Jurnal Keteknikan Pertanian merupakan publikasi resmi Perhimpunan Teknik Pertanian Indonesia (PERTETA) yang didirikan 10 Agustus 1968 di Bogor, berkiprah dalam pengembangan ilmu keteknikan untuk pertanian tropika dan lingkungan hayati. Jurnal ini diterbitkan dua kali setahun. Penulis makalah tidak dibatasi pada anggota PERTETA tetapi terbuka bagi masyarakat umum. Lingkup makalah, antara lain: teknik sumberdaya lahan dan air, alat dan mesin budidaya, lingkungan dan bangunan, energi alternatif dan elektrifikasi, ergonomika dan elektronika, teknik pengolahan pangan dan hasil pertanian, manajemen dan sistem informasi. Makalah dikelompokkan dalam invited paper yang menyajikan isu aktual nasional dan internasional, review perkembangan penelitian, atau penerpan ilmu dan teknologi, technical paper hasil penelitian, penerapan, atau diseminasi, serta research methodology berkaitan pengembangan modul, metode, prosedur, program aplikasi, dan lain sebagainya. Pengiriman makalah harus mengikuti panduan penulisan yang tertera pada halaman akhir atau menghubungi redaksi via telpon, faksimili atau e-mail. Makalah dapat dikirimkan langsung atau via pos dengan menyertakan hard- dan soft-softcopy, atau e-mail. Penulis tidak dikenai biaya penerbitan, akan tetapi untuk memperoleh satu eksemplar dan 10 re-prints dikenai biaya sebesar Rp 50.000. Harga langganan Rp 70.000 per volume (2 nomor), harga satuan Rp 40.000 per nomor. Pemesanan dapat dilakukan melalui e-mail, pos atau langsung ke sekretariat. Formulir pemesanan terdapat pada halaman akhir.
Penanggungjawab:
Ketua Perhimpunan Teknik Pertanian Indonesia
Ketua Departemen Teknik Mesin dan Biosistem, Fakultas Teknologi Pertanian, IPB Dewan Redaksi:
Ketua : Wawan Hermawan Anggota : Asep Sapei
Kudang B. Seminar Daniel Saputra Bambang Purwantana Y. Aris Purwanto Redaksi Pelaksana:
Ketua : Rokhani Hasbullah Sekretaris : Satyanto K. Saptomo Bendahara : Emmy Darmawati Anggota : Usman Ahmad
I Wayan Astika M. Faiz Syuaib Ahmad Mulyawatullah Diana Nursolehat Penerbit:
Perhimpunan Teknik Pertanian Indonesia (PERTETA) bekerjasama dengan Departemen Teknik Mesin dan Biosistem, IPB Bogor
Alamat:
Jurnal Keteknikan Pertanian, Departemen Teknik Teknik Mesin dan Biosistem, Fakultas Teknologi Pertanian,
Kampus IPB Darmaga, Bogor 16680. Telp. 0251-8624691, Fax 0251-8623026, E-mail: [email protected] atau [email protected]. Website: ipb.ac.id/~jtep. Rekening:
BRI, KCP-IPB, No.0595-01-003461-50-9 a/n: Jurnal Keteknikan Pertanian Percetakan:
PT. Binakerta Adiputra, Jakarta
Ucapan Terima Kasih
Redaksi Jurnal Keteknikan Pertanian mengucapkan terima kasih kepada para Mitra Bestari yang telah menelaah (mereview) naskah pada penerbitan Vol. 25 No. 2 Oktober 2011. Ucapan terima kasih disampaikan kepada: Prof. Dr. Ir. Hasbi, M.Si (Fakultas Pertanian, Universitas Sriwijaya), Prof. Dr.Ir. Daniel Saputra, MS (Fakultas Pertanian, Universitas Sriwijaya), Prof.Dr.Ir. Roni Kastaman, MT (Departemen Teknik Pertanian, Universitas Padjadjaran), Prof.Dr.Ir. Tineke Mandang, MS (Departemen Teknik Mesin dan Biosistem, Fakultas Teknologi Pertanian, IPB), Ir. Totok Prawitosari, MS (Universitas Hasanuddin), Dr. Arief RM Akbar,M.Si (Fakultas Pertanian, Universitas Lambung Mangkurat), Dr.Ir. Budi Rahardjo, MSAE (Departemen Teknik Pertanian, Fakultas Teknologi Pertanian, UGM), Dr.Ir. Radite Praeko A.S, MS (Departemen Teknik Mesin dan Biosistem, Fakultas Teknologi Pertanian, IPB), Dr.Ir. Wawan Hermawan,MS (Departemen Teknik Mesin dan Biosistem, Fakultas Teknologi Pertanian IPB), Dr.Ir. Leopold O.Nelwan, M.Si (Departemen Teknik Mesin dan Biosistem, Fakultas Teknologi Pertanian, IPB), Dr.Ir. Y. Aris Purwanto,M.Sc (Departemen Teknik Mesin dan Biosistem, Fakultas Teknologi Pertanian, IPB), Dr.Ir. Rokhani Hasbullah, M.Si (Departemen Teknik Mesin dan Biosistem, Fakultas Teknologi Pertanian IPB), Dr.Ir. Yandra, M.Eng (Departemen Teknologi Industri Pertanian, Fakultas Teknologi Pertanian IPB).
Pendahuluan
Latar Belakang
Indonesia sebagai negara Agraris tentunya sangat membutuhkan mesin-mesin pertanian dalam meningkatkan produktivitas lahannya. Dengan adanya mesin tersebut, penyiapan lahan bisa dilakukan lebih cepat dan tepat waktu. Demikian juga kegiatan pemeliharaan tanaman, pemanenan dan penanganan pasca panen hasil pertanian bisa dilakukan dengan lebih baik. Namun demikian belum semua pekerjaan dibidang pertanian bisa dilakukan dengan mesin konvensional. Pekerjaan yang belum bisa dilakukan menggunakan mesin konvensional adalah pekerjaan yang memerlukan
tingkat selektifitas, seperti kegiatan pemanenan untuk komoditas buah tomat, buah cabai merah, buah paprika, buah jeruk dan lain-lain.
