Hello!
I am Fazatia Aidila 1212100095I am here to give presentation as a requirement for my final project
Supervisor
Drs. M. Setijo Winarko, M.Si Drs. Lukman Hanafi, M.Sc
Jurusan Matematika
Fakultas MIPA Institut Teknologi Sepuluh Nopember Surabaya 2016
Analisa Kualitatif
pada Model SIR
dengan Fungsi
Latar Belakang
Campak, Gondong, Cacar, Polio,
Influenza Model Matematika
SIR Keterlambatan
Pengobatan
Analisa Kualitatif pada Model SIR dengan
Fungsi Pengobatan Saturasi
“
▧ Bagaimana menentukan bilangan reproduksi dasar, kestabilan dari titik kesetimbangan bebas penyakit dan endemik dari model dan adanya bifurkasi mundur serta menganalisa bifurkasi terutama bifurkasi Hopf?
▧ Bagaimana intepretasi hasil analisis dari model epidemik tipe SIR dan penyelesaian numerik dari model tersebut serta simulasinya
Batasan Masalah
Permasalahan yang dibahas pada Tugas Akhir ini akan dibatasi pada model epidemi SIR dengan fungsi pengobatan saturasi yang dinyatakan dengan 𝑇 𝐼 = 𝛼+𝐼𝑟𝐼
1. Menentukan bilangan reproduksi dasar, kestabilan dari titik kesetimbangan bebas penyakit dan kesetimbangan endemik dari model dan adanya bifurkasi mundur serta menganalisa bifurkasi terutama bifurkasi Hopf
Tujuan
2. Mengintepretasikan hasil analisis model epidemi tipe SIR dan penyelesaian numerik dari
model tersebut serta
1. Mengetahui dinamika penyebaran penyakit model epidemi tipe SIR yang dipengaruhi fungsi pengobatan saturasi
Manfaat
2. Diperoleh pengetahuan dalam mengintrepetasikan hasil analisis dan simulasi pada model epidemi tipe SIR
Penelitian Terkait
Analisa Kualitatif pada Model SIS dengan Pengobatan (2013)
Pada penelitian tersebut terjadi bifurkasi mundur pada saat 𝑅0 < 1 yang menunjukkan bahwa pada saat 𝑅0 < 1
kapasitas pengobatan yang diberikan kurang efektif sehingga menyebabkan masih ada individu yang terinfeksi dan penyakit akan menjadi endemik
Analisis Kestabilan dan Bifurkasi Mundur pada Model Infeksi Virus Hepatitis B dan C pada Tubuh Pasien (2015)
Pada Tugas Akhir tersebut terjadi bifurkasi mundur pada saat 𝑅0 < 1 yang menunjukkan bahwa transplantasi hati sebagai bentuk pengobatan ternyata
kurang efektif dalam
menghilangkan virus hepatitis dalam tubuh
Bilangan reproduksi dasar (𝑅0) merupakan suatu parameter
yang digunakan untuk mengetahui tingkat penyebaran suatu penyakit. Kondisi yang akan timbul sebagai berikut
▧ Jika 𝑅0 < 1 , maka penyakit akan menghilang dalam populasi
▧ Jika 𝑅0 = 1, maka penyakit akan menetap dalam populasi ▧ Jika 𝑅0 > 1 , maka penyakit akan meningkat menjadi
wabah dalam populasi
Titik Kesetimbangan
Pandang persamaan diferensial sebagai berikut:
𝑑𝑥
𝑑𝑡 = 𝑓(𝑥, 𝑦) 𝑑𝑦
𝑑𝑡 = 𝑔(𝑥, 𝑦)
(2.1)
Sebuah titik 𝑥0, 𝑦0 merupakan titik kesetimbangan dari persamaan
(2.1) jika memenuhi 𝑓 𝑥0, 𝑦0 = 𝑔 𝑥0, 𝑦0 = 0 . Karena turunan
suatu konstanta sama dengan nol, maka sepasang fungsi konstan. 𝑥 𝑡 = 𝑥0
dan
𝑦 𝑡 = 𝑦0
adalah penyelesaian kesetimbangan dari persamaan (2.1) untuk semua 𝑡.
Kestabilan Asimtotik Lokal
Kestabilan asimtotik lokal merupakan kestabilan dari sistem linear atau kestabilan dari linearisasi sistem tak linear. Kestabilan asimtotik lokal pada titik kesetimbangan ditentukan oleh tanda pada bagian real dari akar-akar karakteristik sistem.
