10 JENIS SENSOR BESERTA CARA
KERJANYA DAN CONTOH APLIKASI
SENSOR TERSEBUT
1. Sensor gerak (PIR)
Sensor gerak atau PIR mempunyai dua bagian utama. Bagian yang pertama pemancar infrared, sedangkan bagian yang kedua yaitu penerima. Bila alat sensor ini ada yang melewatinyan bagian pemancar akan mengirim tanda atau sinyal ke bagian penerima. Selanjutnya, penerima akan memberi perintah pada alat lainnya. Misalnya membuka pintu atau mengeluarkan suara, tergantung system aplikasi yang diterapkan.
Contoh aplikasi :
Pintu yang bisa membuka sendiri secara otomatis Jika ada yang lewat atau masuk maupun keluar. Alat sensor tersebut melakukan deteksi terhadap suatu gerakan yang disebut Namanya adalah PIR (Passive Infrared Sensor)
Bila RTD berada pada suhu kamar maka beda potensial jembatan adalah 0 Volt. Keadaan ini disebut keadaan setimbang. Bila suhu RTD berubah maka resistansinya juga berubahsehingga jembatan tidak dalam kondisi setimbang. Hal ini menyebabkan adanya bedapotensial antara titik A dan B. Begitu juga yang berlaku pada keluaran penguat diferensial.
Contoh Aplikasi :
Pada proses pengontrolan temperatur di line fuel gas (pipa berbahan bakar gas) ini diperlukan pengontrolan (pengendalian) temperatur agar suhu yang ada pada pipa tersebut selalu dalam keadaan stabil sehingga dapat dijadikan bahan bakar kompresor. Uap gas (vapour) yang dihasilkan dari produk drum akan di panaskan di Heat Exchanger sehingga uap gas tersebut dapat dijadikan bahan bakar kompressor. Alat yang digunakan untuk mengontrol temperatur uap gas, merupakan salah satu peralatan atau instrument pabrik. Apabila alat ini tidak beroperasi maka temperatur yang diinginkan tidak akan tercapai sehingga kompressor tidak dapat bekerja dan pabrik tidak dapat beroperasi secara normal dan secara otomatis produksi pabrik pun menjadi berkurang. Untuk itu digunakan instrumen pengukur temperatur yaitu Resistance Temperature Detector (RTD) yang berperan mengawasi dan mengontrol temperatur gas. RTD ini bekerja berdasarkan perbandingan perubahan temperatur dengan besaran tahanan listrik dari logam yang terdapat pada sensor RTD tersebut, dan jenis logam yang sering digunakan adalah platina (Pt100).
3. Sensor Suhu (Thermokopel)
Contoh Aplikasi :
· Industri besi dan baja
· Pengaman pada alat-alat pemanas · Untuk termopile sensor radiasi
· Pembangkit listrik tenaga panas radioisotop, salah satu aplikasi termopile
4. Sensor Suhu (IC IM35)
Tegangan keluaran rangkaian betaambah 10 mV/0C. Dengan memberikan tegangan referensi negtif (-Vs) Dengan memberikan tegangan referensi negatif (-Vs) pada rangkaian, sesor ini mampu bekerja pada rentang suhu -550C – 1500C. Tegangan keluaran dapat diatur 0 V pada suhu 00C dan ketelitian sensor ini adalah ±10C.
Contoh Aplikasi :
Sistem monitoring suhu ruangan pada laboratorium kimia, sistem monitoring suhu
rumah kaca.
Mengubah suhu menjadi resistansi atau hambatan listrik yang berbanding terbalik dengan perubahan suhu. Semakin tinggi suhu, semakin kecil resistansinya.
Contoh Aplikasi :
Aplikasi thermistor pada otomotif adalah pada Sensor IAT (Intake Air Temperature)Sensor ini medeteksi temperatur udara masuk ke engine
dengan mengunakan thermistor.
