BAB II
LANDASAN TEORI
2.1 Pengertian Pengontrolan
Sistem pengontrolan telah memegang peranan yang sangat penting dalam perkembangan ilmu dan teknologi. Disamping sangat diperlukan pada pesawat ruang angkasa, peluru kendali, sistem pengemudian pesawat, dan sebagainya, sistem pengontrolan telah menjadi bagian yang penting dan terpadu dalam proses-proses dalam pabrik dan industri. Misal pada proses-proses pengontrolan tekanan, suhu, kelembapan, viskositas, arus, dan aliran dalam industri proses.
Variabel yang dikontrol adalah besaran atau keadaan yang diukur dan dikontrol, dalam keadaan normal, variabel yang dikontrol adalah keluaran dari sistem, dan sistem adalah kombinasi dari beberapa komponen yang bekerja sama-sama dan melakukan sasaran tertentu. Sistem tidak dibatasi hanya pada sasaran fisik saja, konsep sistem dapat digunakan pada gejala yang abstak saja. Oleh karena istilah sistem kontrol dapat saja digunakan pada bidang ilmu lain.
Maka dapat disimpulkan sistem pengontrolan berarti mengukur nilai dari variabel sistem yang dikontrol dan menerapkan variabel yang dimanipulasi dalam sistem untuk mengoreksi atau membatasi penyimpangan nilai yang diukur dari nilai yang dikehendaki.
2.2 Karakteristik Pengontrolan
Karakteristik sistem pengontrolan dapat kita bagi dalam dua jenis sistem, yaitu :
1. Sistem Kontrol Loop Tertutup ( closed loop control system ) 2. Sistem Kontrol Loop Terbuka ( open loop control system )
2.2.1 Sistem Kontrol Loop Tertutup
Sistem kontrol umpan balik sering kali disebut sebagai sistem kontrol loop tertutup. Praktisnya, istilah kontrol umpan balik dan kontrol loop tertutup dapat saling dipertukarkan penggunaannya. Pada sistem kontrol loop tertutup, sinyal kesalahan yang bekerja, yaitu antara sinyal masukan dan sinyal umpan balik (yang mungkin sinyal keluarannya sendiri atau fungsi dari sinyal keluaran dan turunannya), disajikan ke kontroler sedemikian rupa untuk mengurangi kesalahan dan membawa keluaran sistem ke nilai yang dikehendaki. Istilah kontrol loop tertutup selalu berarti penggunaan aksi kontrol umpan balik untuk mengurangi kesalahan sistem. Dapat kita lihat pada gambar 2.1 dibawah ini.
P R O S E S
U M P A N B A LIK
O utput Input +
2.2.1 Sistem Kontrol Loop Terbuka
Suatu sistem yang keluarannya tidak mempunyai pengaruh terhadap aksi kontrol disebut sistem kontrol loop terbuka. Dengan kata lain, sistem kontrol loop terbuka keluarannya tidak dapat dipergunakan sebagai perbandingan umpan balik dengan masukan. Suatu contoh sederhana adalah mesin cuci. Perendaman, pencucian, dan pembilasan dalam mesin cuci dilakukan atas basis waktu. Mesin ini tidak mengatur sinyal keluaran yaitu tingkat kebersihan pakaian.
Dalam suatu sistem kontrol loop terbuka, keluaran tidak dapat dibandingkan dengan masukan acuan. Jadi, untuk tiap masukan acuan berhubungan dengan kondisi operasi tertentu; sebagai akibat, ketetapan dari sistem tergantung pada kalibrasi. Dengan adanya gangguan, sistem kontrol loop terbuka tidak dapat melaksanakan tugas seperti yang diharapkan. Sistem kontrol loop terbuka dapat digunakan, hanya jika hubungan antara masukan dan keluaran diketahui dan tidak terdapat gangguan internal maupun eksternal. Dapat kita lihat pada gambar 2.2 dibawah ini.