Persamaan Karakteristik
𝜆2 − 𝜆 𝑎 + 𝑑 + 𝑎𝑑 − 𝑏𝑐 = 0 (2.2)
Diperoleh nilai eigen sebagai berikut
𝜆1,2 = 𝑎+𝑑 ± 𝑎+𝑑 2−4 𝑎𝑑−𝑏𝑐 . 2
Dalam hal ini 𝜆1 + 𝜆2 = 𝑇𝑟 𝐽 , 𝜆1. 𝜆2 = 𝑑𝑒𝑡(𝐽) dan ∆ = 𝑇𝑟 𝐽 − 4 det(𝐽) sehingga persamaan (2.2) dapat dinyatakan sebagai
𝜆2 − 𝑇𝑟(𝐽)𝜆 + 𝑑𝑒𝑡(𝐽) = 0 (2.3)
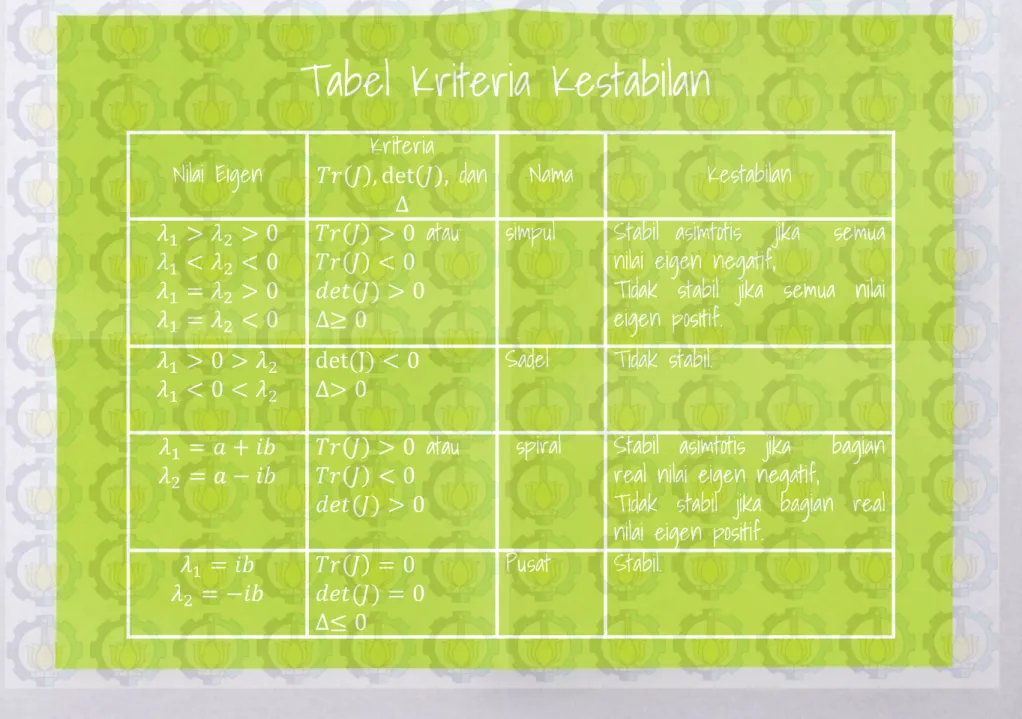
Tabel Kriteria Kestabilan
Nilai Eigen 𝑇𝑟 𝐽 , det 𝐽 ,Kriteria dan ∆ Nama Kestabilan 𝜆1 > 𝜆2 > 0 𝜆1 < 𝜆2 < 0 𝜆1 = 𝜆2 > 0 𝜆1 = 𝜆2 < 0 𝑇𝑟 𝐽 > 0 atau 𝑇𝑟 𝐽 < 0 𝑑𝑒𝑡(𝐽) > 0 ∆≥ 0
simpul Stabil asimtotis jika semua nilai eigen negatif,
Tidak stabil jika semua nilai eigen positif.
𝜆1 > 0 > 𝜆2
𝜆1 < 0 < 𝜆2
det(J) < 0
∆> 0 Sadel Tidak stabil. 𝜆1 = 𝑎 + 𝑖𝑏
𝜆2 = 𝑎 − 𝑖𝑏
𝑇𝑟 𝐽 > 0 atau 𝑇𝑟 𝐽 < 0
𝑑𝑒𝑡(𝐽) > 0
spiral Stabil asimtotis jika bagian real nilai eigen negatif,
Tidak stabil jika bagian real nilai eigen positif.
𝜆1 = 𝑖𝑏 𝜆2 = −𝑖𝑏 𝑇𝑟 𝐽 = 0 𝑑𝑒𝑡(𝐽) = 0 ∆≤ 0 Pusat Stabil.
Bifurkasi Mundur
Kurva Bifurkasi Mundur mempunyai titik kesetimbangan bebas penyakit yang stabil serta 2 titik kesetimbangan endemik yang tidak stabil dan stabil ketika 𝑅0 < 1 .
Sedangkan ketika 𝑅0 > 1
kurva mempunyai titik kesetimbangan bebas penyakit tidak stabil dan titik kesetimbangan endemik yang stabil.
Bifurkasi Hopf
Teorema 2.2
Diberikan suatu sistem dinamik
𝑥 = 𝑓 𝑥, 𝑦, 𝜇
𝑦 = 𝑔 𝑥, 𝑦, 𝜇 (2.4)
dimana μ merupakan parameter dengan 𝑓 0,0, 𝜇 = 0 dan 𝑔 0,0, 𝜇 = 0
andaikan syarat berikut terpenuhi Matriks Jacobian 𝐽 = 𝜕𝑓 𝜕𝑥 𝜕𝑓 𝜕𝑦 𝜕𝑔 𝜕𝑥 𝜕𝑦 𝜕𝑦
yang dihitung pada titik kesetimbangan x, y = (0,0) pada saat μ = 0
mempunyai sepasang eigen value imaginer murni.
Jika eigen value 𝜆 𝜇 = 𝑎 𝜇 ± 𝑖𝛽(𝜇) dengan 𝑎 0 = 0 dan 𝛽(0) ≠ 0) dari
titik (0,0) berlaku syarat transversal sebagai berikut
𝑑
Indeks Stabilitas
Stabilitas dari orbit priodik dicari dengan menggunakan rumus berikut
𝛤 = 1 16 𝜕3𝑓 𝜕𝑥3 + 𝜕3𝑔 𝜕𝑥2𝜕𝑦 + 𝜕3𝑓 𝜕𝑥𝜕𝑦2 + 𝜕3𝑔 𝜕𝑦3 + 1 16𝐷 𝜕2𝑓 𝜕𝑥𝜕𝑦 𝜕2𝑓 𝜕𝑥2 + 𝜕2𝑓 𝜕𝑦2 − 𝜕2𝑔 𝜕𝑥𝜕𝑦 𝜕2𝑔 𝜕𝑥2 + 𝜕2𝑔 𝜕𝑦2 − 𝜕2𝑓 𝜕𝑥2 𝜕2𝑔 𝜕𝑥2 + 𝜕2𝑓 𝜕𝑦2 𝜕2𝑔 𝜕𝑦2
yang disebut indeks stabilitas dan dihitung pada titik (0,0) dengan μ = 0. Jika Γ > 0 orbit periodik tak stabil dan jika Γ < 0 maka orbit periodik stabil.