6. Bimetallic Temperature Sensor
Sensor ini mengubah mampu besaran suhu menjadi gerakan. sensor ini terbuat dari dua buah logam yang disatukan atau direkatkan menjadi satu. Cara kerja dari sensor ini adalah setiap logam kan mempunyai koefsien muai yang berbeda-beda maka jika dua buah logam yang memiliki koefsien muai yang bebeda disatukan maka gabungan kedua logam itu akan melengkung jika dipanasi. Karena sifatnya yang bisa melengkung jika terkena panas maka bimetal ini sering dipakai sebagai saklar suhu otomatis atau sebagai alat ukur suhu yang analog.
Salah satu aplikasi dari Bimetallic temperature sensor ini adalah pada setrikaan listrik pada setrika jika suhu melebihi batas yang telah ditentukan maka setrika akan mati sendiri dan akan ada bunyi "tik", itu sebenarnya adalah Bimetallic temperature sensor yang sedang melengkung. Disini bimetal berfungsi sebagai saklar suhu otomatis yang akan memutus kontak listrik jika suhu setrika melebihi batas yang ditentukan.
7. Sensor Ultrasonic
Sensor ultrasonik bekerja berdasarkan prinsip pantulan gelombang suara, dimana sensor ini menghasilkan gelombang suara yang kemudian menangkapnya kembali dengan perbedaan waktu sebagai dasar penginderaannya. Perbedaan waktu antara gelombang suara dipancarkan dengan ditangkapnya kembali gelombang suara tersebut adalah berbanding lurus dengan jarak atau tinggi objek yang memantulkannya. Jenis objek yang dapat diindera diantaranya adalah: objek padat, cair, butiran maupun tekstil.
Contoh Aplikasi :
Sensor ultrasonic banyak digunakan di berbagai perangkat pengukur jarak. sebagai contoh di dunia robotika sensor ini digunakan sebagai indra utama untuk navigasi robot. sebagai contoh tipe ultra sonic yang banyak digunakan adalah tipe SRF, dan PING pada perinsipnya sensor jarak ultra sonic menggunakan prinsip kerja yang sama, yaitu pngirim sinyal dan penerima sinyal (transmitter and receiver). sensor ini bekerja pada frequency 40 Khz.
Sensor ini adalah saat rangkaian sumber cahaya diberi VCC 5 Volt dan menghasilkan cahaya, cahaya masuk pada photodioda tidak terhalangi maka akan menghasilkan tegangan 5V dan begitu juga sebaliknya saat terhalangi maka akan menghasilkan tegangan 0V. Dimana tegangan menjadi inputan untuk mikrokontroler.
Contoh Aplikasi :
Salah satu aplikasi rotary encoder sebagai sensor posisi digunakan pada Mouse Analog (Mouse yang menggunakan Bola). Kurang lebih Tiga buah Rangkaian Sensor Posisi menggunakan Rotary Encoder.
Sensor Level ini akan menurunkan bandulnya dengan timing tertentu kemudian jika bandul tersebut menyentuh material maka bandul akan naik kembali. Dan Level ketinggian material bisa diketahui dari Panjang bandul yang diturunkan tersebut. Bisa juga diperintahkan dari Pusat Kontrol untuk memberikan Command ke Controller jika ingin melakukan pengukuran material menggunakan SiloPilot ini.
Contoh Aplikasi :
Penggunaan sensor level di pabrik semen biasanya di pasang di bin material, Silo ataupun untuk mengetahui ketinggian/volume tandon air (water treatment). Silo pilot cocok untuk pengukuran level di pabrik semen karena selain cukup handal sensor ini juga baik untuk pengukuran material bulk seperti semen.
Sensor level switch ini cukup sederhana, sensor ini cuman melakukan pensaklaran biasa, apabila material semen kontak dengan sensor sehingga switch tertekan maka kita cukup menghubungkan kaki NO/NC nya dengan tegangan signal baik itu 24 VDC atau 220 VAC, yang kemudian signal kita dapat teruskan ke controller (PLC/DCS).
