Widodo, 2015
UJI COBA DAN ANALISIS SENSOR SERAT OPTIK UNTUK WEIGHT IN MOTION (WIM) PADA REPLIKA KENDARAAN STATIS DAN DINAMIS
Universitas Pendidikan Indonesia | repository.upi.edu | perpustakaan.upi.edu
UJI COBA DAN ANALISIS SENSOR SERAT OPTIK UNTUK WEIGHT IN
MOTION (WIM) PADA REPLIKA KENDARAAN STATIS DAN DINAMIS
SKRIPSI
diajukan untuk memenuhi sebagian syarat untuk memperoleh gelar Sarjana Sains Program Studi Fisika
oleh
Widodo
NIM 1103316
PROGRAM STUDI FISIKA
DEPARTEMEN PENDIDIKAN FISIKA
FAKULTAS PENDIDIKAN MATEMATIKA DAN ILMU PENGETAHUAN ALAM
UNIVERSITAS PENDIDIKAN INDONESIA
Widodo, 2015
UJI COBA DAN ANALISIS SENSOR SERAT OPTIK UNTUK WEIGHT IN MOTION (WIM) PADA REPLIKA KENDARAAN STATIS DAN DINAMIS
Universitas Pendidikan Indonesia | repository.upi.edu | perpustakaan.upi.edu
Uji Coba dan Analisis Sensor Serat
Optik untuk
Weight In Motion
(WIM) pada Replika Kendaraan
Statis dan Dinamis
Oleh Widodo
Sebuah skripsi yang diajukan untuk memenuhi salah satu syarat memperoleh gelar Sarjana pada Fakultas Pendidikan Matematika dan Ilmu Pengetahuan Alam
© Widodo 2015
Universitas Pendidikan Indonesia Agustus 2015
Hak Cipta dilindungi undang-undang.
Widodo, 2015
UJI COBA DAN ANALISIS SENSOR SERAT OPTIK UNTUK WEIGHT IN MOTION (WIM) PADA REPLIKA KENDARAAN STATIS DAN DINAMIS
Universitas Pendidikan Indonesia | repository.upi.edu | perpustakaan.upi.edu
dengan dicetak ulang, difoto kopi, atau cara lainnya tanpa ijin dari penulis.
WIDODO
UJI COBA DAN ANALISIS SENSOR SERAT OPTIK UNTUK WEIGHT IN
MOTION (WIM) PADA REPLIKA KENDARAAN STATIS DAN DINAMIS
disetujui dan disahkan oleh pembimbing :
Pembimbing I
Dwi Hanto, M.Si. NIP. 198404252008121003
Pembimbing II
Drs. Waslaluddin, M.T. NIP. 196302071991031002
Mengetahui,
Kuasa Ketua Departemen Pendidikan Fisika
Sekretaris Departemen Pendidikan Fisika
Widodo, 2015
UJI COBA DAN ANALISIS SENSOR SERAT OPTIK UNTUK WEIGHT IN MOTION (WIM) PADA REPLIKA KENDARAAN STATIS DAN DINAMIS
Universitas Pendidikan Indonesia | repository.upi.edu | perpustakaan.upi.edu
UJI COBA DAN ANALISIS SENSOR SERAT OPTIK UNTUK WEIGHT IN
MOTION (WIM) PADA REPLIKA KENDARAAN STATIS DAN DINAMIS
Nama replika kendaraan berupa miniatur truk dalam keadaan statis dan dinamis dengan memanfaatkan prinsip mikrobending. Penelitian ini dilakukan untuk mengukur berat miniatur truk statis dan dinamis dengan menggunakan sensor serat optik. Metode yang digunakan yaitu melakukan percobaan di laboratorium. Penelitian ini menggunakan Light Emitting Diode (LED) dengan panjang gelombang 1310 nm, sensor serat optik, serat optik multimode step index, power meter, photodetector, Data Acquisition (DAQ), softwere weight in motion sensor yang dibuat oleh Pusat Penelitian Fisika LIPI, dan miniatur truk. Dari hasil penelitian ini diperoleh bahwa untuk mengukur berat miniatur truk statis dan dinamis dapat menggunakan persamaan yang didapatkan dari hasil karakterisasi sensor serat optik yaitu BT = (D + B) volt x 11,8 kg/volt + 9,66 kg. Sensor serat optik mampu merespon baik untuk berat miniatur truk antara 22,83 kg sampai 62,85 kg dengan kecepatan mendekati 0,5 km/jam sampai 1 km/jam. Faktor kecepatan mempengaruhi berat miniatur truk yang terukur. Pada nilai kecepatan maksimum 2,5 km/jam, berat miniatur truk dinamis fluktuatif. Hasil pengujian berat kendaraan pada miniatur truk tanpa muatan, miniatur truk dengan muatan 20 kg, dan miniatur truk dengan muatan 40 kg menunjukkan error masing-masing 0,16 %, 2,26 %, dan 7,3 %. Dengan error yang relatif kecil ini maka sensor serat optik dapat dijadikan sebagai alternatif lain dalam pengukuran berat kendaraan statis maupun dinamis.
Widodo, 2015
UJI COBA DAN ANALISIS SENSOR SERAT OPTIK UNTUK WEIGHT IN MOTION (WIM) PADA REPLIKA KENDARAAN STATIS DAN DINAMIS
Universitas Pendidikan Indonesia | repository.upi.edu | perpustakaan.upi.edu
THE TEST AND ANALYSIS OF FIBER OPTIC SENSOR FOR WEIGHT IN MOTION (WIM) TOWARD THE REPLICA OF STATIC AND DYNAMIC
VEHICLES
ABSTRACT
Optical fiber can be used as a weight sensor for Weight in Motion (WIM) toward the replica of miniature truck in a static and dynamic condition by using the principle of micro bending. This research was conducted to measure the weight of the static and dynamic miniature trucks using fiber optic sensors. The methods used are conduct experiments in the laboratory. This study also used a Light Emitting Diode (LED) with a wavelength of 1310 nm, optical fiber sensors, step-index multimode optical fiber, power meter, photo detector, Data Acquisition (DAQ), software weight in motion sensor made by the Physics Research Center of LIPI, and miniature trucks. The results shows that to measure the weight of static and dynamic miniature trucks can be used the equations that obtained from the characterization of optical fiber sensors which BT = (D + B) x 11.8 kg volt / volt + 9.66 kg. Fiber optic sensors are able to respond well of truck miniature weight between 22.83 kg to 62.85 kg at speeds approaching 0.5 km / h to 1 km / h. Speed factors affecting the measured weight of miniature trucks, which the value of the maximum speed 2.5 km / h, the dynamic truck miniature weight is volatile. the last are results of unladed miniature truck, then truck with a load of 20 kg, and a miniature truck with a load of 40 kg shows that error respectively 0.16%, 2.26% and 7.3%. The error is relatively small, so the fiber optic sensors can be used as an alternative for the measurement of static and dynamic vehicle weight.
