a
KENDALI KECEPATAN MOTOR DC
BERBASIS FUZZY-SETTING POINT PADA
LABVIEW
TUGAS AKHIR
Oleh :
SABAR TRIYANI
4211301058
PROGRAM STUDI TEKNIK MEKATRONIKA
JURUSAN TEKNIK ELEKTRO
POLITEKNIK NEGERI BATAM
2017
KENDALI KECEPATAN MOTOR DC BERBASIS
FUZZY-SETTING POINT PADA LABVIEW
TUGAS AKHIR
Oleh :
SABAR TRIYANI
NIM :4211301058
Disusun untuk memenuhi salah satu syarat kelulusan Program Diploma IV
Program Studi Teknik Mekatronika Politeknik Negeri Batam
PROGRAM STUDI TEKNIK MEKATRONIKA
JURUSAN TEKNIK ELEKTRO
POLITEKNIK NEGERI BATAM
2017
iii KENDALI KECEPATAN MOTOR DC BERBASIS FUZZY-SETTING POINT
PADA LABVIEW Nama mahasiswa : Sabar Triyani
NIM : 4211301058
Pembimbing I : Sumantri K.R, MT. Email : [email protected]
ABSTRAK
Kelebihan motor DC adalah mudahnya untuk dikendalikan kecepatan putarnya namun harus tetap maintenance untuk menjaga performanya. Dari kelebihan tersebut timbul suatu masalah dimana banyak yang menginginkan agar motor DC dapat berputar dengan kecepatan stabil. Oleh karena itu dibuatlah suatu alat yang mengatur kecepatan motor DC dengan menggunakan sistem logika fuzzy dengan setting-point pada LabVIEW. Logika fuzzy sendiri merupakan pengendali yang terbilang efektif karena memiliki respon sistem yang stabil dan tidak perlu mencari model matematisnya. Input fuzzy dirancang dengan 2 masukan yaitu error dan delta error. Input fuzzy akan diproses oleh NI USB 6008 dengan menggunakan program LabVIEW kemudian menghasilkan sinyal PWM sebagai pengontrol kecepatan motor.
Proses fuzzy logic menggunakan metode defuzzifikasi COA (Center Of Area) non-singleton. Pada pengendalian motor DC fuzzy pada labVIEW dapat digunakan sebagai pengontrol motor dengan kecepatan stabil. Meskipun dengan nilai setpoint yang diubah namun kecepatan tetap terjaga kestabilannya. Berdasarkan hasil percobaan yang telah dilakukan dengan memasukan set point pada kecepatan 0-3000 dengan rentan masing-masing 250 rpm, hasil keakurasian output menghasilkan error tertinggi yaitu ±118.928
pada setting point 1000 rpm dan error terendah yaitu ±2.9101 pada setting point 2500 rpm
iv DC MOTOR SPEED CONTROL FUZZY-SETTING POINT BASED ON
LABVIEW
Student Name : Sabar Triyani
NIM : 4211301058
Supervisor I : Sumantri K.R, MT. Email : [email protected]
ABSTRACT
Excess DC motor is easy to control the speed of rotation but must still maintenance to maintain its performance. From these advantages arises a problem where many want the DC motor can rotate with a stable speed. Therefore a device that controls the speed of a DC motor by using a fuzzy logic system with setting-point in LabVIEW. Fuzzy logic itself is a fairly effective controller because it has a stable system response and does not need to find a mathematical model. The fuzzy input is designed with 2 inputs ie error and delta error. The fuzzy input will be processed by NI USB 6008 using LabVIEW program then generate PWM signal as motor speed controller. Fuzzy logic process uses non-singleton COA (Center Of Area) defazzification method. In controlling fuzzy DC motor in labVIEW can be used as motor controller with stable speed. Although the setpoint value is changed but the speed is kept stable. Based on research that has been done by using fuzzy method at LabVIEW, accuracy value of DC motor output from several experiments close to setpoint value with the highest error is ± 118,928 and the lowest error is ± 2.91901.
v
vi DAFTAR ISI
PERNYATAAN KEASLIAN TUGAS AKHIR ... i
LEMBAR PENGESAHAN TUGAS AKHIR II ... ii
ABSTRAK ... iii
ABSTRACT ... iv
KATA PENGANTAR ... v
DAFTAR ISI ... vi
DAFTAR GAMBAR ... viii
DAFTAR TABEL ... ix
BAB I PENDAHULUAN ... 1
1.1 Latar Belakang Masalah ... 1
1.2 Perumusan Masalah ... 2
1.3 Batasan Masalah... 2
1.4 Tujuan dan Manfaat ... 2
1.5 Sistematika Penulisan ... 3
BAB II DASAR TEORI ... 4
2.1 Motor DC ... 4
2.1.1 Karakteristik Motor DC ... 5
2.2 Fuzzy Logic ... 5
2.2.1 Pengendali Fuzzy Logic ... 6
2.2.2 Fungsi Keanggotaan ... 6 2.2.3 Fuzzification ... 7 2.2.4 Basis Aturan... 8 2.2.5 Penegasan (Defuzzification) ... 10 2.3 LabVIEW ... 11 2.3.1 Tampilan LabVIEW ... 11
vii
2.4 Fuzzy Pada LabVIEW... 13
2.5 NI USB 6008-6009 [9] ... 14
2.6 Rotary Encoder... 14
2.7 EMS 30 A H-Bridge ... 14
BAB III PERANCANGAN SISTEM ... 16
3.1 Rancangan Penelitian ... 16
3.2 Rancangan Perangkat Keras (Hardware)... 16
3.3 Rancangan Perangkat Lunak (Software) ... 17
3.4 Rancangan Mekanik ... 18
3.5 Instrumen Penelitian... 19
3.5.1 Alat Pengujian yang digunakan ... 19
3.5.2 Tempat Pengujian ... 19
3.5.3 Teknik Pengujian ... 19
BAB IV HASIL DAN ANALISA ... 20
4.1 Hasil Penelitian ... 20
4.2 Analisa... 23
4.2.1 Menghitung nilai µ fungsi keanggotaan input error & d_error ... 23
4.2.2 Perbandingan dengan Rule Evaluation ... 24
4.2.3 Menghitung Luas Trapesium berdasarkan Rule Evaluation ... 24
4.2.4 Menghitung defuzifikasi dengan metode centroid serta menghitung error dengan membandingkan dengan tools fuzzy labview ... 25
BAB V KESIMPULAN DAN SARAN ... 27
5.1 Kesimpulan ... 27
5.2 Saran ... 27
DAFTAR PUSTAKA ... 28 LAMPIRAN
viii DAFTAR GAMBAR
Gambar 2.1 Konstruksi Motor DC ... 4
Gambar 2.2 Batasan Kerja Motor DC ... 5
Gambar 2.3 Struktur Pengendali Fuzzy ... 6