Contoh Aplikasi :
Sama seperti sensor silo pilot, penggunaan sensor level switch ini biasa di gunakan di pabrik semen. tetapi di bandingkan silo pilot, sensor level switch ini masih kalah.
pengertian aktuator
2.1 Pengertian Aktuator
Aktuator adalah bagian keluaran untuk mengubah energi suplai menjadi energi kerja yang
dimanfaatkan. Sinyal keluaran dikontrol oleh sistem kontrol dan aktuator bertanggungjawab pada sinyal kontrol melalui elemkeonn trol terakhir. Jenis lain dari bagian keluara digunakan untuk mengindikasi status kontrol sistem atau aktuator.
Actuator adalah elemen yang mengkonversikan besaran listrik analog menjadi besaran lainnya misalnya kecepatan putaran dan merupakan perangkat elektromekanik yang menghasilkan daya gerakan sehingga dapat menghasilkan gerakan pada robot. Untuk meningkatkan tenaga mekanik aktuator dapat dipasang sistem gearbox.
Aktuator dapat melakukan hal tertentu setelah mendapat perintah dari kontroler.Misalnya pada suatu robot pencari cahaya, maka jika terdapat cahaya sensor akan memberikan informasi kepada kontroler yang kemudian akan memerintahkan kepada aktuator untuk bergerak mendekati arah cahaya.
Aktuator adalah peranti yang menghasilkan gerakan pada robot. Motor listrik, pneumatika, dan hidrolika adalah contoh dari aktuator. Selain output gerakan, pada suatu robot sering kali
aktuator. Display dapat berupa LED, seven segment, ataupun LCD.
Kontroler adalah peranti yang berfungsi untuk mengolah informasi yang diberikan sensor dan kemudian memberikan perintah kepada aktuator untuk melakukan hal tertentu. Misalnya pada suatu robot pencari cahaya, maka jika terdapat cahaya sensor akan memberikan informasi kepada kontroler yang kemudian akan memerintahkan kepada aktuator untuk bergerak mendekati arah cahaya.
Kebanyakan kontroler yang digunakan pada robot adalah peranti digital yang dapat diprogram (atau secara umum disebut komputer) karena alasan fleksibilitas. Banyak peranti yang dapat dijadikan kontroler robot, seperti PC, mikrokontroler, PLC serta kontroler digital lainnya (misal FPGA), namun yang paling banyak dipakai (terutama untuk mobile robot) adalah mikrokontroler
Fungsi aktuator a. Penghasil gerakan
b. Gerakan rotasi dan translasi c. Mayoritas aktuator > motor based
d. Aktuator dalam simulasi cenderung dibuat linier
e. Aktuator riil cenderung non-linier 2.1 Pengertian Aktuator
Aktuator adalah bagian keluaran untuk mengubah energi suplai menjadi energi kerja yang
dimanfaatkan. Sinyal keluaran dikontrol oleh sistem kontrol dan aktuator bertanggungjawab pada sinyal kontrol melalui elemkeonn trol terakhir. Jenis lain dari bagian keluara digunakan untuk mengindikasi status kontrol sistem atau aktuator.
Actuator adalah elemen yang mengkonversikan besaran listrik analog menjadi besaran lainnya misalnya kecepatan putaran dan merupakan perangkat elektromekanik yang menghasilkan daya gerakan sehingga dapat menghasilkan gerakan pada robot. Untuk meningkatkan tenaga mekanik aktuator dapat dipasang sistem gearbox.
Aktuator dapat melakukan hal tertentu setelah mendapat perintah dari kontroler.Misalnya pada suatu robot pencari cahaya, maka jika terdapat cahaya sensor akan memberikan informasi kepada kontroler yang kemudian akan memerintahkan kepada aktuator untuk bergerak mendekati arah cahaya.
Aktuator adalah peranti yang menghasilkan gerakan pada robot. Motor listrik, pneumatika, dan hidrolika adalah contoh dari aktuator. Selain output gerakan, pada suatu robot sering kali
diperlukan output dalam bentuk lain, misalnya display untuk menampilkan keadaan sensor ataupun aktuator. Display dapat berupa LED, seven segment, ataupun LCD.