Widodo, 2015
UJI COBA DAN ANALISIS SENSOR SERAT OPTIK UNTUK WEIGHT IN MOTION (WIM) PADA REPLIKA KENDARAAN STATIS DAN DINAMIS
Universitas Pendidikan Indonesia | repository.upi.edu | perpustakaan.upi.edu DAFTAR ISI
A. Latar Belakang Penelitian ... 1
B. Rumusan Masalah ... 4
C. Tujuan Penelitian ... 4
D. Manfaat Penelitian ... 5
E. Struktur Organisasi Skripsi ... 5
BAB II ... 7
SENSOR SERAT OPTIK UNTUK WEIGHT IN MOTION (WIM) PADA REPLIKA KENDARAAN STATIS DAN DINAMIS ... 7
A. Serat Optik ... 7
1. Bagian-Bagian pada Serat Optik ... 7
2. Jenis Serat Optik ... 8
3. Perambatan Cahaya pada Serat Optik ... 9
4. Keuntungan Menggunakan Serat Optik ... 12
5. Kerugian dalam Serat Optik ... 13
B. Sensor Serat Optik Base on Microbending ... 14
C. Berat Kendaraan Statis ... 16
D. Berat Kendaraan Dinamis ... 18
BAB III ... 20
METODOLOGI PENELITIAN ... 20
A. Metode Penelitian ... 20
B. Waktu dan Tempat Penelitian ... 20
C. Alat dan Bahan ... 21
1. Light Emitting Diode (LED) ... 21
2. Photodetector ... 21
3. Data Acquisition (DAQ) ... 21
4. Komputer ... 22
Widodo, 2015
UJI COBA DAN ANALISIS SENSOR SERAT OPTIK UNTUK WEIGHT IN MOTION (WIM) PADA REPLIKA KENDARAAN STATIS DAN DINAMIS
Universitas Pendidikan Indonesia | repository.upi.edu | perpustakaan.upi.edu
6. Power Meter ... 23
7. Miniatur Truk ... 23
8. Timbangan Digital ... 24
9. Beban Statis ... 24
D. Langkah - Langkah Penelitian ... 25
1. Studi Literatur ... 25
2. Pengukuran Berat Miniatur Truk dengan Menggunakan Timbangan ... 25
3. Pengujian Daya Optik pada Sensor Serat Optik ... 26
4. Pengujian Tegangan Keluaran Optik pada Sensor Serat Optik ... 27
5. Pengukuran Tegangan Keluaran pada Roda Miniatur Truk dengan Menggunakan Sensor Serat Optik ... 27
6. Karakterisasi Sensor Serat Optik ... 29
7. Pengujian Tegangan Keluaran pada Roda Miniatur Truk dengan Menggunakan Sensor Serat Optik ... 39
BAB IV ... 31
HASIL DAN PEMBAHASAN ... 31
1. Pengukuran Berat Miniatur Truk dengan Menggunakan Timbangan ... 31
2. Pengujian Daya Optik pada Sensor Serat Optik ... 39
3. Pengujian Tegangan Keluaran Optik pada Sensor Serat Optik ... 41
4. Pengukuran Berat Miniatur Truk dengan Menggunakan Sensor Serat Optik ... 42
5. Karakterisasi Sensor Serat Optik ... 51
6. Pengujian Berat Miniatur Truk dengan Menggunakan Sensor Serat Optik ... 56
BAB V ... 60
KESIMPULAN DAN SARAN ... 60
A. Kesimpulan ... 60
B. Saran ... 60
DAFTAR PUSTAKA ... 61
LAMPIRAN ... 63
Widodo, 2015
UJI COBA DAN ANALISIS SENSOR SERAT OPTIK UNTUK WEIGHT IN MOTION (WIM) PADA REPLIKA KENDARAAN STATIS DAN DINAMIS
Universitas Pendidikan Indonesia | repository.upi.edu | perpustakaan.upi.edu
BAB I
PENDAHULUAN
A. Latar Belakang Penelitian.
Pengawasan terhadap sarana dan prasarana pada sistem transportasi merupakan hal yang harus dilakukan pemerintah untuk menunjang proses perkembangan ekonomi rakyat. Salah satu upaya pemerintah dalam melakukan pengawasan tersebut adalah dengan mengoperasikan jembatan timbang. Menurut Ilham & Suwoyo (2013, hlm. 18) “Jembatan timbang adalah seperangkat alat untuk menimbang kendaraan barang/truk yang dapat dipasang secara tetap atau alat yang dapat dipindah-pindahkan (portable) yang digunakan untuk mengetahui berat kendaraan beserta muatannya”. Dalam fungsi dan peranannya, Ilham & Suwoyo. (2013, hlm. 18) juga menjelaskan bahwa “Fungsi dan peranan jembatan timbang adalah untuk melakukan pengawasan jalan melalui kegiatan pemantauan angkutan barang di jalan yang hasilnya dapat digunakan dalam perencanaan transportasi”. Dalam pengawasan jembatan timbang dilakukan oleh petugas seperti yang telah diungkapkan bahwa “Pengawasan jembatan timbang selama ini dilakukan dengan cara manual, yaitu dengan menempatkan petugas pencatat berat kendaraan pada jembatan timbang” (Ilham & Suwoyo, 2013, hlm. 18).
