Fakultas Ilmu Komputer
Universitas Brawijaya
7848
Sistem Kendali Jarak Tempuh
Quadcopter
Menggunakan Metode
Proportional Integral Derivative
Enno Roscitra Oktaria1, Gembong Edhi Setyawan2, Wijaya Kurniawan3
Program Studi Teknik Komputer, Fakultas Ilmu Komputer, Universitas Brawijaya Email: 1[email protected], 2[email protected], 3[email protected]
Abstrak
Quadcopter merupakan salah satu robot Unmanned Aerial Vehicle (UAV) yang memiliki kemampuan manuver ke segala arah dan fleksibel untuk menjelajahi area yang sempit. Kemampuan tersebut dapat dioptimalkan manfaatnya dengan cara membangun sistem navigasi otomatis pada quadcopter. Salah satunya yaitu merancang sistem kendali ketepatan perpindahan posisi quadcopter menggunakan metode PID (Proportional Integral Derivative). Penalaan parameter PID menggunakan metode osilasi ziegler nichols. Dari hasil pengujian penalaan parameter PID, respon sistem berosilasi dengan stabil saat nilai 𝐾𝑢 = 0,07 dan 𝑃𝑢 = 0,092, sehingga pengendalian pergerakan dalam sudut pitch dan roll memperoleh nilai 𝐾𝑝 = 0,042; 𝐾𝑖 = 0,046; dan 𝐾𝑑 = 0,0115. Dari pengamatan pengujian ketepatan posisi, menunjukan bahwa sistem kendali menggunakan PID menghasilkan tingkat kesalahan sebesar 4,99% dan waktu yang dibutuhkan sistem untuk memasuki ±2% dari keadaan steady state atau settling time sebesar 0,4145 detik. Tingkat kesalahan dan settling time diperoleh berdasarkan rata-rata hasil pada setiap pengujian yang telah dilakukan.
Kata kunci: Sistem Navigasi, PID, UAV, Quadcopter, Jarak tempuh, Ziegler Nichols
Abstract
The Quadcopter is one of Unmanned Aerial Vehicle (UAV) robots that has the ability to maneuver in various directions and flexible to explore a narrow area. These capabilities can be optimized for the benefits by building automated navigation systems on the quadcopter. One of them is designing a precision control system of quadcopter position movement using a PID (Proportional Integral Derivative) method. Tuning of PID parameters using the Ziegler Nichols oscillation method. From the test result of PID parameter tuning, the system response oscillates stably when the value of Ku = 0,07 and Pu = 0,092, so that the movement control in the pitch and roll angle obtained Kp = 0,042; Ki = 0,046; and Kd = 0,0115. From the observation of position accuracy testing, it shows that the control system using PID yields an error rate of 4,99% and the time required for the system to enter ± 2% of the steady state or settling time of 0,4145 s. The error rate and settling time are obtained based on the average results of each test that has been done.
Keywords: Navigation System, PID, UAV, Quadcopter, Distance, Ziegler Nichlos
1. PENDAHULUAN
Quadcopter merupakan salah satu jenis robot Unmanned Aerial Vehicle (UAV) yang memiliki struktur mekanis terdiri dari empat rotor pada empat ujung persimpangan tempat baterai dipasang (Piskorski, Brulez, Eline, & D’Haeyer, 2012). Dengan empat rotor tersebut quadcopter memiliki kemampuan manuver kesegala arah dengan fleksibel. Kemampuan quadcopter tersebut dimanfaatkan oleh manusia untuk memudahkan pekerjaandalam lingkungan
Hapsari, 2015). Sehingga sistem tersebut perlu diperbaiki dengan cara membangun sistem kendali jarak tempuh quadcopter. Pengendalian ini termasuk pengendalian otomatis berdasarkan jarak tempuh yang terdiri dari gerak maju, mundur, ke kiri, dan ke kanan.
