TUGAS AKHIR
Diajukan Untuk Memenuhi Salah Satu Syarat Memperoleh Gelar Sarjana Teknik
Program Studi Teknik Elektro
Oleh:
Nama : Fransiskus Paskalistyo NIM : 015114057
PROGRAM STUDI TEKNIK ELEKTRO
JURUSAN TEKNIK ELEKTRO
FAKULTAS TEKNIK
UNIVERSITAS SANATA DHARMA
YOGYAKARTA
FINAL PROJECT
Presented as Partial Fulfillment of the Requirements To Obtain the Sarjana Teknik Degree
In Electrical Engineering Study Program
By:
Name : Fransiskus Paskalistyo Student Number : 015114057
ELECTRICAL ENGINEERING STUDY PROGRAM
DEPARTMENT OF ELECTRICAL ENGINEERING
FACULTY OF ENGINEERING
SANATA DHARMA UNIVERSITY
Ke hidupa n ini dipe nuhi de ng a n se ribu ma c a m ke ma nisa n te ta pi
untuk me nc a pa inya pe rlu se ribu ma c a m pe ng o rba na n
Tia da sia pa ya ng pa ling pa nda i da n pa ling bo do h di dunia ini
ka re na se tia p ya ng pa nda i itu bo le h me nja di bo do h
da n se tia p ya ng bo do h itu bo le h me nja di pa nda i (M. Ryan Saputra)
Kupersembahkan karya tulis ini kepada :
♥
Tuhan Yesus Kristus dan Bunda Maria terkasih
♥
Bapak dan Ibu Tercinta
♥
Kakakku Tersayang : Mbak Warti, Mbak Tati,
Mbak Dani, Mbak Linda dan Mbak Ningsih
♥
Keponakanku : Nico, Emil, Mia, Adna, Andre,
Febri dan Retti
♥
Keluarga besarku tercinta
♥
Kekasihku Dita tersayang
identification ini menggunakan tiga model sinyal, yaitu Autoregressive (AR), Moving Average (MA) dan Autoregressive Moving-Average (ARMA).
Setiap model sinyal menggunakan metode untuk menghasilkan nilai-nilai parameter. Model AR menggunakan covariance method. Model MA menggunakan Durbin’s method. Untuk model ARMA menggunakan tiga metode, yaitu Pade Approximation, Prony’s Method dan Shank’s Method. Proses identifikasi sistem adalah berdasarkan error terkecil dari setiap model. Metode pencarian error yang digunakan adalah least squares method.
Program simulasi untuk system identification (SID) telah berhasil dibuat dan diuji untuk menentukan model sistem. Simulasi dilakukan dengan empat macam kasus. Pertama, dengan order model rendah dan data sedikit. Kedua, dengan order model rendah dan data banyak. Ketiga, dengan order model tinggi dan data sedikit. Terakhir, dengan order model tinggi dan data banyak. Model untuk suatu input sangat bergantung pada daerah tercuplik dan nilai order. Antara model AR, MA dan ARMA yang memiliki estimasi spektrum paling baik adalah model ARMA.
signal models, those are Autoregressive (AR), Moving Average (MA) and Autoregressive Moving-Average (ARMA).
Each signal model uses a method to produce the parameters. AR model uses covariance method. MA model uses Durbin's method. There are three method for ARMA; Pade Approximation, Prony's Method, and Shank's Method. The process of system identification is based on the smallest error in each model. The method for finding the error that used is least squares method.
Simulation program for system identification (SID) have been done and tested to determining system model. The simulation is done using four cases. First, it uses low model order and few data. Second, it uses low model order and many data. Third, it uses high model order and few data. The last, it uses high model order and many data. The model for an input depends on the area taken and the order. Between model of AR, MA and of ARMA owning best spectrum estimation is ARMA model.
Kristus, karena hanya atas berkat karuniaNya, skripsi dengan judul “Program Simulasi Untuk System Identification (SID)” dapat penulis selesaikan. Skripsi ini disusun untuk memenuhi salah satu persyaratan pencapaian gelar Sarjana pada Program Studi Teknik Elektro di Universitas Sanata Dharma.
Banyak hambatan dan rintangan penulis alami selama proses penyusunan skripsi ini. Akan tetapi dengan keterlibatan dan bantuan berbagai pihak penulis dapat melalui semua dengan baik. Oleh karena itu dalam kesempatan ini, dengan penuh rasa syukur penulis mengucapkan terima kasih atas segala bantuan, dorongan, perhatian, kasih dan dukungan baik secara moril, materiil maupun spirituil kepada semua pihak, antara lain :
1. Allah Bapa di surga atas kasih, karunia, penyertaan dan bimbinganNya.
2. Bapak Ir. Greg. Heliarko, SJ., B.ST., MA., M.Sc, selaku dekan fakultas teknik. 3. Bapak Damar Wijaya, S.T., M.T., selaku pembimbing I. Terima kasih atas
bimbingan, dukungan, saran dan kesabaran bagi penulis dari awal sampai tugas akhir ini bisa selesai.
4. Ibu Ir. Th. Prima Ari Setiyani, M.T., selaku pembimbing II. Terima kasih atas koreksi, saran dan bantuannya.
8. Emirita Dita Septiyani yang tak pernah bosan selalu memberikan dukungan. 9. Saudara-saudaraku di MAPASADHA terimakasih atas kebersamaan dan
petualangan di alam bebas, khususnya Angkatan XXI Shio Kuda.
10.Teman-teman teknik elektro : Jhon Kiegent, Jekson Sianipar, Nugroho Dipo, Lamro Mega, serta teman-teman seperjuangan angkatan 2001. Tidak lupa juga untuk teman-teman angkatan 2000 dan 2002 yang selalu berbagi ilmu.
11.Pihak Staf Perpustakaan Universitas Sanata Dharma atas bantuan dalam proses peminjaman buku.
12.Dan semua pihak yang terlibat langsung maupun tidak langsung dalam proses penyusunan skripsi ini, yang tidak dapat penulis sebutkan satu persatu.
Penulis percaya bahwa segala kebaikan, bantuan, kasih serta pengorbanan yang diberikan untuk menyelesaikan skripsi ini tidaklah sia-sia dan semoga akan mendapat penghargaan yang sepadan dari Tuhan.
Dengan rendah hati penulis menyadari bahwa tugas akhir ini masih jauh dari sempurna, oleh karena itu berbagai kritik dan saran untuk perbaikan tugas akhir ini sangat diharapkan. Akhir kata, semoga tugas akhir ini dapat bermanfaat bagi semua pihak. Terima kasih.