Metode Runge Kutta
Persamaan diferensial (2.1) 𝑑𝑥 𝑑𝑡 = 𝑓 𝑥, 𝑦 𝑑𝑦 𝑑𝑡 = 𝑔 𝑥, 𝑦dapat diselesaikan dengan metode numerik Runge-Kutta, sehingga didapat penyelesaian numerik dalam bentuk persamaan (i) dan (ii) sebagai berikut
𝑥𝑛+1 = 𝑥𝑛+1 6(𝑘1,𝑥 + 2𝑘2,𝑥+ 2𝑘3,𝑥 + 𝑘4,𝑥) (i) dengan 𝑘1,𝑥 = 𝑓 (𝑡𝑛, 𝑥𝑛) 𝑘2,𝑥 = 𝑓(𝑡𝑛+ 2, 𝑥𝑛 + 𝑘1,𝑥 2 ) 𝑘3,𝑥 = 𝑓(𝑡𝑛+ 2, 𝑥𝑛 + 𝑘2,𝑥 2 ) 𝑘4,𝑥 = 𝑓(𝑡𝑛 + , 𝑥𝑛 + 𝑘3,𝑥) 𝑦𝑛+1 = 𝑦𝑛 + 1 6(𝑘1,𝑦 + 2𝑘2,𝑦+ 2𝑘3,𝑦 + 𝑘4,𝑦) (ii) dengan 𝑘1,𝑦 = 𝑓 (𝑡𝑛, 𝑦𝑛) 𝑘2,𝑦 = 𝑓(𝑡𝑛+ 2, 𝑦𝑛 + 𝑘1,𝑦 2 ) 𝑘3,𝑦 = 𝑓(𝑡𝑛 + 2, 𝑦𝑛 + 𝑘2,𝑦 2 ) 𝑘4,𝑦 = 𝑓(𝑡𝑛 + , 𝑦𝑛 + 𝑘3,𝑦)
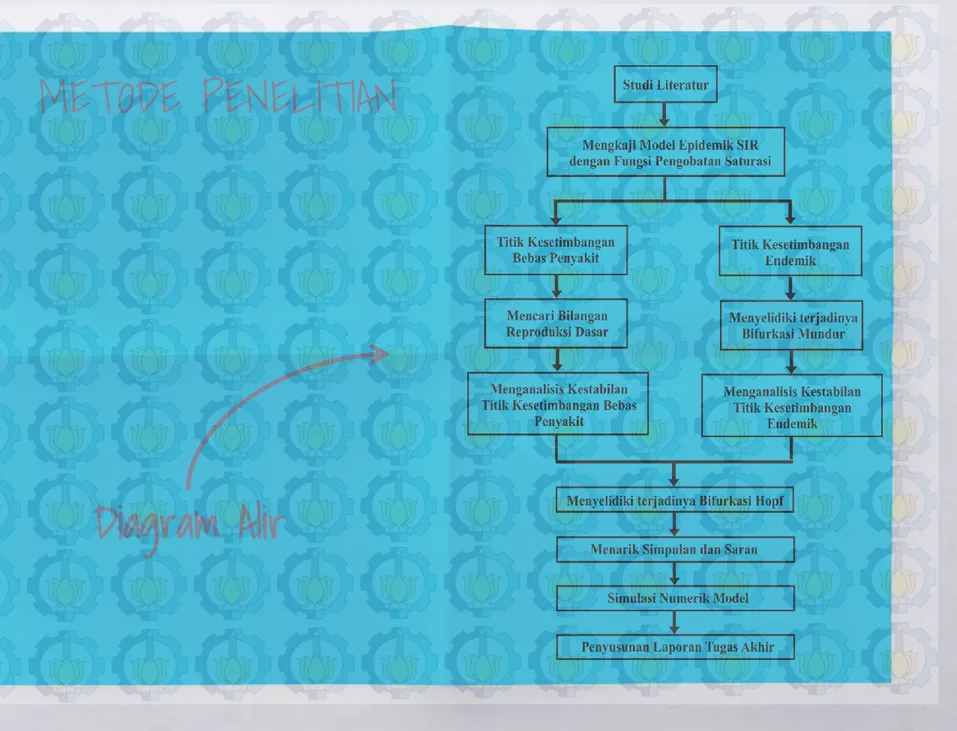
Diagram Alir
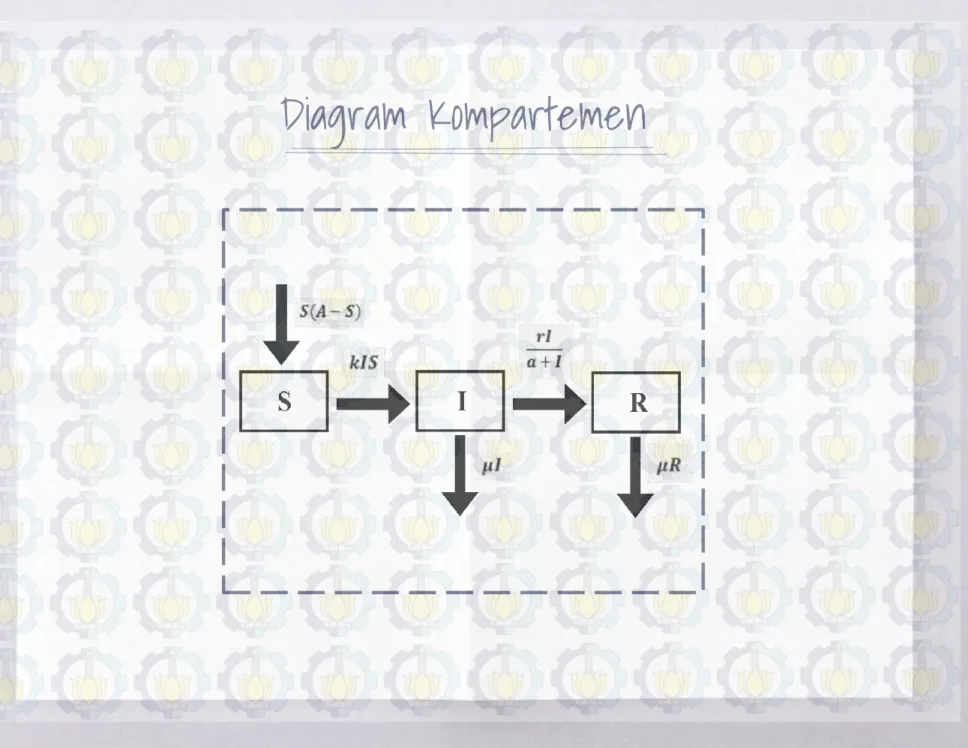
Model Epidemi SIR dengan Fungsi Pengobatan
Saturasi
Model epidemi setelah direduksi
𝑑𝑆 𝑑𝑡 = 𝑆 𝐴 − 𝑆 − 𝑘𝐼𝑆 𝑑𝐼 𝑑𝑡 = 𝑘𝐼𝑆 − 𝜇𝐼 − 𝑟𝐼 𝑎+𝐼 (4.2) dengan kondisi awal
𝑆 0 > 0, 𝐼 0 > 0 Model epidemi SIR dengan fungsi
pengobatan saturasi 𝑑𝑆 𝑑𝑡 = 𝑆 𝐴 − 𝑆 − 𝑘𝐼𝑆 𝑑𝐼 𝑑𝑡 = 𝑘𝐼𝑆 − 𝜇𝐼 − 𝑟𝐼 𝑎+𝐼 (4.1) 𝑑𝑅 𝑑𝑡 = 𝑟𝐼 𝑎+𝐼 − 𝜇𝑅
Daerah Penyelesaian
Daerah untuk sistem Persamaan (4.1) adalah
𝛺 = 0 ≤ 𝑆 𝑡 ≤ 𝑀1, 0 ≤ 𝑆 𝑡 + 𝐼 𝑡 + 𝑅 𝑡 ≤ 𝐴+𝜇
𝜇 𝑀1, 𝐼 𝑡 ≥ 0, 𝑅(𝑡) ≥ 0