Dalam menentukan metode untuk sistem kendali jarak tempuh quadcopter merupakan suatu permasalahan tersendiri. Setyawan, Setiawan dan Kurniawan (2015) menggunakan metode PID (Proportional, Integral, Derivative) dengan parameter ketinggian. Lwin dan Tun (2014) dengan menambahkan metode Kalman Filter untuk simulasi forward moving control dan vertical moving control pada quadcopter. Hasil dari penelitian-penelitian tersebut menunjukan bahwa PID memiliki respon yang cepat sehingga dapat diterapkan dalam sistem quadcopter.
Pada penelitian ini akan membangun sistem kendali menggunakan metode PID dengan parameter jarak tempuh quadcopter. PID merupakan kontroler untuk menentukan presisi suatu sistem instrumentasi dengan karakteristik adanya umpan balik pada sistem. Output PID digunakan untuk mengatur nilai command kecepatan linear x dan kecepatan linear y pada quadcopter melalui ROS (Robot Operating System). Sedangkan setpoint pada pengendali ini yaitu nilai jarak tempuh yang diinginkan. Untuk tuning parameter PID pada penelitian ini menggunakan metode ziegler nichols dengan osilasi. Metode ziegler nichols adalah metode tuning parameter PID secara eksperimental. Metode ini didasarkan pada reaksi plant yang dikenai suatu perubahan.Sistem kendali ini akan diimplementasikan pada quadcopter jenis Parrot AR Drone 2.0.
2. PERGERAKAN QUADCOPTER
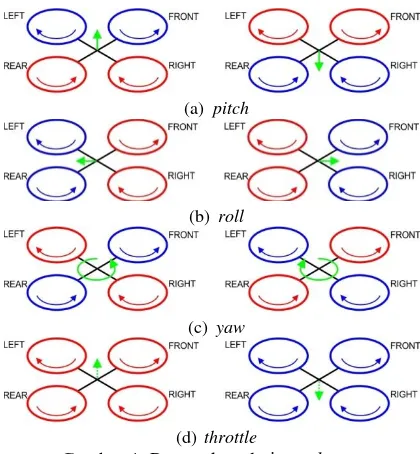
Quadcopter digerakan oleh empat buah rotor. Satu pasang rotor berputar searah jarum jam dan yang lainnya berlawanan arah jarum jam (Piskorski, et al., 2012). Dengan mengatur kecepatan putar pada setiap rotor akan menghasilkan gerakan dari quadcopter. Dalam pergerakan quadcopter sendiri memiliki beberapa istilah yaitu pitch gerakan maju dan mundur, roll gerakan ke kiri dan ke kanan, yaw gerakan berputar ke kiri dan ke kanan, dan throttle gerakan ke atas dan ke bawah. Pergerakan-pergerakan tersebut dapat dilihat pada Gambar 1.
(a) pitch
(b) roll
(c) yaw
(d)throttle
Gambar 1. Pergerakan dari quadcopter
Pada Gambar 1 kecepatan putar rotor ditunjukkan dengan warna yaitu merah menandakan semakin cepat berputar dan warna biru menandakan semakin lambat berputar. Sedangkan arah rotor ditunjukkan dengan arah panah. Gambar 1(a) menunjukkan gerak maju dan mundur, Gambar 1(b) menunjukkan gerak ke kiri dan kanan, Gambar 1(c) menunjukkan gerak berputar ke kiri dan kanan dan Gambar 1(d) menunjukkan gerak ke atas dan ke bawah.