HALAMAN PENGESAHAN... iv
HALAMAN PERNYATAAN KEASLIAN KARYA... v
HALAMAN MOTTO DAN PERSEMBAHAN... vi
INTISARI... vii
ABSTRACT...viii
KATA PENGANTAR...ix
DAFTAR ISI... xi
DAFTAR GAMBAR...xiii
DAFTAR TABEL...xvi
DAFTAR CONTOH ...xvii
BAB I PENDAHULUAN ... 1
1.1 Latar Belakang Masalah... 1
1.2 Tujuan dan Manfaat Penelitian ... 2
1.3 Batasan Masalah ... 2
1.4 Metodologi Penelitian ... 3
1.5 Sistematika Penulisan ... 3
BAB II DASAR TEORI... 5
2.1 Linear Time-Invariant Systems ... 5
2.1.1 Sistem LTI Waktu-Diskret ... 7
2.1.2 Sifat-sifat Sistem Linear Time-Invariant ... 9
2.1.2.1 Sifat Komutatif ... 10
2.1.2.2 Sifat Distributif... 10
2.1.2.3 Sifat Asosiatif ... 12
2.1.3 Persamaan Beda Koefisien-Konstan Linier... 13
2.1.4 Representasi Diagram Blok ... 15
Moving Average... 28
2.3.3.2 Metode Prony... 31
2.3.3.3 Meode Shanks ... 32
BAB III PERANCANGAN PROGRAM SIMULASI UNTUK SYSTEM IDENTIFICATION (SID)... 34
3.1 Proses Identifikasi Sistem ... 34
3.2 Proses Autoregressive... 36
3.3 Proses Moving Average... 37
3.4 Proses Autoregressive Moving Average... 39
3.5 Perancangan Desain Visual ... 46
BAB IV HASIL DAN PEMBAHASAN... 50
4.1 Tampilan Program... 50
4.2 Uji Program ... 54
4.3 System Identification... 58
4.4 Fungsi-Fungsi Matlab Yang Digunakan Dalam Program... 59
4.5 Perbandingan Kinerja Antar Model ... 62
4.5.1 Simulasi Dengan Order Rendah Data Sedikit ... 63
4.5.2 Simulasi Dengan Order Rendah Data Banyak ... 66
4.5.3 Simulasi Dengan Order Tinggi Data Sedikit... 70
4.5.4 Simulasi Dengan Order Tinggi Data Banyak... 73
4.6 Pengaruh Order Terhadap Hasil Estimasi Spektrum Model ... 77
BAB V PENUTUP ... 81
A. Kesimpulan ... 81
B. Saran... 81
Gambar 2.2 Sifat aditivitas (additivity) pada sistem linier... 5
Gambar 2.3 Sifat homogenitas (homogenity) pada sistem linier ... 6
Gambar 2.4 Sistem time-invariance dengan sinyal input dan sinyal output... 6
Gambar 2.5 Sinyal waktu diskrit terhadap impuls-impuls tergeser ... 8
Gambar 2.6 Penafsiran sifat distributif dari konvolusi untuk interkoneksi paralel dari sistem-sistem LTI... 11
Gambar 2.7 Penafsiran sifat asosiatif dari konvolusi dan sifat komutatif untuk deret interkoneksi sistem-sistem LTI ... 13
Gambar 2.8 Elemen-elemen dasar untuk representasi diagram blok... 16
Gambar 2.9 Representasi diagram blok untuk sistem waktu diskrit... 16
Gambar 2.10 Filter finite impulse response (FIR) ... 17
Gambar 2.13 Identifikasi sistem berdasarkan model Moving Average... 25
Gambar 2.14 Identifikasi sistem berdasarkan model Autoregressive... 27
Gambar 2.15 Metode untuk menentukan parameter pole pada model all-pole (ARMA) ... 31
Gambar 2.16 Metode Shanks untuk menentukan parameter zero melalui least square... 33
Gambar 3.1 Prosedur identifikasi sistem ... 35
Gambar 3.2 Diagram alir program simulasi SID secara umum... 37
Gambar 3.3 Diagram alir untuk proses Autoregressive... 38
Gambar 3.4 Diagram alir untuk proses Moving Average... 39
Gambar 3.5 Diagram alir untuk proses Autoregressive Moving Average, berdasarkan metode Pade’s Approximation... 40
Gambar 3.6 Diagram alir untuk proses Autoregressive Moving Average, berdasarkan metode Prony... 42
Gambar 3.7 Prediction error filter... 44
Gambar 4.4 Tampilan submenu Help... 52 Gambar 4.5 Tampilan data tercuplik yang akan dievaluasi ... 53 Gambar 4.6 Simulasi program dari contoh 4.1 ... 57 Gambar 4.7 Pesan Dialog system identification yang menyatakan model dari
file recycle.wav... 58 Gambar 4.8 Contoh kotak error model untuk membandingkan nilai error
model... 59 Gambar 4.9 Estimasi spektrum dari input dan model, untuk simulasi dengan
order rendah data sedikit... 64
Gambar 4.10 Estimasi spektrum dari input dan model dalam grafik yang sama, untuk simulasi dengan order rendah data sedikit... 64 Gambar 4.11 Kotak error model dan pesan dialog system identification, untuk
simulasi dengan order rendah data sedikit... 64 Gambar 4.12 Estimasi spektrum dari input dan model, untuk simulasi dengan
order rendah data banyak... 68
Gambar 4.13 Estimasi spektrum dari input dan model dalam grafik yang sama, untuk simulasi dengan order rendah data banyak... 68 Gambar 4.14 Kotak error model dan pesan dialog system identification, untuk
simulasi dengan order rendah data banyak... 69 Gambar 4.15 Estimasi spektrum dari input dan model, untuk simulasi dengan
order tinggi data sedikit ... 71
Gambar 4.16 Estimasi spektrum dari input dan model dalam grafik yang sama, untuk simulasi dengan order tinggi data sedikit ... 72 Gambar 4.17 Kotak error model dan pesan dialog system identification, untuk
simulasi dengan order tinggi data sedikit ... 73 Gambar 4.18 Estimasi spektrum dari input dan model, untuk simulasi dengan
Gambar 4.21 Estimasi spektrum untuk recycle.wav dengan order p=8 dan order q=4... 78
Gambar 4.22 Estimasi spektrum untuk recycle.wav dengan order p=14 dan order q=4... 78
Gambar 4.23 Grafik hubungan antara error model dengan nilai order p dan order q...80
Tabel 4.1 Estimasi dari parameter model AR, MA dan ARMA untuk simulasi dengan order rendah data sedikit ... 63 Tabel 4.2 Estimasi dari parameter model AR, MA dan ARMA untuk simulasi
dengan order rendah data banyak ... 67 Tabel 4.3 Estimasi dari parameter model AR, MA dan ARMA untuk simulasi
dengan order tinggi data sedikit... 70 Tabel 4.4 Estimasi dari parameter model AR, MA dan ARMA untuk simulasi
dengan order tinggi data banyak... 74 Tabel 4.5 Pengaruh order terhadap hasil estimasi spektrum model, untuk file
recycle.wav... 79
BAB I
PENDAHULUAN
1.1.
Latar Belakang Masalah
Sinyal direpresentasikan secara matematis sebagai fungsi dari satu variabel bebas atau lebih (Oppenheim, 2000). Sinyal dapat menggambarkan beraneka ragam fenomena fisik.
Data time series dapat diartikan sebagai data yang secara kronologis disusun untuk melihat pengaruh perubahan frekuensi, amplitudo dan sudut fase dalam rentang waktu tertentu (Sanjaya, 2005). Data time series seringkali menyimpan informasi yang tidak bisa dilihat secara eksplisit. Dengan menemukan informasi-informasi tersebut maka dapat dilakukan suatu peramalan data ke depan yang sangat bermanfaat.
Tahap identifikasi model menghasilkan suatu model yang sesuai untuk data. Identifikasi sistem antara lain menggunakan model all-pole filter yang disebut dengan Autoregresif (AR), all-zero filter yang disebut dengan Moving
Average (MA), atau sistem yang mengandung poles dan zeros yang disebut
dengan Autoregresif dan Moving Average (ARMA) (Proakis, 1992).
berdasarkan sampel informasi yang dimiliki oleh sistem atau objek tersebut, dan lain sebagainya.
1.2.
Tujuan dan Manfaat Penelitian
Tujuan dari tugas akhir ini adalah menghasilkan program simulasi yang dapat digunakan untuk mengindentifikasi suatu sistem.
Beberapa manfaat yang diharapkan diperoleh dari pembuatan program simulasi untuk tugas akhir ini adalah :
1
1. Membantu para dosen pengampu mata kuliah pengolahan sinyal digital dalam menjelaskan identifikasi sistem.
2. Tersedianya program simulasi bagi mahasiswa untuk membantu memahami/membandingkan model-model dari identifikasi sistem.
1.3.
Batasan Masalah
Beberapa batasan masalah dalam pembuatan program simulasi untuk identifikasi sistem adalah sebagai berikut :
1. Simulasi menggunakan program MATLAB.
2. Program simulasi dibuat dengan menggunakan tiga metode, yaitu : Pade’s approximation method, Prony’s method dan Shanks’ method.
1.4.
Metodologi Penelitian
Metode penyusunan laporan tugas akhir ini menggunakan metode-metode sebagai berikut :
1. Studi Literatur
Pencarian informasi, data-data, dan dasar teori melalui buku-buku referensi, internet, laporan ilmiah, dan makalah hasil presentasi.
2. Pengujian Program Simulasi
Membahas dan menganalisa hasil rancangan yang diperoleh dari program simulasi untuk system identification (SID).
1.5.
Sistematika Penulisan
Sistematika penulisan yang digunakan untuk proposal TA ini adalah : BAB I : Pendahuluan
Bab ini berisi latar belakang, tujuan dan manfaat penelitian, batasan masalah, metodologi penelitian dan sistematika penulisan dalam pembuatan laporan tugas akhir.
BAB II : Teori Pendukung
Bab ini berisi teori-teori pendukung yang digunakan dalam pembahasan.
BAB III : Perancangan Program Simulasi
BAB IV : Hasil dan Pembahasan
Bab ini berisi hasil simulasi dan pembahasan dari program simulasi untuk system identification (SID).
BAB V : Penutup
2.1.
Linear Time-Invariant Systems
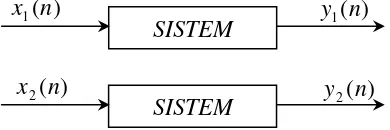
Sifat dasar sistem, yaitu dua diantaranya linearitas (linearity) dan invariansi waktu (time invariance) berperan dalam analisis sinyal dan sistem (Oppenheim, 2000). Sistem linier merupakan sistem yang memiliki sifat superposisi, yaitu jumlah tanggapan sistem dari masukan beberapa sinyal. Gambar 2.1 adalah suatu sistem dengan input x1(n) dan x2(n), output y1(n)dan y2(n).
Gambar 2.1. Sistem dengan x1(n)dan x2(n)sebagai sinyal input, y1(n)dan
) ( 2 n
y sebagai sinyal output (Oppenheim, 2000). SISTEM
SISTEM
) ( 1 n
x
) ( 2 n
x
) ( 1 n
y
) ( 2 n
y
Sistem di atas dikatakan linier jika : ) ( )
( 2
1 n x n
x + y1(n)+y2(n)
1. Tanggapan pada adalah sifat aditivitas
(additivity).
