Diajukan untuk memenuhi Salah Satu Syarat Memperoleh Gelar Sarjana Sains
Program Studi Matematika
Disusun oleh:
Nama : Andreana Ika Nurinasari NIM : 02 3114 017
PROGRAM STUDI MATEMATIKA JURUSAN MATEMATIKA FAKULTAS SAINS DAN TEKNOLOGI
UNIVERSITAS SANATA DHARMA YOGYAKARTA
Presented as Partial Fulfillment to Obtain the Sarjana Sains Degree
in Mathematics Study Program
By
Name : Andreana Ika Nurinasari Student Number: 02 3114 017
MATHEMATICS STUDY PROGRAM
SCIENCE AND TECHNOLOGY FACULTY SANATA DHARMA UNIVERSITY
DIA membuat segala sesuatu indah pada waktunya….
Skripsi ini ku persembahkan untuk : Yesus Kristus dan Bunda Maria yang senantiasa menyertaiku. Albertus Galih suami, teman, sahabat dan segala – galanya,
terimakasih untuk cinta, perhatian dan segala dukungan moral maupun spiritualnya,
disusun untuk memenuhi salah satu syarat memperoleh gelar Sarjana Sains di Program Studi Matematika Jurusan Matematika Fakultas Sains dan Teknologi Universitas Sanata Dharma Yogyakarta.
Dalam penyusunan skripsi ini penulis mendapatkan bantuan dari berbagai pihak. Oleh karena itu dalam kesempatan ini perkenankanlah penulis menghaturkan terima kasih yang sebesar – besarnya kepada pihak yang telah memberikan bantuan ini, antara lain:
1. Romo Dr. Frans Susilo, SJ selaku dosen pembimbing yang telah dengan sabar membimbing dan mendampingi penulis sehingga penulis dapat menyelesaikan skripsi ini dengan baik. Terima kasih Romo……
2. Bapak Y. G. Hartono, S.Si, M.Sc selaku Kepala Program Studi Matematika. 3. Ibu Lusia Krismiyati Budiasih, S.Si, M.Si, terimakasih atas masukan –
masukannya.
4. Bapak Ir. Ig. Aris Dwiatmoko, M.Sc selaku dosen pembimbing akademik atas segala bimbingan dan perhatian yang diberikan kepada penulis.
5. Romo Ir. Gregorius Heliarko S.J., S.S., B.S.T., M.A., M.Sc selaku Dekan Fakultas Sains dan Teknologi.
6. Segenap Bapak dan Ibu Dosen Program Studi Matematika atas segala ilmu, bimbingan, perhatian yang penulis dapatkan selama menimba ilmu di bangku kuliah ini.
7. Segenap karyawan Universitas Sanata Dharma khususnya perpustakaan Paingan atas segala pelayanan yang telah diberikan
berikan.
11.Saudara - saudara sepupuku Dek Dian, Dek Nana, dll termakasih atas segala dukungan yang telah diberikan.
12.Teman – teman seperjuanganku di Matematika 2002: Priska (thanks buat semuanya ya…), Retno (ayo Ret, kamu pasti bisa..), Lili, Vida, Lia, Ijup, Aan, Galih, Bani, Markus, Taim, Lenta, Debby, Felix, Tato, Archy, Ika, Cia, Aning, Dani, Rita, Nunung, Asih, Desy, Wuri, Deon, Palma terimakasih atas kebersamaannya selama ini. Dan juga kakak – kakak dan adik – adik atas segala bantuannya.
13.Berbagai pihak yang tidak dapat penulis sebutkan satu persatu, terima kasih atas segala bantuannya.
Walaupun telah diusahakan sebaik mungkin namun dalam penulisan ini skripsi ini tentu masih banyak kekurangan, kekeliruan dan masih jauh dari sempurna. Oleh karena itu penulis mengharapkan saran dan kritik yang bersifat membangun demi kemajuan yang akan dating.
Semoga skripsi ini dapat memberikan tambahan wawasan dan pengetahuan bagi pembaca.
Yogyakarta, ………... 2007
HALAMAN PENGESAHAN……….. iii
HALAMAN PERSEMBAHAN………... iv
HALAMAN MOTTO……….. v
HALAMAN PERNYATAAN KEASLIAN KARYA……….. vi
HALAMAN ABSTARK……….. vii
HALAMAN ABSTRACK……… viii
KATA PENGANTAR……….. ix
DAFTAR ISI………. xi
BAB I PENDAHULUAN……… 1
A. Latar Belakang Masalah………. 1
B. Perumusan Masalah……… 4
C. Pembatasan Masalah………... 4
D. Tujuan Penulisan………. 4
E. Manfaat Penulisan………... 4
F. Metode Penulisan………. 5
G. Sistematika Penulisan………... 5
BAB II TEORI HIMPUNAN KABUR……….……… 7
A. Himpunan Kabur……….………. 7
B. Operasi pada Himpunan Kabur………... 11
C. Relasi Kabur………. 16
D. Proposisi Kabur……… 17
BAB III TEORI POSIBILITAS……… 20
A. Pendekatan Intuitif Posibilitas……….. 20
B. Pendekatan Aksiomatis Posibilitas………22
PENUTUP……… 65 A. Kesimpulan……… 65
Tabel 3.2.2.3 Badan Evidensi Marginal………. 39 Tabel 3.2.2.4 Hubungan antara pemetaan dasar, ukuran kepercayaan, dan ukuran
Gambar 2.1.2.2 Grafik fungsi keanggotaan himpunan kabur A∩B………… 14
Gambar 2.1.2.3 Grafik fungsi keanggotaan himpunan kabur A~∪B~………… 15
Gambar 3.2.3.1a Barisan lengkap himpunan-himpunan bagian tersarang dari X.... 50
Gambar 3.2.3.1b Ukuran posibilitas yang didefinisikan pada X……… 50
Gambar 3.2.3.2 Badan evidensi tersarang marginal……… 57
Gambar 3.2.3.3 Badan evidensi tersarang bersama……… 58
Gambar 3.2.3.4 Distribusi posibilitas marginal……… 59
BAB I PENDAHULUAN
A. Latar Belakang Masalah
Teori himpunan kabur pertama kali diperkenalkan oleh Prof. L.A. Zadeh
pada tahun 1965. Teori ini berlandaskan pada himpunan kabur yang dipakai untuk
menyelesaikan suatu permasalahan optimasi yang memuat kekaburan dalam
perumusannya. Teori himpunan kabur merupakan perluasan dari teori himpunan
klasik atau tegas. Himpunan tegas A didefinisikan dengan menggunakan suatu
fungsi χA yang nilainya dalam {0,1}. Fungsi keanggotaan dari himpunan A
didefinisikan sebagai berikut :
⎩
Keunggulan dari teori himpunan kabur adalah kemampuannya
memodelkan secara lebih mendekati kenyataan. Sebab dari permasalahan yang
terjadi dalam kehidupan nyata diubah ke dalam bahasa matematis supaya
mempermudah penyelesaiannya dan kemudian penyelesaian tersebut
dikembalikan ke dalam permasalahan nyata. Salah satu cara pemodelannya adalah
penentuan fungsi keanggotaan himpunan kabur dimana setiap anggota
mempunyai derajat keanggotaan. Fungsi keanggotaan dari suatu himpunan kabur
à dalam semesta X adalah pemetaan A ~
μ dari X ke selang tertutup [0,1], yaitu :
Teori himpunan kabur adalah alat yang dapat digunakan untuk
memodelkan suatu permasalahan dalam proses ukuran untuk memperoleh
penyelesaian yang sesuai dengan realita.
Dalam kehidupan, kita sering berjumpa dengan gejala kekaburan. Ambil
suatu contoh. Dalam suatu kelas seorang guru menyuruh para siswanya yang
mempunyai sepeda untuk mengangkat tangannya. Maka dalam seketika kelas itu
terbagi menjadi dua kelompok (himpunan) secara tegas, yaitu kelompok para
siswa yang mengangkat tangannya (mempunyai sepeda) dan kelompok para siswa
yang tidak mengangkat tangannya (tidak mempunyai sepeda). Lain halnya dengan
contoh tentang suatu bentuk percobaan kejahatan yang belum tentu kesalahan dari
tersangka. Himpunan orang-orang yang bersalah dalam kejahatan dan himpunan
orang-orang yang tidak bersalah, dianggap mempunyai batasan-batasan yang
sangat jelas. Di dalam contoh kedua ini, yang diperhatikan bukan derajat dimana
tersangka bersalah melainkan derajat dimana bukti-bukti menunjukkan
keanggotaan tersangka di dalam himpunan orang-orang yang bersalah maupun
dalam himpunan orang-orang yang tidak bersalah. Bersalah di sini mengandung
unsur ketidaktegasan karena bersalah menurut pandangan orang yang satu dengan
yang lain bisa berbeda. Bukti-bukti yang sempurna akan menunjukkan pada
keanggotaan penuh di dalam suatu himpunan dan hanya satu dari himpunan ini.
Tetapi, bukti yang sempurna jarang ditemukan.
