diperhatikan adalah nilai stress dari struktur yang digetarkan dalam periode tertentu harus lebih kecil dari titik batas elastisnya agar tidak terjadi terakan atau patahan pada struktur.
Perhitungan Gaya Dorong (T) yang Dihasilkan
Perhitungan gaya dorong (thrust) yang dihasilkan dengan mengabaikan viskositas dan aliran dari fluida dapat mengikuti persamaan yang dikembangkan oleh Faccy et al (2013) : 2 ) , ( ˆ2 t l m T
dimana, T merupakan gaya dorong rata-rata dalam satu periode (N), m adalah massa dari plat struktur (kg), dan ˆ adalah turunan pertama terhadap waktu dari frekuensi (rad/s2). Massa dari plat struktur dapat diketahui dari nilai pada
Solidworks atau dapat didekati dengan perhitungan secara numerik sebagai berikut : 2 4 1 b m
Berdasarkan persamaan diatas, secara keseluruhan gaya dorong dapat dihitung dengan memperhatikan nilai displacement (δ) atau simpangan terjauh sebagai berikut : 2 2 2 16 b T
Perhitungan tersebut jika dilihat dari plat struktur yang digetarkan tidak berada di dalam fluida. Perhitungan ini banyak dilakukan pada jenis analisis dua dimensi dari plat struktur yang digetarkan. Namun, jika dilihat dari fluida yang ada di sekitar plat struktur tersebut persamaan gaya dorong per satuan lebar plat menjadi sebagai berikut :
2 9 Re 10 13 . 1 x b T
dimana, λ merupakan perbandingan antara lebar dengan panjang plat (b/l), dan Re
merupakan bilangan Reynold yang dapat diketahui dengan persamaan yang dikembangkan oleh Sader et al (1998) berikut :
b
Re
dimana, ω merupakan frekeunsi alami (rad/s), ρ merupakan massa jenis fluida (kg/m3), δ merupakan simpangan terjauh (m), dan µ adalah viskositas dinamik dari fluida (Ns/m2). Viskositas dinamik air pada suhu 30oC adalah 0.798 x 10-3 Ns/m2.
Kemudian koefisien gaya dorong (CT) dapat menjadi parameter
pengamatan dalam melihat efek dari bentuk plat, bilangan Reynold, dan amplitudo getaran dengan persamaan sebagai berikut :
lb T CT 2 2
Menurut Facci et al (2013), nilai CT dari bentuk tiga dimensi (3D) dapat
diformulasikan sebagai berikut :
82 . 0 15 . 0 2 Re 10 7 . 3 x CT
Perhitungan Resistansi (RT) pada Badan Kendaraan Air
Pada penelitian ini, model kendaraan air yang dirancang adalah tipe fishing craft dengan dimensi panjang basah (L) 1 m, lebar basah (B) 0.4 m, dan tinggi basah (H) 0.2 m seperti pada Gambar 9.
Gambar 9 Dimensi rancangan kendaraan air
Resistansi pada badan kendaraan air merupakan fungsi dari berbagai faktor baik yang disebabkan oleh air, udara, atau karakteristik bahan dari kendaraan air itu sendiri. Tipe model kendaraan air dalam penelitian ini adalah tipe fishing craft. Menurut Adji (2005), resistansi pada badan kendaraan air dapat diformulasikan sebagai berikut : 2 5 . 0 F s T C SV R
dimana, ρ merupakan massa jenis air (kg/m3), CF merupakan koefisien tahanan total kapal, S merupakan luas permukaan basah (m2), dan Vs merupakan kecepatan servis kendaraan air (m/s). Pada penelitian ini, tahanan total diasumsikan hanya diakibatkan oleh interaksi antara permukaan kendaraan air dengan air. Massa jenis air yang digunakan dalam simulasi ini adalah 1000 kg/m3. Kemudian nilai CFdapat ditentukan dengan pesamaan :
2 ) 2 ) (Re ( 075 . 0 L F Log C
Simbol Re digunakan untuk membedakan antara bilangan Reynold air L yang diakibatkan oleh getaran struktur (persamaan sebelumnya) dengan bilangan Reynold air yang ada disepanjang badan kendaraan air. Nilai Re dapat dihitung L dengan persamaan sebagai berikut :
k s L V L V Re
dimana, Vs merupakan kecepatan maju kendaraan air (m/s), L merupakan panjang basah kendaraan air (m), dan Vk merupakan viskositas kinematik dari air (m2/s). Viskositas kinematik air pada suhu 30oC adalah 0.801 x 10-6 m2/s.
Luas area basah (S) dari kendaraan air dapat ditentukan dengan menggunakan rumus yang dikembangkan oleh Rogenstad (1999) berikut :
) 2 2 (BL BT LT C S b
dimana, Cb merupakan koefisien balok atau bentuk dari kendaraan air, B merupakan lebar basah kendaraan air, L merupakan panjang basah kendaraan air,
0.2 m
dan T merupakan tinggi bagian kendaraan air yang tenggelam di dalam air. Nilai
Cb dapat ditentukan dengan melihat Tabel 1. Pada perancangan ini digunakan nilai
Cb untuk tipe fishing craft sebesar 0.75.
Tabel 1 Rentang nilai koefisien bentuk (Cb) dari kendaraan air Tipe Rentang Nilai Cb Cb
Tank/Bulk 0.80-0.85 0.83 Container/Dry cargo 0.55-0.65 0.60 Passenger/RO-RO 0.50-0.60 0.57 Supply/Tug 0.70-0.80 0.75 Fishing craft 0.70-0.80 0.75 Sumber : Rognstad 1999
Untuk mengetahui kemampuan batas maksimum kecepatan yang dihasilkan maka dilakukan simulasi numerik menggunakan Microsoft Excel untuk mendapatkan hubungan antara nilai kecepatan maju (Vs) dengan hambatan kendaraan air (RT). Nilai hambatan kendaraan air tersebut harus bisa diatasi oleh nilai gaya dorong (T) yang dihasilkan oleh sistem penggerak agar kendaraan air dapat bergerak ke depan.
Perhitungan Energi Kinetik
Energi kinetik dibagi menjadi dua yakni energi kinetik getaran (EKV) pada
alat penggerak dan energi kinetik translasi (EKT) pada kendaraan air yang
bergerak. Energi kinetik getaran dapat dirumuskan sebagai berikut : 2
2
1
I EKV
dimana, I merupakan inersia massa dari plat struktur yang bergetar (kg.m2), dan ω merupakan frekuensi getaran (rad/s). Inersia massa dari struktur berbentuk plat persegi panjang dengan poros pada bagian pangkal dapat dirumuskan sebagai berikut : 2 1 3 1 L m I
dimana, m1 merupakan massa dari plat struktur (kg), dan L merupakan panjang dari plat struktur (m). Selanjutnya energi kinetik translasi dapat dirumuskan sebagai berikut : 2 2 2 1 s T mV EK
dimana, m2 merupakan massa kendaraan air (kg) dan Vs merupakan kecepatan maju kendaraan air (m/s). Selanjutnya adalah mencari indeks atau perbandingan antara energi kinetik getaran dengan energi kinetik translasi dengan persamaan :
2 1 m EK m EK Indeks T V
HASIL DAN PEMBAHASAN
Pemilihan Bahan
Pemilihan bahan dilakukan dengan menggunakan metode pembobotan. Karakteristik dari bahan yang akan dipilih disajikan pada Tabel 2.