Gambar 2.4 Representasi Linear Naik ... 7
Gambar 2.5 Representasi Linear Turun ... 7
Gambar 2.6 Membership Input ... 8
Gambar 2.7 Rule Evaluation ... 9
Gambar 2.8 Membership Output ... 10
Gambar 2.9 Jendela Front Panel ... 11
Gambar 2.10 Jendela Blok Diagram... 12
Gambar 2.11 Control Palette... 12
Gambar 2.12 Function Palette... 12
Gambar 2.13 Simulasi Fuzzy Logic Tools LabVIEW ... 13
Gambar 2.14 NI USB 6008 DAQ ... 14
Gambar 3.1 Blok Diagram Perancangan Hardware ... 16
Gambar 3.2 Flowchart Cara Kerja Sistem ... 17
Gambar 3.3 Desain Mekanik ... 18
Gambar 3.4 Fuzzy Logic Toolbox ... 19
Gambar 4.1 Respon motor dengan fuzzy-setting point dengan kecepatan 200 rpm ... 21
Gambar 4.2 Respon motor dengan fuzzy-setting point dengan kecepatan 2000 rpm ... 21
Gambar 4.3 Respon motor dengan fuzzy-setting point dengan kecepatan 2500 rpm ... 22
Gambar 4.4 Fungsi Keanggotaan input error ... 23
Gambar 4.5 Fungsi Keanggotaan input d_error ... 23
Gambar 4.6 Fungsi Keanggotaan fuzzy non-singleton ... 24
ix DAFTAR TABEL
Tabel 2.1 Alokasi Pin Interface Header J1 ... 15 Tabel 4.1 Parameter Output Motor terhadap fuzzy-setting point ... 22 Tabel 4.2 Minimun Nilai µ Array... 25
1 BAB I
PENDAHULUAN
1.1 Latar Belakang Masalah
Motor DC merupakan aktuator yang sangat lazim untuk digunakan. Motor Dc sangat populer digunakan pada dunia industri, mulai dari motor conveyor, motor pembuka penutup pintu/gate dan lainnya dalam bidang produksi maupun industri. Motor DC mempunyai kelebihan salah satunya yaitu dapat mencapai nilai maksimum dan motor DC juga tidak memiliki suara yang keras (bising) ketika motor berputar. Selain itu, kelebihan motor DC lainnya merupakan mudahnya untuk dikendalikan kecepatan putarnya namun harus tetap maintenance untuk menjaga performanya.
Dengan banyaknya kegunaan dari motor DC maka akan timbul sebuah pemikiran bagaimana untuk mengatur kecepatan motor DC sesuai dengan kebutuhan dan keinginan sehingga berjalan dengan baik. Banyak sistem kendali yang telah diaplikasikan untuk mengatur kecepatan motor DC. Beberapa penelitian telah dilakukan untuk memecahkan masalah dalam pengaturan kecepatan motor DC diantaranya: pengendalian kecepatan motor DC dengan PD-logika fuzzy terhadap pengereman berbasis mikrokontroller [1]. Dan Sistem Kendali hybrid PID-logika fuzzy pada pengaturan kecepatan motor DC [2].
Dari penelitian yang telah dilakukan umumnya menggunakan logika fuzzy sebagai pengontrol kecepatan motor DC. Logika fuzzy merupakan logika yang nilai outputnya bernilai samar atau antara nol (0) dan satu (1). Banyak hal yang mempengaruhi kecepatan motor DC, diantaranya pada saat diberi beban maka kecepatan motor akan melambat. Agar mendapatkan nilai kecepatan yang stabil pada saat diberi beban yang bervariasi maka dibutuhkan kajian lebih lanjut sehingga kecepatan motor yang didapat stabil.
Dari permasalahan yang ada maka timbul suatu pemikiran bagaimana cara mengendalikan kecepatan motor DC agar bernilai stabil dengan adanya gangguan yang ada. Dari permasalah ini penulis membuat suatu alat yang digunakan sebagai pengontrol kecepatan motor DC dengan berbasis fuzzy-settingpoint pada LabVIEW sehingga kecepatan motor stabil sesuai yang diinginkan. Disini peneliti menggunakan LabVIEW karena selama ini LabVIEW sangat jarang digunakan sebagai pengontrol namun hanya digunakan sebagai monitoring. Dalam penelitian ini penulis menggunakan metode fuzzy sebagai pengontrolnya. Biasanya fuzzy hanya dibuat dengan program C#, Delphi dan yang lainnya. Namun jarang orang tahu bahwa fuzzy juga dapat dibuat dalam bentuk LabVIEW.
2 Oleh karena itu peneliti bertujuan untuk mengenalkan bagaimana caranya menggunakan metode fuzzy dalam bentuk LabVIEW. Karena dengan LabVIEW kita hanya menggunakan tools fuzzy yang sudah tersedia didalam software. Sehingga kita hanya tinggal menyusunnya sesuai dengan aturan fuzzy. Penulis juga menggunakan LabVIEW sebagai monitoringnya untuk mengetahui tingkat kestabilan motor.
1.2 Perumusan Masalah
Berdasarkan uraian latar belakang diatas maka dapat dibuat suatu perumusan masalah sebagai berikut:
1. Bagaimana cara untuk melakukan komunikasi antara fuzzy dengan LabVIEW? 2. Bagaimana merancang dan membuat pengendalian kecepatan Motor DC
menggunakan kontrol logika fuzzy pada LabVIEW?
3. Bagaimana cara merancang sistem pengontrolan motor DC dengan setpoint yang berbeda?
1.3 Batasan Masalah
Pada penelitian ini permasalahan yang dibahas akan dibatasi dalam hal sebagai berikut:
1. Motor yang dikendalikan adalah motor dengan tegangan 12Vdc. 2. Kendali motor menggunakan metode fuzzy pada LabVIEW. 1.4 Tujuan dan Manfaat
Tujuan dari penelitian ini adalah :
1. Mengendalikan kecepatan motor DC agar tetap terjaga kestabilannya. 2. Set point diatur dengan menggunakan LabVIEW.
Adapun manfaat dari penelitian ini adalah mengatur kecepatan motor DC agar terjaga sesuai dengan nilai setpoint, baik pada saat diberi beban ataupun tidak.
3 1.5 Sistematika Penulisan
Sistematika penulisan penelitian ini adalah sebagai berikut :
BAB I PENDAHULUAN
Bab ini menjelaskan pendahuluan yang berisikan latar belakang, perumusan masalah, batasan masalah, tujuan, dan sistematika penulisan.