Sejauh ini penggunaan jembatan timbang masih mempunyai banyak kendala. Hidayat dkk. (2014, hlm. 300) mengungkapkan bahwa “selain harus berhenti saat pengukuran juga biaya kontruksi dan biaya pemeliharaan yang mahal menjadi kekurangan dari stasiun jembatan timbang”. Pada kasus lain, berat kendaraan pada saat pengukuran dengan menggunakan jembatan timbang berbeda dengan berat kendaraan saat di jalan. Hal ini diungkapkan oleh Simatupang dkk. (2008, hlm. 822) bahwa “Muatan Sumbu Terberat yang disediakan ini pada umumnya lebih rendah dari kenyataan Muatan Sumbu Terberat yang ada dilapangan, sehingga terjadi pelanggaran (overloading)”. Adapun definisi dari overloading itu sendiri sebagaimana yang dikemukakan oleh Idham (2012, hlm. 87) :
Overloading merupakan suatu kondisi kerusakan jalan akibat kendaraan yang
2
Widodo, 2015
UJI COBA DAN ANALISIS SENSOR SERAT OPTIK UNTUK WEIGHT IN MOTION (WIM) PADA REPLIKA KENDARAAN STATIS DAN DINAMIS
Universitas Pendidikan Indonesia | repository.upi.edu | perpustakaan.upi.edu
muatan lebih (excessive overloading) dan sistem penanganan yang belum memadai berakibat pada hancurnya jalan sebelum umur teknis jalan tercapai, sehingga hal ini akan membutuhkan biaya tambahan untuk mempertahankan fungsi jalan tersebut.
Aturan mengenai batasan muatan maksimal bagi kendaraan yang melintas di jalan sudah jelas, sebagaimana telah dijelaskan oleh Idham (2012, hlm. 88) :
Penetapan beban sumbu standar kendaraan di jalan raya dapat diinterpretasikan dalam bentuk Muatan Sumbu Terberat (MST) dalam Peraturan Pemerintah No 43 Tahun 1993 tentang prasarana dan lalulintas jalan, Pasal 11, jalan raya Indonesia diklasifikasi berdasarkan MST terberat dari kendaraan yang boleh melintasi jalan tersebut. Dimana kelas jalan paling tinggi adalah kelas jalan I Arteri dengan muatan sumbu terberat yang diizinkan adalah 10 Ton, sedangkan kelas jalan paling rendah adalah III C, yaitu jalan lokal dengan muatan sumbu terberat yang diizinkan adalah 8 Ton.
Overloading merupakan salah salah satu penyebab kerusakan sarana dan
prasarana pada sistem transportasi, sebagaimana yang telah diungkapkan oleh Widiyatmoko dkk. (2013, hlm. 168) bahwa “rusaknya sarana transportasi diantaranya diakibatkan dari adanya kendaraan dengan muatan berlebih (overloading) sehingga banyak berdampak terhadap terjadinya kecelakaan lalu lintas”.
Seiring berkembangnya teknologi, berat kendaraan bisa diukur dengan memanfaatkan teknologi Weight In Motion (WIM) seperti yang telah diungkapkan oleh Widiyatmoko dkk. (2013, hlm. 168) “Dewasa ini, berkembang sebuah teknologi Weight In Motion (WIM) yaitu penimbangan kendaraan tanpa henti”.
“Weight In Motion (WIM) merupakan teknologi pengukuran beban untuk
kendaraan dinamis” (Hidayat, dkk. 2014, hlm. 300). Hal semakna juga diungkapkan oleh Novianto dkk. (2014, hlm. 287) yang mengungkapkan bahwa “WIM (Weight In Motion) adalah suatu proses penentuan berat dinamik dari suatu kendaraan
3
Widodo, 2015
UJI COBA DAN ANALISIS SENSOR SERAT OPTIK UNTUK WEIGHT IN MOTION (WIM) PADA REPLIKA KENDARAAN STATIS DAN DINAMIS
Universitas Pendidikan Indonesia | repository.upi.edu | perpustakaan.upi.edu
Teknologi Weight In Motion (WIM) mempunyai banyak keuntungan seperti yang telah diungkapkan bahwa “Beberapa keuntungan teknologi WIM antara lain lebih efisien dan menghemat waktu, khususnya pada saat lalu lintas sibuk” (Widiyatmoko, dkk. 2013, hlm. 168). Namun demikian, teknologi Weight In
Motion (WIM) mempunyai kelemahan sebagaimana yang telah diungkapkan
Novianto dkk. (2014, hlm. 287) bahwa “Kelemahan yang muncul dari penggunaan sensor diatas adalah mudah terkena korosi, kecepatan pengukuran yang rendah, dapat terkena interferensi elektromagnetik, dan memiliki akurasi yang rendah”.
Menurut Setiono dkk. (2013, hlm. 82) teknologi sensor berbasis serat optik bisa dijadikan sebagai solusi alternatif untuk mengatasi permasalahan pada teknologi
Weight In Motion (WIM). Telah diungkapkan bahwa “Serat optik adalah sebuah
kaca murni yang panjang dan tipis serta berdiameter dalam ukuran mikro” (Hanto, dkk. 2013, hlm. LPF1346-1). Menurut Hanafiah (2006, hlm.87) mengatakan bahwa “Serat optik merupakan media transmisi yang terbuat dari bahan kaca (glass) yang berkualitas, sehingga memiliki kehandalan dan kelebihan dibandingkan media transmisi yang terbuat dari bahan logam seperti kabel tembaga, kabel coaxial dan
stripline”.
Dalam pengukurannya serat optik memanfaatkan prinsip pembengkokan yang terjadi ketika sebuah beban berada tepat diatas serat optik sebagaimana yang telah diungkapkan oleh Setiono dkk. (2012, hlm 179) “Selain menjadi komponen penting dalam sistem komunikasi serat optik, serat optik juga digunakan dalam pengukuran berbasis serat optik, salah satunya dengan memanfaatkan prinsip mikrobending”. Selain itu Setiono dkk. (2013, hlm. 82) mengungkapkan bahwa “Mikrobending serat optik adalah suatu keadaan apabila serat optik berada dalam kondisi terjepit atau tertindih suatu beban maka didalam serat optik tersebut akan terjadi perubahan penjalaran cahaya yang mengakibatkan terjadi loss atau rugi-rugi transmisi cahaya”.
4
Widodo, 2015
UJI COBA DAN ANALISIS SENSOR SERAT OPTIK UNTUK WEIGHT IN MOTION (WIM) PADA REPLIKA KENDARAAN STATIS DAN DINAMIS
Universitas Pendidikan Indonesia | repository.upi.edu | perpustakaan.upi.edu
dapat menjadi alternatif untuk mengukur beban” (Hanto, dkk. 2013, hlm. LPF1346 -1). Beberapa keuntungan menggunakan sensor optik juga dikemukakan oleh Novianto dkk. (2014, hlm. 287) yang menyatakan bahwa “Beberapa keuntungan yang diperoleh dengan menggunakan sistem sensor serat optik adalah bersifat portabel, mempunyai biaya pemasangan yang rendah, tidak terganggu pada sistem interferensi electromagnetik, dan mampu mendeteksi kendaraan dengan kecepatan yang tinggi”. Selain itu juga diungkapkan bahwa “Penggunaan serat optik ini memiliki keunggulan dibanding dengan sensor-sensor sebelumnya diantaranya kebal terhadap gangguan gelombang elektromagnetik sehingga cocok untuk instalasi di area terbuka” (Widiyatmoko, dkk. 2013, hlm. 168).