Untuk melihat jenis ketidakpastian akan ditunjuk suatu nilai pada suatu
himpunan. Nilai ini menunjukkan derajat bukti atau kepastian dari keanggotaan
sudah kita kenal, suatu angka ditunjukkan pada masing-masing elemen dari
himpunan universal, yang berarti derajat keanggotaannya dalam suatu himpunan
khusus dengan batas-batas yang tidak jelas (kabur). Sebaliknya, ukuran kabur
menunjuk suatu nilai dalam interval [0,1] pada masing-masing himpunan tegas
dari himpunan universal yang berarti derajat kepercayaan atau kepastian dari
suatu elemen khusus x yang ada dalam himpunan itu.
Ketidakpastian adalah fokus utama dari teori posibilitas. Konsep pokok
dari teori posibilitas adalah distribusi posibilitas. Guna mendefinisikan distribusi
probabilitas lebih dahulu kita akan mengenal pembatasan kabur. Ambil x adalah
suatu variabel linguistik dan à adalah suatu himpunan kabur yang dikaitkan
dengan nilai linguistik A. Maka proposisi kabur x adalah A dapat diinterpretasikan
sebagai pembatasan kabur pada x dan pembatasan ini dikarakteristikan dengan
fungsi keanggotaan ~(x) A
μ . Dengan kata lain, kita dapat menginterpretasikan
) ( ~ x A
μ sebagai derajat posibilitas dengan x = u. Sebagai contah, misalkan x adalah
umur seseorang dan à adalah himpunan kabur muda. Orang itu adalah muda (x
adalah A) maka μA(30) dapat diinterpretasikan sebagai derajat posibilitas bahwa
umur orang itu adalah 30.
Dari masalah ukuran tersebut, kita dapat membuat model matematika
yang sesuai dengan permasalahan yang melibatkan unsur-unsur tidak tegas di
dalamnya, kemudian mencari solusi atau penyelesaian dari model matematika
B. Rumusan Masalah
Berdasarkan latar belakang di atas, pokok-pokok permasalahan yang akan dibahas dalam penulisan ini adalah sebagai berikut :
Bagaimana membuat model yang cocok untuk masalah ukuran posibilitas yang
erat hubungannya dengan teori himpunan kabur?
C. Batasan Masalah
Dalam penulisan ini, penulis membatasi suatu metode atau cara dalam teori himpunan kabur yang berkaitan masalah ukuran kabur yaitu dengan teori
posibilitas. Dalam penulisan ini, penulis tidak akan membahas teori probabalitas.
D. Tujuan Penulisan
Tujuan penulisan yang akan dicapai dalam penulisan ini adalah :
1. Merumuskan model matematika yang sesuai dengan pengukuran kabur
yang melibatkan unsur-unsur yang tidak tegas.
2. Merumuskan penyelesaian ukuran kabur.
3. Menerapkan model matematika yang telah dibuat dalam satu masalah
kongret di lingkungan kabur
E. Manfaat Penulisan
Tulisan ini diharapkan dapat berguna untuk menambah wawasan tentang matematika, terutama tentang posibilitas kabur suatu teori yang erat hubungannya
F. Metode Penulisan
Metode yang digunakan dalam penulisan ini adalah studi pustaka yaitu dengan mempelajari beberapa materi yang berkaitan dengan pemakaian teori
himpunan kabur dalam ukuran kabur.
G. Sistematika Penulisan
BAB I PENDAHULUAN
Bab ini berisi tentang latar belakang penulisan tentang masalah ukuran
posibilitas. Tentang bagaimana masalah ketidakpastian yang merupakan fokus
utama dari teori posibilitas. Selain itu, terdapat tujuan penulisan, metode penulisan
dan manfaat penulisan bagi penulis. Selanjutnya diberikan pula sistematika
penulisan dalam masalah ukuran posibilitas ini.
BAB II TEORI HIMPUNAN KABUR
Bab ini berisi landasan teori dalam penulisan ini, yaitu teori himpunan
kabur. Kemudian disinggung pula tentang operasi pada himpunan kabur dan relasi
kabur.
BAB III TEORI POSIBILITAS
Bab ini berisi tentang teori posibilitas baik melalui pendekatan intuitif
maupun secara aksiomatis. Selain itu dibahas juga teori ukuran kabur dan teori
BAB V PENUTUP
Bab ini berisi tentang kesimpulan dari penulisan tentang masalah ukuran
BAB II
TEORI HIMPUNAN KABUR
A. Himpunan Kabur
Secara intuitif himpunan adalah suatu kumpulan atau koleksi
obyek-obyek (konkret maupun abstrak) yang mempunyai kesamaan sifat tertentu. Suatu
himpunan haruslah terdefinisi secara tegas, dalam arti bahwa untuk setiap obyek
selalu dapat ditentukan secara tegas apakah obyek tersebut merupakan anggota
himpunan itu atau tidak. Dengan perkataan lain, untuk setiap himpunan terdapat
batas yang tegas antara obyek-obyek yang merupakan anggota himpunan dan
obyek-obyek yang tidak merupakan anggota dari himpunan tersebut. Oleh
karenanya himpunan semacam itu seringkali juga disebut himpunan tegas.
Himpunan tegas dapat dinyatakan dengan menggunakan fungsi karakteristik, yaitu
suatu fungsi dari semesta X ke himpunan {0,1}. Suatu himpunan A dalam semesta
X dapat dinyatakan dengan fungsi karakteristik χA: X→ {0,l}.
fungsi keanggotaan dari himpunan kaburA~, dan nilainya menyatakan derajat
keanggotaan unsur-unsur di dalam himpunan kaburA~. Derajat keanggotaan sama
dengan 1, yaitu A ~
μ (x) = 1 untuk suatu x∈X, menyatakan keanggotaan penuh
dengan 0, yaitu μA~(x) = 0 untuk suatu x∈X , menyatakan bahwa unsur x tersebut
sama sekali bukan anggota himpunan kabur A~.
Definisi 2.1.1
Himpunan kabur A~ dalam X dapat dinyatakan sebagai pasangan terurut
{
x x x X}
A~= ( ,μA~( )) ∈ ,
di mana μA~ adalah fungsi keanggotaan dari himpunan kabur A~.
Bila semesta X kontinu, maka himpunan kabur A~ dapat dinyatakan dengan
∫ =
∈X
x A
x x A~ μ~( )/
di mana lambang
∫
di sini bukan merupakan lambang operator integral,melainkan melambangkan keseluruhan x∈X bersama dengan derajat
keanggo-taannya di dalam himpunan kabur A~ . Jika semesta X adalah himpunan yang
diskret, maka himpunan kabur A~ dapat dinyatakan dengan
∑ =
∈X
x A
x x
A~ μ~( )/
di mana lambang ∑ di sini bukan merupakan lambang operator jumlah,
melainkan melambangkan keseluruhan x∈X bersama dengan derajat
Contoh 2.1.1
Dalam semesta X = {1,2,3,4,5,6,7}, A~ adalah himpunan "bilangan bulat yang
dekat dengan empat". Maka himpunan kabur tersebut dapat dituliskan sebagai
berikut:
∑ =
∈X
x A
x x
A~ μ~( )/
= 0,06/1 + 0,10/2 + 0,50/3 + 1/4 + 0,50/5 + 0,10/6 + 0,06/7.
Definisi 2.1.2
Pendukung dari suatu himpunan kabur A~, yang dilambangkan dengan Pend(A~),
adalah himpunan tegas yang memuat semua unsur dari semesta yang mempunyai
derajat keanggotaan taknol dalam A~ , yaitu
Pend(A)= {x∈X ~(x)>0}
A
μ .
Definisi 2.1.3
Tinggi (height) dari suatu himpunan kaburA~, yang dilambangkan dengan
Tinggi(A~), didefinisikan sebagai
Tinggi(A~) = sup
{
~(x)}
A X xμ ∈
.
Definisi 2.1.4
Titik silang dari suatu himpunan kabur A~ adalah elemen dari semesta yang
Definisi 2.1.5
Teras (core) dari suatu himpunan kabur A~, yang dilambangkan dengan
Teras(A~), adalah himpunan semua unsur dari semestanya yang mempunyai
derajat keanggotaan sama dengan 1, yaitu
Teras(A~) =
{
x∈X ~(x)=1}
Aμ .
Definisi 2.1.6
Pusat dari suatu himpunan kabur didefinisikan sebagai berikut : Jika nilai purata
dari semua titik dimana fungsi keanggotaan himpunan kabur itu mencapai nilai
maksimum adalah berhingga, maka pusat himpunan kabur itu adalah nilai purata
tersebut. Jika nilai purata itu takhingga positif (negatif), maka pusat himpunan
ka-bur itu adalah yang terkecil (terbesar) di antara semua titik yang mencapai nilai
fungsi keanggotaan maksimum.