→
SISTEM )
( )
( 2
1 n x n
x + y1(n)+ y2(n)
2. Dua input x1(n) dan x2(n) memiliki nilai konstan a dan b, sehingga
[
( )] [
( )]
) ( )
( 2 1 2
1 n bx n a x n b x n
ax + = + sifat homogenitas
(homogeneity).
→
Gambar 2.3. Sifat homogenitas (homogeneity) pada sistem linier (Oppenheim, 2000). SISTEM
) ( )
( 2
1 n bx n
ax + ay1(n)+ by2(n)
Suatu sistem dikatakan time-invariance jika pergeseran pada input oleh n0 menghasilkan pergeseran pada output oleh n0. Jadi, jika y(n) adalah tanggapan
sistem time-invariant pada suatu input x(n), maka untuk pergeseran pada input mempunyai tanggapan sistem
) (n n0
x − y(n−n0). Pada hakekatnya,
time-invariance berarti bagian dari sistem yang tidak bisa diubah dengan waktu.
Jika suatu sistem dengan input dan output seperti pada gambar 2.1 adalah sistem time-invariance, maka sistem dengan input
mempunyai output seperti pada gambar 2.4,
) (n
x y(n)
(n n0
x − )
) (n n0
y −
Gambar 2.4. Sistem time-invariance dengan x(n−n0)sebagai sinyal input, )
(n n0
y − sebagai sinyal output (Oppenheim, 2000). SISTEM
) (n n0
x − y(n−n0)
2.1.1.
Sistem LTI Waktu-Diskrit
Analisis sistem waktu diskret didasarkan pada tanggapan unit impuls, yang didefinisikan sebagai keluaran bagi masukan sistem yang berbentuk unit impuls )(δk (Gabel, 1988) yaitu :
⎩ ⎨ ⎧ = ≠ = 0 , 1 0 , 0 ) ( n n n δ (2-1)
Dari gambar 2.5 (a) dapat diubah menjadi bentuk matematisnya sebagai berikut :
⎩ ⎨ ⎧ ≠ = = − ⎩ ⎨ ⎧ ≠ = = ⎩ ⎨ ⎧ − ≠ − = − = + − . 1 , 0 1 ), 1 ( ) 1 ( ) 1 ( , 0 , 0 0 ), 0 ( ) ( ) 0 ( , 1 , 0 1 ), 1 ( ) 1 ( ) 1 ( n n x n x n n x n x n n x n x δ δ δ
maka jumlah dari lima deret unit impuls dari gambar 2.5(a) adalah :
K K + − + − + − + + + − + + − + + − + = ) 3 ( ) 3 ( ) 2 ( ) 2 ( ) 1 ( ) 1 ( ) ( ) 0 ( ) 1 ( ) 1 ( ) 2 ( ) 2 ( ) 3 ( ) 3 ( ) ( n x n x n x n x n x n x n x n x δ δ δ δ δ δ δ (2-2)
Untuk setiap harga n pada persamaan (2-2), hanya satu dari sekian banyak rumus pada sisi sebelah kanan yang bukan nol. Penulisan penjumlahan dalam bentuk yang lebih ringkas (Oppenheim, 2000) adalah :
(2-3)
∑
∞ ∞ − = − = k k n k x nGambar 2.5 (b-f) menjelaskan deretan unit impuls yang tergeser,
...
...
n
0 1 2 3
4 -1
-2 -3 -4
) (n x
(a)
1 2,5
2
-2,5 1,5 2
-1,5 -1,5 -1,5
...
...
-4 -3 -2 -1 0 1 2 3 4 n
) 2 ( ) 2 (− n+
x δ
(b)
2
...
...
-4 -3 -2 -1
0 1 2 3 4 n
) 1 ( ) 1 (− n+
x δ
(c)
-1,5
...
...
-4 -3 -2 -1 0 1 2 3 4 n
) ( ) 0
( n
x δ
(d)
2,5
Gambar 2.5. Sinyal waktu diskrit terhadap impuls-impuls tergeser (Oppenheim, 2000).
...
...
-4 -3 -2 -1 0 1 2 3 4 n
) 1 ( ) 1 ( n−
x δ
(e)
1,5
...
...
-4 -3 -2 -1 0 1 2
3 4 n
) 2 ( ) 2 ( n−
x δ
(f)
Karena h(n) adalah keluaran sistem LTI pada saat masukannya δ(n) maka keluaran untuk masukan pada sistem linier yang dinyatakan persamaan (2-3) dinyatakan sebagai,
) (n
y x(n)
∑
∞ ∞ − =− =
k
k n h k x n
y( ) ( ) ( )
(2-4)
Hasil ini dirujuk sebagai jumlah konvolusi atau jumlah superposisi, dan operasi pada sisi sebelah kanan dari persamaan (2-4) dikenal sebagai konvolusi dari deretan dan . Secara simbolis operasi konvolusi direpresentasikan sebagai,
) (n
x h(n)
(2-5) )
( ) ( )
(n x n h n
y = ∗
Karakteristik dari sistem LTI ditentukan sepenuhnya oleh tanggapan impulsnya. Persamaan (2-4) menyatakan tanggapan unit impuls dari sebuah sistem LTI terhadap masukan sembarang.
2.1.2.
Sifat-sifat Sistem Linear Time-Invariant
Dalam kondisi waktu diskrit representasi menggunakan bentuk jumlah konvolusi, seperti persamaan (2-6),
∑
∞∞ − =
∗ = − =
k
n h n x k n h k x n
Sistem LTI memiliki beberapa sifat dasar konvolusi, yaitu sifat komutatif, sifat distributif dan sifat asosiatif yang akan dijelaskan pada sub bab berikut.
2.1.2.1.
Sifat Komutatif
Sifat dasar konvolusi adalah operasi komutatif, artinya dalam waktu diskrit
∑
∞∞ − =
− =
∗ = ∗
k
k n x k h n
x n h n h n
x( ) ( ) ( ) ( ) ( ) ( ) (2-7)
Pada persamaan (2-7) dapat dilihat bahwa dan saling bertukar peran. Keluaran sistem LTI dengan masukan dan tanggapan unit impuls adalah identik terhadap keluaran dari sistem LTI dengan masukan dan tanggapan unit impuls .
) (n
x h(n)
) (n
x h(n)
) (n h
) (n x
2.1.2.2.
Sifat Distributif
Sifat dasar lainnya dari konvolusi adalah sifat distributif. Khususnya, konvolusi mengatur penambahan. Persamaan (2-8) menjelaskan sifat distributif dalam waktu diskrit,
[
( ) ( )]
( ) ( ) ( ) ( ))
(n h1 n h2 n x n h1 n x n h2 n
x ∗ + = ∗ + ∗ (2-8)
) ( 1 n
h
) ( 2 n
h
+ y(n) )
(n x
) ( 1 n
y
) ( 2 n
y
(a)
) ( )
( 2
1 n h n
h +
) (n
x y(n)
(b)
Gambar 2.6. Penafsiran sifat distributif dari konvolusi untuk interkoneksi paralel dari sistem-sistem LTI (Oppenheim, 2000)
Sistem yang diperlihatkan dalam diagram blok adalah sistem-sistem LTI dengan tanggapan unit impulsnya. Kedua sistem tersebut, dengan tanggapan impuls dan mempunyai masukan identik, dan keluarannya ditambahkan. Karena,
) (
1 n
h
) (
2 n
h
(2-9)
) ( ) ( )
( 1
1 n x n h n
y = ∗
) ( ) ( )
( 2
2 n x n h n
y = ∗ (2-10)
maka sistem dari gambar 2.6 (a) mempunyai keluaran,
) ( ) ( ) ( ) ( )
(n x n h1 n x n h2 n
y = ∗ + ∗ (2-11)
dan sistem dari gambar 2.6 (b) mempunyai keluaran,
[
( ) ( )]
) ( )
(n x n h1 n h2 n
y = ∗ + (2-12)
2.1.2.3.
Sifat Asosiatif
Sifat yang penting dan bermanfaat lainnya dari konvolusi adalah asosiatif. Artinya, dalam waktu diskrit :
[
( ) ( )] [
( ) ( )]
( ))
(n h1 n h2 n x n h1 n h2 n
x ∗ ∗ = ∗ ∗ (2-13)
Penafsiran sifat asosiatif untuk sistem-sistem waktu diskrit diilustrasikan dalam gambar 2.7 (a) dan 2.7 (b).
Dalam gambar 2.7 (a)
[
( ) ( )]
( )) ( ) ( ) (
2 1
2
n h n h n x
n h n w n y
∗ ∗
= ∗ =
(2-14)
Dalam gambar 2.7 (b)
[
( ) ( )]
) (
) ( ) ( ) (
2
1 n h n
h n x
n h n x n y
∗ ∗
= ∗ =
(2-15)
) ( 1 n
h h2(n)
) (n
x w(n) y(n)
(a)
) ( ) ( )
(n h1 n h2 n
h = ∗
) (n
x y(n)
(b)
) ( ) ( )
(n h2 n h1 n
h = ∗
) (n
x y(n)
(c)
) ( 2 n
h h1(n)
) (n
x y(n)
(d)
Gambar 2.7. Penafsiran sifat asosiatif dari konvolusi dan sifat komutatif untuk deret interkoneksi sistem-sistem LTI (Oppenheim, 2000).