BAB II DASAR TEORI
Bab ini menjelaskan tentang teori dasar cara kerja motor DC, metode fuzzy, LabVIEW, serta fuzzy pada LabVIEW.
BAB III PERANCANGAN SISTEM
Bab ini menjelaskan tentang perancangan secara detail bagian-bagian sistem yang mulai dari proses desain, simulasi sampai dengan implementasi lengkap dengan penjelasannya, parameter-parameter sistem, flow chart proses pekerjaan sistem dan hal-hal lain yang berhubungan dengan perancangan.
BAB IV HASIL DAN ANALISA
Bab ini menjelaskan tentang hasil dari pengukuran dan pengujian yang dilakukan dalam penelitian. Kemudian dilakukan analisis secara detail dan terperinci berdasarkan hasil penelitian dan pengujian.
BAB V KESIMPULAN DAN SARAN
Bab ini menjelaskan mengenai hasil kesimpulan dari pengukuran dan pengujian yang telah dilakukan yang tentu saja harus sesuai dengan tujuan penelitian. Dan saran dituliskan untuk menjelaskan mengenai hal-hal yang belum dilakukan atau kelanjutan penelitian yang akan dilakukan untuk perbaikan.
4 BAB II
DASAR TEORI
2.1 Motor DC
Motor DC merupakan alat yang mengubah energi listrik DC menjadi energi mekanik putaran. Sebuah motor DC dapat difungsikan sebagai generator atau sebaliknya generator dapat difungsikan sebagai motor DC. Pada motor DC kumparan medan disebut stator (bagian yang tidak berputar) dan kumparan jangkar disebut rotor (bagian yang berputar). Jika tejadi putaran pada kumparan jangkar dalam pada medan magnet, maka akan timbul tegangan yang berubah-ubah arah pada setiap setengah putaran, sehingga merupakan tegangan bolak-balik [3]. Bagian-bagian yang penting dari motor DC dapat ditunjukkan pada Gambar 2.1.
Gambar 2.1 Konstruksi Motor DC [3]
Motor DC memiliki kemampuan untuk dapat dikontrol arah beserta besar kecepatannya. Arah putaran motor diatur dengan cara membalikan polaritas tegangan sedangkan kecepatan motor diatur melalui pengaturan tegangannya. Oleh karena itu, pada penelitian ini pengaturan tegangan di petakan (mapping) dengan nilai PWM (Pulse Width Modulation) untuk mengendalikan kecepatan putar motor. PWM sendiri merupakan sinyal yang dapat memvariasikan lebar pulsanya, rentang nilai PWM berkisar dari 0-255, lebar pulsa pada PWM disebut dengan duty cycle. Prinsip kerja PWM yaitu dengan mengatur gelombang persegi sehingga dapat menjadi supply bagi motor DC dengan pulsa yang dihasilkan berupa HIGH dan LOW. Untuk menunjang penelitian ini juga dibutuhkan hardware berupa NI USB 6008 dimana tegangan maksimal yang dihasilkan adalah 5 V. Sedangkan motor DC yang digunakan memiliki tegangan lebih dari 5V sehingga dibutuhkan suatu driver motor yang memiliki konsep H-bridge.
5 2.1.1 Karakteristik Motor DC
Karakteristik yang dimiliki suatu motor DC dapat digambarkan melalui kurva daya dan kurva torsi/kecepatannya, dari kurva tersebut dapat dianalisa batasan- batasan kerja dari motor serta daerah kerja optimum dari motor tersebut.
Gambar 2.2 Batasan Kerja dari Motor DC [4]
Dari grafik diatas terlihat hubungan antara torsi dan kecepatan untuk suatu motor dc tertentu. dari grafik terlihat bahwa torsi berbanding terbalik dengan kecepatan putaran, dengan kata lain terdapat trade off antara besar torsi yang dihasilkan motor dengan kecepatan putaran motor. Dua karakteristik penting terlihat dari grafik yaitu:
a. Stall torque menunjukan titik pada grafik dimana torsi maksimum, tetapi tidak ada putaran pada motor.
b. No load speed menunjukan titik pada grafik dimana terjadi kecepatan putaran maksimum, tetapi tidak ada beban pada motor [4].
2.2 Fuzzy Logic
Fuzzy logic pertama kali diperkenalkan oleh Jan Lukasiewicz pada tahun 1920an sebagai teori kemungkinan. Logika kemungkinan ini memperluas jangkauan dari nilai kebenaran untuk semua bilangan real pada interval antara 0 dan 1. Selanjutnya diteliti lebih lanjut oleh Max Black pada tahun 1930an dalam penelitiannya tentang ketidakjelasan (vagueness): sebuah latihan pada analisis logis. Pada tahun 1965, Professor dan kepala departemen teknik elektrik di Universitas California di Berkeley, Lutfi Zadeh, menemukan kembali, mengidentifikasi dan mengeksplorasi, dan mempromosikan dan berjuang untuk fuzzy logic [5].
6 2.2.1 Pengendali Fuzzy Logic
Tujuan utama dalam system pengendali adalah mendapatkan keluaran (output) sebagai respon dari masukan (input). Dalam kendali dengan cara klasik, biasanya menggunakan suatu rumus matematika yang cukup rumit. Hal ini berbeda dengan kendali fuzzy, dimana pengendali fuzzy ini berbasis pengetahuan manusia dalam melakukan suatu proses kendali. Konsep matematika dari logika fuzzy sangat sederhana dan mudah dimengerti. Logika fuzzy melibatkan aturan-aturan yyang dinyatakan dengan kata-kata yang tidak memerlukan presisi tinggi serta terdapat toleransi untuk data yang kurang tepat [5]. Struktur dasar pengendali fuzzy diperlihatkan pada Gambar 2.3.
Gambar 2.3 Struktur pengendali fuzzy 2.2.2 Fungsi Keanggotaan
Fungsi keanggotaan merupakan sebuah kurva yang mempresentasikan masukan data ke derajat keanggotaan yang memiliki rentang nilai antara 0 dan 1. Dengan fungsi keanggotaan yang telah dirancang maka nilai-nilai masukan tersebut akan menjadi informasi yang berguna sebagai proses pengolahan selanjutnya. Banyaknya jumlah suatu fungsi membership dalam input fuzzy menentukan banyaknya basis aturan yang akan dibuat.
