17
BAB III PERANCANGAN
3.1 Umum
Rancang bangun sistem sistem keamanan parkir berdasarkan zona area via GPS menggunakan MANET merupakan komunikasi jaringan wireless yang dirancang menggunakan modul transceiver long range lora SX1278 pada setiap sistem, dilengkapi GPS dan kontroler ATMEGA64 pada node untuk membaca lokasi dan pengiriman data. Penerima menggunakan PC untuk menampilkan peta digital googlemaps dan untuk proses komunikasi antara perangkat MANET agar data dapat terjangkau jauh diseluruh area yang dikover.
3.2 Blok Diagram
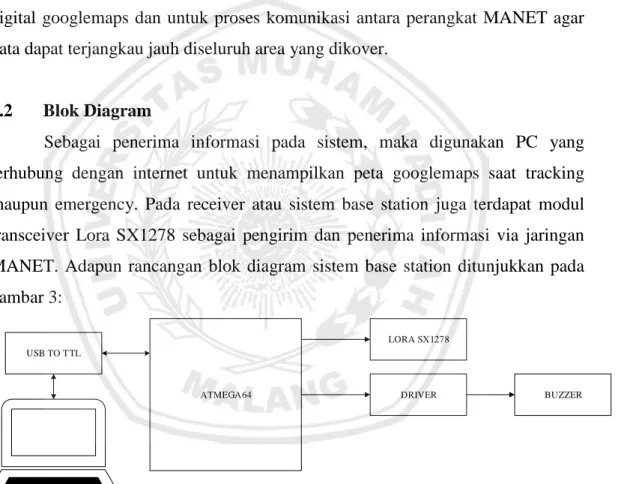
Sebagai penerima informasi pada sistem, maka digunakan PC yang terhubung dengan internet untuk menampilkan peta googlemaps saat tracking maupun emergency. Pada receiver atau sistem base station juga terdapat modul transceiver Lora SX1278 sebagai pengirim dan penerima informasi via jaringan MANET. Adapun rancangan blok diagram sistem base station ditunjukkan pada gambar 3:
ATMEGA64
LORA SX1278 USB TO TTL
DRIVER BUZZER
Gambar 3.1 Blok Diagram Sistem Base station Sumber : Perancangan
18 3.3 Prinsip Kerja
Prinsip kerja dari sistem pengamanan kendaraan berdasarkan area zona parkir dengan jaringan MANET mengacu pada ilustrasi sebagaimana gambar 3.2 berikut:
Gambar 3.2. Ilustrasi Penerapan Sistem di Lapangan
Pada gambar 3.2, denah kampus UMM mempunyai 3 lokasi parkiran, sehingga pada kondisi awal pengaturan kordinat untuk area coverage kampus UMM harus ditentukan terlebih dahulu agar sistem dapat mendeteksi apakah kendaraan berada dalam area coverage atau tidak, dengan demikian kendaraan dapat parkir di lokasi parkir mana saja (parkir 1, 2 atau 3) dan dinyatakan aman jika berada dalam lokasi tersebut. jika berada di luaar area kampus, system akan menonaktifkan kendaraan karena berada diluar zona kampus dan dianggap indikasi pencurian, kecuali user mengaktifkan mode normal alarm saat meninggalkan lokasi. Mode alarm diaktifkan menggunakan switch rahasia yang hanya diketahui oleh pemilik kendaraan.
