5 BAB II
LANDASAN TEORI
2.1 Radio Frequency Identification (RFID)
2.1.1 Deskripsi RFID
RFID adalah proses identifikasi seseorang atau objek dengan menggunakan frekuensi transmisi radio. RFID menggunakan frekuensi radio untuk membaca informasi dari sebuah devais kecil yang disebut tag atau transponder (Transmitter +Responder). Tag RFID akan mengenali diri sendiri ketika mendeteksi sinyal dari devais yang kompatibel, yaitu pembaca RFID (RFID Reader).
RFID adalah teknologi identifikasi yang fleksibel, mudah digunakan, dan sangat cocok untuk operasi otomatis. RFID mengkombinasikan keunggulan yang tidak tersedia pada teknologi identifikasi yang lain. RFID dapat disediakan dalam devais yang hanya dapat dibaca saja (Read Only) atau dapat dibaca dan ditulis (Read/Write), tidak memerlukan kontak langsung maupun jalur cahaya untuk dapat beroperasi, dapat berfungsi pada berbagai variasi kondisi lingkungan, dan menyediakan tingkat integritas
data yang tinggi. Sebagai tambahan, karena teknologi ini sulit untuk dipalsukan, maka RFID dapat menyediakan tingkat keamanan yang tinggi.
Pada sistem RFID umumnya, tag atau transponder ditempelkan pada suatu objek.Setiap tag membawa dapat membawa informasi yang unik, di antaranya :serial number, model, warna, tempat perakitan, dan data lain dari objek tersebut. Ketika tag ini melalui medan yang dihasilkan oleh pembaca RFID yang kompatibel, tag akan mentransmisikan informasi yang ada pada tag kepada pembaca RFID, sehingga proses identifikasi objek dapat dilakukan.
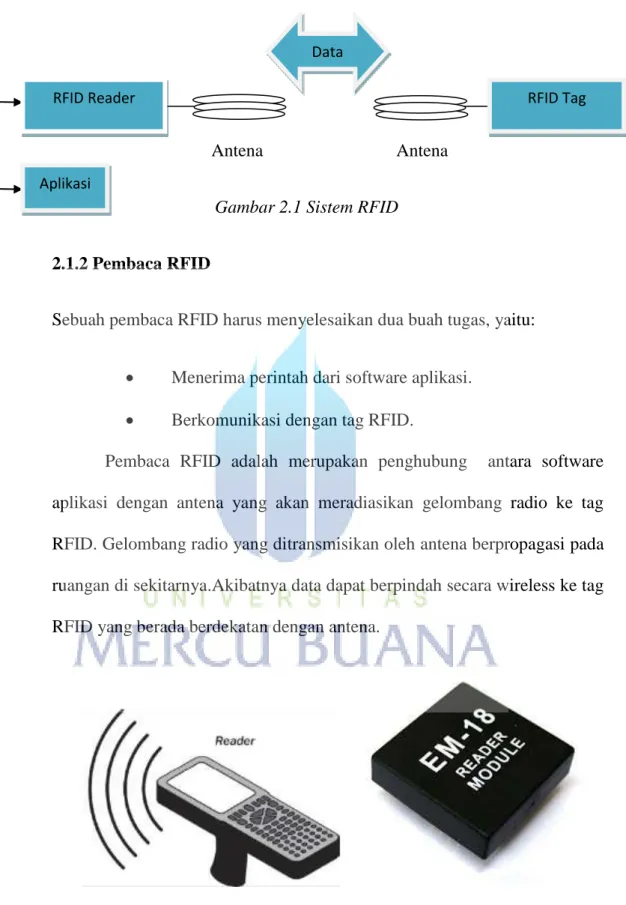
Sistem RFID terdiri dari empat komponen, di antaranya seperti dapat dilihat pada gambar 2.1:
Tag : Ini adalah devais yang menyimpan informasi untuk
identifikasi objek. Tag RFID sering juga disebut sebagai transponder.
Antena: Untuk mentransmisikan sinyal frekuensi radio antara pembaca RFID dengan tag RFID.
Pembaca RFID: Adalah devais yang kompatibel dengan tag RFID yang akan berkomunikasi secara wireless dengan tag.
Aplikasi: Adalah aplikasi pada sebuah workstation atau PC yang
dapat membaca data dari tag melalui pembaca RFID. Baik tag dan pembaca RFID diperlengkapi dengan antena sehingga dapat menerima dan memancarkan gelombang elektromagnetik.