Gambar 2.7 (b) ekivalen dengan gambar 2.7 (c), karena bersifat komutatif. Gambar 2.7 (d) merupakan kombinasi serial dari kedua sistem seperti pada gambar 2.7 (a), tetapi dengan urutan serial terbalik. Urutan serial tidak menjadi masalah sejauh yang diperhatikan adalah tanggapan impuls secara keseluruhan.
2.1.3.
Persamaan Beda Koefisien-Konstan Linier
Dalam menganalisa dan merancang sistem, sistem-sistem dari berbagai aplikasi yang berbeda mempunyai persamaan matematis yang hampir mirip (Oppenheim, 2000). Persamaan (2-16) merupakan persamaan beda koefisien konstan-linier orde ke-N.
∑
∑
= =
− =
− M
k k N
k
ky n k b x n k
a
0 0
) ( )
Dari persamaan (2-16), dapat dinyatakan sebagai jumlah dari solusi khusus untuk persamaan (2-16) dan penyelesaian persamaan homogen
) (n y
∑
=
= − N
k
ky n k a
0
0 )
( (2-17)
Persamaan (2-16) dapat juga ditulis dalam bentuk
(2-18) ⎭
⎬ ⎫ ⎩
⎨
⎧ − − −
=
∑
∑
= =
M
k
N
k k
kx n k a y n k
b a
n y
0 1
0
) ( )
( 1
) (
Persamaan (2-18) secara langsung menyatakan keluaran pada waktu sebagai akibat dari harga masukan dan keluaran sebelumnya. Untuk menghitung , kita perlu mengetahui
n
) (n y
) ( , ), 1
(n y n N
y − K − . Oleh karena itu, jika kita diberikan masukan untuk semua dan sekumpulan kondisi tambahan seperti n
) 1 ( , ), 1 ( ),
(−N y −N+ y −
y K , maka persamaan (2-18) dapat dipecahkan untuk harga y(n) yang berurutan.
Persamaan yang mempunyai bentuk seperti persamaan (2-16) atau persamaan (2-18) disebut persamaan rekursif, karena persamaan ini menspesifikasikan prosedur rekursif untuk menentukan keluaran sebagai akibat dari masukan dan keluaran sebelumnya. Dalam kasus khusus di mana , persamaan (2-18) menjadi
) ( )
(
0 0
k n x a b n
y
M
k
k −
⎟⎟ ⎠ ⎞ ⎜⎜ ⎝ ⎛
=
∑
= (2-19)
) (n
y merupakan fungsi eksplisit dari harga masukan sekarang dan sebelumnya. Karena alasan ini, persamaan (2-19) disebut persamaan nonrekuesif, karena tidak secara rekursif menggunakan harga keluaran yang dihitung sebelumnya untuk menghitung harga keluaran sekarang. Persamaan (2-19) menggambarkan sistem LTI dan dengan perhitungan langsung, tanggapan impuls dari sistem adalah
⎪⎩ ⎪ ⎨
⎧ ≤ ≤
=
lainnya M n a
b n h
n
, 0
0 , )
( 0 (2-20)
Tanggapan impuls persamaan (2-19) mempunyai selang waktu tertentu, tanggapan ini bukan nol hanya pada interval waktu tertentu. Oleh sebab itu,
persamaan (2-19) disebut sistem tanggapan impuls tertentu (Finite Impulse Response = FIR System).
2.1.4.
Operasi Diagram Blok
+
) ( 1 n
x
) ( 2 n
x
) ( )
( 2
1 n x n
x +
(a)
) (n x
( ) b a ax(n)
D
Gambar 2.9 merupakan contoh dari sistem umpan balik, keluaran sistem diumpan balikkan melalui penundaan dan perkalian oleh koefisien dan kemudian ditambah dengan bx(n). Keluaran dari representasi diagram blok pada gambar 2.9 adalah,
) (n
x x(n−1)
(c)
Gambar 2.8. Elemen-elemen dasar untuk operasi diagram blok (Oppenheim, 2000)
(a) Penambahan (adder) (b) Perkalian dengan koefisien (c) Unit penundaan
) ( ) 1 ( )
(n ay n bx n
y =− − + (2-21)
+
D )
(n
x y(n)
b
) 1 (n− y
a −
2.2.
The Least Squares Methods
The least squares methods digunakan untuk memperkirakan parameter
model, selain itu juga digunakan pada banyak aplikasi dalam pemrosesan sinyal (Dwight, 1995). The orthogonality principle merupakan salah satu metode yang digunakan dalam The least squares methods, yang diterapkan pada berbagai macam masalah-masalah persamaan linier. Gambar 2.10 merupakan sebuah filter
finite impulse response (FIR) dengan koefisien . merupakan
input dan adalah output yang diinginkan, maka keluaran untuk adalah
output yang diinginkan ditambah dengan noise, seperti pada persamaan (2-22)
p
o h h
h , 1,K, x(n)
) (n
y x(n)
) ( ) ( )
(n s n w n
x = + (2-22)
dengan y(n)=s(n).
Data yang diberikan adalah, x(0),x(1),K,x(N) dan y(0),y(1),K,y(N). Gambar 2.10 memiliki input x(n) dan output
∑
=
− = p
k
k n x k h n
y
0
) ( ) ( )
(
ˆ (2-23)
…
1
−
z z−1 z−1
+ +
…
+) (n x
0
h h1 h2 hp
) ( ˆ n y
error dari filter FIR pada gambar 2.10 adalah :
∑
= − − = − = p k k n x k h n y n y n y n e 0 ) ( ) ( ) ( ) ( ˆ ) ( ) ( (2-24)Pendekatan least squares untuk meminimalkan jumlah error (minimize sum of square error) ditunjukkan pada persamaan (2-25) berikut :
) ( 0 2 n e N n
∑
= = ε (2-25)Jika data x(n) dimasukkan, maka output saat p adalah :
[
]
⎥ ⎥ ⎥ ⎥ ⎥ ⎦ ⎤ ⎢ ⎢ ⎢ ⎢ ⎢ ⎣ ⎡ = + + + = − − 0 1 0 1 ) ( ) 1 ( ) 0 ( ) ( ) 1 ( ) 0 ( ) ( ˆ h h h p x x x h p x h x h x p y p p p p M K K (2-26)Output berikutnya adalah :
Dari persamaan (2-26) dan (2-27) dapat dibentuk menjadi sebuah matrik seperti ditunjukkan pada persamaan (2-28).
⎥ ⎥ ⎥ ⎥ ⎥ ⎦ ⎤ ⎢ ⎢ ⎢ ⎢ ⎢ ⎣ ⎡ ⎥ ⎥ ⎥ ⎥ ⎦ ⎤ ⎢ ⎢ ⎢ ⎢ ⎣ ⎡ + + + = ⎥ ⎥ ⎥ ⎥ ⎦ ⎤ ⎢ ⎢ ⎢ ⎢ ⎣ ⎡ + + − 0 1 ) ( ) 1 ( ) ( ) 1 ( ) 2 ( ) 1 ( ) ( ) 1 ( ) 0 ( ) ( ˆ ) 1 ( ˆ ) ( ˆ h h h N p x N x N x p x x x p x x x N p y p y p y p p M K M K M M K K M (2-28) atau
yˆ = Xh (2-29)
Matrik X disebut data matrik dan memiliki dimensi , diasumsikan . Error yang dimiliki dimensi
) 1 ( ) 1
(N+ × p+
adalah :
p
N > (N+1)
Untuk meminimalkan error digunakan persamaan (2-31) berikut :
Ada dua cara untuk meminimalkan error (minimize sum of square error), yaitu : 1. Dengan subtitusi persamaan (2-29) ke persamaan (2-30).