Proses
Input Output
Gambar 2.2 Diagram Blok Sistem Kontrol Rangkaian Terbuka
Masing - masing dari sistem kontrol baik itu loop terbuka maupun loop tertutup mempunyai kelebihan dan kelemahan, yaitu :
Kelebihan sistem kontrol loop tertutup adalah :
1. Tidak memerlukan kalibrasi ulang dari waktu ke waktu.
2. Dapat digunakan untuk komponen - komponen yang relatif kurang teliti dan murah untuk mendapatkan pengontrolan "plant" yang teliti.
3. Dapat digunakan pada sistem jika terdapat gangguan yang tidak dapat diramalkan pada komponen sistem.
Kelemahan sistem kontrol loop tertutp adalah :
1. Kestabilan selalu merupakan persoalan utama karena cenderung terjadi akibat kesalahan koreksi berlebih yang dapat menimbulkan osilasi pada amplitude konstan maupun berubah.
2. Harga lebih mahal dari pada sistem kontrol loop terbuka. Sedangkan kelebihan sistem kontrol loop terbuka adalah :
1. Konstruksinya sederhana dan perawatannya mudah. 2. Lebih murah dari pada sistem kontrol loop tertutup. 3. Tidak ada persoalan kestabilan.
Kelemahan sistem kontrol loop terbuka adalah :
1. Gangguan dan perubahan kalibrasi akan menimbulkan kesalahan, sehingga keluaran mungkin berbeda dengan yang diinginkan.
2. Untuk menjaga kualitas yang diperlukan pada keluaran diperlukan kalibrasi ulang dari waktu ke waktu.
2.3 Pengertian Alat Kontrol
Variabel yang dikontrol adalah besaran atau keadaan yang diukur dan dikontrol. Variabel yang dimanipulasi adalah besaran atau keadaan yang diubah oleh kontroller untuk mempengaruhi nilai variabel yang dikontrol. Dalam keadaan normal, variabel yang dikontrol adalah keluaran dari sistem. Kontrol berarti mengukur nilai dari variabel yang dikontrol dan menerapkan variabel yang dimanipulasi ke sistem untuk mengoreksi atau membatasi penyimpangan nilai yang diukur dari nilai yang dikehendaki.
Jadi kesimpulannya, alat kontrol adalah suatu alat yang sengaja diproses dan diprogram sesuai dengan keinginan dari pemakai. Sebagai contoh adalah sistem kontrol suhu ruangan, dengan suhu ruangan sebenarnya dan membandingkannya dengan suhu acuan ( Suhu yang dikehendaki ), termostat menjalankan alat pemanas atau pendingin, atau mematikannya sedemikian rupa, sehingga memastikan suhu ruangan tetap pada suhu yang nyaman tidak tergantung dari keadaan suhu di luar rungan.
2.4 Kontroller dan Kerangan Kontrol 2.4.1 Kontroller
Kontroller berfungsi untuk mengatur agar keadaan yang sedang berlangsung dari suatu proses dapat berlangsung sesuai dengan keadaan yang diinginkan dari proses itu. Pengontrolan dapat dilakukan dengan tangan manusia dan dapat dilakukan dengan alat pengatur otomatis.
Akan tetapi, sebelum kita masuk ke pokok pembicaraan, terlebih dahulu kita akan melihat beberapa istilah yang erat hubungannya dengan Kontroller.
1. Range
Batasan selalu terdiri dari dua nilai yaitu nilai terendah dan nilai tertinggi. Misalnya batasan sebuah Kontroller adalah 0 – 100.
Nilai 0 disebut nilai batasan terendah ( Lower Range Valve ).
Sedang nilai 100 disebut nilai batasan tertinggi ( Upper Range Valve ).
2. Span
Bila batasan kontroller dari 0 – 100 maka span dari kontroller itu adalah 0, Span yang dimulai dengan angka 0 disebut Eleveted Span, sedangkan yang dimulai dengan angka dibawah 0 ( minus ) disebut Supressed Span.