Berdasarkan permasalahan yang dikemukaan di atas, penulis akan mengkaji dan melanjutkan penelitian sebelumnya yang dilakukan oleh Setiono dkk mengenai serat optik untuk pengukuran berat beban berjalan (Weight in Motion). Penulis akan melakukan pengukuran berat beban statis dan dinamis dengan menggunakan sensor serat optik dan timbangan digital. Timbangan digital digunakan sebagai pembanding dari hasil pengukuran pada sensor serat optik. Objek yang digunakan dalam penelitian ini yaitu replika kendaraan berupa sebuah miniatur truk. Dalam penelitian ini penulis juga menggunakan sensor kecepatan untuk mendeteksi kecepatan kendaraan yang sedang melaju. Pada akhirnya penulis mengadakan sebuah penelitian yang dituangkan dalam bentuk karya tulis dengan judul “Uji Coba dan Analisis Sensor Serat Optik untuk Weight In Motion (WIM) pada Replika Kendaraan Statis dan Dinamis”.
B. Rumusan Masalah Penelitian.
Berdasarkan latar belakang yang telah diuraikan diatas, maka penulis akan memfokuskan penelitian ini pada serat optik yang dapat digunakan sebagai sensor berat untuk Weight In Motion (WIM). Adapun permasalahan yang dapat dirumuskan penulis dari penelitian ini adalah sebagai berikut:
1. Bagaimana menentukan berat miniatur truk statis dan dinamis dengan menggunakan sensor serat optik?
5
Widodo, 2015
UJI COBA DAN ANALISIS SENSOR SERAT OPTIK UNTUK WEIGHT IN MOTION (WIM) PADA REPLIKA KENDARAAN STATIS DAN DINAMIS
Universitas Pendidikan Indonesia | repository.upi.edu | perpustakaan.upi.edu
3. Bagaimana pengaruh kecepatan terhadap berat miniatur truk dinamis?
C. Tujuan Penelitian
Adapun tujuan umum dari penelitian ini adalah untuk menetukan berat miniatur truk statis dan dinamis. Dari tujuan umum tersebut, penulis dapat merumuskan tujuan khusus dari penelitian ini yaitu untuk mengukur berat miniatur truk statis dan dinamis dengan menggunakan sensor serat optik.
D. Manfaat Penelitian
Dari hasil penelitian ini diharapkan dapat memberikan manfaat untuk berbagai pihak. Manfaat penelitian ini terbagi menjadi dua, yaitu manfaat secara teoritis dan manfaat secara praktis.
1. Manfaat teoritis
Secata teoritis, penelitian ini dapat memberikan manfaat bagi beberapa pihak- yang terkait terutama bagi para peneliti. Data hasil penelitian ini dapat dijadikan sebagai referensi atau pembanding bagi para peneliti untuk melakukan penelitian selanjutnya dalam mengembangkan sensor serat optik untuk Weight In Motion (WIM). Selain itu dapat memberikan informasi mengenai keakuratan sensor serat optik untuk Weight In Motion (WIM) pada miniatur truk statis dan dinamis.
2. Manfaat praktis
Secara praktis, penelitian ini dapat memberikan manfaat bagi beberapa pihak- yang terkait terutama bagi instansi atau lembaga yang membutuhkan jasa pengukuran berat kendaraan statis maupun dinamis seperti dinas angkutan jalan raya, dan sebagainya.
E. Struktur Organisasi Skripsi
Untuk memudahkan penulis dalam pemahaman dan pemecahan masalah secara sistematis, maka dibuatlah struktur organisasi skripsi dalam penelitian skripsi ini, adapun sistematikanya penulis menguraikan sebagai berikut:
BAB I PENDAHULUAN
Bab ini berisi latar belakang penelitian, rumusan masalah penelitian, tujuan penelitian, manfaat penelitian dan struktur organisasi skripsi.
6
Widodo, 2015
UJI COBA DAN ANALISIS SENSOR SERAT OPTIK UNTUK WEIGHT IN MOTION (WIM) PADA REPLIKA KENDARAAN STATIS DAN DINAMIS
Universitas Pendidikan Indonesia | repository.upi.edu | perpustakaan.upi.edu
Bab ini berisi kajian teoritis mengenai sensor serat optik untuk weight in motion (WIM) pada replika kendaraan statis dan dinamis diantaranya adalah serat optik, sensor serat optik base on microbending, berat kendaraan statis, dan berat kendaraan dinamis.
BAB III METODOLOGI PENELITIAN
Bab ini berisi penjabaran yang rinci mengenai metode penelitian diantaranya: metode penelitian, waktu dan tempat penelitian, alat dan bahan, dan langkah - langkah penelitian.
BAB IV HASIL DAN PEMBAHASAN
Bab ini berisi tentang temuan penelitian yang dilakukan oleh penulis dan pembahasan dari hasil penelitian dari penulis.
BAB V KESIMPULAN DAN SARAN
Widodo, 2015
UJI COBA DAN ANALISIS SENSOR SERAT OPTIK UNTUK WEIGHT IN MOTION (WIM) PADA REPLIKA KENDARAAN STATIS DAN DINAMIS
Universitas Pendidikan Indonesia | repository.upi.edu | perpustakaan.upi.edu
BAB III
METODOLOGI PENELITIAN
A. Metode Penelitian
Metode yang digunakan dalam penelitian sensor serat optik untuk Weight In
Motion (WIM) pada replika kendaraan statis dan dinamis adalah dengan melakukan
studi literatur dan melakukan percobaan di Laboratorium. Adapun tahapan yang digunakan dalam melakukan penelitian ini dapat digambarkan sebagai berikut :
B. Waktu dan Tempat Penelitian
Penelitian ini dilaksanakan pada :
Waktu Pelaksanaan : Maret – Juni 2015
Tempat Pelaksanaan : Laboratorium Fiber Optik Pusat Penelitian Fisika - Studi literatur
Pengukuran berat miniatur truk dengan menggunakan timbangan
Pengujian daya optik pada sensor serat optik
Pengujian tegangan keluaran pada sensor serat optik
Pengukuran tegangan keluaran pada roda miniatur truk dengan menggunakan sensor serat optik
Karakterisasi sensor serat optik
21
Widodo, 2015
UJI COBA DAN ANALISIS SENSOR SERAT OPTIK UNTUK WEIGHT IN MOTION (WIM) PADA REPLIKA KENDARAAN STATIS DAN DINAMIS
Universitas Pendidikan Indonesia | repository.upi.edu | perpustakaan.upi.edu
LIPI, Kawasan PUSPIPTEK Serpong Kota Tangerang Selatan, Banten 15314 No telepon (021) 7560570.
