Pencacah benda berdasarkan warna dan ukuran
Bebas
87
0
0
Teks penuh
(2) PLAGIAT MERUPAKAN TINDAKAN TIDAK TERPUJI. FINAL PROJECT. THE COUNTER OF OBJECTS BASED ON COLOR AND SIZE In a partial fulfillment of the requirements For the degree of Sarjana Teknik Department of Electrical Engineering Faculty of Science and Technology, Sanata Dharma University. Arranged by : LAURENSIUS HILA GUSLIANTO NIM : 155114008. DEPARTMENT OF ELECTRICAL ENGINEERING FACULTY OF SCIENCE AND TECHNOLOGY SANATA DHARMA UNIVERSITY YOGYAKARTA 2020 ii.
(3) PLAGIAT MERUPAKAN TINDAKAN TIDAK TERPUJI. HALAMAN PERSEMBAHAN DAN MOTTO HIDUP. “PENAMPILAN FISIK HANYA SEKILAS DARI APA YANG SEBENARNYA TIDAK TERLIHAT”. Skripsi ini saya persembahkan untuk TUHAN YANG MAHA ESA Keluarga Tercinta Bangsa INDONESIA Dan sahabat-sahabat saya. vi.
(4) PLAGIAT MERUPAKAN TINDAKAN TIDAK TERPUJI. INTISARI Perkembangan teknologi yang sangat pesat di era globalisasi saat ini telah memberikan manfaat bagi manusia dan membantu manusia melakukan sesuatu dengan mudah. Penggunaan image processing dapat membantu manusia untuk mengetahui jenis suatu benda dari segi posisi, bentuk, ukuran dan warna secara jelas. Sistem pencacah benda berdasarkan warna dan ukuran dibuat untuk mengetahui warna merah, hijau, biru dan menentukan ukuran benda seperti besar, sedang dan kecil. Sistem pencacah benda berdasarkan warna dan ukuran menggunakan kotak hitam sebagai tempat untuk meletakkan webcam didalamnya dengan peletakkan yang telah ditentukan dan meletakkan masukan objek dengan posisi sembarang atau acak. Kemudian proses pengambilan warna dan ukuran objek menggunakan webcam C270 sebagai sensor pengidentifikasi benda yang akan di proses pada Matlab. Matlab akan memproses objek kubus yang berukuran besar, sedang, kecil dan berwarna merah, hijau, biru. Setelah matlab memproses objek, akan dilanjutkan oleh Arduino uno sebagai pengiriman data yang akan menuju ke LCD berukuran 16x4. Melalui tahapan-tahapan pengujian dan percobaan alat, didapatkan kesimpulan suatu alat sistem pencacah benda berdasarkan warna dan ukuran dapat mencacahkan benda berdasarkan warna dan ukuran dengan baik. Tidak adanya pengaruh terhadap rotasi pada area. Kata kunci: Image processing, Webcam c270, Arduino uno, LCD.. viii.
(5) PLAGIAT MERUPAKAN TINDAKAN TIDAK TERPUJI. ABSTRACT The very rapid development of technology in the current era of globalization has provide benefit for humans and helped people do things easily. The use of image processing can help humans to know the type of an object in terms of position, shape, size, and color cleary. The system of counting objects based on color and size is made to find out the colors red, green, blue and determine sizes such as large, medium and small. The counter system is based on color and size using a black box as a place to put the webcam in it with a predetermined placement and put the object input in an arbitrary or random position. Then the process of taking color and zise of the object using the C270 webcam as an object identification sensor to be processed in matlab. Matlab will process large, medium, small and red, green, blue cube objects. After the matlab processes the object, it will be continued by Arduino uno as a data transmission that will go to a 16x4 LCD. Through the stages of testing and experiment tools, it can be concluded that an object counting system tool based on color and size can count objects based on color and size well. There is no effect on rotation in the area.. Keywords: Image processing, Webcam c270, Arduino uno, LCD.. ix.
(6) PLAGIAT MERUPAKAN TINDAKAN TIDAK TERPUJI. DAFTAR ISI HALAMAN JUDUL (BAHASA INDONESIA) ................................................................... i HALAMAN JUDUL (BAHASA INGGRIS) ........................................................................ ii LEMBAR PERSETUJUAN ................................................................................................. iii LEMBAR PENGESAHAN .................................................................................................. iv PERNYATAAN KEASLIAN KARYA ................................................................................ v HALAMAN PERSEMBAHAN DAN MOTTO HIDUP ..................................................... vi LEMBARAN PERNYATAAN PERSETUJUAN PUBLIKASI KARYA ILMIAH UNTUK KEPENTINGAN AKADEMIS ........................................................................................... vii INTISARI ........................................................................................................................... viii ABSTRACT ......................................................................................................................... ix KATA PENGANTAR ........................................................................................................... x DAFTAR ISI ....................................................................................................................... xii DAFTAR GAMBAR ........................................................................................................... xv DAFTAR TABEL ............................................................................................................ xviii BAB I PENDAHULUAN .................................................................................................... 1 1.1.. Latar Belakang ........................................................................................................ 1. 1.2.. Tujuan dan Manfaat ................................................................................................ 2. 1.3.. Batasan Masalah ..................................................................................................... 2. 1.4.. Metodologi Penelitian ............................................................................................. 2. BAB II DASAR TEORI ........................................................................................................ 4 2.1.. Computer Vision ..................................................................................................... 4. 2.2.. Webcam Logitech C270 ......................................................................................... 4. 2.3.. Pengolahan Citra Digital ......................................................................................... 5. 2.3.1. Definisi Citra Digital ....................................................................................... 5. 2.3.2.. Citra RGB ........................................................................................................ 6 xii.
(7) PLAGIAT MERUPAKAN TINDAKAN TIDAK TERPUJI. 2.3.3.. Citra Grayscale ................................................................................................ 7. 2.3.4. Citra Biner ............................................................................................................ 8 2.3.5.. Konversi Citra RGB ke Grayscale .................................................................. 9. 2.3.6. Konversi Citra Grayscale ke Biner .................................................................... 10 2.3.7. Median Filtering [12] ......................................................................................... 11 2.3.8.. Labeling Benda .............................................................................................. 12. 2.3.9.. Segmentasi Warna ......................................................................................... 13. 2.4.. Pengenalan Warna Dan Ukuran ............................................................................ 13. 2.4.1. Pengenalan Warna .............................................................................................. 14 2.4.2. Area .................................................................................................................... 14 2.4.3. Arduino Uno ....................................................................................................... 15 2.4.4. LCD (Liquid Crystal Display)16x4 [17] ............................................................ 16 BAB III PERANCANGAN PENELITIAN ........................................................................ 19 3.1.. Proses Pencacah Benda Berdasarkan Warna Dan Ukuran ................................... 19. 3.2. Sistem Pencacah Benda Berdasarkan Warna Dan Ukuran ................................. 21 3.2.1. Pengambilan Citra benda ................................................................................ 21 3.2.2. Image preprocessing ........................................................................................ 21 3.2.3. Segmentasi Objek ............................................................................................... 22 3.2.4. Segmentasi Objek Berdasarkan Warna .............................................................. 23 3.2.5. Deteksi Warna .................................................................................................... 25 3.2.6. Hitung Luasan .................................................................................................... 26 3.2.7. Penggabungan Hasil Deteksi Warna Dan Hitung Luasan .................................. 27 3.2.8. Komunikasi Arduino .......................................................................................... 29 3.3. Perancangan Tampilan GUI Matlab ......................................................................... 30 BAB IV HASIL DAN PEMBAHASAN ............................................................................. 33 4.1. Hasil Pengujian Dan Analisis ................................................................................ 33 4.1.1. Pengujian Tanpa Rotasi ...................................................................................... 33 xiii.
(8) PLAGIAT MERUPAKAN TINDAKAN TIDAK TERPUJI. 4.1.2.. Pengujian. Keberhasilan. Pencacah. Benda. Berdasarkan. Warna. Dan. Ukuran .......................................................................................................................... 33 4.1.3. Pengujian Pengaruh Rotasi................................................................................. 40 4.2. Program Utama ....................................................................................................... 43 4.2.1. Program Matlab .................................................................................................. 43 4.2.2. Program Arduino Uno ........................................................................................ 46 4.3. Beberapa Catatan .................................................................................................... 50 4.4. Perbandingan Dengan Penelitian Sebelumnya ..................................................... 50 BAB V KESIMPULAN DAN SARAN .............................................................................. 51 5.1.. Kesimpulan ........................................................................................................... 51. 5.2.. Saran ..................................................................................................................... 51. DAFTAR PUSTAKA .......................................................................................................... 52 LAMPIRAN ........................................................................................................................ 54. xiv.