Antena Antena
Gambar 2.1 Sistem RFID
2.1.2 Pembaca RFID
Sebuah pembaca RFID harus menyelesaikan dua buah tugas, yaitu:
Menerima perintah dari software aplikasi.
Berkomunikasi dengan tag RFID.
Pembaca RFID adalah merupakan penghubung antara software aplikasi dengan antena yang akan meradiasikan gelombang radio ke tag RFID. Gelombang radio yang ditransmisikan oleh antena berpropagasi pada ruangan di sekitarnya.Akibatnya data dapat berpindah secara wireless ke tag RFID yang berada berdekatan dengan antena.
Gambar 2.2 Contoh RFID Reader atau Pembaca Data
RFID Reader RFID Tag
Aplikasi
2.1.3 Tag RFID
Tag RFID adalah devais yang dibuat dari rangkaian elektronika dan antena yang terintegrasi di dalam rangkaian tersebut. Rangkaian elektronik dari tag RFID umumnya memiliki memori sehingga tag ini mempunyai kemampuan untuk menyimpan data. Memori pada tag dibagi menjadi sel- sel. Beberapa sel menyimpan data Read Only, misalnya serial number yang unik yang disimpan pada saat tag tersebut diproduksi. Sel lain pada RFID mungkin juga dapat ditulis dan dibaca secara berulang - ulang.
Berdasarkan catu daya tag, tag RFID dapat digolongkan menjadi:
1. Tag Aktif : yaitu tag yang catu dayanya diperoleh dari baterai, sehingga akan mengurangi daya yang diperlukan oleh pembaca RFID dan tag dapat mengirimkan informasi dalam jarak yang lebih jauh. Kelemahan dari tipe tag ini adalah harganya yang mahal dan ukurannya yang lebih besar karena lebih komplek. Semakin banyak fungsi yang dapat dilakukan oleh tag RFID maka rangkaiannya akan semakin komplek dan ukurannya akan semakin besar.
Adapun kecepatan RFID aktif ini yaitu 6,4 kbps dan ada juga yang 1,6 kbps.
2. Tag semi –Pasif : yaitu tag yang catu dayanya di peroleh oleh baterai, hanya dapat merespon transmisi yang datang (incoming transmissions). Memiliki jarak pembacaan yang lebih pendek dari tag aktif.
3. Tag Pasif : yaitu tag yang catu dayanya diperoleh dari medan yang dihasilkan oleh pembaca RFID. Rangkaiannya lebih sederhana, harganya jauh lebih murah, ukurannya kecil, dan lebih ringan. Adapun kecepatan RFID pasif yaitu 8 kbps. Kelemahannya adalah tag hanya dapat mengirimkan informasi dalam jarak yang dekat dan pembaca RFID harus menyediakan daya tambahan untuk tag RFID.
Gambar 2.3 Contoh gambar RFID Tag Pasif
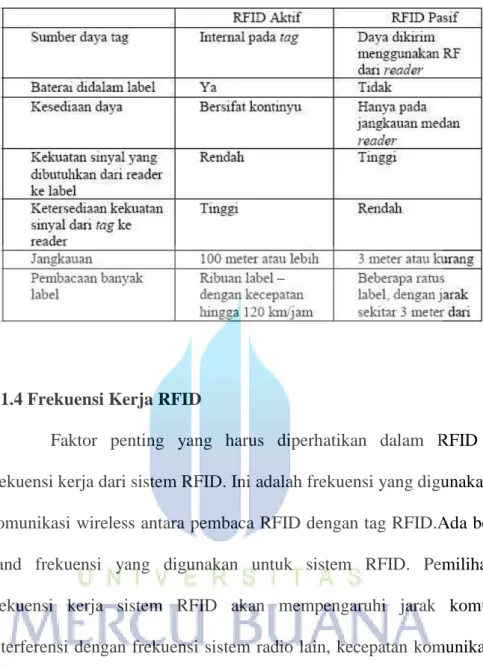
Berikut tabel perbandingan RFID aktif dan RFID pasif.
Tabel 2.1 Perbandingan RFID
2.1.4 Frekuensi Kerja RFID
Faktor penting yang harus diperhatikan dalam RFID adalah frekuensi kerja dari sistem RFID. Ini adalah frekuensi yang digunakan untuk komunikasi wireless antara pembaca RFID dengan tag RFID.Ada beberapa band frekuensi yang digunakan untuk sistem RFID. Pemilihan dari frekuensi kerja sistem RFID akan mempengaruhi jarak komunikasi, interferensi dengan frekuensi sistem radio lain, kecepatan komunikasi data, dan ukuran antena. Untuk frekuensi yang rendah umumnya digunakan tag pasif, dan untuk frekuensi tinggi digunakan tag aktif.