Untuk mengatasi kelemahan mesin konvensional tersebut, maka perlu dikembangkan mesin yang lebih cerdas sehingga mampu melakukan kegiatan yang memerlukan pengambilan keputusan. Mesin yang dilengkapi dengan kemampuan berfikir dikenal sebagai robot. Robot sebagai salah satu produk dari teknologi robotika dirancang untuk bekerja secara otomatis dan mampu melakukan suatu pekerjaan selektif seperti yang biasa dilakukan oleh manusia. Robot yang dirancang untuk melakukan tugas dibidang pertanian disebut sebagai robot pertanian. Robot pertanian atau yang umum dikenal
Technical Paper
Rancangan End-effector untuk Robot Pemanen Buah Paprika
An End-effector Design for a Sweet Pepper Harvesting Robot
I Dewa Made Subrata1 dan Ichsan Nurfitra2
Abstract
A research on designing an end-effector for a sweet pepper (Capsicum grossum) harvesting robot has been conducted. The objectives of this research were to design an end-effector prototype for the sweet pepper harvesting robot and to examine the performance of the end-effector in actuating the harvesting work. The end-effector was constructed in such a way so that enable to perform cutting and gripping motion in one action. The end-effector was designed using aluminum materials in order to get as light mass as possible. It dimension was 28 cm in length, 14 cm in width, and about 90 grams in weight. The field test of the prototype was conducted based on the conditions of plantation inside the greenhouse. Three kinds of inclination slope including 0O, 10O, and 20O were treated for the end-effector installation. The experimental
result show that the third installation treatment ie: the end-effector with 20O inclination slope tend to produce
the best performance which has the highest number of harvesting succeed.
Keywords: end-effector, harvesting, sweet pepper.
Abstrak
Penelitian mengenai rancang bangun end-effector robot pemanen buah paprika (Capsicum grossum) telah berhasil dilakukan. Tujuan dari penelitian ini adalah merancang bangun prototype end-effector untuk memanen buah paprika dan menguji unjuk kerja dari end-effector tersebut dalam melakukan pekerjaan pemanenan. End-effector tersebut dibuat sedemikian rupa sehingga mampu melakukan gerak pemotongan dan pencengkraman dalam waktu bersamaan. End-effector dibuat menggunakan bahan aluminium supaya masanya menjadi ringan. End-effector mamiliki ukuran panjang 28 cm, lebar 14 cm dan berat 90 gram. Pengujian terhadap prototype dilakukan sesuai kondisi tanaman dalam greenhouse. Tiga perlakuan nilai sudut kemiringan pemasangan yaitu: 0O, 10O, dan 20O dicobakan dalam pengujian ini. Hasil pengujian
menunjukkan bahwa perlakuan ketiga yaitu end-effector dipasang dengan kemiringan 20O cenderung
memberikan unjuk kerja terbaik karena memberikan keberhasilan pemanenan tertinggi. Kata kunci: End-effector, pemanenan, buah paprika.
Diterima: 15 Maret 2011; Disetujui: 18 Juli 2011
1 Departemen Teknik Pertanian, Fakultas Teknologi Pertanian, Institut Pertanian Bogor. Po Box 220, Kampus IPB Darmaga – Bogor. Email: [email protected]
2 Mahasiswa S1, Departemen Teknik Pertanian, Fakultas Teknologi Pertanian, Institut Pertanian Bogor. Po Box 220, Kampus IPB
88
Vol. 25, No. 2, Oktober 2011
sebagai robot bioproduksi memiliki struktur dasar a.l: manipulator, end-effector, sistem pengindera, sistem pengangkut (travelling device), dan sistem pengendali. Struktur dasar tersebut saling terkait satu sama lain sehingga tidak bisa dihilangkan.
End-effector atau sering disebut sebagai tangan robot merupakan mekanisme yang dipasang pada ujung bebas manipulator (lengan robot) dan berfungsi untuk menangani benda secara langsung.
End-effector sebagai salah satu struktur dasar robot memiliki peranan yang cukup penting karena berhubungan langsung dengan objek yang ditangani. Kegagalan fungsi end-effector menyebabkan mutu produk menjadi rendah sehingga nilai ekonomisnya menurun. Rancangan end-effector sangat tergantung kepada objek yang ditangani dan seringkali dirancang khusus untuk satu jenis objek. Di negara maju seperti Jepang, Amerika dan Eropa telah banyak dilakukan penelitian yang berhubungan dengan end-effector robot bioproduksi.
Fujiura et al., (1990) merancang end-effector untuk robot memanen buah jeruk summer. End-effector ini terdiri dari tiga buah jari lentur yang dikombinasikan dengan sistem potong berbentuk mekanisme gunting. Jari lentur dipergunakan untuk memegang badan buahnya sedangkan sistem potongnya dipergunakan untuk memotong tangkai buah yang telah dipegang oleh jari lentur. Kedekatan posisi end-effector terhadap buah jeruk target diketahui melalui optical proximity sensor yang dipasang pada end-effector tersebut.
Harrell et al., (1990) juga merancang end-effector tipe potong untuk robot pemanen jeruk manis. End-effector ini dilengkapi dengan dua jenis sensor yaitu vision sensor untuk mendeteksi keberadaan dan titik pusat buah dan ultrasonic transducer untuk menentukan jarak target dari end-effector. Keberadaan end-effector terhadap lokasi target dimonitor secara kontinyu dengan kecepatan sampling 60 Hz. Kecepatan pemanenan untuk tiap buah jeruk dilaporkan bervariasi antara 3 sampai 7 detik. Tingkat keberhasilan end-effector dilaporkan sebesar 75%.
Kondo et al., (1993) mengembangkan end-effector tipe grip yang dilengkapi dengan mekanisme penghisap untuk robot pemanen tomat. Untuk menghindari slip dan kerusakan buah, maka pada grip dipasang karet dengan ketebalan 10 mm. Gaya cengkeram dari grip bisa diatur dari 0 sampai 33.3 N. Mekanisme hisap dipasang pada titik tengah dari ruang diantara dua jari grip. Mekanisme hisap ini diaktifkan oleh pompa vacuum yang memiliki gaya hisap 10 N. Mekanisme hisap ini bisa digerakkan maju mundur dengan kecepatan 38 mm / dt untuk menghisap buah tomat kemudian menariknya sehingga berada pada posisi ruang di antara dua grip. Buah yang ditarik oleh mekanisme hisap akan terpisah dari buah lain dalam klaster yang sama
sehingga mudah dipegang oleh grip. Pelepasan buah dilakukan melalui gerakan menekuk yang dikombinasikan dengan gerakan menarik sehingga buah lepas pada ruas tangkainya.
