PERUBAHAN POLA POSISI AMPHIDROMIE PASANG
SURUT DAN ARUS PASANG SURUT (TIDAL CURRENTS)
DI NORTH SEA DAN PERAIRAN INDONESIA UNTUK
KOMPONEN M
2SKRIPSI
Diajukan untuk Melengkapi Tugas-tugas dan
Memenuhi Syarat-syarat Guna Memperoleh
Gelar Sarjana Sains
Oleh
ICHSAN SETIAWAN
NIM: 96810178
JURUSAN FISIKA
FAKULTAS MATEMATIKA DAN ILMU PENGETAHUAN ALAM
UNIVERSITAS SYIAH KUALA
PENGARUH GESEKAN DASAR LAUT TERHADAP
PERUBAHAN POLA POSISI AMPHIDROMIE PASANG
SURUT DAN ARUS PASANG SURUT (TIDAL CURRENTS)
DI NORTH SEA DAN PERAIRAN INDONESIA UNTUK
KOMPONEN M
2Oleh
Nama
Nim
Jurusan
:
:
:
ICHSAN SETIAWAN
96810178
Fisika
Disetujui,
Pembimbing Utama Pembimbing Pembantu
Dr. Syamsul Rizal Irwandi, S.Si
Nip. 131 662 135 Nip. 132 231 609
Diketahui,
Dekan Fakultas MIPA Ketua Jurusan Fisika
Dr. Syamsul Rizal Zulkarnain A. Djalil, M.Si
Nip. 131 662 135 Nip. 132 090 410
ii
Simulasi perubahan posisi amphidromie yang dilakukan di North Sea dan Perairan Indonesia terdiri dari amphidromie pasang surut dan arus pasang surut (tidal currents) komponen M2. Lokasi titik nol yang dihasilkan ini diperoleh dengan menvariasikan
iii ABSTRACT
Simulation that is conducted on the change of amphidromic position at North Sea and Indonesian waters consists of tides and tidal current of M2. These some zero points
iv
Bismillahirrahmanirrahim.
Alhamdulillah, puji syukur ke hadirat Allah SWT yang telah melimpahkan
rahmat dan hidayah-Nya, sehingga penulis dapat menyelesaikan skripsi ini yang
berjudul ”Pengaruh gesekan dasar laut terhadap perubahan pola posisi amphidromie
pasang surut dan arus pasang surut (tidal currents) di North Sea dan Perairan
Indonesia untuk komponen M2”, yang merupakan tugas dan syarat untuk
menyelesaikan pendidikan S1 pada Fakultas Matematika dan Ilmu Pengetahuan Alam
Universitas Syiah kuala.
Dalam menyelesaikan skripsi ini penulis banyak mendapat bimbingan dan
bantuan dari berbagai pihak. Oleh karena itu, pada kesempatan ini penulis
mengucapkan terima kasih dan penghargaan yang sedalam-dalamnya kepada :
1. Bapak Dr. Syamsul Rizal sebagai Dekan Fakultas MIPA dan Pembimbing Utama.
2. Bapak Irwandi, S.Si sebagai pembimbing pembantu.
3. Bapak Zulkarnain A. Djalil, M.Si sebagai ketua jurusan Fisika.
4. Bapak M. Syukri , M.T sebagai sekretaris jurusan Fisika .
5. Bapak Drs Muhammad, M.Si sebagai pembimbing akademik.
6. Semua staf pengajar dan laboran pada jurusan Fisika.
7. Teman-teman yang telah banyak memberi bantuan dan dorongan moril yang
v
8. Ibunda dan Ayahanda tercinta, serta paman dan adik-adik yang senantiasa berdoa
untuk keberhasilan penulis.
Penulis menyadari sepenuhnya di dalam penulisan skripsi masih banyak
kekurangan-kekurangan baik dari segi teknik penulisan maupun dari segi materi. Hal
ini tidak terlepas dari keterbatasan kemampuan dan ilmu pengetahuan penulis. Untuk
itu kritik dan saran penulis harapkan demi kesempurnaan tulisan ini.
Akhirnya penulis berharap, segala amal baik yang telah telah dilakukan
mendapat keridhaan dari Allah SWT, dan dapat memberi manfaat bagi kita semua.
Amin.
Darussalam, 16 Juli 2000
vi LEMBAR PENGESAHAN ABSTRAK ABSTRACT KATA PENGANTAR DAFTAR ISI DAFTAR SIMBOL DAFTAR GAMBAR DAFTAR LAMPIRAN
BAB I PENDAHULUAN
1.1 Latar Belakang
1.2 Dasar Permasalahan
1.3 Batasan Masalah
1.4 Tujuan Penelitian
1.5 Manfaat Penelitian
BAB II TINJAUAN PUSTAKA
2.1 Persamaan Dinamika Oseanografi
2.2 Dinamika Laut yang Mempengaruhi Titik Amphidromie
2.2.1 Pasang Surut (Tides)
2.2.2 Rotasi Bumi
2.3. Titik Amphidromie dan Gesekan Dasar Laut
2.3.1 Titik Amphidromie
2.3.2 Gesekan Dasar Laut dan Efek Air Dangkal
vii
2.4 Efek Parameter Gesekan terhadap Posisi Amphidromie
2.5 Syarat Batas Nilai Awal
2.6 Kedalaman North Sea
2.7 Perairan Indonesia
2.8 Perhitungan Amplitudo dan Fasa
BAB III METODELOGI PENELITIAN
3.1 Tempat dan Waktu Penelitian
3.2 Perangkat Penelitian
3.3 Prosedur Penelitian
BAB IV HASIL DAN PEMBAHASAN
4.1 Hasil Penelitian
4.2 Analisa Data dan Pembahasan
4.2.1 North Sea
4.2.2 Perairan Indonesia dan Laut Cina Selatan
BAB V KESIMPULAN
viii
A
AH, AV
B C f F,F x/y G r g. H. P(x,y,z,t) U,v,w R t
Amplitudo pasut (m) Fasa ()
Viskositas eddy kinematis arah horizontal dan vertikal m2s-1 Indek pada saat di dasar laut
Koefisien gesek Chézy (m1/2
s-1) Parameter coriolis f = 2sin (s-1) Gaya dan vektor gaya
1/1Δ tγ ,k b b k 1 x/yG Gx, Gy ---> suku gesekan
faktor gesekan dasar laut
parameter gesekan dasar laut (s-1) Percepatan grafitasi (ms-2)
Ketebalan lapisan (m) Tekanan (kg ms-2)
Kecepatan arus arah x,y,z (ms-1) Jari-jari bumi (6371040 m)
Kecepatan sudut rotasi bumi ( 7 29 10, x 5rad/detik) Lintang geografis ()
Selang waktu (s)
Parameter relaksasi dalam iterasi SOR (1,55) Parameter implisit (0.5)
ix DAFTAR GAMBAR Gambar 2-1 Gambar 2-2 Gambar 2-3 Gambar 2-4 Gambar 2-5 Gambar 2-6 Gambar 2-7
Perhitungan komponen kecepatan rotasi bumi terhadap
sudut azimut
Spiral Ekman
Amphidromie pasang surut M2 di North Sea Fischer
(1958)
Efek gesekan
Amphidromie pasang surut M2 dengan berbagai
parameter gesekan () (Rienecker dan Teubner 1980)
Kontur bathimetri North Sea dalam meter (Rizal, 2000)
Kontur bathimetri Perairan Indonesia (Stawarz dan
x Lampiran 1 Lampiran 2 Lampiran 3 Lampiran 4 Lampiran 5 Lampiran 6 Lampiran 7 Lampiran 8 Lampiran 9 FLOW CHART
Amplitudo/Fasa (Amphidromie) pasut M2di North Sea
dengan faktor gesekan r = 0,0016 dan r = 0,0020
Amplitudo/Fasa (Amphidromie) pasut M2di North Sea
dengan faktor gesekan r = 0,0025 dan r = 0,0030
Amplitudo/Fasa (Amphidromie) pasut M2di North Sea
dengan faktor gesekan r = 0,0035
Amplitudo/Fasa (Amphidromie) pasut M2di North Sea
yang dimodelkan oleh (Müller-Navarra dan Mittelstaedt
1987)
Amplitudo/Fasa (Amphidromie) pasut M2 di North Sea
yang dimodelkan oleh (Xia Zongwan, N. Carbajal dan J.