karena kondisi awal bernilai positif maka 𝛺 merupakan daerah invarian positif yang artinya semua penyelesaian berada di dalam 𝛺.
Titik Kesetimbangan Bebas Penyakit dan Bilangan
Reproduksi Dasar
Titik Kesetimbangan Bebas Penyakit
𝐸1 = 𝑆0, 𝐼0 = 𝐴, 0
Bilangan Reproduksi Dasar
𝑅0 = 𝑘𝐴 𝜇+𝑟
𝛼
Kestabilan Titik Kesetimbangan Bebas Penyakit
Teorema 4.3.1
Titik bebas penyakit 𝐸1 stabil asimtotis lokal jka 𝑅0 < 1 dan tidak stabil
jika 𝑅0 > 1. Bukti :
Berdasarkan nilai eigen yang telah diperoleh pada sistem (4.2)
𝜆3 < 0 , dan 𝜆4 < 0 ⟺ 𝜇 + 𝑟 𝛼 𝑅0 − 1 < 0 ⟺ 𝑅0 − 1 < 0 ⟺ 𝑅0 < 1
hal ini membuktikan jika 𝑅0 < 1 maka titik kesetimbangan bebas
penyakit 𝐸1= 𝐴, 0 stabil asimtotis lokal, sebaliknya jika 𝑅0 > 1 titik
Titik Kesetimbangan Endemik
Titik Kesetimbangan Endemik
Berdasarkan Persamaan (4.2) diperoleh
𝑆2 − 𝛼𝑘 + 𝐴 +𝑢 𝑘 𝑆 + 𝑢 𝑘 𝛼𝑘 + 𝐴 + 𝑟 = 0 (4.20) dengan 𝑅0 ≥ 1 − 𝛼2𝑘2+𝑟 𝜇𝛼+𝑟 + 2𝛼𝑘 𝑟 𝜇𝛼+𝑟 ≔ 𝑝0
diperoleh penyelesaian positif dari (4.20)
𝑆1 = 𝛼𝑘+𝐴+ 𝑢 𝑘+ ∆ 2 dan 𝑆2 = 𝛼𝑘+𝐴+𝑢 𝑘− ∆ 2
Selanjutnya jika 𝑆1 < 𝐴 maka 𝑅0 > 1 + 𝛼2𝑘2−𝑟
𝜇𝛼+𝑟 ≔ 𝑝1 dan 𝑅0 < 1
dan jika 𝑆2 < 𝐴 maka 𝑅0 > 1 + 𝛼2𝑘2−𝑟
Titik Kesetimbangan Endemik
Perhatikan bahwa 𝛼𝑘 < 𝑟 ekivalen dengan 𝑝1 < 1.