2. Dengan menerapkan the orthogonality principle. h
X y yˆ = − y
e= − (2-30)
(2-31) e
et =
Dengan menggunakan cara pertama
) (
)
(y−Xh t y−Xh =
ε (2-32)
Jika dan yt =0 ht =0, maka diperoleh :
y X h X
Xt = t (2-33)
atau (2-34) y X X X
h t 1 t
)
( −
=
Matrik yang dikalikan dengan pada persamaan (2-34) disebut dengan Pseudoinverse y # X . t t X X X
X# =( )−1 (2-35)
Sehingga persamaan (2-34) menjadi
(2-36) y X y X X X
h =( t )−1 t = #
Atau dapat juga ditulis dengan persamaan yang berbeda untuk mencari the sum of square error (ε), dari persamaan (2-32)
0 = t
h , maka dari persamaan (2-37) diperoleh Jika e y h X y y h X y y y t t t t = − = − = ) ( ε (2-38) Contoh 2.1
Jika data input dan output yang diinginkan adalah :
maka dari persamaan (2-36) untuk 2-tap filter (p=1) adalah
Transpose dari matrik X adalah,
Perkalian antara matrik X dengan matrix Xtranspose (Xt) nya adalah,
dan invers-nya adalah,
{ } { }
{ (0), (1), , ( )} {1, 1,1, 1,1, 1}
#
X
Pseudoinverse adalah,
⎥ ⎦ ⎤ ⎢ ⎣ ⎡ = ⎥ ⎦ ⎤ ⎢ ⎣ ⎡ − − − − − ⎥ ⎦ ⎤ ⎢ ⎣ ⎡ = = − 9 13 6 16 3 15 12 10 17 5 29 1 3 3 1 2 1 3 2 2 1 1 19 22 22 27 29 1 ) ( 1
# t t
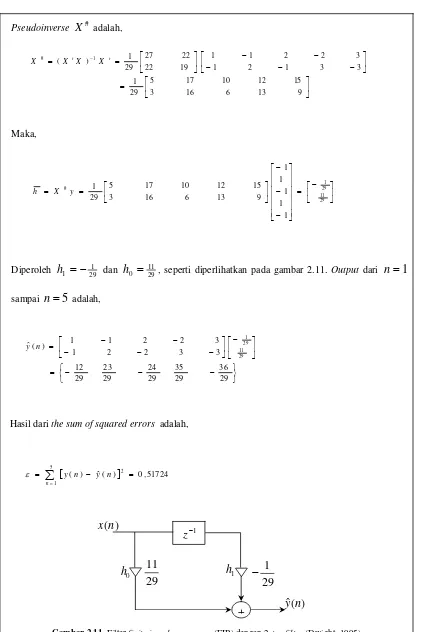
X X X X Maka, ⎥ ⎦ ⎤ ⎢ ⎣ ⎡ − = ⎥ ⎥ ⎥ ⎥ ⎥ ⎥ ⎦ ⎤ ⎢ ⎢ ⎢ ⎢ ⎢ ⎢ ⎣ ⎡ − − − ⎥ ⎦ ⎤ ⎢ ⎣ ⎡ = = 29 11 29 1 # 1 1 1 1 1 9 13 6 16 3 15 12 10 17 5 29 1 y X h 1 = n 29 1 1 =−
h 2911
0 =
h , seperti diperlihatkan pada gambar 2.11. Output dari
Diperoleh dan
sampai n=5 adalah,
⎭ ⎬ ⎫ ⎩ ⎨ ⎧− − − = ⎥ ⎦ ⎤ ⎢ ⎣ ⎡ − ⎥ ⎦ ⎤ ⎢ ⎣ ⎡ − − − − − = 29 36 29 35 29 24 29 23 29 12 3 3 2 2 1 3 2 2 1 1 ) ( ˆ 29 11 29 1 n y
Hasil dari the sum of squared errors adalah,
[ ( ) ˆ( )] 0,51724 5 1 2 = − = ∑ = n n y n y ε
Gambar 2.11. Filter finite impulse response (FIR) dengan 2-tap filter (Dwight, 1995)
1 − z + ) (n x 0
h h1
Dengan menggunakan cara kedua, yaitu dengan menerapkan the orthogonality principle. Jika dimiliki data input dan output seperti pada persamaan (2-39) dan (2-40) untuk desain 3-tap filter, maka matrik X dan output yang diinginkan adalah,
⎥ ⎥ ⎥ ⎥ ⎦ ⎤ ⎢ ⎢ ⎢ ⎢ ⎣ ⎡ − − = ⎥ ⎥ ⎥ ⎥ ⎦ ⎤ ⎢ ⎢ ⎢ ⎢ ⎣ ⎡ − − − − − − = 1 1 1 1 3 3 2 3 2 2 2 2 1 2 1 1 y X h X y
e= −
Dari persamaan (2-30) diperoleh maka,
0 )
( − =
= X y Xh
e X t t
atau
h X X y
X t = ( t )
Transpose dari matrik X adalah,
⎥ ⎥ ⎥ ⎦ ⎤ ⎢ ⎢ ⎢ ⎣ ⎡ − − − − − − = 3 3 2 2 3 2 2 1 2 2 1 1 t X
Perkalian antara matrik X dengan matrix Xtranspose (Xt) nya adalah,
⎥ ⎥ ⎥ ⎦ ⎤ ⎢ ⎢ ⎢ ⎣ ⎡ − − − = 26 21 16 21 18 13 16 13 10 ) (X tX
dan invers-nya adalah,
4 21 16 18 13 16 26 16 21 13 ) 13 ( 26 21 21 18 10 )
( 1 =
− − + − − − − − − = − X X t # X
Pseudoinverse adalah,
(2-41) t t X X X X # 1
)
( −
⎥ ⎥ ⎥ ⎦ ⎤ ⎢ ⎢ ⎢ ⎣ ⎡ − − − = ⎥ ⎥ ⎥ ⎦ ⎤ ⎢ ⎢ ⎢ ⎣ ⎡ − − − − − − ⎥ ⎥ ⎥ ⎦ ⎤ ⎢ ⎢ ⎢ ⎣ ⎡ − − = = − 75 , 0 25 , 0 75 , 0 25 , 1 5 , 0 5 , 0 5 , 0 5 , 0 75 , 0 25 , 1 75 , 1 25 , 1 3 3 2 2 3 2 2 1 2 2 1 1 11 2 15 2 4 2 15 2 27 4 1 ) ( 1
# X tX X t
X Maka, ⎥ ⎥ ⎥ ⎦ ⎤ ⎢ ⎢ ⎢ ⎣ ⎡ − = ⎥ ⎥ ⎥ ⎥ ⎦ ⎤ ⎢ ⎢ ⎢ ⎢ ⎣ ⎡ − − ⎥ ⎥ ⎥ ⎦ ⎤ ⎢ ⎢ ⎢ ⎣ ⎡ − − − = = 1 0 1 1 1 1 1 75 , 0 25 , 0 75 , 0 25 , 1 5 , 0 5 , 0 5 , 0 5 , 0 75 , 0 25 , 1 75 , 1 25 , 1 #y X h 1
2 =−
h
Diperoleh h0 =1,h1 =0 dan , seperti diperlihatkan pada gambar (2.12). Hasil dari the sum of squared errors adalah,
[ ] 0
1 0 1 3 3 2 3 2 2 2 2 1 2 1 1 1 1 1 1 1 1 1 1 ) ( = ⎟ ⎟ ⎟ ⎟ ⎟ ⎠ ⎞ ⎜ ⎜ ⎜ ⎜ ⎜ ⎝ ⎛ ⎥ ⎥ ⎥ ⎦ ⎤ ⎢ ⎢ ⎢ ⎣ ⎡ − ⎥ ⎥ ⎥ ⎥ ⎦ ⎤ ⎢ ⎢ ⎢ ⎢ ⎣ ⎡ − − − − − − − ⎥ ⎥ ⎥ ⎥ ⎦ ⎤ ⎢ ⎢ ⎢ ⎢ ⎣ ⎡ − − − − = − =
= d te d t d Xh
ε
Gambar 2.12. Filter finite impulse response (FIR) dengan 3-tap filter (Dwight, 1995)
1
−
z z−1
+ +
) (n x
0
h 1 h1 0 h2 -1
2.3.
Identifikasi Sistem
2.3.1.
Identifikasi Sistem Berdasarkan Model
Moving Average
Fungsi alih sistem untuk model moving average adalah sebagai berikut :
∑
= − = q k k kz b z H 0 ) ( ˆ (2-42)Gambar 2.13 memiliki input dengan merupakan output dari sistem. merupakan output dari model, seperti pada persamaan (2-43).
) (n
x y(n)
) ( ˆ n y N n k n x b n y q n
k ( ), 1,2,...,
) ( ˆ 0 = − =
∑
=N»q (2-43)
Selisih antara output sistem dengan output model didefinisikan sebagai kesalahan (error), .
) ( ˆ n y ) (n y ) (n e
-Dari gambar 2.13 diperoleh error e(n) sebagai, ) ( ˆ ) ( )
(n y n y n
e = − (2-44)
N n k n x b n y n e q k
k ( ), 1,2, ,
) ( ) ( 0 K = − − =
∑
= (2-45)Dengan pendekatan least-squares, untuk meminimalkan jumlah kesalahan (minimize the sum of squared errors) dapat dilihat pada persamaan (2-46),
∑
= = N n n e q 1 2 ) ( ) ( ε 2 1 0 ) ( ) (∑
∑
= = − − = N n q kkx n k
b n
y (2-46)
2.3.2.