(9) PLAGIAT MERUPAKAN TINDAKAN TIDAK TERPUJI. DAFTAR GAMBAR Gambar 2.1. Logitech C270 .................................................................................................. 5 Gambar 2.2. Koordinat citra digital [6] ................................................................................. 6 Gambar 2.3. Sistem koordinat citra berukuran N x M (N baris dan M kolom) [6] ............... 6 Gambar 2.4. Warna RGB ...................................................................................................... 7 Gambar 2.5. Warna RGB dalam Bentuk Kubus .................................................................... 7 Gambar 2.6. Grayscale Level [8]........................................................................................... 8 Gambar 2.7. Citra grayscale beserta representasi nilai keabuannya ...................................... 8 Gambar 2.8. Contoh (a) citra grayscale dan (b) citra Biner [9] ............................................. 9 Gambar 2.9. Konversi Warna RGB ke grayscale [10] ........................................................ 10 Gambar 2.10. Ilustrasi perubahan nilai pixel pada proses thresholding .............................. 11 Gambar 2.11. Median filtering ............................................................................................ 12 Gambar 2.12. Proses labeling (a) citra input (b) citra hasil labeling Benda ........................ 12 Gambar 2.13. Segmentasi warna ......................................................................................... 13 Gambar 2.14. Contoh Pebandingan RGB setelah dijumlahkan........................................... 14 Gambar 2.15. Area objek persegi ........................................................................................ 15 Gambar 2.16. Arduino Uno ................................................................................................. 16 Gambar 2.17. Struktur dasar LCD [17] .............................................................................. 17 Gambar 2.18. Contoh LCD 16x4 Tampak Depan ............................................................... 18 Gambar 2.19. Contoh LCD 16x4 Tampak Belakang .......................................................... 18 Gambar 3.1. Diagram Proses Pengenalan Benda ................................................................ 19 Gambar 3.2. Flowchart keseluruhan sistem pencacah benda .............................................. 20 Gambar 3.3. Flowchart pengambilan citra benda ................................................................ 21 Gambar 3.4. Flowchart preprocessing ................................................................................. 22 Gambar 3.5. Flowchart Segmentasi objek ........................................................................... 23 Gambar 3.6. Flowchart segmentasi objek berdasarkan warna ............................................ 24 Gambar 3.7. Flowchart deteksi warna ................................................................................. 25 Gambar 3.8. Flowchart Hitung luasan ................................................................................. 26 Gambar 3.9. Flowchart proses penggabungan hasil deteksi warna dan hitung luasan ........ 27 Gambar 3.10. Flowchart proses Arduino Uno ..................................................................... 29 Gambar 3.11. Rangkaian Arduino ke LCD ......................................................................... 30 xv.
(10) PLAGIAT MERUPAKAN TINDAKAN TIDAK TERPUJI. Gambar 3.12. Diagram alir proses kerja GUI ...................................................................... 31 Gambar 3.13. Tampilan GUI ............................................................................................... 31 Gambar 3.14. Tampilan LCD 16x4 ..................................................................................... 32 Gambar 4.1. Posisi peletakan benda .................................................................................... 32 Gambar 4.2. Percobaan dengan 1 benda pada tampilan GUI .............................................. 33 Gambar 4.3. Percobaan dengan 1 benda pada tampilan LCD 16x4 .................................... 33 Gambar 4.4. Percobaan dengan 1 benda pada tampilan GUI .............................................. 34 Gambar 4.5. Percobaan dengan 1 benda pada tampilan LCD 16x4 .................................... 34 Gambar 4.6. Percobaan dengan 2 benda pada tampilan GUI .............................................. 35 Gambar 4.7. Percobaan dengan 2 benda pada tampilan LCD 16x4 .................................... 35 Gambar 4.8. Percobaan dengan 2 benda pada tampilan GUI .............................................. 35 Gambar 4.9. Percobaan dengan 2 benda pada tampilan LCD 16x4 .................................... 36 Gambar 4.10. Percobaan dengan 3 benda pada tampilan GUI ............................................ 36 Gambar 4.11. Percobaan dengan 3 benda pada tampilan LCD 16x4 .................................. 37 Gambar 4.12. Percobaan dengan 3 benda pada tampilan GUI ............................................ 37 Gambar 4.13. Percobaan dengan 3 benda pada tampilan LCD 16x4 .................................. 37 Gambar 4.14. Percobaan dengan 4 benda pada tampilan GUI ............................................ 38 Gambar 4.15. Percobaan dengan 4 benda pada tampilan LCD 16x4 .................................. 38 Gambar 4.16. Percobaan dengan 4 benda pada tampilan GUI ............................................ 39 Gambar 4.17. Percobaan dengan 4 benda pada tampilan LCD 16x4 .................................. 39 Gambar 4.18. Percobaan benda tertumpuk .......................................................................... 41 Gambar 4.19. Percobaan benda terpotong ........................................................................... 41 Gambar 4.20. Masukan benda untuk data terpotong ........................................................... 42 Gambar 4.21. Program pengambilan citra benda ................................................................ 42 Gambar 4.22. Program image preprocessing....................................................................... 43 Gambar 4.23. Program segmentasi objek ............................................................................ 43 Gambar 4.24. Program segmentasi objek berdasarkan warna ............................................. 44 Gambar 4.25. Program deteksi warna ................................................................................. 44 Gambar 4.26. Program penggabungan hasil deteksi warna dan hitung luasan ................... 45 Gambar 4.27. Program pemanggilan library ....................................................................... 45 Gambar 4.28. Program inisialisasi baudrate dan type LCD ................................................ 46 Gambar 4.29. Program judul baris dan kolom..................................................................... 46 Gambar 4.30. Program pemecahan karakter ....................................................................... 47 xvi.
(11) PLAGIAT MERUPAKAN TINDAKAN TIDAK TERPUJI. Gambar 4.31. Program penempatan data dalam LCD ......................................................... 48. xvii.
(12) PLAGIAT MERUPAKAN TINDAKAN TIDAK TERPUJI. DAFTAR TABEL Tabel 2.1. Spesifikasi Logitech C270 [4] .............................................................................. 4 Tabel 2.2. Spesifikasi Board Arduino Uno.......................................................................... 16 Tabel 2.3. Spesifikasi LCD 16x4......................................................................................... 17 Tabel 3.1. Keterangan GUI.................................................................................................. 31 Tabel 3.2. Keterangan LCD 16x4 ........................................................................................ 31 Tabel 4.1. Percobaan Dengan 1 Benda ................................................................................ 33 Tabel 4.2. Percobaan Dengan 2 Benda ................................................................................ 34 Tabel 4.3. Percobaan Dengan 3 Benda ................................................................................ 36 Tabel 4.4. Percobaan Dengan 4 Benda ................................................................................ 38 Tabel 4.5. Nilai Area ........................................................................................................... 40 Tabel 4.6. Nama variable Arduino Uno .............................................................................. 46 Tabel 4.7. Penempatan judul dalam kolom dan baris Arduino Uno.................................... 47 Tabel 4.8. Penempatan data dalam kolom dan baris Arduino Uno ..................................... 48 Tabel 4.9. Hasil Perbandingan Penelitian [1] ...................................................................... 49. xviii.