Sündermann 1995)
Amplitudo/Fasa (Amphidromie) arus u dan v (lapisan
atas) komponen M2di North Sea dengan faktor gesekan
r = 0,0016
Amplitudo/Fasa (Amphidromie) arus u dan v (lapisan
atas) komponen M2di North Sea dengan faktor gesekan
r = 0,0020
Amplitudo/Fasa (Amphidromie) arus u dan v (lapisan
atas) komponen M2di North Sea dengan faktor gesekan
r = 0,0025
xi Lampiran 10 Lampiran 11 Lampiran 12 Lampiran 13 Lampiran 14 Lampiran 15 Lampiran 16 Lampiran 17 Lampiran 18 Lampiran 19
Amplitudo/Fasa (Amphidromie) arus u dan v (lapisan
atas) komponen M2di North Sea dengan faktor gesekan
r = 0,0030
Amplitudo/Fasa (Amphidromie) arus u dan v (lapisan
atas) komponen M2di North Sea dengan faktor gesekan
r = 0,0035
Fasa arus u (lapisan atas) komponen M2 di North Sea
yang dimodelkan oleh Davies dan Furnes (1980)
Fasa arus v (lapisan atas) komponen M2 di North Sea
yang dimodelkan oleh Davies dan Furnes (1980)
Amplitudo/Fasa (Amphidromie) arus u dan v (lapisan
bawah) komponen M2 di North Sea dengan faktor
gesekan r = 0,0016
Amplitudo/Fasa (Amphidromie) arus u dan v (lapisan
bawah) komponen M2 di North Sea dengan faktor
gesekan r = 0,0020
Amplitudo/Fasa (Amphidromie) arus u dan v (lapisan
bawah) komponen M2 di North Sea dengan faktor
gesekan r = 0,0025
Amplitudo/Fasa (Amphidromie) arus u dan v (lapisan
bawah) komponen M2 di North Sea dengan faktor
gesekan r = 0,0030
Amplitudo/Fasa (Amphidromie) arus u dan v (lapisan
bawah) komponen M2 di North Sea dengan faktor
gesekan r = 0,0035
Fasa arus u (lapisan bawah) komponen M2 di North Sea
yang dimodelkan oleh Davies dan Furnes (1980)
xii Lampiran 21 Lampiran 22 Lampiran 23 Lampiran 24 Lampiran 25 Lampiran 26 Lampiran 27 Lampiran 28 Lampiran 29
yang dimodelkan oleh Davies dan Furnes (1980)
Amplitudo arus maksimum (lapisan Atas) komponen M2
di North Sea dengan faktor gesekan r = 0,0016 dan r =
0,0020
Amplitudo arus maksimum (lapisan Atas) komponen M2
di North Sea dengan faktor gesekan r = 0,0025 dan r =
0,0030
Amplitudo arus maksimum (lapisan Atas) komponen M2
di North Sea dengan faktor gesekan r = 0,0035
Fasa arus maksimum (lapisan Atas) komponen M2 di
North Sea dengan faktor gesekan r = 0,0016 dan r =
0,0020
Fasa arus maksimum (lapisan Atas) komponen M2 di
North Sea dengan faktor gesekan r = 0,0025 dan r =
0,0030
Fasa arus maksimum (lapisan Atas) komponen M2 di
North Sea dengan faktor gesekan r = 0,0035
Amplitudo arus maksimum (lapisan Bawah) komponen
M2di North Sea dengan faktor gesekan r = 0,0016 dan r
= 0,0020
Amplitudo arus maksimum (lapisan Bawah) komponen
M2di North Sea dengan faktor gesekan r = 0,0025 dan r
= 0,0030
Amplitudo arus maksimum (lapisan Bawah) komponen
M2di North Sea dengan faktor gesekan r = 0,0035
xiii Lampiran 30 Lampiran 31 Lampiran 32 Lampiran 33 Lampiran 34 Lampiran 35 Lampiran 36 Lampiran 37 Lampiran 38 Lampiran 39 Lampiran 40
Fasa arus maksimum (lapisan Bawah) komponen M2di
North Sea dengan faktor gesekan r = 0,0016 dan r =
0,0020
Fasa arus maksimum (lapisan Bawah) komponen M2di
North Sea dengan faktor gesekan r = 0,0025 dan r =
0,0030
Fasa arus maksimum (lapisan Bawah) komponen M2di
North Sea dengan faktor gesekan r = 0,0035
Amplitudo/Fasa (Amphidromie) arus maksimum
(lapisan Atas) komponen M2 di North Sea yang
dimodelkan oleh (Xia Zongwan, N. Carbajal dan J.
Sündermann 1995)
Ellips arus pasut M2 permukaan (0-10 m) di North Sea
dengan berbagai variasi faktor gesekan
Ellips arus pasut M2lapisan bawah di North Sea dengan
Berbagai variasi faktor gesekan
Orientasi arus pasut M2 permukaan (0-10 m) di North
Sea dengan berbagai variasi faktor gesekan
Orientasi arus pasut M2 lapisan bawah di North Sea
dengan berbagai variasi faktor gesekan
Ellips arus pasut M2 permukaan (0-10 m) di North Sea
yang dimodelkan oleh (Xia Zongwan, N. Carbajal dan J.
