BAB II
TINJAUAN PUSTAKA
2.1 Motor Induksi
Motor induksi merupakan motor arus bolak-balik (AC) yang paling luas
digunakan dan dapat dijumpai dalam setiap aplikasi industri maupun rumah
tangga. Penamaannya berasal dari kenyataan bahwa arus rotor motor ini bukan
diperoleh dari sumber tertentu, tetapi merupakan arus yang terinduksi sebagai
akibat adanya perbedaan relatif antara putaran rotor dengan medan putar (rotating
magnetic field) yang dihasilkan arus stator.
Motor ini memiliki konstruksi yang kuat, sederhana, handal, serta berbiaya
murah. Di samping itu motor ini juga memiliki effisiensi yang tinggi saat
berbeban penuh dan tidak membutuhkan perawatan yang banyak. Akan tetapi jika
dibandingkan dengan motor DC, motor induksi masih memiliki kelemahan dalam
hal pengaturan kecepatan. Dimana pada motor induksi pengaturan kecepatan
sangat sukar untuk dilakukan, sementara pada motor DC hal yang sama tidak
dijumpai.
2.2Konstruksi Motor Induksi
Motor induksi pada dasarnya memiliki konstruksi stator yang samadengan
motor sinkron, dan hanya terdapat perbedaan pada konstuksi rotor. Statordibentuk
dari laminasi - laminasi tipis yang terbuat dari aluminium ataupun besituang,dan
kemudiandipasak bersama -samauntukmembentukintistatordenganslotsepertiyang
yangterisolasiinikemudiandisisipkankedalam slot - slottersebut.
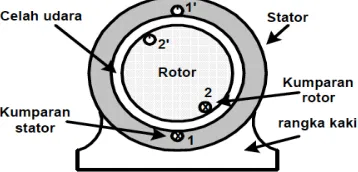
Motor induksi pada dasarnya mempunyai 3 bagian penting seperti yang
diperlihatkan pada Gambar 2.1 sebagai berikut:
1. Stator : Merupakan bagian yang diam dan mempunyai kumparan yang dapat
menginduksikan medan elektromagnetik kepada kumparan rotornya.
2. Celah : Merupakan celah udara: Tempat berpindahnya energi dari startor ke
rotor.
3. Rotor : Merupakan bagian yang bergerak akibat adanya induksi magnet dari
kumparan stator yang diinduksikan kepada kumparan rotor.
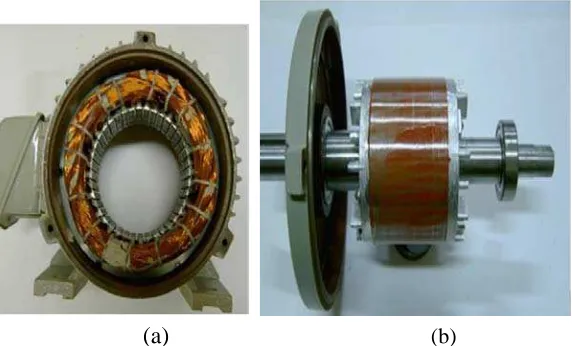
(a) (b)
Gambar 2.1 (a) Stator dan Rotor Sangkar dan (b) Rotor Belitan
Konstruksi stator motor induksi pada dasarnya terdiri dari bagian-bagian
sebagai berikut:
• Rumah stator (rangka stator) dari besi tuang. • Inti stator dari besi lunak atau baja silikon.
• Alur, bahannya sama dengan inti, dimana alur ini merupakan tempat
meletakkan belitan (kumparan stator).
Rangka stator motor induksi ini didesain dengan baik dengan empat tujuan yaitu:
1. Menutupi inti dan kumparannya.
2. Melindungi bagian-bagian mesin yang bergerak dari kontak langsung dengan
manusia dan dari goresan yang disebabkan oleh gangguan objek atau gangguan
udara terbuka (cuaca luar).
3. Menyalurkan torsi ke bagian peralatan pendukung mesin dan oleh karena itu
stator didesain untuk tahan terhadap gaya putar dan goncangan.
