IMPLEMENTASI METODE IMPROVED ADAPTIVE GAUSSIAN MIXTURE MODEL
BACKGROUND SUBTRACTION DAN HAAR-LIKE FEATURES UNTUK
MENGANALISIS STATUS KEPADATAN KENDARAAN YANG MELINTAS DI SUATU
JALUR PADA LAMPU LALU LINTAS
Ade Romadhony1, Hamdy Nur Saidy2, Mahmud Dwi Sulistiyo3
1,2,3Prodi S1 Teknik Informatika, Fakultas Teknik Informatika, Universitas Telkom
1 [email protected] , 2[email protected], 3[email protected]
Abstrak
Metode analisis kepadatan kendaraan di suatu jalur pada persimpangan lampu lalu lintas menggunakan real
time video stream mempunyai banyak kendala. Kendala seperti penanganan terhadap berbagai kondisi cuaca
sehingga background tidak statis, bayangan yang bergerak yang juga dapat mengurangi keakurasian perhitungan sistem, serta tidak berjalannya sistem sesuai yang diinginkan ketika terjadi kemacetan. Sehingga diperlukan rancangan yang dapat menangani masalah ini.
Oleh karena itu pada penelitian ini dibangun sistem perhitungan jumlah kendaraan di suatu jalur pada persimpangan lampu lalu lintas berbasis real time video stream menggunakan penggabungan beberapa metode untuk mengangani masalah diatas. Sistem ini menggunakan kamera perekam yang dipasang pada suatu jalur dengan lokasi yang berdekatan dengan persimpangan lampu lalu lintas untuk menghitung jumlah kendaraan yang melintasi jalur tersebut. Pemrosesan gambar dilakukan per-frame menggunakan metode Improved Adaptive Gaussian Mixture Model Background Subtraction dan Haar-Like Features.
Dengan menggunakan metode tersebut, dilakukan tracking secara real-time objek bergerak pada background yang cenderung tidak statis yang disebaban karena cuaca serta pencahayaan yang berubah-ubah. Objek-objek yang telah berhasil di-tracking tersebut kemudian dihitung jika melintasi virtual detector. Metode
Haar-Like Features digunakan untuk mendeteksi terjadinya kemacetan yang terjadi pada jalur tersebut
dengan cara mendeteksi objek pada background model yang dibentuk oleh sistem. Pada tahapan akhir, jumlah kendaraan yang melintasi virtual detector ataupun dideteksi oleh mekanisme congestion detection diklasifikasikan kedalam 5 tingkat kepadatan untuk memberikan analisis terhadap tingat kepadatan untuk jalur tersebut untuk tiap state sekuens lampu lalu lintas. Hasil pengujian menunjukkan sistem yang dibangun dapat digunakan dengan baik untuk menghitung dan mengklasifikasikan jumlah kepadatan kendaraan yang melintas disuatu jalur secara real-time.
Kata kunci : Real Time Video Stream, Improved Adaptive GMM Background Subtraction, Haar-Like Features,
congestion detection, classification, virtual detector.
1. Pendahuluan
Lampu lalu lintas terutama pada perempatan jalan dimaksudkan untuk mengatur alur lalu lintas tetapi sering kali justru lampu lalu lintas ini yang menjadi salah satu sumber kemacetan. Pengaturan waktu pergantian lampu yang tidak sesuai inilah yang menjadi penyebab utamanya. Misal ketika suatu jalur yang sepi memiliki waktu berhenti sama dengan jalur yang padat. Hal ini secara logis tidak adil karena jalur yang padat seharusnya memiliki waktu berhenti lebih singkat dari jalur yang sepi. Polisi lalu lintas seringkali ditempatkan pada suatu jalur pada kondisi seperti itu. Tetapi hal ini tidak efisien dan membutuhkan sumber daya manusia yang banyak jika masalah ini terjadi dibanyak tempat.
Oleh karena itu dibutuhkan sistem yang akan mengatur secara otomatis penggantian waktu berhenti pada lampu lalu lintas. Sistem seperti ini membutuhkan suatu metode yang dapat menganalisis kepadatan kendaraan di suatu jalur pada persimpangan lampu lalu lintas. Metode analisis kepadatan kendaraan di suatu jalur pada persimpangan lampu lalu lintas menggunakan real time video stream menjadi solusi yang baik dikarenakan mempunyai banyak keuntungan, seperti informasi yang didapatkan akan jauh lebih banyak serta mudah dalam pemasangannya [1].