Sündermann 1995)
Amplitudo pasut M2di Perairan Indonesia dengan faktor
gesekan r = 0,0016
Amplitudo pasut M2di Perairan Indonesia dengan faktor
gesekan r = 0,0025
xiv Lampiran 42 Lampiran 43 Lampiran 44 Lampiran 45 Lampiran 46 Lampiran 47 Lampiran 48 Lampiran 49 Lampiran 50 Lampiran 51 Lampiran 52 Lampiran 53 Lampiran 54
gesekan r = 0,0035
Fasa pasut M2 di Perairan Indonesia dengan faktor
gesekan r = 0,0016
Fasa pasut M2 di Perairan Indonesia dengan faktor
gesekan r = 0,0025
Fasa pasut M2 di Perairan Indonesia dengan faktor
gesekan r = 0,0035
Amplitudo arus maksimum lapisan atas komponen M2di
Perairan Indonesia dengan faktor gesekan r = 0,0016
Amplitudo arus maksimum lapisan atas komponen M2
di Perairan Indonesia dengan faktor gesekan r = 0,0025
Amplitudo arus maksimum lapisan atas komponen M2
di Perairan Indonesia dengan faktor gesekan r = 0,0035
Fasa arus maksimum lapisan atas komponen M2 di
Perairan Indonesia dengan faktor gesekan r = 0,0016
Fasa arus maksimum lapisan atas komponen M2 di
Perairan Indonesia dengan faktor gesekan r = 0,0025
Fasa arus maksimum lapisan atas komponen M2 di
Perairan Indonesia dengan faktor gesekan r = 0,0035
Amplitudo/Fasa (Amphidromie) pasut M2 di Laut Cina
Selatan/Selat Malaka dengan faktor gesekan r = 0,0016
Amplitudo/Fasa (Amphidromie) pasut M2 di Laut Cina
Selatan/Selat Malaka dengan faktor gesekan r = 0,0025
Amplitudo/Fasa (Amphidromie) pasut M2 di Laut Cina
Selatan/Selat Malaka dengan faktor gesekan r = 0,0035
Amplitudo/Fasa (Amphidromie) Arus Maksimum
(lapisan atas) komponen M2 di Laut Cina Selatan/Selat
xv Lampiran 55 Lampiran 56 Lampiran 57 Lampiran 58 Lampiran 59 Lampiran 60 Lampiran 61 Lampiran 62 Lampiran 63 Lampiran 64
Malaka dengan faktor gesekan r = 0,0016
Amplitudo/Fasa (Amphidromie) Arus Maksimum
(lapisan atas) komponen M2 di Laut Cina Selatan/Selat
Malaka dengan faktor gesekan r = 0,0025
Amplitudo/Fasa (Amphidromie) Arus Maksimum
(lapisan atas) komponen M2 di Laut Cina Selatan/Selat
Malaka dengan faktor gesekan r = 0,0035
Amplitudo/Fasa (Amphidromie) Pasut dan Arus
Maksimum (lapisan atas) komponen M2 di Laut Cina
Selatan yang dimodelkan oleh (Xia Zongwan, N.
Carbajal dan J. Sündermann 1995)
Amplitudo dan Fasa Pasut M2 di Selat Malaka yang
dimodelkan oleh (Rizal, S 1994)
Ellips Arus Permukaan (0 – 10 m) komponen M2 di
Laut Cina Selatan/Selat Malaka dengan berbagai variasi
faktor gesekan
Ellips Arus Permukaan (0 – 10 m) komponen M2 di
Laut Cina Selatan yang dimodelkan oleh (Xia Zongwan,
N. Carbajal dan J. Sündermann 1995)
Orientasi Arus Permukaan (0 – 10 m) komponen M2 di
Laut Cina Selatan/Selat Malaka dengan berbagai variasi
faktor gesekan
Amplitudo dan Fasa Pasut M2 di North Sea (53LU
-57LU, 4BB - 8BB)
Amplitudo dan Fasa Pasut M2di Perairan Indonesia (0
-3LU, 105BT - 108BT)
1
PENDAHULUAN
1.1 Latar Belakang
Laut merupakan medium yang tidak pernah berhenti bergerak, baik
dipermukaan maupun di kedalamannya. Hal inilah yang menyebabkan terjadinya
sirkulasi air, baik dalam skala besar maupun dalam skala kecil. Gerakan air laut yang
tidak pernah berhenti bergerak tersebut dipengaruhi oleh berbagai faktor seperti
angin, pasang surut, suhu, salinitas dan distribusi kerapatan air. Selain dari berbagai
pengaruh yang timbul terhadap gerakan air laut juga medium ini dipengaruhi oleh
gesekan baik itu gesekan udara dengan air, gesekan air dengan air maupun gesekan
air dengan dasar laut. Jika kita tinjau secara ilmu kelautan, para ahli oseanografi
masih meneliti tentang efek-efek gesekan yang terjadi dilautan untuk menghitung
atau menemukan faktor atau parameter dari gesekan itu sendiri. Namun demikian
dalam penelitian ini penulis ingin mendapat suatu faktor atau parameter gesekan yang
dimodelkan pada dinamika laut mendekati fenomena-fenomena yang terjadi di lautan.
Fenomena yang ingin diamati adalah pengaruh gesekan dasar laut terhadap titik
amphidromie pasang surut dan arus pasang surut (tidal currents) untuk komponen M2.
Pada dasarnya pemodelan dinamika laut untuk menentukan faktor atau parameter
gesekan dengan peninjauan titik amphidromie sangat penting untuk diteliti guna
2
1.2 Dasar Permasalahan
Jika diperhatikan dengan seksama, laut merupakan potensi sumberdaya hayati
yang sangat potensial, tetapi sementara ini sumberdayanya belum dimanfaatkan
secara efektif dan efisien. Dengan demikian untuk memulai mengekplorasi potensi
laut yang dikandungnya perlu dilakukannya suatu pemodelan laut untuk memperoleh
informasi-informasi yang terjadi di lautan terutama dengan peninjauan pasang surut
dan arus pasang surut (tidal currents). Pemodelan dinamika laut adalah salah satu cara
yang sangat efisien dalam menjaga dan eksplorasi sumber daya alam yang ada
didalamnya. Hasil pemodelan laut biasanya berupa data kecepatan u, v, w, dan tinggi
muka air laut . Dengan permodelan ini merupakan dasar mengekplorasi potensi laut
dalam pemamfaatan dan penyelamatan sumberdaya alam laut.
1.3 Batasan Masalah
Studi numerik dinamika oseanografi dilakukan di North Sea dan Perairan
Indonesia yang disimulasikan dalam bentuk model tiga dimensi. Data topografi dan
open boundary value bersumber dari Dr. Syamsul Rizal. Data tersebut akan diolah
untuk mendapatkan amplitudo/fasa pasang surut dan arus pasang surut (tidal currents)
komponen M2. Kemudian hasil kontur amplitudo dan fasa tersebut dibandingkan
pada literatur-literatur yang dimodelkan oleh (Müller-Navarra dan Mittelstaedt (1987)
dan (Xia Zongwan, N. Carbajal dan J. Sündermann 1995) serta (Davies dan Furnes
1.4 Tujuan Penelitian
1. Menentukan amplitudo/fasa pasang surut dan arus pasang surut (tidal currents)
di North Sea dan Perairan Indonesia
2. Melihat pengaruh faktor atau parameter gesekan terhadap perubahan pola posisi
amphidromie pasang surut dan arus pasang surut (tidal currents) untuk komponen
M2di North Sea dan Perairan Indonesia.
1.5 Manfaat Penelitian
1. Untuk memperoleh suatu faktor atau parameter gesekan.
2. Sebagai usaha untuk memotivasi bahwa kasus-kasus fisika oseanografi yang
dianggap sulit ternyata dapat divisualisasikan secara efisien dalam bentuk peta
atau kontur-kontur.
3. Sebagai informasi yang efisien dalam pengembangan sumber hayati maupun
4
BAB II
TINJAUAN PUSTAKA
2.1 Persamaan Dinamika Oseanografi
Total Gaya yang mempengaruhi dinamika oseanografi adalah: (Pond and Pickard, 1983):
F = Ftekanan + Fcoriolis + Fgravitasi + Fgesekan + Flainya (2-1)
Definisi gaya yang sering digunakan untuk dinamika oseanografi ialah gaya per
satuan massa. Sehingga dimensi gaya yang digunakan berdimensi percepatan LT-2.