4. Berguna sebagai sarana rumahan ventilasi udara sehingga pendinginan lebih
efektif.
Berdasarkan bentuk konstruksi rotornya, maka motor induksi dapat dibagi
menjadi dua jenis seperti yang diperlihatkan pada gambar 2.1, yaitu:
1. Motor induksi dengan rotor sangkar (squirrel cage)
2. Motor induksi dengan rotor belitan (wound rotor)
Konstruksi rotor motor induksi terdiri dari bagian-bagian sebagai berikut:
(a) Inti rotor, bahannya dari besi lunak atau baja silikon sama dengan inti
stator
(b) Alur, bahannya dari besi lunak atau baja silikon sama dengan inti. Alur
merupakan tempat meletakkan belitan (kumparan) rotor
(c) Belitan rotor, bahannya dari tembaga
Gambar 2.2 Gambaran Sederhana Bentuk Alur/ Slot Motor Induksi
Diantara stator dan rotor terdapat celah udara yang merupakan ruangan
antara stator dan rotor.Pada celah udara ini lewat fluks induksi stator yang
memotong kumparan rotor sehingga meyebabkan rotor berputar. Celah udara
yang terdapat antara stator dan rotor diatur sedemikian rupa sehingga didapatkan
hasil kerja motor yang optimum. Bila celah udara antara stator dan rotor terlalu
besar akan mengakibatkan efisiensi motor induksi rendah, sebaliknya bila jarak
antara celah terlalu kecil/sempit akan menimbulkan kesukaran mekanis pada
mesin. Bentuk gambaran sederhana bentuk alur/ slot pada motor induksi
diperlihatkan pada Gambar 2.2 dan gambaran sederhana penempatan stator dan
rotor pada motor induksi diperlihatkan pada Gambar 2.3.
Gambar 2.3 GambarMotor Induksi dengan 1 Kumparan Statordan 1 Kumparan Rotor. Tanda silang (x) pada kumparan stator atau rotor pada Gambar 2.3
menunjukkan arah arus yang melewati kumparan masuk ke dalam kertas (tulisan
(a) (b) Gambar 2.4 (a) Penampang inti stator, (b) Rotor motor induksi
Rotor motor induksi lima phasa dapat dibedakan menjadi dua jenis
yaiturotor
sangkar(squirrelcagerotor)danrotorbelitan(woundrotor).Rotorsangkarterdiri dari
susunan batang konduktor yang dibentangkan ke dalam slot - slot yangterdapat
pada permukaan rotor dan tiap - tiap ujungnya dihubung singkatdengan
menggunakan shortingrings.
Pada motor jenis rotor sangkar, konstruksi pada motor tiga phasa dan
lima phasa adalah hampir sama terutama pada rotornya. Hal paling utama yang
membedakan kedua motor ini adalah belitan konduktor pada statornya, dimana
belitan stator pada motor induksi lima phasa menggunakan 30 slot dan
menggunakan 4 kutub (pole).
2.3 Prinsip Kerja Motor Induksi
Ketika medan magnetik memotong konduktor rotor, di dalam konduktor
tersebut akan diinduksikan ggl yang sama seperti ggl yang diinduksikan dalam
rangkaian tertutup, baik melalui cincin ujung maupun tahanan luar.Ggl induksi
menyebabkan arus mengalir di dalam konduktor rotor. Sehingga dengan adanya
aliran arus pada konduktor rotor di dalam medan magnet yang dihasilkan stator,
maka akan dibangkitkan gaya ( F ) yang bekerja pada motor.
Untuk memperjelas prinsip kerja motor induksi lima phasa, maka dapat
dijabarkan dalam beberapa langkah berikut:
1. Pada keadaan beban nol kelima phasa stator yang terhubung dengan sumber
tegangan lima phasa yang seimbang akan menghasilkan arus pada tiapbelitan
phasa. arus pada tiap phasa menghasilkan fluksi bolak – balik yang berubah
-ubah.
2. Amplitudo fluksi yang dihasilkan berubah secara sinusoidal dan
arahnyategak lurus terhadap belitanphasa.