Tabel 2 Karakteristik pertimbangan pemilihan bahan
No Bahan Elastic Modulus (GPa) Yield strength (MPa) Korosivitas Biaya (Rp/kg) 1 Aluminium 72.4 415 Sedang (50) 20,000
2 Gray cast iron 66.17 205 Tinggi (80) 30,000
3 Stainless steel 193 234.4 Rendah (10) 25,000
4 PVC rigid 2.41 58.7 Rendah (10) 20,000
Kemudian dilakukan penentuan indeks sifat pembobotan (w) seperti pada Tabel 3.
Tabel 3 Indeks sifat pembobotan dengan digital logic
Sifat 1-2 1-3 1-4 2-3 2-4 3-4 Total Pembobot
1 1 1 1 3 ⁄
2 0 1 1 2 ⁄
3 0 0 1 1 ⁄
4 0 0 0 0 0
Total 6 1
Dalam hal ini, elastic modulus dan yield strength diharapkan tinggi sedangkan korosivitas dan harga diharapkan rendah. Kemudian ditentukan sifat berskala dari bahan (β) dan nilai seperti pada Tabel 4.
Tabel 4 Sifat berskala bahan
Bahan Sifat ( ) 1 2 3 4 ⁄ ⁄ ⁄ 0 Aluminium 0.375 1 0.200 1 0.554231
Gray cast iron 0.343 0.494 0.125 0.670 0.356917
Stainless steel 1 0.415 1 0.800 0.805116
PVC rigid 0.012 0.141 1 1 0.220059
Penentuan bahan dilakukan dengan menjumlahkan hasil perkalian pembobot dengan sifat berskala dari masing-masing bahan. Kemudian dipilih nilai yang
Ket.: Sifat (1) Elastic Modulus (GPa), (2) Yield Strength (MPa), (3) Korisivitas, dan (4) Biaya (Rp/kg)
paling besar yakni bahan Stainless steel. Pada penelitian ini, jenis stainless steel
yang digunakan adalah jenis AISI annealed stainless steel (SS) yang sudah tersedia didalam propertis Solidwork Premium 2011.
Gambar Teknik dan Simulasi
Berdasarkan pemilihan bahan sebelumnya, bahan yang digunakan adalah
AISI annealed stainless steel (SS) dengan karakteristik seperti pada Tabel 5. Tabel 5 Karakteristik bahan AISI annealed stainless steel (SS)
Karakteristik Satuan Nilai
Yield strength N/m2 2.34422 x 108
Tensile strength N/m2 6.2 x 108
Mass density kg/m3 8000
Elastic modulus N/m2 1.93 x 1011
Poisson's ratio - 0.27
Fixture yang digunakan pada simulasi ini adalah fixed geometry dan fixed hinge pada sebuah penjepit silinder dengan diameter 10 mm seperti pada Gambar 10.
(a) (b)
Kondisi lingkungan yang digunakan pada simulasi adalah tekanan air pada kedalaman 10 cm sebesar 981 N/m2 dan percepatan gravitasi sebesar 9.81 m/s2 dengan tipe mesh yang digunakan adalah fine. Hasil simulasi tipe pertama dengan fixture fixed geometry dapat dilihat pada Gambar 11.
Gambar 10 Tipe fixture yang digunakan, fixed geometry (a) dan fixed hinge (b)
Gambar 11 Hasil simulasi frekuensi mode pertama tipe pertama (fixed geometry)
Nilai yang dihasilkan dari simulasi ini adalah frekuensi alami (ωn),
simpangan atau displacement (δ) dengan skala peubahnya, dan perioda (T). Hasil simulasi tipe pertama dengan fixture fixed hinge dapat dilihat pada Gambar 12.
Tipe mesh yang digunakan mempengaruhi hasil simulasi yang didapatkan dimana semakin kasar (coarse) tipe mesh yang digunakan, kemungkinan menganalisis benda yang kecil akan menjadi kurang akurat. Hal serupa juga dilaporkan oleh Facci et al (2013) dalam penelitiannya tentang analisis efek tiga dimensi dari plat pipih yang bergetar di dalam fluida. Dalam penelitian ini, ketebalan jauh lebih kecil dari lebar dan panjang struktur yang digetarkan sehingga yang menjadi fokus gerakan osilasi getaran adalah arah horizontal x pada mode pertama dan mode kedua. Hasil simulasi frekuensi alami mode pertama dan kedua dapat dilihat pada Tabel 6.
Tabel 6 Perbandingan hasil perhitungan numerik dengan hasil simulasi frekuensi alami pada tipe pertama (fixed geometry)
Panjang (mm)
Frekuensi Alami (Rad/s) Hasil Numerik Hasil Simulasi
Error 1
(%)
Error 2
(%) Mode 1 Mode 2 Mode 1 Mode 2
250 39.88 249.93 41.86 262.87 4.73 4.92 300 27.69 173.56 28.78 180.98 3.77 4.10 350 20.35 127.52 20.97 132.10 2.97 3.47 400 15.58 97.63 15.93 100.62 2.23 2.97 450 12.31 77.14 12.49 79.16 1.42 2.55 500 10.50 63.08 10.02 63.87 0.46 1.24 550 8.24 51.64 8.17 52.53 0.85 1.70 600 6.92 43.39 6.74 43.92 2.69 1.21 650 5.90 36.97 5.60 37.19 5.36 0.59 700 5.09 31.88 4.65 31.82 9.48 0.19 750 4.43 27.77 3.82 27.44 16.11 1.20
Gambar 12 Hasil simulasi mode pertama tipe pertama (fixed hinge)
Analisis numerik dilakukan sebagai validasi dari hasil simulasi. Meskipun demikian, nilai error yang cukup tinggi dihasilkan karena adanya perbedaan penempatan fixture atau bagian yang dibuat diam. Pada analisis numerik, bagian yang diam berada disepanjang potongan melintang plat, sedangkan pada simulasi menggunakan poros yang dibuat diam dan menjepit plat pada kedua ujung (Gambar 10a). Dengan kata lain, kekakuan dari bahan yang diam mempengaruhi hasil simulasi pada getaran. Selain itu, pada hasil simulasi ada kemungkinan bahwa struktur yang digetarkan bukan merupakan suatu kesatuan yang utuh sehingga tidak terdistribusi secara menyeluruh (Mesh jenis fine pada solidworks
merupakan nilai relatif terhadap luasan struktur yang akan dianalisis) seperti pada Gambar 13.