7 Gambar 2.4 Representasi linear naik [6]
Gambar 2.5 Representasi linear turun [6]
Fungsi Keanggotaan naik: µ[𝑥] = {
0;
(𝑥 − 𝑎)/(𝑏 − 𝑎); 1;
(2.1)
Fungsi Keanggotaan turun: µ[𝑥] = {
1;
(𝑏 − 𝑥)/(𝑏 − 𝑎); 0;
(2.2)
Fungsi keanggotaan linier merupakan suatu bentuk garis lurus dari suatu derajat keanggotaan 0 sampai 1 atau sebaliknya 1 sampai 0. Oleh sebab itu representasi linier dibagi menjadi dua yaitu linier naik dan linier turun. Linier naik derajat keanggotaanya bernilai dari 0 sampai 1, dan sebaliknya linier turun derajat keangotaanya bernilai dari 1 sampai 0. Pada penelitian ini alasan pemilihan representasi linier adalah karena bentuknya yang sederhana dan disesuaikan dengan membership yang telah dirancang. Selain itu, untuk menentukan fungsi keanggotaannya representasi linier memiliki sistem matematis yang lebih mudah untuk dipahami dibandingkan dengan representasi lain.
2.2.3 Fuzzification
Fuzzifikasi merupakan sutau tahapan untuk merubah nilai input yang berupa variabel crisp menjadi bentuk fuzzy dengan menentukan nilai derajat keanggotaan terlebih dahulu. Sehingga kemudian input dapat dikelompokkan pada himpunan fuzzy yang tepat agar masukan controller fuzzy bisa dipetakan agar sesuai dengan himpunan fuzzy.
8 Gambar 2.6 Membership Input
Keterangan : Z : Zero PS : Positive Small PM : Positive Medium PB : Positive Big NS : Negative Small NM : Negative Medium NB : Negative Big
Penentuan membership function input ditentukan dengan proses trial and error pada saat melakukan penelitian. Dimana ketika menggunakan membership function seperti diatas hasil output mencapai nilai set-point dengan baik tanpa adanya banyak error.
2.2.4 Basis Aturan
Basis aturan merupakan aturan fuzzy yang digunakan untuk pengendalian sistem. Aturan itu sendiri dibuat berdasarkan logika manusia yang berkaitan dengan jalan pikiran serta penelitian yang dilakukan pembuatnya. Aturan ini dibuat untuk membandingkan antara masukan dari fuzzifikasi dengan aturan yang sudah dibuat sesuai intuisi. Sehingga output yang diiginkan akan sesuai dengan yang dibuat.
9 Gambar 2.7 Rule Evaluation
Dalam menentukan perbandingan antara nilai masukan fuzzy pada basis aturan digunakan suatu operasi perbandingan. Pada basis aturan untuk penelitian ini menggunakan fungsi AND sebagai operasi perbandingannya. Konsep Penerapan yang dilakukan dengan fungsi AND ini adalah membandingkan nilai keanggotaan dari masukan fuzzy. Dimana nilai input yang memiliki nilai keanggotaan terkecil yang akan menjadi pemenangnya. Untuk menentukan rule evaluation dapat dilakukan seperti contoh dibawah ini :
a. Menentukan µ nilai error dan d_error - µ membership error = 30 µ NB = 0 µ NM = 0 µ NS = 0 µ Z = (𝑏−𝑥) (𝑏−𝑎) = 200−30 200−0 = 170 200= 0.85 µ PS = (𝑥−𝑎) (𝑏−𝑎)= 30−0 200−0= 30 200= 0.15 µ PM = 0 µ PB = 0 - µ membership d_error = 5 - µ NB = 0 - µ NM = 0 - µ NS = 0 - µ Z = (𝑏−𝑥) (𝑏−𝑎) = 25−5 25−0= 20 25= 0.8 - µ PS = (𝑥−𝑎) (𝑏−𝑎) = 5−0 25−0= 5 25= 0.2 - µ PM = 0 - µ PB = 0
10 b. Menentukan rule evaluation dengan membandingkan nilaii terkecil dari error dan
d_error. ERROR D EL TA ER ROR PB PM PS Z NS NM NB PB 0 0 0 0 0 0 0 PM 0 0 0 0 0 0 0 PS 0 0 0.15 0.2 0 0 0 Z 0 0 0.15 0.8 0 0 0 NS 0 0 0 0 0 0 0 NM 0 0 0 0 0 0 0 NB 0 0 0 0 0 0 0
Cara penentuan nilai disesuaikan dengan rule base yang telah dirancang : - If error PS = 0.15 AND d_error PS = 0.2 THEN 0.15 < 0.2 = 0.15 (PS) - If error PS = 0.15 AND d_error Z = 0.8 THEN 0.15 < 0.8 = 0.15 (PS) - If error Z = 0.85 AND d_error PS = 0.2 THEN 0.2 < 0.85 = 0.2 (PS) - If error Z = 0.85 AND d_error Z = 0.8 THEN 0.8 < 0.85 = 0.8 (Z), dst.
Dari penentuan diatas terdapat tiga nilai PS namun, tetap diambil nilai terkecilnya. Oleh karena itu, melalui rule base dapat kita ketahui bahwa nilai yang memenangkan nilai terkecil adalah PS = 0.15 dan Z = 0.8.
2.2.5 Penegasan (Defuzzification)
Defuzzifikasi merupakan proses lanjutan setelah pengambilan keputusan berdasarkan basis aturan (rule evaluation) yang sudah ditetapkan. Pada penelitian ini digunakan output non-singleton dengan metode COA sebagai keluarannya.
Gambar 2.8 Membership Output
Proses defuzzifikasi sendiri merupakan proses besaran fuzzy yang berbentuk himpunan dan diubah menhasu bentuk crisp. Besar nilai output crisp akan didapat dengan
11 cara menentukan titik tengah hasil pemetaan dari output non-singleton Untuk menentukan defuzzifikasi dapat menggunakan persamaan dibawah ini :
𝑧 =∫ 𝜇𝑐(𝑧) 𝑥 𝑧 𝑑𝑧
𝜇𝑐(𝑧) 𝑑𝑧 (2.5)
2.3 LabVIEW
LabVIEW ( Laboratory Virtual Instrumentation Engineering Workbench ), adalah perangkat lunak komputer untuk pemrosesan dan visualisasi data dalam bidang akuisisi data, kendali instrumentasi serta automasi industri yang pertama kali dikembangkan oleh perusahaan National Instruments pada tahun 1986 [6].
2.3.1 Tampilan LabVIEW
Tampilan sederhana LabVIEW terdiri dari dua jendela yaitu :
a. Front Panel
Front panel adalah bagian window yang berlatar belakang abu-abu serta mengandung control dan indikator. Front panel digunakan untuk membangun sebuah VI (virtual instrument), menjalankan program dan mendebug program. Tampilan dari front panel dapat di lihat pada Gambar 2.9.