Kontroler adalah peranti yang berfungsi untuk mengolah informasi yang diberikan sensor dan kemudian memberikan perintah kepada aktuator untuk melakukan hal tertentu. Misalnya pada suatu robot pencari cahaya, maka jika terdapat cahaya sensor akan memberikan informasi kepada kontroler yang kemudian akan memerintahkan kepada aktuator untuk bergerak mendekati arah cahaya.
Kebanyakan kontroler yang digunakan pada robot adalah peranti digital yang dapat diprogram (atau secara umum disebut komputer) karena alasan fleksibilitas. Banyak peranti yang dapat dijadikan kontroler robot, seperti PC, mikrokontroler, PLC serta kontroler digital lainnya (misal FPGA), namun yang paling banyak dipakai (terutama untuk mobile robot) adalah mikrokontroler
Fungsi aktuator a. Penghasil gerakan
b. Gerakan rotasi dan translasi c. Mayoritas aktuator > motor based
d. Aktuator dalam simulasi cenderung dibuat linier
e. Aktuator riil cenderung non-linier 2.1 Pengertian Aktuator
Aktuator adalah bagian keluaran untuk mengubah energi suplai menjadi energi kerja yang
sinyal kontrol melalui elemkeonn trol terakhir. Jenis lain dari bagian keluara digunakan untuk mengindikasi status kontrol sistem atau aktuator.
Actuator adalah elemen yang mengkonversikan besaran listrik analog menjadi besaran lainnya misalnya kecepatan putaran dan merupakan perangkat elektromekanik yang menghasilkan daya gerakan sehingga dapat menghasilkan gerakan pada robot. Untuk meningkatkan tenaga mekanik aktuator dapat dipasang sistem gearbox.
Aktuator dapat melakukan hal tertentu setelah mendapat perintah dari kontroler.Misalnya pada suatu robot pencari cahaya, maka jika terdapat cahaya sensor akan memberikan informasi kepada kontroler yang kemudian akan memerintahkan kepada aktuator untuk bergerak mendekati arah cahaya.
Aktuator adalah peranti yang menghasilkan gerakan pada robot. Motor listrik, pneumatika, dan hidrolika adalah contoh dari aktuator. Selain output gerakan, pada suatu robot sering kali
diperlukan output dalam bentuk lain, misalnya display untuk menampilkan keadaan sensor ataupun aktuator. Display dapat berupa LED, seven segment, ataupun LCD.
Kontroler adalah peranti yang berfungsi untuk mengolah informasi yang diberikan sensor dan kemudian memberikan perintah kepada aktuator untuk melakukan hal tertentu. Misalnya pada suatu robot pencari cahaya, maka jika terdapat cahaya sensor akan memberikan informasi kepada kontroler yang kemudian akan memerintahkan kepada aktuator untuk bergerak mendekati arah cahaya.
Kebanyakan kontroler yang digunakan pada robot adalah peranti digital yang dapat diprogram (atau secara umum disebut komputer) karena alasan fleksibilitas. Banyak peranti yang dapat dijadikan kontroler robot, seperti PC, mikrokontroler, PLC serta kontroler digital lainnya (misal FPGA), namun yang paling banyak dipakai (terutama untuk mobile robot) adalah mikrokontroler
Fungsi aktuator a. Penghasil gerakan
b. Gerakan rotasi dan translasi c. Mayoritas aktuator > motor based
d. Aktuator dalam simulasi cenderung dibuat linier e. Aktuator riil cenderung non-linier
Aktuator adalah sebuah peralatan mekanis untuk menggerakkan atau mengontrol sebuah mekanisme atau sistem. Aktuator diaktifkan dengan menggunakan lengan mekanis yang biasanya digerakkan oleh motor listrik, yang dikendalikan oleh media pengontrol otomatis yang terprogram di antaranya mikrokontroler. Aktuator adalah elemen yang mengkonversikan besaran listrik analog menjadi besaran lainnya misalnya kecepatan putaran dan merupakan perangkat elektromagnetik yang menghasilkan daya gerakan sehingga dapat menghasilkan gerakan pada robot. Untuk meningkatkan tenaga mekanik aktuator ini dapat dipasang sistem gearbox. Aktuator dapat melakukan hal tertentu setelah mendapat perintah dari kontroller. Misalnya pada suatu robot pencari cahaya, jika terdapat cahaya, maka sensor akan memberikan informasi pada kontroller yang kemudian akan memerintah pada aktuator untuk bergerak mendekati arah sumber cahaya.