Arima et al. (1994) merancang end-effector berbentuk dua jari grip untuk robot pemanen mentimun. End-effector ini dilengkapi dengan detektor berupa potensiometer dan pemotong tangkai buah. Pemanenan dilakukan dengan terlebih dahulu menjepit buah pada posisi 3 cm dibawah tangkai dengan gaya 6 N, kemudian pendeteksi dan pemotong bergerak ke atas menyusuri permukaan buah sampai ditemukan daerah batas antara pangkal buah dan tangkai. Setelah tangkainya terdeteksi kemudian dipotong menggunakan pisau dengan gaya potong 12 N
Monta et al., (1994). merancang End-effector berbentuk empat jari fleksibel yang dilengkapi dengan pad penghisap untuk robot pemanen tomat besar. Pad pengisap ini mampu menyedot buah secara pneumatic untuk memisahkan buah dari tangkainya pada saat pad bergerak mundur. Hal ini didasarkan pada posisi buah yang mengumpul dan tangkai buahnya saling berdekatan. Dengan menggunakan konstruksi jari fleksibel, maka buah tomat bisa dipegang lebih baik. Untuk menghindari kerusakan buah, maka pangkal jari dilapisi karet setebal 5 mm. Pemanenan dilakukan dengan memuntir buah.
Satou et al., (1996) marancang end-effector tipe hisap untuk robot pemanen buah stawberi. End-effector dilengkapi dengan 3 pasang photo-interupter untuk mendeteksi keberadaan buah didalam end-effector. Pada saat posisi tangkai tepat, maka pisau pemotong digerakkan untuk memotong tanggai buah sehingga buah terhisap masuk ke wadah penampungan.
Reed et al., (1995). merancang end-effector tipe hisap untuk robot pemanen jamur merang. Bagian penghisap tersebut dikendalikan menggunakan pneumatic silinder sehingga mampu berputar sebesar 120°. Sistem penghisap dikombinasikan dengan sebuah suction inducer sehingga memungkinkan untuk di lakukan perubahan kondisi dari vacuum ke kondisi menghembus untuk mempercepat pelepasan jamur dari pad penghisap saat menaruh di wadah penampungan.
Iida et al., (1996) merancang end-effetor tipe grip empat jari untuk robot pemanen semangka. Tiap ujung jari grip dilengkapi dengan roller untuk menelusuri permukaan luar buah pada saat melakukan gerakan pengambilan buah. End-effector dirancang untuk mampu menangani buah dengan diameter 180 – 300 cm yang memiliki massa maksimum 13 kg. Dilaporkan bahwa end-effector ini mampu memanen semangka meskipun koordinatnya menyimpang 50 mm dari pusat buah.
Selain beberapa penelitian di atas terdapat juga end-effector yang dibuat oleh Wardhana (2001) untuk memanen cabai merah besar. End-effector
ini menggunakan mekanisme potong pada tangkai buahnya dengan cara menariknya ke arah pisau dan membiarkan hasil panen jatuh ke tanah.
Di Indonesia, teknologi robotika pertanian belum berkembang dengan baik, oleh karena itu untuk mengantisipasi ketertinggalan teknologi tersebut maka perlu dijajaki kemungkinan pengembangannya dalam bidang pertanian khususnya dalam greenhouse. Dalam penelitian ini dipilih buah paprika sebagai contoh kasus.
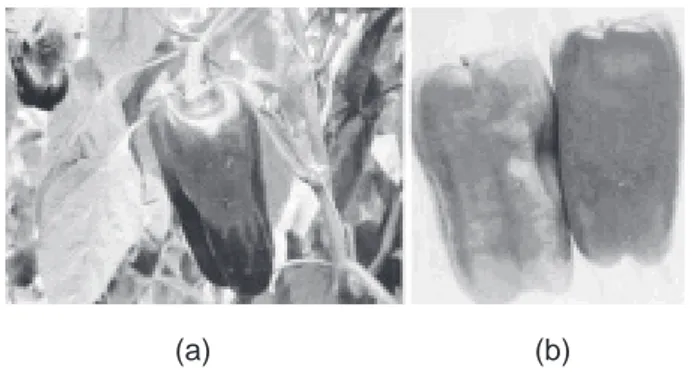
Tanaman paprika termasuk ke dalam famili Solanaceae karena mempunyai bentuk bunga seperti terompet. Berbeda dengan tanaman cabai lainnya seperti cabai besar, cabai keriting, atau cabai rawit, tanaman paprika tumbuh lebih kompak dan rimbun. Daun umumnya berukuran lebih besar dan berwarna hijau gelap. Bentuk buah paprika mirip cabai besar atau tomat, tetapi lebih bulat, pendek, dan tampak seperti genta dengan permukaan bergelombang besar atau bersegi-segi yang jelas (Prihmantoro dan Indriani, 2003).
Tinggi pohon paprika berkisar antara 60-70 cm. Ukuran panjang dan diameter buah bervariasi untuk tiap jenis paprika. Panjang buah terkecil yaitu 9 cm, dimiliki oleh varietas Beauty Bell, dan panjang terbesar dapat mencapai 18 cm yang dimiliki oleh varietas Jumbo Sweet. Diameter paprika dari semua varietas yang ada berkisar antara 3.7 – 9 cm. Bobot buahnya pun bervariasi antara 30 – 200 gram (Prihmantoro dan Indriani, 2003).
Contoh buah paprika dapat dilihat pada Gambar 1a dan 1b.
Tujuan
Tujuan umum dari penelitian ini adalah merancang end-effector untuk robot pemanen paprika. Sedangkan tujuan khusus dari penelitian ini yaitu merancang bangun dan menguji kemampuan end-effector dalam menjangkau, memotong, serta menjepit tangkai buah paprika tanpa jatuh ke tanah.
Bahan dan Metode Penelitian
Waktu dan Tempat
Penelitian ini dilaksanakan pada bulan Juni 2006 sampai dengan bulan September 2006, bertempat di Bagian Ergotronika, Departemen Teknik Pertanian, Fakultas Teknologi Pertanian, Institut Pertanian Bogor.
Instrument Penelitian
Pada penelitian ini dipergunakan beberapa bahan antara lain:
1. Plat aluminium (12 mm, 4 mm).
2. Pisau stainless steel dengan ketebalan 2 mm. 3. Poros aluminium φ 13 mm.
4. Ulir standar M6 (JIS B 0205).
5. Ball bearing diameter dalam 6 mm, diameter luar 13 mm).
6. Gir
7. Baud, mur, dan ring sebagai pengencang. 8. Karet ban dalam sepeda.
9. Motor DC Büehler 25.5 Volt.
10. Komponen elektronika, diantaranya:
a. Rangkaian terpadu (L298, LM7410, LM7805, LM317).
b. Plat PCB (Papan tempat memasang dan menyolder komponen elektronika).
c. Beberapa jenis kapasitor, resistor, dan transistor.
11. Kertas karton. 12. Benang dan jarum.
13. Tanaman dan buah paprika.
Peralatan yang digunakan dalam penelitian ini yaitu:
1. Peralatan perbengkelan, di antaranya: mesin bubut, mesin bor duduk, mesin gergaji, mesin gerinda duduk, mesin scrap, gerinda tangan, jangka sorong, klem, tang, serta obeng.