Gambar 2.9 Jendela Front Panel
b. Blok diagram
Blok diagram adalah bagian window yang berlatar belakang putih berisi source code yang dibuat dan berfungsi sebagai instruksi untuk front panel. Tampilan dari blok diagram dapat lihat pada Gambar 2.10.
12 Gambar 2.10 Jendela Blok Diagram
c. Control dan Function Pallete
Control Pallete merupakan tempat beberapa control dan indikator pada front panel, control pallete hanya tersedia di front panel, untuk menampilkan control pallete dapat dilakukan dengan mengkilk windows >> show control pallete atau klik kanan pada front panel [7]. Contoh control pallete ditunjukkan pada Gambar 2.11.
Gambar 2.11 Control Pallete
Functions Pallete digunakan untuk membangun sebuah blok diagram, untuk menampilkannya dapat dilakukan dengan mengklik windows >> show control
pallete atau klik kanan pada lembar kerja blok diagram. Contoh dari functions
pallete ditunjukkan pada Gambar 2.12.
13 2.4 Fuzzy Pada LabVIEW
Pada prinsipnya cara kerja fuzzy pada LabVIEW sama dengan fuzzy pada C#, Delphi atau software lainnya. Hanya saja fuzzy pada LabVIEW tidak menggunakan program dalam bentuk teks melainkan fuzzy di LabVIEW dibuat dalam bentuk rangkaian. Pada LabVIEW telah disediakan library khusus untuk fuzzy. Oleh karena itu, banyak kemudahan yang kita dapatkan dengan menggunakan fuzzy pada LabVIEW. Misalnya saja tingkat efisiensi waktu dalam pembuatan membership, rule evaluation serta terdapat simulasi untuk logika fuzzy yang telah dirancang.
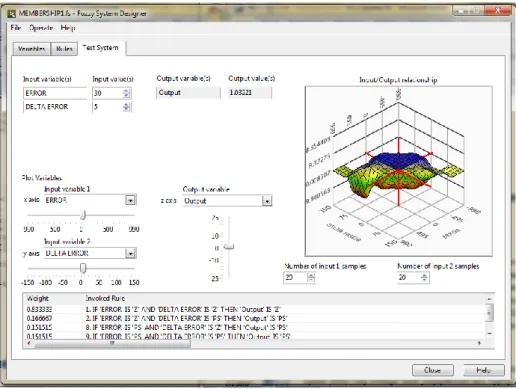
Gambar 2.13 Simulasi Fuzzy Logic Tools LabVIEW
Simulasi seperti Gambar 2.13 sangat membantu dalam menilai hasil penelitian. Dimana dengan simulasi diatas dapat dilakukan perbandingan antara hasil keluaran dari sistem kendali dengan hasil keluaran pada tools LabVIEW, dimana parameter membership masukan dan keluaran serta rule evaluation akan disamakan dengan sistem yang telah dirancang. Dengan harapan jika menggunakan metode sama maka didapat hasil yang sama dengan hasil simulasi tools pada LabVIEW. Oleh karena itu, masukan dari tools LabVIEW disamakan dengan masukan sistem kendali yang telah dirancang.
14 2.5 NI USB 6008-6009
National Instrument USB 6008 adalah perangkat keras yang menyediakan dasar data aquisisi (DAQ) yang berfungsi untuk pengaplikasian data logging, pengukuran yang praktis dan untuk media pembelajaran [8].
Gambar 2.14 NI USB 6008 DAQ [8] 2.6 Rotary Encoder
Rotary encoder adalah komponen yang berfungsi untuk memnatau suatu gerakan putaran maupun posisi. Dari putaran itu data yang terpantau akan diubah dalam bentuk digital yang kemudian akan diubah menjadi lebar pulsa yang kemudian dihubungkan ke controller dalam penelitian ini menggunakan NI USB 6008. Dari data yang didapat kemudian akan diolah menjadi data berupa kecepatan.
Konstruksi dari rotary encoder berupa piringan tipis yang dikopel dengan bagian motor DC yang berputar. Pada piringan terdapat lubang kecil dipinggiran lingkaran yang berguna sebagai penghantar cahaya LED phototransistor. Piringan tersebut berputar sesuai dengan kecepatan putaran motor. Oleh karena itu, semakin banyak lubang yang ada pada piringan maka semakin banyak pula pulsa yang dihasilkan oleh rotary encoder pada satu kali putaran.
2.7 EMS 30 A H-Bridge
EMS 30 A H-Bridge merupakan H-Bridge berbasis VNH3SP30 yang didesain untuk menghasilkan 2 arah dengan arus kontinyu sampai dengan 30 A pada tegangan 5,5 Volt sampai 36 Volt (IC VNH2SP30 hanya sampai 16 V). Modul ini dilengkapi dengan rangkaian sensor arus beban yang dapat digunakan sebagai umpan balik ke pengendali. Modul ini mampu men-drive beban-beban induktif seperti misalnya relay, solenoida, motor DC, motor stepper, dan berbagai macam beban lainnya.
15 Tabel 2.1 Alokasi Pin Interface Header J1
Pin Nama I/O Fungsi
1 MIN 1 I Pin Input untuk menentukan output 2 MIN 2 Pin input untuk menentukan output
MOUT2
3 MEN 1 I/O
Pin enable untuk output MOUT1
Diberi logika High untuk mengaktifkan half H-Bridge 1, diberi logika Low secara eksternal untuk menonaktifkan half H-Bridge 1
Jika terjadi kondisi Fault (thermal shutdown, undervoltage, overvoltage, dsb.), maka pin ini akan ditarik Low secara internal oleh modul H-Bridge untuk melaporkan adanya kondisi Fault
4 MEN 2 I/O
Pin untuk enable output MOUT2
Diberi logika High untuk mengaktifkan half H-Bridge 2 diberi logika Low secara eksternal untuk menonaktifkan half H-Bridge 2.
Jika terjadi kondisi Fault (thermal shutdown, undervoltage, overvoltage , dsb.), maka pin ini akan ditarik Low secara internal oleh modul H-Bridge untuk melaporkan adanya kondisi Fault.