Oleh karena itu definisi gaya persatuan massa ialah
dt dV a
F (2-2)
Persamaan air laut yang menggunakan gaya persatuan massa dinamakan persamaan
kecepatan.
Karena V merupakan fungsi posisi dan waktu V = V(x,y,z,t), maka
dt dz z V dt dy y V dt dx x V t V dt dV F konvektif suku lokal perubahan laju z V w y V v x V u t V (2-3)
Ruas kanan persamaan (2-8) terdapat suku lokal berupa
t V
dan suku yang
Bila seluruh gaya tersebut dijumlahkan
Fαp2ΩVgA2VFlainy a
Eliminasi F diperoleh
lainy a 2 F V A g V 2Ω p α dt dV
(2-4)
Persamaan (2-4) dinamakan persamaan dasar dinamikan air laut.
Gerakan air laut dapat digolongkan kedalam beberapa kelompok berdasarkan
penyebabnya.
1. Termohaline : Gerakan air laut yang terjadi karena adanya perbedaan densitas air
laut. Efek ini dinamakan juga efek Baroklinik.
2. Gerakan angin sangat berpengaruh pada lapisan atas, gelombang pendek dan
upwelling.
3. Arus pasang surut : Gerakan utama adalah horizontal dan sangat periodik yang
disebabkan oleh gaya gravitasi bulan dan matahari.
4. Tsunami seismic dihasilkan ketika terjadi pergerakan didasar laut selama gempa
bumi. Gerakan tsunami kecil konstribusinya terhadap energi laut. Namun karena
munculnya dalam waktu singkat sehingga kerapatan energinya sangat tinggi.
5. Gerakan tubulensi dihasilkan dari gerakan melingkar air laut pada arah yang
berlawanan dan sangat berperan pada kehilangan energi gerak air laut.
6. Ada bermacam-macam gerakan lainnya seperti aktifitas biologi, hujan, dan
6
Untuk menyederhanakan persamaan (2-4) dapat dilakukan dengan
memisahkan ke dalam komponen kearah sumbu x, y, dan z. Suku pada ruas kiri
dapat dengan mudah dipisahkan
dt dw k dt dv j dt du i dt dV
(2-5)
untuk gaya tekanan
z p kα y p jα x p iα p α
(2-6)
Suku gaya Coriolis diselesaikan dengan cara
Ωw Ωv
j
Ωu Ωw
k
Ωv Ωu
i w v u Ω Ω Ω k j i VΩ x y z y z z x x y
(2-7)
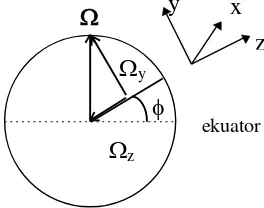
Besarnya komponen x, y, dan ztergatung pada sudut azimut .
ekuator x z y y z
Gambar 2-1 : Perhitungan komponen kecepatan rotasi bumi terhadap sudut azimut
sin Ω Ω cos Ω Ω 0 Ω z y x (2-8)
Sedangkan untuk gaya gravitasi bekerja pada sumbu z
Untuk gaya gesekan atau turbulensi 2 2 z 2 2 y 2 2 x 2 2 z 2 2 y 2 2 x 2 2 z 2 2 y 2 2 x 2 2 z w A y w A x w A k z v A y v A x v A j z u A y u A x u A i kw) jv (iu A V A (2-10)
Dengan menggunakan metode pemisahan komponen tersebut diperoleh tiga
persamaan secara terpisah
x 2 2 z 2 2 y 2 2 x F z u A y u A x u A w cos 2 v sin 2 x p α dt
du
(2-11a) x u F z u A y u A x u A + sin 2 y p α dt dv 2 2 z 2 2 y 2 2
x
(2-11b) w 2 2 z 2 2 y 2 2 x F z w A y w A x w A g v cos 2 z p α dt dw (2-11c)
Karena gerakan air laut lebih dominan secara horizontal dari pada vertikal w,
sehingga suku -2cos w dapat diabaikan. Suku gaya gesekan dapat dibagi kedalam
dua bagian yaitu horizotal
2 2 y 2 2 x 2 H H y A x A A
dan bagian vertikal
2 2 z 2 2 V z A z A .
Tekanan pada sumbu z ialah p(x,y,z) = patm + g (z + ). Dengan asumsi
8
y ζ g ζ) ρg(z p y α y p α x ζ g ζ) ρg(z p x α x p α atm atm (2-12)Dengan memasukkan suku konvektif maka persamaan (2-11a) dan (2-11b)
dan f = 2 sin , maka diperoleh (lihat juga Sündermann, 1971,Stronach et. al, 1993, Rizal and Sündermann, 1994 dan Rizal, 1997):
2 2 V 2 H H z u A u A x ζ g fv z u w y u v x u u t u
(2-13)
2 2 V 2 H H z u A v A y ζ g fu z v w y v v x v u t v
(2-14)
Dalam arah sumbu z (2-11c) suku g relatif besar sehingga dapat disederhanakan
menjadi persamaan hidrostatika
ρg z p (2-15)
Air laut diasumsikan incompresible maka persamaan kontinuitasnya menjadi
0 z w y v x u
V
(2-16)
Empat persamaan terakhir yang akan digunakan untuk pemodelan dinamika
Dengan tidak memasukkan suku konvektif maka diskrisitas yang dilakukan berupa 2 2 v 2 2 2 2 H z u A u Δy δ Δx δ A Δx Δζ g v f Δz Δu w Δt Δu
(2-17)
Diselesaikan untuk un+1, sehingga diperoleh
2 2 v 2 2 2 2 H 1 n z u t A u Δy δ Δx δ t A v tf Δx Δζ t g Δz Δu t w u u (2-18)
Dilakukan penyederhanaan L= ½ (x + y), maka
2x 2y
2 2 2 2 2 δ δ ΔL 1 Δy δ Δx δ
Untuk sementara turbulensi vertikal hanya dihitung gesekan antara air dan dasar laut
1 n b 2 2 v γ z u
A
(2-19) dengan asumsi b 2 2 b 2 b H C v u g
γ (2-20)
dimana Hb adalah ketebalan lapisan bawah dan C adalah koefesien gesek Chézy.
Sehingga persamaan (2-18) dapat dituliskan menjadi
10 b k , 1 b = k ), Δtγ 1/(1
Gx x (2-22)
Dalam Pendekatan semi implisit persamaan (2-21) menjadi:
(2 23)z u t A u δ δ ΔL Δt A v tf α Δx Δζ t g α) (1 Δx Δζ t g Δz Δu t w F G u 2 2 v 2 y 2 x 2 H 1 n u x 1 n
Dengan memisahkan suku yang mengandung indek n dan n+1 maka diperoleh bentuk
α Δx Δζ t g X G u 1 n x 1
n (2-24)
dimana suku dengan indek n nya
22 v 2 y 2 x 2 H u 1 n z u t A u δ δ ΔL Δt A v tf α) (1 Δx Δζ t g Δz Δu t w F X (2-25)
Terlihat bahwa GxX sama dengan un+1 pada persamaan full implisit. Selanjutnya
dengan langkah yang sama dilakukan untuk komponen kecepatan v sehingga
diperoleh vn+1.