2. Peralatan elektronika, antara lain: solder, kawat timah, pasta, penghisap timah, multitester, dan project board.
3. Peralatan tulis seperti pensil, jangka, penggaris, busur derajat, dan penghapus.
4. Rel untuk pengujian.
Pendekatan Rancangan
Kriteria Rancangan
Rancangan dari end-effector robot pemanen paprika ini dibuat dengan mempertimbangkan beberapa fungsi yang harus mampu dilakukan sesuai dengan struktur komoditas yang akan dipanen, dalam hal ini buah paprika. Beberapa hal yang menjadi pertimbangan dalam merancang end-effector robot pemanen paprika ini diantaranya: 1. End-effector harus mampu memanen buah
paprika pada bagian tangkai buahnya, tanpa merusak tanaman serta buah paprika tersebut. Buah yang mengalami kerusakan akan
(a) (b)
Gambar 1. Paprika (Capsicum grossum): (a) buah yang masih berada pada pohon; (b) buah yang sudah dipetik dengan memotong tangkai buahnya.
90
Vol. 25, No. 2, Oktober 2011
mengurangi kualitas penampakan serta akan lebih mudah mengalami kebusukan, sehingga nilai jualnya akan turun.
2. Sedapat mungkin buah paprika yang dipetik tidak terlepas dari end-effector atau terjatuh ke tanah sebelum perioda waktu 15 menit sejak pemetikan demi menghindari kerusakan fisik pada buah akibat benturan.
3. End-effector diharapkan mampu memanen targetnya tidak hanya dari arah depan, namun juga dari arah samping dengan sudut tertentu. 4. Massa dari end-effector diusahakan cukup
ringan, sehingga mampu ditopang oleh ujung manipulator.
5. Dimensi end-effector tidak terlalu besar, sehingga mampu menjangkau buah paprika yang berada
di bagian dalam rumpun tanaman.
6. Konstruksi cukup sederhana sehingga tidak memerlukan banyak tenaga penggerak dan sistem pengendaliannya sederhana.
Rancangan End-effector.
Secara keseluruhan rancangan end-effector robot pemanen buah paprika dapat dilihat pada Gambar 2. End-effector tersebut terdiri dari bagian-bagian utama a.l: Dua buah jari grip, rel, pisau pemotong, ulir, pegas, gear, motor DC, limit switch, motor driver, dan rangka penunjang.
Dua buah jari grip berfungsi untuk memegang dan menggerakkan tangkai buah paprika kearah pisau pemotong sehingga terjadi gerakan pemotongan. Dari kedua jari grip tersebut, satu dilengkapi
(a) (b)
Gambar 2. End-effector robot pemanen paprika: (a) Tampak atas; (b) Tampak depan
dengan lubang berulir sedangkan jari lainnya yang bersentuhan dengan pegas tidak dilengkapi dengan lubang berulir. Gerakan menggenggam dan memotong terjadi akibat perputaran ulir daya yang terpasang pada jari berulir. Gerakan memotong dihentikan oleh limit switch yang ada pada sisi berdekatan dengan pegas sedangkan gerakan melepas tangkai buah dihentikan oleh limit switch yang ada pada sisi yang berlawanan. Gerakan kedua jari dipandu oleh dua batang rel berbentuk as sehingga gerakannya lurus ke samping. Masing-masing ujung jari grip bagian depan dibuat mengecil membentuk dua buah lengkungan yang saling berhadapan satu sama lain, sehingga jika kedua batang bertemu akan terdapat celah selebar 12 mm di tengahnya. Bagian inilah yang merupakan wilayah kerja dari jari grip. Pada daerah lengkung bagian dalam dilapisi spons setebal 4 mm dan karet setebal 1 mm. Spons berfungsi untuk memberikan efek penjepitan yang lebih baik tanpa merusak tangkai buah paprika yang akan dipanen, sedangkan lapisan karet berguna menahan agar tidak terjadi slip pada tangkai buah sehingga hasil panen tidak terjatuh.
Pisau pemotong dipasang menyudut 60° terhadap sumbu ulir sehingga mampu memotong tangkai buah paprika sampai putus. Posisi pisau pada proses pemanenan berada di atas jari grip tanpa ulir. Ujung pisau dan ujung jari grip tanpa ulir bertemu pada satu titik, sehingga proses pemotongan baru dimulai setelah tangkai buah tergenggam di antara kedua jari grip
Pegas dipasang pada jari tanpa ulir untuk menjamin gaya cengkram jari tersebut cupuk untuk tetap memegang tangkai buah pada saat pemotongan maupun sesudah pemotongan selesai. Pegas ini juga berfungsi untuk mendorong jari tanpa ulir bergerak ke posisi awal pada saat meletakkan
buah di wadah penampungan. Mekanisme pegas dan ulir pada end-effector ini memungkinkan gerakan memegang dan memotong berlangsung menggunakan satu motor penggerak.
Motor beserta spur gear dan ulir pendorong berfungsi untuk menggerakkan jari grip pada proses pemegangan, pemotongan, dan pelepasan tangkai buah paprika. Motor yang digunakan adalah motor DC merk Büehler 25.5 V. Ulir yang digunakan adalah ulir standar M6 yang diameter efektifnya sebesar 6 mm. Unit transmisi daya menggunakan sistem gir dengan rasio putaran 40/21. Gir pada poros motor berdiameter 4 cm dengan jumlah gigi 40 buah, sedangkan gir pada poros ulir berdiameter 2 cm dengan jumlah gigi 21 buah.
Rangka penunjang berfungsi sebagai tempat dudukan semua komponen pembentuk end-effector.
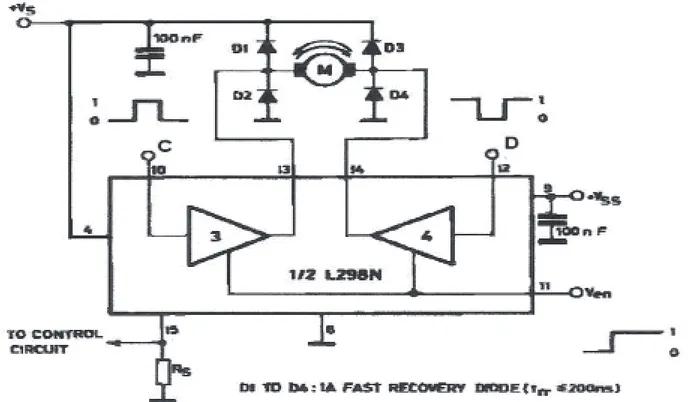
Tabel 1. Prinsip kerja rangkaian pengendali motor DC.