Sehingga ketika 𝑅0 ≥ 𝑝0, dapat disimpulkan
▧ Jika 𝛼𝑘 < 𝑟, maka sistem (4.2) memiliki dua titik kesetimbangan
endemik 𝐸1 = (𝑆1, 𝐼1) dan 𝐸2 = (𝑆2, 𝐼2) pada saat 𝑅0 < 1.
▧ Jika 𝛼𝑘 < 𝑟, maka sistem (4.2) memiliki titik kesetimbangan endemik
tunggal 𝐸2 = (𝑆2, 𝐼2) pada saat 𝑅0 > 1, dan titik kesetimbangan
endemik 𝐸1 tidak ada karena 𝑝1 < 𝑅0 < 1 tidak berlaku.
▧ Misalkan 𝛼𝑘 ≥ 𝑟, maka 𝑝1 ≥ 1, sehingga titik kesetimbangan
endemik 𝐸1 tidak ada. Kemudian ketika 𝑅0 > 1 terdapat titik
kesetimbangan endemik tunggal 𝐸2 = 𝑆2, 𝐼2 dan tidak ada titik
Teorema 4.4.1
Pada sistem Persamaan (4.2) terjadi bifurkasi mundur dengan titik kesetimbangan endemik 𝑬𝟏 dan 𝑬𝟐 pada saat 𝑹𝟎 < 𝟏 dan
𝜶𝒌 < 𝒓
Kestabilan Titik Kesetimbangan Endemik
▧ Kestabilan Titik Kesetimbangan Endemik untuk 𝑅0 = 𝑅𝑐 𝐸0 = 𝑆0, 𝐼0 = 𝐴+𝛼𝑘+ 𝜇 𝑘 2 , 𝐴−𝛼𝑘−𝜇 𝑘 2
diperoleh 𝑑𝑒𝑡(𝐽(𝐸0) < 0 sehingga 𝐸0 tidak stabil (saddle)
▧ Kestabilan Titik Kesetimbangan Endemik untuk 𝑅𝑐 < 𝑅0 < 1 𝐸1 = (𝑆1, 𝐼1) = 𝐴+𝛼𝑘+𝜇 𝑘+ ∆ 2 , 𝐴−𝛼𝑘−𝜇 𝑘− ∆ 2𝑘
diperoleh 𝑑𝑒𝑡(𝐽(𝐸1) < 0 sehingga 𝐸1 tidak stabil (saddle)
𝐸2 = 𝑆2, 𝐼2 = 𝐴+𝛼𝑘+ 𝜇 𝑘− ∆ 2 , 𝐴−𝛼𝑘−𝜇 𝑘+ ∆ 2𝑘
diperoleh 𝑑𝑒𝑡(𝐽 𝐸2 > 0 sehingga 𝐸2 merupakan simpul atau spiral.
Kemudian didapat 𝑡𝑟 𝐽 𝐸2 = 𝑟𝐼2
Kestabilan Titik Kesetimbangan Endemik
selanjutnya misalkan (𝐻1) ∆44= 𝑘 − 1 𝐴 − 𝜇 + 𝛼𝑘 2 +4𝛼𝐴 1 − 𝑘 𝑘 > 0 dan didefinisikan 𝐻 ≜ 𝛼𝑘2 𝑘−1− 𝜇 𝑘 𝑘−1 − 𝑘−1 𝐴−𝜇+𝛼𝑘(𝑘−1)2+4𝛼𝐴 1−𝑘 𝑘maka kestabilan titik kesetimbangan endemik 𝐸2 dinyatakan dalam
teorema berikut
Teorema 4.4.2 misalkan
𝛼𝑘 < 𝑟, 𝑝1 < 𝑅0 < 1 dan (𝐻1) ada, maka untuk sistem
Persamaan (4.2) mempunyai ▧ 𝐸2 stabil jika 𝑘 − 1 𝐴 − 𝜇 + 𝛼𝑘 ≤ 0 atau 𝑘 − 1 𝐴 − 𝜇 + 𝛼𝑘 > 0 𝑟 < 1 4 𝐴 + 𝛼𝑘 − 𝜇 𝑘 2 − 𝐻2 ▧ 𝐸2 tidak stabil jika
𝑘 − 1 𝐴 − 𝜇 + 𝛼𝑘 > 0 𝑟 > 1 4 𝐴 + 𝛼𝑘 − 𝜇 𝑘 2 − 𝐻2
Bifurkasi Hopf
Teorema 4.4.3
Misalkan 𝑎𝑘 < 𝑟, 𝑝1 < 𝑅0 < 1. Maka pada sistem (4.2) terjadi
bifurkasi Hopf jika 𝐻1 , 𝑘 − 1 𝐴 − 𝜇 + 𝛼𝑘 > 0, dan