3. KONTROLER PID
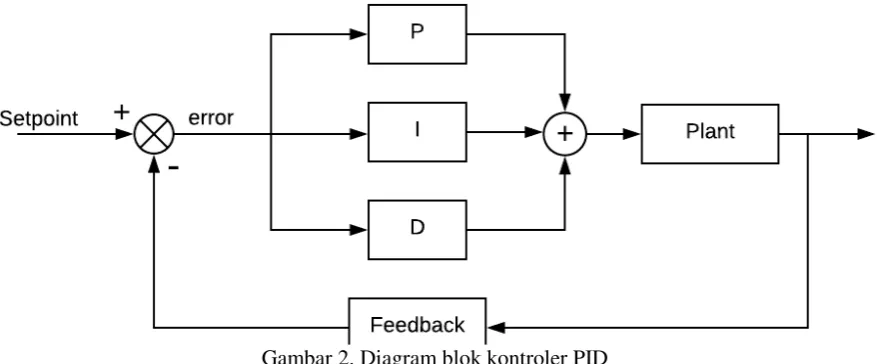
PID (Proportional Integral Derivative) merupakan kontroler untuk menentukan presisi suatu sistem instrumentasi dengan karakteristik adanya umpan balik pada sistem tesebut. Kontroler PID terdiri dari tiga jenis komponen yaitu kontrol P (Proportional), D (Derivative) dan I (Integral), dengan masing-masing memiliki kelebihan dan kekurangan. Dalam implementasinya masing-masing komponen kontrol PID dapat bekerja sendiri-sendiri maupun bersamaan tergantung dari respon yang diinginkan terhadap suatu plant seperti diagram blok dari kontroler PID yang dapat dilihat pada Gambar 2. Nilai keluaran kontroler PID atau 𝑚𝑣(𝑡) dihitung dengan Persamaan (1):
𝑚𝑣(𝑡) = 𝐾𝑝𝑒(𝑡) + 𝐾𝑖∫ 𝑒(𝑡)𝑑𝑡 + 𝐾𝑑 𝑡
0
Tabel 2. Penalaan parameter PID dengan osilasi
Tipe 𝑲𝒑 𝑻𝒊 𝑻𝒅
P 0,5 × 𝐾𝑢
PI 0,45 × 𝐾𝑢 1⁄1,2𝑃𝑢
PID 0,6 × 𝐾𝑢 0,5 × 𝑃𝑢 0,125 × 𝑃𝑢
Dengan 𝐾𝑝 menyatakan konstanta proporsional, 𝐾𝑖 menyatakan konstanta integral dan 𝐾𝑑 menyatakan konstanta deferensial. Sedangkan 𝑒(𝑡) adalah error sistem terhadap waktu dan 𝑑𝑒(𝑡) adalah delta error.
Penalaan parameter PID pada penelitian ini didasarkan terhadap dua konstanta hasil eksperimen, nilai penguatan proportional pada sistem mencapai kondisi sustain oscillation atau disebut gain 𝐾𝑢 dan periode dari sustained oscillation yang disebut periode 𝑃𝑢 (Gunterus, 1994). Metode penalaan Ziegler Nichols menyarankan penyetelan nilai parameter 𝐾𝑝 , 𝑇𝑖 , dan 𝑇𝑑 berdasarkan rumus yang diperlihatkan pada Tabel 1.
4. KOMUNIKASI SISTEM
Komunikasi sistem merupakan tahap awal dalam merealisasikan sistem pada penelitian ini. Tujuan komunikasi sistem ini untuk menghubungkan komputer dengan quadcopter agar dapat saling berkomunikasi. Cara menghubungkan komputer dengan quadcopter adalah melalui koneksi Wi-Fi. Kemudian agar dapat berkomunikasi setelah saling terhubung digunakan platform robot yaitu Robot Operating System (ROS) yang telah tertanam driver autonomy_ardrone untuk mengendalikan sistem quadcopter. Driver package tersebut memungkinkan user dapat mengakses data navigasi dari quadcopter dan mengirim perintah gerak ke quadcopter dengan menggunakan
Sending Commands yang terdapat dalam driver autonomy_ardrone. Sending Commands terdiri dari beberapa komponen dengan fungsi berbeda yang dapat dilihat pada Tabel 2.