Input Fungsi
Ven = 1 C = 1 ; D = 0 As motor berputar searah jarum jam (Gerakan menutup jari grip) C = 0 ; D = 1 Berputar berlawanan arah jarum jam (Gerakan membuka jari grip)
C = D Berhenti
Ven = 0 C = X ; D = C Berhenti untuk putaran bebas Tabel 2. Tabel kebenaran rangkaian Gambar 4
Gambar 4. Rangkaian pengendali putaran motor
Gambar 5. Mekanisme pengujian end-effector robot pemanen buah paprika pada sudut hadap
92
Vol. 25, No. 2, Oktober 2011
Sistem kendali end-effector berfungsi untuk mengendalikan arah putaran motor serta mengendalikan waktu mulai dan berhentinya motor berputar. Arah putaran motor DC dapat diubah dengan menukar pemberian catu daya pada kutub-kutubnya menggunakan rangkaian H-bridge motor controller jenis L298 seperti pada Gambar 3 dan Tabel 1.
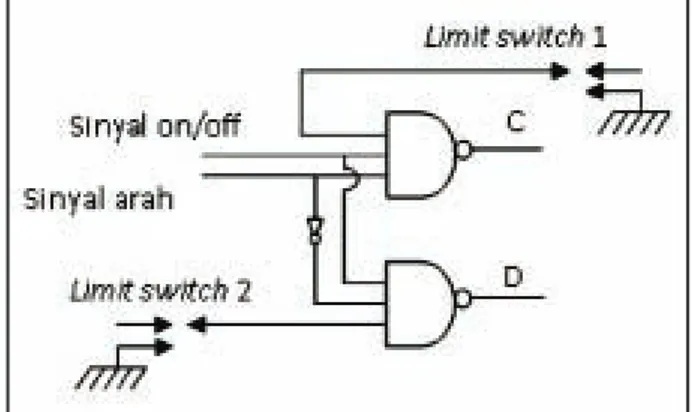
Waktu mulai dan berhentinya perputaran motor diatur dengan kontrol on-off menggunakan rangkaian pada Gambar 4 dan Tabel 2.
Gambar 4 berfungsi mengendalikan nilai biner masukan C dan D dari rangkaian Gambar 3, sedangkan jalur Ven (Gambar 3) diberi nilai tetap yaitu nilai biner 1 (tegangan DC 5V). Gambar 4 dikendalikan melalui dua sinyal masukan yaitu sinyal On/Off dan sinyal arah. Motor penggerak jari grip akan On saat jalur On/Off diberi nilai biner 1 dan Off saat diberi nilai biner 0 (DC 0V) . Jari grip akan bergerak menutup dan mendekati pisau pemotong saat jalur arah diberi nilai biner 0 dan sebaliknya jari grip bergerak menjauhi pisau pemotong/ membuka jepitan grip saat jalur arah diberi nilai biner 1. Pengamatan.
Kinerja dari prototipe end-effector robot pemanen buah paprika ini dianalisa terhadap keberhasilan pemanenan buah paprika, kemampuan
menggenggam tangkai buah, serta pemotongan tangkai buah, yang dilakukan dari sudut yang berbeda-beda dalam arah mendatar.
Pergerakan end-effector dari koordinat awal ke koordinat target dilakukan secara manual dengan tuntunan mekanisme rel. Jarak dari koordinat awal ke koordinat target ditentukan berdasarkan data jarak tanam paprika (jarak antara dua bedengan) dalam greenhouse. Untuk mengantisipasi panjang dan orientasi tangkai buah yang tidak seragam, maka pemasangan end-effector dicoba dengan 3 sudut kemiringan terhadap sumbu horizontal yaitu 0O, 10O, dan 20O. Hasil percobaan dicatat dan
diplotkan ke dalam grafik. Mekanisme pengujian end-effector dapat dilihat pada Gambar 5 dan 6.
Hasil dan Pembahasan
Pembuatan prototipe end-effector robot pemanen paprika ini melalui beberapa proses pengerjaan mulai dari pemotongan, penghalusan dengan gerinda, dan pengeboran untuk membuat bagian-bagiannya. Setelah itu tiap-tiap bagian disatukan dengan menggunakan baud, mur, serta lem. Khusus untuk komponen elektronika dibuat di atas plat PCB dengan cara disolder yang kemudian diletakkan di sisi atas end-effector.
Sebelum dicoba dengan tiga perlakuan sudut kemiringan, yaitu 0O (datar), 10O, dan 20O, prototipe
end-effector ini dicoba terlebih dahulu kemampuan menjepit dan memotong tangkai, dengan cara menempatkan tangkai buah paprika yang akan dipotong di dalam area pemotongan pada end-effector tersebut. Pada percobaan pendahuluan ini area penggenggaman end-effector hanya dilapisi spons.
Hasil percobaan pendahuluan menunjukkan bahwa end-effector mampu memotong namun tidak mampu menggenggam dengan kuat tangkai buah paprika agar tidak terjatuh. Hal ini disebabkan permukaan spons yang terlalu licin bagi tangkai buah, sehingga tangkai buah tidak dapat tergenggam dengan baik, yang pada akhirnya Tabel 3. Performansi end-effector dengan tiga sudut kemiringan.
Gambar 6. Perlakuan sudut pemasangan end-effector.
buah paprika langsung terjatuh. Namun setelah dilakukan modifikasi dengan pemberian lapisan karet pada bagian dalam area genggaman jari grip end-effector, maka tangkai buah dapat tergenggam dengan baik dan buah tidak terjatuh. Dengan demikian pengamatan unjuk kerja end-effector menggunakan tiga perlakuan sudut kemiringan dapat dilakukan.