3. Reading
Reading adalah nilai yang sedang berlaku dalam proses, reading terdiri dari dua jenis yaitu :
- Correct Reading, yaitu nilai sebenarnya
- Instrument Reading, yaitu nilai yang ditunjukkan oleh alat ukur.
4. Sinyal Fisik
Sinyal pneumatik atau listrik yang digunakan pada kontroller yaitu : - . Untuk sinyal pneumatik 3 – 15 Psi atau 0,2 – 1 Kg/Cm2
- . Untuk Sinyal Elektrik 1 – 5 Volt 4 – 20 mA 5. Sinyal Skala
Sinyal indikasi yang diberikan Kontroller dalam bentuk persen. Umumnya 0 – 100 %.
6. Gangguan ( Disturbancies )
Perubahan yang terjadi pada operasi kontroller. Perubahan ini biasanya ditimbulkan oleh :
-. Perubahan Set Point -. Perubahan input -. Perubahan beban
Dan masih banyak istilah – istilah lain yang di pakai pada proses kontroller. Pada proses kontrol, kecematan terhadap alat penunjuk haruslah tetap diperhatikan.agar kita mendapatkan produk sesuai dengan yang kita inginkan.
2.4.2 Kerangan Kontrol
Kerangan kontrol mengatur catu materi atau energi untuk satu proses dengan mengatur suatu bukaan melalui mana materi itu mengalir. Jadi, kerangan kontrol adalah Orifice yang berubah-ubah, yang ditempatkan pada satu pipa proses.
Rumus untuk aliran melalui orifice adalah :
Q = C . A
PDimana :
Q = Besarnya aliran, cairan ( gpm ), gas ( scfh ), uap ( lb/h ) C = Konstanta ( tetepan ) untuk keadaan aliran
A = Luas penampang pipa
P = Tekanan yang melalui kerangan. ( Psi )
Besaran aliran melalui suatu kerangan adalah berbanding pada bidang bukaan dan jatuh melalui kerangan itu. Bidang bukaaan kerangan berubah – ubah
sesuai dengan persen langkah kerangan sedang tekanan jatuh melalui kerangan berubah – ubah sesuai dengan kondisi hilir kerangan itu. Kondisi hilir suatu kerangan ditentukan oleh proses yang bersangkutan, seperti keadaan pipa – pipa, bejana dan peralatan – peralatan lainnya dalam proses itu ditempatkan.
Kapasitas melalui sebuah kerangan kontrol dinyatakan dengan notasi Cv,
Cv adalah sejumlah laju aliran air dalam satuan gallon/menit yang dapat dialirkan
melalui kerangan ketika kerangan itu terbuka penuh dan terdapat pressure drop sebesar 1 psi pada keadaan suhu dan tekanan standart.
Untuk Cairan : Cv = Q P G Untuk Gas Cv = 1360 G ) (P2 P TfG Untuk uap : Cv = 3 , 63 Q P V Dimana :
Q = Laju aliran cairan ( gpm ), gas ( scfh ), uap ( lb/h ) G = Berat jenis ( Kg/cm3 )
P = Pressure drop dalam psi ( Psi )
P1 = Tekanan mutlak upstream kerangan ( Psi )
P2 = Tekanan mutlak downstream kerangan ( Psi )
V = Spesifikasi volume downstream ( feet/lb )