5. IMPLEMENTASI ALGORITME PID
Kontroler PID bermaksud untuk melakukan penjumlahan dari proses-proses penguatan, pengintegralan dan penurunan nilai error dan mengeluarkan hasil perhitungan sebagai sinyal kontrol. Untuk dapat diterapkan pada sistem berdasarkan Persamaan 1, maka harus diubah ke dalam persamaan diskrit dengan mendefinisikan persamaan terhadap waktu, sehingga diperoleh pendekatan integral dan deferensial untuk mendapat bentuk diskrit, menggunakan Persamaan 2.
𝑢(𝑛) = 𝐾𝑝𝑒(𝑛) + 𝐾𝑖∑ 𝑒(𝑘) + 𝐾𝑑(𝑒(𝑛) − 𝑒(𝑛 − 1) 𝑛
𝑘=0 (2)
Algoritme PID diimplementasikan dengan cara diturunkan menjadi kode program, pada penelitian ini menggunakan bahasa pemrograman python node yang diprogram pada ROS. Pada program penelitian ini ditambahkan batasan untuk nilai Iterm atau yang disebut windup guard. Fungsi windup guard ini untuk mengatasi masalah overshoot pada sistem kendali. Pada sistem kendali ini windup guard
Komponen Fungsi
-linear.x Gerak mundur +linear.x Gerak Maju
-linear.y Gerak ke kanan +linear.y Gerak ke kiri
-linear.z Gerak turun +linear.x Gerak naik -angular.z Putar kanan +angular.z Putar kiri Gambar 2. Diagram blok kontroler PID
diatur sebesar 1 untuk batas atas dan -1 untuk batas bawah karena nilai parameter command di ROS di antara -1 dan 1. Nilai keluaran PID akan digunakan untuk mengontrol nilai command linear.x dan linear.y pada ROS yang berfungsi untuk mengatur pergerakan quadcopter agar mencapai jarak tempuh sesuai dengan yang diinginkan.
6. HASIL PENGUJIAN DAN ANALISIS
Kontroler PID digunakan untuk mengendalikan nilai parameter pitch (–linear.x dan +linear.x)dan roll (-linear.y dan +linear.y) yang memiliki range antara -1,0 hingga 1,0. Masing-masing parameter tersebut membutuhkan kontroler PID sendiri-sendiri.
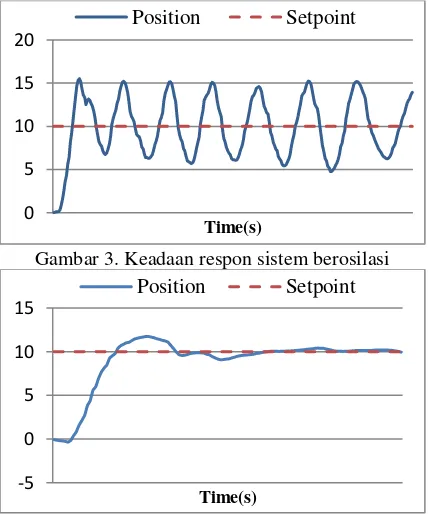
Penalaan parameter dilakukan pada sudut pitch dari quadcopter. Pada saat penalaan ini pengendali PID pada roll tidak difungsikan dan pengujian dilakukan dalam ruangan yang kecepatan anginnya rendah. Setpoint diatur sebesar 10 dm. Hasil respon sistem dalam keadaan berosilasi ketika nilai 𝐾𝑢= 0,07 dan 𝑃𝑢=0,092 yang ditunjukan oleh Gambar 3. Berdasarkan Tabel 1, dengan menggunakan tipe pengendali PID maka diperoleh 𝐾𝑝=0,042; 𝑇𝑖=0,046; 𝑇𝑑=0,0115. Dari hasil pengujian pengendali PID didapatkan respon sistem seperti pada Gambar 4 dengan settling time sebesar 0,271 detik, peak time sebesar 0,09 detik dan overshoot max sebesar 1,73 dm.