Rancangan sistem terdiri dari 3 unit sistem, yaitu 1 unit Base station yang berada di pos pantau dan 2 unit Node pada dua kendaraan. Pada sistem Base Station selalu terhubung dengan internet guna mengakses google maps. Sementara itu untuk sistem node terdiri dari alat yang dilengkapi dengan catu daya backup baterai serta dilengkapi GPS, sensor mesin, sensor kontak serta switch pengaktif mode
Parkir 2
Parkir 1
Parkir 3 Pos Pantau
19 alarm dan sistem node ini berada pada kendaraan dan selalu aktif melakukan tracking atau proses emergency saat terjadi pencurian pada saat mode alarm sedang aktif. Pada kondisi mode alarm pada node, maka sistem pemantauan akan dilakukan oleh base station saat jangkauan pemancar diterima oleh base station. Pada proses ini sistem node mengirimkan informasi lokasi berdasarkan data GPS yang diterima pada sistem node (kendaraan), sehingga kordinat lokasi kendaraan (node) dapat ditampilkan lokasinya pada googlemaps. Pada kondisi ini saat terjadi pencurian dalam mode alarm sedang aktif, dimana switch diaktifkan pada mode alarm, maka base station akan menghitung jarak radius kendaraan terhadap zona lokasi yang ditentukan dalam zona parkir area berdasarkan kordinat. Jika kendaraan keluar dari zona area yang ditentukan berdasarkan hasil pembacaan GPS, maka base station akan memberikan peringatan berupa informasi pada layar mengenai lokasi GPS dan membunyikan buzzer pada base station. Selanjutnya base station mengirimkan informasi penonaktifan system pada node, dimana pada proses ini base station mengirimkan informasi melalui pemancar untuk menonaktifkan mesin kendaraan, sehingga kendaraan yang dikontrol oleh sistem node akan menaktifkan mesin dengan memutus jalur kontak serta membunyikan alarm pada kendaraan tersebut.
Dengan kondisi tersebut, maka kendaraan akan secara otomatis dimatikan dan pada system base station ditampilkan informasi lokasi tempat dinonaktifkannya kendaraan akibat kasus pencurin tersebut sehingga dapat ditangani dan dicegah oleh pihak security. Pada kondisi ini sistem bekerja menggunakan protocol sistem MANET, dimana komunikasi yang dilakukan mentransfer data atau informasi secara langsung ataupun berderet. Saat kendaraan berada diluar jangkauan Base station, maka system node lain (kendaraan lain ) yang berada pada jangkauannya akan menerima pesan dan mengirimkan ulang informasi tersebut ke pusat pemantau (base station) sehingga jangkauan area lebih luas.
3.4 Perancangan Perangkat Keras (Hardware) 3.4.1 Perancangan Wireless Lora SX1278
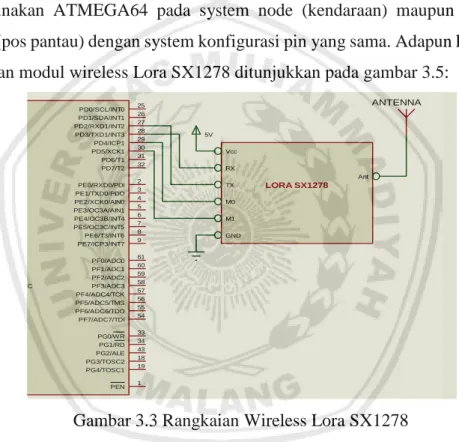
Untuk dapat mengirim dan menerima informasi jarak jauh, maka diperlukan modul wireless. Adapun modul wireless yang digunakan pada perancangan ini menggunakan lora SX1278 dengan sistem komunikasi serial. Berdasarkan
20 daasheet, pin yang digunakan terdiri dari 6pin yaitu RX, TX M0, M1, Vcc dan Ground. Sementara itu pada perancangannya atmega menggunakan UART1 untuk komunikasi serial (UART) pada modul lora SX1278. Untuk pin M0 dan M1 digunakan sebagai pengatur mode dan konfigurasi yang digunakan dalam mengakses modul, dimana frekwensi dapat diseting pada kisaran 430Mhz dan 441Mhz. Modul ini juga dilengkapi dengan sistem immunitas interference berdasarkan datasheet dan diklaim mampu melakukan komunikasi dengan jarak 3 Km hingga 6Km dengan daya 100mW sehingga cocok digunakan pada system komunikasi jarak jauh sebaaimana perancangan ini. Modul lora dikontrol menggunakan ATMEGA64 pada system node (kendaraan) maupun pada base station (pos pantau) dengan system konfigurasi pin yang sama. Adapun konfigurasi rangkaian modul wireless Lora SX1278 ditunjukkan pada gambar 3.5:
Gambar 3.3 Rangkaian Wireless Lora SX1278 Sumber : Perancangan
3.4.2 Perancangan USB to serial Converter
Agar dapat saling berkomunikasi serial antara PC dengan mikrokontroller ATMEGA64, maka diperlukan rangkaian Converter USB ke serial TTL sehingga data yang diterima dapat diolah melalui PC. Adapun perancangan dari rangkaian Converter USB to serial dirancang menggunakan modul USB to TTL CP2102 sebagaimana ditunjukkan pada Gambar 3.6 :
Vcc RX
TX
M0 5V
LORA SX1278
GND
ANTENNA
Ant
M1 PE0/RXD0/PDI 2
PE1/TXD0/PDO 3 PE2/XCK0/AIN0 4 PE3/OC3A/AIN1 5 PE4/OC3B/INT4 6 PE5/OC3C/INT5 7 PE6/T3/INT6 8 PE7/ICP3/INT7 9 PB0/SS
10 PB1/SCK 11
PB2/MOSI 12
PB3/MISO 13
PB4/OC0 14
PB5/OC1A 15
PB6/OC1B 16
PB7/OC2/OC1C 17
PG3/TOSC2 18 PG4/TOSC1 19 RESET
20
XTAL2 23 XTAL1 24
PD0/SCL/INT0 25 PD1/SDA/INT1 26 PD2/RXD1/INT2 27 PD3/TXD1/INT3 28 PD4/ICP1 29 PD5/XCK1 30 PD6/T1 31 PD7/T2 32
PG0/WR 33 PG1/RD 34 PC0/A8
35 PC1/A9 36
PC2/A10 37
PC3/A11 38
PC4/A12 39
PC5/A13 40
PC6/A14 41
PC7/A15
42 PG2/ALE 43
PA7/AD7 44 PA6/AD6 45 PA5/AD5 46 PA4/AD4 47 PA3/AD3 48 PA2/AD2 49 PA1/AD1 50 PA0/AD0 51
PF7/ADC7/TDI 54 PF6/ADC6/TDO 55 PF5/ADC5/TMSPF4/ADC4/TCKPF3/ADC3PF2/ADC2PF1/ADC1PF0/ADC0 565758596061
62 AREF 64 AVCC
PEN 1
U4
ATMEGA128
21 Gambar 3.4 Modul Converter USB to TTL
Sumber: FTDICHIP
Pada perancangan ini modul USB to TTL telah dilengkapi dengan input output serial interface standard dalam level TTL, sehingga pada level TTL tersebut data serial dapat langsung dihubungkan ke RX TX ATMEGA64. Dengan demikian, PC dapat melakukan komunikasi data serial dari perangkat lunak PC menuju mikokontroller ATMEGA64.
3.4.3 Perancangan Rangkaian Driver Buzzer
Pada perancangan ini Buzzer yang digunakan mempunyai tegangan suplay sebesar 12VDC, sementara itu tegangan sistem ATMEGA64 yang bertindak sebagai pengendali Buzzer adalah 5V, maka untuk mengontrol Buzzer diperlukan rangkaian Driver yang pada rancangan ini menggunakan perantara Optocoupler sebagai pemisah beda tegangan antara rangkaian driver Buzzer dan minimum sistem ATMEGA64. Pada perencanaan Driver Buzzer dari alat yang akan dirancang, Buzzer yang digunakan mempunyai resistansi coil sekitar 50Ω dan membutuhkan catu daya sebesar 12Volt DC, dengan demikian, maka arus yang diperlukan Buzzer adalah :
I = Rcoil Buzzer VCC
_ =
50
12 = 0,24 Amper.
Sementara itu perancangan rangkaian driver Buzzer ditunjukkan dalam Gambar 3.6:
22 Gambar 3.5 Rangkaian Driver Buzzer
Sumber : Perancangan
Alasan pengunaan IC optocoupler ini adalah untuk pengisolasian rangkaian kontrol dengan beban supaya tidak terjadi gangguan pada saat sistem bekerja.
Dalam rangkaian ini juga terdapat dioda yang berfungsi untuk melewatkan arus balik Coil Buzzer pada saat perubahan kondisi dari keadaan ON ke OFF supaya tidak merusak transistor ( 2N2222 ). Dioda yang digunakan sebaiknya yang mempunyai kemampuan melewatkan arus lebih besar dari besarnya arus balik Coil Buzzer yang akan melewatinya.