3. Akibat fluksi yang berputar timbul ggl pada stator motor yang besarnya :
� = −���
�� (����) (2.1)
4. Resultan dari kelima fluksi bolak – balik tersebut menghasilkan medanputar
yang bergerak dengan kecepatan sinkron ns yang besarnya ditentukanoleh
jumlah kutub p dan frekuensi stator f yang dirumuskan:
�� =120��(���) (2.2)
Dimana:
ns = kecepatan sinkron/medan putar (rpm)
f = frekuensi sumber daya (Hz) P = jumlah kutub motor induksi
Akibatnya pada kumparan rotor timbul tegangan induksi sebesar E2.
6. Karena kumparan rotor merupakan rangkaian tertutup, maka ggl
tersebutakan menghasilkan arusI2.
7. Adanya arus I2di dalam medan magnet akan menimbulkan gaya Lorentz (F) pada rotor. Gaya Lorentz yaitu bila suatu konduktor yang dialiri arus berada
dalam suatu kawasan medan magnet, maka konduktor tersebut akan
mendapat gaya elektromagnetik (gaya lorentz) sebesar:
�= ��� sin� (2.3)
8. Bila kopel mula yang dihasilkan oleh gaya F cukup besar untukmemikul
kopel beban, rotor akan berputar searah dengan medan putarstator.
9. Perputaran rotor akan semakin meningkat hingga mendekatikecepatan
sinkron. Perbedaan kecepatan medan putar stator (ns) dengan kecepatanrotor
(nr) disebut slip (s) dan dinyatakan dengan:
� =��− ��
�� � 100% (2.4)
10. Padasaatrotordalamkeadaanberputar,besarnyateganganyangterinduksi pada
11. Bilans = nr, tegangan tidak akan terinduksi dan arus tidak akan
mengalirpada kumparan rotor, sehingga tidak akan dihasilkan kopel. Kopel
akandihasilkan jika nr<ns.
2.4Motor Induksi Lima Phasa
Pada umumnya sumber tegangan yang digunakan untuk menyuplai motor
listrik baik di Indonesia, maupun negara lain merupakan sumber tegangan tiga
fasa. Namun, motor induksi lima fasa membutuhkan suplai yang berbeda, yakni
sumber tegangan lima fasa. Akan tetapi, sumber tegangan lima fasa belum banyak
dijumpai hingga saat ini. Sumber lima fasa ini sedikit berbeda dari tiga fasa.
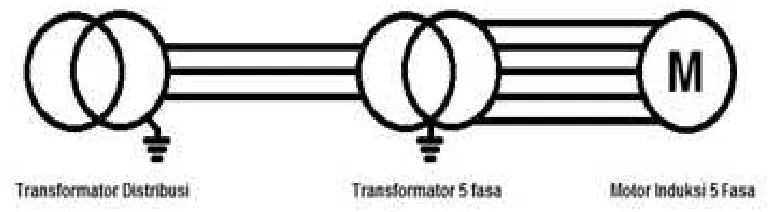
Dimana motor di suplai dari trafo yang mengubah suplai tiga phasa menjadi lima
phasa, seperti yang di tunjukkan pada Gambar 2.5 berikut ini.
Gambar 2.5 One line diagram suplai motor induksi lima phasa
Trafo terdiri dari 3 (tiga) besi dalam menghubungkan belitan - belitan
primer ( 3 phasa) dengan belitan – belitan sekunder ( 5 phasa ). Setiap inti
menghubungkan 1 belitan primer dengan 3 belitan sekunder, kecuali 1 inti lagi
Gambar 2.6 Susunan belitan wye – wye transformasi 5 phasa.