Gambar 3. Keadaan respon sistem berosilasi
Gambar 4. Respon sistem dengan pengendali PID
Selanjutnya dilakukan pengujian dengan setpoint berbeda pada setiap parameter. Setpoint ini diatur sebesar 10, 15 dan 20 dekameter. Pengujian dilakukan setelah quadcopter hover terlebih dahulu dan tempat pengujian dilakukan dalam ruangan yang kecepatan anginnya rendah.
Gambar 5. Pitch gerak maju dengan setpoint 10
Gambar 6.Pitch gerak maju dengan setpoint 15
Gambar 7.Pitch gerak maju dengan setpoint 20
Gambar 8. Pitch gerak mundur dengan setpoint 10
0 5 10 15 20
Time(s)
Position Setpoint
-5 0 5 10 15
Time(s)
Position Setpoint
-5 0 5 10 15
Time(s)
Setpoint Position
-10 0 10 20 30
Time(s)
Setpoint Position
0 10 20 30
Time(s)
Setpoint Position
-15 -10 -5 0 5
Time(s)
Gambar 9.Pitch gerak mundur dengan setpoint 15
Gambar 10.Pitch gerak mundur dengan setpoint 20
Gambar 11.Roll gerak ke kiri dengan setpoint 10
Gambar 12.Roll gerak ke kiri dengan setpoint 15
Gambar 13.Roll gerak ke kiri dengan setpoint 20
Gambar 14.Roll gerak ke kanan dengan setpoint 10
Gambar 15.Roll gerak ke kanan dengan setpoint 15
Gambar 16. Roll gerak ke kanan dengan setpoint 20 Pada Gambar 5, Gambar 6 dan Gambar 7 menunjukan hasil respon sistem dari pengujian jarak tempuh pada gerakan maju dengan setpoint sebesar 10 dam, 15 dam dan 20 dam. Gambar 8, Gambar 9, dan Gambar 10 menunjukan hasil respon sistem dari pengujian jarak tempuh pada gerakan mundur dengan setpoint 10 dam, 15 dam dan 20 dam. Gambar 11, Gambar 12, dan Gambar 13 menunjukan hasil respon sistem dari pengujian jarak tempuh pada gerakan ke kiri dengan setpoint 10 dam, 15 dam dan 20 dam. Gambar 14, Gambar 15, dan Gambar 16 menunjukan hasil respon sistem dari pengujian jarak tempuh pada gerakan ke kiri dengan setpoint 10 dam, 15 dam dan 20 dam.
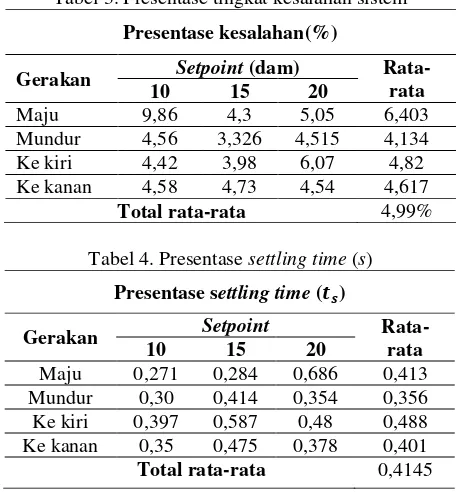
Berdasarkan hasil pengujian jarak tempuh didapatkan hasil rata-rata tingkat kesalahan sistem yang dapat dilihat pada Tabel 3 dan rata-rata waktu yang menyatakan respon telah masuk ±2% dari keadaan steady state sistem yang dapat dilihat pada Tabel 4.