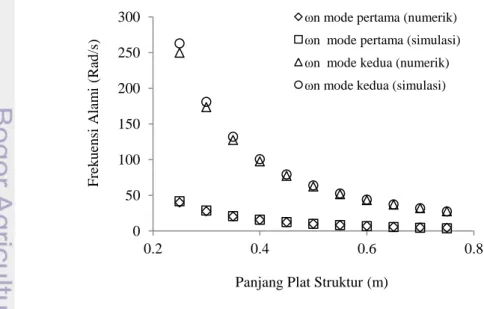
Riesch et al (2008) dalam penelitiannya menggunakan plat tipis silikon (dengan tebal yang sama yakni 0.5 mm namun panjang yang berbeda) untuk mengetahui karakteristik dari fluida yang diakibatkan plat yang bergetar. Hasil tersebut menunjukkan bahwa semakin pendek plat yang digetarkan, frekuensi alami yang dihasilkan semakin besar. Namun analisis tersebut masih terbatas pada dua dimensi tanpa memperhatikan karakteristik dari bahan yang digetarkan. Hasil simulasi frekuensi alami dengan panjang yang berbeda-beda sudah sesuai dengan pernyataan tersebut seperti pada Gambar 14.
0 50 100 150 200 250 300 0.2 0.4 0.6 0.8 Fre k u en si A lam i (R ad /s )
Panjang Plat Struktur (m)
ωn mode pertama (numerik) ωn mode pertama (simulasi) ωn mode kedua (numerik) ωn mode kedua (simulasi)
Gambar 13 Mesh jenis fine pada simulasi Solidworks
Gambar 14 Hubungan antara panjang plat (m) dengan frekuensi alami (Rad/s)
Hasil simulasi dengan fixed geometry menunjukkan nilai frekuensi alami yang lebih besar daripada fixed hinge. Pada fixed geometry, penurunan frekuensi yang seiring dengan penambahan panjang plat lebih cepat dibandingkan dengan penurunan frekuensi pada fixed hinge. Secara teoritis, frekuensi alami dari struktur merupakan fungsi dari modulus elastisitas (E), inersia area (I), dan dimensi (b,h,l) dari struktur yang digetarkan. Dengan demikian, nilai inersia area dari struktur berbentuk plat akan lebih kecil jika dibandingkan dengan perubahan panjang yang terjadi. Hal inilah yang menyebabkan frekuensi alami baik pada fixed geometry
atau fixed hinge akan semakin mendekati nilai yang sama terutama pada mode frekuensi yang lebih tinggi.
Analisis stress yang terjadi pada struktur dimaksudkan untuk mengetahui tingkat deformasi dari struktur akibar adanya getaran pada defleksi maksimum. Jika nilai stress yang terjadi melebihi nilai yield strength dari struktur maka diprediksikan adanya kemungkinan terjadi retakan secara mikroskopis. Namun dalam penelitian ini, faktor pembatas dari stress yang ditimbulkan adalah nilai
elastic modulus dari bahan tersebut. Dengan kata lain, jika stress melebihi nilai
elastic modulus maka struktur tersebut masuk ke batas plastis dan diprediksikan akan patah. Contoh hasil analisis stress pada tipe pertama ukuran panjang 250 mm dapat dilihat pada Gambar 15.
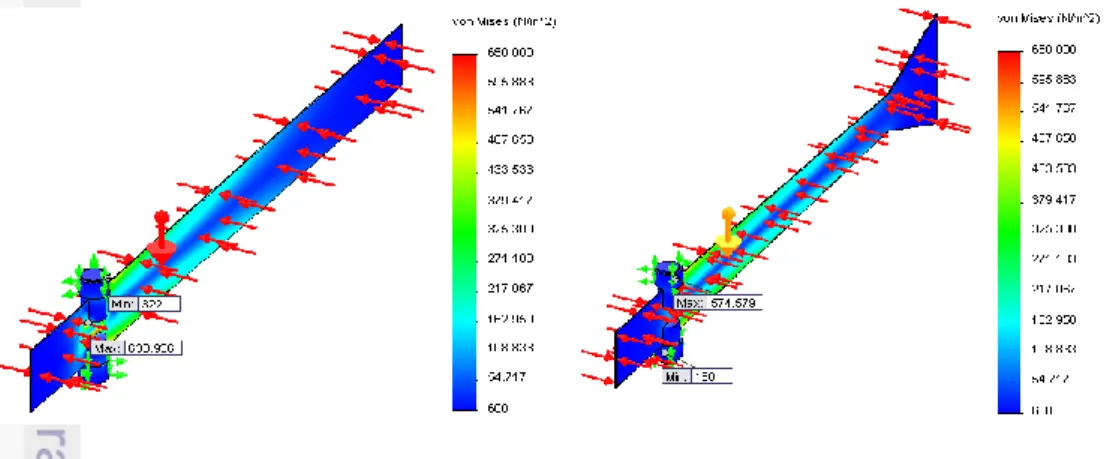
Bagian yang mendapatkan nilai stress tertinggi berada pada sekitar penjepit. Sehingga dapat dipastikan bahwa tipe fixture mempengaruhi dalam analisis dinamik dari plat struktur tersebut. Analisis dengan tipe fixture yang berbeda disajikan pada Gambar 16.
Gambar 15 Hasil simulasi stress pada fixed geometry
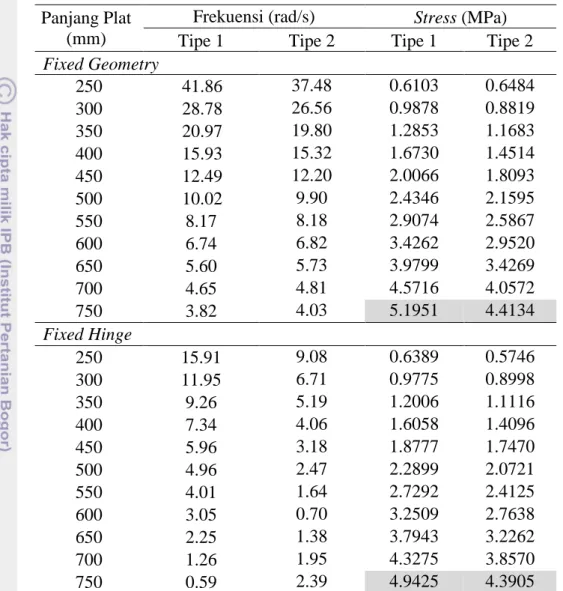
Hasil simulasi stress pada struktur secara umum menunjukkan bahwa semakin kecil frekuensi yang dihasilkan maka semakin besar stress yang terjadi pada struktur tersebut seperti pada Tabel 7.