Pada frekuensi rendah, tag pasif tidak dapat mentransmisikan data dengan jarak yang jauh, karena keterbatasan daya yang diperoleh dari medan elektromagnetik.Akan tetapi komunikasi tetap dapat dilakukan tanpa kontak langsung. Pada kasus ini hal yang perlu mendapatkan perhatian adalah tag pasif harus terletak jauh dari objek logam, karena logam secara
signifikan mengurangi fluks dari medan magnet. Akibatnya tag RFID tidak bekerja dengan baik, karena tag tidak menerima daya maksimum untuk dapat bekerja.
Pada frekuensi tinggi, jarak komunikasi antara tag aktif dengan pembaca RFID dapat lebih jauh, tetapi masih terbatas oleh daya yang ada.
Sinyal elektromagnetik pada frekuensi tinggi juga mendapatkan pelemahan (atenuasi) ketika tag tertutupi oleh es atau air. Pada kondisi terburuk, tag yang tertutup oleh logam tidak terdeteksi oleh pembaca RFID.
Ukuran antena yang harus digunakan untuk transmisi data bergantung dari panjang gelombang elektromagnetik.Untuk frekuensi yang rendah, maka antena harus dibuat dengan ukuran yang lebih besar dibandingkan dengan RFID dengan frekuensi tinggi.
2.1.5 Sistem Modulasi RFID
Sebuah tag RFID dapat mengirimkan datanya denganmenggunakan modulasi pada sisi reader. Ada tiga skema modulasi yang sering digunakan, diantaranya :
a) Manchester Encoding.
b) Biphase Encoding.
c) PSK Encoding.
A. Skema Manchester Encoding
Dengan Manchester encoding sebuah tagakanmenghasilkan transisi tingkat di tengah-tengah periodebit. Transisi dari bit rendah (0) ke bit tinggi (1)direpresentasikan sebagai logika1. Sedangkan dari transisibit tinggi (1) ke bit rendah (0) direpresentasikan sebagail logika0. Gambar 2.2 menjelaskan tentang skema Manchester encoding.
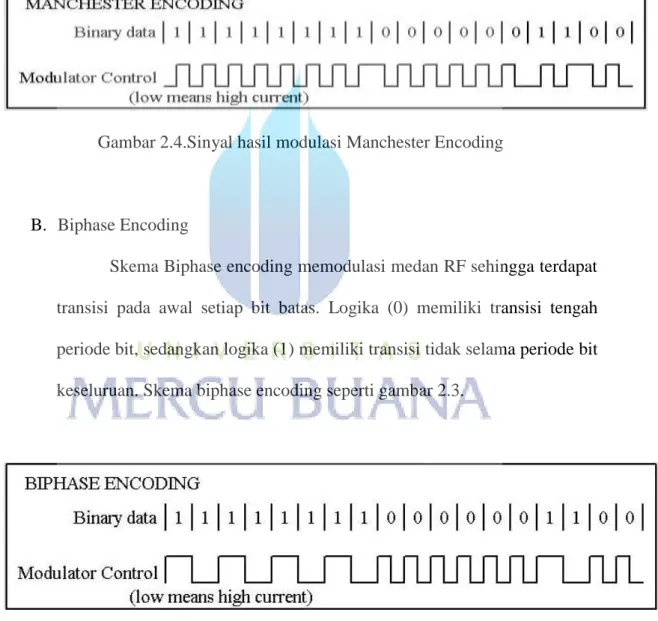
Gambar 2.4.Sinyal hasil modulasi Manchester Encoding
B. Biphase Encoding
Skema Biphase encoding memodulasi medan RF sehingga terdapat transisi pada awal setiap bit batas. Logika (0) memiliki transisi tengah periode bit, sedangkan logika (1) memiliki transisi tidak selama periode bit keseluruan. Skema biphase encoding seperti gambar 2.3.