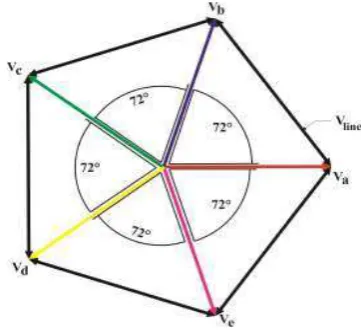
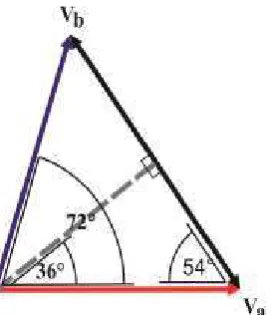
Berikut ini adalah gambar dari fasor diagram tegangan phasa ke phasa
sistem lima phasa:
Gambar 2.7 Fasor diagram tegangan fasa ke fasa sistem lima phasa
Tegangan netral (VN) adalah pengukuran tegangan dari titik netral menuju
titik ujung tiap phasa, sedangkan tegangan phasa ke phasa (VLINE) adalah
mencari VLINE , kita dapat menghitungnya dengan menyederhanakan gambar
2.7 ke gambar dibawah ini :
Gambar 2.8 Analisis tegangan line pada sistem lima phasa
Dari Gambar 2.8 dapat diketahui besar nilai tegangan phasa ke phasa
dengan menggunakan rumus phytagoras (c2 = a2 + b2), sehingga dapat kita cari: VLINE= (Vnetral x cosθ)
VLINE= Vnetral x cos54o
Karena memiliki dua bangun segitiga siku-siku maka:
VLINE= (Vnetral xcos54o) x 2
VLINE= Vnetral x0,587 x 2
VLINE= 1,175.Vnetral
Bila tegangan Vnetral sebesar 220 Volt, maka diperoleh VLINE = 258,62
Volt,Maka dapat disimpulkan bahwa :
Pada saat VAN = VBN = VCN = VDN = VEN dan terpisah sebesar 720 listrik, maka sistem tegangan akan seimbang. Saat VL-L menjadi tegangan antar fasa dan
VL-N = VAN = VBN = VCN = VDN = VENadalah tegangan fasa netral, maka:
��−� =√1,38 ��−�(2.5)
atau
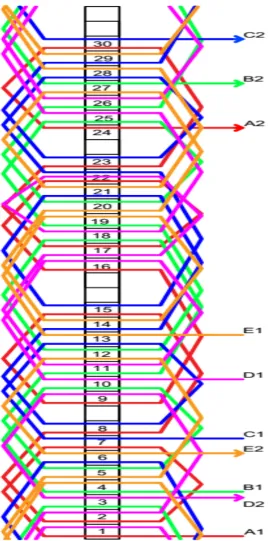
Motor induksi lima phasa dalam Tugas akhir ini dirancang dengan jumlah
30 slot, dan jumlah kutub adalah 4 dengan belitan yang asimetris agar dapat
bekerja dengan stabil, dapat dilihat pada Gambar 2.9
2.5 Aliran Daya Pada Motor Induksi Lima phasa
Daya listrik disuplai ke stator motor induksi diubah menjadi daya mekanik
pada poros motor. Berbagai rugi-rugi yang timbul selama proses konversi energi
listrik antara lain:
1. Rugi-rugi tetap (fixed losses), terdiri dari:
a. Rugi-rugi inti stator
b. Rugi rugi inti rotor
c. Rugi-rugi gesek dan angin
2. Rugi-rugi variabel, terdiri dari:
a. Rugi-rugi tembaga stator (PSCL)
PSCL= 5I12R1 (2.7)
b. Rugi-rugi tembaga rotor (PRCL)
Apabila rugi – rugi tembaga dan rugi – rugi inti dikurangi dengan daya
input motor, maka akan diperoleh besarnya nilai daya celah udara (PAG). Daya
celah udara ini dapat juga disebut sebagai daya output stator atau daya input rotor.