Kerangan kontrol pada umumnya terdiri dari dua bagian pokok, yaitu : 1. Penggerak ( Aktuator )
2. Perakit Badan Kerangan ( Valve Body )
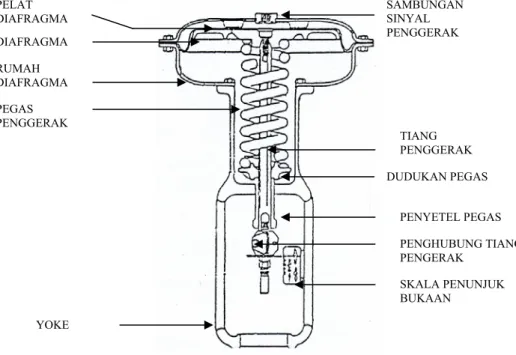
DIAFRAGMA PELAT DIAFRAGMA RUMAH DIAFRAGMA PEGAS PENGGERAK SAMBUNGAN SINYAL PENGGERAK TIANG PENGGERAK DUDUKAN PEGAS PENYETEL PEGAS PENGHUBUNG TIANG PENGERAK SKALA PENUNJUK BUKAAN YOKE
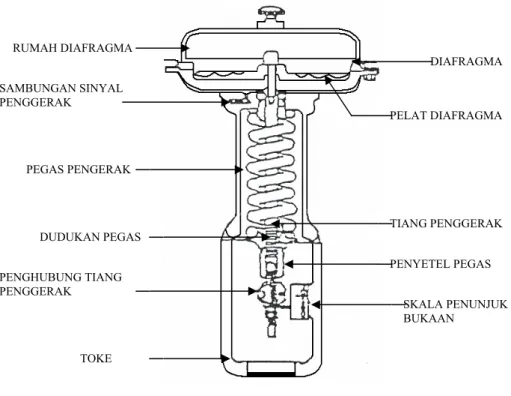
RUMAH DIAFRAGMA DIAFRAGMA SAMBUNGAN SINYAL PENGGERAK PELAT DIAFRAGMA PEGAS PENGERAK TIANG PENGGERAK DUDUKAN PEGAS PENYETEL PEGAS PENGHUBUNG TIANG PENGGERAK SKALA PENUNJUK BUKAAN TOKE
Gambar 2.4 Aksi Terbalik
Gambar 2.3 menunjukkan skematik alat penggerak aksi lurus sedangkan gambar 2.4 menunjukkan skematik aksi terbalik, penggerak ini diproduksi oleh perusahaan fisher dan termasuk penggerak pneumatik.
Bagian –bagian penting dari penggerak ini adalah : 1. Sambungan sinyal penggerak
2. Rumah difragma 3. Diafragma 4. Plat diafragma 5. Pegas penggerak 6. Dudukan pegas 7. Penyetel pegas
8. penghubung tiang penggerak 9. Yoke
Sinyal pneumatik dari kontroler atau alat bantu kontroler atau positioner masuk rumah diafragma melalui sambungan sinyal penggerak, sinyal ini ditumpukkan pada diafragma yang ditompang dengan plat diafragma, gaya yang dihasilkan sinyal ( diafragma ) kemudian dilawan oleh pegas penggerak. Pegas ini mempunyai nilai penekanan awal tertentu yang kemudian dapat diatur melalui penyetel pegas, jadi letak kedudukan penggerak adalah hasil keseimbangan kedua gaya itu.
Sedangkan gaya – gaya itu adalah tergantung pada luas bidang diafragma pegas seperti ini dapat digunakan pada kerangan – kerangan globe, Saunder, Butterfly, dan kerangan Ball.
Sewaktu tekanan sinyal pneumatik hilang, pegas penggerak akan mengembalikan ke posisi sebelum tekanan pneumatik atau listrik masuk ke rumah diafragma, sifat ini sangat baik untuk sistem keselamatan pada proses dimana pegas itu memungkinkan aksi udara untuk menutup ( Air To Close ), dan udara untuk membuka ( Air To Open ) pada kerangan yang bersangkutan.
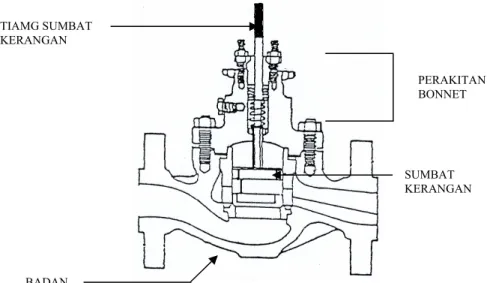
TIAMG SUMBAT KERANGAN PERAKITAN BONNET SUMBAT KERANGAN BADAN
Gambar 2.5 menunjukkan skematik perakitan badan kerangan, Perakitan badan kerangan terdiri dari bagian – bagian pokok sebagai berikut :
1. Tiang Sumbat Kerangan 2. Sumbat Kerangan 3. Perakitan Bonnet 4. Badan
2.5 Transmitter
Dalam dunia industri, biasanya digunakan dua jenis transmitter, yang kedua – duanya digunakan untuk mengetahui skala pengontrolan yang biasanya dipasang atau digunakan pada control valve.