Gambar 2.5.Sinyal hasil modulasi Biphase Encoding C. PSK Encoding
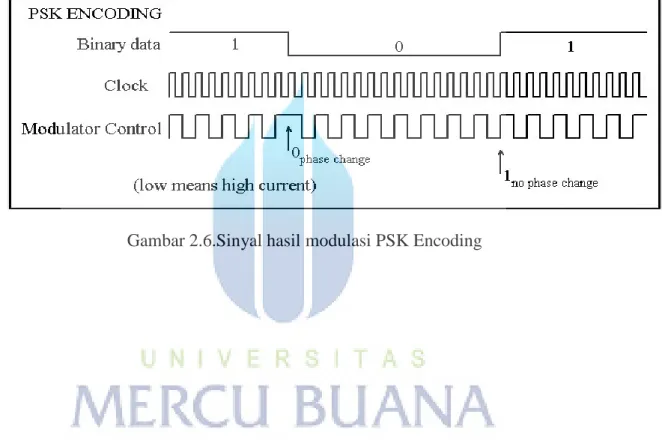
Dengan PSK (Phase Shift Keying) encoding dilakukan modulasi sehingga terdapat transisi data pada setiap clock periode.Ketika terjadi pergeseran fase direpresentasikan logika 0. Sedangkan logika 1 diinterpretasikan bila tidak ada perubahan fase pada batas bit[5]. Sinyal hasil modulasi PSK encoding seperti pada gambar 2.4.
Gambar 2.6.Sinyal hasil modulasi PSK Encoding
2.1.6 Akurasi RFID
Akurasi RFID dapat didefinisikan sebagai tingkat keberhasilan pembaca RFID melakukan identifikasi sebuah tag yang berada pada area kerjanya.
Keberhasilan dari proses identifikasi sangat dipengaruhi oleh beberapa batasan fisik, yaitu:
1. Posisi antena pada pembaca RFID.
2. Karakteristik dari material lingkungan yang mencakup sistem RFID.
3. Batasan catu daya.
4. Frekuensi kerja sistem RFID.
A. Akurasi Sistem RFID Frekuensi Rendah :
Pada frekuensi rendah,contohnya pada frekuensi 125-134 KHz, komunikasi frekuensi radio antara tag dengan pembaca RFID sangat bergantung pada daya yang diterima tag dari antena yang terhubung dengan pembaca RFID. Pada ruang bebas, intensitas dari medan magnet yang ditransmisikan oleh antena berkurang teradap jarak, maka terdapat batas jarak di mana tag tidak aktif, dan komunikasi frekuensi radio tidak dapat terjadi.
Pengurangan ukuran tag akan mengurangi juga batas jarak.
Komunikasi radio berkurang jika medan magnet harus menembus material yang mengurangi daya elektromagnetik, contohnya pada kasus objek dengan bahan logam. Tag RFID tidak akan terdeteksi ketika ditaruh di dalam
logam, karena material logam akan meredam fluks magnet yang melalui tag secara drastis.
Orientasi dari tag sangat penting dan dapat menyebabkan medan magnet bervariasi. Jika orientasi tag RFID sejajar dengan arah propagasi energi, maka fluks adalah nol dan komunikasi radio frekuensi tidak akan terjadi walaupun jarak antara antena dan tag sangat dekat.
B. Akurasi Sistem RFID Frekuensi Tinggi :
Pada frekuensi tinggi, contohnya pada frekuensi 13,56 MHz perfomansi dari sistem RFID sangat bergantung pada lingkungan di mana komunikasi di antara tag dan pembaca RFID terjadi. Pada jarak tanpa hambatan proses identifikasi dapat terjadi pada jarak 10 meter. Tetapi bila ada hambatan maka jarak ini akan berkurang secara drastis. Pada frekuensi tinggi, tag RFID bekerja secara aktif dengan daya dari baterai. Akurasi dari tag RFID dapat berkurang karena kekurangan daya. Akurasi dari sistem RFID pada umumnya sangat bergantung dari lingkungan di mana sistem RFID dioperasikan.Tantangan desain sistem RFID adalah melakukan desain infrastruktur RFID di antara lingkungan yang kurang bersahabat yang telah dijelaskan sebelumnya.
2.2 Mikrokontroller ATMEGA 2560
2.2.1 Deskripsi MikrokontrollerATMEGA 2560
Gambar 2.7. Arduino Mega 2560
AVR merupakan salah satu jenis mikrokontroler yang di dalamnya terdapat berbagai macam fungsi. Perbedaannya pada mikro yang pada umumnya digunakan seperti MCS51 adalah pada AVR tidak perlu menggunakan oscillator eksternal karena di dalamnya sudah terdapat internal oscillator. Selain itu kelebihan dari AVR adalah memiliki Power-On Reset, yaitu tidak perlu ada tombol reset dari luar karena cukup hanya dengan mematikan supply, maka secara otomatis AVR akan melakukan reset. Untuk beberapa jenis AVR terdapat beberapa fungsi khusus seperti ADC, EEPROM AVR.