Contoh 2.1.2
Untuk himpunan kabur A~ dalam Contoh 2.1.1.1 di atas :
Pend(A~) = {1,2,3,4,5,6,7}
Tinggi(A~) = 1
Titik silang dari A~ adalah 3 dan 5
Teras(A~) = {4}
Definisi 2.1.7
Dua buah himpunan kabur A~ dan B~ dalam semesta X dikatakan sama, dengan
lambang A~ = B~, bila dan hanya bila
) ( )
( ~
~ x x
B
A μ
μ =
untuk setiapx∈X .
Definisi 2.1.8
Himpunan kabur A~ dan B~disebut himpunan bagian dari himpunan kabur B~,
dengan lambang A~⊆ B~, bila dan hanya bila
) ( )
( ~
~ x x
B
A μ
μ ≤
untuk setiapx∈X .
Contoh 2.1.3
Dalam semesta X = {l,2,3,4,5,6,7}
A~ = 0,06/1 + 0,10/2 + 0,50/3 + 1/4 + 0,50/5 + 0,10/6 + 0,06/7 dan
B~ = 0,10/2 + 0,4/3 + 1/4 + 0,5/5 + 0,1/6
Maka B~⊆ A~.
B. Operasi pada Himpunan Kabur
A' =
{
x∈X x∈A}
.Kalau himpunan tegas A adalah himpunan semua bilangan positif dalam
semesta himpunan semua bilangan bulat, maka A' adalah himpunan semua
bilangan bulat negatif atau nol.
Gabungan dua buah himpunan tegas A dan himpunan tegas B, dengan
notasi A∪B, adalah himpunan semua elemen dalam semesta yang merupakan
anggota himpunan A atau anggota himpunan B, yaitu
A∪B =
{
x x∈A∨x∈B}
.Irisan dua buah himpunan tegas A dan himpunan tegas B, dengan notasi
A∩B, adalah himpunan semua elemen semesta yang merupakan anggota
him-punan A dan sekaligus anggota himpunan B, yaitu
A∩B =
{
x x∈A∧x∈B}
.Karena fungsi keanggotaan suatu himpunan kabur adalah perampatan
dari fungsi karakteristik himpunan tegas, maka operasi-operasi pada himpunan
kabur dapat kita definisikan sesuai dengan operasi-operasi pada himpunan tegas.
Misalkan A~ dan B~adalah himpunan kabur dalam semesta X.
Definisi 2.2.1
Komplemen dari suatu himpunan kabur A~ adalah himpunan kabur A' dengan
fungsi keanggotaan
) ( 1 )
( ~
~ x x
A
A μ
μ ′ = −
Definisi 2.2.2
Diketahui dua buah himpunan kabur A dan B dengan fungsi keanggotaan sebagai
Maka grafik fungsi keanggotaan himpunan kabur A′~ adalah sebagai berikut
2 1
0 3 4 5 6
1
A ~
X A~′
Gambar 2.2.1. Grafik fungsi fungsi keanggotaan himpunan kabur A′~
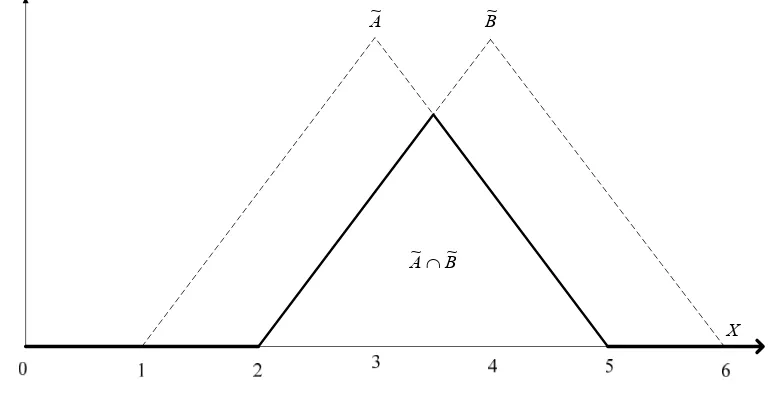
Grafik fungsi keanggotaan himpunan kabur A~∩B~ adalah sebagai berikut:
B~ A ~∩
A~ B~
X
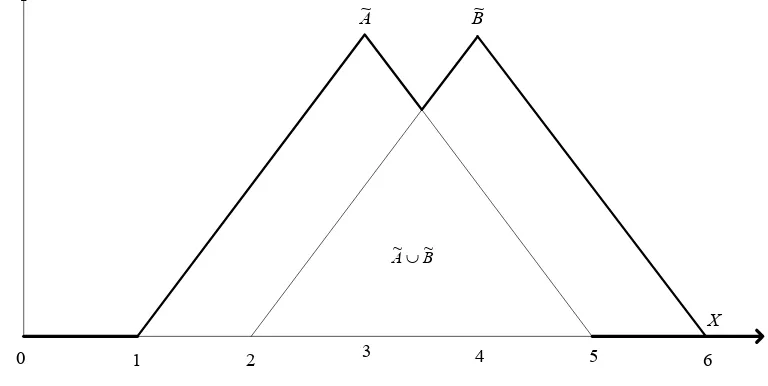
Grafik fungsi keanggotaan himpunan kabur A~∪B~ adalah sebagai berikut:
2 1
0 3 4 5 6
1
B A~∪~
A~ B~
X
Gambar 2.2.3. Grafik fungsi keanggotaan himpunan kabur A~∪B~
Contoh 2.2.2
Dalam semesta X ={ 1,2,3,4,5,6,7}
A~ = 0,6/1 + 0,1/2 + 0,5/3 + 1/4 + 0,5/5 + 0,1/6 + 0,6/7
B~ = 0,2/2 + 0,5/3 + 0,7/4 + 0,5/5.
Maka
A~ ' = 0,4/1 + 0,9/2 + 0,5/3 + 0,5/5 + 0,9/6 + 0,4/4
B~' = 1/1 + 0,8/2 + 0,5/3 + 0,3/4 + 0,5/5 + 1/6 + 1/7
A~ ∪ B~ = 0,6/1 + 0,2/2 + 0,5/3 + 1/4 + 0,5/5 + 0,1/6 + 0,6/7
C. Relasi Kabur
Definisi 2.3.1
Relasi kabur (biner) R~ antara elemen-elemen di himpunan X dan elemen-elemen
di himpunan Y adalah suatu himpunan bagian kabur dari darab Cartesius X × Y,
yaitu himpunan kabur :
R~=
{
(x,y), ~(x,y) (x,y) X Y)}
R ∈ ×
μ .
Dengan melihat definsi relasi kabur di atas, dapat disimpulkan bahwa
sebuah himpunan kabur A~ dalam semesta X dengan fungsi keanggotaan μA~dapat
dipandang sebagai sebuah relasi kabur uner.
Contoh 2.3.1
Misalkan X = {40, 87, 314} dan Y = {10, 36, 228}, kemudian didefinisikan relasi
kabur R~, yaitu relasi "jauh lebih besar" antara elemen-elemen X dan Y. Maka
relasi tersebut dapat ditulis sebagai berikut: R~ = 0,3 / (40,10) + 0,1 / (40,36) +
0,5 / (87,10) + 0,3 / (87,36) + 0,9 / (314,10)+ 0,7 / (314,36) + 0,4 / (314,228).
Atau dengan matriks relasi sebagai berikut:
Definisi 2.3.2
Bila R~ adalah suatu relasi kabur pada semesta X × Y, maka invers dari R~, yang
dinyatakan dengan R~-1, adalah relasi kabur pada semesta Y × X dengan fungsi
keanggotaan
) , ( ) ,
( ~
~1 y x R x y
R μ
μ − =
untuk setiap (y,x) ∈ Y × X.
Matriks dari invers relasi kabur R~, yaitu R~-1, adalah transpose dari matriks dari
relasi R~.
D. Proposisi Kabur
Proposisi kabur adalah kalimat yang memuat predikat kabur, yaitu
predikat yang dapat direpresentasikan dengan suatu himpunan kabur. Proposisi
kabur yang mempunyai nilai kebenaran tertentu disebut pernyataan kabur. Nilai
kebenaran dari suatu pemyataaan kabur disajikan dengan suatu bilangan real
dalam selang [0,1]. Nilai kebenaran itu disebut juga derajat kebenaran dari
pernyataan kabur itu. Bentuk umum dari proposisi kabur adalah
x adalah A
di mana x adalah suatu variabel linguistik dan predikat A adalah suatu nilai
linguistik dari x. Misalkan proposisi kabur "x adalah A" dilambangkan dengan
p(x), dan derajat kebenaran dari p(x0) dengan τ(p(x0)), maka
p
(
Contoh 2.4.1
Dalam proposisi kabur
Badan anak itu gemuk
Predikat "gemuk" dapat dikaitkan dengan himpunan kabur S~ dengan fungsi
keanggotaan S~
μ . Derajat kebenaran dari pernyataan kabur
Badan anak yang beratnya 90 kg itu adalah gemuk
sama dengan dereajat keanggotaan 90 kg dalam himpunan kabur " gemuk",
misalnya S~
μ (90) = 0,8.
Predikat "benar" adalah suatu predikat kabur yang dapat dinyatakan
dengan suatu himpunan kabur B~, dengan derajat keanggotaan bilangan real dalam
semesta [0,1], sedangkan predikat "salah" adalah S~ = B~'.