(13) PLAGIAT MERUPAKAN TINDAKAN TIDAK TERPUJI. BAB I PENDAHULUAN 1.1.. Latar Belakang Perkembangan teknologi yang sangat pesat di era globalisasi saat ini telah. memberikan manfaat bagi manusia dan membantu manusia melakukan sesuatu dengan mudah. Salah satu topik yang saat ini dikembangkan seperti aplikasi image processing. Penggunaan image processing dapat membantu manusia untuk mengetahui jenis suatu benda dari segi posisi, bentuk dan warna secara jelas. Di era teknologi ini masih terdapat pekerjaan manusia yang dilakukan manual dalam pengelompokan benda. Untuk itu diperlukan suatu alat untuk mengidentifikasi suatu ukuran benda dan warna benda. Sebelumnya pernah ada penelitian tentang sistem pengenalan benda berdasarkan warna untuk lengan robot sebagai pemindah yang dilakukan oleh Richard Bagus Dean Mahendra, peletakan benda hanya pada satu posisi yang telah ditentukan dengan warna benda berupa merah, hijau, biru serta benda yang dideteksi hanya satu bentuk yaitu kubus 3D dan peletakan objek hanya pada satu posisi [1]. Dari penelitian tersebut maka penulis memiliki gagasan untuk membuat suatu sistem yang dapat mencacah benda berdasarkan warna dan ukuran. Warna yang terdiri dari merah, hijau, biru dan ukuran yang terdiri dari besar, sedang, kecil dengan peletakan secara acak yang keluarannya akan ditampilkan di LCD berukuran 16x4 yang akan dibantu Arduino uno sebagai pengirim data. Prinsip kerja sistem ini yaitu input berupa kubus berwarna merah, hijau, biru dengan berukuran besar, sedang, kecil yang diletakkan dalam sebuah kotak hitam dengan posisi sembarang atau acak. Kemudian proses pengambilan warna dan ukuran objek menggunakan webcam C270 sebagai sensor pengidentifikasi benda yang akan di proses pada Matlab. Matlab akan memproses objek kubus yang berukuran besar, sedang, kecil dan berwarna merah, hijau, biru. Setelah matlab memproses objek, akan dilanjutkan oleh Arduino uno sebagai pengiriman data yang akan menuju ke LCD berukuran 16x4. LCD akan menampilkan seluruh keluaran hasil yang telah diidentifikasi oleh webcam C270 dan telah di proses oleh Matlab, keluaran diLcd akan menjadi titik akhir pada proses ini.. 1.
(14) PLAGIAT MERUPAKAN TINDAKAN TIDAK TERPUJI 2. 1.2.. Tujuan dan Manfaat. Tujuan dari penelitian ini adalah : 1. Membuat salah satu contoh dari aplikasi computer vision yang dapat mencacah benda berdasarkan warna dan ukuran menggunakan webcam yang ditampilkan di LCD. Manfaat dari penelitian ini adalah : 1. Mempermudah pekerjaan manusia dalam mengetahui warna dan ukuran dalam aplikasi image processing. 2. Untuk media pembelajaraan mengenai computer vision warna dan ukuran.. 1.3.. Batasan Masalah Adapun beberapa batasan masalah dari penelitian ini untuk menghindari adanya. penyimpangan pokok masalah agar penelitian tersebut lebih terarah sehingga tujuan penelitian akan tercapai. Beberapa batasan masalah dalam penelitian ini adalah sebagai berikut : 1. Pengenalan terhadap objek berukuran Besar, Sedang, Kecil. 2. Menggunakan webcam C270 untuk mengidentifikasi benda yang terhubung ke software MATLAB. 3. Kotak hitam sebagai tempat peletakan objek dengan ukuran tinggi 30cm dan lebar 30cm. 4. Ukuran objek kubus yang digunakan Besar 6cm, Sedang 4cm, Kecil 2cm. 5. Warna objek RGB (Merah, Hijau, Biru) 6. Untuk peletakan objek acak. 7. Pengiriman data dari Matlab ke LCD menggunakan komunikasi Arduino uno. 8. Output ditampilkan di monitor dan LCD yang berukuran 16x4.. 1.4.. Metodologi Penelitian Berdasarkan tujuan yang ingin dicapai maka metode-metode yang digunakan yaitu :. 1. Studi literature, mengumpulkan bahan-bahan yang terkait mengenai webcam untuk image processing pada MATLAB, jurnal ilmiah yang membahas computer vision, website mengenai pengenalan suatu warna dan ukuran benda serta buku-buku penunjang lainnya..
(15) PLAGIAT MERUPAKAN TINDAKAN TIDAK TERPUJI 3. 2. Perancang perngakat keras dan perangkat lunak. Tahap ini bertujuan untuk mencari bentuk model yang optimal dari sistem yang akan dibuat dengan mempertimbangkan dari berbagai faktor permasalahan. 3. Pembuatan perangkat keras dan perangkat lunak. Tahap ini tentang pembuatan perangkat keras seperti pembuatan kotak hitam untuk peletakan benda dan posisi tiang penyangga webcam dengan ukuran yang ditentukan. Perangkat keras lainnya seperti Arduino uno, LCD dan webcam C270. Perangkat lunak yaitu pembuatan GUI menggunakan aplikasi MATLAB untuk pengolahan Citra warna merah, hijau, biru, webcam C270 sebagai sensor untuk mengidentifikasi warna benda dan ukuran. 4. Uji coba dan pengambilan data untuk menguji prototype yang sudah dibuat sehingga dapat dilihat hasil kerjanya. Tahap ini tentang pengambilan data yang dilakukan dengan mencari data dari masing-masing warna benda seperti warna merah, hijau, biru dan ukuran benda yang berukuran besar, sedang, kecil. 5. Analisis dan penyimpulan hasil percobaan. Analisis dan penyimpulan hasil percobaan dapat dilakukan dengan melihat presentase error yang terjadi pada kinerja sistem saat mendeteksi benda dan tingkat keberhasilan saat mengidentifikasi warna dan ukuran benda..
(16) PLAGIAT MERUPAKAN TINDAKAN TIDAK TERPUJI. BAB II DASAR TEORI 2.1.. Computer Vision Computer vision proses otomatis yang mengintegrasikan sejumlah besar proses. untuk persepsi visual, seperti akuisisi citra, pengolahan citra, pengenalan dan membuat keputusan. Computer vision mencoba meniru bagaimana cara kerja sistem visual manusia (human vision) yang sebenarnya sangat kompleks. Objek dilihat oleh manusia dengan indra penglihatan/ mata. Kemudian citra objek dilanjutkan ke otak untuk diinterpretasi sehingga manusia dapat mengerti objek apa yang terlihat dalam pandangan penglihatannya [2]. Bidang yang berkaitan erat dengan computer vision adalah image processing (pengolahan citra) dan machine vision (visi mesin). Ada tumpang tindih yang signifikan dalam berbagai teknik dan aplikasi yang mencakup dua bidang tersebut. Hal ini menunjukkan teknik dasar yang digunakan dan dikembangkan kurang lebih sama. Computer vision mencakup teknologi utama untuk menganalisis citra secara otomatis yang digunakan dalam bidang lain. Sedangkan machine vision biasanya mengacu pada proses penggabungan analisis citra otomatis dengan metode dan teknologi lain baik berupa software maupun hardware untuk mencapai tujuan tertentu.. 2.2.. Webcam Logitech C270 WebCam adalah sebuah periferal berupa kamera sebagai pengambil citra/gambar. dan mikropon (optional) sebagai pengambil suara/audio yang dikendalikan oleh sebuah komputer atau oleh jaringan komputer. Gambar yang diambil oleh WebCam ditampilkan ke layar monitor, karena dikendalikan oleh komputer maka ada interface atau port yang digunakan untuk menghubungkan WebCam dengan komputer atau jaringan [3]. Spesifikasi Webcam Logitech dapat dilihat pada Tabel 2.1 dan gambar Webcam C270 dapat dilihat pada gambar 2.1. Tabel 2.1. Spesifikasi Logitech C270 [4] High-Definition (HD) video calling Video capture Photo quality Computer interface Focus Microphone Hardware Support. HD 720 pixels Up to 1280 x 720 pixels Up to 3.0 Megapixels USB 2.0 (recommended) pixel focus Yes Laptop, Monitor LCD or CRT. 4.