Panjang Plat (mm)
Frekuensi (rad/s) Stress (MPa)
Tipe 1 Tipe 2 Tipe 1 Tipe 2
Fixed Geometry 250 41.86 37.48 0.6103 0.6484 300 28.78 26.56 0.9878 0.8819 350 20.97 19.80 1.2853 1.1683 400 15.93 15.32 1.6730 1.4514 450 12.49 12.20 2.0066 1.8093 500 10.02 9.90 2.4346 2.1595 550 8.17 8.18 2.9074 2.5867 600 6.74 6.82 3.4262 2.9520 650 5.60 5.73 3.9799 3.4269 700 4.65 4.81 4.5716 4.0572 750 3.82 4.03 5.1951 4.4134 Fixed Hinge 250 15.91 9.08 0.6389 0.5746 300 11.95 6.71 0.9775 0.8998 350 9.26 5.19 1.2006 1.1116 400 7.34 4.06 1.6058 1.4096 450 5.96 3.18 1.8777 1.7470 500 4.96 2.47 2.2899 2.0721 550 4.01 1.64 2.7292 2.4125 600 3.05 0.70 3.2509 2.7638 650 2.25 1.38 3.7943 3.2262 700 1.26 1.95 4.3275 3.8570 750 0.59 2.39 4.9425 4.3905
Ozturk (2011), dalam penelitiannya tentang analisis stress pada plat yang diberi pembebanan pada bagian ujung menyatakan bahwa faktor pembebanan semakin hilang pada setiap peningkatan mode frekuensi alami yang dihasilkan. Semakin besar mode frekuensi maka semakin besar pula nilai frekuensinya. Hal tersebut dapat dilihat pada tabel di atas bahwa peningkatan frekuensi akan menurunkan nilai stress yang ada sehingga sudah sesuai dengan pernyataan yang dinyatakan Ozturk (2011) tersebut. Seperti yang dijelaskan sebelumnya, semakin besar mode frekuensinya maka hasil frekuensi alami pada panjang yang berbeda-beda semakin mendekati sama sehingga stress yang dialami pada kedua tipe tersebut akan mendekati sama pula. Gambar 17 menunjukkan bahwa semakin panjang plat struktur yang digetarkan, nilai stress yang dihasilkan semakin besar. Meskipun demikian, semua nilai stress yang dihasilkan masih berada di bawah nilai batas yield strength dan elastic modulus dari struktur tersebut yang besarnya berturut-turut 234.422 MPa dan 193 GPa.
Pada fixed geometry, nilai stress yang dihasilkan rata-rata lebih tinggi dibandingkan dengan fixed hinge. Semua nilai stress yang dihasilkan mendekati namun masih dibawah nilai yield strength dari struktur tersebut. Kemudian untuk mengetahui pengaruh dari faktor bentuk, dilakukan perubahan bentuk seperti pada Gambar 18 yang kemudian disebut plat struktur tipe kedua.
Panjang dibuat menjadi ukuran yang berbeda seperti pada tipe pertama yang kemudian dibandingkan dengan hasil tipe pertama sebelumnya. Pengamatan juga dilakukan dengan melihat jenis fixture yang digunakan. Hal tersebut karena jenis
fixture yang paling mungkin diaplikasikan untuk sistem propulsi kendaraan air
0.0 1.0 2.0 3.0 4.0 5.0 6.0 0.2 0.4 0.6 0.8 M ak sim u m S tre ss ( M P a)
Panjang Plat Struktur (m)
Tipe 1 (Fixed Geometry) Tipe 1 (Fixed Hinge) Tipe 2 (Fixed Geometry) Tipe 2 (Fixed Hinge)
Gambar 17 Hubungan antara panjang plat struktur terhadap maksimum stress yang terjadi
Gambar 18 Hasil simulasi mode pertama tipe kedua (fixed geometry)
adalah jenis fixed hinge (Gambar 10b) dengan penambahan mekanisme penghasil getaran pada bagian pangkal.
Perbandingan antara tipe pertama dengan tipe kedua dapat dilihat pada Gambar 20. Frekuensi alami tipe kedua dengan fixed geometry menunjukkan hasil yang lebih kecil jika dibandingkan tipe pertama pada fixture yang sama. Begitu pula pada tipe kedua dengan fixed hinge yang menghasilkan nilai lebih kecil dibandingkan tipe pertama. Secara umum, tipe pertama masih lebih besar dibandingkan tipe kedua.
0 5 10 15 20 25 30 35 40 45 0.2 0.4 0.6 0.8 Fre k u en si A lam i (R ad /s )
Panjang Plat Struktur (m)
Tipe 1 (Fixed Geometry) Tipe 1 (Fixed Hinge) Tipe 2 (Fixed Geometry) Tipe 2 (Fixed Hinge)
Gambar 19 Hasil simulasi mode pertama tipe kedua (fixed hinge)
Gambar 20 Perbandingan frekuensi alami pada panjang dan tipe yang berbeda
Hal tersebut terjadi karena adanya pengaruh dari bentuk ujung plat yang membesar pada bagian ujungnya. Efek peredaman (damping) pada struktur yang bergetar didapatkan dari fluida yang ada disekitarnya dan nilainya menjadi lebih besar. Aureli et al (2012) menyatakan dalam studinya bahwa pengaruh penambahan massa minimal hanya dihasilkan oleh fenomena konveksi, sedangkan pusaran air dan konveksi sebagai peredaman menjadi lebih dominan sejalan dengan frekuensi dan amplitudo osilasi yang meningkat. Seperti dijelaskan sebelumnya bahwa fixed hinge merupakan tipe penjepit yang paling mungkin dan lebih mudah diterapkan dibandingkan tipe fixed geometry. Dengan melihat hasil frekuensi alami yang dihasilkan bahwa tipe pertama masih lebih besar dari tipe kedua pada jenis fixture tersebut maka tipe pertama masih menjadi pilihan utama dalam perhitungan selanjutnya.
Perhitungan Gaya Dorong (Thrust) yang Dihasilkan
Menurut Lighthill (1971), inersia pada volume yang kecil di dalam fluida yang berada disekitar benda yang bergerak dapat diperhitungkan sebagai komponen utama dalam perhitungan gaya namun efek dari viskositas fluida dapat diabaikan. Dengan pertimbangan tersebut, dilakukan simulasi numerik menggunakan persamaan-persamaan yang digunakan jika ditinjau dari struktur yang digetarkan. Kemudian perhitungan gaya dorong (thrust) dilakukan pada tipe
fixed geometry dengan hasil seperti pada Tabel 8.