Ukuran keberhasilan dari rancangan end-effector robot pemanen buah paprika ini ditentukan berdasarkan pada kemampuan end-effector untuk memotong sasaran, yakni tangkai buah, serta menjepitnya dengan baik sehingga buah paprika tidak terjatuh. Setelah end-effector berhasil melakukan pemotongan dan penjepitan maka end-effector ditarik mundur dan dilakukan penghitungan waktu lamanya penjepitan hingga buah paprika terjatuh. Apabila sampai dengan 15 menit buah paprika tidak terjatuh maka penghitungan pun dihentikan. Hal ini didasarkan pertimbangan bahwa buah akan selesai diletakkan dalam wadah penampungan sebelum waktu 15 menit sejak buah terpanen
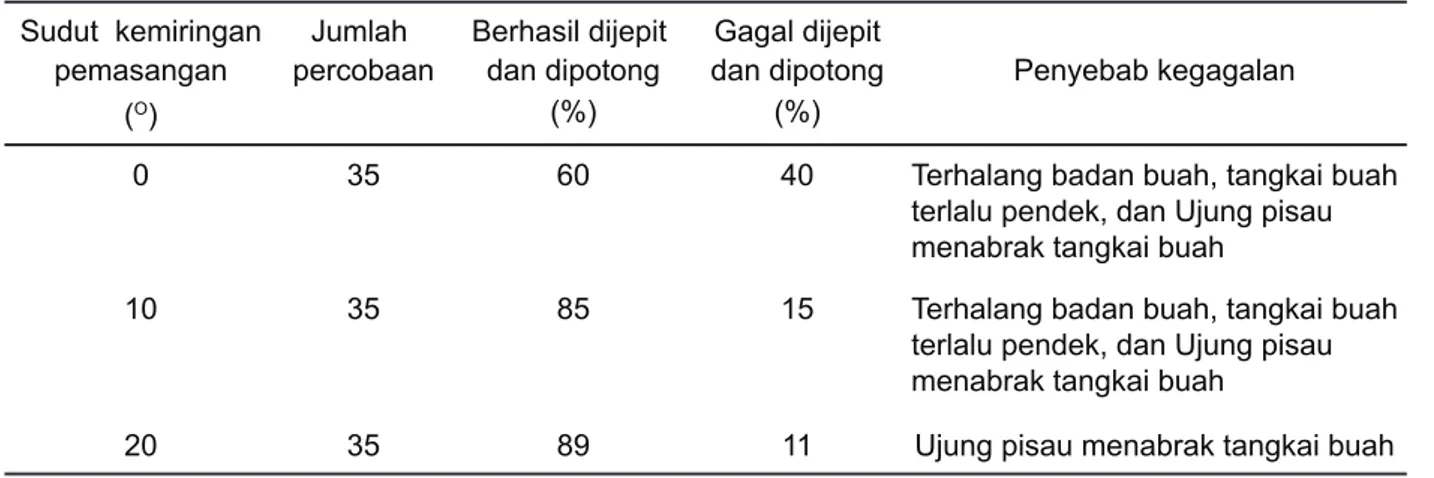
Hasil pemanenan end-effector dengan tiga sudut kemiringan dapat dilihat pada Tabel 3, Gambar 7, 8 dan 9. Dari tabel dan gambar tersebut dapat dilihat bahwa pemasangan end-effector dengan sudut
Gambar 7. Hasil pemanenan end-effector dengan kemiringan 0O.
Berhasil
Gagal akibat terhalang badan buah Gagal akibat tangkai terlalu pendek Gagal akibat terganjal pisau Gagal akibat tidak terjangkau
60% 40%
6%
11% 9%
14%
Gambar 8. Hasil pemanenan end-effector dengan kemiringan 10O.
Berhasil
Gagal akibat terhalang badan buah Gagal akibat tangkai terlalu pendek Gagal akibat terganjal pisau
85% 14%
9%
3%
3%
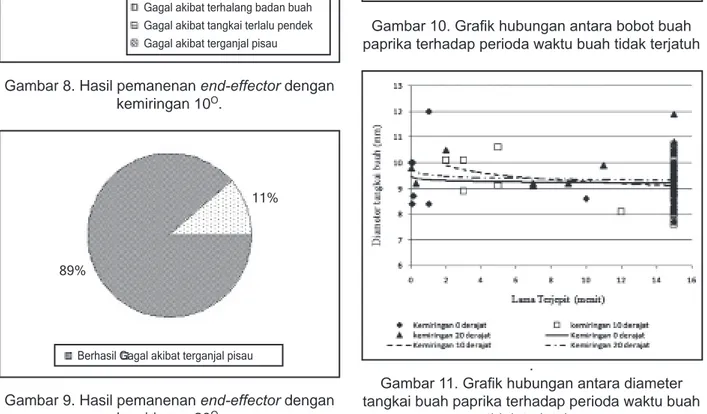
Gambar 9. Hasil pemanenan end-effector dengan kemiringan 20O.
Berhasil Gagal akibat terganjal pisau
89%
11%
Gambar 10. Grafik hubungan antara bobot buah paprika terhadap perioda waktu buah tidak terjatuh
.
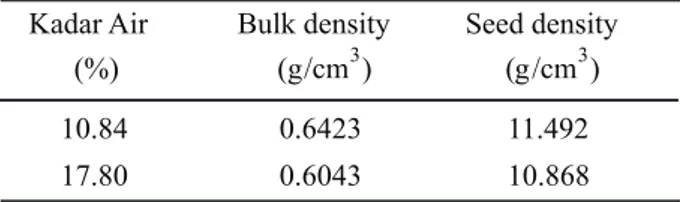
Gambar 11. Grafik hubungan antara diameter tangkai buah paprika terhadap perioda waktu buah
94
Vol. 25, No. 2, Oktober 2011
kamiringan 20O memberikan performansi paling baik
karena jari end-effector paling mampu menjangkau tangkai buah.
Selain keberhasilan pemotongan dan penggenggaman, pengamatan juga dilakukan untuk mengetahui hubungan antara bobot buah paprika terhadap perioda waktu tangkai buah tergenggam sampai terjatuh (Gambar 10), serta grafik hubungan antara diameter tangkai buah paprika terhadap perioda waktu tangkai buah tergenggam sampai buah terjatuh (Gambar 11). Perioda waktu pada pengujian ini hanya dibatasi selama 15 menit, dan semua sample yang masih tergenggam selama perioda waktu 15 menit diplot pada perioda waktu 15 menit.
Dari grafik pada Gambar 10 dan Gambar 11 dapat dilihat bahwa jumlah pengamatan end-effector yang berhasil mempertahankan buah agar tidak terjatuh sebelum 15 menit penggenggaman, adalah: sebanyak 26 percobaan (74.3%) dari total 35 pengamatan untuk sudut kemiringan 0O, sebanyak
25 percobaan (83.3%) dari total 30 pengamatan untuk sudut kemiringan 10O, dan sebanyak 25
percobaan (80.6%) dari total 31 pengamatan untuk sudut kemiringan 20O. Banyaknya buah yang jatuh
sebelum perioda waktu 15 menit menunjukkan bahwa lapisan karet yang dipasang pada permukaan dalam area penggenggaman end-effector belum sepenuhnya mampu meniadakan buah yang jatuh ke tanah, sehingga perlu dilakukan penyempurnaan lebih lanjut.
Kesimpulan dan Saran
Kesimpulan
Pada penelitian ini telah dibuat sebuah prototipe end-effector robot pemanen buah paprika berupa mekanisme dua jari grip yang dipadukan dengan mekanisme pemotong.