(17) PLAGIAT MERUPAKAN TINDAKAN TIDAK TERPUJI 5. Gambar 2.1. Logitech C270. 2.3.. Pengolahan Citra Digital Pengolahan Citra merupakan proses pengolahan dan analisis citra yang banyak. melibatkan persepsi visual. Proses ini mempunyai ciri data masukan dan informasi keluaran yang berbentuk citra. Istilah pengolahan citra digital secara umum didefinisikan sebagai pemrosesan citra dua dimensi dengan komputer. Dalam definisi yang lebih luas, pengolahan citra digital juga mencakup semua data dua dimensi. Citra digital adalah barisan bilangan nyata maupun kompleks yang diwakili oleh bit-bit tertentu.. 2.3.1 Definisi Citra Digital Pengolahan citra (image Processing) merupakan proses mengolah piksel-piksel di dalam citra digital untuk tujuan tertentu. Pada awalnya pengolahan citra ini dilakukan untuk memperbaiki kualitas citra, namun dengan berkembangnya dunia komputasi yang ditandai dengan semakin meningkatnya kapasitas dan kecepatan proses komputer serta munculnya ilmu-ilmu komputasi yang memungkinkan manusia dapat mengambil informasi dari suatu citra.. Citra yang diolah merupakan citra digital yang merupakan sekumpulan bilangan yang direpresentasikan oleh bit berhingga. Proses pengolahan citra banyak melibatkan persepsi visual, dan mempunyai ciri data masukan dan informasi keluaran yang berbentuk citra [6]. Citra digital adalah citra f(x,y) dimana dilakukan diskritisasi koordinat sampling/ spasial dan diskritisasi tingkat kwantisasi (kabuan/ kecemerlangannya). Citra digital merupakan fungsi intensitas cahaya f(x,y), dimana harga x dan harga y adalah koordinat spasial. Harga fungsi tersebut di setiap titik (x,y) merupakan tingkat kecemerlangan citra pada titik tersebut. Citra digital merupakan suatu matriks dimana indeks baris dan kolomnya menyatakan suatu titik pada citra tersebut dan elemen matriksnya untuk menyatakan tingkat.
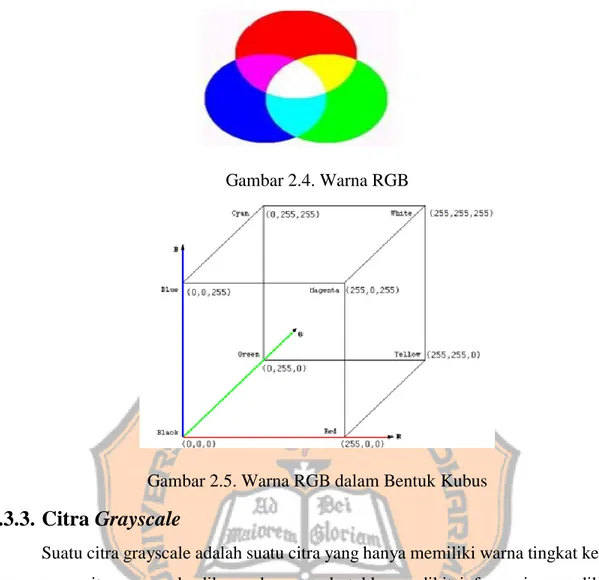
(18) PLAGIAT MERUPAKAN TINDAKAN TIDAK TERPUJI 6. keabuan pada titik. Koordinat citra digital dapat dilihat pada gambar 2.2 dan Sistem koordinat citra berukuran N x M (N baris dan M kolom) dapat dilihat pada gambar 2.3.. Gambar 2.2. Koordinat citra digital [6] Keterangan : 1. N = jumlah baris 0 = y = N – 1. 2. M = jumlah kolom 0 = x = M – 1. 3. L = maksimal warna intensitas 0 = f(x,y) = L – 1.. Gambar 2.3. Sistem koordinat citra berukuran N x M (N baris dan M kolom) [6]. 2.3.2. Citra RGB Citra RGB (Red, Green, Blue) merupakan citra yang nilai intensitas pikselnya tersusun oleh tiga kanal warna yaitu merah, hijau, dan biru. Red (Merah), Green (Hijau) dan Blue (Biru) merupakan warna dasar yang dapat diterima oleh mata manusia. Setiap piksel pada citra warna mewakili warna yang merupakan kombinasi dari ketiga warna dasar RGB. Setiap titik pada citra warna membutuhkan data sebesar 3 byte. Setiap warna dasar memiliki intensitas tersendiri dengan nilai minimum nol (0) dan nilai maksimum 255 (8 bit). RGB didasarkan pada teori bahwa mata manusia peka terhadap panjang gelombang 630nm (merah), 530 nm (hijau), dan 450 nm (biru) [7]. Warna merah, hijau, dan biru dapat dilihat pada gambar 2.4. Warna RGB dalam Bentuk Kubus dapat dilihat pada gambar 2.5..
(19) PLAGIAT MERUPAKAN TINDAKAN TIDAK TERPUJI 7. Gambar 2.4. Warna RGB. Gambar 2.5. Warna RGB dalam Bentuk Kubus. 2.3.3. Citra Grayscale Suatu citra grayscale adalah suatu citra yang hanya memiliki warna tingkat keabuan. Penggunaan citra grayscale dikarenakan membutuhkan sedikit informasi yang diberikan pada tiap piksel dibandingkan dengan citra berwarna. Dalam komputasi, suatu citra digital grayscale atau greyscale adalah suatu citra dimana nilai dari setiap pixel merupakan sample tunggal. Citra yang ditampilkan dari citra jenis ini terdiri atas warna abu-abu, bervariasi pada warna hitam pada bagian yang intensitas terlemah dan warna putih pada intensitas terkuat [8]. Citra grayscale berbeda dengan citra ”hitam-putih”, dimana pada konteks komputer, citra hitam putih hanya terdiri atas 2 warna saja yaitu ”hitam” dan ”putih” saja. Pada citra grayscale warna bervariasi antara hitam dan putih, tetapi variasi warna diantaranya sangat banyak. Citra grayscale seringkali merupakan perhitungan dari intensitas cahaya pada setiap pixel pada spektrum elektromagnetik single band. Citra grayscale disimpan dalam format 8 bit untuk setiap sample pixel, yang memungkinkan sebanyak 256 intensitas. Format ini sangat membantu dalam pemrograman karena manupulasi bit yang tidak terlalu banyak. Pada aplikasi lain seperti pada aplikasi medical imaging dan remote sensing biasa juga.
(20) PLAGIAT MERUPAKAN TINDAKAN TIDAK TERPUJI 8. digunakan format 10,12 maupun 16 bit. Grayscale Level dapat dilihat pada gambar 2.6 dan Citra grayscale beserta representasi nilai keabuannya dapat dilihat pada gambar 2.7.. Gambar 2.6. Grayscale Level [8]. Gambar 2.7. Citra grayscale beserta representasi nilai keabuannya. 2.3.4. Citra Biner Citra biner adalah citra dimana piksel-pikselnya hanya memiliki dua buah nilai derajat keabuan (grayscale) yaitu hitam dan putih. Pixel-pixel (picture elements) suatu objek akan bernilai 1 sedangkan pixel–pixel latar belakang bernilai 0. Pada waktu menampilkan gambar, 0 adalah putih dan 1 adalah hitam. Jadi, pada citra biner, latar belakang berwarna putih sedangkan objek berwarna hitam [9]. Citra biner hanya dapat dibentuk dari citra grayscale, dengan menggunakan operasi pengembangan (thresholding). Operasi pengambangan (thresholding) memisahkan tingkat keabuan menjadi dua kelas, hitam yang nilai tingkat keabuan lebih kecil dari nilai ambang, dan putih yang nilai tingkat keabuan lebih besar dari nilai ambang. Meskipun saat ini citra berwarna lebih disukai karena memberi kesan yang lebih kaya daripada citra biner, namun tidak membuat citra biner mati. Citra biner banyak digunakan dalam kehidupan sehari-hari seperti pada citra logo suatu instansi yang hanya memiliki warna hitam dan putih, citra hasil pemindaian suatu objek seperti yang dihasilkan scanner, citra kode batang atau bar code yang sering terdapat pada kemasan suatu produk, dan lain sebagainya. Gambar (a) pada 2.8 menunjukan gambar citra grayscale dan gambar (b) menunjukkan gambar citra biner..