ATmega 2560 adalah mikrokontroler CMOS 8-bit berarsitektur AVR RISC. Mikrokontroler dengan konsumsi daya rendah ini mampu mengeksekusi instruksi dengan kecepatan maksimum 16 MIPS pada frekuensi 16 MHz.
Atmega 2560 dapat bekerja pada tegangan antara 4,5 – 5,5 V.
2.2.2 PIN-PIN MIKROKONTROLER ATMEGA 2560
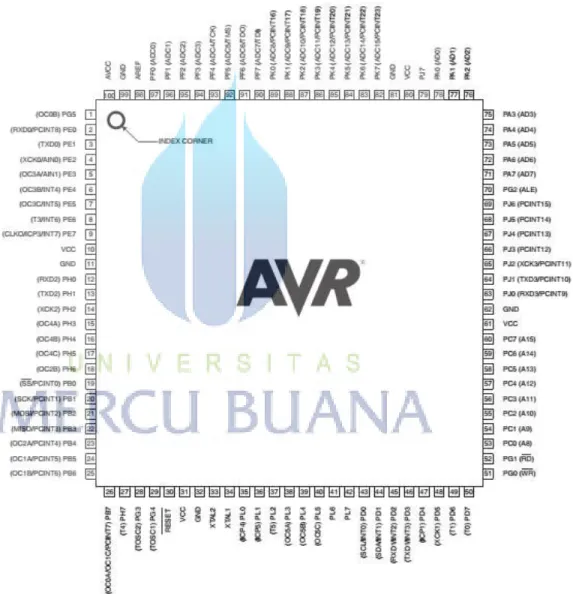
Gambar 2.8.Pin Mikrokontroler Atmega 2560
ATmega 2560 memiliki 100 Pin, yang masing-masing pinnya memiliki fungsi yang berbeda-beda baik sebagai port maupun fungsi yang lainnya.
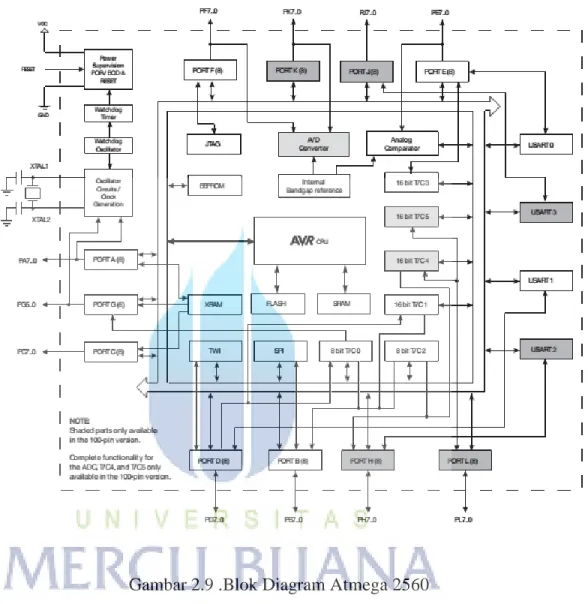
Gambar 2.9 .Blok Diagram Atmega 2560
Pada AVR status register mengandung beberapa informasi mengenai hasil dari kebanyakan hasil eksekusi instruksi aritmatik. Informasi ini digunakan untuk altering arus program sebagai kegunaan untuk meningkatkan performa pengoperasian. Register ini di-update setelah operasi ALU (Arithmetic LogicUnit) hal tersebut seperti yang tertulis dalam data sheet
khususnya pada bagian Instruction Set Reference. Dalam hal ini untuk beberapa kasus dapat membuang penggunaan kebutuhan instrukasi perbandingan yang telah didedikasikan serta dapat menghasilkan peningkatan dalam hal kecepatan dan kode yang lebih sederhana dansingkat. Register ini tidak secara otomatis tersimpan ketika memasuki sebuah rutin interupsi dan juga ketika menjalankan sebuah perintah setelah kembali dari interupsi.
Namun hal tersebut harus dilakukan melalui software.
.