Definisi 2.4.1
Fungsi keanggotaan himpunan kabur B~ tersebut didefinisikan sebagai fungsi
identitas, yaitu
x x
B~( )=
μ
untuk setiap x∈[0,1], di mana x adalah derajat kebenaran suatu pernyataan kabur.
Definisi 2.4.2
Fungsi keanggotaan himpunan kabur S~ =B~' adalah
μS~(x) = k(μ
untuk setiap x∈ [0,1], di mana k adalah suatu komplemen kabur.
Contoh 2.4.2
Dalam contoh 2.1.4.1 pernyataan kabur
Badan anak yang beratnya 90 kg itu adalah gemuk
mempunyai derajat kebenaran 0,8. Maka pernyataan kabur
"Badan anak yang beratnya 90 kg itu adalah gemuk" adalah benar
mempunyai derajat kebenaran ~(80)=0,8 B
BAB III
TEORI POSIBILITAS
A. Pendekatan Intuitif Posibilitas
Tidak lama setelah Zadeh memperkenalkan teori himpunan kabur pada
akhir tahun enam puluhan, ia mengembangkan konsep posibilitas secara intuitif
melalui penelitiannya yang dipublikasikan dalam artikel yang berjudul "Fuzzy
Sets as a Basic for a Theory of Possibility" pada tahun 1978. Sesuai judul
karangannya itu, Zadeh membangun teori posibilitas atas dasar teori himpunan
kabur. Teori posibilitas adalah teori yang melengkapi teori probabilitas dalam
menangani masalah - masalah yang berhubungan dengan ketidakpastian. Misalkan
x adalah suatu variabel dalam semesta U dan A~ adalah himpunan kabur dalam U
dengan fungsi keanggotaan A~
μ , di mana ~(x) A
μ menyatakan derajat keanggotaan
elemen x ∈ U dalam himpunan kabur A. Maka predikat kabur A dalam proposisi
"x adalah A " dapat diinterpretasikan sebagai suatu pembatasan kabur pada
variabel x.
Definisi 3.1.1
Diberikan himpunan kabur A~ dalam U dan proposisi "x adalah A", maka
distribusi posibilitas yang berkaitan dengan x, yang dinyatakan dengan notasi πx,
secara numerik didefinisikan sama dengan fungsi keanggotaan A~ , yaitu
untuk setiap x ∈ U.
Contoh 3.1.1
Himpunan kabur "bilangan bulat kecil" didefinisikan sebagai
A~ = 1/1 + 1/2 + 0.8/3 + 0.6/4 + 0.4/5 + 0.2/6.
Maka distribusi posibilitas yang berkaitan dengan x jika diketahui bahwa "x
adalah bilangan bulat kecil” secara numerik adalah
πx = 1/1 + 1/2 + 0.8/3 + 0.6/4 + 0.4/5 + 0.2/6.
Posibilitas bahwa x adalah 3, jika diberikan "x adalah bilangan bulat kecil”,
adalah 0.8, yaitu πx (3) = μA~(3) = 0.8.
Definisi 3.1.2
Jika C adalah himpunan tegas dalam semesta U dan πx adalah distribusi posibilitas
yang berkaitan dengan x, maka ukuran posibilitas dari C, yang dinotasikan dengan
Posx(C), yang menyatakan posibilitas bahwa "x adalah anggota C" didefinisikan
sebagai berikut
Posx(C) = supmin x( )
U u
u π
∈ .
Definisi 3.1.3
Jika A~ adalah suatu himpunan kabur dalam U, dan πx adalah distribusi posibilitas
yang berkaitan dengan x, maka ukuran posibilitas dari A~, dengan notasi Posx(A
~ ),
Posx(A
~
) = supmin{ ~(u), x(u)} A
U u
π μ
∈ .
Contoh 3.1.2
Lihat contoh 3.1.1
πx = 1/1 + 1/2 + 0.8/3 + 0.6/4 + 0.4/5 + 0.2/6
dan himpunan tegas C = {3,4,5}. Maka ukuran posibilitas (C) adalah
Posx(C) = supmin x( ) }
5 , 4 , 3 {
u
u
π ∈
= max [0.8, 0.6, 0.4]
= 0.8.
B. Pendekatan Aksiomatis Posibilitas
Selanjutnya akan dibahas teori posibilitas yang dibangun dengan
pendekatan aksiomatis dalam kerangka teori yang lebih luas yaitu ukuran kabur.
Zadeh mengakui bahwa pendekatan intuitif yang dipakainya dalam
mengembangkan teori posibilitas itu tidak sepenuhnya dapat diandalkan. la
menyarankan diadakannya penelitian lanjutan untuk mengembangkan pendekatan
aksiomatis yang akan meletakkan teori posibilitas itu di atas dasar matematis yang
lebih kokoh. Pendekatan terakhir ini menempatkan teori posibilitas dalam
1. Ukuran kabur
Definisi 3.2.1.1
Andaikan X adalah suatu himpunan semesta pembicaraan dan P(X) adalah
keluarga semua himpunan bagian dari X. Suatu ukuran kabur adalah suatu fungsi
g : P(X) → [0,1] yang memenuhi syarat-syarat berikut:
1. g (φ) = 0 dan g (X) = 1 (syarat batas)
2. Untuk setiap A,B ∈ P(X), bila A ⊆B, maka g (A) ≤g (B) (sifat monoton)
Untuk himpunan semesta takhingga ditambahkan syarat :
3. Bila A1 ⊂ A2 ⊂... adalah barisan naik himpunan - himpunan dalam P(X),
tian berdasarkan keterbatasan informasi yang tersedia bahwa suatu elemen
tertentu dari X adalah anggota himpunan A tersebut. Dalam hal ini informasi yang
tersedia tidak memungkinkan untuk memperoleh kepastian sepenuhnya mengenai
keanggotaan elemen tersebut dalam himpunan A. Sebagai contoh, misalnya kita
kita akan mencoba untuk menentukan apakah pasien ini termasuk himpunan
orang-orang penderita pneumonia, bronchitis, emphysema, atau penyakit panas
biasa. Pemeriksaan fisik dapat membantu seorang dokter untuk mendiagnosa
pen-yakit namun ini kurang meyakinkan. Sebagai contoh, kita menetapkan nilai yang
tinggi yaitu 0,75 untuk bronchitis dan nilai yang lebih rendah untuk kemungkinan
yang lain, seperti 0,45 untuk pneumonia dan emphysema dan 0 untuk penyakit
panas biasa. Di sini kita berhadapan dengan jenis ketidakpastisan yang secara
fundamental berbeda dengan ketidakpastian yang muncul sebagai akibat kaburnya
suatu istilah (predikat) yang kita pakai untuk membicarakan sesuatu.
Syarat batas menyatakan bahwa elemen yang sedang kita bicarakan pasti
tidak merupakan anggota himpunan kosong dan pasti merupakan anggota dari
semesta pembicaraan.
Sifat monoton menyatakan bahwa derajat kepastian bahwa elemen
tertentu merupakan anggota suatu himpunan haruslah paling sedikit sebesar
derajat kepastian elemen tersebut merupakan anggota dari sebarang himpunan
bagian dari himpunan itu. Dengan perkataan lain, kalau kita mengetahui dengan
derajat kepastian tertentu bahwa suatu elemen merupakan anggota suatu
himpunan, maka derajat kepastian bahwa elemen itu merupakan anggota
himpunan yang memuat himpunan tersebut haruslah lebih besar atau sama (dan
tidak lebih kecil) daripada derajat kepastian yang kita ketahui itu.
Syarat kontinyuitas, yang hanya dapat diberlakukan untuk himpunan
semesta yang takhingga, menyatakan bahwa pemetaan g haruslah suatu pemetaan
Pemetaan yang hanya memenuhi (1), (2), dan (3) atau (1), (2), dan (4)
saja disebut ukuran kabur semikontinyu. Kalau memenuhi (3) disebut kontinyu
dari bawah, dan kalau memenuhi (4) disebut kontinyu dari atas. Ukuran kabur
seperti didefinisikan di atas jelas merupakan generalisasi dari ukuran probabilitas,
bahkan generalisasi dari konsep ukuran. Generalisasi itu pada dasarnya
dilaksanakan dengan mengganti syarat aditif tercacah pada ukuran dengan syarat
yang lebih lemah, yaitu monoton dan kontinyu, atau paling tidak semikontinyu.
Karena (A∩B)⊆A dan (A∩B)⊆B untuk setiap dua himpunan A dan B,
maka dengan sifat monoton ukuran kabur akan kita peroleh
g (A∩B) ≤g (A) dan g (A∩B) ≤g (B)
sehingga g (A∩B) ≤ min {g(A), g(B)}
untuk setiap ukuran kabur g dan setiap dua himpunan A dan B dalam P(X).
Demikian pula karena A⊆ (A∪ B)dan B ⊆ (A∪ B), maka akan kita peroleh
g (A∪B) ≥ max {g(A), g(B)}
untuk setiap ukuran kabur g dan setiap dua himpunan A dan B dalam P(X).