Akan tetapi metode ini mempunyai beberapa kendala seperti penanganan terhadap berbagai cuaca dan pencahayaan yang bervariasi sehingga background tidak statis, serta adanya bayangan yang bergerak yang dipengaruhi oleh angin dan factor-faktor lainnya [1].
Sehingga pada penelitian ini, beberapa metode dikombinasikan untuk menangani masalah seperti diatas. Sistem ini menggunakan kamera perekam yang dipasang dilokasi yang berdekatan dengan lampu lalu lintas untuk menghitung jumlah kendaraan pada satu sisi jalan. Pemrosesan gambar dilakukan per-frame menggunakan metode
Improved Adaptive Gaussian Mixture Model Background Subtraction [2] yang merupakan pengembangan dari
metode Adaptive Background Mixture Model [3] dan Adaptive Backround Estimation [1]. Tujuan utama kedua metode tersebut ialah melakukan tracking terhadap objek yang bergerak pada background yang tidak statis yang disebabkan oleh perubahan cuaca dan tingkat pencahayaan. Akan tetapi hal tersebut belum cukup karena sistem tidak akan berjalan optimal jika terjadi kemacetan di jalur tersebut. Sehingga dibutuhkan suatu metode lagi untuk mendeteksi terjadinya kemacetan. Metode yang digunakan untuk menangani masalah ini ialah metode Haar-like
Feature, yaitu metode object detection [4] yang akan mendeteksi mobil yang ada di frame Background sehingga
dapat dilakukan penanganan terhadap kemacetan. Dengan demikian masalah seperti kondisi cuaca serta pencahayaan yang bervariasi tidak akan mengganggu performansi sistem dan ketika terjadi kemacetan juga dapat ditangani.
. Pada penelitian ini, pemrosesan gambar dilakukan per-frame menggunakan metode Improved Adaptive
Gaussian Mixture Model Background Subtraction dan Haar-Like Features. Tracking objek bergerak dilakukan
secara real-time pada background yang cenderung tidak statis yang disebaban karena cuaca serta pencahayaan yang berubah-ubah. Objek-objek yang telah berhasil di-tracking tersebut kemudian dihitung jika melintasi virtual
detector. Metode Haar-Like Features digunakan untuk mendeteksi terjadinya kemacetan yang terjadi pada jalur
tersebut dengan cara mendeteksi objek pada background model yang dibentuk oleh sistem. Pada tahapan akhir, jumlah kendaraan yang melintasi virtual detector ataupun dideteksi oleh mekanisme congestion detection diklasifikasikan kedalam 5 tingkat kepadatan untuk memberikan analisis terhadap tingat kepadatan untuk jalur tersebut untuk tiap state sekuens lampu lalu lintas.
2. Dasar Teori
2.1 Adaptive Background
Adaptive Background pada [1] singkatnya adalah pendekatan yang dilakukan untuk membuat sistem belajar terhadap perubahan background yang diakibatkan perubahan cuaca ataupun perubahan intensitas pencahayaan. Cara kerjanya diasumsikan frame pertama pada video stream adalah Initial Backround. Jika terdapat kendaraan pada
frame pertama, hal ini dapat diatasi dengan operasi “Background Update”. Pada operasi background update, ketika
objek kendaraan pada frame selanjutnya bergerak, maka akan memicu pemanggilan operasi tersebut.
2.2 Improved Adaptive Gaussian Mixture Model Background Subtraction
Metode Adaptive Background [1] standar seperti yang dijelaskan pada sub bab 2.1 sangat efektif pada situasi objek bergerak secara terus-menerus dan sebagian besar background terlihat dengan signifikan disetiap waktu, hal ini tidak cukup kuat untuk menangani keadaan di mana banyak objek yang bergerak secara bersamaan terlebih di mana objek-objek tersebut bergerak lambat. Metode tersebut juga lambat dalam melakukan recovery terhadap
uncovered background, serta hanya memiliki satu predetermined threshold untuk keseluruhan kasus yang digunakan
[3] untuk menangani masalah ini digunakan Metode Adaptive Background mixture model [3]. Metode Improved
Adaptive Gaussian Mixture model sendiri ialah pengembangan metode Adaptive Background mixture model di mana
nilai komponen mixture per-piksel menjadi dinamis. Hal ini tentu menjadikan Metode ini sangat adaptif terhadap perubahan pencahayaan dan cuaca. Nilai komponen mixture per-piksel yang dinamis juga membuat waktu pemrosesan menjadi lebih efisien dan hasil segmentasi menjadi sedikit lebih baik [2].