(21) PLAGIAT MERUPAKAN TINDAKAN TIDAK TERPUJI 9. (a). (b). Gambar 2.8. Contoh (a) citra grayscale dan (b) citra Biner [9]. 2.3.5. Konversi Citra RGB ke Grayscale Proses awal yang banyak dilakukan dalam image processing adalah mengubah citra berwarna menjadi citra grayscale. Berdasarkan jenis warnanya, citra digital dapat dibedakan menjadi tiga jenis yaitu citra RGB, citra grayscale, dan citra biner. Citra RGB (Red, Green, Blue) merupakan citra yang nilai intensitas pikselnya tersusun oleh tiga kanal warna yaitu. merah, hijau, dan biru. Citra grayscale adalah citra yang nilai intensitas pikselnya berdasarkan derajat keabuan. Sedangkan citra biner adalah citra yang hanya memiliki dua nilai intensitas yaitu 0 (hitam) dan 1 (putih) [10]. Untuk memudahkan pengolahan citra, biasanya citra RGB akan dikonversi menjadi citra skala keabuan (grayscale). Karena pada citra RGB pengolahan citra akan dilakukan dengan menghitung pada 3 channel warna, sedangkan pada citra skala keabuan cukup 1 channel warna sehingga memudahkan proses komputasi. Format citra skala keabuan memakai warna hitam sebagai warna minimal (0) dan warna putih (255) sebagai warna maksimalnya, sehingga warna antaranya adalah abu-abu. Secara umum untuk mengubah citra RGB ke citra grayscale menggunakan persamaan (2.1) yang menghasilkan nilai derajat keabuan setiap pixel citra grayscale. Konversi Warna RGB ke grayscale dapat dilihat pada gambar 2.9. 𝐺𝑟𝑎𝑦 = 𝐼 = 0.2989 ∗ 𝑅 + 0.5870 ∗ 𝐺 + 0.1140 ∗ 𝐵 Keterangan: I = Tingkat Keabuan R = Red (Merah), G = Green (Hijau), B = Blue (Biru). (2.1).
(22) PLAGIAT MERUPAKAN TINDAKAN TIDAK TERPUJI 10. Gambar 2.9. Konversi Warna RGB ke grayscale [10]. 2.3.6. Konversi Citra Grayscale ke Biner Proses konversi citra grayscale ke citra biner memerlukan suatu nilai batas yang biasa di sebut nilai threshold. Nilai intensitas dari citra grayscale yang lebih dari atau sama dengan nilai threshold akan diubah menjadi 1 (warna putih) sedangkan untuk nilai intensitas citra grayscale yang kurang dari nilai threshold akan diubah menjadi 0 (warna hitam). Sehingga citra yang keluar dari hasil thresholding merupakan citra biner [11]. Ilustrasi perubahan nilai pixel pada proses thresholding dapat dilihat pada gambar 2.10. Persamaan yang digunakan untuk mengkonversi nilai piksel citra grayscale menjadi biner pada metode thresholding adalah:. 1, 𝑗𝑖𝑘𝑎 𝑓(𝑥, 𝑦) ≥ 𝑇 𝑔(𝑥, 𝑦) = { 0, 𝑗𝑖𝑘𝑎 𝑓(𝑥, 𝑦) < 𝑇 Keterangan: f (x,y) : citra grayscale g (x,y) : citra biner T. : nilai threshold. (2.2).
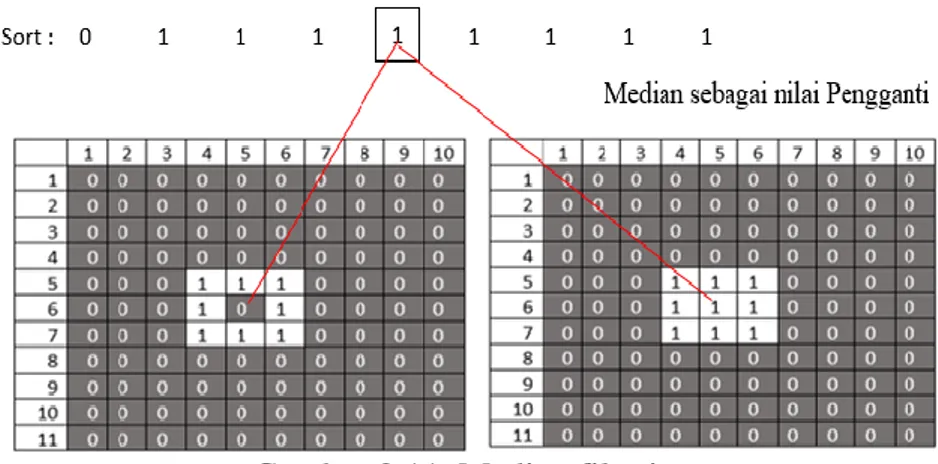
(23) PLAGIAT MERUPAKAN TINDAKAN TIDAK TERPUJI 11. Gambar 2.10. Ilustrasi perubahan nilai pixel pada proses thresholding. 2.3.7. Median Filtering [12] Median filtering bertujuan untuk mengurangi noise atau gangguan pada citra. Noise terjadi dikarenakan pencahayaan yang kurang baik dan gangguan fisik pada alat akuisisi. Noise pada citra digital dapat berupa titik-titik hitam di area citra yang berwarna putih ataupun titik-titik putih pada area yang berwarna hitam. Untuk mengurangi noise pada citra digital dapat dilakukan dengan median filtering. Median filtering merupakan salah satu filter non-linear. Dikatakan non-linear karena cara kerja metode ini tidak termasuk dalam katagori operasi konvolusi. Operasi non-linear dihitung dengan mengurutkan nilai intensitas sekelompok pixel, kemudian nilai pixel yang diproses akan digantikan dengan nilai tertentu. Pada median filter yang memuat pixel ganjil di geser titik per titik pada seluruh daerah citra. Nilai-nilai yang berbeda pada window diurutkan ascending yang nantinya akan di hitung nilai mediannya. Nilai tersebut akan menggantikan nilai yang berbeda pada pusat window. Nilai pixel pada pusat bidang window dapat dihitung dengan mencari nilai median dari nilai intensitas sekelompok pixel yang telah diurutkan jika window tersebut ditempatkan pada suatu bidang citra. Contoh Median filtering dapat dilihat pada gambar 2.11. Secara matematis dapat dirumuskan sebagai berikut: 𝑔(𝑥, 𝑦) = 𝑀𝑒𝑑𝑖𝑎𝑛{𝑓 (𝑥 − 𝑖, 𝑦 − 𝑗), (𝑖, 𝑗) ∈ 𝑊 } Keterangan : g(x,y) : Citra yang dihasilkan dari citra f(x,y) : W sebagai window yang ditempatkan pada bidang citra (𝑖,j). : Elemen dari window.. Contoh median filtering dapat dilihat pada gambar 2.11.. (2.3).
(24) PLAGIAT MERUPAKAN TINDAKAN TIDAK TERPUJI 12. Gambar 2.11. Median filtering. 2.3.8. Labeling Benda Labeling adalah suatu proses pemberian label yang sama pada sekumpulan pixel pembentuk benda yang saling berdekatan pada suatu citra. Citra biner dapat merepresentasikan sejumlah benda. Jumlah benda dalam citra biner dihitung dengan cara memberi label pada benda. Pelabelan terhadap benda merupakan suatu tindakan untuk memberi label berbeda (memberi nomor) pada setiap benda yang terdapat dalam citra biner. Pada proses pelabelan, pixel berlabel nol adalah latar belakang, pixel berlabel satu merupakan label pada benda pertama, pixel berlabel dua merupakan label pada benda ke dua, dan seterusnya. Pelabelan pada citra biner digunakan untuk menghitung jumlah benda dalam suatu citra. Contoh proses pelebelan citra dapat dilihat pada gambar 2.12 [13].. Gambar 2.12. Proses labeling (a) citra input (b) citra hasil labeling Benda.
(25) PLAGIAT MERUPAKAN TINDAKAN TIDAK TERPUJI 13. 2.3.9. Segmentasi Warna Segmentasi warna merupakan salah satu metode segmentasi citra yang memisahkan antara objek dengan background berdasarkan ciri warna tertentu dari objek tersebut. Pemisahan tersebut didasarkan pada perbedaan karakteristik masing-masing region yang mencolok. Pada proses Segmentasi warna, dilakukan segmentasi citra berdasarkan pada perbedaan warna antara foreground dengan background. Dalam citra digital, warna yang merupakan spektrum cahaya tampak (merah, jingga, kuning, hijau, biru, ungu) direpresentasikan oleh nilai Hue [14]. Contoh segmentasi warna dapat dilihat pada gambar 2.1.. (a). (b). (c). (d). Gambar 2.13. Segmentasi warna. 2.4.. Pengenalan Warna Dan Ukuran Warna dan ukuran merupakan salah satu ciri yang dapat diekstrak dari suatu benda. untuk membedakan warna dan ukuran objek tersebut dengan objek lainnya. Untuk dapat membedakan benda satu dengan benda lainnya tersebut dilakukan identifikasi pada benda. Identifikasi tersebut dapat berupa pengenalan warna dan ukuran..