Salah satu cabang khusus dari teori ukuran kabur adalah teori evidensi
yang akan dibahas berikut ini.
2. Teori Evidensi
Definisi 3.2.2.1
Andaikan P(X) adalah keluarga semua himpunan bagian dari X. Suatu
ukuran kepercayaan adalah suatu pemetaan
k : P(X) → [0,1]
yang memenuhi syarat-syarat berikut ini :
1. k(φ) = 0 dan k(X) = 1
sifat monoton dari ukuran kabur.
Jika A∈P(X) dan Ac = X−A, maka
1 = k(X) = k(A∪Ac) ≥k(A) + k(Ac) −k(A∩Ac) = k(A) + k(Ac).
Definisi 3.2.2.2
Hubungan antara ukuran kepercayaan dan ukuran plausibilitas adalah
p(A) = 1−k(Ac)
untuk setiap himpunan bagian A dalam semesta X, sehingga
k(A) = k((Ac)c)
Bila A dan B adalah himpunan bagian dari X, dengan A∈B, maka Bc∈Ac,
sehingga p(A) = 1−k(Ac) < 1−k(Bc) = p(B), yang memperlihatkan bahwa ukuran
plausibilitas juga memenuhi sifat monoton dari ukuran kabur.
Pemetaan di atas disebut pemetaan dasar probabilitas. Untuk setiap himpunan
A∈P(X), bilangan m(A) menyatakan derajat evidensi yang mendukung
keanggotaan suatu elemen tertentu dari X dalam himpunan A berdasarkan semua
informasi yang tersedia. Nilai m(A) tersebut hanya berlaku untuk himpunan A
saja, dan tidak untuk himpunan-himpunan bagian manapun dari A. Karena untuk
pemetaan dasar tersebut
1. Tidak disyaratkan bahwa m(X) = 1
2. Tidak disyaratkan bahwa jika A⊆B maka m(A) ≤ m(B)
3. Tidak disyaratkan ada hubungan antara m(A) dan m(Ac),
maka jelas bahwa m bukan suatu ukuran kabur.
Ukuran kepercayaan dan ukuran plausibilitas dapat didefinisikan secara unik
de-ngan menggunakan pemetaan dasar, yaitu sebagai berikut:
untuk setiap A∈ P(X).
Sebaliknya, ukuran kepercayaan k dapat dipakai untuk mendefinisikan pemetaan
dasar m, yaitu
m(A) = ∑ −
⊆ −
A B B
B A
B k( ) 1
untuk setiap A∈ P(X).
Hubungan antara m(A) dan k(A) yang dinyatakan pada (i) di atas
mempunyai arti sebagai berikut: m(A) menyatakan derajat evidensi bahwa suatu
elemen adalah anggota himpunan A, sedangkan k(A) mewakili keseluruhan
evidensi bahwa elemen itu adalah anggota himpunan A. Ukuran plausibilitas p(A),
seperti dinyatakan pada (ii), mempunyai arti yang berlainan, yaitu bahwa ukuran
plausibilitas tidak hanya mewakili total evidensi bahwa elemen itu adalah anggota
himpunan A atau himpunan bagian dari A, tetapi juga evidensi atau kepercayaan
tambahan yang dikaitkan dengan himpunan-himpunan yang beririsan dengan
himpunan A. Maka
p(A) ≥k(A)
untuk semua A ∈ P(X).
Himpunan A∈P(X) dengan m(A) > 0 disebut elemen fokus dari m, dalam
arti evidensi yang tersedia terfokus pada himpunan bagian dari X yang demikian
itu. Bila ℱ adalah himpunan elemen-elemen fokus dari m maka pasangan (ℱ,m)
Jika kita mengetahui bahwa elemen tertentu berada dalam suatu
himpunan semesta X, namun tidak tahu sama sekali elemen itu berada dalam
himpunan bagian mana dari X, maka kasus ini disebut dengan ketidaktahuan total,
yang dapat dinyatakan dengan
1. Pemetaan dasar:
berbeda dinyatakan dengan dua pemetaan dasar m1 dan m2 dan dapat
dikombinasikan untuk memperoleh pemetaan dasar gabungan m1.2. Evidensi dapat
dikombinasikan dalam berbagai macam cara, dengan mempertimbangkan
keandalan sumber-sumbernya dan aspek-aspek lainnya yang relevan. Cara baku
untuk mengombinasikan dua pemetaan dasar adalah
( )
( ) ( )
Aturan ini disebut aturan kombinasi Dempster. Menurut aturan ini, derajat
derajat evidensi m2(C) dari sumber kedua yang berfokus pada himpunan C∈P(X)
dikombinasikan dengan menggunakan perkalian m1(B).m2(C), yang berfokus
pada himpunan B∩C . Tetapi karena mungkin ada irisan-irisan elemen fokus dari
sumber pertama dan sumber kedua yang sama-sama menghasilkan himpunan A,
maka kita harus menjumlahkan perkalian-perkaliannya untuk memperoleh
2 . 1
m (A). Irisan tersebut mungkin pula merupakan himpunan kosong. Karena kita
menyaratkan m1.2(φ) = 0, maka K dalam rumus di atas tidak dimasukkan dalam
definisi m1.2. Jumlahan semua perkalian m1(B).m2(C) untuk semua
elemen-elemen fokus B dari m1dan elemen-elemen fokus C dari m2 sedemikian sehingga
B∩C ≠ φ sama dengan 1−K. Untuk menormalkan pemetaan dasar m1.2 kita
membagi jumlahan tersebut dengan 1−K.
Contoh 3.2.2.1
Misalkan sebuah lukisan kuno ditemukan, yang sangat mirip dengan lukisan
Leo-nardo da Vinci. Penemuan seperti itu biasanya menimbulkan berbagai pertanyaan,
yang berhubungan dengan status lukisan itu, misalnya :
1. Apakah lukisan yang ditemukan itu adalah lukisan asli hasil karya Leonardo
da Vinci ?
2. Apakah lukisan yang ditemukan itu adalah hasil karya salah seorang murid
Leonardo da Vinci?
Misalkan semesta X adalah himpunan semua lukisan, dan L, M, dan P adalah
himpunan bagian dari X, yang berturut-turut memuat semua lukisan Leonardo da
Vinci, semua lukisan murid Leonardo da Vinci, dan semua lukisan palsu.
Misal-nya ada dua orang ahli yang memeriksa dengan saksama lukisan itu dan kemudian
memberikan nilai m1 dan m2 (lihat Tabel 3.2.2.1).
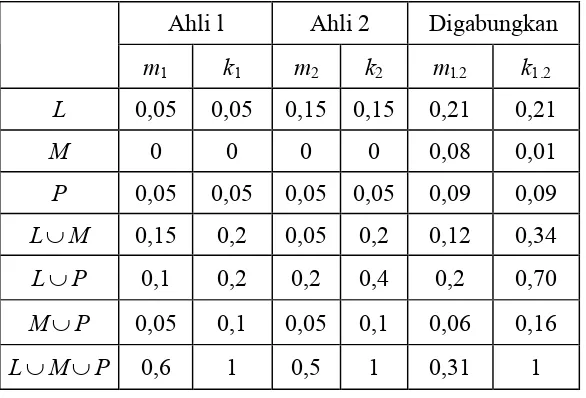
Tabel 3.2.2.1.Kombinasi tingkat evidensi dari dua sumber yang berbeda
Ahli l Ahli 2 Digabungkan
m1 k1 m2 k2 ml.2 k1.2
L 0,05 0,05 0,15 0,15 0,21 0,21
M 0 0 0 0 0,08 0,01
P 0,05 0,05 0,05 0,05 0,09 0,09
L∪M 0,15 0,2 0,05 0,2 0,12 0,34
L∪P 0,1 0,2 0,2 0,4 0,2 0,70
M∪P 0,05 0,1 0,05 0,1 0,06 0,16
L∪M∪P 0,6 1 0,5 1 0,31 1
Ini adalah tingkat evidensi yang diberikan oleh masing-masing ahli dalam
penyelidikan itu dan yang mendukung dugaan bahwa lukisan itu termasuk dalam
salah satu himpunan. Misalnya: m1(L∪M) = 0.15 adalah tingkat evidensi yang
diperoleh dari ahli pertama bahwa lukisan itu dikerjakan oleh Leonardo da Vinci
menghitung evidensi total, k1 dan k2, untuk masing-masing himpunan, seperti
ditunjukkan dalam Tabel 3.2.2.1.
Dengan menggunakan Aturan Dempster untuk m1 dan m2, kita
mendapatkan m1.2 seperti yang terlihat dalan Tabel 3.2.2.1. Untuk menentukan
nilai m1.2, pertama kita menghitung faktor penormal 1−K.