α Δy Δζ t g Y G v 1 n y 1
n (2-26)
dengan b k , 1 b = k ), Δtγ 1/(1
Gx x (2-27)
22 v 2 y 2 x 2 H v 1 n z u t A v δ δ ΔL Δt A u tf α) (1 Δv Δζ t g Δy Δv t w F Y (2-28)Diskritisitas Persamaan kontinuitas (2-16) dapat dituliskan dalam bentuk
Δy
v
Δx
u
Δz
Δw
(2-29)
persamaan 2-28 dilakukan pendekatan forward different untuk ruas kanan dan
backward different untuk ruas kiri. Karena z = zk+1 - z = -H, tanda minus karena
perubahan ke dalam menuju ke bawah dasar laut.
Δy v H Δx u H
Δw (2-30)
Kuantitas ketebalan disesuaikan dengan posisi kecepatan.
x i 1 xi1
vHy vj 1Hyj1
Δy 1 H u uH Δx 1
Δw (2-31)
Dengan menggantikan u Xn+1 dan v Yn+1 untuk memanfaatkan nilai sesudah
perhitungan sementara un+1 dan vn+1.
i1
yj1
1 n 1 j y 1 n x 1 n 1 i x 1 n H Y H Y Δy 1 H X H X Δx 1
Δw
(2-32)
Kedua persamaan dapat digabungkan dengan menggunakan parameter implisitas .
y y j1
12
Persamaan kontinuitas ini dikerjakan untuk setiap lapisan dari dasar laut
dengan syarat batas pada dasar laut dan permukaan laut
t ζ w~ 0 w~ 1 k bottom k (2-34)
sehingga diperoleh tinggi muka air laut sementara
1 k 1
n ζ Δw
ζ (2-35)
Selanjutnya n+1 dapat diselesaikan dengan metode SOR (Backhaus 1983) ) ζ C ζ C ζ C ζ C ζ tw ( * ω ζ ) ω (1
ζ n 1
1 j y 1 n 1 i x 1 n 1 j y 1 n 1 i x j,1 i, 1 n 1 l 1, n 1 j 1 i
(2-36)
dimana l adalah indek iterasi, parameter relaksasi yang bervariasi 0 dan 2 dan
y x y
x C C C
C
ω/(1
ω* i-1 j1 (2-37)
2 x 2 x Δx a α
Δt g C
(2-38)
2 y 2
y a α
Δy Δt g C
(2-39)
dengan
b 1
1 k
x x x
x H k G H b
a (2-40)
b 1
1 k
y y y
y H k G H b
a (2-41)
Iterasi dapat berhenti sampai syarat batas ζ n1,l1 ζ n1 ε dan untuk seluruh kisi
2.2 Dinamika Laut yang Mempengaruhi titik amphidromie
Perubahan titik amphidromie pasang surut dan titik amphidromie arus yang
terjadi pada seluruh lautan dunia dipengaruhi oleh:
2.2.1 Pasang Surut (Tides)
Pasang Surut (pasut) adalah gerakan naik turunnya permukaan air laut secara
periodik yang disebabkan oleh gaya tarik bulan dan matahari. Dalam mekanika alam
semesta, jarak lebih menentukan dari pada massa. Oleh karena itu, walaupun massa
matahari lebih besar daripada massa bulan, namun bulan mempunyai peranan yang
lebih besar dalam menentukan arus pasut. Pengaruh benda angkasa lainnya dapat
diabaikan karena letaknya yang jauh.
Adanya tarikan gravitasi bulan yang kuat mengakibatkan bagian bumi yang
terdekat ke bulan akan tertarik sehingga perairan di daerah tersebut akan naik dan
menimbulkan pasang. Pada saat yang sama, bagian bola bumi dibaliknya akan
mengalami keadaan serupa yakni pasang juga. Sementara itu, pada sisi yang lain yang
tegak lurus dengan poros bumi-bulan, airnya akan bergerak ke samping hingga
menyebabkan terjadinya keadaan surut.
Bulan mengelilingi bumi selama 24 jam 51 menit. Dengan mengabaikan faktor
lain, maka suatu tempat di bumi dalam sehari akan mengalami dua kali pasang dan
dua kali surut. Hal ini dikenal dengan M2 Tide, dengan periode 12.42 jam. M2 Tide
merupakan pasut yang sangat dominan di Laut Utara. Tipe pasang surutnya yaitu
14
bulan, sedangkan apabila ditinjau dalam waktu bulanan, pasang akan terjadi pada
bulan baru/muda dan bulan purnama.
Disamping pengaruh bulan,pasut juga dipengaruhi oleh matahari. Kedudukan
bulan dan matahari selalu berubah secara relatif terhadap bumi. Apabila bulan dan
matahari berada kurang lebih pada satu garis lurus dengan bumi, seperti pada saat
bulan muda dan bulam purnama, maka gaya tarik keduanya akan saling memperkuat.
Pada keadaan demikian terjadilah pasang surut purnama (spring tide) dengan tinggi
air yang luar biasa, sebaliknya surutnya pun sangat rendah. Jika bulan dan matahari
membentuk sudut siku-siku terhadap bumi, maka gaya tarik keduanya akan saling
meniadakan. Akibatnya perbedaan tinggi air antara pasang dan surut hanya sangat
kecil. Keadaan ini dikenal dengan pasang surut perbani (neap tide).
2.2.2 Rotasi Bumi
Rotasi bumi menyebabkan terjadinya siang dan malam di bumi. Benda-benda
langit terbit di timur dan tenggelam di barat, hal ini menunjukkan bahwa bumi
berputar pada sumbunya dari barat ke timur. Gerak air ternyata juga dipengaruhi oleh
rotasi bumi. Perputaran bumi pada porosnya dari barat ke timur, membuat air laut
terseret ke arah barat. Pengaruh ini akan terasa semakin besar jika semakin dekat ke
khatulistiwa.
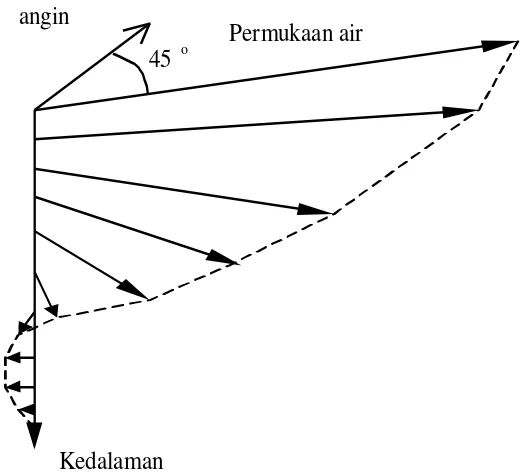
Gaya Coriolis timbul sebagai akibat dari perputaran bumi pada porosnya yang
yang mempengaruhi aliran massa air, dimana gaya ini akan membelokkan arah air
dari arah yang lurus. Akibatnya akan timbul suatu aliran arus dimana makin
makin dibelokkan arahnya. Hubungan ini dikenal dengan Spiral Ekman (Sahala Hutabarat, 1985).