Jenis transmitternya adalah : 1. Transmitter Pneumatik 2. Transmitter Elektrik
2.5.1 Transmitter Pneumatik
Pada dasarnya Transmitter pneumatik berfungsi untuk mengubah sinyal proses menjadi sinyal pneumatik. Serta mengirimkan sinyal pneumatik itu ke alat penerima seperti pencatat, pengatur, dan penunjuk.
Transmitter pneumatik pada umumnya terdiri dari dua bagian yaitu : -. Bagian perasa
-. Bagian pengirim
Karena pneumatik proses yang umum ada empat macam yaitu Pressure,
dari keempat variabel ini sering disebut Pressure Transmitter ( PT ), Level Transmitter ( LT ), Temperatur Transmitter ( TT ), dan Flow Transmitter ( FT ).
A. Bagian Perasa ( Detektor )
Bagian perasa berfungsi untuk mengubah sinyal proses kedalam bentuk gerak – gerak mekanik. Misalnya, suhu dari minyak sebelumnya adalah 1000C, beberapa detik kemudian menjadi 1100C, maka perubahan 100C ini merupakan sinyal yang harus diubah oleh bagian perasa ( detektor ) kedalam bentuk pergerakan mekanik.
Detektor yang sering digunakan pada sistem transmisi pneumatik adalah :
-. Meterbodi ( Meterbody ) -. Sel Beda Tekanan -. Penggeser ( Displacer )
-. Bola Berisi Cairan ( Liquid filled Buld )
a. Meterbodi
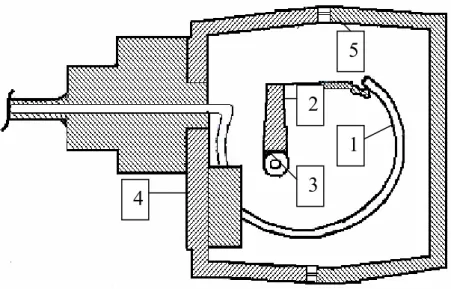
Pada meterbodi menunjukkan penampang dari meterbodi yang dipergunakan untuk mendeteksi tekanan. Meterbodi seperti ini disebut Remote
Seal Diaphram Bourdoun Tube Meterbody. Meterbodi jenis ini dapat kita lihat
pada gambar 2.6 di bawah ini.
5
4
6
8
1
2
3
7
Gambar 2.6 MeterbodiRemote Seal Diaphram terdiri dari bagian-bagian sebagai berikut : 1. Plensa Penghubung (Process Connecting Flange)
2. Diafragma Penyekat (Seal Diaphram) 3. Pipa Kapiler (Capility Tube)
4. Elemen Perasa (Sensing Element) 5. Lengan Pemuntir (Torque arm) 6. Batang Pemuntir (Torque Rod) 7. badan (Body)
8. Penutup (Cover)
Prinsip kerja dari Remote Seal Diaphram Meterbody adalah sebagai berikut : - Pipa Kapiler, bagian dalam diafragma Penyekat Tabung Bourdoun diisi
dengan cairan kental.
- Perubahan tekanan proses mengakibatkan diafragma penyekat bergerak mundur-maju. Ini mengakibatkan tekanan cairan kental berubah.
- Berubahnya tekanan cairan kental pada elemen perasa (sensing Element) mengakibatkan Tabung Bourdon itu bergerak-gerak mengembang atau menyusut.