Identifikasi Sistem Berdasarkan Model
Autoregressive
Persamaan untuk sistem model autoregressive adalah,
∑
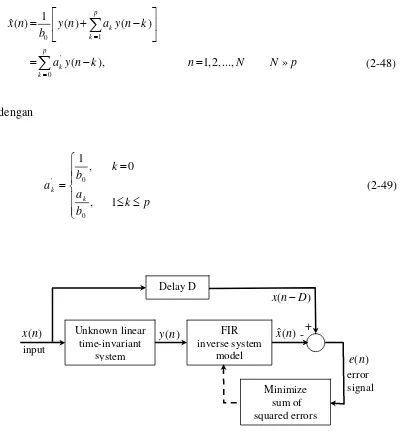
= − + = p k kz a b z H 1 1 0 1 ) ( ˆ (2-47)Gambar (2.14) merupakan identifikasi sistem berdasarkan model autoregressive, cascade dari dua sistem menghasilkan sistem identitas. Persamaan (2-48)
..., , 2 , 1 ), ( ) ( ) ( 1 ) ( ˆ 0 ' 1 0 N n k n y a k n y a n y b n x p k k p k k = − = ⎥ ⎦ ⎤ ⎢ ⎣ ⎡ − + =
∑
∑
= =N»p (2-48)
dengan ⎪ ⎪ ⎩ ⎪⎪ ⎨ ⎧ ≤ ≤ = = p k b a k b a k k 1 , 0 , 1 0 0 ' (2-49)
Gambar 2.14. Identifikasi system berdasarkan model Autoregressive (Proakis, 1992). Unknown linear time-invariant system FIR inverse system model Minimize sum of squared errors Delay D ) (n x input ) (n
y xˆ(n)
) (n D
x − -) (n e error signal +
Selisih antara output yang diinginkan dengan output nyata
menghasilan error seperti pada persamaan (2-44). Dengan pendekatan least-squares, untuk meminimalkan jumlah kesalahan (minimize the sum of
squared errors) dapat dilihat pada persamaan (2-50),
2 1 0 ' 2 1 2 1 ) ( ) ( ) ( ˆ ) ( ) ( ) , (
∑
∑
∑
∑
= = = = − − − = − − = = N n p k k N n N n k n y a D n x n x D n x n e D p ε (2-50)2.3.3.
Identifikasi Sistem Berdasarkan Model
Autoregresive
Moving Average
Persamaan sistem untuk model autoregressive moving average adalah,
∑
∑
∑
∞ = − = − = − = + = 0 1 0 ) ( 1 ) ( ˆ k k p k k k q k k k z k h z a z b z H (2-51)dengan adalah unit sample response. Dalam proses autoregressive moving
average (ARMA), ada tiga metode yang digunakan dalam tugas akhir ini, yaitu
Pade’s Approximation, Prony’s method dan Shanks’ method seperti yang akan
dijelaskan pada sub bab berikutnya.
) (k h
2.3.3.1.
Metode Aproksimasi Pade (Pade’s Approximation)mencari koefisien dan . Dalam metode Pade’s Approximation, ada dua tahap yang digunakan untuk mencari koefisien dan . Tahap 1, adalah untuk mencari koefisien menggunakan matrik pada persamaan (2- 52),
) (k
ap bq(k)
) (k
ap bq(k)
) (k ap ⎥ ⎥ ⎥ ⎥ ⎦ ⎤ ⎢ ⎢ ⎢ ⎢ ⎣ ⎡ = ⎥ ⎥ ⎥ ⎥ ⎥ ⎦ ⎤ ⎢ ⎢ ⎢ ⎢ ⎢ ⎣ ⎡ ⎥ ⎥ ⎥ ⎥ ⎦ ⎤ ⎢ ⎢ ⎢ ⎢ ⎣ ⎡ + − + + − + + + − + 0 0 0 ) 1 ( ) 1 ( 1 ) ( ) 1 ( ) ( ) 2 ( ) 1 ( ) 2 ( ) 1 ( ) ( ) 1 ( K K K K K K K K K p p a a q x p q x p q x p q x q x q x p q x q x q x (2-52)
matrik pada persamaan (2-53) digunakan untuk mencari koefisien denominator,
⎥ ⎥ ⎥ ⎥ ⎦ ⎤ ⎢ ⎢ ⎢ ⎢ ⎣ ⎡ + + + − = ⎥ ⎥ ⎥ ⎥ ⎥ ⎦ ⎤ ⎢ ⎢ ⎢ ⎢ ⎢ ⎣ ⎡ ⎥ ⎥ ⎥ ⎥ ⎦ ⎤ ⎢ ⎢ ⎢ ⎢ ⎣ ⎡ − + − + + − + + − − ) ( ) 2 ( ) 1 ( ) ( ) 2 ( ) 1 ( ) ( ) 2 ( ) 1 ( ) 1 ( ) ( ) 1 ( ) 1 ( ) 1 ( ) ( p q x q x q x p a a a q x p q x p q x p q x q x q x p q x q x q x p p p K K K K K K K K K (2-53)
Setelah mendapatkan koefisien , tahap kedua adalah menentukan koefisien , dalam bentuk matrik,
Tabel 2.1 merupakan metode aproksimasi Pade dengan dua langkah pendekatan untuk mencari model parameter.
⎥ ⎥ ⎥ ⎥ ⎥ ⎥ ⎥ ⎦ ⎤ ⎢ ⎢ ⎢ ⎢ ⎢ ⎢ ⎢ ⎣ ⎡ = ⎥ ⎥ ⎥ ⎥ ⎥ ⎥ ⎥ ⎦ ⎤ ⎢ ⎢ ⎢ ⎢ ⎢ ⎢ ⎢ ⎣ ⎡ ⎥ ⎥ ⎥ ⎥ ⎥ ⎥ ⎦ ⎤ ⎢ ⎢ ⎢ ⎢ ⎢ ⎢ ⎣ ⎡ − − − ⎥ ⎥ ⎥ ⎥ ⎦ ⎤ ⎢ ⎢ ⎢ ⎢ ⎣ ⎡ + + + − = ⎥ ⎥ ⎥ ⎥ ⎥ ⎦ ⎤ ⎢ ⎢ ⎢ ⎢ ⎢ ⎣ ⎡ ⎥ ⎥ ⎥ ⎥ ⎦ ⎤ ⎢ ⎢ ⎢ ⎢ ⎣ ⎡ − + − + + − + + − − ) ( ) 2 ( ) 1 ( ) 0 ( ) ( ) 2 ( ) 1 ( 1 ) ( ) 2 ( ) 1 ( ) ( 0 ) 0 ( ) 1 ( ) 2 ( 0 0 ) 0 ( ) 1 ( 0 0 0 ) 0 ( ) ( ) 2 ( ) 1 ( ) ( ) 2 ( ) 1 ( ) ( ) 2 ( ) 1 ( ) 2 ( ) ( ) 1 ( ) 1 ( ) 1 ( ) ( q b b b b p a a a p q x q x q x q x x x x x x x p q x q x q x p a a a q x p q x p q x p q x q x q x p q x q x q x q q q q p p p p p p M M K M M M M K K K M M K M K M M K K
Tabel 2.1. Pade’s Approximation untuk pemodelan sinyal
Denominator coefficients
Numerator coefficients
Tanggapan dari model adalah
0 ), ( ) ( ) ( ) ( 1 1 ≥ − + − − = =
∑
∑
= = n k n b k n h a n h n y q k k p kk δ (2-55)
k n= , kecuali saat
2.3.3.2.
Metode PronyLeast squares method dapat digunakan untuk mengidentifikasi pole
parameter ak dari model. Pada gambar 2.15 dengan x(n)=δ(n) dihasilkan sistem dengan output ) . Kemudian, untuk dapat ditentukan pole
parameter untuk meminimalkan error.
(n
hd n>q
k a q n k n h a n h d p k k
d =−
∑
− >= , ) ( ) ( ˆ 1 (2-58)
Gambar 2.15. Metode untuk menentukan parameter pole pada model all-pole (ARMA) (Proakis, 1992)
Unknown linear time-invariant system Linear one-step predictor Minimize sum of squared errors
for n>q
-) (n
δ hd(n)
) (n e ) ( ˆ n hd +
Selisih antara dengan menghasilkan error . Dengan pendekatan least-squares, untuk meminimalkan jumlah kesalahan (minimize the sum of squared errors) dapat dilihat pada persamaan (2-59),
) ( ˆ n hd ) (n
hd e(n)
Metode ini dikenal sebagai metode Prony. Metode ini tidak memberikan hasil yang akurat untuk bk, terutama saat ada noise pada sinyal yang diamati.
2.3.3.3.
Metode ShanksPendekatan yang lebih baik untuk mencari adalah dengan memanfaatkan least squares method.
k
b
Untuk sistem all-pole,
∑
= −
+
= p
k
k k p
z a z
H
1
ˆ 1
1 )
( (2-60)
Tanggapan untuk unit sample δ(n) adalah
∑
=
≥ +
− −
= p
k
kv n k n n
a n
v
1
0 ,
) ( ) ( ˆ )
( δ (2-61)
jika digunakan untuk membangkitkan all-zero maka fungsi sistemnya adalah,
) (n v
k q
k k
q z b z
H −
=
∑
=
0 )
( (2-62)
Gambar 2.16 menggambarkan metode Shank untuk menentukan model parameter melalui least squares.