𝐼2 = 𝑘−1 𝐴−𝜇+𝛼𝑘
2𝑘(𝑘−1) 1 − 1 +
4𝛼𝐴 1−𝑘 𝑘
𝑘−1 𝐴−𝜇+𝛼𝑘 2 berlaku Selanjutnya jika
𝜎 < 0 orbit periodik dari sistem (4.2) stabil sehingga terjadi bifurkasi
Hopf superkritikal. Dan jika 𝜎 > 0, orbit periodik dari sistem (4.2)
Bifurkasi Hopf
Bukti Bedasarkan sistem (4.2) 𝑑𝑆 𝑑𝑡 = 𝑆 𝐴 − 𝑆 − 𝑘𝐼𝑆 𝑑𝐼 𝑑𝑡 = 𝑘𝐼𝑆 − 𝜇𝐼 − 𝑟 𝛼+𝐼didapatkan salah satu titik kesetimbangan 𝐸2 = (𝑆2, 𝐼2) dan matriks
Jacobian 𝐸2 diketahui sebagai berikut 𝐽 𝐸2 = −𝑆2 −𝑘𝑆2 𝑘𝐼2 𝑟𝐼2 𝛼+𝐼2 2 Selanjutnya diperoleh 𝜆1,2 = 𝑡𝑟(𝐽(𝐸2) ± 𝑡𝑟(𝐽(𝐸2) 2−4𝑑𝑒𝑡(𝐽(𝐸2)) 2
Bifurkasi Hopf
Bifurkasi Hopf terjadi apabila matriks Jacobian mempunyai sepasang nilai eigen yang imajiner murni. Kedua nilai eigen imajiner murni jika dan hanya jika 𝑡𝑟(𝐽(𝐸2) = 0. Pada pembahasan sebelumnya diketahui
bahwa 𝑡𝑟(𝐽 𝐸2 ) = 0 jika hanya jika (𝐻1), 𝑘 − 1 𝐴 − 𝜇 + 𝛼𝑘 > 0, dan 𝐼2 =
𝑘−1 𝐴−𝜇+𝛼𝑘
2𝑘(𝑘−1) 1 − 1 +
4𝛼𝐴 1−𝑘 𝑘
𝑘−1 𝐴−𝜇+𝛼𝑘 2 berlaku. Maka terjadi
bifurkasi Hopf dengan syarat transversal
𝑑 𝑑𝑟 𝑅𝑒 𝜆 𝐽(𝐸2) 𝑟=1 4 𝛼𝑘+𝐴− 𝑢 𝑘 2 −𝐻2 = 𝐼2 2 𝛼+𝐼2 2 ≠ 0
Bifurkasi Hopf
Selanjutnya ditentukan bentuk normal bifurkasi Hopf dengan melakukan translasi titik kesetimbangan (𝑆2, 𝐼2) ke titik (0,0) dengan melakukan
transformasi 𝑥 = 𝑆 − 𝑆2, 𝑦 = 𝐼 − 𝐼2 dan 𝑑𝜏 = 𝑑𝑡 𝛼+𝑦+𝐼2 , sehingga diperoleh 𝑑𝑥 𝑑𝜏 = 𝛼 + 𝑦 + 𝐼2 [(𝐴 − 2𝑆2 − 𝑘𝐼2)𝑥 − 𝑘𝑆2𝑦 − 𝑘𝑥𝑦 − 𝑥 2] 𝑑𝑦 𝑑𝜏 = 𝑘𝑥𝑦 + 𝑘𝑆2 − 𝑢 𝑦 + 𝑘𝐼2𝑥 𝛼 + 𝑦 + 𝐼2 − 𝑟𝛼𝑦 𝛼+𝐼2
Kemudian untuk memudahkan, maka dimisalkan 𝑥 = 𝑆, 𝑦 = 𝐼 dan 𝜏 = 𝑡,
didapat 𝑑𝑆 𝑑𝑡 = 𝛼 + 𝐼 + 𝐼2 [(𝐴 − 2𝑆2 − 𝑘𝐼2)𝑆 − 𝑘𝑆2𝐼 − 𝑘𝑆𝐼 − 𝑆 2] 𝑑𝐼 𝑑𝑡 = 𝑘𝑆𝐼 + 𝑘𝑆2 − 𝑢 𝐼 + 𝑘𝐼2𝑆 𝛼 + 𝐼 + 𝐼2 − 𝑟𝛼𝐼 𝛼+𝐼2
Bifurkasi Hopf
Berdasarkan Persamaan (4.2) dan 𝑡𝑟 𝐽 𝐸2 = 0, diperoleh
𝐴 − 𝑆2 − 𝑘𝐼2 = 0, 𝑘𝑆2 − 𝑢 − 𝑟
𝛼+𝐼2 = 0, dan 𝑟𝐼2 − 𝑆2 𝛼 + 𝐼2
2 = 0
sehingga persamaan 𝑑𝑆𝑑𝑡 dan 𝑑𝐼𝑑𝑡 menjadi
𝑑𝑆 𝑑𝑡 = −𝑆2 𝛼 + 𝐼2 𝑆 − 𝑘𝑆2 𝛼 + 𝐼2 𝐼 − 𝑘𝛼 + 𝐴 𝑆𝐼 − 𝛼 + 𝐼2 𝑆 2 −𝑘𝑆2𝐼2 − 𝑘𝑆𝐼2 − 𝑆2𝐼 (4.58) 𝑑𝐼 𝑑𝑡 = 𝑘𝐼2 𝛼 + 𝐼2 𝑆 + 𝑆2 𝛼 + 𝐼2 𝐼 + 𝑘 𝛼 + 2𝐼2 𝑆𝐼 + 𝑟𝐼2 𝛼+𝐼2+ 𝑘𝑆𝐼 2 (4.59)