Transistor yang digunakan sebagai driver dipilih dengan pertimbangan arus collector maksimum yang besarnya 3 kali. Dengan kebutuhan arus tersebut maka dipilih transistor type 2N2222A sebagai driver Buzzer. Dari datasheet diketahui bahwa transistor tipe 2N2222A memiliki arus kolektor sebesar 800mA. Dalam perencanaannya kedua transistor ( 2N2222A) didarlington untuk penguatan yang besar yakni perkalian dari penguatan kedua transistor tersebut. Ditetapkan drop tegangan pada Vce opto = 1V (saturation).
Maka R2 atau RB dapat dicari dengan rumus:
Rb=
Ib
Vbe opto
Vce
Vcc− ( )−2.
Dimana Ib= Ic_opto
Untuk Ic dapat dicari dengan menetapkan berapa Ib / β dari tiap- tiap transistor.
Ic= Ib. (β1. β2)
R1 270
6 5
4 1
2 U2
OPTOCOUPLER-NPN R2 27K
Q1 PN2222
Q2 PN2222 D1
DIODE 12V
BUZ1
BUZZER 5V
PE0/RXD0/PDI 2 PE1/TXD0/PDO 3 PE2/XCK0/AIN0 4 PE3/OC3A/AIN1 5 PE4/OC3B/INT4 6 PE5/OC3C/INT5 7 PE6/T3/INT6 8 PE7/ICP3/INT7 9 PB0/SS
10 PB1/SCK 11
PB2/MOSI 12
PB3/MISO 13
PB4/OC0 14
PB5/OC1A 15
PB6/OC1B 16
PB7/OC2/OC1C 17
PG3/TOSC2 18 PG4/TOSC1 19 RESET
20
XTAL2 23 XTAL1 24
PD0/SCL/INT0 25 PD1/SDA/INT1 26 PD2/RXD1/INT2 27 PD3/TXD1/INT3 28 PD4/ICP1 29 PD5/XCK1 30 PD6/T1 31 PD7/T2 32
PG0/WR 33 PG1/RD 34 PC0/A8
35 PC1/A9 36
PC2/A10 37
PC3/A11 38
PC4/A12 39
PC5/A13 40
PC6/A14 41
PC7/A15
42 PG2/ALE 43
PA7/AD7 44 PA6/AD6 45 PA5/AD5 46 PA4/AD4 47 PA3/AD3 48 PA2/AD2 49 PA1/AD1 50 PA0/AD0 51
PF7/ADC7/TDI 54 PF6/ADC6/TDO 55 PF5/ADC5/TMSPF4/ADC4/TCKPF3/ADC3PF2/ADC2PF1/ADC1PF0/ADC0 565758596061
62 AREF 64 AVCC
PEN 1 U5
ATMEGA64
23 Sedangkan Iint dapat dicari dengan :
Iint=
int R
Vcc
Untuk semua perencanaannya dapat dilihat sebagai berikut:
Dalam pengukuran diketahui Rint= 50 Ω, Maka:
Iint=
50
12V = 0,24 A= 240mA
Maka harus dicari transistor yang mempunyai Ic lebih besar dari Iint. Untuk itu dipilih transistor 2N2222A yang memiliki Ic = 800mA.
Karena Ib2 = Ic TR1, Maka:
Ic TR1=
2 IcTR
= 50 800mA
= 0,016A
Ib TR1=
1 IcTR
= 50 016 ,
0 A
= 0,00032A
Maka dapat dicari nilai Rb dengan rumus:
Rb =
1 2 ) ( IbTR
Vbe opto
Vce
Vcc− −
= A
V 00032 , 0
) 3 , 1
* 2 3 , 0 12
( − −
= A
V 00032 , 0
1 ,
9 = 28437 Ω ≈ 27KΩ (harga R dipasaran)
Untuk nilai Rpull_up dapat dicari dengan rumus:
R1 = Iol
Vd Vcc −
Dimana nilai Vd sama dengan 1- 1,5 V dan Iol sebesar 16mA Maka R1 =
mA V 16
) 5 , 1 5
( − = 221.87Ω ≈ 270Ω
sehingga didapat nilai R1 = 270Ω.