Daya pada celah udara (PAG) dapat dirumuskan dengan :
PAG= Pin - PSCL – PCORE(2.8)
Sementara itu, daya mekanik yang dibangkitkan pada motor induksi
merupakan selisih dari daya pada celah udara dikurangi dengan rugi inti stator dan
rugi gesek dan angin, rumus daya input pada motor induksi lima phasa tersebut
adalah sebagai berikut :
Perbandingan antara supply tiga phasa dengan sistem lima phasa adalah
sebagaiberikut:
P3Ø = √3 VL IL Cos Ø (2.11)
P5Ø = 4.255 VL IL Cos Ø (2.12)
Perbandingan lima phasa dengan tiga phasa = 4.255
1.73 = 2.46
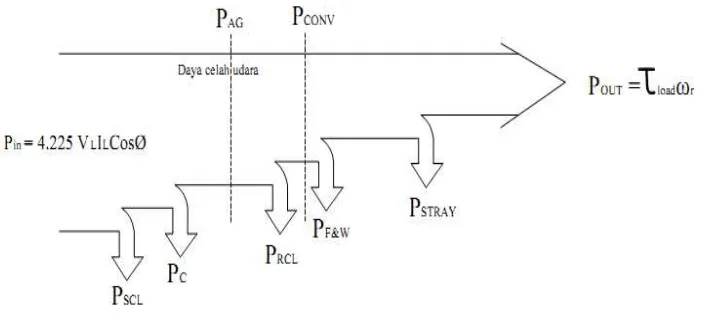
Maka, Daya lima phasa lebih besar 2.46 kali daya tiga phasa. Gambar 2.9
menunjukkan aliran daya pada motor induksi lima phasa.
Dimana :
• PSCL = Rugi-rugi tembaga pada belitan stator (Watt)
• PC = Rugi-rugi inti pada stator (Watt)
• PAG = Daya yang ditransfer melalui celah udara (Watt)
• PRCL = Rugi-rugi tembaga pada kumparan rotor (Watt)
• PF+W = Rugi-rugi gesek + angin (Watt)
• PCONV = Daya mekanis keluaran = Daya output kotor (Watt)
2.6 Torsi Motor Induksi
Kita tahu bahwa Torsi merupakan gaya yang digunakan untuk memikul
beban.Dari diagram aliran daya motor induksi lima phasa sebelumnya dapat
diturunkan suatu rumusan umum untuk torsi motor induksi sebagai fungsi dari
kecepatan. Torsi motor induksi diberikan persamaan sebagai berikut :
Persamaan yang terakhir diatas sangat berguna, karena kecepatan sinkron
selalu bernilai konstan untuk tiap-tiap frekuensi dan jumlah kutup yang diberikan
motor. Karena kecepatan sinkron selalu tetap, maka daya pada celah udara akan
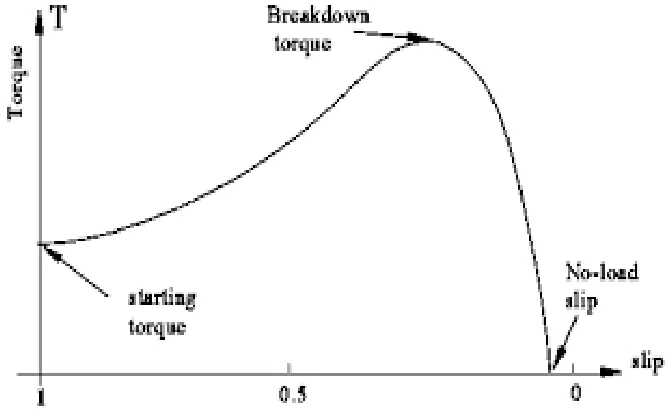
menentukan besar torsi induksi pada motor. Gambar kurva torsi kecepatan (slip)
pada motor induksi ditunjukkan pada gambar 2.11
Gambar 2.11Karateristik torsi – slip pada motor induksi
Dari kurva karateristik torsi motor induksi diatas dapat diambil beberapa
kesimpulan sebagai berikut:
1. Torsi motor induksiakan bernilai nol pada saat kecepatan sinkron.
2. Kurva torsi – kecepatan mendekati linear diantara beban nol dan beban penuh.
Dalam daerah ini, tahanan rotor jauh lebih besar dari reaktansi rotor, oleh
karena itu arus rotor,medan magnet rotor, dan torsi induksi meningkat secara
linear dengan peningkatan slip.