Bifurkasi Hopf
Kemudian membentuk persamaan (4.58) dan (4.59) dalam bentuk matriks
𝑑𝑆 𝑑𝑡 𝑑𝐼 𝑑𝑡 = −𝑚 −𝑘𝑚 𝑝 𝑚 𝑆 𝐼 + 𝑔 (4.60) dengan 𝑚 = 𝑆2 𝛼 + 𝐼2 𝑝 = 𝑘𝐼2 𝛼 + 𝐼2 𝑔 = − 𝑘𝛼 + 𝐴 𝑆𝐼 − 𝛼 + 𝐼2 𝑆2 − 𝑘𝑆2𝐼2 − 𝑘𝑆𝐼2 − 𝑆2𝐼 = 𝑘 𝛼 + 2𝐼2 𝑆𝐼 + 𝑟𝐼2 𝛼+𝐼2+ 𝑘𝑆𝐼 2
Bifurkasi Hopf
Selanjutnya dengan mencari matriks Jacobian dari persamaan (4.58) dan (4.59) dan subtitusi titik kesetimbangan (0,0) diperoleh matriks
Jacobian
𝐽 = −𝑚 −𝑘𝑚 𝑝 𝑚
dari matriks Jacobian di atas diperoleh nilai persamaan karakteristik
𝜆 2 − 𝑚2 + 𝑝𝑘𝑚 = 0 𝜆 2 + 𝑑𝑒𝑡 𝐽 𝐸2 = 0
𝜆 = ±𝑖 𝑑𝑒𝑡 𝐽 𝐸2 = ±𝑖𝜔
dengan permisalan
Bifurkasi Hopf
Berikutnya dengan subtitusi
𝑆 = 𝑥 𝑝− 𝑚𝑦 𝑝𝜔 dan 𝐼 = 𝑦 𝜔
ke matriks (4.60) maka matriksnya menjadi 𝑑𝑥 𝑑𝑡 𝑑𝑦 𝑑𝑡 = 0 −𝜔 𝜔 0 𝑥 𝑦 + 𝑓(𝑥, 𝑦) 𝑔(𝑥, 𝑦)
dan bentuk Normal Bifurkasi Hopf sebagai berikut 𝑑𝑥 𝑑𝑡 = −𝜔𝑦 + 𝑓(𝑥, 𝑦) 𝑑𝑦 𝑑𝑡 = 𝜔𝑥 + 𝑔(𝑥, 𝑦) dengan 𝑓 𝑥, 𝑦 = 2𝑚 𝛼+𝐼2 −𝑝 𝑘𝛼+𝐴 −𝑚𝑘 𝛼+2𝐼2 𝑝𝜔 𝑥𝑦 + 𝑝𝑚 𝑘𝛼+𝐴 −𝑘𝑆2𝑝2− 𝛼+𝐼2 𝑚2−𝑘𝐼2𝑚2 𝑝𝜔2 𝑦 2 − 𝛼+𝐼2 𝑝 𝑥 2− 1 𝑝𝜔𝑥 2𝑦 + 2𝑚−𝑝𝑘+𝑚𝑘 𝑝𝜔2 𝑥𝑦 2 + 𝜔2−𝑘𝑚2 𝑝𝜔3 𝑦 3 dan 𝑔 𝑥, 𝑦 = 𝑘 𝛼+2𝐼2 𝑝 𝑥𝑦 − 𝑘𝑚𝐼2 𝑝𝜔 𝑦 2+ 𝑘 𝑝𝜔𝑥𝑦 2 − 𝑘𝑚 𝑝𝜔2𝑦 3
Bifurkasi Hopf
Untuk menyelidiki jenis bifukasi Hopf yang terjadi menggunakan indeks stabilitas Γ = 1 16 𝑓𝑥𝑥𝑥 + 𝑓𝑥𝑦𝑦 + 𝑔𝑥𝑥𝑦 + 𝑔𝑦𝑦𝑦 + 16𝜔1 𝑓𝑥𝑦 𝑓𝑥𝑥 + 𝑓𝑦𝑦 − 𝑔𝑥𝑦 𝑔𝑥𝑥 + 𝑔𝑦𝑦 − 𝑓𝑥𝑥𝑔𝑥𝑥 + 𝑓𝑦𝑦𝑔𝑦𝑦 (0.0) dan diperoleh Γ = 2𝑘 𝑎+𝐼2 3𝑆2𝐼2 16𝑝2𝜔4 𝜎 dengan 𝜎 = [ 𝑎 + 𝐼2 (𝑆2 2𝑘2 + 𝑘 + 2 + 𝑘3𝐼2) − 𝑘2𝐼2 𝑘𝑎 + 𝐴 −2𝑘2𝑆2𝐼2] −𝑘𝐼2 + 𝑎 + 𝐼2 −2 − 𝑎𝑘 + 𝑆2 𝑘𝑆2 − 2𝑆22) + 𝑘𝑎 + 𝐴 𝑆2 −2𝑎 − 2𝐼2 + 𝑎𝑘 −2𝑘𝑆22 𝑎 + 2𝐼2 + 2𝑘𝑆 𝐼22 2
Berdasarkan Gambar dengan parameter 𝐴 = 2.6, 𝜇 = 0.2, 𝑘 = 2, 𝑎 = 0.05, 𝑟 = 0.11 terlihat adanya orbit periodik stabil dengan
nilai Γ = −0.9891 < 0, sehingga dapat disimpulkan terjadi bifurkasi
Hopf superkritikal.
Analisis Kestabilan Titik Kesetimbangan ketika 𝑅0 < 1.
𝐴 = 2, 𝜇 = 0.2, 𝑘 = 0.8, 𝑎 = 0.55, 𝑟 = 1.2
Analisis Kestabilan Titik Kesetimbangan ketika 𝑅0 > 1.