Panjang Plat (mm) Displacement (mm) Frekuensi Alami (rad/s) Gaya Dorong T (N) Tipe 1 Tipe 2 Tipe 1 Tipe 2
250 30 41.86 37.48 2.23 1.79 300 35 28.78 26.56 1.43 1.22 350 40 20.97 19.80 0.99 0.89 400 45 15.93 15.32 0.73 0.67 450 50 12.49 12.20 0.55 0.53 500 55 10.02 9.90 0.43 0.42 550 60 8.17 8.18 0.34 0.34 600 65 6.74 6.82 0.27 0.28 650 70 5.60 5.73 0.22 0.23 700 75 4.65 4.81 0.17 0.18 750 80 3.82 4.03 0.13 0.15
Tabel 9 menyajikan nilai gaya dorong yang dihasilkan jika faktor fluida diperhitungkan. Pada kenyataannya, nilai ini akan menjadi lebih efektif dalam mendisain suatu alat propulsi karena adanya gaya aksi reaksi yang menjadikan nilai gaya dorongnya lebih besar.Hal ini menjadi sangat penting saat model diskalakan menjadi ukuran yang lebih besar. Selain itu, bilangan Reynold dapat dijadikan sebagai parameter utama sebagai akibat dari frekuensi struktur yang digetarkan. Seperti yang dilaporkan oleh Chen et al (2010), bilangan Reynold
Tabel 8 Gaya dorong yang dihasilkan tipe pertama (fixed geometry) tanpa fluida
yang dihasilkan akan semakin kecil dengan menurunnya nilai frekuensi alami. Hasil simulasi menunjukkan hasil yang sama dengan pernyataa tersebut.
Semakin panjang plat yang digetarkan, semakin kecil pula gaya dorong yang dihasilkan. Hal tersebut dikarenakan selain faktor bilangan Reynold, faktor lain yang sangat mempengaruhi adalah rasio antara panjang dan lebar dari plat struktur. Penambahan panjang atau lebar akan lebih besar pengaruhnya jika dibandingkan dengan penambahan tebal sehingga ketebalan hampir tidak mempengaruhi pada hasil simulasi. Tipe fixed geometry akan menjadi susah untuk diaplikasikan karena bagian pangkal yang dibuat diam sehingga membutuhkan energi yang lebih besar untuk mencapai frekuensi alaminya. Namun, cara yang masih mungkin dilakukan adalah dengan cara memberikan motor atau sumber penggetar pada bagian ujung plat dengan asumsi bahwa akan ada penambahan massa pada plat struktur yang bergetar.
Tabel 9 Gaya dorong yang dihasilkan tipe pertama (fixed geometry) dalam fluida Panjang Plat (mm) δ (mm) Frekuensi Alami (rad/s) Re λ Gaya Dorong T (N) Tipe 1 Tipe 2 Tipe 1 Tipe 2 Tipe
1 Tipe 2 250 30 41.86 37.48 47209 42274 0.12 5.25 4.21 300 35 28.78 26.56 37868 34951 0.10 4.86 4.14 350 40 20.97 19.80 31528 29767 0.09 4.59 4.09 400 45 15.93 15.32 26949 25921 0.08 4.38 4.05 450 50 12.49 12.20 23467 22920 0.07 4.20 4.01 500 55 10.02 9.90 20712 20476 0.06 4.04 3.95 550 60 8.17 8.18 18429 18442 0.05 3.87 3.88 600 65 6.74 6.82 16475 16670 0.05 3.68 3.77 650 70 5.60 5.73 14734 15071 0.05 3.45 3.61 700 75 4.65 4.81 13100 13570 0.04 3.17 3.40 750 80 3.82 4.03 11477 12105 0.04 2.79 3.10
Bilangan Reynold (Re) dan gaya dorong (T) memiliki hubungan terhadap masing-masing panjang plat struktur. Hal serupa juga telah dilaporkan oleh Facci
et al (2013) yang membuat hubungan antara bilangan Reynold dengan gaya dorong per satuan luas plat dengan hasil yang sama pada tipe fixed geometry.
Faktor viskositas dari fluida menjadi hal yang penting dalam perhitungan tersebut. Kemudian, tekanan yang ada disekitar plat diasumsikan merata disepanjang plat yang bergetar serta gravitasi yang menjadi faktor pembebanan plat struktur ke arah vertikal. Meskipun tidak ada gaya luar yang ditambahkan, parameter tersebut sudah mewakili bahwa hasil yang ditunjukkan merupakan hasil simulasi dalam fluida air pada kedalaman 10 cm dari permukaan. Penentuan kedalaman tersebut didasarkan pada posisi alat penggerak yang akan ditempatkan pada bagian belakang model kendaraan air dengan ketinggian basah 20 cm. Hasil simulasi dan hubungan antara panjang plat struktur terhadap gaya dorong yang dihasilkan dan bilangan Reynold yang ada di sekitar plat struktur tersebut dapat dilihat pada Gambar 21.
Berbeda dengan hasil sebelumnya pada tipe fixed geometry, pada tipe fixed hinge menunjukkan nilai gaya dorong yang dihasilkan lebih kecil pada panjang plat yang sama seperti yang ditunjukkan pada Tabel 10. Meskipun displacement
yang dihasilkan relatif sama, namun frekuensi pada tipe fixed hinge lebih kecil. Jika perhitungan dilakukan tanpa memperhatikan faktor fluida, hasilnya menunjukkan bahwa semakin kecil frekuensi alami maka semakin kecil pula gaya dorong yang dihasilkan.