24 3.4.4 Perancangan Rangkaian Keseluruhan
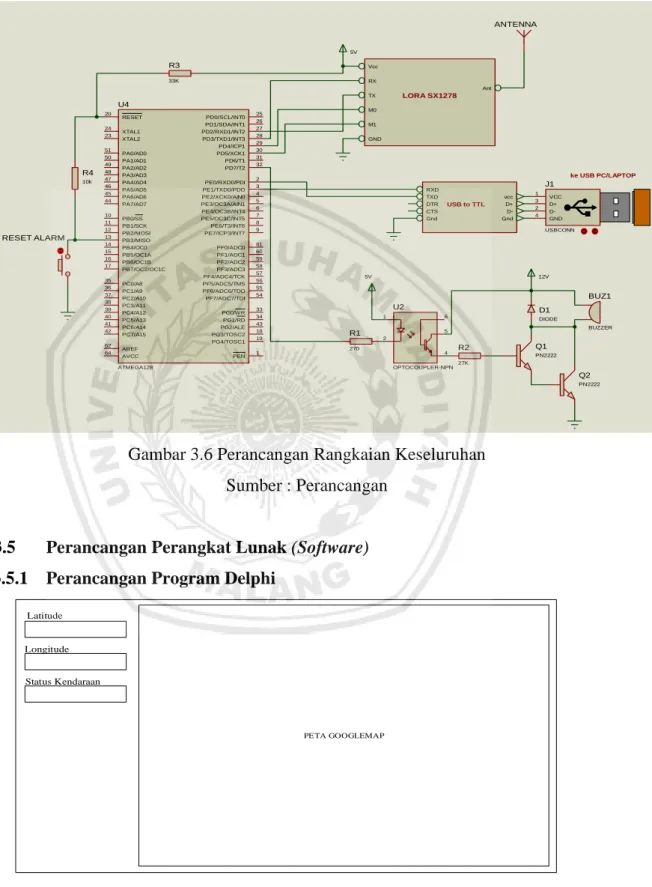
Berdasarkan hasil perancangan masing-masing bagian pada perangkat keras, maka rangkaian keseluruhan ditunjukkan sebagaimana Gambar 3.6:
Gambar 3.6 Perancangan Rangkaian Keseluruhan Sumber : Perancangan
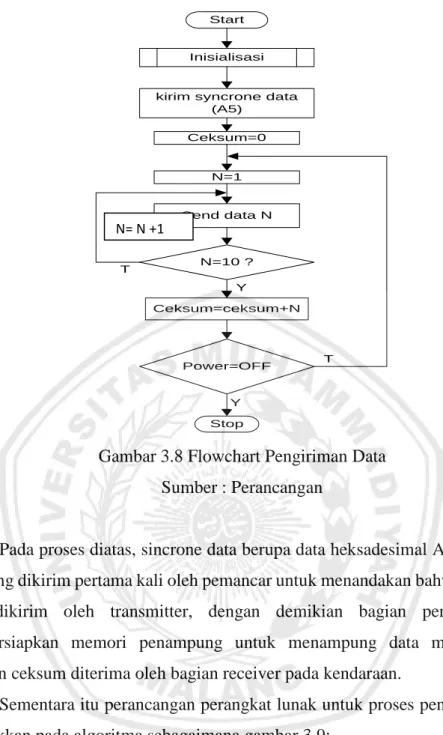
3.5 Perancangan Perangkat Lunak (Software) 3.5.1 Perancangan Program Delphi
PE TA GOOGLEMAP Latitude
Longitude
Status Kendaraan
Gambar 3.7 Perancangan Program Delphi Sebagai Penampil Googlemap
1 VCC 3 D+
2 D- 4 GND
J1
USBCONN vcc
D+
D- Gnd USB to TTL RXD TXD
Gnd
ke USB PC/LAPTOP
DTR CTS
R1 270
6 5
4 1
2 U2
OPTOCOUPLER-NPN R2 27K
Q1 PN2222
Q2 PN2222 D1 DIODE 12V
BUZ1
BUZZER 5V
Vcc RX TX M0 5V
LORA SX1278
GND
ANTENNA
Ant
M1
PE0/RXD0/PDI 2 PE1/TXD0/PDO 3 PE2/XCK0/AIN0 4 PE3/OC3A/AIN1 5 PE4/OC3B/INT4 6 PE5/OC3C/INT5 7 PE6/T3/INT6 8 PE7/ICP3/INT7 9 PB0/SS
10 PB1/SCK 11
PB2/MOSI 12
PB3/MISO 13
PB4/OC0 14
PB5/OC1A 15
PB6/OC1B 16
PB7/OC2/OC1C 17
PG3/TOSC2 18 PG4/TOSC1 19 RESET
20
XTAL2 23 XTAL1 24
PD0/SCL/INT0 25 PD1/SDA/INT1 26 PD2/RXD1/INT2 27 PD3/TXD1/INT3 28 PD4/ICP1 29 PD5/XCK1 30 PD6/T1 31 PD7/T2 32
PG0/WR 33 PG1/RD 34 PC0/A8
35 PC1/A9 36
PC2/A10 37
PC3/A11 38
PC4/A12 39
PC5/A13 40
PC6/A14 41
PC7/A15
42 PG2/ALE 43
PA7/AD7 44 PA6/AD6 45 PA5/AD5 46 PA4/AD4 47 PA3/AD3 48 PA2/AD2 49 PA1/AD1 50 PA0/AD0 51
PF7/ADC7/TDI 54 PF6/ADC6/TDO 55 PF5/ADC5/TMSPF4/ADC4/TCKPF3/ADC3PF2/ADC2PF1/ADC1PF0/ADC0 565758596061
62 AREF 64 AVCC
PEN 1 U4
ATMEGA128 R3 33K
RESET ALARM R4 10k
25 Perancangan Delphi dibuat untuk menampilkan peta googlemap dengan terhubung dengan internet. Pada gambar 3.7, perancangan panel sebelah kiri dibuat tampilan mengenai posisi dan kondisi kendaraan, yaitu Latitude yang menunjukkan lintang, Longitude menunjukkan garis bujur, dan Status Kendaraan yang berfungsi menampilkan informasi kondisi kendaraan yang dikirim oleh perangkat Node.