C. Alat dan Bahan
Pada penelitian ini penulis menggunakan beberapa alat dan bahan diantaranya adalah sebagai berikut :
1. Light Emitting Diode (LED)
Light Emitting Diode (LED) yang ditunjukkan pada gambar 3.1. digunakan
sebagai sumber cahaya yang dilewatkan pada kabel serat optik. Pada penelitian ini LED menggunakan stabilized light source MG9001A jenis MG0917D. Cahaya dari
stabilized light source MG9001A memiliki wavelength 1310 nm, output power -35
dBm (GI) / -50 dBm (SM), attenuation setting range 0-6 dB, 0,01 dB steps.
Gambar 3.1. Stabilized Light Source MG9001A 2. Photodetector
Photodetector digunakan sebagai penguat operasional sinyal dari sumber
cahaya LED. Pada penelitian ini photodetector yang digunakan adalah ThorLabs PDA50B-EC seperti yang terlihat pada gambar 3.2. ThorLabs PDA50B-EC mempunyai panjang gelombang 800-1800 nm, bandwidth range 460 kHz BW,
active area 19,6 mm2, Output ±12 VDC, 0,25 A.
Gambar 3.2. ThorLabs PDA50B-EC 3. Data Acquisition (DAQ)
Data Acquisition (DAQ) digunakan sebagai akuisisi data sinyal yang telah
22
Widodo, 2015
UJI COBA DAN ANALISIS SENSOR SERAT OPTIK UNTUK WEIGHT IN MOTION (WIM) PADA REPLIKA KENDARAAN STATIS DAN DINAMIS
Universitas Pendidikan Indonesia | repository.upi.edu | perpustakaan.upi.edu
ini akuisisi data menggunakan DT9816 seperti yang terlihat pada gambar 3.3. DT9816 mempunyai sampling rate hingga 750 kS/s per channel dan resolusi ADC 16 bit.
Gambar 3.3. DT9816 4. Komputer
Komputer yang digunakan telah dilengkapi dengan softwere weight in motion
sensor buatan Pusat Penelitian Fisika LIPI. Komputer seperti yang ditunjukkan
pada gambar 3.4. digunakan sebagai penampil hasil pengukuran dimana besaran yang ditampilkan pada komputer tersebut berupa nilai kecepatan dan nilai tegangan keluaran. Selain itu komputer juga digunakan sebagai penampil hasil pengukuran berat axle load roda miniatur truk pada timbangan digital.
Gambar 3.4. Komputer 5. Sensor Serat Optik
23
Widodo, 2015
UJI COBA DAN ANALISIS SENSOR SERAT OPTIK UNTUK WEIGHT IN MOTION (WIM) PADA REPLIKA KENDARAAN STATIS DAN DINAMIS
Universitas Pendidikan Indonesia | repository.upi.edu | perpustakaan.upi.edu
atau sejajar dengan panjang karet. Setelah itu meletakkan bending modulatotor berupa tusuk gigi melintang di atas serat optik dengan jarak antar tusuk giginya 1 mm. Tahap berikutnya yaitu melakukan pengecoran menggunakan Silicon rubber yang telah dicampur dengan menggunakan hardener. Setelah pengecoran selesai, sensor dibiarkan hingga mengeras dan siap digunakan.
bending modulator 1 mm karet serat optik
Gambar 3.5. Skema serat optik berbasis mikrobending
Skema sensor serat optik yang digunakan sebagai sensor berat kendaraan seperti yang ditunjukkan pada gambar 3.6.
Gambar 3.6. Skema sensor serat optik
Seberkas cahaya yang datang dari sebuah LED dengan panjang gelombang 1310 nm dilewatkan pada sebuah serat optik berbasis mikrobending. Serat optik tersebut akan menerima beban sehingga terjadi mikrobending yang menyebabkan intensitas cahaya setelah melalui serat optik tersebut menjadi berkurang. Intensitas cahaya LED ini dideteksi dan dikuatkan oleh photodetector. Output dari
photodetector ini berupa tegangan keluaran.
6. Power Meter
Power meter digunakan sebagai alat pengukur daya optik dari sumber cahaya LED yang merambat melalui serat optik. Pada penelitian ini power meter yang digunakan adalah jenis Optical Handy Power Meter ML9002A seperti yang terlihat pada gambar 3.7.
...
Serat optik berbasis
mikrobending Photodetector
24
Widodo, 2015
UJI COBA DAN ANALISIS SENSOR SERAT OPTIK UNTUK WEIGHT IN MOTION (WIM) PADA REPLIKA KENDARAAN STATIS DAN DINAMIS
Universitas Pendidikan Indonesia | repository.upi.edu | perpustakaan.upi.edu Gambar 3.7. Optical Handy Power Meter ML9002A 7. Miniatur truk
Miniatur truk seperti pada gambnar 3.8. digunakan sebagai objek pengukuran berat replika kendaraan statis dan dinamis. Miniatur truk yang digunakan pada penelitian ini memiliki panjang 84 cm, lebar 30 cm, dan tinggi 45 cm. Jarak antara roda depan dan roda belakang miniatur truk adalah 38 cm.
Gambar 3.8. Miniatur truk 8. Timbangan Digital
Timbangan digital digunakan sebagai pembanding hasil pengukuran berat miniatur truk statis dan dinamis menggunakan sensor serat optik. Timbangan digital pada gambar 3.9. merupakan produk PT. Kenko Elektric Indonesia yang memiliki kapasitas beban sebesar 200 kg. Berdasarkan permukaannya timbangan digital mempunyai panjang 51 cm, lebar 39 cm, tinggi 10 cm. Dengan menggunakan
softwere smartscale desktop, berat suatu beban dapat ditampilkan pada komputer.
