1
TRANSFORMASI DAN KONVERSI KOORDINAT A. DESKRIPSI UMUM
Sistem Referensi Geospasial Indonesia (SRGI) yang diluncurkan pada tanggal 17 Oktober 2013 merupakan sistem referensi yang berlaku di wilayah Indonesia dimana dalam perealisasiannya mengacu pada kerangka referensi geosentrik global ITRF08/IGS08 epoch 2005.0. SRGI 2013 didefinisikan pada epoch 2012.0 tanggal 1 Januari 2012. Pada tahun 2021, dilakukan pemutakhiran SRGI2013 yang didefinisikan pada epoch 2021.0. SRGI2013 epoch 2021.0 juga merupakan sistem referensi untuk wilayah Indonesia yang dalam perealisasiannya mengacu pada kerangka referensi geosentrik global ITRF2014/IGb14 epoch 2010.0. Transformasi koordinat diperlukan dalam pendefisian SRGI2013 epoch 2012.0 ke SRGI2013 epoch 2021.0.
Transformasi koordinat merupakan kegiatan menghitung nilai koordinat dari satu sistem koordinat ke sistem koordinat lainnya. Dalam proses transformasi koordinat ini diperlukan nilai-nilai parameter yang menghubungkan antara kedua sistem referensi tersebut. Nilai-nilai parameter transformasi tersebut didapatkan dari titik-titik sekutu, dimana titik-titik sekutu ini merupakan titik- titik stasiun referensi yang memiliki nilai pada kedua sistem koordinat yang terlibat dalam proses transformasi koordinat.
B. LAYANAN
Menu transformasi koordinat dapat diakses pada website SRGI dengan klik ikon “Transformasi dan Konversi Koordinat” atau dengan klik Produk > Survei dan Pemetaan > Transformasi dan Konversi Koordinat. Website SRGI menyediakan empat jenis menu transformasi antara lain:
1. Transformasi antar epoch
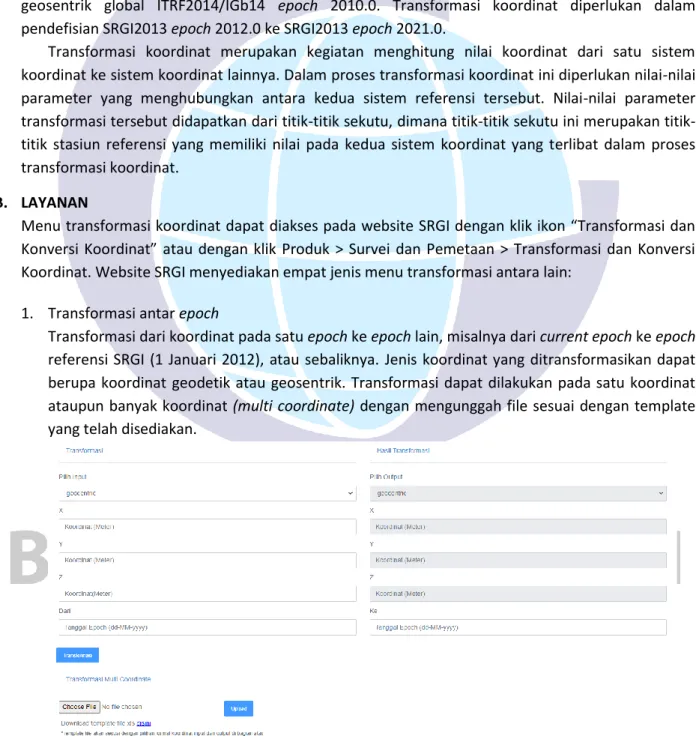
Transformasi dari koordinat pada satu epoch ke epoch lain, misalnya dari current epoch ke epoch referensi SRGI (1 Januari 2012), atau sebaliknya. Jenis koordinat yang ditransformasikan dapat berupa koordinat geodetik atau geosentrik. Transformasi dapat dilakukan pada satu koordinat ataupun banyak koordinat (multi coordinate) dengan mengunggah file sesuai dengan template yang telah disediakan.