Dari tiga perlakuan kemiringan sudut pemasangan end-effector yang dicoba (0O,
10O, dan 20O) diperoleh hasil terbaik pada
perlakuan kemiringan 20O dengan keberhasilan
penggenggaman dan pemotongan sebesar 89%. Dari hasil pengamatan perioda waktu pengenggaman terlihat bahwa end-effector dengan sudut kemiringan 20O memiliki kemampuan sebesar
80.6% untuk tetap menggenggam tangkai buah selama 15 menit.
Saran
Perlu dilakukan modifikasi pada bagian dalam area penggenggaman end-effector sehingga mampu menggenggam tangkai buah dengan lebih kuat.
Ucapan Terima Kasih
Pada kesempatan ini disampaikan terima kasih kepada Direktorat Jenderal Pendidikan Tinggi, Departemen Pendidikan Nasional yang telah membiayai penelitian ini melalui Projek DUE-like Tahun anggaran 2006. ’
Daftar Pustaka
Arima, S., N. Kondo, Y. Shibano, T. Fujiura, J. Yamashita, and H. Nakamura. 1994. Study on Cucumber Harvesting Robot (Part 2). Journal of the Japanese Society of Agricultural Machinery, Vol.56(6) hal. 69 – 76.
Fujiura, T., M. Ura, N. Kawamura, and K. Namikawa. 1990. Fruit Harvesting Robot for Orchard. Journal of the Japanese Society of Agricultural Machinery. Vol.52(2) hal.35-42.
Harrell, R. C., P. D. Adsit, T. A. Pool, and R. Hoffman. 1990. The Florida Robotic Grove-Lab. Trans. Am. Society of Agricultural Engineering. Vol.33 hal. 391 – 399.
Iida, M., K. Furube, K. Namikawa, and M. Umeda. 1996. Development of watermelon harvesting gripper. Journal of the Japanese society of Agricultural Machinery. Vol.58(3) hal. 19 – 26. Kondo, N., M. Monta, Y. Shibano, and K. Mohri. 1993.
Two finger harvesting hand with absorptive pad based on physical properties of tomato. Environ. Control Biol. Vol.31(2) hal.87 – 92.
Kondo et al. 1998. Robotics for Bioproduction Systems. ASAE, St. Joseph, MI, USA.
Monta, M., N. Kondo, K.C. Ting, G. A. Giacomelli, D. R. Mears, and Y. Kim. 1996. End-effector for Tomato Harvesting Robot. ASAE paper 96-3007. st. Joseph, MI: American Society of Agricultural Engineers
Prihmantoro, H, dan Y. H. Indriani. 2003. Paprika Hidroponik dan Nonhidroponik. Penebar Swadaya. Jakarta.
Reed, J.N., W. He, and R. D. Tillett. 1995. Picking Mushrooms by Robot. Proceedings of the International Symposium on Automation and Robotics in Bioproduction and Processing, Vol.1 hal.27 – 34. Tokyo: Japanese Society of Agricultural Machinery.
Satou, Y., H. Takenaga, and K. Imou. 1996. Development of Strawberry Harvesting Robot. Proceeding of the Fifty-fifth JSAM Annual Meeting: hal.243 – 244. Kobe, Japan. Japanese Society of Agricultural Machinery.
Wardhana, A. 2001. Desain dan Pengujian End-effector Robot Pemenen Cabai Merah. Skripsi. Jurusan Teknik Pertanian, IPB, Bogor.
Jurnal Keteknikan Pertanian merupakan media publikasi untuk tulisan asli yang belum
pernah diterbitkan di dalam jurnal ilmiah nasional
maupun internasional, dan berkaitan dengan teknik pertanian(agricultural engineering) secara luas. 1. Pedoman Umum
Naskah termasuk Abstract diketik menggunakan program Microsoft Word huruf Times New Roman 12 point (font 12), ukuran kertas A4 (21x29.5cm). Pias 3 cm, spasi 1.5, maksimum 15 halaman termasuk tabel dan gambar s erta diberi nomor halaman pada sudut bawah sebelah kanan. Tabel dan gambar diletakkan pada akhir naskah atau pada lembar dan file terpisah. Pengiriman naskah bisa melalui pos berupa CD berisi file softcopy ataupun
melalui e-mail. Bila dikirim melalui pos, ditujukan ke
alamat:
Redaksi Jurnal Keteknikan Pertanian Departemen Teknik Mesin dan Biosistem, Fakultas Teknologi Pertanian, IPB. Kampus IPB Dramaga, Bogor 16690. E-mail: [email protected] atau
2. Susunan Naskah
Naskah disusun dalam urutan Judul, Penulis dan alamat instansinya, Abstract, Pendahuluan, Bahan dan Metode, Hasil dan Pembahasan, Kesimpulan, Ucapan Terima Kasih, Daftar Pustaka, Tabel dan Gambar. Naskah undangan tidak harus mempunyai susunan seperti tersebut di atas.
3. Judul
Judul memberikan subyek penelitian dengan ringkas dan dicetak tebal (bold) dengan huruf kapital pada setiap awal kata, kecuali untuk kata depan dan kata sambung. Untuk naskah dalam Bahasa
Indonesia harus disertai judul dalam Bahasa Inggris
yang dicetak miring (italic). Judul dalam Bahasa Indonesia tidak lebih dari 14 kata dan dalam Bahasa Inggris tidak lebih dari 10 kata. Nama
lengkap, nama lembaga afiliasi serta alamat para
penulis, ditulis secara berurutan di bawah Judul. Tambahkan alamat email pada nama penulis untuk korespondensi.
Contoh Penulisan Judul:
Pemodelan Sistem Filtrasi
Terkendali pada Sistem
Resirkulasi Pembenihan Ikan
Modeling Controlled Filtration System in Fish Hatchery Recirculation System
Alfin Najwan, Departemen Teknik Mesin dan
Biosistem, Institut Pertanian Bogor, Email:
Ikhlasul Amal, Departemen Budidaya Perairan, Institut Pertanian Bogor.
4. Abstract dan Kata Kunci
Abstract menggambarkan esensi isi keseluruhan tulisan dan di dalamnya tidak terdapat kutipan pustaka. Abstract ditulis dalam bahasa Inggris dan dalam satu paragraf tidak lebih dari 200 kata. Kata kunci ditulis setelah Abstarct maksimum 5 kata, masing-masing dalam bahasa Inggris dan Indonesia. Kata kunci yang ditulis pertama merupakan kata kunci yang terpenting.