- Pergerakan Lengan Pemuntir kemudian diterima oleh Batang Pemuntir dan diteruskan ke Bagian Pengirim dari Transmitter Tekanan (Pressure Transmitter)
- Dengan kalibrasi yang sempurna maka pergerakan dari Batang Pemuntir dapat dibuat sebanding dengan perubahan tekanan proses.
Meterbodi dan jenis diafragma Penyekat bila tidak dilengkapi dengan Pipa Kapiler, Diafragma penyekat dan cairan kental disebut sebagai : Meterbody Tabung Bourdon.
1
5
3
2
4
Gambar 2.7 Meterbody tabung Bourdon Keterangan Gambar : 1. Perasa 2. Lengan Pemuntir 3. Batang Pemuntir 4. Badan 5. Penutup
Gambar 2.7 menunjukkan penampang dari Bourdon Tube Meterbody.
Meterbodi ini sebenarnya sama dengan Remote Seal Diaphram Meterbody tanpa diafragma penyekat dan Pipa Kapiler.
Berbeda dengan Seal Diaphram Meterbody dimana gas atau cairan proses tidak langsung berhubungan dengan Element Perasa maka pada Meterbodi Tabung Bourdon dari gambar 2.7 materi proses adalah berhubungan dengan Elemen Perasa, karena itu Meterbodi seperti ini tidak cocok dipergunakan untuk uap, gas-gas korosif dan cairan-cairan berat.
Untuk uap, gas-gas korosif dan cairan-cairan berat biasanya dipergunakan Seal
Diaphram Meterbody. Seal Diaphram Meterbody dapat kita lihat pada gambar 2.8
di bawah ini.
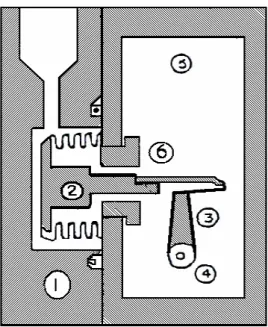
Gambar 2.8 Menunjukkan penampang meterbodi jenis lain yang disebut : Meterbodi penghembus
Keterangan gambar :
1. Penutup 2. Elemen Perasa 3. Lengan Pemuntir
4. Batang Pemuntir 5. Badan
6. Pembatas Langkah
Perbedaan antara Penghembus dan Meterbodi tabung Bourdon adalah terletak pada elemen Perasanya dimana Meterbodi Tabung Bourdon memakai tabung Bourdon sedangkan Meterbodi penghembus memakai penghembus sebagai Elemen Perasa.
Sama halnya dengan Meterbodi Tabung Bourdon, Meterbodi penghembus juga dapat dimodifikasi sehingga menjadi Remote Seal Diaphram Bellow Meterbody dengan menambahkan diafragma penyekat, pipa cairan ini umumnya sama seperti yang dipergunakan pada Termometer Isi Cairan (Liquid Filled Thermometer).
Prinsip kerja dari Meterbodi penghembus juga sama seperti Meterbodi Tabung Bourdon dimana perubahan tekanan proses menghasilkan gerak mundur-maju pada penghembus.
Kemudian gerak mundur-maju dirobah menjadi gerak setengah melingkar pada Batang pemutir melalui Lengan Pemulir.
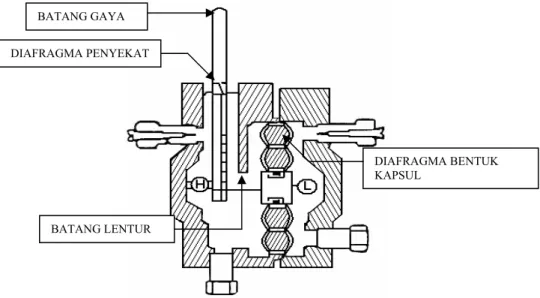
b. Sel Beda Tekanan ( Diffrential Pressure Cell )
Sel beda tekanan dapat dipergunakan untuk pressure transmitter, level transmitter, dan flow transmitter.Elemen perasa dari detektor sel beda tekanan dapat berupa diafragma dan penghembus. Sel beda tekanan dapat kita lihat pada gambar 2.9 di bawah ini.