Gambar 1. Tampilan transformasi antar epoch (Sumber: https://srgi.go.id)
2 2. Transformasi antar datum
Transformasi koordinat dari koordinat SRGI2013 (Kerangka Referensi Global ITRF 2008 Epoch 2005) ke SRGI2013 (Kerangka Referensi Global ITRF 2014 Epoch 2010) ataupun sebaliknya. Jenis koordinat yang ditransformasikan dapat berupa koordinat geodetik atau geosentrik. Transformasi dapat dilakukan pada satu koordinat ataupun banyak koordinat (multi coordinate) dengan mengunggah file sesuai dengan template yang telah disediakan.
Gambar 2. Tampilan transformasi antar datum (Sumber: https://srgi.go.id) 3. Transformasi geodetik-geosentrik
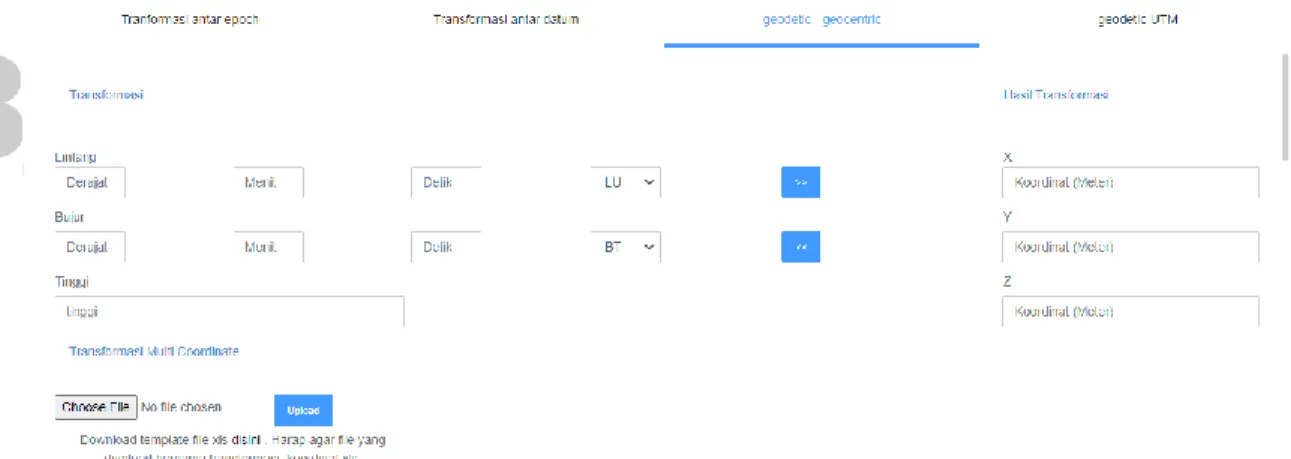
Transformasi koordinat dari sistem koordinat geodetik (lintang, bujur, tinggi) ke sistem koordinat geosentrik (X,Y,Z) ataupun sebaliknya. Transformasi dapat dilakukan pada satu koordinat ataupun banyak koordinat (multi coordinate) dengan mengunggah file sesuai dengan template yang telah disediakan.
Gambar 3. Tampilan transformasi geodetic-geosentik (sumber: https://srgi.go.id)
3 4. Transformasi geodetik-UTM
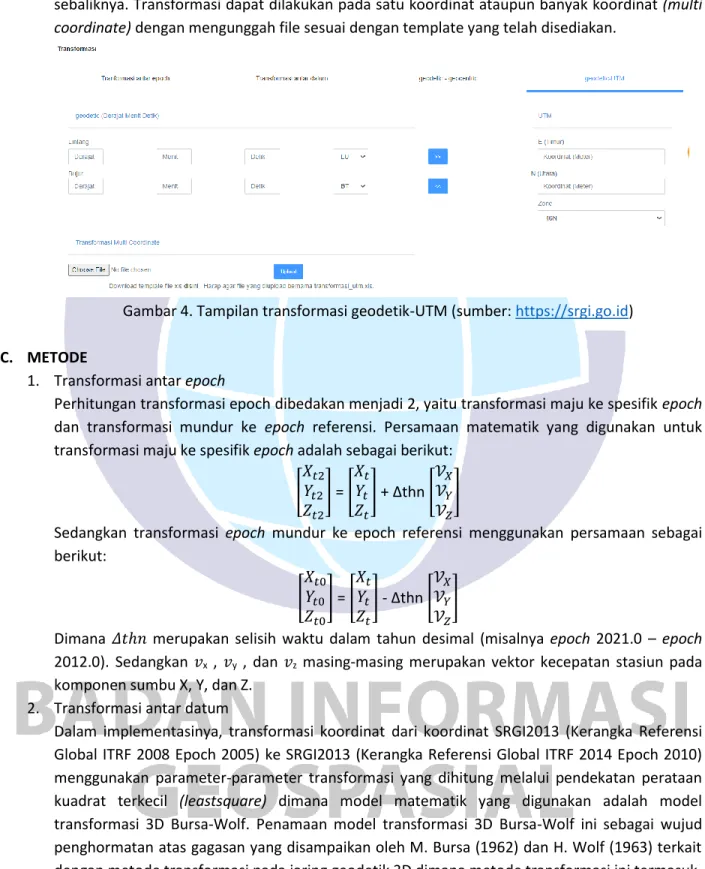
Transformasi koordinat dari sistem koordinat geodetik ke sistem koordinat proyeksi UTM ataupun sebaliknya. Transformasi dapat dilakukan pada satu koordinat ataupun banyak koordinat (multi coordinate) dengan mengunggah file sesuai dengan template yang telah disediakan.