3.5.2 Bascomm AVR
Perangkat Lunak pada perancangan alat ini dibangun menggunakan bahasa Basic dengan compiler BASCOMM AVR. Keseluruhan maupun perangkat lunak untuk mengakses bagian-bagian dari sistem diatur didalam ATMEGA64. Adapun alur program/perangkat lunak pada proses dari masing-masing bagian blok diagram mengacu pada perancangan flowchart sebagaimana berikut:
3.5.2.1 Algoritma pengiriman data lora SX1278
Prinsip kerja dari proses pengiriman data pada lora SX1278 menggunakan protokol data serial dengan urutan data yang diakhiri dengan ceksum, protocol ini bertujuan untuk proses kelancaran komunikasi dan menghindari gangguan karena efek nois dari luar seperti gangguan dari pemancar lain. Dengan menggunakan protocol data, maka jumlah data yang dikirim via pemancar dapat dilakukan pengecekan oleh bagian penerima. Adapun perancagan perangkat lunak pada bagian pengiriman data ditunjukkan pada flowchart sebagaimana Gambar 3.14 :
26
Start
Inisialisasi
kirim syncrone data (A5)
N=1
Send data N
N=10 ?
Power=OFF
Stop Y T
T Ceksum=ceksum+N
Y Ceksum=0
Gambar 3.8 Flowchart Pengiriman Data Sumber : Perancangan
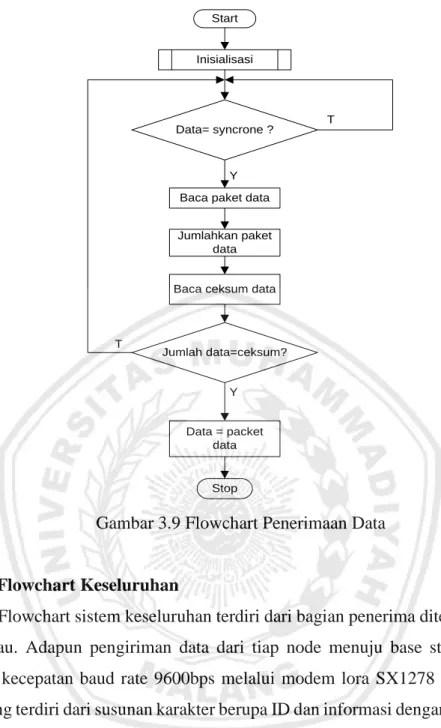
Pada proses diatas, sincrone data berupa data heksadesimal A5 merupakan data yang dikirim pertama kali oleh pemancar untuk menandakan bahwa paket data akan dikirim oleh transmitter, dengan demikian bagian penerima akan mempersiapkan memori penampung untuk menampung data masuk hingga bilangan ceksum diterima oleh bagian receiver pada kendaraan.