3. Akan terdapat torsi maksimum yang tak mungkin akan dapat dilampaui. Torsi
ini disebut juga pull – out torque atau break down tourque, yang besarnya 2 -3
4. Torsi start pada motor sedikit lebih besar dari pada torsi beban penuhnya, oleh
karena itu motor ini akan start dengan suatu beban tertentu yang dapat
disupplai pada daya penuh.
5. Torsi pada motor akan memberikan harga slip yang bervariasi sebagai harga
kuadrat dari tegangan yang diberikan. Hal ini sangat penting dalam membentuk
pengaturan kecepatan dari motor.
6. Jika rotor motor induksi digerakkan lebih cepat dari kecepatan sinkron,
kemudian arah dari torsi induksi didalam mesin menjadi terbalik dan mesin
akan bekerja sebagai generator, yang mengkonversikan daya mekanik menjadi
daya elektrik.
7. Jika motor induksi bergerak mundur relatif dari arah medan magnet, torsi
induksi mesin akan menghentikan mesin dengan sangat cepat dan akan
mencoba untuk berputar pada arah yang lain. Karena pembalikan arah medan
putar merupakan suatu aksi penyakklaran dua buah phasa stator, maka cara
seperti ini dapat digunakan sebagai suatu cara yang sangat cepat untuk
menghentikan motor induksi. Cara menghentikan motor seperti ini disebut juga
dengan pluging.
2.7Efisiensi Motor Induksi Lima Phasa
Efisiensi dari suatu motor induksi didefinisikan sebagai ukuran keeffektifan motor
induksi untuk mengubah energi listrik menjadi energi mekanik yang dinyatakan
sebagai perbandingan / rasio daya output (keluaran) dengan daya input
Dari persamaan di atas dapat dilihat bahwa efisiensi motor tergantung
pada besarnya rugi-rugi. Pada dasarnya metode yang digunakan untuk
menentukan efisiensi motor induksi bergantung pada dua hal apakah motor itu
dapat dibebani secara penuh atau pembebanan simulasi yang harus digunakan.
Efisiensi dari motor induksi dapat diperoleh dengan melakukan pengujian
beban nol dan pengujian hubung singkat. Dari pengujian beban nol akan diperoleh
rugi-rugi rotasi yang terdiri dari rugi-rugi mekanik dan rugi-rugi inti. Rugi-rugi
tembaga stator tidak dapat diabaikan sekalipun motor berbeban ringan ataupun
tanpa beban. Persamaan yang dapat digunakan untuk motor lima phasa ini adalah:
Prot = 5VphIphcosØ – 5I12R1 (2.17)
Dari ke dua rumus diatas dapat dinyatakan bahwa rugi-rugi daya sama
dengan total daya input rugi tembaga stator. Situasi ini tepat karena rotor tidak
dibebani sewaktu sedang beroperasi sehingga slipnya sangat kecil oleh karena itu
arus, dan rugi-rugi tembaga rotor diabaikan.
2.8Tegangan Tidak Seimbang
Dalam sistem lima phasa yang seimbang,tegangan line to netral
memiliki magnitude yang sama dan tiap - tiap sudut phasanya berbeda 72 derajat
satu sama lain. Apabila terdapat tegangan lima phasa yang magnitudnya tidak
sama dan sudut fasanya mengalami pergeseran sehingga tidak berbeda 72 derajat
satu sama lain, maka dikatakan sistem tersebut memiliki tegangan tidak seimbang.
Penyebab tegangan tidak seimbang termasuk impedansi saluran
transmisi dan saluran distribusi yang tidak sama, distribusi beban - beban satu
Menurut NEMA standard MG1. 1993 [6] dan IEEE defenisi ketidakseimbangan
itu adalah :
����������������= ���− ���
��� � 100 % (2.18)
Dimana :
VLL= tegangan line-line yang tertinggi
Vll = tegangan rata-rata dari tegangan line
Sesuai dengan rumusan yang telah diberikan, dapat dilihat bahwa
definisi tegangan tidak seimbang yang diberikan NEMA menghindari penakaian
aljabar kompleks, sehingga kedua rumusan tersebut akan memberikan hasil yang
berbeda.