Gambar 4. Tampilan transformasi geodetik-UTM (sumber: https://srgi.go.id) C. METODE
1. Transformasi antar epoch
Perhitungan transformasi epoch dibedakan menjadi 2, yaitu transformasi maju ke spesifik epoch dan transformasi mundur ke epoch referensi. Persamaan matematik yang digunakan untuk transformasi maju ke spesifik epoch adalah sebagai berikut:
[ 𝑋𝑡2
𝑌𝑡2 𝑍𝑡2
] = [ 𝑋𝑡
𝑌𝑡 𝑍𝑡
] + Δthn [ 𝒱𝑋 𝒱𝑌 𝒱𝑍 ]
Sedangkan transformasi epoch mundur ke epoch referensi menggunakan persamaan sebagai berikut:
[ 𝑋𝑡0 𝑌𝑡0 𝑍𝑡0
] = [ 𝑋𝑡 𝑌𝑡 𝑍𝑡
] - Δthn [ 𝒱𝑋
𝒱𝑌 𝒱𝑍 ]
Dimana 𝛥𝑡ℎ𝑛 merupakan selisih waktu dalam tahun desimal (misalnya epoch 2021.0 – epoch 2012.0). Sedangkan 𝑣x , 𝑣y , dan 𝑣z masing-masing merupakan vektor kecepatan stasiun pada komponen sumbu X, Y, dan Z.
2. Transformasi antar datum
Dalam implementasinya, transformasi koordinat dari koordinat SRGI2013 (Kerangka Referensi Global ITRF 2008 Epoch 2005) ke SRGI2013 (Kerangka Referensi Global ITRF 2014 Epoch 2010) menggunakan parameter-parameter transformasi yang dihitung melalui pendekatan perataan kuadrat terkecil (leastsquare) dimana model matematik yang digunakan adalah model transformasi 3D Bursa-Wolf. Penamaan model transformasi 3D Bursa-Wolf ini sebagai wujud penghormatan atas gagasan yang disampaikan oleh M. Bursa (1962) dan H. Wolf (1963) terkait dengan metode transformasi pada jaring geodetik 3D dimana metode transformasi ini termasuk
4
kedalam metode transformasi conform (mempertahankan bentuk). Berikut ini ilustrasi dan persamaan model matematik Bursa-Wolf.