∑
=
− = q
k k
d n bv n k
h
0
) ( )
(
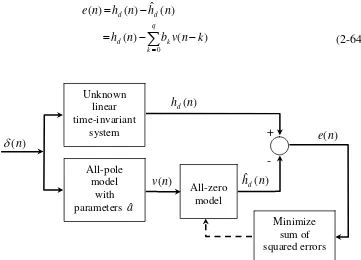
Error didefinisikan sebagai selisih antara dengan seperti pada persamaan (2-64), ) ( ˆ n hd ) (n hd ) (n e
∑
= − − = − = q k k d d d k n v b n h n h n h n e 0 ) ( ) ( ) ( ˆ ) ( ) ( (2-64) Unknown linear time-invariant system All-pole model with parameters aˆAll-zero model Minimize sum of squared errors ) (n δ ) (n hd ) (n v ) (n e ) ( ˆ n hd +
-Gambar 2.16. Metode Shanks untuk menentukan parameter zero melalui least square
(Proakis, 1992).
Dengan pendekatan least-squares, untuk meminimalkan jumlah kesalahan (minimize the sum of squared errors) dapat dilihat pada persamaan (2-65),
[ ]
2 0 0 2 0 ) ( ) ( ) ( ) (∑
∑
∑
= = = ⎥ ⎦ ⎤ ⎢ ⎣ ⎡ − − = = N n q k k d N n k n v b n h n e q ε (2-65)Jika ditentukan dengan menggunakan Prony’s method, maka Shank’s
method digunakan untuk mencari koefisien untuk menghasilkan model
yang lebih akurat.
Program simulasi System Identification (SID) ini menggunakan program aplikasi MATLAB. Program simulasi ini dibuat menggunakan Graphical User Interface (GUI) yang disediakan oleh MATLAB.
3.1
Proses Identifikasi Sistem
Identifikasi Sistem adalah memperkirakan suatu model dari sistem berdasarkan input data. Prosedur yang perlu diperhatikan untuk menentukan model suatu sistem adalah :
1. Input data
2. Model sinyal (struktur model)
3. Kriteria untuk menentukan model, berdasarkan informasi data (metode identifikasi)
PERANCANGAN
MENENTUKAN MODEL
MENGUJI MODEL
MODEL TERBAIK
NOT ACCEPTED
ACCEPTED
Gambar 3.1. Prosedur identifikasi sistem
1. Perancangan, merupakan tahapan untuk merancang dan mengumpulkan data dari proses untuk diidentifikasi. Selanjutnya menguji data-data tersebut.
2. Menentukan model, merupakan tahapan untuk memilih dan menggambarkan suatu struktur model yang terbaik menurut input data, dan memiliki kriteria yang cocok.
3. Menguji model, merupakan tahapan untuk melakukan proses identifikasi untuk menghasilkan model yang baik.
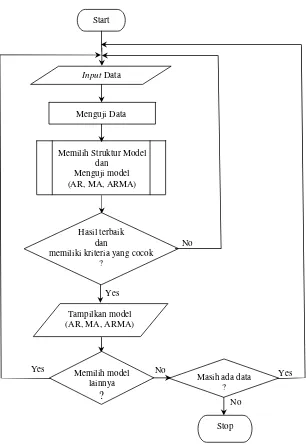
Gambar 3.2 menunjukkan diagram alir program secara umum. Pada program simulasi SID ini digunakan tiga model sinyal, yaitu :
1. AR(p), disebut dengan proses Autoregressive. 2. MA(q), disebut dengan proses Moving Average.
3. ARMA(p, q), disebut dengan proses Autoregressive Moving Average.
Dari ketiga model sinyal tersebut dipilih salah satu model, setelah dihasilkan sinyal yang cocok dan sesuai dengan kriteria maka proses berhenti. Program simulasi ini juga dapat membandingkan hasil dari ketiga model tersebut, yaitu dengan melakukan proses kembali untuk model yang berbeda, sehingga dapat dibandingkan model yang terbaik.
3.2
Proses
Autoregressive
Pada proses autoregressive terjadi proses waktu tunda. Untuk model autoregressive, sinyal dengan waktu tunda (delay) memiliki keluaran x(n−D), yang merupakan output model. Sedangkan input yang bukan merupakan model autoregressive memiliki keluaran xˆ(n), yang merupakan output sistem LTI.
Gambar 3.2. Diagram alir program simulasi SID secara umum
Hasil terbaik dan
memiliki kriteria yang cocok ?
Start
Input Data
Menguji Data
No
Yes
Masih ada data ?
Yes Memilih model No
lainnya
?
Yes
No
Stop Tampilkan model
(AR, MA, ARMA) Memilih Struktur Model
dan Menguji model (AR, MA, ARMA)
3.3.
Proses
Moving Average
Jika input adalah sistem LTI, maka output yang dihasilkan merupakan output sistem. Sedangkan jika input merupakan model moving average, maka output yang dihasilkan merupakan output model.
Gambar 3.3. Diagram alir untuk proses Autoregressive Return
Start
Input model = AR
Autoregressive
Model ?
FIR inverse system model
Output
) ( ˆ n x
Delay D
Output
) (n D
x −
N
Y Linear-time invariant system
Error Signal
) (n
Selisih antara output model yˆ(n) dengan output sistem y(n) , menghasilkan error signal e(n). Flowchart untuk proses moving average adalah sebagai berikut :
Gambar 3.4. Diagram alir untuk proses Moving Average Return
Start
Output
) ( ˆ n y
Output
) (n y
Y
N Input model = MA
Moving Average
Model ?
Linear-time invariant system
Error Signal
3.4.
Proses
Autoregressive Moving Average
Pada metode autoregressive moving average (ARMA) input dapat berupa unit impulse. Ada tiga metode yang digunakan untuk proses model ARMA ini,
yaitu : Pade’s Approximation, Prony’s Method dan Shanks’ Method. )
(n
Gambar 3.5 merupakan diagram alir untuk proses Autoregressive Moving
Average (ARMA) menggunakan Pade’s Approximation. Pada metode ini, yang
ditentukan pertama adalah mencari koefisien ap(k) dan bq(k) terlebih dahulu
berdasarkan input data. Setelah koefisien ap(k) dan bq(k) didapat, maka dapat
ditentukan aproksimasi input yang kemudian dapat dicari model tanggapan input )
( ˆ n
x . Sistem LTI yang bukan model ARMA merupakan sistem LTI dengan
output sistem x(n).
Gambar 3.5. Diagram alir untuk proses AutoregressiveMoving Average, berdasarkan Metode Pade’s Approximation.
Tentukan
orderp dan q
Start
Metode Pade’s Approximation
? N
Y
Input model = ARMA
Output
) (n x
Y
N ARMA
Model ?
Linear-time invariant system
C
Gambar 3.5. (Lanjutan) Diagram alir untuk proses AutoregressiveMoving Average, berdasarkan Metode Pade’s Approximation.
Tentukan approximation N
Y Y
N
Apakah
0 ) (k = ap
?
Tentukan nilai ap(k)
Tentukan nilai bq(k)
Apakah
0 ) (k = bq
?
Tangapan model xˆ(n)
Error Signal
) (n
e = x(n) - xˆ(n)
Subtitusi nilai ap(k) dan bq(k) ke Persamaan
∑
=
−
+
= p
k
k p k z
a b z
H
1 ) ( 1
) 0 ( )
(
Return
C D
Gambar 3.6. Diagram alir untuk proses AutoregressiveMoving Average, berdasarkan Metode Prony.
Return Start
Metode Prony
?
Output
) ( ˆ n hd N
Y
Input model = ARMA
Linear one-step predictor
Output
) (n hd Y
N ARMA
Model ?
Linear-time invariant system
Error Signal
) (n
Gambar 3.6 merupakan diagram alir untuk proses Autoregressive Moving Average (ARMA) menggunakan Prony’s Method. Pada metode ini, output yang
merupakan model ARMA akan diteruskan pada linear one-step predictor, dan akan menghasilkan output model xˆ(n). Sedangkan sistem LTI yang bukan model ARMA merupakan sistem LTI dengan output sistem x(n). Linear prediction merupakan suatu topik yang penting dalam pengolahan sinyal digital, karena diterapkan dalam berbagai aplikasi.
Jika dalam suatu sistem memiliki urutan input , dan adalah output. Maka merupakan output sistem yang menyatakan suatu
one-step prediction. Jika output adalah , maka menyatakan suatu
k-step ahead prediction.
n
X X
X1, 2,K, Xn+k
1
+
= Xn
Y
k n
X + Xn+k
Dalam suatu one-step prediction, menyatakan prediksi linier terbaik (best linear predictor), seperti ditunjukkan pada persamaan (3-1) berikut,
1 ˆ + n X
∑
= + =− n i i in a X
Gambar 3.7 menunjukkan suatu sistem yang menyatakan one-step prediction dengan input xndan output sistem xn −xˆn.