Gaussian Mixture Model (GMM) adalah model statistik yang sering digunakan untuk clustering data [2]. Dalam
penelitian ini GMM pada metode Improved Adaptive Gaussian Mixture model digunakan utuk memodelkan nilai piksel dari data yang kemudian dijadikan acuan untuk menentukan nilai probabilitas piksel tersebut, apakah piksel tersebut termasuk bagian background atau foreground. Dalam metode Adaptive Gaussian mixture model perubahan pencahayaan yang dapat terjadi tiba-tiba, pergerakan objek kendaraan yang lambat dapat diatasi karena training set terus diperbaruhi untuk tiap sampel baru dalam jangka waktu T. Sehingga data Training XT adalah
𝑋 = {𝑥( ), . . . , 𝑥( )} (1)
Untuk setiap sample dilakukan update XT dan menghitung ulang nilai probabilitas
𝑝̂(𝑥⃗|𝑋 , 𝐵𝐺). Tetapi dalam training set mungkin saja terdapat beberapa nilai piksel yang merupakan bagian objek
foreground sehingga
𝑝̂(𝑥⃗|𝑋 , 𝐵𝐺)
menjadi𝑝̂(𝑥⃗|𝑋 , 𝐵𝐺 + 𝐹𝐺). Untuk menghitung
𝑝̂(𝑥⃗|𝑋 , 𝐵𝐺), perlu diamati biasanya objek foreground akan
direpresentasikan dengan beberapa jumlah kluster yang memiliki bobot 𝜋 yang kecil. Sebagai contoh, jika sebuah objek masuk kedalam scene dan tetap statik untuk beberapa waktu, objek tersebut bisa saja membentuk suatu kluster stabil. Karena background yang lama tertutupi (occluded) dengan objek baru. Bobot phi B+1 dari kluster baru akan terus bertambah. Jika objek tersebut tetap statis dalam waktu lama, bobot dari objek baru tersebut menjadi lebih besar dari 𝑐 dan akan dikateorikan sebagai background oleh sistem. Untuk menghitung suatu objek baru dikatakanbackground, objek tersebut harus static dalam
𝑙𝑜𝑔(1 − 𝑐 )/𝑙𝑜𝑔(1 − 𝛼)
frame. Sebagai contoh𝑐
=0,1 dan𝛼=0,001, sehingga diperoleh nilai 105 frame.
Untuk setiap sampel baru, variable kepemilikan (𝑜( )) sampel untuk komponen mixture dengan jarak Mahalanobis ‘terdekat’ di set ke 1 untuk kompnen tersebut, sedangkan 0 untuk komponen lain. Kemudian nilai
𝑝̂(𝑥⃗|𝑋 , 𝐵𝐺) diestimasi ulang dengan rumus update rekursif berikut [5]:
𝜋 ← 𝜋 + 𝛼(𝑜( )
− 𝜋 ) (2)
𝜇⃗ ← 𝜇⃗ + 𝑜( )(𝛼/𝜋 )𝛿⃗
(3) 𝜎 ← 𝜎 + 𝑜( )𝛿⃗ 𝛿⃗ − 𝜎
(2.9) (4)
Di mana, 𝛿⃗ = 𝑥⃗( )− 𝜇⃗
dan 𝛼=0,001 .Nilai 𝜋 , 𝜇⃗ , 𝜎 yang baru dimasukkan kerumus sebelumnya:𝑝̂(𝑥⃗|𝑋 , 𝐵𝐺) ~ ∑
𝜋 𝒩(𝑥⃗; 𝜇⃗ , 𝜎 𝐼) (5)
Dengan adanya konstanta𝛼 yang berguna membatasi pengaruh data yang lama terhadap model background.
