4 BAB II
TINJAUAN PUSTAKA 2.1 Penelitian Terdahulu
Penelitian ini tidak dapat dipisahkan dari penelitian-penelitian yang sudah diteliti sebelumnya. Tentunya penulis melakukan review terhadap beberapa penelitian terdahulu guna mengetahui posisi penelitian di antara berbagai penelitian terdahulu. Selain itu juga untuk menemukan berbagai perbedaan dalam pembahasan, metode penelitian, dan model alat agar terhindar dari berbagai bentuk plagiasi.
Penelitian pertama adalah Skripsi dari Roni Kusumah yang berjudul
“Rancang Bangun Sistem Pengendalian Kecepatan Putaran Motor DC Menggunakan Mode Kontrol PID Pada Alat Pembersih Kaca Berbasis ATMEGA 16A” [3]. Skripsi tersebut memiliki persamaan dengan penelitian penulis yaitu pada alat yang dibuat yaitu alat pembersih kaca. Perbedaan dengan penelitian penulis yaitu terletak pada penggunaan sensor yang dipakai yaitu sensor jarak Sharp GP2Y0A41SK0F sedangkan penelitian penulis menggunakan sensor ultrasonik HCSR04 sebagai feedbacknya.
Pada penelitian ini saya menggunakan sensor ultrasonik sebagai feedback dari mekanisme kerjanya untuk mengukur jarak agar alat dapat bekerja secara otomatis. Lalu saya menggunakan 1 buah sensor yang diletekan di samping kiri bidang alat, sedangkan penelitian Roni Kusumah menggunakan 4 sensor yang diletakan di 4 sisi. Namun pada rancang bangun ini tidak menggunakan sistem
kendali propotional integral derivative (PID) melainkan menggunakan arduino uno sebagai sistem kendalinya.
Penelitian Kedua dilakukan oleh Raj Vishaal (2018) [1] dari Singapore University of Technology and Design yang diterbitkan dalam bentuk jurnal Elsevier yang berjudul “Design of Dual Purpose Cleaning Alat”. Pada penelitian yang dilakukan Raj Vishaal alat yang diteliti menggunakan 2 macam fungsi yang berbeda, fungsi pertama yaitu membersihkan kaca dan fungsi kedua membersihkan lantai. Sistem kendali yang digunakan pada pembersihan kaca masih manual yaitu menggunakan modul Bluetooth HC-05 yang disambungkan ke dalam perangkat smartphone sehingga aplikasi pengendaliannya masih manual melalui sistem android berbentuk remote control. Lalu untuk pembersihan lantai penelitian ini sudah menggunakan sistem kendali otomatis menggunakan sensor IR yang diletakan pada 4 sisi alat.
Sedangkan pada penelitian yang saya lakukan, saya menggunakan sistem kendali otomatis pada pembersihan kaca. Sistem kendali yang saya gunakan menggunakan sensor ultrasonik yang berada diluar alat yang diletakan pada sisi kiri jendela. Sensor ultrasonik akan mengirimkan sinyal kepada mikrokontroler arduino uno sehingga ketika alat sudah sampai pada jarak yang di inginkan maka motor stepper akan bergerak untuk menggeser alat ke tempat yang belum dibersihkan.
Pada penelitian ketiga yang dilakukan oleh Bambang Sampurno (2019) [2]
dari Universitas Sepuluh Nopember yang berjudul “Distance Control Sistem to Increase Precision And Stability of Glass Cleaning Alat”. Pada penelitian yang dilakukan alat yang digunakan tidak berbeda jauh dari apa yang saya rancang.
Perbedaannya terletak pada cara sistem kendali yang dilakukan untuk menggerakan
alat yaitu dengan cara sensor mengirimkan sinyal kembali ke mikrokontroler dan di teruskan ke motor DC sedangkan penelitian saya mikrokontroller yang digunakan ada 2 yatu arduino uno dan arduino nano. Arduino uno digunakan untuk proses kendali sensor ultrasonik dan motor stepper, sedangkan arduino nano digunakan untuk proses kendali motor power window yang digunakan untuk proses naik turunnya alat.
2.2 Sistem Kendali
Sistem kendali dapat diartikan sebagai suatu proses yang tidak lagi memerlukan cara-cara konvensional atau manual untuk memperoleh hasil yang diinginkan. Sistem kontrol menggunakan persamaan matematis untuk mendapatkan hasil yang diinginkan. Sistem kendali berguna untuk mengimplementasikan suatu kemampuan manusia untuk mengendalikan sesuatu dengan menggunakan bentuk If – Then Rules, sehingga proses pengendaliannya akan mengikuti pendekatan linguistik, sistem ini disebut sistem kendali logika fuzzy [5]. Dimana sistem kendali logika fuzzy ini tidak bergantung pada variabel proses kendali.
Sistem kendali terdiri dari komponen perangkat keras atau perangkat lunak yang saling berhubungan satu sama lain sehingga dapat memerintahkan, mengarahkan dan mengatur sistemnya sendiri atau sistem lain. Segala sesuatu yang berhubungan dengan pengendalian atau control tidak dapat dipisahkan dari apa yang disebut dengan diagram blok [5]. Diagram blok ini berfungsi sebagai dasar utama untuk mempelajari suatu sistem kendali. Diagram blok dapat dikelompokkan menjadi 2 yaitu sistem Open Loop dan sistem Close Loop [3]. Perbedaannya terletak pada perilaku sistem dan pemrosesan outputnya.
2.2.1 Sistem Kontrol Open Loop
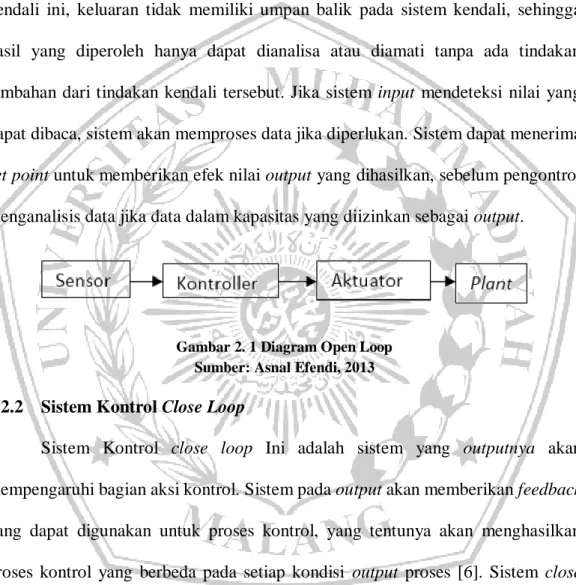
Sistem kontrol Open Loop adalah sistem kontrol yang menghasilkan output tetapi tidak memiliki pengaruh pada tindakan kontrol. Sistem Open Loop adalah sistem yang tidak memiliki umpan balik, sehingga nilai keluarannya tidak akan mempengaruhi tindakan yang akan dilakukan oleh pengontrol [3]. Pada sistem kendali ini, keluaran tidak memiliki umpan balik pada sistem kendali, sehingga hasil yang diperoleh hanya dapat dianalisa atau diamati tanpa ada tindakan tambahan dari tindakan kendali tersebut. Jika sistem input mendeteksi nilai yang dapat dibaca, sistem akan memproses data jika diperlukan. Sistem dapat menerima set point untuk memberikan efek nilai output yang dihasilkan, sebelum pengontrol menganalisis data jika data dalam kapasitas yang diizinkan sebagai output.