K = m1.(L) m2.(M) + m1.(L) m2.(C) + m1.(L).m2(M∪P) + m1(M).m2(L) +
m1(M).m2(P) + m1(M).m2(L∪P) + m1(P).m2(L) + m1(P).m2(M )+
m1(P).m2(L∪M) + m1(L∪M).m2(P) + m1(L∪P) + m1.m2(M) +
m1(M∪P).m2(L)
= 0,05.0 + 0,05.0,05 + 0,05.0,05 + 0.0,15 + 0.0,05 + 0.0,2 + 0,05.0,15 +
0,05.0 + 0,05.0,05 + 0,15.0,05 + 0,0.0 +0,05.0,15
= 0 + 0,0025 + 0,0025 + 0 + 0 + 0 + 0,0075 + 0 + 0,0025 + 0,0075 + 0 +
0,0075
= 0,03.
Maka didapat faktor penormal 1−K = 1 0,03 = 0,97. Nilai dari − m1.2 dapat
dihitung.
Sebagai contoh,
m1.2 (L) = [m1 (L).m2(L) + m1.(L). m2 (L∪M) + m1.(L).m2(L∪P) +
m1(L).m2(L∪M∪P) + m1(L∪M).m2(L) + m1(L∪M).m2(L∪P)
+m1(L∪P).m2(L) +m1(L∪P).m2(L∪D)+ m1(L∪M∪P).m2(L)]
/0,97
= [0,05.0,15 + 0,05.0,05 + 0,05.0,2 + 0,05.0,5 + 0,15.0,15 +
= [0,0075 + 0,0025 + 0,01 + 0,025 + 0,0225 + 0,03 +0,01 + 0,01
+ 0,09] / 0,97
= 0,2075 / 0,97
= 0,21
m1.2(M) = [m1(M).m2(M + m1(M).m2(L∪M) + m1(M).m2(M∪P) +
m1(M).m2(L∪M∪P)+m1(L∪M).m2(M)+m1(L∪M).m2(M∪P)+
m1(M∪P).m2(M)+m1(M∪P).m2(L∪M)+m1(L∪M∪P).m2(M)]
/ 0,97
= [0.0 + 0.0,05 + 0.0,05 + 0.0,0 + 0,15.0 + 0,15.0,05 + 0,05.0 +
0,05.0,05 + 0,6.0] / 0,97
= [0 + 0 + 0 + 0 + 0 + 0,075 + 0 + 0,0025 + 0] / 0,97
= 0,00775 / 0,97
= 0,08
m1.2(L∪P) = [m1(L∪P).m2(L∪P) + m1(L∪P).m2(L∪M∪P) +
m1(L∪M∪P).m2(L∪P)] / 0,97
= [0,1.0,2 + 0,1.0,5 + 0,6.0,2] / 0,97
= [0,02 + 0,05 + 0,12] / 0,97
= 0,19 / 0,97
= 0,2
= 0,3 / 0,97
= 0,31
k1.2(L∪P) = [ k1 (L∪P).k2(L∪P) + k1(L∪P).k2(L∪M∪P) +
k1(L∪M∪P).k2(L∪P)] / 0,97
= [0,2.0,4 + 0,2.1+ 1.0,4]/0,97
= [0,08 + 0,2 + 0,4] / 0,97
= 0,68 / 0,97
= 0,70
k1.2(L∪M∪P) = [ k1 (L∪M∪P).k2(L∪M∪P)] / 0,97
= [1.1] / 0,97
= 1 / 0,97
= 1.
Sekarang misalkan pemetaan dasar m didefinisikan pada darab Cartesius
Z = X
×
Ym : P(X × Y) → [0,1].
Setiap elemen fokus dari m adalah relasi biner R pada X ×Y. Jika RX adalah
proyeksi R pada X, maka
(i) RX = {x∈X (∃y∈Y)(x,y)∈R} ⊆X
dan jika RY adalah proyeksi R pada Y, maka
Kita dapat mendefinisikan proyeksi mX dari pemetaan dasar m pada X, yaitu
mX(A) = ∑
=RX
A R
R
m( ) untuk setiap A ∈P(X)
dan proyeksi m pada Y, yaitu
mY(B) = ∑
=RY
B R
R
m( ) untuk setiap B∈ P(Y).
Untuk menghitung mX(A), kita menjumlahkan semua nilai m(R) untuk
elemen fokus R yang proyeksinya pada X adalah A. Fungsi mX dan mY adalah
pemetaan dasar khusus, sedangkan (ℱx, mX) dan (ℱy, mY) adalah badan evidensi
marginal.
Definisi 3.2.2.3
Dua badan evidensi marginal (ℱx, mX) dan (ℱy, mY) dikatakan noninteraktif
jika dan hanya jika untuk semua A∈ ℱx dan semua B∈ ℱy
m (A
×
B) = mX(A).mY(B)dan
m(R) = 0 untuk semua R≠A
×
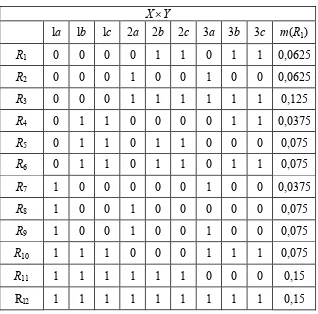
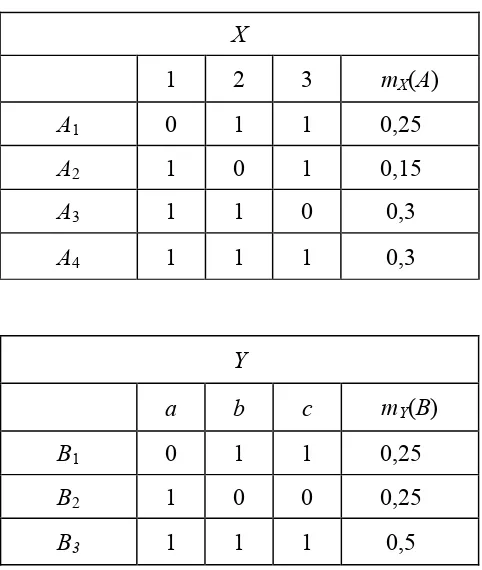
B.Contoh 3.2.2.2
Diberikan badan evidensi dalam Tabel 3.2.2.2 dengan elemen fokus adalah
him-punan bagian dari darab Cartesisus X
×
Y, di mana X = {1, 2, 3} dan Y ={a, b, c}.Dengan menggunakan rumus di atas, kita memperoleh badan evidensi marginal
seperti terlihat pada Tabel 3.2.2.3. Sebagai contoh
mX(A1) = mX ({2,3}) = m(R1) + m(R2) + m(R3)
= 0,0625 + 0,0625+0,125
= 0,25
mX(A2) = mX({1,3}) = m(R4) + m(R7) + m(R10)
= 0,0375 + 0,0375 + 0,075
= 0,15
mX (A3) = mX ({2,3}) = m(R5) + m(R8) + m(R11)
= 0,075 + 0,075 + 0,15
= 0,3
mY (B2) = mY ({a}) = m(R2) + m(R7) + m(R8) + m(R9)
= 0,0625 + 0,0375 + 0,075 + 0,075
= 0,25
mY(B3) = mY ({a,b,c}) = m(R3) + m(R10) + m(R11) + m(R12)
= 0,125 + 0,075 + 0,15 + 0,15
Tabel 3.2.2.2 Badan evidensi
X×Y
la lb lc 2a 2b 2c 3a 3b 3c m(R1)
R1 0 0 0 0 1 1 0 1 1 0,0625
R2 0 0 0 1 0 0 1 0 0 0,0625
R3 0 0 0 1 1 1 1 1 1 0,125
R4 0 1 1 0 0 0 0 1 1 0,0375
R5 0 1 1 0 1 1 0 0 0 0,075
R6 0 1 1 0 1 1 0 1 1 0,075
R7 1 0 0 0 0 0 1 0 0 0,0375
R8 1 0 0 1 0 0 0 0 0 0,075
R9 1 0 0 1 0 0 1 0 0 0,075
R10 1 1 1 0 0 0 1 1 1 0,075
R11 1 1 1 1 1 1 0 0 0 0,15
Tabel 3.2.2.3 Badan Evidensi Marginal
X
1 2 3 mX(A)
A1 0 1 1 0,25
A2 1 0 1 0,15
A3 1 1 0 0,3
A4 1 1 1 0,3
Y
a b c mY(B)
B1 0 1 1 0,25
B2 1 0 0 0,25
B3 1 1 1 0,5
Akan kita lihat apakah badan evidensi marginal bersifat noninteraktif.
m(A1 ×B1) = m(R1)
= 0,0625
= 0,25 . 0,25
= mX(A1).mY(B1)
m(A1 × B2) = m(R2)
= 0,0625
= 0,25 . 0,25
= mX (A1).mY(B2)
Perhatikan bahwa A1 × B2 = {2,3} × {a} = {2a, 3a} = R2.
m(A1×B3) = m(R3)
= 0,125
= 0,25 . 0,5
= mX(A1) .mY(B3)
Perhatikan bahwa A1×B3= {2,3} × {a, b, c} = {2a, 2b, 2c, 3a, 3b, 3c } =R3.