BATANG GAYA DIAFRAGMA PENYEKAT
DIAFRAGMA BENTUK KAPSUL
BATANG LENTUR
Gambar 2.9 Sel Beda Tekanan jenis Diafragma
Detektor ini tidak mempunyai batang pemuntir dengan gerak memuntir, melainkan hanya mempunyai batang lentur yaitu batang penghubung yang menghubungkan dengan difragma dengan batang gaya.
c. Penggeser ( Displacer )
Penggeser dapat dipergunakan sebagai detektor pada level transmitter. Perubahan tinggi permukaan cairan akan menghasilkan pergerakan pada penggeser ( Elemen Perasa ).
Selanjutnya pergerakan dari penggeser diteruskan melalui batang pemuntir yang dihubungkan dengan lengan pemuntir sehingga menghasilkan gerak memuntir pada batang pemuntir, dapat kita lihat pada gambar di bawah 2.10 ini
TUAS PEMUNTIR
TABUNG PEMUNTIR
POROS GERAK
PENGGESER
Gambar 2.10 Menunjukkan Penampang dari Penggeser
d. Bola Berisi Cairan ( Liquid Filled Bulb )
Bola berisi cairan yang disambungkan dengan meterbodi dapat dipergunakan sebagai detektor untuk mengukur suhu.Perubahan suhu proses menyebabkan cairan pada bola mengembang dan memberikan tekanan yang lebih besar pada meterbodi element perasa sehingga elemen perasa ini bergerak, dapat kita lihat pada gambar 2.11 di bawah ini.
PENERIMA TEKANAN
PIPA KAPILER
Gambar 2.11 Menunjukkan Bola Berisi Cairan
B. Bagian Pengirim
Bagian pengirim dari transmitter pneumatik berfungsi untuk mengubah gerak-gerak mekanik detektor kedalam bentuk sinyal pneumatik, salah satu contoh dari bagian pengirim transmitter pneumatik adalah : Transmitter gaya seimbang. Bagian – bagian pokok dari transmitter ini adalah :
1. Penyetel titik nol
Berfungsi untuk mendapatkan titik nol dari batasan operasi transmitter.
2. Pengimbang kedua
Berfungsi sebagai batang yang meneruskan gaya gerak balas terhadap gaya gerak pengimbang utama.
3. Kapsul pengimbang balik
Kapsul yang berisi diafragma penggerak pengimbang kedua. 4. Pemancar
Berfungsi sebagai buangan udara penggerak diafragma besar pada relay pilot.
5. Pembalik
Berfungsi sebagai penutup. 6. Pembatas beban balik berlebih
Berfungsi sebagai ganjal pembatas gerak pengimbang utama 7. Pengimbang utama
Berfungsi sebagai batang penerus gerak – gerak mekanik setengah melingkar dari batang pemuntir pada detektor.
8. Pipa – pipa kapsul pengimbang
Berfungsi sebagai pipa penyalur udara penghasil gaya gerak balas terhadap gaya gerak utama
9. Pipa untuk pemancar
Berfungsi sebagai pipa penyalur udara untuk pemancar 10. Penyetel batasan lebar
Berfungsi sebagai penyetelan untuk memperlebar bidang gerak pengimbang utama
11. Penyetel batasan sempit
Berfungsi sebagai penyetelan untuk mempersempit bidang gerak pengimbang utama
12. Relai pitot
Berfungsi sebagai kerangan pengatur tekanan udara instrumen output dari transmitter
13. Pegas peninggi atau penekan
Berfungsi sebagai penyetelan untuk menaikkan skala perbandingan antara variabel proses dengan tekanan udara instrumen output.