Gambar 2. 1 Diagram Open Loop Sumber: Asnal Efendi, 2013
2.2.2 Sistem Kontrol Close Loop
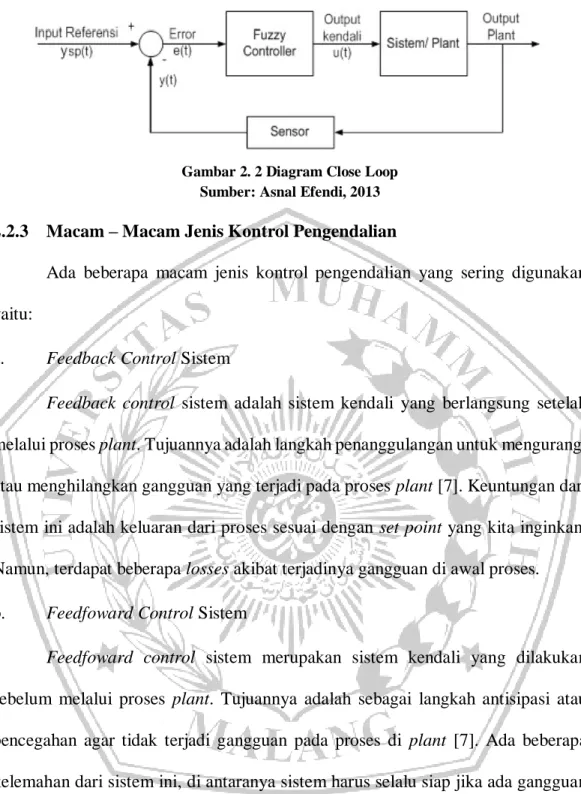
Sistem Kontrol close loop Ini adalah sistem yang outputnya akan mempengaruhi bagian aksi kontrol. Sistem pada output akan memberikan feedback yang dapat digunakan untuk proses kontrol, yang tentunya akan menghasilkan proses kontrol yang berbeda pada setiap kondisi output proses [6]. Sistem close loop merupakan proses otomatisasi, dimana siklus program akan terjadi secara terus menerus dengan presisi hasil yang sangat baik.
Gambar 2. 2 Diagram Close Loop Sumber: Asnal Efendi, 2013
2.2.3 Macam – Macam Jenis Kontrol Pengendalian
Ada beberapa macam jenis kontrol pengendalian yang sering digunakan yaitu:
a. Feedback Control Sistem
Feedback control sistem adalah sistem kendali yang berlangsung setelah melalui proses plant. Tujuannya adalah langkah penanggulangan untuk mengurangi atau menghilangkan gangguan yang terjadi pada proses plant [7]. Keuntungan dari sistem ini adalah keluaran dari proses sesuai dengan set point yang kita inginkan.
Namun, terdapat beberapa losses akibat terjadinya gangguan di awal proses.
b. Feedfoward Control Sistem
Feedfoward control sistem merupakan sistem kendali yang dilakukan sebelum melalui proses plant. Tujuannya adalah sebagai langkah antisipasi atau pencegahan agar tidak terjadi gangguan pada proses di plant [7]. Ada beberapa kelemahan dari sistem ini, di antaranya sistem harus selalu siap jika ada gangguan atau tidak sehingga menyebabkan dana membengkak. Sedangkan output proses belum tentu sesuai dengan set point. Namun, terjadinya gangguan dalam proses dapat diminimalkan secara memadai.
c. Cascade Control Sistem
Cascade control sistem merupakan gabungan antara feedback control sistem dan feedfoward control sistem sehingga diperoleh sistem komplementer dengan keluaran proses sesuai dengan set point yang diinginkan dan gangguan pada awal proses dapat diantisipasi atau diminimalkan.
2.3 Arduino
Arduino adalah mikrokontroler yang dirancang agar mudah digunakan oleh seniman dan desainer (yang bukan teknisi). Jadi, tanpa mengetahui bahasa pemrograman arduino sudah bisa digunakan untuk menghasilkan karya-karya yang canggih. Inilah yang diungkapkan Mike Schmindt. Menurut Massimo Banzi, salah satu pendiri dan pembuat arduino, arduino adalah platform perangkat keras open source dengan input / output (I/O) sederhana.
Menggunakan arduino sangat berguna untuk membuat prototype atau untuk melaksanakan proyek. Arduino menyediakan I/O tetap yang dapat digunakan dengan mudah. Arduino dapat digabungkan dengan modul kelistrikan lainnya sehingga proses perakitan jauh lebih efisien. Desainer atau pengguna hanya perlu membuat perangkat lunak untuk menggunakan desain H/D yang ada. Perangkat lunak ini jauh lebih mudah untuk dimodifikasi tanpa harus memindahkan kabel.
Keistimewaan arduino adalah perangkat kerasnya yang open source [8]. Ini memberikan banyak fleksibilitas bagi semua orang untuk bereksperimen secara bebas dan gratis.
Arduino merupakan rangkaian elektronika yang dilengkapi dengan mikrokontroler yang biasa disebut ATmega [9]. Papan Arduino dilengkapi dengan mikrokontroler dimana program dapat diisi menggunakan perangkat lunak.
Software yang digunakan pada arduino adalah Arduino IDE [10]. Mikrokontroler ATmega pada setiap board arduino memiliki tipe yang berbeda-beda tergantung dari jenis arduinonya.
Secara umum, arduino terdiri atas dua bagian utama, yaitu:
1. Bagian H/D
Berupa papan yang berisi I/O, seperti gambar 2.3.
2. Bagian Software
Berupa software arduino yang menyertakan Integrated Development Environment (IDE) untuk penulisan program. Arduino membutuhkan instalasi driver untuk terhubung ke komputer. Di dalam IDE, ada contoh program dan perpustakaan untuk pengembangan program. Software arduino IDE yang digunakan bernama SKETCH.