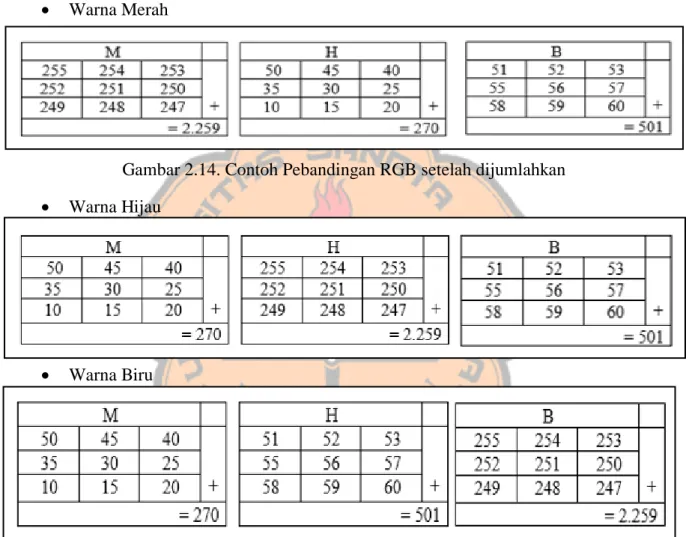
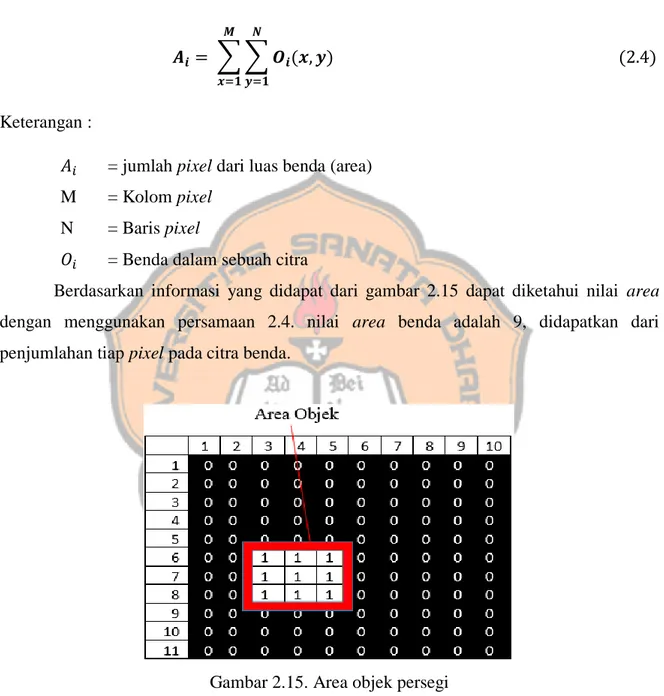
(26) PLAGIAT MERUPAKAN TINDAKAN TIDAK TERPUJI 14. 2.4.1. Pengenalan Warna Metode yang digunakan untuk penentuan warna yaitu melihat matriks warna merah, hijau, biru. Warna dasar masing-masing menyatakan nilai jumlah dari komponen warna merah, hijau, biru, untuk itu maka dilakukan perbandingan. Jumlah nilai terbesar menunjukan warna pada benda. Pada gambar adalah contoh nilai yang didapat setelah di jumlahkan. Perbandingan RGB dapat dilihat pada gambar 2.14 [1] . . Warna Merah. Gambar 2.14. Contoh Pebandingan RGB setelah dijumlahkan . Warna Hijau. . Warna Biru. Gambar 2.14. (Lanjutan) Contoh Pebandingan RGB setelah dijumlahkan. Dapat dilihat pada gambar 2.14 yang berwarna merah menunjukkan nilai RGB lebih besar dari warna hijau dan biru, sehingga dapat disimpulkan bahwa gambar pada benda berwarna merah.. 2.4.2. Area Area merupakan banyaknya pixel pada suatu benda (luas benda). Benda pada citra biner direpresentasikan degan warna putih. Nilai pixel citra berwarna putih pada area.
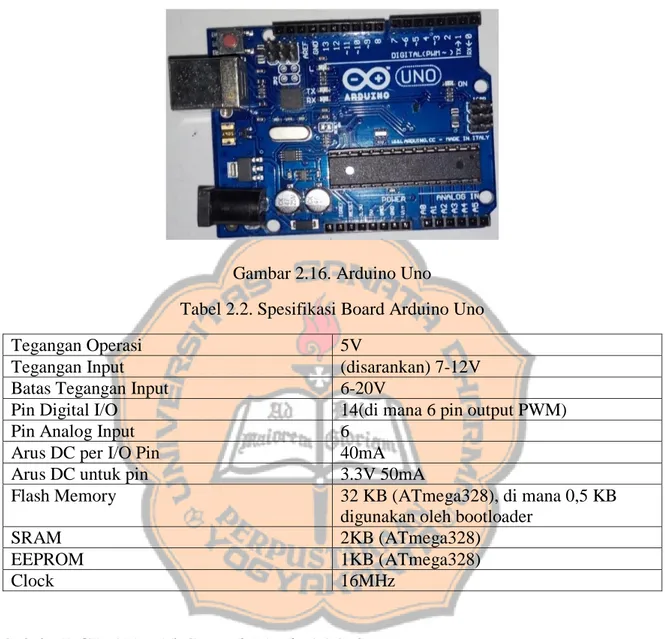
(27) PLAGIAT MERUPAKAN TINDAKAN TIDAK TERPUJI 15. tersebut bernilai 1. Jumlah pixel (yang bernilai 1) pada suatu benda dalam citra digital adalah nilai areanya [15]. Untuk mengenali ukuran dari suatu benda bisa menggunakan rumus area sebagai berikut :. 𝑴. 𝑵. 𝑨𝒊 = ∑ ∑ 𝑶𝒊 (𝒙, 𝒚). (2.4). 𝒙=𝟏 𝒚=𝟏. Keterangan : 𝐴𝑖. = jumlah pixel dari luas benda (area). M. = Kolom pixel. N. = Baris pixel. 𝑂𝑖. = Benda dalam sebuah citra. Berdasarkan informasi yang didapat dari gambar 2.15 dapat diketahui nilai area dengan menggunakan persamaan 2.4. nilai area benda adalah 9, didapatkan dari penjumlahan tiap pixel pada citra benda.. Gambar 2.15. Area objek persegi. 2.4.3. Arduino Uno Arduino Uno adalah board mikrokontroler berbasis ATmega328 (datasheet). Memiliki 14 pin input dari output digital dimana 6 pin input tersebut dapat digunakan sebagai output PWM dan 6 pin input analog, 16 MHz osilator kristal, koneksi USB, jack power, ICSP header, dan tombol reset. Untuk mendukung mikrokontroler agar dapat digunakan, cukup hanya menghubungkan Board Arduino Uno ke komputer dengan.