5 MCS O Output tegangan analog yang berbanding lurus dengan arus beban (Range output 0 - 5 V) Tersedia untuk IC VNH2SP30 6 MPWM I Pin input untuk mengatur kerja modul H-Bridge secara
PWM
7,9 VCC - Terhubung ke catu daya untuk input (5 Volt) 8,10 PGND - Titik referensi untuk catu daya input
16 BAB III
PERANCANGAN SISTEM
3.1 Rancangan Penelitian
Penelitian yang akan dilakukan yaitu rancang bangun sistem kendali kecepatan motor DC dengan menggunakan metode fuzzy LabVIEW memiliki tahapan penelitian sebagai berikut:
1. Pembuatan program pada LabVIEW 2. Pembuatan mekanik.
3. Pembuatan dan perakitan rangkaian sensor encoder.
4. Pengujian perangkat lunak sensor encoder dan NI USB 6008.
5. Pengujian Motor DC dengan menggunakan program yang sudah dibuat dan sensor encoder.
6. Analisa data kecepatan motor DC dengan nilai set point pada fuzzy LabVIEW. 7. Penulisan tugas akhir.
3.2 Rancangan Perangkat Keras (Hardware)
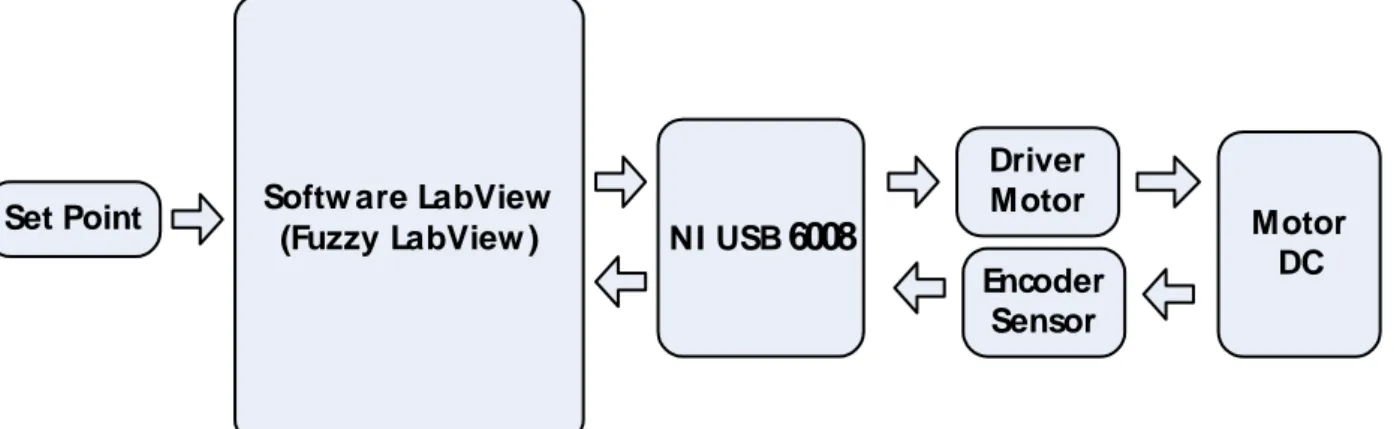
Gambar 3.1 Blok Diagram Perancangan Hardware
Berdasarkan dari gambar blok diagram diatas digunakan beberapa perangkat keras yang berguna untuk mendukung proses kerja alat agar berjalan sesuai yang diinginkan. Salah satunya adalah dengan menggunakan fuzzy pada LabVIEW yang digunakan sebagai pengontrol dari sistem alat yang akan dibuat. Fuzzy pada
Set Point Softw are LabView
(Fuzzy LabView ) NI USB 6008
Driver Motor Encoder Sensor Motor DC
17 LabVIEW digunakan untuk memproses hasil data yang masuk dari input setpoint yang kemudian hasilnya akan digunakan sebagai input pada NI USB 6008. NI USB disini berguna sebagai pengolah data yang masuk dari PC yang kemudian data akan diubah dalam bentuk tegangan sehingga dapat menggerakan actuator yaitu motor DC. Apabila motor DC sudah bergerak maka kecepatannya akan terbaca oleh sensor encoder dan hasil data kecepatan encoder tersebut akan menjadi inputan kembali bagi NI USB 6008 yang kemudian akan menjadi pembanding apakah kecepatan yang dibaca oleh sensor encoder sama dengan set point yang diberikan didalam LabVIEW. Jika data kecepatan yang dibaca sensor encoder kurang dari set point atau lebih dari set point yang diberikan, maka LabVIEW akan melooping data kembali dan dikeluarkan output dalam bentuk tegangan sehingga data kecepatan yang dihasilkan sama dengan set point yang diberikan. Sehingga dengan software LabVIEW kita dapat melihat keluaran kecepatan dari motor.
3.3 Rancangan Perangkat Lunak (Software)
Perangkat lunak dalam sistem ini berperan penting dalam mengontrol serta memonitoring sistem. Perangkat lunak ini berguna untuk mengatur proses kerja suatu sistem. Untuk lebih jelas bisa dilihatdari Gambar 3. 2 yang menjelaskan cara kerja sistem.
18 Langkah pertama yang dilakukan pada sistem ini adalah memasukan nilai settingpoint atau nilai awal. Selanjutnya saat motor bergerak akan menimbulkan suatu error antara nilai set point dengan nilai yang dikeluarkan oleh motor. Sensor encoder yang ada pada motor berfungsi untuk membandingkan antara nilai set point dengan nilai yang dihasilkan motor. Sehingga nilai yang diterima sensor encoder kemudian akan dikirim ke fuzzy yang ada pada LabVIEW. Setelah mendapat nilai fuzzy-nya maka nilai tersebut kemudian akan masuk pada NI USB 6008 yang kemudian akan dikonversikan menjadi nilai tegangan yang kemudian akan dialirkan kemotor sehingga motor akan berputar stabil sesuai dengan nilai set point.
Data yang sudah diproses melalui LabVIEW dan NI USB 6008 akan dilihat kestabilannya dalam bentuk sinyal. Sinyal yang keluar dalam grafik akan langsung terdeteksi kestabilannya jika motor dalam kondisi diam maupun bergerak. Jika keluaran sinyal memiliki sedikit ripple maka alat tersebut sudah cukup stabil, tetapi jika memiliki ripple yang banyak maka kestabilan alat masih belum stabil.
3.4 Rancangan Mekanik
Gambar 3.3 Desain Mekanik
Dari gambar diatas dapat diketahui bahwa perancangan mekanik memiliki tiga komponen utama yaitu NI USB 6008, motor DC, encoder sensor. Komponen input berisikan plug tegangan dari power supply. NI USB 6008 merupakan sarana komunikasi dari LabVIEW ke motor DC dan sebaliknya. Motor DC yang digunakan adalah motor DC 12 Vdc.
19 3.5 Instrumen Penelitian
3.5.1 Alat Pengujian yang digunakan
Salah satu pengujian alat ukur yang digunakan pada percobaan ini adalah menggunakan fuzzy logic toolbox yang tersedia pada LabVIEW, tools ini menyediakan fungsi untuk menganalisa, mendesain serta mensimulasikan logika fuzzy yang akan dirancang.