5. Naskah Utama
Penulisan sub judul utama (Pendahuluan, Bahan
dan Metode, Hasil dan Pembahasan, Kesimpulan dan Ucapan Terima Kasih) menggunakan huruf kapital pada setiap awal kata, tanpa nomor, dicetak tebal dan posisi di tengah.
Pendahuluan menjelaskan alasan mengapa
penelitian dilakukan, perumusan dan pemecahan masalah, status ilmiah (state of the art)
penelitian-penelitian terdahulu serta tujuan dan hasil penelitian-penelitian
yang diharapkan.
Bahan dan Metode menjelaskan bagaimana
penelitian dilakukan atau cara-cara untuk mencapai
tujuan penelitian.
Hasil dan Pembahasan mencantumkan data yang diperoleh, analisis data, temuan-temuan yang
spesifik serta perbandingannya dengan
penelitian-penelitian terdahulu secara berurutan sesuai
dengan urutan dalam tujuan. Hindari penyajian
tabel dan gambar dari data yang sama.
Sub-sub judul ditulis dengan huruf kapital pada
setiap awal kata, tanpa nomor, dicetak tebal dan posisi di sebelah kiri.
Kata/kalimat dalam bahasa asing ditulis miring.
Nama organisma harus diikuti dengan nama ilmiahnya secara lengkap pada pengungkapan
PEDOMAN PENULISAN
pertama. Singkatan pertama kali ditulis di dalam kurung setelah kata-kata yang disingkatnya. Penulisan angka mengggunakan US System
seperti: 1,000,000 menyatakan satu juta dan 2.5
menyatakan dua lima per sepuluh. Sistem satuan yang digunakan adalah SI Unit: cgs (centimeter, gram,
second/detik). Simbol/notasi ditulis menggunakan
huruf miring dan disertai keterangannya pada pengungkapan pertama. Persamaan diberi nomor urut yang dituliskan di belakang persamaan dan di dalam tanda kurung.
6. Tabel dan Gambar
Tabel ditulis dalam halaman terpisah setelah halaman terakhir dari naskah. Di dalam naskah
cantumkan nomor dan judul tabel pada paragraf
dimana tabel tersebut akan ditempatkan. Contoh pada naskah:
…...Sifat fisik bahan pada masing-masing kadar air ditunjukkan pada Tabel 1.
[Tabel 1. Berat jenis lada berdasarkan kadar air]
Contoh pada halaman tabel:
Tabel 1. Berat jenis lada berdasarkan kadar air
Gambar dibuat hitam putih (B/W) atau greyscale
dalam lembaran terpisah pada halaman terakhir setelah halaman tabel. Apabila ukurannya besar, gambar dapat disimpan dalam file terpisah yang lain(*.jpg, *.gif,*.wmf atau *.emf). Di dalam naskah
cantumkan nomor dan nama gambar pada paragraf dimana gambar tersebut akan diletakkan.
Contoh pada naskah:
…..(paragraf sebelumnya)
[Gambar 1. Perubahan suhu dengan waktu proses pengendalian]
…..(paragraf sesudahnya)
7. Daftar Pustaka
Daftar pustaka mencantumkan pustaka-pustaka
bermutu (primer, mutakhir dan relevan) yang dirujuk saja. Pustaka diketik berdasarkan urutan alfabet
dari nama akhir (nama keluarga) penulis pertama dan tahun. Apabila terdapat beberapa pustaka yang ditulis yang sama, tambahkan huruf ‘a’,’b’ dan seterusnya di belakang tahun. Pustaka dari internet hanya boleh dilakukan bila berasal dari lembaga yang resmi.
Berikut beberapa contoh penulisan pustaka : Jurnal :
Suhardiyanto, H., M.M. Fuad dan Y.
Widiningrum.2007. Analisis pindah panas
pada pendinginan dalam tanah untuk sistem hidroponik. Jurnal Keteknikan Pertanian Vol.21 (4):355-362.
Prosiding :
Fukuda, T.,Y. Nakano, Kuroda, S. Takeuchi, B.I.Setiawan, A. Sapei and F. Nurrochmad.2001.
Water manajemen and water quality of paddyarea
in Cidanau watershed at West Java. Proceedings of the 1st Seminar: Toward Harmonization
between Development and Environmental Conservation in Biological Production, Tokyo, February 21-23, 2001. p 201-205.
Buku :
Morga, R.P.C.1996. Soil Erosion and Conservation. 2ndEd. Longman. Harlow
Bab dalam buku :
Howell, T.A., F.K. Alijiburi, H.M. Gitlin, I. Pai Wu,
A.W.Warrick dan P.A.C. Raats. 1980. Design and operation of trickle (drip) irrigation, in Jensen, M.E.(Ed.). Design and Operation of Farm Irrigation System. ASAE. Michigan. p
663-717.
Skripsi/Tesisi/Disertasi :
Arifanto, T. 2002. Teknik perbaikan filter fisik dan filter
kimia pada sistem resirkulasi pembenihan ikan patin. (Skripsi). Departemen Teknik Pertanian Fakultas Teknologi Pertanian, IPB. Bogor.
FORMULIR PEMESANAN JURNAL KETEKNIKAN PERTANIAN
1Kep
ada Yth.Sekertariat Jurnal Keteknikan Pertanian, Departemen Teknik Mesin dan Biosistem Fakultas Teknologi Pertanian
Institut Pertanian Bogor
Kampus IPB Darmaga, Bogor 16680
Tel: 0251-8624691 ; Fax: 0251-8623026
Email: [email protected] & [email protected]; Website: http://web.ipb.ac.id/~jtep/
Bersama ini, saya Nama
Alamat Telp. HP Email
1. Memesan Jurnal Keteknikan Pertanian: (Harga Rp 50.000,- per eksemplar, belum termasuk ongkos
kemas dan kirim)
Vol/No/Tahun
Jumlah
2. Memesan re-prints Jurnal Keteknikan Pertanian: (Harga Per set (10 eksemplar) Rp 100.000,- belum
termasuk ongkos kemas dan kirim)
Judul
Penulis
Vol/No/Tahun
Jumlah
3. Berlangganan Jurnal Keteknikan Pertanian: (Harga Rp 90.000,- belum termasuk ongkos kemas dan
kirim) Mulai Tahun Sampai Tahun Jumlah
Pembayaran kami lakukan melalui wesel pos ke alamat redaksi/transfer, ke Rekening No.0595-01003461-50-9, BRI KPC IPB, a/n Jurnal Keteknikan Pertanian2. Bersama ini disampaikan bukti pembayarannya3.
Pemesan,
[ ]
1 Formulir pemesanan ini dapat di-download di http://web.ipb.ac.id/`jtep/ 2 Coret yang salah satu