(28) PLAGIAT MERUPAKAN TINDAKAN TIDAK TERPUJI 16. menggunakan kabel USB atau listrik dengan AC yang-ke adaptor-DC atau baterai untuk menjalankannya [16]. Gambar Arduino Uno dapat dilihat pada gambar 2.17 dan tabel spesifikasinya dapat dilihat pada pada tabel 2.3.. Gambar 2.16. Arduino Uno Tabel 2.2. Spesifikasi Board Arduino Uno Tegangan Operasi Tegangan Input Batas Tegangan Input Pin Digital I/O Pin Analog Input Arus DC per I/O Pin Arus DC untuk pin Flash Memory SRAM EEPROM Clock. 5V (disarankan) 7-12V 6-20V 14(di mana 6 pin output PWM) 6 40mA 3.3V 50mA 32 KB (ATmega328), di mana 0,5 KB digunakan oleh bootloader 2KB (ATmega328) 1KB (ATmega328) 16MHz. 2.4.4. LCD (Liquid Crystal Display)16x4 [17] LCD atau Liquid Crystal Display adalah suatu jenis media display (tampilan) yang menggunakan kristal cair (liquid crystal) untuk menghasilkan gambar yang terlihat. LCD atau Liquid Crystal Display pada dasarnya terdiri dari dua bagian utama yaitu bagian Backlight (Lampu Latar Belakang) dan bagian Liquid Crystal (Kristal Cair). LCD tidak memancarkan pencahayaan apapun, LCD hanya merefleksikan dan mentransmisikan cahaya yang melewatinya. Oleh karena itu, LCD memerlukan Backlight atau Cahaya latar belakang untuk sumber cahayanya. Cahaya Backlight tersebut pada umumnya adalah berwarna putih. Sedangkan Kristal Cair (Liquid Crystal) sendiri adalah cairan organik yang berada diantara dua lembar kaca yang memiliki permukaan transparan.
(29) PLAGIAT MERUPAKAN TINDAKAN TIDAK TERPUJI 17. yang konduktif. Struktur dasar LCD dapat dilihat pada gambar 2.18. Contoh LCD 16x4 tampak depan dapat dilihat pada gambar 2.19 dan contoh LCD 16x4 tampak belakang dapat dilihat pada gambar 2.20.. Gambar 2.17. Struktur dasar LCD [17] Bagian-bagian LCD atau Liquid Crystal Display diantaranya adalah : . Lapisan Terpolarisasi 1 (Polarizing Film 1) Elektroda Positif (Positive Electrode) Lapisan Kristal Cair (Liquid Cristal Layer) Elektroda Negatif (Negative Electrode) Lapisan Terpolarisasi 2 (Polarizing film 2) Backlight atau Cermin (Backlight or Mirror). Tabel 2.3. Spesifikasi LCD 16x4 Pin No. 1 2 3 4 5 6 7-14 15 16. Symbol VSS VDD VO RS R/W E DB0-DB7 A K. Description Ground Power supply for logic Contrast Adjustment Data/ Instruction selesct signal Read/ Write select signal Enable signal Data bus line Power supply for B/L + Power supply for B/L -.
(30) PLAGIAT MERUPAKAN TINDAKAN TIDAK TERPUJI 18. Gambar 2.18. Contoh LCD 16x4 Tampak Depan. Gambar 2.19. Contoh LCD 16x4 Tampak Belakang.
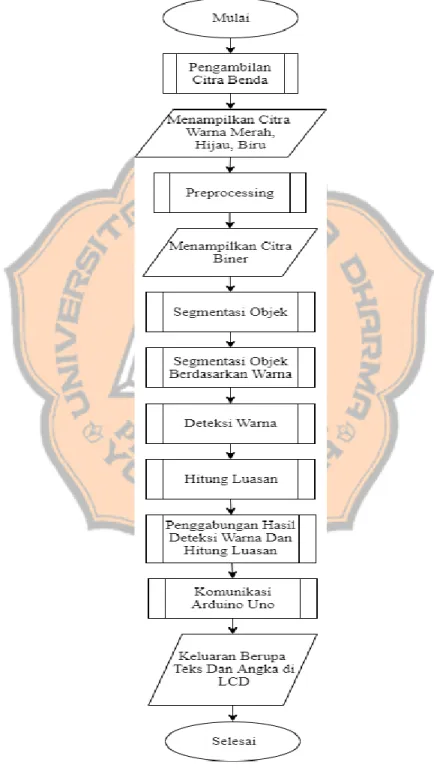
(31) PLAGIAT MERUPAKAN TINDAKAN TIDAK TERPUJI. BAB III PERANCANGAN PENELITIAN 3.1.. Proses Pencacah Benda Berdasarkan Warna Dan Ukuran Bab ini menejelaskan tentang perancangan “Prototipe pencacah benda berdasarkan. Warna dan Ukuran” yang terdiri dari blok diagram, perancangan Hardware dan Software. Perancangan proses mencacah benda berdasarkan warna dan ukuran ditunjukan pada gambar 3.1.. Pengambil citra benda. Komunikasi Arduino uno. Image Preprocessing. Segmentasi Objek. Penggabungan hasil deteksi warna dan hitung luasan. Segmentasi objek berdasarkan warna Hitung Luasan. Keluaran berupa teks dan angka di LCD. Gambar 3.1. Diagram Proses Pengenalan Benda. 19. Deteksi warna.
(32) PLAGIAT MERUPAKAN TINDAKAN TIDAK TERPUJI 20. Berdasarkan gambar blok diagram pada gambar 3.1, proses awal pengenalan benda kubus dengan pengambilan citra benda dilakukan menggunakan webcam, yang dapat mengambil citra Merah, Hijau, Biru secara langsung. Tahap berikutnya yaitu tahap preprocessing, yang mengkonversikan citra Merah, Hijau, Biru ke citra grayscale.. Gambar 3.2. Flowchart keseluruhan sistem pencacah benda.
(33) PLAGIAT MERUPAKAN TINDAKAN TIDAK TERPUJI 21. 3.2. Sistem Pencacah Benda Berdasarkan Warna Dan Ukuran 3.2.1. Pengambilan Citra benda Merupakan proses awal dari sistem pencacah benda berdasarkan warna dan ukuran. Citra benda diambil atau diproses menggunakan Webcam, setelah melalui proses pengambilan citra benda dilanjutkan ke proses matlab. Proses pengambilan citra diawali dengan menghidupkan webcam dan proses capture sistem akan mengambil citra benda yang berbentuk keabuan atau grayscale.. Gambar 3.3. Flowchart pengambilan citra benda. 3.2.2. Image preprocessing Tahap image preprocessing ini dilakukan untuk memperbaiki kesalahan data sinyal gambar yang terjadi akibat transmisi dan selama akusisi sinyal, serta untuk meningkatkan kualitas penampakan gambar agar lebih mudah diinterpretasi oleh sistem penglihatan manusia baik dengan melakukan manipulasi dan juga penganalisian terhadap gambar. Pada.
(34) PLAGIAT MERUPAKAN TINDAKAN TIDAK TERPUJI 22. tahap ini, input berupa citra warna merah, hijau, biru. masukan citra warna merah, hijau, biru dikonversikan menjadi citra grayscale. Sesudah itu citra grayscale dikonversikan menjadi citra biner, setelah mengonversikan citra grayscale menjadi citra biner dilakukan median filtering untuk mengurangi gangguan/noise pada citra digital, keluaran berupa citra biner.. Gambar 3.4. Flowchart preprocessing. 3.2.3. Segmentasi Objek Segmentasi adalah proses pemisahan objek yang satu dengan objek yang yang lain dalam suatu gambar (citra) menjadi objek-objek berdasarkan karakteristik tertentu. Proses segmentasi berhenti ketika obyek yang dicari telah ditemukan. segmentasi memiliki tujuan menemukan karakteristik khusus yang dimiliki suatu citra. Olehkarena itulah, segmentasi.
(35) PLAGIAT MERUPAKAN TINDAKAN TIDAK TERPUJI 23. sangat diperlukan pada proses pengenalan pola. Semakin baikkualitas segmentasi maka semakin baik pula kualitas pengenalan polanya.. Gambar 3.5. Flowchart Segmentasi objek. 3.2.4. Segmentasi Objek Berdasarkan Warna Tahap ini merupakan segmentasi citra yang memisahkan antara objek dengan background berdasarkan ciri warna tertentu dari objek kubus. Pada tahap ini masukan berupa segmen bentuk dan citra warna merah, hijau, biru. Selanjutnya yaitu proses penguraian terhadap komponen warna merah, hijau, biru. Setelah komponen warna diuraikan akan dilakukan proses perkalian antara komponen warna dengan segmen bentuk dilanjutkan.
(36) PLAGIAT MERUPAKAN TINDAKAN TIDAK TERPUJI 24. dengan penggabungan terhadap komponen warna yang akan menghasilkan keluaran berupa matrik segmen warna. Diagram alir segmentasi warna dapat dilihat pada gambar 3.6.. Gambar 3.6. Flowchart segmentasi objek berdasarkan warna.