Sementara itu perancangan perangkat lunak untuk proses penerimaan data ditunjukkan pada algoritma sebagaimana gambar 3.9:
N= N +1
27
Start
Inisialisasi
Data= syncrone ?
Baca paket data
Jumlahkan paket data
Baca ceksum data
Jumlah data=ceksum?
Y
T
Data = packet data
Y T
Stop
Gambar 3.9 Flowchart Penerimaan Data
3.5.2.2 Flowchart Keseluruhan
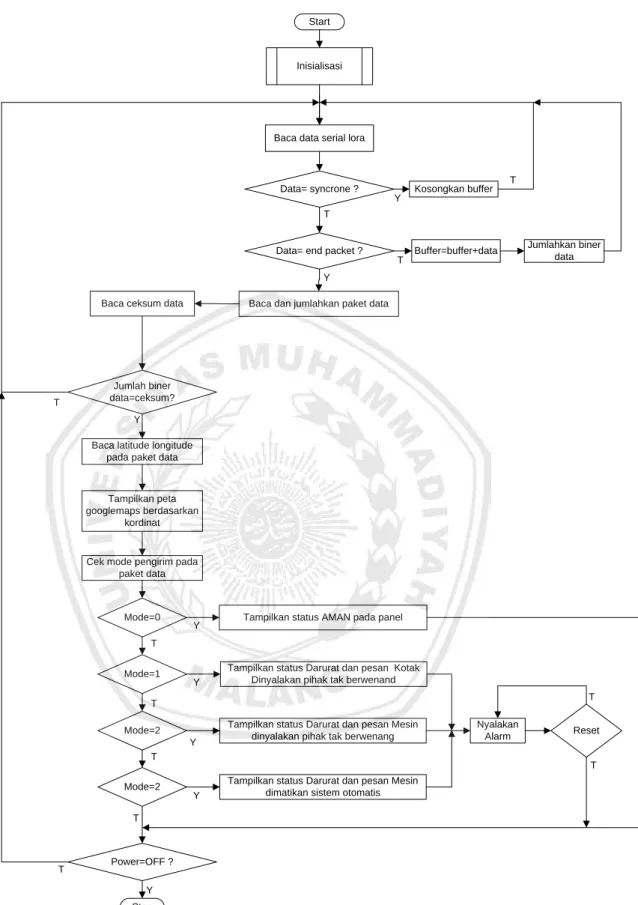
Flowchart sistem keseluruhan terdiri dari bagian penerima ditempatkan pos pemantau. Adapun pengiriman data dari tiap node menuju base station dikirim dengan kecepatan baud rate 9600bps melalui modem lora SX1278 dengan paket data yang terdiri dari susunan karakter berupa ID dan informasi dengan format yang dikirim oleh bagian pengirim baik secara direct maupun secara berderet. Sementara itu pada bagian pemrosesan penerimaan data dilakukan dengan mengacu pada rancangan perangkat lunak sebagaimana ditunjukkan pada gambar 3.10 :
28
Start
Inisialisasi
Data= syncrone ? Baca data serial lora
Baca ceksum data
Jumlah biner data=ceksum?
T
T
Stop
T
Baca dan jumlahkan paket data
Kosongkan buffer
Data= end packet ? Buffer=buffer+data Y
Y
Jumlahkan biner T data
Y
Baca latitude longitude pada paket data
Power=OFF ? Y T
T
Tampilkan peta googlemaps berdasarkan
kordinat
Cek mode pengirim pada paket data
Mode=0 Tampilkan status AMAN pada panel Y
Mode=1 Tampilkan status Darurat dan pesan Kotak Dinyalakan pihak tak berwenand Y
T
Mode=2 Tampilkan status Darurat dan pesan Mesin dinyalakan pihak tak berwenang Y
T
Mode=2 Tampilkan status Darurat dan pesan Mesin dimatikan sistem otomatis Y
T
Nyalakan
Alarm Reset
T T
Gambar 3.10 Flowchart Keseluruhan