2.3.1 Tipe Arduino
Ada beberapa tipe arduino yang terdapat dipasaran. Dari berbagai tipe arduino ini dapat dilihat berbagai spesifikasi dan kebutuhan dari user untuk memilih arduino yang akan digunakan.
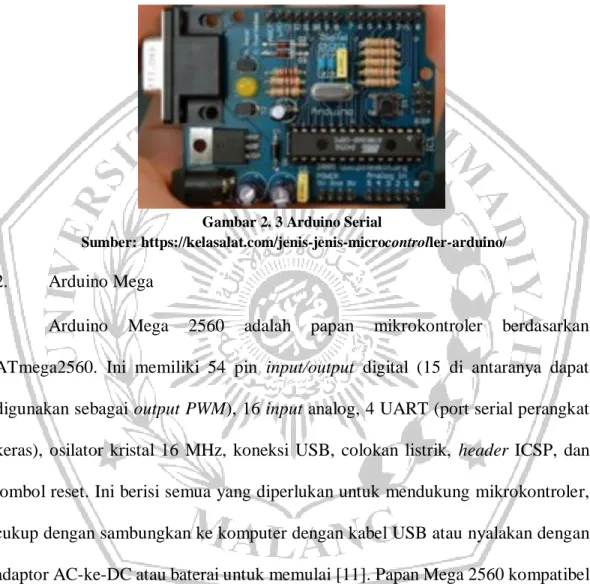
1. Arduino Serial
Arduino tipe ini menggunakan RS232 sebagai interface pemrograman atau komunikasi computer. Contoh arduinonya adalah arduino serial dan arduino serial V2.0. Arduino Serial RS323 mengintegrasikan konektor DB9 yang menyediakan koneksi ke berbagai perangkat dengan antarmuka RS232. Juga header pelindung RS232 akan memfasilitasi koneksi dan commissioning. Arduino ini menyediakan area pengelasan untuk memanfaatkan sepenuhnya ruang ekstra di atasnya, yang sangat nyaman untuk pembuatan prototype [8]. Arduino ini menyediakan sakelar
mode run / program. Walaupun saat sedang dimatikan arduino ini dapat memprogram pengontrol arduino dan ketika dinyalakan tetap dapat menggunakan arduino ini secara normal. Arduino ini dilengkapi dengan PCB perendaman emas.
Pin panjang di bagian belakang yang kompatibel dengan sebagian besar pengontrol arduino seperti arduino uno, arduino mega, dan leonardo.
Gambar 2. 3 Arduino Serial
Sumber: https://kelasalat.com/jenis-jenis-microcontroller-arduino/
2. Arduino Mega
Arduino Mega 2560 adalah papan mikrokontroler berdasarkan ATmega2560. Ini memiliki 54 pin input/output digital (15 di antaranya dapat digunakan sebagai output PWM), 16 input analog, 4 UART (port serial perangkat keras), osilator kristal 16 MHz, koneksi USB, colokan listrik, header ICSP, dan tombol reset. Ini berisi semua yang diperlukan untuk mendukung mikrokontroler, cukup dengan sambungkan ke komputer dengan kabel USB atau nyalakan dengan adaptor AC-ke-DC atau baterai untuk memulai [11]. Papan Mega 2560 kompatibel dengan sebagian besar perisai yang dirancang untuk Uno dan papan sebelumnya Duemilanove atau Diecimila. Contoh arduinonya adalah arduino mega dan arduino mega 2560.
Gambar 2. 4 Arduino Mega
Sumber: https://kelasalat.com/jenis-jenis-microcontroller-arduino/
3. Arduino FIO
Arduino Fio adalah papan mikrokontroler dengan mikrokontroler ATmega328P bekerja pada tegangan 3.3V dan 8 MHz. Arduino ini memiliki 14 digital pin input / output (dimana 6 dapat digunakan sebagai output PWM), 8 input analog, resonator on-board, tombol reset, dan lubang untuk pemasangan pin header [12]. Berbeda dengan arduino lainya, arduino fio memiliki koneksi untuk baterai Lithium Polymer. Arduino Fio juga mempunyai Soket XBee tersedia di bagian bawah papan. Arduino jenis ini lebih banyak digunakan untuk kegunaan nirkabel.
Arduino Fio ditujukan untuk aplikasi nirkabel. Pengguna dapat meng- upload sketsa dengan kabel FTDI atau Sparkfun breakout board. Selain itu, dengan menggunakan modifikasi USB-to-XBee adaptor seperti XBee Explorer USB, pengguna dapat meng-upload sketsa nirkabel menggunakan kabel.
Gambar 2. 5 Arduino FIO
Sumber : https://kelasalat.com/jenis-jenis-microcontroller-arduino/
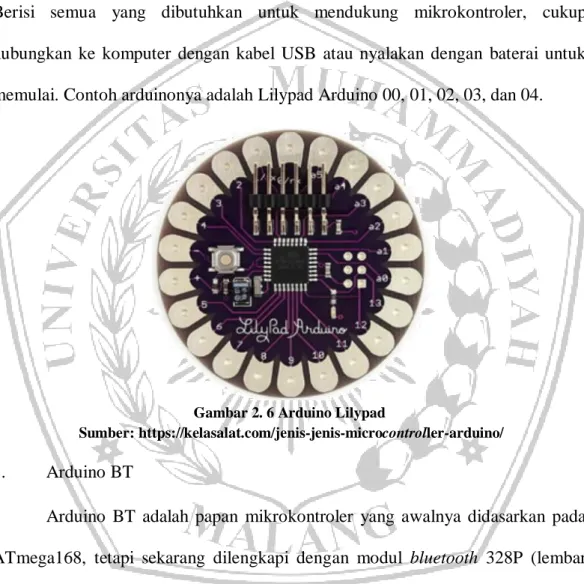
4. Arduino Lilypad
LilyPad Arduino USB adalah papan mikrokontroler yang berbasis pada ATmega32u4. Arduino ini memiliki 9 pin input / output digital (dimana 4 dapat digunakan sebagai output PWM dan 4 sebagai input analog), resonator 8 MHz, koneksi micro USB, konektor JST untuk baterai LiPo 3.7V, dan tombol reset [10].
Berisi semua yang dibutuhkan untuk mendukung mikrokontroler, cukup hubungkan ke komputer dengan kabel USB atau nyalakan dengan baterai untuk memulai. Contoh arduinonya adalah Lilypad Arduino 00, 01, 02, 03, dan 04.