Komponen mixture ke-m yang tidak memiliki sampel baru dalam waktu yang lama atau dengan kata lain “old data” menyebabkan bobot 𝜋 berkurang secara eksponensial.2.3 Haar-like Feature
Haar Feature adalah fitur yang didasarkan pada metode Haar Wavelet. Haar Wavelet adalah gelombang
tunggal bujur sangkar (satu interval tinggi dan satu interval rendah). Untuk dua dimensi, satu terang dan satu gelap. Selanjutnya kombinasi-kombinasi kotak yang digunakan untuk pendeteksian objek visual yang lebih baik. Setiap
Haar-like feature terdiri dari gabungan kotak - kotak hitam dan putih.Adanya fitur Haar ditentukan dengan cara
mengurangi rata-rata piksel pada daerah gelap dari rata-rata piksel pada daerah terang. Jika nilai perbedaannya itu diatas nilai ambang atau treshold, maka dapat dikatakan bahwa fitur tersebut ada.
Integral Image digunakan untuk menentukan ada atau tidaknya dari ratusan fitur Haar pada sebuah gambar dan
pada skala yang berbeda secara efisien. Pada umumnya, pengintegrasian tersebut berarti menambahkan unit-unit kecil secara bersamaan. Dalam hal ini unit-unit kecil tersebut adalah nilai-nilai piksel. Nilai integral untuk masing-masing piksel adalah jumlah dari semua piksel-piksel dari atas sampai bawah. Dimulai dari kiri atas sampai kanan bawah, keseluruhan gambar itu dapat dijumlahkan dengan beberapa operasi bilangan bulat per piksel. Sementara cascade classifier adalah sebuah rantai stage classifier, di mana setiap stage classifier digunakan untuk mendeteksi apakah didalam image sub window terdapat obyek yang diinginkan (object of interest).
3. Implementasi dan Pengujian 3.1 Implementasi
Pre-processing mencakup Gaussian blur pada masukan frame, background substraction, dan shadow elimination. Pada akhir tahap shadow elimination, semua objek bergerak akan dideteksi dan dikategorikan foreground. Sehingga diperlukan tahap post-processing yaitu operasi erosi terhadap foreground untuk
mengeliminasi foreground yang sangat kecil dan mempertegas objek yang berukuran cukup besar yang dapat dikategorikan sebagai vehicle dengan menerapkan operasi dilasi terhadap frame. Pada tahap selanjutnya, jumlah kendaraan yang melintas dihitung tetapi hal ini masih memiliki kelemahan yaitu tidak dapatnya sistem yang dibangun menghitung kendaraan saat terjadi kemacetan. Tahap selanjutnya dilaksanakan untuk mengatasi persoalan tersebut. Haar-like feature digunakan untuk melakukan congestion detection. Dengan cara melihat jumlah kendaraan yang tidak bergerak pada background untuk selanjutnya dapat dilakukan congestion handling.
Dengan melalui keseluruhan tahap tersebut, sistem yang dibangun akan mengeluarkan jumlah kendaraan yang melintas disuatu jalur disertai dengan penanganan terhadap kemacetan pada tiap state lampu lalu lintas. Nilai keluaran tersebut kemudian diklasifikasikan kedalam kelas-kelas kepadatan, untuk mengetahui kepadatan jalur tersebut berada di kelas kepadatan yang mana.
3.2 Pengujian
Terdapat tujuh ujuan pengujian pada penelitian ini. Pertama adalah mendapatkan nilai History dan
BackgroundRatio pada studi kasus yang memberikan error margin percentage terkecil. Kemudian mendapatkan nilai
nmixture, yaitu nilai maksimum komponen mixture yang dibolehkan pada studi kasus yang memberikan error
margin percentage terkecil. Terkait dengan shadow elimination, mendapatkan nilai FTau serta pengaruhnya pada
studi kasus yang memberikan error margin percentage terkecil. Dalam hal penghilangan noise, mendapatkan jumlah iterasi erosi dan dilasi yang tepat untuk menghilangkan noise tanpa mengganggu piksel ROI dan mempertegas ROI pada studi kasus yang memberikan error margin percentage terkecil. Lalu untuk tiap studi kasus, mendapatkan nilai
error margin percentage & Average Process Time/frame sistem dengan menggunkan parameter yang sudah
didapatkan dari skenario pengujian sebelumnya. Yang terakhir adalah mengetahui apakah sistem dapat mendeteksi kemacetan pada studi kasus yang diberikan dan mengetahui performansi sistem dalam pengklasifikasian kepadatan kendaraan.