Gambar 3.4 fuzzy logic toolbox 3.5.2 Tempat Pengujian
Tempat dilakukannya pengujian dalam penelitian ini adalah didalam ruangan (indoor). Tempat pengujian yang dilakukan hanya dilakukan di dalam ruangan tidak dilakukan luar ruangan (outdoor).
3.5.3 Teknik Pengujian
Teknik pengujian yang dilakukan dalam penelitian ini adalah dengan menggunakan pengujian secara langsung. Dimana pengujian ini dilakukan dengan cara menghubungkan antara software dengan hardware. Langkah pertama dalam pengujian ini adalah membuka software LabVIEW dimana terdapat program pengontrolnya, kemudian masukan nilai set point sesuai keinginan untuk menghidupkan motor dc. Setelah memasukkan nilai set point selanjutnya klik button start untuk menjalankan motor dc. Sehingga ketika motor berputar, maka kecepatan motor akan berusaha untuk mencapai nilai set point dan akan berputar dengan kecepatan yang stabil. Untuk hasil kestabilan kecepatan motor dapat dilihat pada grafik yang terdapat pada waveform.
20 BAB IV
HASIL DAN ANALISA
Berikut ini data yang didapat dari hasil percobaan yang diamati melalui grafik yang dihasilkan oleh LabVIEW. Pada pengambilan data ini dapat dilihat tingkat kestabilan dari putaran motor yang dihasilkan sesuai dengan nilai setting point yang dimasukan.
4.1 Hasil Penelitian
Untuk mengetahui respon motor DC, maka dilakukan percobaan pada kecepatan 250 rpm, 2000 rpm dan 2500 rpm. Dari percobaan yang telah dilakukan akan menghasilkan respon yang berbeda-beda. Respon yang duhasilkan dari pengujian ini, antara lain:
a. Delay Time ( Td)
Merupakan waktu yang dibutuhkan oleh output untuk mencapai 50 % dari kondisi set point.
b. Rise Time (Tr)
Merupakan waktu yang dibutuhkan oleh output dari motor dinyalakan hingga kecepatan mencapai setpoint.
c. Peak Time (Tp)
Merupakan waktu yang dibutuhkan output pertama kali untuk mencapai nilai maksimum.
d. Settling Time (Ts)
Merupakan waktu yang dibutuhkan oleh output untuk mencapai nilai setpoint dengan toleransi yang diberikan.
Oleh karena itu, hasil respon dari masing-masing percobaan dapat diamati dari monitoring pada program LabVIEW yang dapat dilihat pada gambar dibawah ini.
21 a. Pengujian Motor DC dengan Kecepatan 250 rpm
Gambar 4.1 Respon motor dengan sistem kendali fuzzy-setting point dengan kecepatan 250 rpm
b. Pengujian Motor DC dengan Kecepatan 2000 rpm
Gambar 4.2 Respon motor dengan sistem kendali fuzzy-setting point dengan kecepatan 2000 rpm
22 c. Pengujian Motor DC dengan Kecepatan 2500 rpm
Gambar 4.3 Respon motor dengan sistem kendali fuzzy-setting point dengan kecepatan 2500 rpm
Dari data pengujian yang telah dilakukan dapat kita amati hasil respons motor terhadap referensi setting point. Data parameter dapat dilihat pada tabel berikut.
Tabel 4.1 Parameter Output Motor terhadap fuzzy-setting point
Referensi (rpm) Parameter TD (s) TR (s) TP (s) TS (s) 250 0.5465 0.655 0.905 0.955 2000 0.211 0.521 1.311 1.861 2500 0.53 0.63 0.79 3.38
23 4.2 Analisa
Untuk menguji apakah sistem kontrol fuzzy yang dibangun sudah benar perlu dibuktikan dengan menggunakan persamaan fuzzy yang sudah diterapkan pada sistem. Berikut ini adalah pembuktian jika masukan sensor memberikan nilai input error dan delta error.
4.2.1 Menghitung nilai µ fungsi keanggotaan input error & d_error
Gambar 4.4 Fungsi Keanggotaan input error
Gambar 4.5 Fungsi Keanggotaan input d_error
- µ membership dari error 90.7944
µ PB = 0 µ PM = 0 µ PS = (𝑥−𝑎) (𝑏−𝑎)= 90.7944−0 200−0 = 90.7944 200 = 0.453972 µ Z = (𝑏−𝑥) (𝑏−𝑎)= 200−90.7944 200−0 = 109.2056 200 = 0.546028 µ NS = 0 µ NM = 0
24
µ NB = 0
- µ membership dari d_error 12.2224 µ PB = 0 µ PM = 0 µ PS = (𝑥−𝑎) (𝑏−𝑎)= 12.2224−0 25−0 = 12.2224 25 = 0.488896 µ Z = (𝑏−𝑥) (𝑏−𝑎)= 25−12.2224 25−0 = 12.7776 25 = 0.511104 µ NS = 0 µ NM = 0 µ NB = 0
4.2.2 Perbandingan dengan Rule Evaluation
Tabel 4.2 Minimum Nilai µ Array
4.2.3 Menghitung Luas Trapesium berdasarkan Rule Evaluation
25 o Menghitung luas bangun untuk output PS
𝑎 = µ [𝑥][𝑦]×(𝑃𝑆[1] − 𝑃𝑆[0]) + 𝑃𝑆[0] 𝑎 = 0.453972×(5 − 0) + 0 = 2.26986 𝑏 = 𝑃𝑆[2] − (µ[𝑥][𝑦] ∗ (𝑃𝑆[2] − 𝑃𝑆[1])) 𝑏 = 10 − (0.453972 ∗ (10 − 5)) = 7.73014 𝐿𝑃𝑠. 𝑎 = ((𝑃𝑆[2] − 𝑃𝑆[0]) + (𝑏 − 𝑎)) ∗ µ[𝑥][𝑦] ∗𝑃𝑆[1] 2 𝐿𝑃𝑆. 𝑏 = ((𝑃𝑆[2] − 𝑃𝑆[0]) + (𝑏 − 𝑎)) ∗ (µ[𝑥][𝑦]/2) 𝐿𝑃𝑆. 𝑎 = ((10 − 0) + ((7.73014 − 2.26986))) ∗ (0.453972×5 2) = 17.5463355804 𝐿𝑃𝑆. 𝑏 = ((10 − 0) + ((7.73014 − 2.26986))) ∗ (0.453972 2 ) = 3.509256711608 o Menghitung luas bangun untuk output Z