Aktuator : Pintu kendali ke sistem
Aktuator : Pengubah sinyal listrik menjadi besaran mekanik
Batasan aktuator riil : Sinyal kemudi terkesil, saturasi.
Fungsi aktuator adalah sebagai berikut.
Penghasil gerakan
Gerakan rotasi dan translasi
Mayoritas aktuator > motor based
Aktuator dalam simulasi cenderung dibuat linier Aktuator riil cenderung non-linier
Jenis tenaga penggerak pada aktuator
Aktuator tenaga elektris, biasanya digunakan solenoid, motor arus searah (Mesin DC). Sifat mudah diatur dengan torsi kecil sampai sedang
Aktuator tenaga hidrolik, torsi yang besar konstruksinya sukar.
Aktuator tenaga pneumatik, sukar dikendalikan.
Aktuator lainnya: piezoelectric, magnetic, ultra sound.
Tipe aktuator elektrik adalah sebagai berikut:
1. Solenoid.
Keunggulan aktuator elektrik adalah sebagai berikut:
1. Mudah dalam pengontrolan
2. Mulai dari mW sampai MW.
3. Berkecepatan tinggi, 1000 – 10.000 rpm.
4. Banyak macamnya.
5. Akurasi tinggi
6. Torsi ideal untuk pergerakan.
Aktuator / Penggerak, dalam pengertian listrik adalah setiap alat yang mengubah sinyal listrik menjadi gerakan mekanis. Biasa digunakan sebagai proses lanjutan dari keluaran suatu proses olah data yang dihasilkan oleh suatu sensor atau kontroler. Pada instrumentasi aktuator sebagai output terakhir sebagai penerus perintah dari controller untuk melakukan tindakan eksekusi/koreksi. Terdiri dari 3 jenis pokok :
Berikut berbagai jenis aktuator sesuai dengan prinsip kerjanya yaitu:
- Aktuator listrik : Aktuator tenaga elektris, biasanya digunakan selenoid, motor arus searah (mesin DC). Sifat mudah diatur dengan torsi kecil sampai sedang.
- Aktuator hidraulik : Aktuator tenaga hidraulik, torsi yang besar konstruksinya sukar - Aktuator pneumatik : Aktuator tenaga pneumatik, sukar dikendalikan
Aktuator Electric
Aktuator elektrik merupakan actuator yang mempunyai prinsip kerja mengubah sinyal elektrik me
njadi gerakan mekanik, Berikut macam-macam actuator elektrik
Solenoid.
Motor stepper.
Motor DC.
Brushless DC-motors.
Motor Induksi.
Motor Sinkron.
Gambar Aktuator Electric
Keunggulan aktuator elektrik adalah sebagai berikut :
Mudah dalam pengontrolan
Mulai dari mW sampai MW.
Berkecepatan tinggi, 1000 – 10.000 rpm.
Akurasi tinggi
Torsi ideal untuk pergerakan.
Efisiensi tinggi.
Aktuator Pneumatic
Aktuator pneumatic adalah aktuator yang memanfaatkan udara bertekanan menjadi gerakan mekanik. Dengan memberikan udara bertekanan pada satu sisi permukaan piston (arah maju) , sedangkan sisi yang lain (arah mundur) terbuka ke atmosfir, ma ka gaya diberikan pada sisi permukaan piston tersebut sehingga batang piston akan terdorong keluar sampai mencapai posisi maksimum dan berhenti.