Gambar 2. 6 Arduino Lilypad
Sumber: https://kelasalat.com/jenis-jenis-microcontroller-arduino/
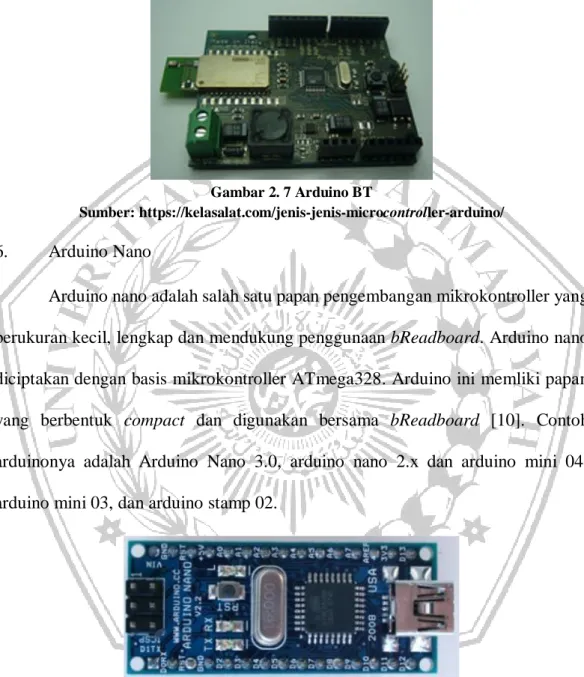
5. Arduino BT
Arduino BT adalah papan mikrokontroler yang awalnya didasarkan pada ATmega168, tetapi sekarang dilengkapi dengan modul bluetooth 328P (lembar data) dan Bluegiga WT11. Arduino BT mendukung komunikasi serial nirkabel melalui bluetooth (tetapi tidak kompatibel dengan headset Bluetooth atau perangkat audio lainnya). Arduino BT memiliki 14 pin input/output digital (6 di antaranya dapat digunakan sebagai output PWM dan satu dapat digunakan untuk mereset modul WT11), 6 input analog, osilator kristal 16 MHz, terminal sekrup untuk daya,
header ICSP, dan tombol reset. Arduino BT berisi semua yang diperlukan untuk mendukung mikrokontroler dan dapat diprogram secara nirkabel melalui koneksi Bluetooth.
Gambar 2. 7 Arduino BT
Sumber: https://kelasalat.com/jenis-jenis-microcontroller-arduino/
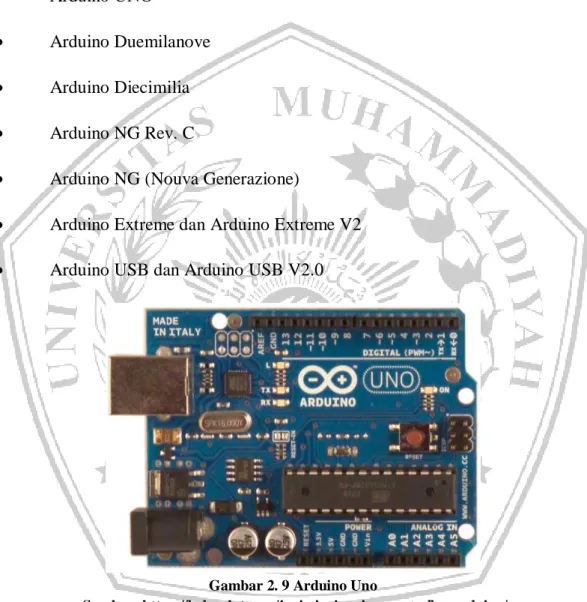
6. Arduino Nano
Arduino nano adalah salah satu papan pengembangan mikrokontroller yang berukuran kecil, lengkap dan mendukung penggunaan bReadboard. Arduino nano diciptakan dengan basis mikrokontroller ATmega328. Arduino ini memliki papan yang berbentuk compact dan digunakan bersama bReadboard [10]. Contoh arduinonya adalah Arduino Nano 3.0, arduino nano 2.x dan arduino mini 04, arduino mini 03, dan arduino stamp 02.
Gambar 2. 8 Arduino Nano
Sumber: https://kelasalat.com/jenis-jenis-microcontroller-arduino/
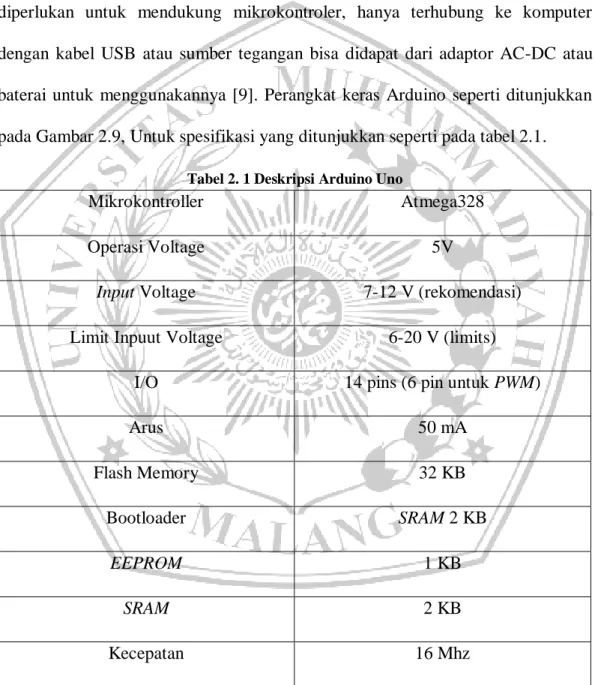
7. Arduino Uno
Arduino tipe ini menggunakan interface USB sebagai antarmuka pemrograman atau komunikasi komputer. Contoh arduino yang menggunakan interface USB untuk download kode program, yaitu:
Arduino UNO
Arduino Duemilanove
Arduino Diecimilia
Arduino NG Rev. C
Arduino NG (Nouva Generazione)
Arduino Extreme dan Arduino Extreme V2
Arduino USB dan Arduino USB V2.0
Gambar 2. 9 Arduino Uno
Sumber: https://kelasalat.com/jenis-jenis-microcontroller-arduino/
Arduino Uno merupakan produk berlogo Arduino yang sebenarnya adalah sejenis papan elektronik yang menggunakan komponen mikrokontroler ATmega 328 (perangkat yang berfungsi seperti komputer). Bagian ini dapat digunakan untuk
membuat rangkaian elektronika dari bentuk yang sederhana hingga bentuk yang semakin kompleks.