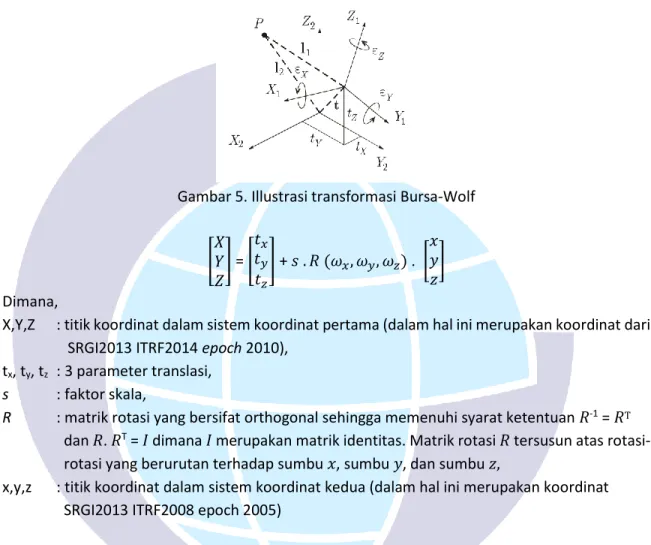
Gambar 5. Illustrasi transformasi Bursa-Wolf
[ 𝑋 𝑌 𝑍
] = [ 𝑡𝑥 𝑡𝑦 𝑡𝑧
] + 𝑠 . 𝑅 (𝜔𝑥, 𝜔𝑦, 𝜔𝑧) . [ 𝑥 𝑦 𝑧
] Dimana,
X,Y,Z : titik koordinat dalam sistem koordinat pertama (dalam hal ini merupakan koordinat dari SRGI2013 ITRF2014 epoch 2010),
tx, ty, tz : 3 parameter translasi, s : faktor skala,
R : matrik rotasi yang bersifat orthogonal sehingga memenuhi syarat ketentuan 𝑅-1 = 𝑅T dan 𝑅. 𝑅T = 𝐼 dimana 𝐼 merupakan matrik identitas. Matrik rotasi 𝑅 tersusun atas rotasi- rotasi yang berurutan terhadap sumbu 𝑥, sumbu 𝑦, dan sumbu 𝑧,
x,y,z : titik koordinat dalam sistem koordinat kedua (dalam hal ini merupakan koordinat SRGI2013 ITRF2008 epoch 2005)
Dalam hal kasus transformasi koordinat antar hasil pengamatan GPS, sudut-sudut rotasi yang terbentuk sangatlah kecil sehingga cos 𝜔i = 1, sin 𝜔i = 𝜔i , dan 𝜔i 𝜔j = 0. Dengan demikian matrik rotasi bisa dinyatakan sebagai berikut:
𝑅 (𝜔𝑥, 𝜔𝑦, 𝜔𝑧) = [
1 𝜔𝑥 −𝜔𝑦
−𝜔𝑧 1 𝜔𝑥
𝜔𝑦 −𝜔𝑥 1
] Faktor skala di ekspresikan sebagai berikut:
s = 1 + ds
dimana ds nilainya sangat kecil dalam fraksi ppm (part per million). Secara praktis biasanya dinyatakan sebagai mm/km. Sehingga persamaan Bursa-Wolf menjadi:
5 [
𝑋 𝑌 𝑍
] = [ 𝑡𝑥 𝑡𝑦 𝑡𝑧
] + (1 + 𝑑𝑠) [
1 𝜔𝑧 −𝜔𝑦
−𝜔𝑧 1 𝜔𝑥
𝜔𝑦 −𝜔𝑥 1
] [ 𝑥 𝑦 𝑧
]
Untuk rotasi matrik dengan sudut yang sangat kecil, inverse dari matrik rotasi 𝑅 hasilnya adalah matrik transpose dari 𝑅 (𝑅−1 = 𝑅𝑇), artinya matrik tersebut adalah matrik orthogonal. Selanjutnya dalam pelaksanaan hitungan leasquare matrik rotasi untuk sudut yang sangat kecil bisa dipecah sebagai berikut:
𝑅 = (𝐼 + 𝑈) = [
1 0 0 0 1 0 0 0 1
] + [
0 𝜔𝑧 −𝜔𝑦
−𝜔𝑧 0 𝜔𝑥
𝜔𝑦 −𝜔𝑥 0
]
Sehingga dalam persamaannya menjadi:
[ 𝑋 𝑌 𝑍
] = [ 𝑡𝑥 𝑡𝑦 𝑡𝑧
] + (1 + 𝑑𝑠)(𝐼 + 𝑈) [ 𝑥 𝑦 𝑧