Gambar Aktuator Pneumatik
Gaya piston yang dihasilkan oleh silinder bergantung pada tekanan udara, diameter silinder dan tahanan gesekan dari komponen perapat. Gaya piston secara teoritis di hitung menurut rumus berikut :
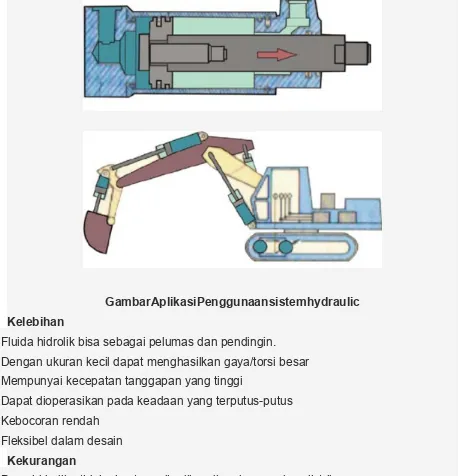
Aktuator Hydraulic
Gambar Aplikasi Penggunaan sistem hydraulic Kelebihan
Fluida hidrolik bisa sebagai pelumas dan pendingin.
Dengan ukuran kecil dapat menghasilkan gaya/torsi besar
Mempunyai kecepatan tanggapan yang tinggi
Dapat dioperasikan pada keadaan yang terputus-putus
Kebocoran rendah
Fleksibel dalam desain Kekurangan
Daya hidrolika tidak siap tersedia dibanding dengan daya listrik
Biaya sistem lebih mahal
Bahaya api dan ledakan ada
Sistem cenderung kotor
Mempunyai karakteristik redaman yang rendah
AKTUATOR
Merupakan alat daya yang menghasilkan masukan ke plant sesuai dengan sinyal kontrol sedemi kiansehingga sinyal umpan balik akan berkaitan denga sinyal masukan acuan.
JENIS JENIS AKTUATOR
Aktuator Electric
Aktuator elektrik merupakan actuator yang mempunyai prinsip kerja mengubah sinyal elektrik me
njadi gerakan mekanik, Berikut macam-macam actuator elektrik
Solenoid.
Motor stepper.
Motor DC.
Brushless DC-motors.
Motor Induksi.
Motor Sinkron.
Keunggulan aktuator elektrik adalah sebagai berikut :
Mudah dalam pengontrolan
Mulai dari mW sampai MW.
Berkecepatan tinggi, 1000 – 10.000 rpm.
Banyak macamnya.
Akurasi tinggi
Torsi ideal untuk pergerakan.
Efisiensi tinggi.
A
ktuator PneumatikAktuator yang menggunakan udara sebagai pemacu geraknya. Sukar di kendalikan. Memiliki
respon yang lebih cepat.
Prinsip pneumatik
Pneumatik menggunakan perbedaan volume udara yang ditekan atau dimampatkan untuk
membangkitkan tekanan pada piston.
Aktuator yang menggunakan fluida dalam bentuk cairan sebagai pemacu geraknya. Torsi yang
besar konstruksinya sukar. Respon agak lambat.
Prinsip hidrolitik
Hidrolitik menggunakan perbedaan volume cairan yang ditekan atau dimampatkan untuk
membangkitkan tekanan pada piston.
Kelebihan
Fluida hidrolik bisa sebagai pelumas dan pendingin.
Dengan ukuran kecil dapat menghasilkan gaya/torsi besar
Mempunyai kecepatan tanggapan yang tinggi
Dapat dioperasikan pada keadaan yang terputus-putus
Kebocoran rendah
Fleksibel dalam desain
Kekurangan
Daya hidrolika tidak siap tersedia dibanding dengan daya listrik
Biaya sistem lebih mahal
Bahaya api dan ledakan ada
Sistem cenderung kotor