2.3 MOTOR STEPPER
2.3.1 Definisi Motor Stepper
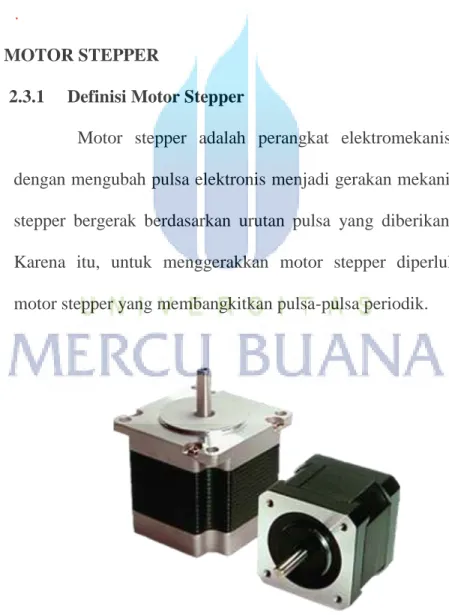
Motor stepper adalah perangkat elektromekanis yang bekerja dengan mengubah pulsa elektronis menjadi gerakan mekanis diskrit. Motor stepper bergerak berdasarkan urutan pulsa yang diberikan kepada motor.
Karena itu, untuk menggerakkan motor stepper diperlukan pengendali motor stepper yang membangkitkan pulsa-pulsa periodik.
Gambar 2.10. Motor Stepper
Motor stepper adalah sebuah peralatan elektromekanik yang mengubah pulsa elektrik menjadi pergerakan mekanik. Shaft atau kumparan motor stepper berputar per step ketika pulsa elektrik dimasukkan ke kumparan tersebut dengan urutan yang benar. Urutan pemberian pulsa ke motor stepper akan menyebabkan arah putaran yang berbeda. Sedangkan besarnya frekuensi dari pulsa akan mempengaruhi kecepatan putaran motor stepper.
Motro stepper berbeda dengan jenis motor AC ataupun motor DC, yang membedakan dengan jenis motor lainnya, pada motor AC dan motor DC salah satunya adalah dari segi putarannya. Motor Stepper adalah salah satu alat mesin listrik yang mengubah sinyal-sinyal listrik ke dalam gerakan-gerakan mekanis diskrit. Batang atau spindle dari suatu Motor Stepper berputar disebabkan kenaikan- kenaikan langkah diskrit ketika sinyal listrik berada didalam urutan yang tepat.
Urutan sinyal pulsa yang diterapkan secara langsung dihubungkan dengan arah rotasi spindle motor. Kecepatan dari rotasi spindle motor dihubungkan dengan frekuensi dari sinyal masukan dan panjang rotasi secara langsung berhubungan dengan nomor sinyal masukan.
Pada motor stepper umumnya tertulis speifikasi Np (= pulsa/rotasi).
Sedangkan kecepatan pulsa diekspresikan sebagai pps (= pulsa persekon) dan kecepatan putar umumnya ditulis sebagai (= rotasi/menit atau rpm). Kecepatan putar motor stepper (rpm) dapat diekspresikan menggunakan kecepatan pulsa (pps) sebagai berikut :
Oleh karena 1 rotasi = 360 , maka tingkat ketelitian motor stepper dapat dilihat dalam rumus sebagai berikut :
Penggunaan motor stepper memiliki beberapa keunggulan dibandingkan dengan penggunaan motor DC biasa. Keunggulannya antara lain adalah :
a. Sudut rotasi motor proporsional dengan pulsa masukan sehingga lebih mudah diatur.
b. Motor dapat langsung memberikan torsi penuh pada saat mulai bergerak c. Posisi dan pergerakan repetisinya dapat ditentukan secara presisi
d. Memiliki respon yang sangat baik terhadap mulai, stop dan berbalik (perputaran)
e. Sangat realibel karena tidak adanya sikat yang bersentuhan dengan rotor seperti pada motor DC
f. Dapat menghasilkan perputaran yang lambat sehingga n beban dapat dikopel langsung ke porosnya
g. Frekuensi perputaran dapat ditentukan secara bebas dan mudah pada range yang luas.