Panjang Plat (mm) Displacement (mm) Frekuensi Alami (rad/s) Gaya Dorong T (N) Tipe 1 Tipe 2 Tipe 1 Tipe 2
250 30 15.91 9.08 0.32 0.10 300 35 11.95 6.71 0.25 0.08 350 40 9.26 5.19 0.19 0.06 400 45 7.34 4.06 0.15 0.05 450 50 5.96 3.18 0.13 0.04 500 55 4.96 2.47 0.11 0.03 550 60 4.01 1.64 0.08 0.01 600 65 3.05 0.70 0.06 0.003 650 70 2.25 1.38 0.04 0.01 700 75 1.26 1.95 0.01 0.03 750 80 0.59 2.39 0.003 0.05
Ghatkesar et al (2008) mencari hubungan antara mode frekuensi yang semakin tinggi dengan efek viskositas pada fluida yang ada di sekitar plat yang digetarkan. Hasilnya menyatakan bahwa semakin besar mode frekuensi dari
0 5000 10000 15000 20000 25000 30000 35000 40000 45000 50000 0.00 1.00 2.00 3.00 4.00 5.00 6.00 0.2 0.4 0.6 0.8 B ilan g an R ey n o ld ( R e) Gay a Do ro n g T ( N)
Panjang Plat Struktur (m)
Gaya Dorong (T) Tipe 1 Gaya Dorong (T) Tipe 2 Bilangan Reynold (Re) Tipe 1 Bilangan Reynold (Re) Tipe 2
Gambar 21 Hubungan antara panjang plat terhadap gaya dorong (T) dan bilangan Reynold (Re) yang dihasilkan pada tipe fixed geometry
Tabel 10 Gaya dorong yang dihasilkan tipe pertama (fixed hinge) tanpa fluida
getaran maka efek viskositas dari fluida menjadi semakin hilang. Meski demikian, dalam penelitian ini hanya difokuskan pada mode pertama dengan pertimbangan bahwa ukuran panjang plat jauh lebih besar jika dibandingkan lebarnya sehingga mode pertama akan menghasilkan amplitudo paling besar pada ujung plat namun energi paling rendah jika dibandingkan mode-mode selanjutnya. Selain itu, mode pertama akan mendapatkan nilai deformasi pada bahan yang lebih minimum. Gaya dorong dalam fluida pada tipe pertama dengan fixed hinge dapat dilihat pada Tabel 11.
Tabel 11 Gaya dorong yang dihasilkan tipe pertama (fixed hinge) dalam fluida Panjang Plat (mm) δ (mm) Frekuensi Alami (rad/s) Re λ Gaya Dorong T (N) Tipe 1 Tipe 2 Tipe 1 Tipe 2 Tipe
1 Tipe 2 250 30 15.91 9.08 17945 10239 0.12 0.76 0.25 300 35 11.95 6.71 15724 8826 0.10 0.84 0.26 350 40 9.26 5.19 13925 7805 0.09 0.89 0.28 400 45 7.34 4.06 12420 6863 0.08 0.93 0.28 450 50 5.96 3.18 11194 5973 0.07 0.96 0.27 500 55 4.96 2.47 10251 5103 0.06 0.99 0.25 550 60 4.01 1.64 9035 3690 0.05 0.93 0.16 600 65 3.05 0.70 7450 1703 0.05 0.75 0.04 650 70 2.25 1.38 5920 3632 0.05 0.56 0.21 700 75 1.26 1.95 3563 5484 0.04 0.23 0.56 750 80 0.59 2.39 1775 7185 0.04 0.07 1.09
Bilangan Reynold pada tipe fixed hinge di dalam fluida masih menunjukkan penurunan seiring dengan meningkatnya panjang plat yang digetarkan. Namun, berbeda dengan sebelumnya bahwa gaya dorong yang dihasilkan meningkat seiring dengan meningkatnya panjang plat struktur sampai batas maksimum pada panjang plat 500 mm dan menurun kembali pada plat yang lebih panjang seperti ditunjukkan pada Gambar 22.
Pada tipe fixed hinge, penurunan bilangan Reynold terjadi perlahan dibawah nilai bilangan Reynold pada fixed geometry yang memiliki penurunan lebih besar sedangkan pembaginya sama. Dapat dilihat bahwa panjang plat 500 mm merupakan nilai maksimum gaya dorong sebesar 0.99 N, sedangkan pada panjang 550 mm turun menjadi 0.93 N dan seterusnya menurun. Jika dibandingkan dengan tipe kedua, tipe pertama masih memiliki nilai gaya dorong yang lebih besar kecuali pada panjang 700 dan 750 yang menunjukkan nilai yang meningkat kembali. Hal tersebut dimungkinkan karena adanya peningkatan frekuensi sehingga meningkatkan bilangan Reynold pada panjang plat tersebut. Namun demikian, pada aplikasinya panjang plat struktur diusahakan tidak melebihi setengah dari panjang kendaraan air yang dirancang. Sehingga dapat dilihat bahwa panjang plat struktur 500 mm memiliki potensi yang cukup besar jika dibandingkan dengan nilai gaya dorong pada panjang plat struktur yang lainnya.
Perhitungan Resistansi (RT) pada Kendaraan Air
Parameter yang paling penting yang berkaitan dengan kendaraan air adalah koefisien gaya hambat dalam air yang berkaitan dengan nilai bilangan Reynold (Re), rasio antara panjang dan lebar kendaraan air, serta karakteristik dari air dan permukaan badan kendaraan air tersebut. Untuk mengetahui nilai gaya hambat yang dihasilkan, kecepatan dibuat berbeda-beda. Chen et al (2010) melakukan simulasi pada penggerak biomimetik robot ikan menggunakan komposit ionic polymer-metal sebagai ekor penggeraknya. Parameter permukaan basah yang digunakan adalah 218 x 10-4 m2, massa jenis air 1000 kg/m3, dan koefisien gaya hambat 0.12. Hasilnya menunjukkan bahwa robot ikan dapat bergerak melawan resistansi dari air dengan kecepatan sekitar 0.02 m/s.
Vs (m/s) ρ air (kg/m3) ReL CF S (m2) RT (N) t 0.1 1000 124844 0.0078 0.72 0.03 0.96 0.2 1000 249688 0.0065 0.72 0.09 0.89 0.3 1000 374532 0.0059 0.72 0.19 0.79 0.4 1000 499376 0.0055 0.72 0.32 0.66 0.5 1000 624220 0.0052 0.72 0.47 0.51 0.6 1000 749064 0.0050 0.72 0.65 0.35 0.7 1000 873908 0.0048 0.72 0.85 0.08 0.8 1000 998752 0.0047 0.72 1.08 -0.44 0.9 1000 1123596 0.0046 0.72 1.33 -1.39 1.0 1000 1248439 0.0045 0.72 1.61 -5.87 1.1 1000 1373283 0.0044 0.72 1.91 -27.57 0 5000 10000 15000 20000 25000 30000 35000 40000 45000 50000 0.00 1.00 2.00 3.00 4.00 5.00 6.00 0.2 0.4 0.6 0.8 B ilan g an R ey n o ld ( R e) Gay a Do ro n g T ( N)
Panjang Plat Struktur (m)
Gaya Dorong (T) Tipe 1 Gaya Dorong (T) Tipe 2 Bilangan Reynold (Re) Tipe 1 Bilangan Reynold (Re) Tipe 2
Gambar 22 Hubungan antara panjang plat terhadap gaya dorong T dan bilangan Reynold (Re) yang dihasilkan pada tipe fixed hinge
Tabel 12 Hasil perhitungan gaya resistansi kendaraan air pada kecepatan yang berbeda.
Bilangan Reynold (ReL) pada perhitungan gaya hambat merupakan jenis
aliran yang mengalir di sepanjang badan kapal. Semakin tinggi kecepatan maju kendaraan air, semakin besar pula nilai bilangan Reynold-nya. Sedangkan nilai koefisien gesekan (CF) merupakan fungsi dari bilangan Reynold-nya.