Gambar 3.7. Prediction error filter
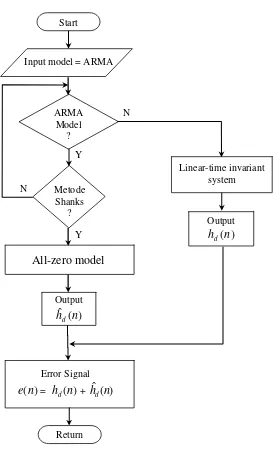
Gambar 3.8 merupakan diagram alir untuk proses Autoregressive Moving
Average (ARMA) menggunakan Shanks’ Method. Pada metode ini, output dari
model all-pole adakah , yang mana ini digunakan untuk membangkitkan suatu all-zero filter. sebagai input model all-zero
menghasilkan output model. Flowchart untuk proses Autoregressive Moving
Average menggunakan Shanks’ Method adalah sebagai berikut :
) (n
v v(n)
Gambar 3.8. Diagram alir untuk proses AutoregressiveMoving Average, berdasarkan Metode Shanks.
Return Start
Metode Shanks
?
Output
) ( ˆ n hd N
Y
Input model = ARMA
All-zero model
Output
) (n hd
Y
N ARMA
Model ?
Linear-time invariant system
Error Signal
) (n
3.5.
Perancangan Desain Visual
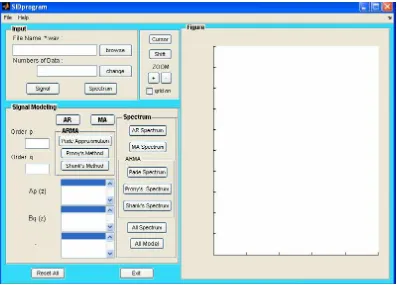
Perancangan desain visual merupakan rancangan secara visual untuk implementasi program simulasi System Identification (SID). Tampilan simulasi SID ini membandingkan keluaran sinyal antara model Autoregressive (AR), Moving Average (MA) dan Autoregressive Moving Average (ARMA). Gambar
3.9 merupakan layout program untuk simulasi SID.
Gambar 3.9 terdiri dari tiga buah panel utama, yaitu panel input, panel signal modeling dan panel figure. Selain itu terdiri dari dua menu, yaitu menu file
1) Panel Input
a) Tombol browse, digunakan untuk mengambil file input berektensi *.wav dari komputer yang digunakan.
b) Tombol change, digunakan untuk menentukan rentang data tercuplik yang akan dievaluasi, sehingga user tidak perlu menggunakan seluruh jumlah data input dari file *.wav. Jika tombol change ditekan, maka akan keluar tampilan yang meminta user untuk mengisi data awal dan data akhir dari data tercuplik yang akan dievaluasi. Jumlah data tercuplik yang akan dievaluasi adalah data akhir – data awal.
c) Tombol signal, digunakan untuk menampilkan model sinyal sampel dari file *.wav tercuplik.
d) Tombol spectrum, digunakan untuk menampilkan spektrum dari sinyal sampel file *.wav tercuplik.
e) Kotak teks file name *.wav, adalah kotak tempat untuk menampilkan nama file input *.wav yang akan dievaluasi.
f) Kotak teks sum of input, adalah kotak tempat untuk menampilkan jumlah data tercuplik dari file input *.wav yang akan dievaluasi.
2) Panel Signal Modeling
a) Kotak teks order p, digunakan untuk memasukkan nilai input untuk p. b) Kotak teks order q, digunakan untuk memasukkan nilai input untuk q. c) Tombol AR, digunakan untuk menampilkan parameter AR.
e) Tombol Pade Approximation, digunakan untuk menampilkan parameter ARMA dengan metode Pade Approximation.
f) Tombol Prony’s Method, digunakan untuk menampilkan parameter ARMA dengan metode Prony’s Method.
g) Tombol Shank’s Method, digunakan untuk menampilkan parameter ARMA dengan metode Shank’s Method.
h) Tombol AR spectrum, digunakan untuk menampilkan spektrum dari model Autoregressive.
i) Tombol MA spectrum, digunakan untuk menampilkan spektrum dari model Moving Average.
j) Tombol Pade spectrum, digunakan untuk menampilkan spektrum dari model ARMA menggunakan metode Pade approximation..
k) Tombol Prony’s spectrum, digunakan untuk menampilkan spektrum dari model ARMA menggunakan Prony’s Method.
l) Tombol Shank’s spectrum, digunakan untuk menampilkan spektrum dari model ARMA menggunakan Shank’s Method.
m) Tombol All Spectruml, digunakan untuk menampilkan semua model spektrum dari model AR, MA dan ARMA dalam grafik yang berbeda pada layar monitor.
o) Kotak Ap (z), digunakan untuk menampilkan koefisien-koefisien dari Ap (z).
p) Kotak Bq (z), digunakan untuk menampilkan koefisien-koefisien dari Bq (z).
q) Kotak Error/Mean Square Error, digunakan untuk menampilkan Error/MSE.
3) Panel Figure
Terdiri dari axes yang merupakan tempat untuk menampilkan model sinyal atau spektrum. Panel figure didukung oleh panel yang dapat membantu melihat tampilan pada axes, panel tersebut terdiri dari :
a) Tombol Legend, digunakan untuk menampilkan/menghilangkan keterangan untuk sinyal/spektrum yang ditampilkan.
b) Tombol Shift, digunakan untuk menggeser sinyal/spektrum yang ditampilkan.
c) Tombol Cursor, digunakan untuk mengetahui posisi puncak sinyal/spektrum yang ditampilkan berdasarkan sumbu x dan sumbu y. d) Tombol Zoom, digunakan untuk memperbesar (+) atau memperkecil
(-) sinyal/spektrum yang ditampilkan.
e) grid on, digunakan untuk menampilkan grid pada axes agar posisi
sinyal/spektrum diketahui berdasarkan sumbu x dan sumbu y.
4) Tombol Reset All, digunakan untuk mereset semua masukan dan keluaran dari program yang sudah dijalankan.
4.1. Tampilan Program
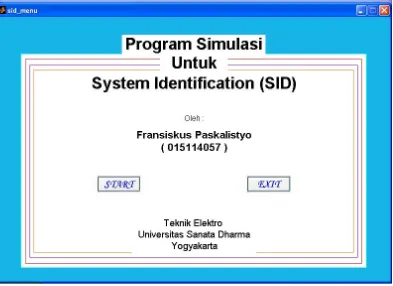
Saat pertama kali menjalankan program simulasi, user akan melihat
tampilan halaman pembuka program. Gambar 4.1 menunjukkan tampilan halaman
pembuka program.
Pada halaman pembuka terdapat dua tombol yang dapat digunakan oleh
user, yaitu tombol START dan tombol EXIT. Tombol START digunakan untuk
masuk ke program utama, sedangkan tombol EXIT digunakan untuk keluar dari
program. Tampilan halaman utama program ditunjukkan pada Gambar 4.2. Pada
halaman utama program terdapat menu File dan menu Help. Menu File terdiri dari
tiga submenu, yaitu Open, Save dan Exit. Submenu Open digunakan untuk
mengambil input file *.wav dari komputer yang digunakan, submenu Save
digunakan untuk menyimpan hasil simulasi program, sedangkan submenu Exit
digunakan untuk keluar program simulasi. Gambar 4.3 menunjukkan tampilan
submenu-submenu yang terdapat pada menu File.
Menu Help juga terdiri dari tiga submenu, yaitu SID help, SID Program
help dan About SID. Submenu SID help berisi keterangan singkat mengenai
system identification, submenu SID Program help berisi keterangan tentang cara
menjalankan program simulasi, sedangkan submenu About SID berisi keterangan
tentang orang yang membuat program. Gambar 4.4 menunjukkan tampilan
submenu-submenu yang terdapat pada menu Help.
b
(b) (a)
(c)
Gam ar 4.3. Tampilan submenu File. (a) Open. (b) Save. (c) Kotak dialog jika akan keluar program.
Gambar 4.4. Tampilan submenu Help. (a) SID Help. (b) SID Program help.
Untuk dapat menjalankan program simulasi, dibutuhkan masukan yang
sesuai. Pada panel input, user harus mengambil file *.wav yang terdapat dalam
komputer yang sedang digunakan, kemudian menampilkan sinyal input dengan
cara menekan tombol Signal. User dapat mengubah banyaknya jumlah data input
sesuai dengan keinginan user, dengan cara menekan tombol change, kemudian
menampilkan rentang data tercuplik.
Gambar 4.5 memperlihatkan kotak dialog untuk diisi user jika user
menekan tombol change. User dapat menentukan rentang data tercuplik sesuai
keinginan, tidak perlu menggunakan seluruh jumlah data input dari file *.wav
yang dipilih, melainkan hanya mengambil beberapa sampel saja. Kotak Data awal
adalah data tercuplik ketika program mulai mengevaluasi, sedangkan Data akhir
adalah data tercuplik ketika program mengakhiri evaluasi. Dari beberapa