Prinsip kerja dari transmitter gaya seimbang adalah
1. Pergerakan dari batang pemuntir menghasilkan pergerakan maju – mundur pada pengimbang utama
2. Bergeraknya pengimbang utama akan mengubah kedudukan pembalik sehingga menjauhi atau mendekati pemancar
3. Bila pembalik menjauhi pemancar maka “tekanan balik” udara penggerak diafragma besar pada relai pilot akan berkurang dari sebelumnya, sebaiknya bila pembalik mendekati pemancar, “tekanan balik” udara penggerak diafragma besar pada relay pilot akan bertambah dari sebelumnya
4. Berubahnya “tekanan balik” udara penggerak diafragma besar pada relay pilot akan mengubah perubahan karangan pilot pada relay untuk membuka atau menutup
5. Bila kerangan pilot membuka maka tegangan udara instrumen output bertambah, sebaliknya bila kerangan pilot menutup, tekanan udara instrumen output menjadi berkurang. Dengan demikian pergerakan dari batang pemuntir menghasilkan perubahan pada tekanan udara instrument output
6. Perhatikan bahwa udara instrumen output juga dikirim ke kapsul pengimbang balik
7. Tekanan udara instrumen output akan terus bertambah atau berkurang sampai pengimbang mendapat gaya balas yang sama besar dari kapsul pengimbang balik melalui pengimbang utama. 8. Sekali gaya pada pengimbang utama sama dengan gaya
pengimbang kedua maka tekanan udara instrumen output tidak berubah lagi.
2.5.2 Transmitter Listrik
Sama halnya dengan transmitter pneumatik, transmitter listrik juga terdiri dari dua bagian pokok, yaitu :
-. Bagian Perasa -. Bagian Pengirim
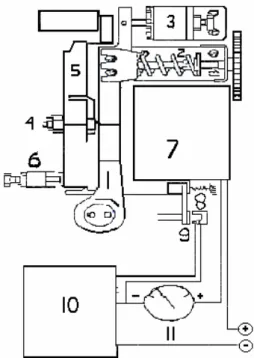
Transmitter listrik ini dapat kita lihat pada gambar di bawah 2.10 ini.
Gambar 2.12 Transmitter Listrik
Keterangan gambar :
1. Pengimbang utama
2. Pegas peninggi dan pegas titik nol 3. Peredam
4. penyetelan batasan 5. Pengimbang Kedua 6. Pembatas Langkah
7. Kesatuan Magnet 8. Pegas Bias 9. Detektor
10.Kesatuan O.P.D 11.Menunjukkan Out-put
Transmitter ini juga termasuk gaya seimbang, detektor pada transmitter ini dapat berupa meterbodi, sel beda tekanan, bola berisi cairan, dan penggeser. Prinsip kerja dari transmitter listrik ini adalah :
1. Batang pemuntir dari detektor ( Bagian Perasa ) disambungkan dengan pengimbang utama dari bagian pengirim, sehingga pergerakan dari batang pemuntir menghasilkan pergerakan dari pengimbang utama. 2. Pergerakan dari pembanding utama mengubah jarak antara kedua
ferrite dari detektor bagian pengirim.
3. Berubahnya jarak antara kedua ferrite menghasilkan perubahan pada induktansi pick-up coil
4. Perubahan induktansi dari pick-up coil menghasilkan perubahan pada out-put osilator
5. Perubahan pada out-put osilator menghasilkan perubahan pada nilai arus listrik yang keluar dari transmitter. Dengan demikian, perubahan pada variabel proses yang dirasakan oleh detektor pada bagian perasa dapat menghasilkan perubahan pada nilai arus listrik yang keluar pada bagian pengirim
6. Perhatikan bahwa sebagian dari out-put osilator dikirim ke kesatuan magnet sehingga akan terjadi gaya tolak – menolak pada kesatuan magnet. Gaya tolak – menolak pada kesatuan magnet akhirnya akan menghasilkan pergerakan pada penghubung kedua.
7. Pergerakan atau gaya pada penghubung kedua diteruskan ke pengimbang utama melalui penyetelan batasan. Gaya pengimbang kedua adalah melawan gaya pada pengimbang utama. Dengan demikian akan dihasilkan kedudukan dimana perubahan jarak antara ferrite akan sebanding dengan perubahan variabel proses yang dirasakan oleh detektor.