Board mikrokontroller arduino uno ini memiliki 14 pin input/output digital (dimana 6 pin dapat digunakan sebagai output PWM), 6 input analog, kristal osilator 16 MHz, koneksi USB, tombol reset jack listrik. Pin-pin ini berisi semua yang diperlukan untuk mendukung mikrokontroler, hanya terhubung ke komputer dengan kabel USB atau sumber tegangan bisa didapat dari adaptor AC-DC atau baterai untuk menggunakannya [9]. Perangkat keras Arduino seperti ditunjukkan pada Gambar 2.9, Untuk spesifikasi yang ditunjukkan seperti pada tabel 2.1.
Tabel 2. 1 Deskripsi Arduino Uno
Mikrokontroller Atmega328
Operasi Voltage 5V
Input Voltage 7-12 V (rekomendasi)
Limit Inpuut Voltage 6-20 V (limits)
I/O 14 pins (6 pin untuk PWM)
Arus 50 mA
Flash Memory 32 KB
Bootloader SRAM 2 KB
EEPROM 1 KB
SRAM 2 KB
Kecepatan 16 Mhz
Board arduino uno memiliki berbagai karakteristik yang bisa dilihat sebagai berikut :
A. Daya
Arduino Uno dapat diaktifkan melalui koneksi USB atau dari catu daya eksternal. Sumber daya dipilih secara otomatis. Daya eksternal (non-USB) dapat diperoleh dari adaptor AC/DC atau baterai. Adaptor dapat dihubungkan dengan mencolokkan center positive plug sepanjang 2,1 mm ke soket daya di papan [13].
Kabel daya baterai dapat dimasukkan ke dalam header pin Ground (Gnd) dan pin Vin pada konektor power. Papan Arduino UNO dapat beroperasi pada catu daya eksternal 6 hingga 20 Volt. Jika disuplai dengan kurang dari 7V, pin 5 volt mungkin bisa memberikan kurang dari 5 volt dan papan Arduino UNO bisa menjadi tidak stabil. Jika Anda menggunakan catu daya lebih besar dari 12 Volt, regulator tegangan dapat menjadi terlalu panas dan merusak board Arduino UNO. Kisaran yang direkomendasikan adalah 7 hingga 12 Volt.
B. Memori
Memori yang digunakan pada Aduino Uno R3 adalah ATmega328 yang memiliki 32 KB (dengan 0,5 KB digunakan untuk bootloader). ATmega 328 juga memiliki 2 KB SRAM dan 1 KB EEPROM yang dapat dibaca dan ditulis (RW / dengan perpustakaan EEPROM).
C. Input dan Output
Masing-masing dari 14 pin digital Arduino Uno dapat digunakan sebagai input dan output, menggunakan fungsi pin Mode(), digital Write(), dan digital Read() [14]. Fungsi-fungsi ini beroperasi pada 5 volt. Setiap pin dapat memasok atau menerima maksimum 40 mA dan memiliki resistor pull-up (terputus secara default) 20-50 kΩ.
D. Komunikasi
Arduino UNO memiliki sejumlah fasilitas untuk berkomunikasi dengan komputer, Arduino, atau mikrokontroler lainnya. Atmega 328 menyediakan komunikasi serial UART TTL (5V), tersedia pada pin digital 0 (RX) dan 1 (TX) [4].
Atmega 16U2 pada kartu saluran serial berkomunikasi melalui USB dan muncul sebagai port virtual untuk perangkat lunak di komputer. Firmware 16U2 menggunakan driver USB COM standar dan tidak memerlukan driver eksternal.
LED RX dan TX di papan menyala saat data dikirim melalui chip serial USB dan koneksi USB di komputer (tetapi tidak untuk komunikasi serial pada pin 0 dan 1).
Atmega328 juga mendukung komunikasi I2C (TWI) dan SPI.
E. Riset Otomatis
Alih-alih membutuhkan penekanan fisik tombol reset sebelum mengunduh, Arduino Uno dirancang sedemikian rupa sehingga memungkinkannya untuk disetel ulang dengan perangkat lunak yang berjalan di komputer yang terhubung.
F. Proteksi Arus Lebih USB
Arduino UNO memiliki sekering reset yang melindungi port USB komputer dari korsleting dan arus lebih. Jika lebih dari 500mA diterima melalui port USB, sekering akan secara otomatis terputus sampai korsleting atau kelebihan beban dilepas.
G. Karakteristik Fisik Arduino Uno
Panjang dan lebar maksimum PCB Arduino UNO masing-masing adalah 2,7 dan 2,1 inci, dengan konektor USB dan colokan listrik yang meningkatkan dimensinya. Empat lubang sekrup memungkinkan papan diamankan ke permukaan atau kotak [15]. Perhatikan bahwa jarak antara pin digital 7 dan 8 adalah 160 mil.
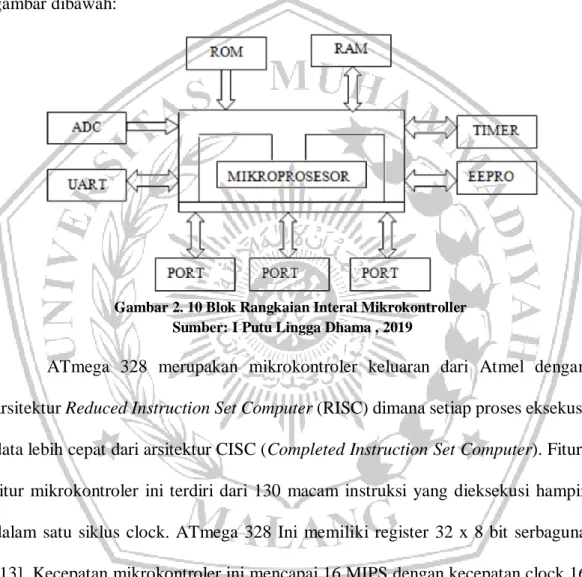
2.4 Mikrokontroler
Mikrokontroller adalah chip terintegerasi dari sebuah sistem tertanam (embedded sistem) untuk melakukan satu atau lebih fungsi tertentu, mikrokontroller didesain menggunakan teknologi CMOS (Complementary Metal Oxide Semiconductor) [16]. Blok rangkaian internal mikrokontroller seperti terlihat pada gambar dibawah:
Gambar 2. 10 Blok Rangkaian Interal Mikrokontroller Sumber: I Putu Lingga Dhama , 2019
ATmega 328 merupakan mikrokontroler keluaran dari Atmel dengan arsitektur Reduced Instruction Set Computer (RISC) dimana setiap proses eksekusi data lebih cepat dari arsitektur CISC (Completed Instruction Set Computer). Fitur- fitur mikrokontroler ini terdiri dari 130 macam instruksi yang dieksekusi hampir dalam satu siklus clock. ATmega 328 Ini memiliki register 32 x 8 bit serbaguna [13]. Kecepatan mikrokontroler ini mencapai 16 MIPS dengan kecepatan clock 16 MHz. Mikrokontroler ATmega 328 dilengkapi dengan memori Flash 32 KB dan Arduino Uno memiliki bootloader yang menggunakan memori flash 2 KB sebagai bootloader. Keunggulan Atmega 328 adalah dilengkapi dengan EEPROM (Electrically Erasable Programmable Read Only Memory) sebesar 1 KB sebagai ruang penyimpanan data semi permanen, karena EEPROM tetap dapat menyimpan
data meskipun listrik dimatikan. Selain itu, ATmega juga dilengkapi dengan 2KB SRAM (Static Random Access Memory).