-30 -20 -10 0
Time(s)
Setpoint Position
-30 -20 -10 0
Time(s)
Setpoint Position
-5 0 5 10 15
Time(s)
Setpoint Position
0 10 20 30
Time(s)
Setpoint Position
-10 0 10 20 30
Time(s)
Setpoint Position
-15 -10 -5 0
Time(s)
Setpoint Position
-30 -20 -10 0
Time(s)
Setpoint Position
-30 -20 -10 0 10
Time(s)
Tabel 3. Presentase tingkat kesalahan sistem
Presentase kesalahan(%)
Gerakan Setpoint (dam) Rata-rata 10 15 20
Maju 9,86 4,3 5,05 6,403 Mundur 4,56 3,326 4,515 4,134 Ke kiri 4,42 3,98 6,07 4,82 Ke kanan 4,58 4,73 4,54 4,617
Total rata-rata 4,99%
Tabel 4. Presentase settling time (s)
Nilai presentase dari setiap gerakan quadcopter dirata-rata kemudian dijumlahkan dengan kesalahan pada setiap setpoint yang sama lalu dirata-rata kembali hingga didapat nilai kesalahan total.
7. KESIMPULAN
Berdasarkan hasil analisis yang diperoleh melalui pengujian yang dilakukan, maka didapatkan beberapa kesimpulan sebagai berikut.
1. Dengan menggunakan metode ziegler nichols untuk penalaan parameter PID didapatkan hasil 𝐾𝑝 sebesar 0,042, 𝐾𝑖 sebesar 0,046 dan 𝐾𝑑 sebesar 0,0115.
2. Hasil pengujian jarak tempuh quadcopter dengan setpoint berbeda-beda menunjukan bahwa sistem kendali dengan menggunakan metode PID memiliki tingkat kesalahan yang rendah yaitu 4,99 %.
3. Rata-rata waktu yang dibutuhkan sistem untuk memasuki ±2% dari keadaan steady state adalah 0,4145 s.
Penelitian ini dapat dikembangkan lebih lanjut dengan memanfaatkan fungsi kamera pada quadcopter yang digunakan untuk mengecek jarak objek disekitar quadcopter agar user dapat mengatur setpoint sesuai informasi yang didapatkan melalui kamera quadcopter. Pengembangan lainnya diharapkan quadcopter dapat mengendalikan gerak diantara pitch dan roll agar mencapai jarak tempuh yang diinginkan.
8. DAFTAR PUSTAKA
Caballero, F., Martinez-de-Dios, J.R., Maza, I., 2010, Automatic Forest Fire Monitoring and Measurement Using Unmanned Aerial Vehicle, International Conference on Forest Fire Research, D.X. Viegas (Ed.)
Gunterus, F. 1994, Falsafah Dasar: Sistem Pengendalian Proses. Elex Media Komputindo, Jakarta.
Kurniawan, A. P., Mutiara, G. A. & Hapsari, G. I., 2015. Pengiriman Informasi GPS (Global Positioning System) Berupa Teks Melalui Wireless pada AR Drone 2.0. e-Proceeding of Applied Science, 1(2).
Lwin, N. & Hla Myo, T., 2014. Implementation Of Flight Control System Based On Kalman And PID Controller For UAV. INTERNATIONAL JOURNAL OF SCIENTIFIC & TECHNOLOGY RESEARCH, 3(4).
Piskorski, S., Brulez, N., Eline, P. & D’Haeyer, F., 2012. AR.Drone Developer Guide. Dalam: AR.Drone Developer Guide. s.l.:s.n.
Setyawan, G. E., Setiawan, E., Kurniawan, W., 2015. Sistem Kendali Ketinggian Quadcopter Menggunakan PID, Jurnal Teknologi Informasi dan Ilmu Komputer (JTIIK), Volume 2.
Presentase settling time (𝒕𝒔)
Gerakan Setpoint Rata-rata 10 15 20
Maju 0,271 0,284 0,686 0,413 Mundur 0,30 0,414 0,354 0,356 Ke kiri 0,397 0,587 0,48 0,488 Ke kanan 0,35 0,475 0,378 0,401