𝐴 = 2, 𝜇 = 0.2, 𝑘 = 2, 𝑎 = 0.9, 𝑟 = 0.25
KESIMPULAN
▧ Pada saat terjadi Bifurkasi Maju, Bilangan Reproduksi Dasar adalah 𝑅0 = 𝑘𝐴
𝜇+𝑟 𝛼
dengan titik kesetimbangan bebas penyakit 𝐸1 = 𝑆0, 𝐼0 = 𝐴, 0
dan titik kesetimbangan endemik yang stabil 𝐸2 = 𝑆2, 𝐼2 = 𝐴+𝛼𝑘+ 𝜇 𝑘− ∆ 2 , 𝐴−𝛼𝑘−𝜇 𝑘+ ∆ 2𝑘
Titik kesetimbangan bebas penyakit stabil asimtotik ketika 𝑅0 < 1, dan
KESIMPULAN
▧ Pada saat terjadi Bifurkasi Mundur, Bilangan Reproduksi Dasar adalah 𝑅𝑐 =
𝑘𝐴𝑐 𝜇+𝑟
𝛼
dengan titik kesetimbangan bebas penyakit 𝐸1 = 𝑆0, 𝐼0 = 𝐴, 0
dan titik kesetimbangan endemik sebagai berikut: Pada saat 𝑅0 = 𝑅𝑐 𝐸0 = 𝑆0, 𝐼0 = 𝐴+𝛼𝑘+ 𝜇 𝑘 2 , 𝐴−𝛼𝑘−𝜇 𝑘 2
yang merupakan titik pelana (saddle point) yang tidak stabil.
. Pada saat 𝑅𝑐 < 𝑅0 < 1 𝐸1 = 𝑆1, 𝐼1 = 𝐴+𝛼𝑘+𝜇 𝑘+ ∆ 2 , 𝐴−𝛼𝑘−𝜇 𝑘− ∆ 2𝑘
𝐸1 merupakan titik pelana (saddle point) yang tidak stabil,
𝐸2 = 𝑆2, 𝐼2 = 𝐴+𝛼𝑘+𝜇 𝑘− ∆ 2 , 𝐴−𝛼𝑘−𝜇 𝑘+ ∆ 2𝑘 𝐸2 stabil jika 𝑟 < 1 4 𝛼𝑘 + 𝐴 − 𝑢 𝑘 2 − 𝐻2 dan tidak stabil jika 𝑟 > 14 𝛼𝑘 + 𝐴 −𝑢 𝑘 2 − 𝐻2 .
KESIMPULAN
▧ Pada saat laju pengobatan 𝑟 = 1
4 𝛼𝑘 + 𝐴 −
𝑢 𝑘
2
− 𝐻2 terdapat sepasang nilai eigen yang imajiner murni yang menyebabkan adanya bifurkasi Hopf. Untuk σ < 0 terjadi bifurkasi Hopf superkritikal dan pada saat σ > 0 terjadi bifurkasi Hopf subkritikal.
▧ Dengan metode Numerik Runge-Kutta orde 4 menggunakan software MATLAB diperoleh hasil bahwa jika 𝑅0 < 1, maka terjadi keadaan
bebas penyakit karena kestabilan sistem menuju titik kesetimbangan bebas penyakit 𝐸1. Kemudian jika 𝑅0 > 1, maka penyakit menjadi
endemik karena kestabilan sistem menuju titik kesetimbangan endemik.
Daftar Pustaka
[1] Nugroho, Susilo. (2009). “pengaruh Vaksinasi Terhadap Penyebaran Penyakit dengan Model Epidemik SIR”. Tugas Akhir S1 Jurusan Matematika Unversitas Sebelas Maret.
[2] WHO(World Health Organization), Country Health Profile, http://www.who.int/countries/idn/en/. Diakses pada tanggal 4 September 2015, pukul 00.18 WIB.
[3] Iktisholiyah. (2010). “Analisis Stabilitas dan Optimal Kontrol pada Model Epidemik Tipe SIR dengan Vaksinasi”. Tugas Akhir S1 Jurusan Matematika ITS Surabaya.
[4] Zhang,X,dkk. (2008). “Backward Bifurcation of an Epidemik Model with Saturated Treatment Function”. Journal of Mathematical Analysis and Application, Vol 340, No. 1, pp 433-443.
[5] Lestari, Intan P. (2012). “Eksistensi Bifurkasi Mundur pada Model Penyebaran Penyakit Menular dengan Vaksinasi”. Tugas Akhir S1 Jurusan Matematika ITS Surabaya.
[6] Iswahyuni, N. (2013). “Analisa Kualitatif pada Model Epidemik SIS dengan Pengobatan”. Tugas Akhir S1 Jurusan Matematika ITS Surabaya.
[7] Musa, M. (2015). “Analisis Kestabilan dan Bifurkasi Mundur pada Model Infeksi Virus Hepatitis B dan C pada Tubuh Pasien”. Tugas Akhir S1 Jurusan Matematika ITS Surabaya.
[8] Jordan, D. W and Smith P. 2007. “Nonlinier Ordinary Differential Equations”. NewYork: Oxford University Press.
Daftar Pustaka
[9] Subiono. 2013. Sistem Linear dan Kontrol Optimal. Surabaya. Subiono Jurusan Matematika ITS Surabaya.
[10] Anton H, Rorres C. 2005. Elementary Linear Algebra 9th edition. John Wiley & Sons, Inc.
[11] Nara. (2014). “Analisa Kualitatif pada Model Penyakit Parasitosis”. Tugas Akhir S1 Jurusan Matematika ITS Surabaya.
[12] Castilo, C. dan Chavez. (2004). “Dynamical Models of Tubercolosis and Their Aplications”. [13] Zulminarni. (2007). “Analisa Kualitatif pada Model Penyakit Parasitosis”. Tugas Akhir S1 Jurusan Matematika ITS Surabaya.
[14] Novitasari, Y. (2009). “Menunjukan Eksistensi Orbit Periodik dari Sistem dinamik dengan menggunakan Bifurkasi Hopf”. Tugas Akhir S1 Jurusan Matematika ITS Surabaya.
[15] Hirsch, M. (2004). “Diffrential Equations Dynamical Systems and an Introduction to Chaos” [16] Wang, J,dkk. (2011). “Qualitative and Bifurcation Analysis Using an SIR Model with a Saturated Treatment Function”. Journal of Mathematicaland Computer Modelling, Vol 55, pp 710-722.