𝑎 = µ [𝑥][𝑦]×(𝑍[1] − 𝑍[0]) + 𝑍[0] 𝑎 = 0.511104×(0 − (−5)) + (−5) = 0.511104 𝑏 = 𝑍[2] − (𝜇[𝑥][𝑦] ∗ 𝑍[2] − 𝑍[1] 𝑏 = 5 − (0.511104 ∗ (5 − 0) = 2.44448 𝐿𝑍. 𝑎 = ((𝑍[2] − 𝑍[0]) + (𝑏 − 𝑎)) ∗ µ[𝑥][𝑦] ∗𝑍[1] 2 𝐿𝑍. 𝑏 = ((𝑍[2] − 𝑍[0]) + (𝑏 − 𝑎)) ∗ (µ[𝑥][𝑦]/2) 𝐿𝑍. 𝑎 = ((5 − (−5)) + ((2.44448 − 0.511104))) ∗ (0.511104×0 2) = 0 𝐿𝑍. 𝑎 = ((5 − (−5)) + ((2.44448 − 0.511104))) ∗ (0.511104 2 ) = 3.049598103552 4.2.4 Menghitung defuzifikasi dengan metode centroid serta menghitung error dengan
membandingkan dengan tools fuzzy labview
𝑑𝑒𝑓𝑢𝑧𝑖𝑓𝑖𝑘𝑎𝑠𝑖 = ∫ 𝜇𝑐(𝑧) 𝑥 𝑧 𝑑𝑧 𝜇𝑐(𝑧) 𝑑𝑧
𝑑𝑒𝑓𝑢𝑧𝑖𝑓𝑖𝑘𝑎𝑠𝑖 = 𝐿 𝑃𝑆𝑎 + 𝐿 𝑍𝑎 / 𝐿 𝑃𝑆𝑏 + 𝐿 𝑍𝑏 𝑑𝑒𝑓𝑢𝑧𝑖𝑓𝑖𝑘𝑎𝑠𝑖 = 17.5463355807 + 0
26 Gambar 4.7 Hasil defuzifikasi dengan menggunakan tools fuzzy labview
27 BAB V
KESIMPULAN DAN SARAN
5.1 Kesimpulan
Berdasarkan hasil dan analisa dan pembahasan maka dapat disimpulkan sebagai berikut:
1. Perancangan alat dengan menggunakan metode fuzzy-setting point pada labview dapat mengontrol kecepatan motor DC dengan nilai setting point yang berubah-ubah. 2. Komunikasi fuzzy dengan LabVIEW dapat dilakukan dengan memanfaatkan toolkit
fuzzy yang sudah tersedia di labVIEW yang kemudian diproses oleh NI USB 6008. 3. Berdasarkan hasil percobaan yang telah dilakukan dengan memasukan set point pada
kecepatan 0-3000 rpm dengan rentan masing-masing 250 rpm, hasil keakurasian output menghasilkan error tertinggi yaitu ±118.928 pada setting point 2000 rpm dan error terendah yaitu ±2.9101 pada setting point 2500 rpm.
5.2 Saran
Untuk penelitian lebih lanjut kedepannya perlu ditambahkan beberapa saran yaitu perlu dibuatnya membership yang lebih spesifikasi lagi agar memperkecil nilai errornya.
28 DAFTAR PUSTAKA
[1] Ridwan, S,ST., Pengendalian Kecepatan Motor DC dengan PD-Logika Fuzzy Terhadap Gangguan Pengereman Berbasis Mikrokontroller, 2013.
[2] H. Samsul bachri M, Sistem Kendali hybrid PID - logika fuzzy pada pengaturan kecepatan motor.
[3] “Motor DC”.Internet :https://www.academia.edu/9091244/MAKALAH_MOTOR_DC,
[23 Mei 2016] .
[4] “Karakteristik Motor DC”. Internet : http://dokumen.tips/documents/karakteristik-motor-dc.html, [17 Mei 2016].
[5] Sumantri K.R, ST.MT., Modul Praktikum, Topik: “Logika Fuzzy.” Politeknik Negeri Batam, Batam, 2015.
[6] Zulhendri Agus dkk, “ Rancang Bangun Sistem Monitoring dan Pengendalian Level Cairan dengan LabVIEW Berbasis Mikrokontroler Mbed NXP LPC1768 ”, JITET – Jurnal Informatika dan Teknik Elektro Terapan,vol 1, pp.8, Januari 2012.
[7] “Tampilan LabVIEW “. Internet :http://elib.unikom.ac.id/files/disk1/398/jbptuni kompp-gdl-setiawanar-19859-9-babii.pdf, [17 Mei 2016]
[8] “NI USB 6008”. Internet : http://sine.ni.com/nips/cds/view/p/lang/en/nid/201986, [16 Mei 2016].
30 Lampiran A
31 Lampiran B
32 Lampiran C
33 Lampiran D
35 Lampiran E
36 Lampiran E
Hasil Pengujian Dengan Setting Point 0-3000 RPM 1. Setting Point 0
2. Setting Point 250
3. Setting Point 500
37 5. Setting Point 1000
6. Setting Point 1250
7. Setting Point 1500
38 9. Setting Point 2000 10. Setting Point 2250 11. Setting Point 2500 12. Setting Point 2750 13. Setting Point 3000
39 BIOGRAFI PENULIS
Nama : Sabar Triyani
Tempat/Tanggal lahir : Selakambang, 19 November 1995
Agama : Islam
Alamat Rumah : Kav. Saguba Asri Blok C No. 20 RT. 04, RW 17, Kel. Sei. Binti, Kec. Sagulung, Batam
Email : [email protected] Riwayat Pendidikan :
1. SMK : SMK N 5 BATAM 2. SMP : SMP N 9 BATAM
40 `
![Gambar 2.1 Konstruksi Motor DC [3]](https://thumb-ap.123doks.com/thumbv2/123dok/4893624.3475547/15.892.306.621.494.671/gambar-konstruksi-motor-dc.webp)
![Gambar 2.2 Batasan Kerja dari Motor DC [4]](https://thumb-ap.123doks.com/thumbv2/123dok/4893624.3475547/16.892.349.569.265.466/gambar-batasan-kerja-motor-dc.webp)

![Gambar 2.5 Representasi linear turun [6]](https://thumb-ap.123doks.com/thumbv2/123dok/4893624.3475547/18.892.335.580.106.479/gambar-representasi-linear-turun.webp)


![Gambar 2.14 NI USB 6008 DAQ [8]](https://thumb-ap.123doks.com/thumbv2/123dok/4893624.3475547/25.892.366.557.240.439/gambar-ni-usb-daq.webp)