2.3.2 Prinsip Kerja Motor Stepper
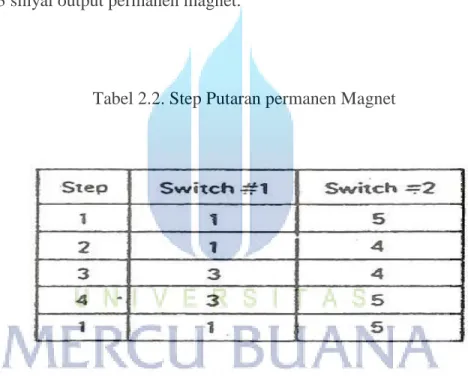
Motor Stepper adalah motor DC yang gerakannya bertahap (step per step) dan memiliki akurasi yang tinggi tergantung pada spesifikasinya. Setiap motor stepper mampu berputar untuk setiap stepnya dalam satuan sudut (0.75, 0.9, 1.8) derajat, makin kecil sudut per step-nya maka gerakan per step-nya motor stepper tersebut makin presisi. Cara kerja stepper motor didasari dengan prinsip magnet dasar seperti kutub magnet. Berikut tabel 2.2 step putaran permanen magnet dan tabel 2.3 sinyal output permanen magnet.
Tabel 2.2. Step Putaran permanen Magnet
Tabel 2.3. Sinyal output Permanen Magnet
Motor stepper mempunyai beragam macam gulungan kumparan dan berbagai kombinasi rotor. Dan juga terdapat beberapa cara dalam memberikan urutan energi pada kumparan medan (field coil). Semua faktor tersebut menentukan ukuran pada masing-masing step.Phase menunjukkan banyaknya rangkaian kumparan yang terpisah. Menurut banyaknya phasa, motor stepper dibagi menjadi unipolar stepper dan bipolar stepper, seperti terlihat pada gambar 2.11
Gambar 2.11. Motor stepper menurut jumlah phase
Motor stepper dua-phase (bipolar) mempunyai konstruksi yang mirip dengan jenis unipolar, hanya tidak terdapat tap pada kumparannya. Penggunaan motor stepper jenis bipolar memerlukan rangkain yang agak lebih rumit untuk mengatur agar motor ini dapat berputar dalam dua arah. Untuk menggerakkan motor stepper jenis ini biasanya diperlukan sebuah driver motor yang dikenal dengan namaH bridge. Rangkaian ini akan mengontrol setiap kumparan secara terpisah (independent) termasuk polaritas untuk setiap kumparan. Gambar rangkaian dari motor stepper bipolar dapat dilihat pada gamabr 2.12.
Gambar 2.12 Motor stepper dua-phase (bipolar)
Motor stepper dua-phase (bipolar) hanya mempunyai dua rangkaian tetapi sebenarnya terdiri dari empat kutub medan.
2.4 Buzzer
Gambar 2.13 Buzzer
Buzzer adalah sebuah komponen elektronika yang berfungsi untuk mengubah getaran listrik menjadi getaran suara. Pada dasarnya prinsip kerja buzzer hampir sama dengan loud speaker, jadi buzzer juga terdiri dari kumparan yang terpasang pada diafragma dan kemudian kumparan tersebut dialiri arus sehingga menjadi elektromagnet, kumparan tadi akan tertarik ke dalam atau keluar, tergantung dari
arah arus dan polaritas magnetnya, karena kumparan dipasang pada diafragma maka setiap gerakan kumparan akan menggerakkan diafragma secara bolak-balik sehingga membuat udara bergetar yang akan menghasilkan suara. Buzzer biasa digunakan sebagai indikator bahwa proses telah selesai atau terjadi suatu kesalahan pada sebuah alat (alarm). Frekuensi yang dikeluarkan oleh buzzer yaitu antara 1 – 5 KHz.
2.5 LCD ( LIQUID CRYSTAL DISPLAY )
LCD atau Liquid Crystal Display sekarang semakin banyak digunakan, dari yang berukuran kecil, seperti LCD pada sebuah mp3 player, sampai yang berukuran besar seperti monitor komputer atau televisi. Warna yang dapat ditampilkan bisa bermacam-macam.Dari yang satu warna (monokrom) sampai 65.000 warna. Pola ( pattern ) LCD juga bisa bervariasi, dari pola yang membentuk pola seven segmen ( misalnya LCD yang dipakai untuk jam tangan ) sampai LCD yang bisa menampilkan karakter atau teks dan LCD yang bisa menampilkan gambar.
LCD sangat berbeda dengan display 7 segmen atau display dot matriks.
Untuk menyalakan LCD diperlukan sinyal khusus ( gelombang AC ). Oleh karena itu, diperlukan IC driver yang khusus juga. Pada LCD yang bisa menampilkan karakter ( LCD karakter ) dan LCD yang mampu menampilkan gambar ( LCD grafik ), diperlukan memori untuk membangkitkan gambar dan juga RAM untuk menyimpan data ( teks atau gambar ) yang sedang ditampilkan. Diperlukan pula pengendali ( controller ) untuk berkomunikasi dengan mikrokontroler.