Sinyal yang diproses oleh mikrokontroler merupakan sinyal digital yang diubah menggunakan ADC (analog to digital converter) dan DAC (digital to analog converter) [16]. Mikrokontroler ATmega 328 adalah bagian dari keluarga AVR 8-bit. Memiliki fungsi Harvard (memisahkan memori kode program dan memori data dan bekerja secara paralel).
Gambar 2. 11 Bentuk Fisik Mikrokontroller ATmega328 Sumber: I Putu Lingga Dhama , 2019
2.4.1. Konfigurasi Mikrokontroler
Mikrokontroler ATmega 328 menyediakan memori dalam chip yang sama dengan prosesor (in chip). Mikrokontroler ATmega 328 memiliki 14 pin I/O digital, 6 diantaranya merupakan keluaran PWM (Pulse With Modulation) [7]. Antarmuka serial master atau slave SPI ATmega 328 pada mikrokontroler Arduino Uno memiliki bentuk dan konfigurasi fisik seperti gambar di bawah ini:
Gambar 2. 12 Konfigurasi Fisik Mikrokontroller ATmega 328 Sumber: I Putu Lingga Dhama , 2019
2.5 Komponen Pendukung Alat
Dalam pembuatan alat tugas akhir ini dibutuhkan komponen pendukung agar alat yang dibuat bisa berjalan sesuai dengan yang diinginkan. Berikut dijelaskan komponen pendukung dalam rancang bangun sistem kendali model pembersih kaca sebagai berikut.
2.5.1. PWM
Pulse Width Modulation (PWM) secara umum adalah cara untuk memanipulasi lebar sinyal yang dinyatakan oleh pulsa dalam suatu periode untuk mendapatkan tegangan rata-rata yang berbeda [5]. Sinyal PWM umumnya memiliki amplitudo tetap dan frekuensi fundamental, tetapi lebar pulsa bervariasi. Lebar pulsa PWM berbanding lurus dengan amplitudo sinyal asli yang tidak termodulasi.
Artinya, sinyal PWM memiliki frekuensi tetap, tetapi siklus kerjanya bervariasi (antara 0% dan 100%).
Efek keluaran gelombang analog pada Arduino dapat dicapai dengan teknik PWM pada bentuk gelombang digital. Teknik PWM ini dilakukan dengan mengontrol bentuk gelombang digital untuk ON/OFF dalam satu periode gelombang. Perbandingan waktu antara penyalaan poros dan waktu poros dalam satu periode disebut duty cycle [17]. Perubahan duty cycle dapat dilihat dari persamaan berikut:
𝑇𝑡𝑜𝑡𝑎𝑙 = 𝑇𝑜𝑛+ 𝑇𝑜𝑓𝑓
𝐷 = 𝑇𝑜𝑛 𝑇𝑡𝑜𝑡𝑎𝑙 𝑉𝑜𝑢𝑡 = 𝐷 𝑥 𝑉𝑖𝑛
𝑉𝑜𝑢𝑡 = 𝑇𝑜𝑛
𝑇𝑡𝑜𝑡𝑎𝑙 𝑥 𝑉𝑖𝑛 Ket : Ton = Waktu Pulsa “High”
Toff = Waktu Pulsa “Low”
D = Duty cycle adalah lamanya pulsa high dalam satu perioda
Dari persamaan di atas diketahui bahwa mengubah duty cycle mengubah tegangan keluaran atau tegangan rata-rata. Modulasi lebar pulsa (PWM) adalah teknik yang digunakan untuk menerima sinyal analog dari perangkat digital [18].
Sebenarnya sinyal PWM dapat dibangkitkan dengan banyak cara, bisa menggunakan cara analog menggunakan rangkaian penguat operasional atau menggunakan cara digital.
Dengan metode analog, setiap perubahan PWM sangat halus, sedangkan dengan metode digital, setiap perubahan PWM dipengaruhi oleh resolusi PWM itu sendiri. Resolusi adalah banyaknya variasi perubahan nilai pada PWM. Misalnya,
jika PWM memiliki resolusi 8-bit, berarti PWM memiliki variasi 28 = 256 variasi, mulai dari 0-255 perubahan nilai yang mewakili siklus kerja 0-100% dari output PWM.
Duty cycle mewakili fraksi waktu sinyal dengan status logika tinggi dalam satu siklus. Siklus dimulai dengan transisi sinyal rendah-tinggi dan berakhir dengan transisi berikutnya [18]. Jika selama satu siklus waktu sinyal pada waktu tinggi sama dengan waktu rendah, dikatakan sinyal tersebut memiliki 50% Duty cycle . Duty cycle 20% berarti sinyal berada pada logika 1 selama 1/5 dari total waktu.
Gambar 2. 13 Duty cycle dan Resolusi PWM
Sumber : https://www.sinauarduino.com/artikel/tutorial-PWM-pada-arduino/
Dari gambar di atas dapat dilihat bagaimana duty cycle divariasikan pada setiap gelombang. Sintaks analogWrite (0) membuat siklus tugas 0%, sedangkan analogWrite (255) membuat siklus tugas 100%. Rentang PWM dari 0 hingga 255
menghasilkan siklus tugas 0% hingga 100%. Rentang dari 0 hingga 255 adalah PWM pada Arduino Uno yang hanya memiliki resolusi 8 bit (8 bit = 2 pangkat 8 = 256). Jadi, jika menggunakan versi Arduino yang berbeda, kita perlu mengetahui resolusi PWM untuk mengetahui batas maksimum dan maksimum.
Beberapa contoh aplikasi PWM antara lain modulasi data untuk telekomunikasi, pengontrolan daya atau tegangan yang masuk ke beban, pengatur tegangan, efek audio dan amplifikasi, dan aplikasi lainnya. Aplikasi PWM berbasis mikrokontroler biasanya hadir dalam bentuk kontrol kecepatan motor DC, kontrol motor servo, dan pengaturan lampu LED.