3.2.1 Hasil Pengujian Nilai History dan Background Ratio
Pengujian ke-1 dilakukan dengan menginisiasi nilai
𝑐
1=0,1;𝑐
=0,2;𝑐
3=0,3;𝑐
4=0,4;; dengan α = 0.001. Formula yang digunakan adalah :BackgroundRation = 1- 𝑐 n Historyn = log(1- 𝑐 n)/log(1-α)
Nilai history yang diperoleh adalah :
Nilai 1: 𝑐 1= 0.1, BackgroundRatio1= 0.9, History1= ~105
Nilai 2: 𝑐 2= 0.2, BackgroundRatio2= 0.8, History2= ~223
Nilai 3: 𝑐 3= 0.3, BackgroundRatio3= 0.7, History3= ~356
Nilai 4: 𝑐 4= 0.4, BackgroundRatio4= 0.6, History4= ~510
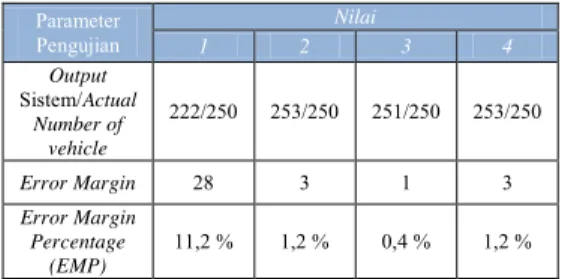
Tabel 1 Hasil pengujian tiap nilai cf, BackgroundRatio dan History sistem pada skenario ke-1 Parameter Pengujian Nilai 1 2 3 4 Output Sistem/Actual Number of vehicle 222/250 253/250 251/250 253/250 Error Margin 28 3 1 3 Error Margin Percentage (EMP) 11,2 % 1,2 % 0,4 % 1,2 %
Beradasarkan Hasil pengujian skenario ke-1 pada Tabel 1, terlihat bahwa Nilai 3: 𝑐 = 0.3, BackgroundRatio= 0.7,
3.2.2 Hasil Pengujian Nilai Nmixture
Pengujian ke-2 dilakukan dengan menggunakan 3 nilai nmixture yang berbeda pada studi kasus yang diberikan. Nilai nmixture yang diuji adalah: nmixture = {2,3,4}. Nilai keluaran pengujian ini ialah melihat Error margin
Percentage (EMP) sistem pada studi kasus ketika parameter nmixture yang diujikan, diterapkan ke sistem. Hasil
pengujian dapat dilihat pada Tabel 2.
Tabel 2 Hasil pengujian tiap nilai nmixture sistem pada skenario ke-2 Parameter Pengujian nmixture 2 3 4 Output Sistem/Actual Number of vehicle 230/250 251/250 255/250 Error Margin 20 1 5 Error Margin Percentage (EMP) 8% 0,4% 2%
Berdasarkan Hasil pengujian skenario ke-2 pada Tabel 2, terlihat bahwa nilai nmixture= 3 pada studi kasus yang diberikan, memberikan nilai EMP terkecil yaitu 0,4%.
3.2.3 Hasil Pengujian Nilai FTau
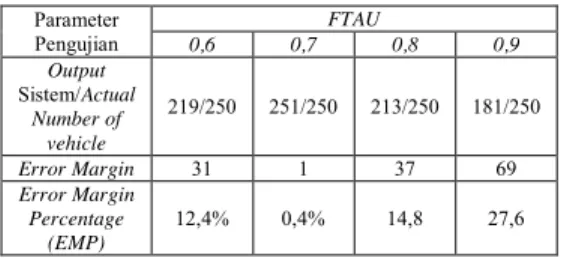
Pengujian ketiga dilakukan dengan menggunakan 4 nilai FTau yang berbeda pada studi kasus yang diberikan. Hal ini dimaksudkan untuk mendapatkan nilai FTau yaitu nilai derajat pencahayaan suatu piksel sehingga piksel tersebut dikategorikan sebagai bayangan. Dengan 4 nilai FTau yang berbeda diharapkan ditemunkan nilai FTau EMP terkecil. Nilai yang akan diuji: FTau = {0,6; 0,7; 0,8; 0,9}. Nilai keluaran pengujian ini ialah melihat Error
Margin Percentage (EMP) sistem pada studi kasus ketika parameter FTau yang diujikan, diterapkan ke sistem. Hasil
pengujian dapat dilihat pada Tabel 3.