Gambar 3.9 Timbangan Digital 9. Beban Statis
25
Widodo, 2015
UJI COBA DAN ANALISIS SENSOR SERAT OPTIK UNTUK WEIGHT IN MOTION (WIM) PADA REPLIKA KENDARAAN STATIS DAN DINAMIS
Universitas Pendidikan Indonesia | repository.upi.edu | perpustakaan.upi.edu
yang berbeda-beda. Pada pengujian ini digunakan 4 buah beban statis dimana berat tiap bebannya sebesar 20 kg.
Gambar 3.10. Beban statis
D. Langkah - Langkah Penelitian
Pada penelitian ini penulis melakukan beberapa tahapan diantaranya adalah sebagai berikut :
1. Studi Literatur
Pada tahapan ini penulis mengumpulkan sumber bacaan yang bisa dijadikan sebagai referensi yang dapat mendukung penelitian penulis. Sumber bacaan tersebut berupa media cetak dan media elektronik.
2. Pengukuran Berat Miniatur Truk dengan Menggunakan Timbangan
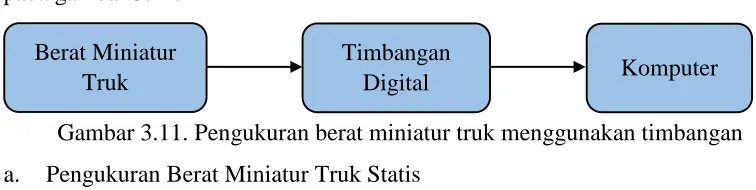
Pengukuran ini dilakukan untuk mengetahui berat total miniatur truk dengan menggunakan timbangan. Pengukuran ini dilakukan pada miniatur truk statis dan dinamis. Pada pengukuran ini penulis membuat rangkaian seperti pada gambar 3.11.
Gambar 3.11. Pengukuran berat miniatur truk menggunakan timbangan a. Pengukuran Berat Miniatur Truk Statis
Pengukuran berat miniatur truk statis dilakukan dengan cara meletakkan roda depan dan roda belakang miniatur truk secara bergantian di atas timbangan digital. Timbangan digital akan mendeteksi berat axle load roda depan dan berat axle load roda belakang miniatur truk. Data dari timbangan digital akan dikirimkan ke komputer dengan menggunakan kabel RS232 sehingga berat axle load roda depan dan roda belakang miniatur truk dapat ditampilkan pada komputer. Untuk mengetahui berat total miniatur truk dapat dilakukan dengan menjumlahkan berat axle load roda depan dan berat axle
load roda belakang dari miniatur truk tersebut. Pengukuran berat miniatur truk
Timbangan
Digital Komputer
26
Widodo, 2015
UJI COBA DAN ANALISIS SENSOR SERAT OPTIK UNTUK WEIGHT IN MOTION (WIM) PADA REPLIKA KENDARAAN STATIS DAN DINAMIS
Universitas Pendidikan Indonesia | repository.upi.edu | perpustakaan.upi.edu
statis dilakukan dalam 3 keadaan, keadaan pertama yaitu miniatur truk tanpa muatan, keadaan kedua yaitu miniatur truk yang ditambahkan muatan 20 kg, kondisi ketiga yaitu miniatur truk yang ditambahkan muatan 40 kg.
b. Pengukuran Berat Miniatur Truk Dinamis
Pengukuran berat miniatur truk dinamis dapat dilakukan dengan cara mendorong miniatur truk sehingga melaju di atas lintasan. Di tengah lintasan tersebut diletakkan sebuah timbangan digital. Timbangan digital akan mengukur berat axle load roda depan dan berat axle load roda belakang miniatur truk selama roda tersebut berada di atas timbangan digital. Data dari timbangan digital akan dikirimkan ke komputer dengan menggunakan kabel RS232 sehingga berat roda depan dan roda belakang miniatur truk dapat ditampilkan pada komputer. Untuk mengetahui berat total miniatur truk dalam keadaan dinamis dapat dilakukan dengan menjumlahkan berat roda depan dan berat roda belakang dari miniatur truk tersebut.
Pengukuran berat miniatur truk dinamis dilakukan dalam 3 keadaan, keadaan pertama yaitu miniatur truk tanpa muatan, keadaan kedua yaitu miniatur truk ditambahkan muatan 20 kg, kondisi ketiga yaitu miniatur truk ditambahkan muatan 40 kg. Pada masing-masing keadaan tersebut miniatur truk di dorong dengan kecepatan mendekati 0,5 km/jam, 1 km/jam, 1,5 km/jam, 2 km/jam, dan 2,5 km/jam.
3. Pengujian Daya Optik pada Sensor Serat Optik
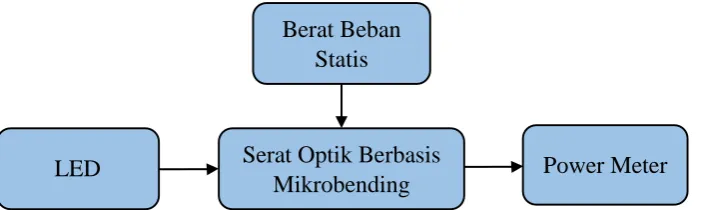
Pengujian ini dilakukan untuk melakukan uji kelayakan sensor serat optik dengan menganalisis kelinieritasan hubungan antara daya optik terhadap variasi beban statisnya. Dalam melakukan pengujian ini penulis membuat rangkaian seperti gambar 3.12.
Gambar 3.12. Pengujian daya optik pada serat optik berbasis mikrobending Berat Beban
Statis
LED Serat Optik Berbasis Power Meter
27
Widodo, 2015
UJI COBA DAN ANALISIS SENSOR SERAT OPTIK UNTUK WEIGHT IN MOTION (WIM) PADA REPLIKA KENDARAAN STATIS DAN DINAMIS
Universitas Pendidikan Indonesia | repository.upi.edu | perpustakaan.upi.edu
Seberkas cahaya yang datang dari sebuah LED dengan panjang gelombang 1310 nm dilewatkan pada sebuah serat optik berbasis mikrobending. Di atas serat optik tersebut diletakkan sebuah beban statis yang beratnya bervariasi. Akibat variasi beban statis menyebabkan terjadinya mikrobending sehingga besar intensitas cahayanya bervariasi. Besar intensitas cahaya dapat merepresentaikan besar daya optiknya. Besarnya daya optik akan ditampilkan pada power meter.
Pada proses pengambilan datanya, mula-mula melakukan pengukuran daya optik ketika di atas sensor serat optik tidak ada beban statis. Selanjutnya melakukan pengukuran daya optik ketika di atas sensor serat optik diletakkan beban statis dengan berat 20 kg, 40 kg, 60 kg, dan 80 kg. Dari data tersebut maka dapat diperoleh grafik antara besarnya daya optik terhadap variasi bebannya.