2.5.2. Sensor Ultrasonik HCSR04
Sensor HCSR04 merupakan sensor pengukur jarak untuk penyimpangan gelombang ultrasonik. Keunggulan dari sensor ini adalah pendeteksian sekitar 2 cm hingga kisaran 400-500 cm dengan resolusi 1 cm [19]. Sensor HCSR04 adalah versi hemat biaya dari sensor ultrasonik PING buatan parallax. Perbedaannya terletak pada pin yang digunakan. HCSR04 menggunakan 4 pin sedangkan PING Parallax menggunakan 3 pin.
Gambar 2. 14 Bentuk Fisik Sensor Ultrasonik HC-SR04 Sumber: Fitri Puspasari , 2019
Sensor ultrasonik tipe HCSR04 adalah alat untuk mengukur jarak suatu objek. Rentang jarak yang dapat diukur adalah sekitar 2-450 cm. Perangkat ini menggunakan dua pin digital untuk mengkomunikasikan jarak yang terbaca [20].
Konfigurasi pin dan tampilan sensor HC-SR04 ditunjukkan pada gambar berikut:
Gambar 2. 15 Konfigurasi Pin Sensor Ultrasonik HC-SR04 Sumber: Fitri Puspasari , 2019
Sensor jenis ini merupakan modul elektronik yang menggunakan suara untuk mendeteksi suatu objek. HC-SR04 terdiri dari 2 komponen utama yaitu ultrasonik transmiter dan ultrasonik receive [15]. Fungsi pemancar ultrasonik adalah mengirimkan gelombang ultrasonik pada frekuensi 40 KHz, kemudian penerima ultrasonik menangkap gelombang ultrasonik yang dipantulkan yang mengenai suatu benda.
Prinsip fungsional dari sensor ultrasonik ini bekerja dengan mengirimkan pulsa ultrasonik sekitar 40 KHz, kemudian memantulkan kembali pulsa gema dan mampu menghitung waktu yang dibutuhkan dalam mikrodetik [2]. Sensor ini dapat memicu impuls hingga 20 kali per detik dan melokalisasi objek hingga 3 meter.
Waktu transit gelombang ultrasonik dari pemancar ke penerima sebanding dengan dua kali jarak antara sensor dan bidang yang dipantulkan, seperti yang ditunjukkan pada gambar berikut:
Gambar 2. 16 Ilustrasi Waktu Transit Gelombang Ultrasonik
Sumber: Fitri Puspasari , 2019
Sensor HC-SR04 bekerja dengan sinyal pulsa dengan durasi minimal 10 μs (10 mikrodetik) diterapkan ke pin Trigger. Sensor kemudian mengirimkan delapan pulsa ultrasonik pada frekuensi 40 KHz. Pola 8-pulsa ini digunakan untuk penanda sinyal ultrasonik dari modul ini, yang memungkinkan penerima untuk membedakan pola yang ditransmisikan dari kebisingan sekitar ultrasonik.
Delapan pulsa ultrasonik bergerak melalui udara menjauh dari transmiter / pemancar mengarah ke benda atau obyek yang ada di depannya. Sementara itu, pin echo menjadi HIGH untuk mulai menghasilkan sinyal echo awal. Jika tidak ada sinyal ultrasonik yang dipantulkan atau diterima oleh penerima selama rentang 38 msec (milidetik), artinya tidak ada objek atau objek, sinyal gema akan diinterupsi dan diatur ulang ke LOW [15]. Jika selama ini sinyal ultrasonik dipantulkan atau diterima oleh penerima, sinyal gema langsung berubah menjadi LOW. Lebar rentang waktu sinyal ECHO ini digunakan untuk mengukur jarak antara sensor dengan objek atau benda.
Dengan menggunakan persamaan jarak – kecepatan – waktu perambatan gelombang suara di udara, hal ini dapat digambarkan sebagai berikut:
Jarak = kecepatan x jarak
Dimana cepat rambat gelombang bunyi di udara = 340 m/s = 0,034 cm / S.
Karena gelombang ultrasonik bergerak bolak-balik dari sensor (pemancar) ke objek dan kembali ke sensor (penerima), rumusnya adalah:
Jarak (cm) = waktu (μS) * 0,034 / 2 2.5.3. Motor stepper
Motor stepper adalah jenis motor DC yang digerakkan oleh pulsa digital.
Motor stepper adalah motor listrik yang dapat mengubah pulsa listrik tertentu menjadi gerakan motor vertikal yang disebut langkah. Satu putaran motor menghasilkan 360 derajat dengan jumlah langkah tertentu per derajat. Ukuran kerja motor stepper biasanya ditentukan dalam jumlah langkah per putaran atau detik.
Prinsip kerja motor stepper adalah mengubah pulsa masukan menjadi gerak mekanis diskrit [21]. Menggunakan tabung motor stepper membutuhkan pengontrol motor stepper yang menghasilkan pulsa periodik. Motor stepper NEMA 17 juga memiliki resolusi langkah 1,8 derajat, yang selanjutnya dapat dikurangi menjadi 0,1123 derajat dengan driver tot A4988 untuk slide atau fgerakan yang lebih mulus. Ilustrasi untuk struktur motor stepper sederhana dan pulsa yang dibutuhkan untuk menggerakannya tersaji dalam gambar berikut :
Gambar 2. 17 Struktur Motor stepper Sumber: Andreas Istiyanto , 2018
2.5.4. Driver Motor L298NN
Driver motor L298N merupakan driver motor yang didalamnya terdapat 2 rangkaian driver H-bridge, terdapat 15 kaki diantaranya 2 kaki vcc yaitu vcc untuk motor dan vcc untuk driver L298N, terdapat 2 input PWM dan 4 logika input untuk putaran motor, ada 4 output untuk motor dan 1 kaki di-ground. Terdapat berbagai pin pada driver motor L298NN seperti gambar dibawah ini :
Gambar 2. 18 Bentuk Fisik dan Konfigurasi Pin Driver Motor L298NN Sumber: Dyah Lestari, 2014
Dari gambar diatas kita bisa melihat letak pin out yang ada pada driver L298NN, berikut penjelasan pin out driver otor L298NN :
- 1 = Jumper 5V enable, jika di jumper maka tegangan IC akan diambil dari input tegangan motor (8) yang telah diturunkan dengan regulator.
- 2 = Jumper enable motor A. Jika di jumper maka kecepatan motor akan maksimum dan konstan berdasarkan input power motor yang digunakan.