Kedalaman
Permukaan air angin
45 o
Gambar 2-2 Spiral Ekman
2.3 Titik Amphidromie dan gesekan dasar laut 2.3.1 Titik Amphidromie
Amphidromie adalah suatu lokasi titik nol dimana nilai disekitarnya naik dan
turun dengan garis pasang surut yang berotasi berlawanan dengan arah jarum jam
(anti-clockwise) yang biasanya terjadi di bagian utara bumi dan yang berotasi searah
16
Gambar 2-3 Amphidromie pasang surut M2 di North Sea (Fischer 1958)
2.3.2 Gesekan dasar laut dan efek air dangkal
Jika arus mengalir melalui dasar laut, gesekannya akan menghasilkan pola
arus spiral Ekman diatas dasar laut tersebut, tetapi arah rotasinya yang spiral relatif
terhadap lapisan Ekman dekat permukaan yang dipengaruhi oleh angin. Pola arus itu
diperlihatkan dalam gambar 2-4 dengan gesekan bekerja pada dasar laut.
Dengan mengasumsikan bahwa Az adalah konstan, persamaan Ekman masih
dipakai, tetapi syarat batasnya berbeda. Kecepatan tangensial harus dihilangkan pada
dasar laut (u=v=0) dan harus menjadi suatu nilai konstanta didaerah efek gesekan
terjadi (di lapisan Ekman), dengan asumsi bahwa aliran geostropik di lapisan ini tidak
bergantung pada z.
Persamaan Ekman dapat ditulis dalam bentuk:
0, z
u A
fv 2E
2 Z
E
(2-42)
0, z
v A
fu 2E
2 Z E
(2-43)
2.4 Efek parameter gesekan terhadap posisi amphidromie
Gerakan air laut dipengaruhi oleh berbagai faktor seperti faktor angin, pasang
surut, rotasi bumi, suhu, dan perbedaan distribusi kerapatan. Namun demikian
gerakan air laut juga dipengaruhi oleh gesekan baik itu gesekan udara dengan air,
gesekan air dengan air ataupun gesekan air dengan dasar bawah laut.
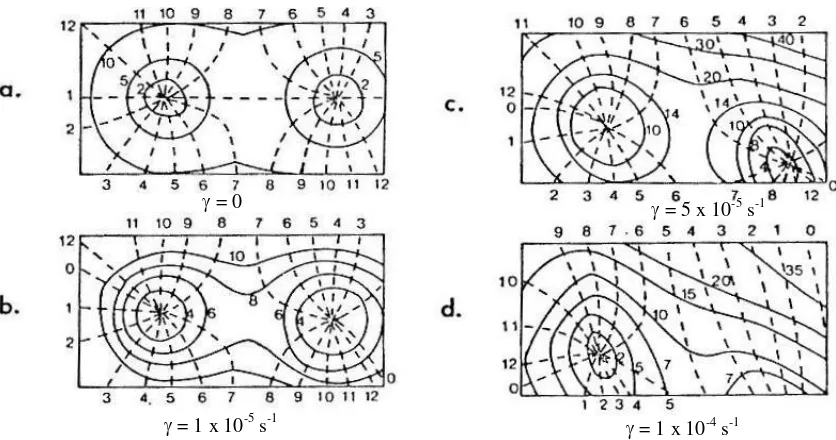
Efek gesekan terhadap posisi amphidromie pasang surut M2 dalam masalah
18
= 0
= 1 x 10-5 s-1
= 5 x 10-5 s-1
= 1 x 10-4 s-1
Gambar 2-5 Amphidromie pasang surut M2 dengan berbagai parameter gesekan ()
2.5 Syarat Batas dan Nilai Awal
Untuk menyelesaikan persamaan differensial beda hingga diperlukan syarat
batas untuk memperoleh penyelesaian yang khas. Namun dibutuhkan nilai awal untuk
titik yang lainnya untuk dapat memulai proses komputasi. Besarnya nilai awal tidak
akan berpengaruh pada solusi setelah interval yang cukup besar (Hansen, 1962).
Berarti kita mungkin memperoleh kecepatan arus dan tinggi muka air laut di laut
lepas informasi nilai awal. Pada pemodelan dinamika air laut digunakan nilai awal
u = v = w = 0 dan = 0 untuk t =0 (2-44)
Syarat batas pada daerah batas tertutup di set normal kecepatannya sama dengan
nol karena air tidak dapat masuk maupun keluar dari daerah batas tertutup (dasar laut
dan tepi pantai).
0
vn (2-45)
Sedangkan pada daerah batas terbuka (antara daerah air laut yang akan
dimodelkan dengan daerah diluar permodelan) didefinisikan:
a. Perubahan tinggi muka air laut dapat diramalkan dari data lapangan misal hasil
least square. Sedangkan untuk titik yang lain dilakukan dengan interpolasi linear
untuk amplitudo dan fasa gelombang harmonis.
b. Kecepatan tidak berubah pada arah normal
0 n vn (2-46)
2.6 Kedalaman North Sea
North Sea seperti yang terlihat pada Gambar 2.6 terletak pada posisi sebagai
berikut:
Pada posisi kiri bawah pada peta bathimetri mempunyai koordinat 48
LU, 4 BB
Pada posisi kiri atas pada peta bathimetri mempunyai koordinat 60 LU,
20
Pada posisi kanan bawah pada peta bathimetri mempunyai koordinat 48
LU, 1340' BT
Pada posisi kanan atas pada peta bathimetri mempunyai koordinat 60 LU,
1340' BT
Adapun grid horizontalnya secara longitudinal, yaitu = 20' dan secara
meridional, yaitu = 12'. Secara vertikal North Sea dibagi menjadi 8 lapis sebagai
berikut:0 - 10, 10 - 20, 20 - 30, 30 - 60, 60 - 100, 100 - 200, 200-300, dan 300-600 m.
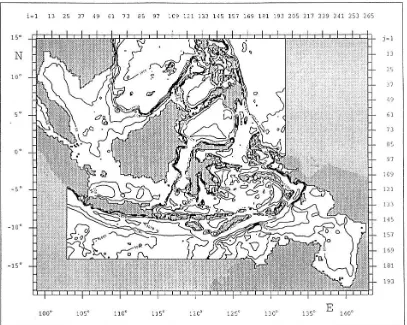
2.7 Perairan Indonesia
Letak geografis perairan Indonesia terletak diantara 18 S (bagian selatan)
sampai 15 N (bagian utara) dan 99 E (bagian timur) sampai 143 E (bagian timur).
Kontur kedalaman perairan Indonesia diperlihatkan pada gambar 2.7.
22
2.8 Perhitungan Amplitudo dan Fasa
Amplitudo dan fasa dihitung dengan cara berikut (Hansen, 1962):
2 2 2 1 ζ ζ
A (2-47)
dan 2 1 1 ζ ζ tan (2-48)
di mana A adalah amplitudo dan adalah fasa dari gelombang pasut M2, 1 dan 2
masing-masing adalah
)
ζ
(ζ 0.5
ζ T T/2
1
(2-49)
dan
)
ζ
(ζ 0.5
ζ T/4 3T/4
2
(2-50)
di mana ζ T/4,ζ T/2,ζ 3T/4 dan ζ T masing-masing adalah ketinggian muka air laut
pada waktu t = T/4, T/2, 3T/4 dan T. T adalah periode M2. Dan juga perhitungan
amplitudo dan fasa tersebut juga berlaku untuk kecepatan arus periode M2 dengan
23
METODELOGI PENELITIAN
3.1 Tempat dan Waktu Penelitian
Penelitian ini dilakukan di Laboratorium Fisika Komputasi Fakultas
Matematika dan Ilmu Pengetahuan Alam Universitas Syiah Kuala yang dilaksanakan
pada bulan Maret sampai Juli 2000.