Tabel 3 Hasil pengujian tiap nilai FTau sistem pada skenario ketiga Parameter Pengujian FTAU 0,6 0,7 0,8 0,9 Output Sistem/Actual Number of vehicle 219/250 251/250 213/250 181/250 Error Margin 31 1 37 69 Error Margin Percentage (EMP) 12,4% 0,4% 14,8 27,6
Berdasarkan hasil pengujian skenario ketiga pada Tabel 3, terlihat bahwa nilai FTau=0,7 pada studi kasus yang diberikan, memberikan nilai EMP terkecil yaitu 0,4 %.
3.2.4 Hasil Pengujian Nilai Iterasi Dilasi dan Erosi
Pengujian ke-4 dilakukan untuk mencari jumlah iterasi operasi dilasi dan erosi pada citra foreground sampel untuk mereduksi noise dan mempertegas ROI. Nilai keluaran pengujian ini ialah melihat Error margin Percentage
(EMP) sistem pada studi kasus ketika parameter ID & IE yang diujikan, diterapkan ke sistem. Hasil pengujian dapat
dilihat pada Tabel 4.
Tabel 4 Hasil pengujian tiap nilai ID & IE sistem pada skenario ke-4
Parameter Pengujian Nilai 1 2 3 4 5 6 7 8 9 Output Sistem/Actual 168 144 202 230 248 250 252 230 248
Number of vehicle Error Margin 82 106 48 20 2 0 2 20 2 Error Margin Percentage (EMP) 32,8 42,4% 19,2% 8% 0,8% 0% 0,8% 8% 0,8%
Berdasarkan hasil pengujian skenario keempat pada Tabel 4, terlihat bahwa nilai 6 yaitu ID = 6 dan IE = 2 pada studi kasus yang diberikan, memberikan nilai EMP terkecil yaitu 0 %.
3.2.5 Error Margin System
Pengujian ini dilakukan untuk mengukur performansi optimum sistem yang dibangun yaitu Error Margin
Percentage (EMP), Average Error Margin Percentage dan Average prosess time/frame yang dihasilkan sistem pada
3 studi kasus yang diberikan. Pengujian ini dilakukan dengan menggunakan parameter-parameter optimum yang telah ditemukan pada skenario pengujian sebelumnya.
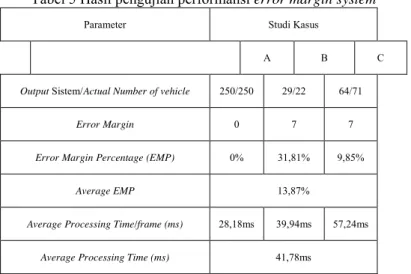
Tabel 5 Hasil pengujian performansi error margin system
Parameter Studi Kasus
A B C
Output Sistem/Actual Number of vehicle 250/250 29/22 64/71
Error Margin 0 7 7
Error Margin Percentage (EMP) 0% 31,81% 9,85%
Average EMP 13,87%
Average Processing Time/frame (ms) 28,18ms 39,94ms 57,24ms Average Processing Time (ms) 41,78ms
Pengujian dilakukan menggunakan 3 studi kasus. Keluaran yang diinginkan adalah: Error Margin = |Keluaran sistem – Actual Number of vehicle|
Error Margin Percentage (EMP) = ((Error Margin/ Actual Number of vehicle)*100) % Average Processing time/frame = Total Frame Excecution time/total frame ms
Hasil pengujian dapat dilihat pada Tabel 5. Berdasarkan pengujian error margin system, diperoleh nilai Average EMP 13,18% dan waktu pemrosesan per-frame dengan rata-rata ialah 41,78ms. Dengan nilai EMP terkecil pada studi kasus A dengan EMP 0%, dan waktu pemrosesan per-frame terbaik pada studi kasus A yaitu 28,18ms.
3.2.6 Congestion Detection dan Performansi Sistem
Pengujian congestion detection dilakukan menggunakan 2 studi kasus, yaitu studi kasus A dan D. Hasil pengujian dapat dilihat pada Tabel 6.