- 3 = Jumper enable motor B. Jika di jumper maka kecepatan motor akan maksimum dan konstan berdasarkan input power motor yang digunakan.
- 4 dan 5 = out 1 dan out 2 = pin out motor A
- 6 dan 7 = out 4 dan out 3 = pin out motor B - 8 = sumber tegangan motor
- 9 = Ground
- 10 = Sumber tegangan IC (Tegangan operasional), dapat berfungsi sebagai input maupun output, tergantung kondisi yang diiginkan.
- 11 = ENA = berfungsi sebagai enable motor A. terdapat 3 keadaan yang memungkinkan, pertama dihubungkan menggunakan jumper 2, kedua dihubungkan ke pin PWM mikrokontroller untuk mengatur kecepatan motor, ketiga dibiarkan terbuka yang mengakibatkan pin motor A tidak aktif.
- 12,13,14,15 = input out 1, input out 2, input out 3, input out 4. Input yang diterima berupa input digital (High atau Low).
- 16 = ENB = berfungsi sebagai enable motor B. terdapat tiga keadaan yang memungkinkan pertama dihubungkan menggunakan jumper 3, kedua dihubungkan ke pin PWM mikrokontroller untuk mengatur kecepatan motor, ketiga dibiarkan terbuka yang mengakibatkan pin motor A tidak aktif.
Driver L298NN memiliki ketentuan sumber tegangan IC dan motor yang akan digunakan jika menggunakan motor dengan tegangan kerja di bawah 5V misalnya 3V, maka catu daya IC dan motor harus terpisah [5]. Jika menggunakan motor yang memiliki tegangan kerja dalam rentang 5 – 12 V, sumber tegangan IC dan motor dapat digabung. Dimana pada sumber tegangan motor (pin 8) diberi tegangan 12 V, sumber tenagan IC (pin 10) dibiarkan tanpa input dari luar dan jumper 1 harus tertutup (aktif). Dengan begini IC memperoleh tegangan dari pin 8.
Untuk lebih jelasnya dapat dilihat pada gambar rangkaian driver L298NN ketika dirangkai menggunakan arduino uno dengan 2 motor DC [4].
Gambar 2. 19 Rangkaian Driver Motor L298NN Dengan Arduino Uno (Sumber: Dyah Lestari, 2014)
2.5.5. Catu Daya (Power supply)
Pengertian power supply adalah sebuah alat atau perangkat keras yang mampu menyuplai tenaga atau tegangan listrik secara langsung dari sumber tegangan listrik ke tegangan listrik yang lainnya. Dimana alat tersebut dapat dapat mengubah tengan AC (tegangan bolak balik) menjadi tegangan DC (searah).
Baterai adalah sumber power supply DC yang paling baik. Namun untuk aplikasi yang membutuhkan daya lebih besar, daya dari baterai tidak mencukupi. Sumber daya yang besar adalah sumber arus bolak-balik AC (Alternating Current) dari PLN. Untuk itu diperlukan suatu perangkat yang dapat mengubah arus 15 AC menjadi arus DC. Berdasarkan teknik regulasi, terdapat dua jenis power supply yaitu linier regulated power supply dan switching regulated power supply.
Power supply biasanya digunakan untuk komputer sebagai penghantar tegangan listrik secara langsung kepada komponen - komponen atau perangkat keras lainnya yang ada di komputer tersebut, seperti hardisk, kipas, motherboard dan lain sebagainya. Namun pada kali ini power supply digunakan pada module Arduino sebagai penghantar tegangan listrik secara langsung ke komponen – komponen atau perangkat keras lainnya yang ada pada alat tersebut, seperti Motor DC dll. [4] menambahkan bahwa tegangan yang diberikan terhadap rangkaian mikrokontroler harus sesuai karena jika berlebihan dari rentang yang telah ditentukan maka akan berakibat fatal terhadap rangkaian yaitu rusak.
Gambar 2. 20 Power supply 12 V
Sumber : (https://www.makerlab-electronics.com/
2.5.6. Motor DC
Motor listrik DC adalah suatu perangkat yang mengubah energi listrik menjadi energi kinetic atau gerakan. Motor DC ini juga dapat disebut sebagai motor arus searah [5]. Dengan memiliki dua terminal dan memerlukan tegangan arus searah untuk menggerakannya, motor listrik DC ini biasanya digunakan pada perangkat elektronik dengan arus tegangan kecil.
Motor listrik ini menghasilkan sejumlah putaran per menit atau biasanya dikenal dengan istilah RPM (Revolutions per minute) dan dapat dibuat berputar serah jarum jam maupun berlawanan arah jarum jam apabila polaritas listrik yang
diberikan motor ini tersebut dibalikan. Kebanyakan motor listrik DC memberikan kecepatan rotasi sekitar 3000 rpm sampai 8000 rpm dengan tegangan operasional dari 1,5V hingga 24V [2]. Namun ketika tegangan yang diberikan ke motor DC tersebut turun menjadi 50% dari tegangan operasional yang ditentukan, maka motor tersebut tidak dapat berputar atau terhenti. Sebaliknya, jika tegangan yang diberikan ke motor DC tersebut lebih tinggi sekitar 30% dari tegangan operasional yang ditentukan, maka motor DC tersebut akan menjadi sangat panas dan akhirnya menjadi rusak.
Gambar 2. 21 Motor DC Sumber: https://ecadio.com/
Terdapat dua bagian utama pada sebuah Motor Listrik DC, yaitu Stator dan Rotor. Stator adalah bagian motor yang tidak berputar, bagian yang statis ini terdiri dari rangka dan kumparan medan. Sedangkan Rotor adalah bagian yang berputar, bagian Rotor ini terdiri dari kumparan jangkar. Dua bagian utama ini dapat dibagi lagi menjadi beberapa komponen penting yaitu diantaranya adalah Yoke (kerangka magnet), Poles (kutub motor), Fieldwinding (kumparan medan magnet), Armature Winding (KumparanJangkar), Commutator (Komutator) dan Brushes (kuas/sikat arang) [7].
Pada prinsipnya motor listrik DC menggunakan fenomena elektromagnet untuk bergerak, ketika arus listrik diberikan ke kumparan, permukaan kumparan yang bersifat utara akan bergerak menghadap ke magnet yang berkutub selatan dan kumparan yang bersifat selatan akan bergerak menghadap ke utara magnet [4]. Saat ini, karena kutub utara kumparan bertemu dengan kutub selatan magnet ataupun kutub selatan kumparan bertemu dengan kutub utara magnet maka akan terjadi saling tarik menarik yang menyebabkan pergerakan kumparan berhenti [22].