4. Pengujian Tegangan Keluaran pada Sensor Serat Optik
Pengujian ini dilakukan untuk menguji kelayakan sensor serat optik dengan menganalisis respon tegangan keluaran terhadap variasi berat beban statisnya. Dalam pengujian ini penulis membuat rangkaian seperti diagram blok yang ditunjukkan pada gambar 3.13.
Gambar 3.13. Pengujian tegangan keluaran pada sensor serat optik Sensor serat optik akan mendeteksi berat beban yang diletakkan di atasnya. Akibat beban tersebut menyebabkan terjadinya mikrobending sehingga besar intensitas cahayanya berkurang. Sinyal dari sensor serat optik akan dikonversi menjadi sinyal digital dan akan diolah dengan menggunakan akuisisi data (DAQ). Dari hasil akuisisi data, besarnya tegangan keluaran akan ditampilkan pada komputer untuk setiap berat beban statisnya.
28
Widodo, 2015
UJI COBA DAN ANALISIS SENSOR SERAT OPTIK UNTUK WEIGHT IN MOTION (WIM) PADA REPLIKA KENDARAAN STATIS DAN DINAMIS
Universitas Pendidikan Indonesia | repository.upi.edu | perpustakaan.upi.edu
tersebut maka dapat diperoleh grafik antara besarnya tegangan keluaran terhadap variasi bebannya.
5. Pengukuran Tegangan Keluaran pada Roda Miniatur Truk dengan Menggunakan Sensor Serat Optik
Pengukuran ini dilakukan untuk mengetahui besarnya tegangan keluaran miniatur truk baik dalam keadaan statis maupun dalam keadaan dinamis. Dalam melakukan pengukuran ini penulis membuat rangkaian seperti yang telah ditunjukkan pada gambar 3.14.
Gambar 3.14. Pengukuran tegangan keluaran pada roda miniatur truk dengan menggunakan sensor serat optik.
a. Pengukuran Tegangan keluaran pada roda Miniatur Truk Statis
Sensor serat optik akan mendeteksi berat beban yang diletakkan di atasnya. Akibat beban tersebut menyebabkan terjadinya mikrobending sehingga besar intensitas cahayanya berkurang. Sinyal dari sensor serat optik akan dikonversi menjadi sinyal digital dan akan diolah dengan menggunakan DAQ. Besarnya tegangan keluaran untuk axle load roda depan dan axle load roda belakang miniatur truk akan ditampilkan pada komputer. Tegangan keluaran total miniatur truk yaitu jumlah tegangan keluaran untuk axle load roda depan dan
axle load roda belakang dari miniatur truk tersebut. Pengukuran berat miniatur
truk statis dilakukan dalam 3 keadaan, keadaan pertama yaitu miniatur truk tanpa muatan, keadaan kedua yaitu miniatur truk yang ditambahkan muatan 20 kg, kondisi ketiga yaitu miniatur truk yang ditambahkan muatan 40 kg. b. Pengukuran Tegangan Keluaran pada Roda Miniatur Truk Dinamis
29
Widodo, 2015
UJI COBA DAN ANALISIS SENSOR SERAT OPTIK UNTUK WEIGHT IN MOTION (WIM) PADA REPLIKA KENDARAAN STATIS DAN DINAMIS
Universitas Pendidikan Indonesia | repository.upi.edu | perpustakaan.upi.edu
miniatur truk yaitu jumlah tegangan keluaran untuk axle load roda depan dan
axle load roda belakang dari miniatur truk.
Pengukuran berat miniatur truk dinamis dilakukan dalam 3 keadaan, keadaan pertama yaitu miniatur truk tanpa muatan, keadaan kedua yaitu miniatur truk ditambahkan muatan 20 kg, kondisi ketiga yaitu miniatur truk ditambahkan muatan 40 kg. Pada masing-masing keadaan tersebut miniatur truk didorong dengan kecepatan mendekati 0,5 km/jam, 1 km/jam, 1,5 km/jam, 2 km/jam, dan 2,5 km/jam. Besarnya kecepatan miniatur truk tersebut dapat dideteksi dengan menggunakan sensor kecepatan yang dipasang di bawah lintasan.
6. Karakterisasi Sensor Serat Optik
Karakterisasi dilakukan pada sensor serat optik yang telah dibuat sebelum sensor tersebut digunakan dalam pengukuran. Pada karakterisasi ini dilakukan pembandingan hasil pengukuran berat miniatur truk dengan menggunakan sensor dan hasil pengukuran berat miniatur truk dengan menggunakan timbangan. Mula-mula dilakukan pembandingan hasil pengukuran berat dengan menggunakan sensor dan timbangan untuk miniatur truk dalam keadaan statis, baik miniatur truk tanpa muatan, miniatur truk bermuatan 20 kg, dan miniatur truk bermuatan truk 40 kg. Dari hasil pembandingan tersebut didapatkan konversi nilai tegangan keluaran terhadap besaran berat miniatur truk tersebut untuk setiap keadaannya. Sehingga didapatkan konversi rata-rata nilai tegangan keluaran terhadap rata-rata besaran berat miniatur truk dari tiga keadaan tersebut.