Seperti ditunjukkan pada Tabel 12 di atas, kecepatan yang diharapkan pada kendaraan air dibuat berubah-ubah untuk mengetahui batas kecepatan yang masih mungkin dapat dihasilkan. Gaya hambat pada kecepatan 0.8 m/s adalah 1.08 N yang sudah melebihi batas gaya dorong yang dihasilkan plat struktur sebelumnya dan meningkat pada kecepatan yang lebih tinggi. Perhitungan gaya hambat (RT)
diatas tanpa memperhitungkan penambahan hambatan akibat sistem penggerak sebesar t. Hal tersebut dengan pertimbangan bahwa hasil simulasi frekuensi pada plat struktur yang mempengaruhi nilai gaya dorong yang dihasilkan sudah memasukkan faktor-faktor tekanan air dan gravitasi. Perhitungan nilai hambatan tambahan (t) hanya dilakukan untuk melihat nilai dimana gaya hambat kendaraan air masih dapat diatasi oleh gaya dorong sistem penggerak. Berdasarkan hasil perhitungan di atas, dapat diketahui bahwa nilai t negatif berarti bahwa gaya dorong (thrust) tidak dapat mengatasi gaya hambat pada badan kendaraan air dengan kecepatan sebesar Vs. Grafik hubungan antara kecepatan maju dan
resistansi kendaraan air ditunjukkan pada Gambar 23. Seperti penelitian-penelitian sebelumnya bahwa nilai resistansi kendaraan air merupakan fungsi kuadratik dari kecepatan majunya.
Kemudian hasil perhitungan gaya resistansi pada kecepatan yang berbeda-beda tersebut diinterpolasi untuk mengetahui batas kecepatan yang masih bisa diatasi oleh gaya dorong yang dihasilkan masing-masing plat struktur seperti pada Tabel 13. Kecepatan maksimum yang masih mungkin bisa diatasi juga merupakan faktor penentu pemilihan ukuran yang paling baik dalam perancangan alat penggerak berbasis getaran struktur ini.
0.0 0.5 1.0 1.5 2.0 2.5 0 0.5 1 1.5 R esis tan si k en d ar aa n air R T (N) Kecepatan maju Vs (m/s)
Gambar 23 Hubungan antara kecepatan maju dengan resistansi kendaraan air
Vs (m/s) RT (N) Panjang Plat L (m) T (N) Frekuensi (rad/s) T/L (N/m) Vs’ Hasil Interpolasi 0.1 0.03 0.250 0.76 15.91 3.0325 0.66 0.2 0.09 0.300 0.84 11.95 2.7938 0.69 0.3 0.19 0.350 0.89 9.26 2.5563 0.72 0.4 0.32 0.400 0.93 7.34 2.3241 0.74 0.5 0.47 0.450 0.96 5.96 2.1238 0.77 0.6 0.65 0.500 0.99 4.96 1.9791 0.79 0.7 0.85 0.550 0.93 4.01 1.6911 0.76 0.8 1.08 0.600 0.75 3.05 1.2544 0.65 0.9 1.33 0.650 0.56 2.25 0.8580 0.55 1.0 1.61 0.700 0.23 1.26 0.3347 0.33 1.1 1.91 0.750 0.07 0.59 0.0890 0.16
Kecepatan yang masih mungkin diatasi berada pada rentang 0.66 m/s sampai 0.79 m/s. Pada penelitian ini akan dicari nilai gaya dorong yang maksimum dengan kecepatan yang maksimum sehingga panjang plat 500 mm merupakan nilai kecepatan tertinggi diantara yang lainnya dengan gaya dorong yang paling tinggi pula.
Frekuensi dari masing-masing panjang plat jika dihubungkan dengan gaya dorong yang dihasilkan per satuan panjang plat struktur dapat dilihat pada Gambar 24. Hasilnya menunjukkan bahwa semakin tinggi nilai frekuensi alaminya maka semakin tinggi pula nilai gaya dorong per satuan panjang dari plat struktur yang digetarkan sebagai fungsi logaritmik.
y = 0.9861 ln(x) + 0.3077 R² = 0.9756 0.0 0.5 1.0 1.5 2.0 2.5 3.0 3.5 0 5 10 15 20 T/ L Frekuensi (rad/s)
Tabel 13 Hasil interpolasi kecepatan maju kendaraan air pada setiap panjang plat struktur
Gambar 24 Hubungan antara frekuensi dengan gaya dorong per panjang plat struktur
Perhitungan Energi Kinetik
Ketika defleksi maksimum dari titik kesetimbangan terjadi pada gerak harmonik, semua bagian dari plat struktur adalah diam (dalam waktu yang singkat). Pada saat itu, semua bentuk energi dihubungkan dengan getaran dalam bentuk energi elastisic-strain. Ketika suatu plat struktur melewati titik kesetimbangannya semua energi dalam getaran dihitung dalam bentuk energi kinetik. Energi kinetik pada getaran struktur merupakan fungsi dari frekuensi alami dan momen inersia massa dari plat struktur yang digetarkan. Momen inersia massa dari plat struktur merupakan fungsi dari massa dan panjang plat struktur. Massa jenis plat struktur adalah 8000 kg/m3 dan lebar serta tebal konstan berturut-turut 30 mm dan 0.5 mm. Hasil perhitungan energi kinetik getaran per satuan massa pada plat struktur dilakukan pada tipe fixed hinge dan energi kinetik translasi dari kendaraan air per satuan massa yang bergerak dapat dilihat pada Tabel 14. Panjang (mm) Vs’ (m/s) Frekuensi (rad/s) Momen Inersia (kg.m2) EKV/m1 (Joule/kg) EKT/m2 (Joule/kg) Indeks 250 0.66 15.91 0.00063 2.637 0.215 12.289 300 0.69 11.95 0.00108 2.142 0.241 8.887 350 0.72 9.26 0.00172 1.751 0.257 6.817 400 0.74 7.34 0.00256 1.438 0.272 5.277 450 0.77 5.96 0.00365 1.197 0.300 3.989 500 0.79 4.96 0.00500 1.024 0.313 3.271 550 0.76 4.01 0.00666 0.809 0.287 2.816 600 0.65 3.05 0.00864 0.558 0.211 2.638 650 0.55 2.25 0.01099 0.356 0.152 2.347 700 0.33 1.26 0.01372 0.130 0.055 2.371 750 0.16 0.59 0.01688 0.033 0.013 2.430
Ket.: EKV/m1 = Energi kinetik getaran per satuan massa plat struktur
EKT/m2 = Energi kinetik translasi (kendaraan air) per satuan massa kendaraan air
Indeks energi kinetik yang dihasilkan cenderung menurun seiring dengan menurunnya frekuensi dan kecepatan maju kendaraan air dan meningkat kembali seiring dengan peningkatan kecepatan maju kendaraan air meskipun dengan frekuensi yang lebih rendah. Meski demikian, pada tipe fixture ini hasil gaya dorong yang dihasilkan meningkat sampai pada batas panjang plat struktur 500 mm dan kemudian menurun kembali. Perhitungan energi kinetik getaran dari struktur per satuan massa struktur tersebut dilakukan untuk mengetahui seberapa besar energi kinetik tersebut jika dibandingkan dengan energi kinetik translasi pada kendaraan air. Sehingga pada penelitian ini dilakukan perhitungan dua energi kinetik yang berbeda. Energi kinetik translasi (EKT) merupakan fungsi dari
kendaraan airnya sedangkan energi kinetik vibrasi (EKV) merupakan fungsi dari
plat struktur yang bergetar sebagai alat penggeraknya. Indeks atau perbandingan kedua energi kinetik tersebut diharapkan memiliki nilai yang rendah dengan pemikiran bahwa semakin kecil nilai indeks-nya maka semakin besar pula energi kinetik translasi yang bisa diatasi oleh energi kinetik translasi dari kendaraan air tersebut sehingga energinya minimum. Nilai terendah berada pada panjang plat
700 mm sedangkan pada panjang plat dengan nilai gaya dorong tertinggi yakni 500 mm memiliki indeks 3.271. Jika dibandingkan, perubahan gaya dorong tidak sebanding dengan perubahan indeks energi kinetiknya sehingga panjang plat 500 mm tetap menjadi pilihan utama. Hubungan antara panjang plat struktur dengan kecepatan maju (Vs) dan indeks energi kinetik dapat dilihat pada Gambar 25.