LCD karakter adalah LCD yang dapat menampilkan karakter ASCII dengan format dot matriks. LCD jenis ini bisa dibuat dengan berbagai ukuran, 1 sampai 4 baris, 16 sampai 40 karakter per baris dan dengan ukuran 5x7 atau 5x10. LCD ini biasanya dirakit dengan sebuah PCB yang berisi pembangkit karakter dan ic pengendali beserta drivernya. Walaupun ukuran LCD berbeda-beda, tetapi ic pengendali yang digunakan biasanya sama. Antarmuka yang digunakan sesuai dengan level tegangan digital TTL ( transistor-transistor logic ) dengan lebar bus data yang bisa dipilih 4 bit atau 8 bit. Pada bus data 4 bit komunikasi akan lebih lama karena baik data atau perintah dikirim 2x, tetapi karena mikrokontroler sangat cepat, hal ini tidak akan menjadi masalah. Penggunaan bus data 4 bit akan menghemat pemakaian port mikrokontroler.
Gambar 2.14. LCD 16x2
2.5.1 Rangkaian Antarmuka LCD
Umumnya sebuah LCD karakter aakan mempunyai 16 pin untuk mengendalikannya. Pin-pin terdiri atas 2 pin catudaya ( Vcc dan Vss ), 1 pin untuk
mengatur kontras LCD ( Vee ), 3 pin kendali ( RS, R/W dan E ), 8 pin data ( db0- db7), 2 pin untuk memberikan tegangan ke dioda back light ( disimbolkan dengan A dan K ). Tabel 2.4 memperlihatkan pin-pin LCD dan fungsinya.
Pin catudaya ( Vcc dan Vss ) dihubungkan dengan catu daya TTL, 5 volt dan 0 volt atau ground yang akan menyediakan catu daya bagi ic pengendali. Pin Vee akan menyediakan tegangan untuk LCD untuk mengatur kontras LCD, secara sederhana tegangan Vee bisa diberikan melalui pin tengah sebuah trimpot ( trimer potentiometer ), yang mempunyai inilah 10k ohm-22k ohm. Untuk antarmuka LCD ke mikrokontroler dapat dilihat pada gambar.
Gambar 2.15. Antarmuka LCD ke mikrokontroler
Tiga pin pengendali ( RS, R/W dan E ) dihubungkan dengan pin mikrokontroler. Pin RS ( Register Select ) digunakan untuk memilih apakah data yang dikirimkan ke LCD instruksi atau data. Jika RS = 0, berarti mikrokontroler sedang mengirimkan instruksi, sebaliknya jika RS = 1, berarti mikrokontroler sedang mengirimkan data. Pin R/W ( read/write ) digunakan untuk menentukan operasi
baca/tulis. Jika R/W = 0, berarti menulis data atau instruksi ke LCD sedangkan jika R/W = 1, pembacaan dari LCD, karena itu pin ini bisa dihubungkan langsung dengan ground untuk menghemat pemakaian pin mikrokontroler. Pin E ( Enable ) berfungsi untuk mengeksekusi data atau instruksi yang dikirimkan dari mikrokontroler, sinyal dikirimkan berupa sinyal positif. Pin db0-db7 merupakan bus data untuk mengirimkan atau membaca data atau instruksi ke LCD ( dua arah ).
Tabel antarmuka LCD
Tabel 2.4 Antarmuka LCD
NO NAMA FUNGSI KETERANGAN
1 Vss Catu daya (0V atau gnd) 2 Vcc Catu daya +5 Volt
3 Vee Contrast LCD
4 RS Register Select, untuk memilih mengirim perintah atau data (input)
‘0’ = memilih register perintah
‘1’ = register data
5 R/W Read/write, pin pengendali untuk baca tulis
‘0’ = tulis ke LCD atau dihubungkan ke gnd
‘1’ = baca dari LCD
6 E Enable, untuk mengaktifkan LCD, untuk memulai operasi baca atau tulis
Pulsa : rendah – tinggi – rendah
7-14 db0-db7 Busa data Pada operasi 4 bit hanya
db4-db7 yang dipakai, yang lain sebaiknya digroundkan.
15-16 Back light
Tegangan yang diberikan untuk menyalakan lampu back light LCD
Diberi tegngan 5V dan diseri dengan resistor 680ohm