m(A2 × B1) = m(R4)
= 0,0375
= 0,15.0,25
= mX(A2) .mY(B1)
Perhatikan bahwa A2 × B1 = {1,3} × {b, c} = {lb, 1c, 3b, 3c } = R4.
m(A3×B1) = m(R5)
= 0,075
= 0,3 . 0,25
= mX (A3).mY(B1)
m(A4× B1) = m(R6)
= 0,075
= 0,3 . 0,25
= mX(A4).mY(B1)
Perhatikan bahwa A4× B1 ={1,2,3}×{b,c} = {1b, 1c, 2b, 2c, 3b, 3c } = R6.
m(A2× B2) = m(R7)
= 0,0375
= 0,15.0,25
= mX(A3).mY(B2)
Perhatikan bahwa A2× B2 = {1,3} ×{ a} = {la, 3a } = R7.
m(A3 × B2) = m(R8)
= 0,075
= 0,3 . 0,25
= mX(A3).mY(B2)
Perhatikan bahwa A3 × B2 = {1,2} ×{ a) = {la, 2a } =R8.
m(A4×B2) = m(R9)
= 0,075
= 0,3 . 0,25
= mX(A4).mY(B2)
m(A2×B3) = m(R10)
= 0,075
= 0,15.0,5
= mX(A2).mY(B3)
Perhatikan bahwa A2×B3 ={1,3} × {a,b,c} = {la, 1b, 1c, 3a, 3b, 3c} = R10.
m(A3×B3) = m(R11)
= 0,15
= 0,3 . 0,5
= mX(A3).mY(B3)
Perhatikan bahwa A3×B3= {1,3} × {a,b,c} = {la, 1b, 1c, 3a, 3b, 3c} = R11.
m(A3 ×B3) = m(Rl2)
= 0,15
= 0,3 . 0,5
= mX(A4).mY(B3)
Perhatikan bahwa A3 ×B3 ={1,2,3} × {a,b,c}
= {la, 1b, 1c, 2a, 2b, 2c, 3a, 3b, 3c} = Rl2.
Jadi, badan evidensi khusus bersifat noninteraktif karena untuk semua A∈ ℱxdan
Tabel 3.2.2.4 Hubungan antara pemetaan dasar, ukuran kepercayaan,
Suatu cabang dari teori evidensi yang hanya menyangkut badan-badan
evidensi dengan elemen-elemen fokus yang tersarang (nested) dikenal dengan
nama teori posibilitas. Bagian khusus dari ukuran kepercayaan dan ukuran
plausibilitas dalam teori posibilitas adalah ukuran nesesitas dan ukuran
posibilitas.
Bila ℒ ={ A1,A2,...} adalah suatu keluarga himpunan-himpunan
sedemikian sehingga Ai ⊂ Ai+1 untuk setiap i = 1,2,..., maka ℒ disebut keluarga
himpunan-himpunan yang tersarang (nested). Sebelum membahas teori tersebut,
Teorema 3.2.3.1
Bila (ℱ, m) adalah suatu badan evidensi berhingga yang tersarang, maka ukuran
kepercayaan dan ukuran plausibilitas yang berkaitan dengannya mempunyai sifat
(i) k(A∩B) = min {k(A), k(B)}
dan b adalah bilangan positif terbesar i sedemikian sehingga Ai ⊆ B.
yang membuktikan bagian kedua dari teorema tersebut. ■
Definisi 3.2.3.1
Suatu ukuran kepercayaan nes yang berkaitan dengan badan evidensi
yang tersarang disebut ukuran nesesitas.
Berdasarkan Teorema 3.2.3.1 diperoleh
nes( I K
k k
A
∈ ) = infk∈K nes(Ak)
untuk setiap keluarga bagian {Akk∈K} dalam P(X), di mana K adalah suatu
himpunan indeks.
Definisi 3.2.3.2
Suatu ukuran plausibilitas pos yang berkaitan dengan badan evidensi
yang tersarang disebut ukuran posibilitas.
Berdasarkan Teorema 3.2.3.1 diperoleh
pos ( U K
k k
A
∈ ) = k∈K
sup pos(Ak)
untuk setiap keluarga bagian {Ak k∈K } dalam P(X), di mana K adalah suatu
himpunan indeks.
Karena ukuran nesesitas adalah ukuran kepercayaan yang khusus, dan
nes(A) + nes(Ac) ≤ 1
pos(A) + pos(Ac) ≥ l
nes(A) = 1 pos(− Ac)
pos(A) = 1−nes{Ac).
Teorema 3.2.3.2
Untuk setiap himpunan A ∈ P(X)
(i) Bila nes(A) > 0, maka pos(A) = 1
(ii) Bila pos(A) < 1, maka nes(A) = 0.
Bukti:
(i) Dari definisi ukuran nesesitas kita memperoleh
min{nes(A), nes(Ac)} = nes(A∩Ac) = 0.
Jadi jika nes(A) > 0, maka haruslah nes(Ac)=0, sehingga
pos(A) = 1 − nes(Ac) = 1.
(ii) Dari definisi ukuran posibilitas kita memperoleh
max{pos(A), pos(Ac)} = pos(A∪ Ac) = 1
Jadi jika pos(A) < 0, maka haruslah pos(Ac) = 1, sehingga
nes(A) = 1 − pos(Ac) = 0 . ■
Diberikan ukuran posibilitas pos pada P(X). Pemetaan r : X→ [0,1] yang
didefinisikan dengan r(x) = pos({x}) untuk setiap x ∈ X disebut fungsi distribusi
Teorema 3.2.3.3
Setiap ukuran posibilitas pos yang didefinisikan pada himpunan kuasa P(X) yang
berhingga dapat ditentukan secara tunggal oleh fungsi distribusi posibilitas r yang
berkaitan dengannya dengan aturan
max ) (
A x
A pos
∈ = r(x)
untuk setiap A ∈ P(X).
Bukti:
Kita buktikan dengan induksi matematis pada kardinalitas dari himpunan A.
Un-tuk A= 1, maka A = {x}, untuk suatu x ∈ X , sehingga pos (A) = pos ({x}) =
max A x∈
r(x). Selanjutnya andaikan aturan tersebut dipenuhi untuk A= n−1. Untuk
A = {x1,x2,…,xn} berlaku
pos(A) = pos({xl, x2,…, xn-1}∪{xn})
= max{pos({xl, x2,…, xn-1}),pos({xn})}
= max{max{r(x1), r(x2),…, r(xn-l)}, pos({xn})}
= max{max{pos({x1), pos({x2}),…, pos({xn-1}), pos({xn})}
= max {pos({x1), pos({x2}),…, pos{{xn-1}), pos({xn })}
= max{r(x1), r(x2),…,r(xn-1), r(xn)}
= max A x∈
{ r(x)}
Jika X tak berhingga, maka persamaan dalam Teorema 3.2.3.3 diubah menjadi
dengan fungsi r. Banyaknya komponen dalam suatu distribusi posibilitas disebut
panjang distribusi posibilitas itu..
Distribusi posibilitas dapat diurutkan sedemikian sehingga ri ≥rj jika
i< j. Misalkan adalah Rnhimpunan semua distribusi posibilitas dengan panjang
n, dan
Jika diberikan dua distribusi posibilitas,
1
dengan join∨ dan meet ∧ didefinisikan sebagai berikut
r
dan
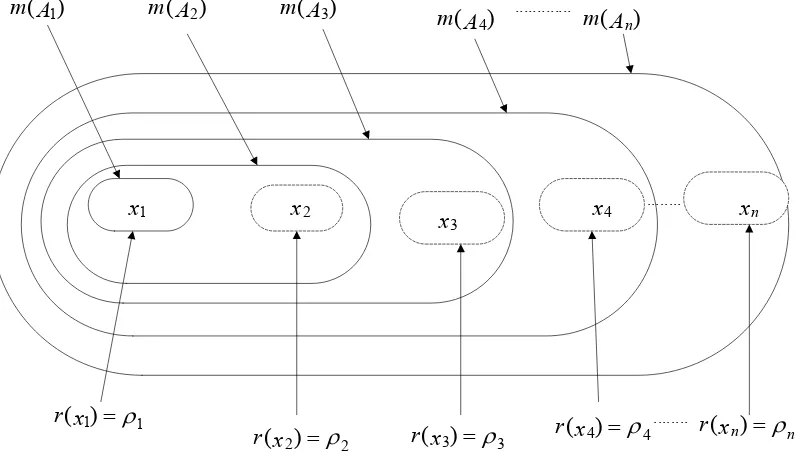
P(X) dengan pemetaan dasar m. Sesuai dengan definisi dari ukuran posibilitas,
semua elemen fokus adalah tersarang. Misalkan elemen-elemen fokus adalah
sebagian atau semua himpunan bagian dalam barisan lengkap
himpunan-himpunan bagian yang tersarang
x2
Gambar 3.2.3.1a Barisan lengkap himpunan-himpunan bagian tersarang dari X
x1 x2 x3 x4
Tidak disyaratkan bahwa m(Ai)≠0 untuk setiap i∈Νn, seperti contoh pada
Gambar 3.2.3.1b.