]
= (𝐼 + 𝑈) [ 𝑥 𝑦 𝑧
] + 𝑑𝑠 (𝐼 + 𝑈) [ 𝑥 𝑦 𝑧
] + [ 𝑡𝑥 𝑡𝑦 𝑡𝑧
]
= 𝑅 [ 𝑥 𝑦 𝑧
] + 𝑑𝑠 𝐼 [ 𝑥 𝑦 𝑧
] + 𝑑𝑠 𝑈 [ 𝑥 𝑦 𝑧
] + [ 𝑡𝑥 𝑡𝑦 𝑡𝑧 ] Kemudian untuk keperluan praktis dinyatakan sebagai berikut:
[ 𝑋 𝑌 𝑍
] = 𝑅 [ 𝑥 𝑦 𝑧
] + 𝑑𝑠 [ 𝑥 𝑦 𝑧
] + [ 𝑡𝑥 𝑡𝑦 𝑡𝑧
]
= [
1 𝜔𝑧 −𝜔𝑦
−𝜔𝑧 1 𝜔𝑥
𝜔𝑦 −𝜔𝑥 1
] [ 𝑥 𝑦 𝑧
] + 𝑑𝑠 [ 𝑥 𝑦 𝑧
] + [ 𝑡𝑥 𝑡𝑦 𝑡𝑧
]
𝑋= x+ y 𝜔𝑋− z𝜔𝑌+ x𝑑𝑠 + 𝑡𝑥 𝑌= −x 𝜔𝑍+ y+ z𝜔𝑋+ y𝑑𝑠 + 𝑡𝑦
𝑍= x 𝜔𝑌− y 𝜔𝑋+ z+ z𝑑𝑠 + 𝑡𝑍
Dimana 𝑡𝑋,𝑡𝑌,𝑡𝑍merupakan 3 parameter translasi, 𝜔𝑋, 𝜔𝑌, 𝜔𝑍merupakan 3 parameter rotasi, dan ds merupakan parameter faktor skala. Jadi total untuk transformasi 3D dengan menggunakan model matematik Bursa-Wolf ini dibutuhkan 7 parameter transformasi. Dalam hal ini jumlah titik-titik sekutu yang diikutsertakan dalam penentuan parameter transformasi koordinat SRGI2013 (Kerangka Referensi Global ITRF 2008 Epoch 2005) ke SRGI2013 (Kerangka Referensi Global ITRF 2014 Epoch 2010) berjumlah 111 titik sekutu terdiri dari core IGS, stasiun IGS di wilayah regional Indonesia, dan stasiun Ina-CORS. Tabel 1 merupakan parameter transformasi dari SRGI2013 ITRF2008/IGS08 epoch 2012.0 ke SRGI2013 ITRF2014/IGb14 epoch 2012.0 yang diperoleh dari perhitungan di atas.
6
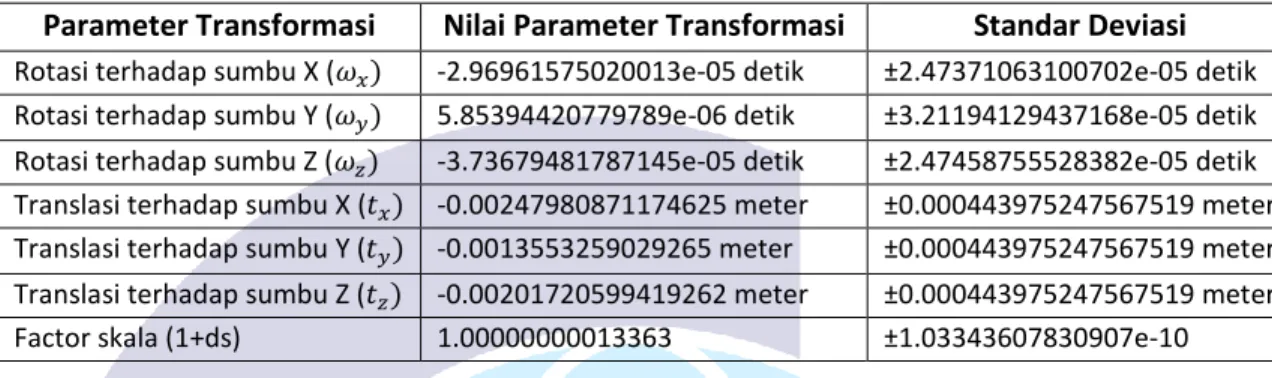
Tabel 1. Parameter transformasi koordinat dari SRGI2013 ITRF2008/IGS08 ke SRGI2013 ITRF2014/IGb14
Parameter Transformasi Nilai Parameter Transformasi Standar Deviasi Rotasi terhadap sumbu X (𝜔𝑥) -2.96961575020013e-05 detik ±2.47371063100702e-05 detik Rotasi terhadap sumbu Y (𝜔𝑦) 5.85394420779789e-06 detik ±3.21194129437168e-05 detik Rotasi terhadap sumbu Z (𝜔𝑧) -3.73679481787145e-05 detik ±2.47458755528382e-05 detik Translasi terhadap sumbu X (𝑡𝑥) -0.00247980871174625 meter ±0.000443975247567519 meter Translasi terhadap sumbu Y (𝑡𝑦) -0.0013553259029265 meter ±0.000443975247567519 meter Translasi terhadap sumbu Z (𝑡𝑧) -0.00201720599419262 meter ±0.000443975247567519 meter Factor skala (1+ds) 1.00000000013363 ±1.03343607830907e-10