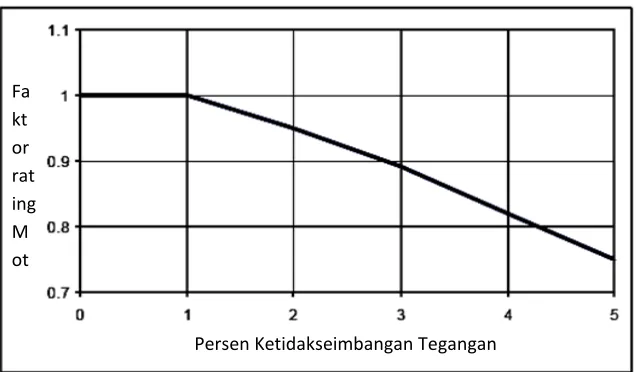
Tegangan tidak setimbang dalam persentase yang kecil akan menghasilkan
arus tidak seimbang dalam jumlah besar, yang mana hal ini akan menimbulkan
kenaikan temperatur pada motor. Jika tegangan yang tidak seimbangmenyuplai
motor induksi, maka daya kuda nominal dari motor harus dikalikan dengan suatu
faktor seperti yang ditunjukkan Gambar 2.12.
Menurut kurva ini, motor induksi dirancang sedemikian rupa sehingga
mampu menangani ketidak setimbangan tegangan 1%, dan selanjutnya akan
menurun tergantung pada tingkat ketidakseimbangan. Operasi pada motor pada
harga ketidak setimbangan tegangan di atas 5% tidak diizinkan.
2.9Penentuan Parameter Motor Induksi
Data yang diperlukan untuk menghitung performansi dari suatu motor
induksi dapat diperoleh dari hasil pengujian tanpa beban, pengujian rotor tertahan,
dan pengukuran tahanan dc lilitan stator.
2.9.1 Pengujian Tanpa Beban ( No Load Test )
Pengujian tanpa beban pada motor induksi akan memberikan keterangan
berupa besarnya arus magnetisasi dan rugi - rugi tanpa beban. Biasanya pengujian
tersebut dilakukan pada frekuensi yang diizinkan dan dengan tegangan lima phasa
dalam keadaan setimbang yang diberikan pada terminal stator. Pembacaan
diambil pada tegangan yang diizinkan setelah motor bekerja cukup lama, agar
bagian - bagian yang bergerak mengalami pelumasan sebagaimanamestinya. Rugi
- rugi rotasional keseluruhan pada frekuensi dan tegangan yang diizinkan pada
waktu dibebani biasanya dianggap konstan dan sama dengan rugi - rugi tanpa
beban.
Pada keadaan tanpa beban, besarnya arus rotor sangat kecil dan hanya
diperlukan untuk menghasilkan torsi yang cukup untuk mengatasi gesekan.
arus magnetisasinya lebih besar. Besarnya rugi - rugi rotasional PR pada keadaan
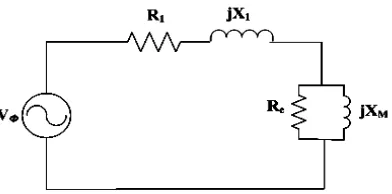
Karena slip pada keadaaan tanpa beban sangat kecil, maka akan
mengakibatkan tahanan rotor R2/s sangat besar. Sehingga cabang paralel rotor dan
cabang magnetisasi menjadi jXM di shunt dengan suatu tahanan yang sangat
besar,dan besarnya reaktansi cabang paralel karenanya sangat mendekati XM.