30
Widodo, 2015
UJI COBA DAN ANALISIS SENSOR SERAT OPTIK UNTUK WEIGHT IN MOTION (WIM) PADA REPLIKA KENDARAAN STATIS DAN DINAMIS
Universitas Pendidikan Indonesia | repository.upi.edu | perpustakaan.upi.edu
pembandingan tersebut maka didapatkan hubungan antara berat miniatur truk untuk setiap kecepatannya sehingga didapatkan konversi rata-rata nilai kecepatan terhadap rata-rata besaran berat miniatur truk tersebut. Dari hasil karakterisasi sensor serat optik maka akan didapatkan persamaan untuk menghitung berat miniatur truk dan persamaan yang didapatkan tersebut hanya berlaku untuk pengukuran berat miniatur truk menggunakan sensor ini. 7. Pengujian Tegangan Keluaran pada Roda Miniatur Truk Dinamis dengan
Menggunakan Sensor Serat Optik
Widodo, 2015
UJI COBA DAN ANALISIS SENSOR SERAT OPTIK UNTUK WEIGHT IN MOTION (WIM) PADA REPLIKA KENDARAAN STATIS DAN DINAMIS
Universitas Pendidikan Indonesia | repository.upi.edu | perpustakaan.upi.edu
BAB V
KESIMPULAN DAN SARAN
A. KESIMPULAN
Pada penelitian ini diperoleh bahwa untuk mengukur berat miniatur truk statis dan dinamis dapat menggunakan persamaan yang didapatkan dari hasil karakterisasi sensor serat optik yaitu BT = (D + B) volt x 11,8 kg/volt + 9,66 kg. Sensor serat optik mampu merespon baik untuk berat miniatur truk antara 22,83 kg sampai 62,85 kg dengan kecepatan mendekati 0,5 km/jam sampai 1 km/jam. Faktor kecepatan mempengaruhi berat miniatur truk yang terukur. Sensor serat optik yang digunakan belum bisa merespon beban di atasnya secara konsisten terutama untuk kecepatan di atas 1 km/jam. Pada nilai kecepatan maksimum 2,5 km/jam berat miniatur truk dinamis fluktuatif, hal ini dikarenakan percepatan yang diberikan pada miniatur truk tidak stabil, ketinggian sensor serat optik terhadap lintasan tidak rata, dan respon sensor serat optik pada setiap titik tekannya berbeda. Hasil pengujian berat kendaraan pada miniatur truk tanpa muatan, miniatur truk dengan muatan 20 kg, dan miniatur truk dengan muatan 40 kg menunjukkan error masing-masing 0,16 %, 2,26 %, dan 7,3 %. Dengan error yang relatif kecil ini maka sensor serat optik dapat dijadikan sebagai alternatif lain dalam pengukuran berat kendaraan statis maupun dinamis.
B. SARAN
Widodo, 2015
UJI COBA DAN ANALISIS SENSOR SERAT OPTIK UNTUK WEIGHT IN MOTION (WIM) PADA REPLIKA KENDARAAN STATIS DAN DINAMIS
Universitas Pendidikan Indonesia | repository.upi.edu | perpustakaan.upi.edu
DAFTAR PUSTAKA
Bolton, W. (2006). Sistem instrumentasi dan sistem kontrol. Jakarta: Erlangga. Hanafiah, A. (2006). Teknologi serat optik. Jurnal Sistem Teknik Industri, 07 (01),
hlm. 87-91.
Hanto, D. dkk. (2013). Analisa pengaruh mikrobending untuk aplikasi pada sensor beban berbasis serat optik. Seminar Nasional 2nd Lontar Physics Forum 2013 (hlm. LPF1346-1 - LPF1346-4), Medan.
Hidayat, W. dkk. (2014). Analisa cahaya keluaran pada serat optik terbengkokkan untuk aplikasi weight in motion. Prosiding Seminar Nasional Sains dan
Pendidikan Sains IX. Fakultas Sains dan Matematika, UKSW (hlm 300-304),
Salatiga.
Idham, M. (2012). Analisis dampak serta penanganan beban muatan lebih kendaraan berat di provinsi Riau. Jurnal Inovtek, 02 (01), hlm. 87-95. Ilham, A. A., & Suwoyo. (2013). Rancang bangun sistem otomatisasi pengawasan
jembatan timbang dengan mikrokontroler AT89S51. Jurnal Penelitian
Enjiniring Fakultas Teknik, Universitas Hasanuddin, (hlm. 18-20),
Makassar.
Jazar, R. N. (2008). vehicle dynamics : theory and application. Berlin: Spinger. Mitschke, F. (2009). Fiber Optik. Berlin: Springer.
Novianto, H. dkk. (2014). Pembuatan prototipe sensor beban bergerak berbasis serat optik berbentuk koil dengan interaksi arduino uno dan labview. Prosiding
Pertemuan Ilmiah XXVIII HFI Jateng & DIY (hlm 287-290), Yogyakarta.
Nugraha, A. R. (2006). Serat Optics. Yogyakarta: C. V Andi OFFSET.
Praja, F. G. (2013). Analisis perhitungan dan pengukuran transmisi jaringan serat optik Telkomsel regional Jawa Tengah. Jurnal Reka Elkomika, 01 (01), hlm. 42-51.
62
Widodo, 2015
UJI COBA DAN ANALISIS SENSOR SERAT OPTIK UNTUK WEIGHT IN MOTION (WIM) PADA REPLIKA KENDARAAN STATIS DAN DINAMIS
Universitas Pendidikan Indonesia | repository.upi.edu | perpustakaan.upi.edu
Penelitian, Pendidikan dan Penerapan MIPA, Fakultas MIPA, Universitas Negeri Yogyakarta (hlm. F1-F5), Yogyakarta .
Saputro, N. A. (2011). Fabrikasi dan karakterisasi serat optik dengan metode
pre-casting. (Skripsi). Fakultas Matematika dan Ilmu Pengetahuan Alam,
Universitas Sebelas Maret, Surakarta.
Setiono, A. dkk. (2013). Investasi sensor serat optik untuk aplikasi sistem Pengukuran berat beban dinamis (weight in motion). Telaah Jurnal Ilmu
Pengetahuan dan Teknologi, 31(01), hlm. 81-86.
Setiono, A. dkk. (2012). Kajian mikrobending sebagai sensor beban berbasis serat optik multimode. Prosiding Pertemuan Ilmiah XXVI HFI Jateng & DIY (hlm. 179-181), Yogyakarta.
Setiono, A & Widiyatmoko, B. (2012). Desain sensor beban kendaraan menggunakan teknik mikrobending serat optik. Telaah Jurnal Ilmu
Pengetahuan dan Teknologi, 30 (02), hlm 33 – 36.
Simatupang, R. H. H. dkk. (2008). Sistem informasi pengawasan kendaraan angkutan barang pada jembatan timbang untuk penentuan pelanggaran muatan lebih dan damage factor. Jurnal Forum Teknik Sipil, 17(2), hlm 822-831. Wadhana, E. K & Setijono, H. (2012). Analisa redaman serat optik terhadap kinerja
sistem komunikasi serat optik menggunakan metode optical link power budget.
Paper Serat Optik Intitut Teknologi Sepuluh November (hlm, 1-11), Surabaya.
Waluyo, T. B., & Suheri, A. (2009). Penggunaan serat optik ragam tunggal untuk transmisi data pengukuran. Jurnal Fisika Himpunan Fisika Indonesia, 09 (01), hlm. 20-28.
Widiyatmoko, B. dkk. (2013). Sistem pengukuran beban kendaraan berjalan berbasis serat optik. Prosiding Seminar Intensif Riset Sinas 2013. (hlm 167-171), Jakarta.