Nilai parameter rotasi dan translasi terhadap sumbu x,y,z sangat kecil (mendekati nilai 0), sedangkan nilai faktor skala mendekati nilai 1, hal ini menunjukkan bahwa SRGI2013 ITRF08/IGS08 memiliki orientasi sumbu koordinat dan origin yang sama/berdekatan dengan SRGI2013 ITRF2014/IGb14. Berikut ini adalah sebaran titik sekutu yang digunakan dan nilai residu yang didapatkan untuk memperlihatkan kualitas dari parameter transformasi koordinat yang dihasilkan.
Gambar 6. Sebaran titik sekutu yang digunakan
7
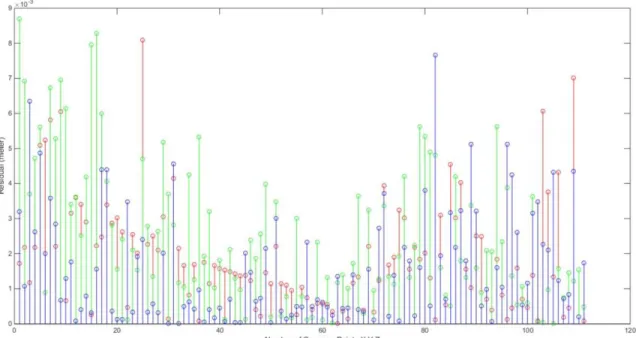
Gambar 7. Nilai residu koordinat hasil transformasi dari SRGI2013 ITRF2008/IGS08 epoch 2012.0 ke SRGI2013 ITRF2014/IGb14 epoch 2012.0 dengan koordinat hasil hitungan SRGI2013
ITRF2014/IGb14 epoch 2012.0. Merah Δ𝑋, hijau Δ𝑌, dan Biru Δ𝑍
Berdasarkan hitungan, rata-rata nilai residu pada komponen 𝑋 sebesar 0.0018 mm, nilai maksimum residu pada komponen 𝑋 sebesar 0.008 mm, nilai rata-rata residu pada komponen 𝑌 sebesar 0.0024 mm, nilai maksimum residu pada komponen 𝑌 sebesar 0.0087 mm, nilai rata-rata residu pada komponen 𝑍 sebesar 0.0015, dan nilai maksimum residu pada komponen 𝑍 sebesar 0.0076 mm. Nilai residu yang sangat kecil ini menunjukan kualitas parameter transformasi yang dihasilkan dari proses perataan kuadrat terkecil sangat baik.
3. Transformasi geodetic-geosentrik
Konversi ini merupakan salah satu bentuk transformasi dari posisi titik pada bidang lengkung, untuk dinyatakan pada bidang mendatar pada ruang (3D).