Sesuai pembicaraan m(Ai)≠0 sebelumnya, setiap ukuran posibilitas
pada himpunan semesta yang berhingga dapat dinyatakan dengan n-tuple
m = m1,m2,...,mn
himpunan semua distribusi dasar dengan panjang n, dan
M
satu distribusi posibilitas r∈R, begitu juga sebaliknya. Berdasarkan Teorema
3.2.3.3 dan definisi ukuran posibilitas sebagai ukuran plausibilitas khusus
diperoleh
dengan satu persamaan untuk setiap i∈Νn. Jika ditulis dengan lebih eksplisit
.
mendefinisikan suatu korespondensi satu-satu
M R
t: ↔
antara distribusi posibilitas dan distribusi dasar. Jika diberikan
r = r1,r2,...,rn dan m = m1,m2,...,mn ∈M
untuk suatu n∈N, maka t(r) = m jika dan hanya jika (iv) dipenuhi, dan t−1(m) =
r jika dan hanya jika (iii) dipenuhi.
Fungsi t tersebut memungkinkan kita untuk mendefinisikan urutan parsial
pada himpunan M berdasarkan urutan parsial pada himpunan R. Untuk semua
2
Perhatikan fungsi m pada Gambar 3.2.3.1b. Kita amati bahwa (i) dipenuhi, tetapi
barisanA1⊂ A2 ⊂...⊂ A7 dari himpunan-himpunan bagian yang tersarang.
Menerapkan persamaan (iii) pada distribusi dasar tersebut untuk semua i∈Ν7,
kita dapatkan distribusi posibilitas
2
seperti terlihat dalam Gambar 3.2.3.1b. Sebagai contoh
7
Derajat posibilitas pos(A) dapat dihitung untuk setiap himpunan bagian A dari X =
{x1,x2,..,x7} dari komponen-komponen distribusi posibilitas r dengan Teorema
3.2.3.3. Sebagai contoh,
Berdasarkan (ii) dan (iii) diperoleh bahwa r1 =1 untuk setiap distribusi posibilitas
r = r1,r2,...,rn ∈Rn
řn= 1,0,0,...,0
dengan n – 1 nol. Distribusi posibilitas ini dengan pemetaan dasar
t(řn) = 1,0,0,...,0,0
yang mempunyai bentuk yang sama, mempresentasikan evidensi sempurna
dengan tanpa ketidakpastian yang terlibat. Distribusi posibilitas terbesar
n
rˆ dengan panjang n terdiri dari 1 semua, dan
t(rˆ ) = n 0,0,...,0,1
dengan n – 1 nol. Distribusi ini menunjukkan ketidaktahuan total, yaitu suatu
keadaan di mana tidak ada evidensi yang relevan. Pada umumnya, semakin besar
distribusi posibilitas, evidensi semakin kurang spesifik dan akibatnya
ketidaktahuan menjadi lebih besar.
Sekarang kita bahas distribusi posibilitas bersama r yang didefinisikan
pada darab Cartesius X ×Y. Proyeksi rX dan rY dari r, yang disebut distribusi
posibilitas marginal, didefinisikan dengan formula
r (x) maxr(x,y)
Y y
X = ∈ (v)
untuk setiap x∈X dan
r (y) maxr(x,y)
X x
Y = ∈ (vi)
untuk setiap y∈Y.
Formula ini diturunkan langsung dari Teorema 3.2.3.3. Perhatikan bahwa untuk
himpunan {(x,y)y∈Y}, yaitu pasangan dalam X ×Y untuk mana distribusi
bersama didefinisikan. Maka
(vii)
di mana posX dan pos adalah ukuran posibilitas yang bersesuaian dengan rX
dan r. Menurut Teorema 3.2.3.3, ruas kiri persamaan (vii) adalah
)
Jadi diperoleh persamaan (v).
Definisi 3.2.3.4
Badan-badan evidensi tersarang pada X dan Y, yang direpresentasikan
oleh fungsi distribusi posibilitas rX dan rY, disebut noninteraktif jika dan hanya
jika
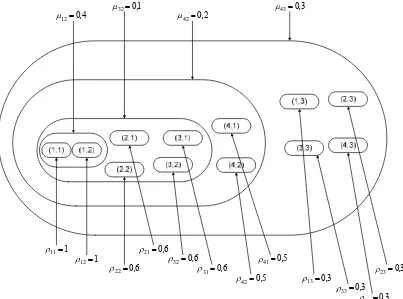
Suatu contoh badan evidensi tersarang noninteraktif diberikan dalam Gambar
3.2.3.2 dan 3.2.3.3. Dalam Gambar 3.2.3.3 terlihat bahwa
) , min( i j
ij r r
r = ′ ,
untuk setiap posibilitas bersama rij di mana ri,rj′ adalah posibilitas marginal yang
6
Definisi noninteraksi posibilistik ini (Definisi 3.2.3.4) tidak berdasarkan pada
aturan produk dari teori evidensi. Maka definisi itu tidak sesuai dengan definisi
umum dari badan evidensi noninteraktif (seperti pada Definisi 3.2.2.3). Aturan
produk tersebut tidak dapat digunakan untuk mendefinisikan noninteraksi
posibilistik karena aturan itu tidak mempertahankan struktur tersarang dari
elemen-elemen fokus. Hal ini dapat diilustrasikan dalam Contoh 3.2.3.2 di bawah
ini.
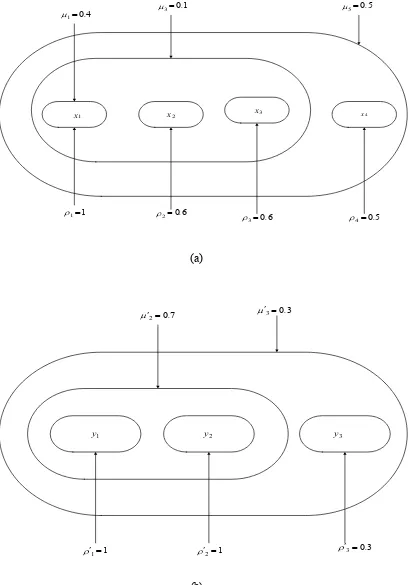
Contoh 3.2.3.2
Perhatikan distribusi posibilitas marginal dan distribusi dasar pada Gambar 3.2.3.2
yang mewakili dua badan evidensi tersarang. Jika kita mengombinasikannya
dengan Definisi 3.2.3.4, maka kita dapatkan distribusi posibilitas bersama, seperti
pada Gambar 3.2.3.5(a). Jadi hasil dari kombinasi dua badan evidensi yang
tersarang dengan operator min adalah tersarang lagi, sehingga kita tetap berada
dalam domain teori posibilitas. Sebaliknya, bila dipakai aturan produk, kita
memperoleh fungsi dasar bersama seperti pada Gambar 3.2.3.5(b). Fungsi dasar
ini tidak mewakili suatu badan evidensi tersarang, sehingga tidak berada dalam
domain teori posibilitas. Berdasarkan (v) dan (vi) diperoleh
x1 x2 x3 x4 4
0
1= .
μ μ3=0.1 μ5=0.5
1
1=
ρ ρ2=0.6
6 0
3= .
ρ ρ4=0.5
(a)
y1 y2 y3
7 0
2= .
′
μ μ′3=0.3
1
1=
′
ρ ρ′2=1 ρ′3=0.3
(b)
4
Gambar 3.2.3.3 Badan evidensi tersarang bersama
x1 x2
y1 y2
(b)
Gambar 3.2.3.4 Distribusi posibilitas marginal
y x1 1
y x2 1
y x1 2
y x2 2
Fungsi dasar bersama Distribusi posibilitas
bersama
y x1 1
y x1 2
y x2 1
y x2 2
(b)
Gambar 3.2.3.5 Fungsi dasar bersama
Ini berarti bahwa distribusi posibilitas bersama yang didefinisikan pada 3.2.3.4
adalah distribusi bersama terbesar yang memenuhi distribusi marginal yang
diberikan.
Misalkan rX dan rY adalah fungsi distribusi posibilitas marginal pada X
dan Y berturut-turut, dan r adalah fungsi distribusi posibilitas bersama pada X ×Y
yang didefinisikan dalam rX dan rY seperti pada Definisi 3.2.3.4.
Jika posX,posY dan pos adalah ukuran posibilitas yang bersesuaian dengan rX,
Y
)]
ukuran nesesitas yang berkaitan dengan ukuran posibilitas pos, posX ,posY
berturut-turut, dan A + B adalah kodarab Cartesius A×B. Persamaan ini diperoleh
dari
Selanjutnya kita akan membicarakan konsep fungsi distribusi posibilitas
kondisional, yang penting untuk mendefinisikan kebebasan posibilistik.
Definisi 3.2.3.5
Dua badan evidensi posibilistik marginal dikatakan bebas jika dan hanya jika
posibilitas kondisionalnya tidak berbeda dengan posibilitas marginalnya yang
bersesuaian. Hal tersebut dinyatakan dengan persamaan