Tabel 6 Hasil pengujian congestion detection Parameter
Pengujian D Studi Kasus A Background
model
Berdasarkan hasil pengujian pada Tabel 6, terlihat bahwa sistem mampu mendeteksi terjadinya kemacetan ketika terdapat gambar mobil pada background model.
Pengujian selanjutnya adalah pengujian untuk mengukur performansi sistem dalam melakukan klasifikasi tingkat kepadatan kendaraan. Pengujian dilakukan menggunakan 3 studi kasus, yaitu studi kasus A,B, dan C. Hasil pengujian dapat dilihat pada Tabel 7.
Tabel 7 Hasil pengukuran performansi sistem Studi kasus Hasil Pegujian
Real Output A Sangat Padat Sangat Padat
B Sedang Sedang
C Sangat Padat Sangat Padat
Beradasarkan hasil pengujian pada Tabel 7, terlihat bahwa sistem mampu melakukan klasifikasi tingkat kepadatan kendaraan dengan sangat baik. Terlihat pengklasifikasian yang dilakukan sistem tepat untuk setiap studi kasus yang diberikan.
4. Kesimpulan
Dari hasil analisis yang diperoleh dari hasil pengujian, dapat disimpulkan bahwa sistem ini dapat digunakan dengan baik untuk menghitung dan mengklasifikasikan jumlah kepadatan kendaraan yang melintas disuatu jalur secara real-time. Hal tersbeut berdasarkan nilai rata-rata error margin yang baik (13.8%) serta waktu pemrosesan per-frame yang responsif. Kemudian pengklasifikasian hasil perhitungan ke kelas-kelas kepadatan juga menunjukkan hasil yang sangat baik, karena kelas kepadatan yang diidentifikasi sama dengan keadaan sebenarnya. Kendala utama pada sistem ini ialah tidak adanya penanganan occlusion, mengingat jalan Indonesia yang cenderung padat dan tidak teratur. Sehingga penempatan kamera yang baik sangat penting untuk mengurangi terjadinya
occlusion. Kendala lainnya ialah metode perhitungan yang kurang sempurna dan warna kendaraan yang serupa
dengan permukaan jalan dapat secara signifikan mengurangi keakurasian perhitungan yang dilakukan.
Setelah dilakukan analisis dan evaluasi terhadap metode yang digunakan dalam penelitian ini, terdapat peluang untuk pengembangan berikutnya. Yang pertama adalah penanganan terhadap occlusion baik secara penuh maupun parsial, hal ini dapat meningkatkan performansi sistem secara drastis. Untuk menangani occlusion secara parsial dapat digunakan metode poisson image reconstruction. Kemudian penghitungan jumlah kendaraan dengan virtual detector pada sistem yang dibangun masih memiliki kelemahan seperti titik tengah objek kendaraan yang sering tidak terhitung karena melompati virtual detector ataupun titik tengah bergerak mundur sehingga terhitung 2 objek kendaraan. Hal ini dapat diatasi dengan menandai jejak pergerakan tiap titik tengah sehingga membentuk sebuah jejak. Sebuah objek kendaraan dihitung ketika jejak pergerakan titik tengahnya bertimpangan dengan virtual detector. Hal ini memastikan titik tengah yang meloncat dari virtual detector tetap terhitung serta titik tengah yang bergerak mundur tidak terhitung ulang lagi.
Daftar Pustaka:
[1] M. Lei, D. Lefloch, P. Gouton and K. Madani,“A Video-based Real-time Vehicle Counting System Using Adaptive Background Method,” IEEE International Conference on Signal Image Technology and Internet Based Systems, pp. 523-528, 2008.
[2] Z. Zivkovic, “Improved Adaptive Gaussian mixture model for background subtraction”. Int Conf Pattern Recognition (ICPR), 2004.
[3] C. Stauffer and W. Grimson, “Adaptive background mixture models for real time tracking,” inProc. CVPR, 1998.
[4] R. Lienhart, and J. Maydt, “An extended set of Haar-Like Features for rapid object detection”. IEEE ICIP 2002, Vol. 1, pp. 900-903, Sep. 2002.
[5] Z. Zivkovic, F. van der Heijden, 2004. “Recursive unsupervised learning of finite mixture models”. IEEE Trans. Pattern Anal. Mach. Intell, 2004.