Sehingga besar reaktansi yang tampak Xnl yang diukur pada terminal stator pada
keadaantanpa beban sangat mendekati X1 + XM, yang merupakan reaktansi sendiri
dari stator, sehingga :
��� =�1+�� (2.20)
Maka besarnya reaktansi diri stator, dapat ditentukan dari pambacaan alat
ukur pada keadaan tanpa beban. Untuk mesin lima phasa yang terhubung Y
besarnya impedansi tanpa beban Znl/ phasa :
��� = ���
�5��� (2.21)
Di mana Vnl merupakan tegangan line, pada pengujian tanpa beban, besarnya
tahanan pada pengujian tanpa beban Rnladalah :
��� = 5����
2��
Pnl merupakan suplai daya lima phasa pada keadaan tanpa beban, maka besar
reaktansi tanpa beban.
��� =�� 2�� − � 2�� (2.23)
sewaktu pengujian beban nol, maka rangkaian ekivalen motor induksi seperti
Gambar 2.13berikut :
Gambar 2.13 Rangkaian ekivalen motor induksi pada percobaan beban nol
2.9.2 Pengujian Tahanan Stator ( DC Test )
Untuk menentukan besarnya tahanan stator R1 dilakukan dengan test DC.
Pada dasarnya tegangan DC diberikan pada belitan stator motor induksi.Karena
arus yang disuplai adalah arus DC, maka tidak terdapat tegangan yang
diinduksikan pada rangkaian rotor sehingga tidak ada arus yang mengalir pada
rotor. Dalam keadaan demikian, reaktansi dari motor juga bernilai nol, oleh
karena itu, yang membatasi arus pada motor hanya tahanan stator.
Untuk melakukan pengujian ini, arus pada belitan stator diatur pada nilai
rated, yang mana hal ini bertujuan untuk memanaskan belitan stator pada
temperatur yang sama selama operasi normal. Apabila tahanan stator dihubung Y,
maka besar tahanan stator/ phasa adalah :
�1 =
���
�1 =
3���
2��� (2.25)
Dengan diketahuinya nilai dari R1, rugi - rugi tembaga stator pada beban
nol dapat ditentukan, dan rugi – rugi rotasional dapat ditentukan sebagai selisih
dari daya input pada beban nol dan rugi - rugi tembaga stator. Gambar
2.14menunjukkan salah satu bentuk pengujian DC pada stator motor induksi yang
terhubung Y.
Gambar 2.14 Rangkaian pengukuran untuk DC test
2.9.3 Pengujian Rotor Tertahan ( Block Rotor Test )
Pengujian ini bertujuan untuk menentukan parameter - parameter motor
induksi, dan biasa juga disebut dengan locked rotor test. Pada pengujian ini rotor
dikunci/ ditahan sehingga tidak berputar.
Untuk melakukan pengujian ini, tegangan AC disuplai ke stator dan arus
yang mengalir diatur mendekati beban penuh. Ketika arus telah menunjukkan nilai
beban penuhnya, maka tegangan, arus, dan daya yang mengalir ke motor diukur.
Saat pengujian ini berlangsung s = 1 dan tahanan rotor R2/s = R2. Karena
nilai R2 dan X2 begitu kecil, maka arus input akan seluruhnya mengalir melalui
tahanan dan reaktansi tersebut. Oleh karena itu, kondisi sirkit pada saat ini terlihat
arus yang mengalir pada motor diatur dengan cepat, sehingga tidak timbul
kenaikan temperatur pada rotor dengan cepat. Daya input yang diberikan kepada
motoradalah :
��� = 4.25���� (2.26)
Dimana :
VT= tegangan line pada saat pengujian berlansung
IL= arus line pada saat pengujian berlangsung
��� = 4.25���
� (2.27)
Dimana :
ZBR= impedansi hubung singkat
��� = ���+����
=���cos�+����sin� (2.28)
Tahanan block rotor :
��� = �1+�2 (2.29)
Sedangkan reaktansi block rotor X’BR = X1’ + X2’
X1’ + X2’ adalah reaktansi stator dan rotor pada frekuensi pengujian
�2 =���− �1 (2.30)
Nilai dari R1 ditentukan dari test DC.Karena reaktansi berbanding
langsung dengan frekuensi, maka reaktansi ekivalen total ( XBR ) pada saat
frekuensi operasi normal
��� =������� ���� ����
′ =