3.2 Perangkat Penelitian
Dalam melaksanakan penelitian ini digunakan seperangkat komputer sebagai
alat bantu untuk menyelesaikan persamaan secara numerik dan juga pembuatan
visualisasi untuk memperlihatkan grafik yang berupa kontur-kontur. Perangkat lunak
(software) yang digunakan adalah program Fortran 77 under linux dan program
Matlab under windows.
3.3 Prosedur penelitian
Pelaksanaan penelitian pemodelan dinamika air laut untuk mendapatkan titik
amphidromie pasang surut dan arus pasang surut (tidal currens) dilakukan beberapa
tahap sebagai berikut:
1. Pemodelan dinamika air laut dimulai dengan pembacaan topografi batrimetri dan
24
surut komponen M2. Pemodelan ini bertujuan untuk menentukan posisi
amphidromie di North Sea.
2. Dalam pemodelan dinamika laut di North Sea menggunakan variasi gesekan
dengan faktor gesekan; r = 0,0016, r = 0,0020, 0,0025, 0,0030, dan 0,0035.
3. Menginterpolasikan data amplitudo dan fasa (Open Boundary) komponen M2agar
mendapatkan pasang surut dan kecepatan arus (u,v dan w) untuk mendapatkan
amplitudo, fasa pasut maupun arus pasut selanjutnya.
4. Data amplitudo, fasa pasut M2 dan arus pasut M2 disimpan, kemudian data
tersebut diplot contour dengan menggunakan matlab under windows untuk
melihat pola perubahan titik amphidromie akibat dari gaya gesekan (dengan
menvariasikan faktor gesekan (r) ).
25
PEMBAHASAN
4.1 Hasil Penelitian
Dari hasil penelitian untuk mendapat amplitudo dan fasa (amphidromie)
tinggi muka air laut dan arus u,v komponen M2 dengan faktor gesekan yang
bervariasi dapat dilihat dalam bentuk kontur-kontur sebagai informasi yang efisien
dalam pengembangan sumber hayati maupun sebagai informasi pelayaran
kapal-kapal. Namun demikian prediksi amphidromie pasut dan arus sangatlah
bermanfaat untuk mencari sumber daya mineral dilaut.
Adapun data-data amplitudo dan fasa tinggi muka air laut maupun arus u,v
komponen M2 digambarkan dalam bentuk kontur-kontur yang memperlihatkan
titik-titik amphidromie, arus ellips dan orientasi pasut M2 yang berotasi
berlawanan dengan arah jarum jam (anti-clockwise) maupun yang berotasi searah
jarum jam (clockwise) sebagai informasi dinamika laut .
Disamping itu ditunjukkan juga gambar amphidromie pasut, arus
komponen M2 di North Sea dan Laut Cina Selatan yang dimodelkan oleh
(Müller-Navarra dan Mittelstaedt (1987) dan (Xia Zongwan, N. Carbajal dan
J. Sündermann 1995) serta Davies dan Furnes (1980) sebagai salah satu literatur
26
4.2 Analisa Data dan Pembahasan
Titik-titik amphidromie pasut dan arus M2 dapat dihitung dengan
menggunakan persamaan 2.49 dan 2.50.
4.2.1 North Sea
Lampiran 2 sampai 4 memperlihatkan Amplitudo/Fasa (amphidromie) pasut
M2 di North Sea dengan suatu faktor gesekan r = 0.0016, r = 0.0020, r = 0.0025,
r = 0.0030 dan r = 0.0035. Dari lampiran tersebut dapat diartikan bahwa semakin
besar faktor r yang diberikan, posisi amphidromie akan sedikit bergerak ke utara
bumi (arah timur laut) ataupun akan sedikit bergerak ke selatan bumi. Secara
umum gambar yang ditunjukkan pada lampiran 2 sampai 4 sama seperti yang
dimodelkan oleh Fischer (1958), (Müller-Navarra dan Mittelstaedt (1987)) dan
(Xia Zongwan, N. Carbajal dan J. Sündermann 1995). Pola amphidromie pasut
M2 yang dimodelkan oleh Fischer (1958) (gambar 2-3) mendekati dengan pola
amphidromie pasut M2 dengan faktor gesekan r = 0.0035 yang diperlihatkan pada
lampiran 4. Sedangkan pola amphidromie pasut M2 yang dimodelkan oleh
(Müller-Navarra dan Mittelstaedt (1987)) dan (Xia Zongwan, N. Carbajal dan J.
Sündermann 1995) sedikit dekat dengan pola amphidromie pasut M2 dengan
faktor gesekan r = 0.0016 yang ditunjukkan pada lampiran 2.
Lampiran 7 sampai 11 ditunjukkan pola amplitudo/fasa (amphidromie) arus
u dan v pada lapisan atas (0 –10 m) untuk faktor gesekan r = 0.0016, r = 0.0020,
r = 0.0025, r = 0.0030 dan r = 0.0035, sedangkan lampiran 14 sampai 18
diperlhatkan juga pola amplitudo/fasa (amphidromie) arus u dan v lapisan bawah
Makna yang terkandung dalam pola amphidromie adalah distribusi arus u dan v
yang maksimum pada tiap-tiap titik di North Sea sebagai informasi arus tertinggi
dalam 1 periode M2. Fasa arus u dan v mempunyai maksud yaitu arah arus selama
1 periode pasang surut. Lampiran 7 sampai 11 dan 14 samapai 18 (dengan
mengambil Fasa arus u dan arus v) sudah valid dengan Fasa arus u dan arus v
yang dimodelkan oleh Davies dan Furnes (1980).
Lampiran 21 sampai 32 menjelaskan pola amplitudo/fasa (amphidromie)
arus maksimum lapisan atas (0 – 10 m) dan lapisan bawah yang diperoleh dari
arus u dan v untuk berbagai faktor gesekan. Lampiran ini menunjukkan resultan
kecepatan arus u dan v. Pergeseran posisi amphidromie kecepatan arus bila
dibesarkan faktor gesekan r maka arah geraknya seperti yang ditunjukkan
lampiran 1 - 3. Lampiran 21 sampai 26 secara garis besar sesuai dengan gambar
yang dimodelkan oleh (Xia Zongwan, N. Carbajal dan J. Sündermann 1995).
Lampiran 34 sampai 37 diperlihatkan arus ellips dan orientasi pasut M2.
Pada gambar ini memberikan informasi arah gerak arus ataupun bentuk rotasi
pasut selama 1 periode di North Sea. Lampiran 34 – 37 secara garis besar sudah
valid dengan model yang dikembangkan oleh (Xia Zongwan, N. Carbajal dan J.
Sündermann 1995).
4.2.2 Perairan Indonesia dan Laut Cina Selatan
Amplitudo/fasa (amphidromie) Pasut dan Arus M2 Perairan Indonesia
untuk berbagai faktor gesekan (r = 0.0016, r = 0.0025 dan r = 0.0035)
28
sampai 50. Pola amphidromie Pasut terbentuk disekitar laut Jawa dan laut Aru.