SIMPULAN DAN SARAN
Simpulan
Pemodelan dan simulasi pada sistem penggerak dengan menggunakan getaran struktur telah selesai dilakukan. Hasilnya menunjukkan bahwa bahan yang dipilih adalah stainless steel dengan bentuk plat berukuran panjang, lebar, dan tebal berturut-turut 500 mm, 30 mm, dan 0.5 mm. Hal tersebut didasarkan pada nilai stress yang masih relatif kecil yakni 2.0721 MPa, namun gaya dorong yang besar yakni 0.99 N. Sistem penggerak ini dapat menggerakkan model (melawan resistansi) kendaraan air tipe fishing craft dengan kecepatan maksimum 0.79 m/s pada panjang plat tersebut. Selain itu, indeks energi kinetik yang relatif kecil yakni 3.271 pada kecepatan maksimum tersebut.
Saran
Perlu adanya analisis tingkat lanjut dalam simulasi interaksi antara plat struktur dengan aliran fluida menggunakan CFD atau menu Flow Simulation pada Solidowrks. Selain itu, perlu adanya pengukuran secara langsung terhadap plat struktur yang bergetar di dalam air sehingga semakin sedikit asumsi yang digunakan untuk mendukung kebenaran hasil simulasi yang didapatkan.
0.0 2.0 4.0 6.0 8.0 10.0 12.0 14.0 0.00 0.10 0.20 0.30 0.40 0.50 0.60 0.70 0.80 0.90 0.2 0.4 0.6 0.8 In d ek s Vs ( m /s )
Panjang Plat Struktur (m) Kecepatan Maju (m/s)
Indeks Energi Kinetik
Gambar 25 Hubungan antara panjang plat struktur dengan kecepatan maju kendaraan air dan indeks energi kinetik
DAFTAR PUSTAKA
Adji WS. 2005. Engine Propeller Matching. Institut Teknologi Sepuluh Nopember, Surabaya.
Aureli M, Pagano C, dan Porfiri M. 2012. Torsional vibration of sharp-edged beams under water. Mechanics of Nano, Micro and Macro Composite Structures, 18-20 Juni 2012, USA.
Chen Z. 2010. Modeling of biomimetic robotic fish propelled by an ionicpolymer-metal composite caudal fin. IEEE/ASME Transactions on Mechatronics, Vol. 15, No. 3, June 2010.
Dieter GE. 1991. Engineering Design : A Material and Processing Approach. McGraw-Hill, Inc., New York.
Facci AL dan Porfiri M. 2013. Analysis of three-dimensional effect in oscillating cantilevers immersed in viscous fluids. Journal of Fluids and Structures 38 (2013) 205-222.
Ghatkeshar MK, Braun T, Barwich V, dan Ramseyer JP. 2008. Resonating modes of vibrating microcantilevers in liquid. Applied Physics Letter 92, 043106 (2008).
Hadi ES. dan Budiarto U. 2012. Kajian Teknis Propeller- Engine Matching pada Kapal Ikan Tradisional dengan Menggunakan Motor Listrik Hybrid dari Solar Cell dan Genset sebagai mesin penggerak utama kapal di Kabupaten Pasuruan Jawa Timur. Universitas Diponegoro, Semarang.
Kelly SG. 2012. Mechanical Vibration : Theory and Applications. Cengage Learning, Stamford USA.
Lighthill M. 1971. Large-amplitude elongated-body theory of fish locomotion. [Proceeding] The Royal Society of London, Biological Sciences 179, 125-138. Mackean D G. 2014. Biological Drawings of Fish Swimming. Biology Teaching
and Learning Resources [Internet]. [diunduh 20 Maret 2014]. Tersedia pada: http://www.biology-resources.com.
Martin GH. 1982. Kinematika dan Dinamika Teknik. Setiyobakti, penerjemah. Jakarta : Penerbit Erlangga. Terjemahan dari : Kinematics and Dynamics of Machines. Ed ke-2.
Nursall JR. 1979. Swimming and the origin of paired appendages. In: Milton S. Love and Gregor M. Cailliet (eds), Reading in Ichthyology. Prentice-Hall of India. New Delhi.
Ozturk. 2011. In-plane free vibration of a pre-stresssed curved beam obtained from a large deflected cantilever beam. Finite Elements in Analysis and Design
47 (2011) 229-236.
Riesch C, Reichel EK, Keplinger F., dan Jokoby B. 2008. Characterizing vibrating cantilever for liquid viscosity and density sensing. Hindawi Publishing Corporation, Journal of Sensors Vol. 2008 ID 697062, 9 pages. Riley WF. and Sturges LD. 1993. Engineering Mechanics: Dynamics. John Wiley
& Sons, Inc., New York.
Rogenstad. 1999. References values for ship pollution. [Technical report]. Det Norske Veritas, The Research Council of Norwey.
Sader JE. 1998. Frequency response of cantilever beams immersed in viscous fluids with applications to the atomic force microscope. Journal of Applied Physics, Vol. 84, No. 1.