Transformasi koordinat geodetic ke geosentrik dihitung menggunakan model transformasi Hirvonen-Moritz sebagai berikut:
X = (N+H) Cos L Cos B Y = (N+H) Cos L Sin B Z = [ N (1 – e2) + H] Sin L Dimana,
X,Y,Z : koordinat geosentrik L,B,H : koordinat geodetic
N : jari-jari normal ellipsoid melalui titik obyek. 𝑁 = 𝑎
√1−𝑒2𝑆𝑖𝑛2 𝐿
e2 (eksentrisitas) = 𝑎2𝑎 − 𝑏2 2 = 2f -f2
8
Transformasi koordinat geosentrik ke geodetic dihitung menggunakan model transformasi Bowring sebagai berikut:
B = Tan-1 (𝑋𝑌)
L = Tan-1 (𝑍+𝑒′2 𝑏 𝑠𝑖𝑛3𝜃
𝑝 − 𝑒2 𝑎 𝑐𝑜𝑠3𝜃) H = 𝐶𝑜𝑠 𝐿𝑝 – N
Dimana,
X,Y,Z : koordinat geosentrik L,B,H : koordinat geodetic
𝜃 : Lintang reduksi = Tan-1 (𝑎.𝑍𝑏.𝑝)
p : Jari-jari lengkung parallel = √𝑋2+ 𝑌2 4. Transformasi geodetic-UTM
Berikut hal-hal yang perlu diperhatikan dalam melakukan transformasi Geodetik – UTM:
a. Tiap Zona memiliki sistem koordinat sendiri
b. Titik nol pada perpotongan meridian tengah dengan ekuator (titik nol semu) c. Absis semu = 500000 m pada meridian tengah
d. Ordinat semu 0 m di ekuator untuk titik-titik di utara ekuator 10000000 m di ekuator untuk titik-titik di bagian selatan ekuator
Algoritma untuk konversi koordinat geodetic ke UTM menurut RM. Toms adalah sebagai berikut:
𝑋 = 𝐹𝐸 + 𝑘0 . 𝑁 [𝐴 + (1 − 𝑇 + 𝐶) 𝐴3
6 + (5 − 18𝑇 + 𝑇2+ 72𝐶 − 58𝜀′2)𝐴5 120
]
𝑌 = 𝐹𝑁 + 𝑘0 . 𝑀 . 𝑡𝑎𝑛𝜙 (𝐴2/2 + (5 − 𝑇 + 9𝐶 + 4𝐶2) 𝐴4/24 + (61 − 58𝑇 + 𝑇 + 600𝐶 − 330𝜀′2)𝐴6/720) dimana,
FE = awal absis = 500.000 FN = awal ordinat = 10.000.000
k0 = factor skala pada meridian tengah = 0,9996 A = (λ-λo)cos φ
T = tan2 φ C = 𝜀′2 cos2 φ
λ = longitude dalam radian = latitude x π 180
φ = latitude dalam radian = longitude x π 180
λo = referensi longitude untuk zona pada meridian pusat = longitude 6 𝑥 6 + 3, hasil longitude 6 dibulatkan ke bawah λo = referensi longitude dalam radian longitude 6
9
M = jarak sebenarnya antara garis bujur dengan garis khatulistiwa = a (Ao φ – A2 sin 2φ + A4 sin 4φ – A6 sin 6φ)
Dimana,
Ao = 1- 𝜀2/4 - 3 𝜀4/64 - 5𝜀6/256 A2 = 3𝜀2/8 + 3𝜀4/32 + 45 𝜀6/1024 A4 = 15𝜀4/256 + 45 𝜀6/1024 A6 = 35 𝜀6/3072
N = jari-jari rumah yang tegak lurus dengan garis bujur = 𝑎
√(1−𝑒2𝑠𝑖𝑛𝜙2
a = semi mayor poros bumi = 6.378.137 e = eccentricity = 0,081819191
𝜀 = persamaan kuadrat eccentricity = 0,006739496768
Referensi
Bowring, B., 1976. Transformation from spatial to geographical coordinates. Survey Review, XXIII, 181:
323-327.
Deakin, R. E. 2006. A Note on The Bursa-Wolf and Molodensky-Badekas Transformation. School of Mathematical & Geospatial Sciences. RMIT University.
Hirvonen, R., A. and Moritz, H. 1963. Practical Computation of Gravity at High Altitudes. Reports of the Institute of Geodesy, Photogrammetry and Cartography, Report No. 27. The Ohio State University Research Foundation Columbus, Ohio.
Toms, R., M. 1996. Efficient Transformastions from Geodetic to UTM Coordinate Systems. Fifteenth Workshop o Standards for the Interoperability of Distributed Simulations Orlando, FL.