Perubahan faktor gesekan di perairan Indonesia terhadap posisi amphidromie
tidak dapat dibedakan dengan jelas. Akan tetapi untuk dapat dibedakan dengan
jelas kita ambil suatu bagian dari Perairan Indonesia yaitu Laut Cina Selatan/Selat
Malaka yang digambarkan pada lampiran 51 sampai 56. Dari lampiran 51 sampai
56 terlihat sedikit jelas memiliki perbedaan letak posisi amphidromie akibat dari
bertambahnya faktor gesekan r.Letak posisi amphidromie tersebut sedikit bergeser
ke arah timur laut (bagian utara) atau ke arah barat daya (bagian selatan).
Bentuk amphidromie pasut M2 yang diperlihatkan lampiran 51 sampai 56 secara
umum bentuk titik amphidromie sedikit sudah menyerupai model yang
dikembangkan oleh (Xia Zongwan, N. Carbajal dan J. Sündermann 1995).
Sedangkan bagian perairan Indonesia yaitu Selat Malaka secara umum, kontur
amplitudo dan Fasa Pasut serupa dengan yang dimodelkan oleh Rizal (1994).
Namun ada sedikit perbedaan yang mendasar. Hal ini disebabkan oleh penentuan
grid atau open boundary (syarat batas terbuka).
Lampiran 59 dan 61 ditunjukkan gambar elips dan orientasi arus di Laut
Cina Selatan / Selat Malaka sebagai informasi arah gerak atau rotasi pasut M2
selama 1 periode di Laut Cina Selatan / Selat Malaka. Gambar yang diperlihatkan
lampiran 59 sudah valid seperti yang dimodelkan oleh (Xia Zongwan, N. Carbajal
dan J. Sündermann 1995).
Perbandingan antara pergeseran amphidromie pasang surut M2di North Sea
dan di Perairan Indonesia akibat adanya variasi faktor gesekan dasar laut dapat
bahwa pergeseran amphidromie di Perairan Indonesia lebih cepat dibandingkan di
North Sea. Pergeseran tersebut lebih cepat di Perairan Indonesia dikarenakan
Perairan Indonesia dekat dengan garis khatulistiwa.
Berdasarkan hasil-hasil yang telah dijelaskan diatas, faktor gesekan yang
valid untuk perubahan posisi amphidromie tidak dapat diketahui berapa besarnya,
karena untuk pengukuran langsung di lapangan penulis belum mengukur nilai
amplitudo dan fasa pada titik-titik tertentu di North Sea maupun di Perairan
Indonesia. Disini penulis hanya memprediksikan amplitudo dan fasa dengan cara
pengesetan open boundary pada batas terbuka dengan menginterpolasikan nilai
amplitudo dan fasa agar memperoleh nilai selanjutnya pada titik-titik grid di North
30
BAB V
KESIMPULAN DAN SARAN
5.1 Kesimpulan
1. Titik Amphidromie pasang surut dan arus pasang surut di North Sea dan Perairan
Indonesia dapat disimulasikan dengan metode numerik.
2. Amphidromie pasang surut dan arus pasang surut merupakan amplitudo dan fasa
pada lokasi nol.
3. Akibat perubahan variasi faktor gesekan dasar laut, secara umum pergeseran
posisi amphidromie di Perairan Indonesia lebih cepat dibandingkan di North Sea.
4. Makin besarnya faktor gesekan dasar laut yang divariasikan, pola posisi
amphidromie di North Sea dan Perairan Indonesia akan bergeser kearah timur laut
(belahan bumi utara/BBU) atau kearah barat daya (belahan bumi selatan/BBS).
5. Posisi amphidromie di Perairan Indonesia terletak di sekitar laut Jawa dan
disekitar laut Aru.
5.2 Saran
1. Penelitian ini perlu dikembangkan lebih lanjut untuk mendapatkan faktor lain
yang mempengaruhi posisi amphidromie baik itu secara modelling maupun
2. Lautan yang sangat luas ini perlu diprediksi secara jelas guna diperoleh informasi
dinamika laut agar bermanfaat bagi pelayaran-pelayaran kapal maupun pencarian
sumber daya alam laut.
32
DAFTAR PUSTAKA
Davies, Furnes (1980): Observed and Computed M2 Tidal Currents in North Sea,
Journal of Physical Oceanography, Copyright American Meteorological Society.
Fischer, G. (1958): Ein numerisches Verfahren zur Errechnung von Windstau und Gezeiten in Randmeeren, International Meteorological Institute in Stockholm.
Hutabarat, Sahala dan Evans S (1985): Pengantar Oseanografi, Cet.2. UI Press. Jakarta.
Müller-Navarra, S.H. dan E. Mittelstaedt. (1987):Schadstoffausbreitung und Schad-stoffbelastung in der Nordsee–Eine Modellstudie, Deutsche hydrographische Zeit-schrift, Reihe B, Nr.18.
Pond, Stephen and G. L. Pickard. (1983): Introductory Dynamical Oceanography, Second Edition, New York, America: Pergamon Press.
Rienecker, Teubner (1980): A note on frictional effects in Taylor’s problem, Journal of Marine Research, Volume 38, No.2, 183–191.
Rizal, S. dan J. Sündermann (1994): On the M2-tide of the Malacca Strait: a
numerical investigation, German Journal of Hydrography, Volume 46, No. 1, 61- 80.
Rizal, S. (1994): Numeical Study on the Malacca Strait (Southeast Asia) with a Three-Dimensional Hydrodynamical Model, Universität Hamburg, Reihe B,
Nr.5.
Rizal, S. (2000): Pembuatan Model Tiga Dimensi sebagai Upaya untuk Melindungi dan Memanfaatkan Sumberdaya Alam Laut, Laporan Riset Unggulan Terpadu V Bidang Teknologi Perlindungan Lingkungan (1997-2000), Kantor Menristek.
LAMPIRAN 1
Flow Chart
Mulai
Baca topoi,j
Inisial awal
, u, v, w =0
, Gx, Gy, Cx, Cy
Hx (i,j,k), Hy( i,j,k)
Xn+1, Yn+1 , w~n+1
Interpolasi A danφ pada Open boundary value
Proses SOR
n+1, l+1
un+1 , vn+1, w n+1
n = 0, 40 periode Simpan Nilai A danφ untukn+1
, un+1, dan vn+1
Selesai Baca Open Boundary
Data Pribadi
Nama : ICHSAN SETIAWAN
Alamat : Jl. Elang, Lr. Merpati No. 62 Kelurahan Ateuk
Pahlawan
Banda Aceh 23249
Tempat/Tanggal Lahir : Bireuen, 7 Juni 1978
Jenis Kelamin : Laki-laki
Agama : Islam
Kebangsaan : Indonesia
Pendidikan Formal
Periode Nama Lembaga Pendidikan
1984–1990 SD Negeri 20 Banda Aceh
1990–1993 SMP Negeri 3 Banda Aceh
1993–1996 SMA Negeri 2 Banda Aceh
1996–2000 FMIPA Unsyiah Jurusan Fisika
Judul Karya Tulis
Pengaruh Gesekan dasar laut terhadap perubahan pola posisi amphidromie pasang
surut dan arus pasang surut (Tidal Currents) di North Sea dan Perairan Indonesia