(37) PLAGIAT MERUPAKAN TINDAKAN TIDAK TERPUJI 25. 3.2.5. Deteksi Warna Pada tahap ini masukan berupa segmen warana, setelah mengambil masukan dari segmen warna akan terjadi penguraian terhadap komponen warna merah, hijau, biru. Penguraian komponen warna dilakukan untuk menghitng nilai-nilai tiap pada komponen warna itu tersebut. Nilai-nilai variabel yang keluar akan mewakili nilai merah, hijau, biru. Jika ada warna benda selain merah, hijau dan biru akan dianggap berwarna biru. Diagram alir pengenalan warna benda dapat dilihat pada gambar 3.7.. Gambar 3.7. Flowchart deteksi warna.
(38) PLAGIAT MERUPAKAN TINDAKAN TIDAK TERPUJI 26. 3.2.6. Hitung Luasan Pada tahap ini, proses awal untuk menghitung ukuran pada tiap-tiap kubus yang berbeda. Cell aray segmen sebagai masukan, setelah segmen diambil akan terjadi proses perhitungan luas benda kubus keluaran berupa matriks luasan.. Gambar 3.8. Flowchart Hitung luasan.
(39) PLAGIAT MERUPAKAN TINDAKAN TIDAK TERPUJI 27. 3.2.7. Penggabungan Hasil Deteksi Warna Dan Hitung Luasan Pada tahap ini, proses perhitungan jumlah benda berdasarkan warna dan ukuran. Masukan awal pada tahan ini berupa segmen warna dan ukuran. Jika ada ukuran benda selain besar, sedang dan kecil akan dianggap berukuran besar. Nilai x1 pada warna merah bernilai 2 sedangkan nilai x2 pada warna merah bernilai 4. Pada warna biru nilai y1 bernilai 2 sedangkan nilai y2 bernilai 4. Pada warna hijau nilai z1 bernilai 2 dan nilai z2 bernilai 4. Nilai x1, y1, z1 akan menunjukan ukuran kecil dan nilai x2, y2, z2 akan menunjukkan nilai sedang.. Gambar 3.9. Flowchart proses penggabungan hasil deteksi warna dan hitung luasan.
(40) PLAGIAT MERUPAKAN TINDAKAN TIDAK TERPUJI 28. Gambar 3.9 (lanjutan) Flowchart proses penggabungan hasil deteksi warna dan hitung luasan. Gambar 3.9 (lanjutan) Flowchart proses penggabungan hasil deteksi warna dan hitung luasan.
(41) PLAGIAT MERUPAKAN TINDAKAN TIDAK TERPUJI 29. 3.2.8. Komunikasi Arduino Pada tahap ini, Arduino berfungsi sebagai pengiriman data dari MATLAB ke LCD. Rangkaian Arduino ke LCD dapat dilihat pada gambar 3.11 dan flowchart proses Arduino Uno dapat diihat pada gambar 3.10 . Berikut contoh format data yang dikirm Arduino ke LCD: jbM. jbH. jbB. jsM. jsH. jsB. jkM. jkH. jkB. 1. 2. 3. 4. 5. 6. 7. 8. 9. Keterangan : 1. Kolom pertama merupakan kolom untuk mengirim hasil jumlah warna merah besar. 2. Kolom kedua merupakan kolom untuk mengirim hasil jumlah warna hijau besar. 3. Kolom ketiga merupakan kolom untuk mengirim hasil jumlah warna biru besar. 4. Kolom empat merupakan kolom untuk mengirim hasil jumlah warna merah sedang. 5. Kolom lima merupakan kolom untuk mengirim hasil jumlah warna hijau sedang. 6. Kolom enam merupakan kolom untuk mengirim hasil jumlah warna biru sedang. 7. Kolom tujuh merupakan kolom untuk mengirim hasil jumlah warna merah kecil. 8. Kolom delapan merupakan kolom untuk mengirim hasil jumlah warna hijau kecil. 9. Kolom Sembilan merupakan kolom untuk mengirim hasil jumlah warna biru kecil.. Gambar 3.10. Flowchart proses Arduino Uno.
(42) PLAGIAT MERUPAKAN TINDAKAN TIDAK TERPUJI 30. Gambar 3.11. Rangkaian Arduino ke LCD. 3.3. Perancangan Tampilan GUI Matlab Perancangan interface pada sistem pencacah benda berdasarkan warna dan ukuran menggunakan GUI ( Graphical User Interface ) yang terdapat pada Matlab dengan tujuan.
(43) PLAGIAT MERUPAKAN TINDAKAN TIDAK TERPUJI 31. membantu dalam proses pencacah benda berdasarkan warna dan ukuran. Diagram alir proses kerja GUI tersebut dapat dilihat pada Gambar 3.12. Rancangan tampilan GUI dapat dilihat pada Gambar 3.13 Mulai. Camera on. Tekan tombol capture. Capture gambar ditampilkan pada kotak benda. Hasil capture ditampilkan pada kotak citra biner. Keluaran berupa text dan angka. Selesai. Gambar 3.12. Diagram alir proses kerja GUI. Gambar 3.13. Tampilan GUI.
(44) PLAGIAT MERUPAKAN TINDAKAN TIDAK TERPUJI 32. Tabel 3.1. Keterangan GUI Nama Bagian Tombol “camera on” Tombol “capture” Tombol “proses” Tombol “exit” Benda Hasil capture Citra Biner Ukuran Komuinkasi. Keterangan Berfungsi untuk menghidupkan kamera Berfungsi untuk mengambil citra objek Untuk memulai proses pengenalan objek Berfungsi untuk mengembalikan ke program awal Berfungsi untuk menampilkan citra secara langsung dari webcam Berfungsi untuk menampilkan citra grayscale Berfungsi untuk menghasilkan citra biner Berfungsi untuk menampilkan ukuran benda Berfungsi untuk menghubungkan antara matlab dengan lcd 16x4. Gambar 3.14. Tampilan LCD 16x4 Tabel 3.2. Keterangan LCD 16x4 Singkatan W R G B BSR SDG KCL. Kepanjangan Warna Red (Merah) Green (Hijau) Blue (Biru) Besar Sedang Kecil.
(45) PLAGIAT MERUPAKAN TINDAKAN TIDAK TERPUJI. BAB IV HASIL DAN PEMBAHASAN Bab ini akan menjelaskan tentang implementasi dari hasil perancangan yang telah dibuat beserta hasil percobaan dan pembahasan mengenai kesesuaian perancangan dengan implementasi. Pengujian sistem pencacah benda berdasarkan warna dan ukuran bertujuan untuk mengetahui sistem yang telah dirancang dapat bekerja dengan baik sesuai dengan perancangan.. 4.1. Hasil Pengujian Dan Analisis 4.1.1. Pengujian Tanpa Rotasi Pengujian tanpa rotasi bertujuan untuk mencari nilai area. Pengujian tanpa rotasi menggunakan variasi yang berkaitan dengan perpindahan peletakkan dari posisi satu ke posisi lainnya. Dalam pengujian tanpa rotasi masukan diperoleh dari bentuk benda persegi yang berukuran 6cm, 4cm, 2cm dengan warna merah, hijau, dan biru. Untuk pengujian tanpa rotasi yang pertama dilakukan yakni benda diletakkan pada posisi awal, posisi awal ditentukan pada posisi tengah atau posisi ke 5 dengan jarak kamera 15cm. Pada tahap pengujian ini terdapat pengambilan data untuk masing-masing benda dengan warna dan ukuran yang berdasarkan seperti warna merah, hijau, biru dengan ukuran 6cm,4cm, dan 2cm. Data yang diperoleh berupa nilai area. Posisi peletakan benda dapat dilihat pada gambar 4.1.. Gambar 4.1. Posisi peletakan benda. 4.1.2. Pengujian Keberhasilan Pencacah Benda Berdasarkan Warna Dan Ukuran Pengujian keberhasilan pencacah benda berdasarkan warna dan ukuran dilakukan sebanyak 100 kali percobaan. Pengujian dilakukan dengan benda yang berwarna merah, hijau, biru atau RGB yang berukuran 6cm, 4cm, dan 2cm. Percobaan ini akan dilakukan 4 33.
(46) PLAGIAT MERUPAKAN TINDAKAN TIDAK TERPUJI 34. kali. Percobaan pertama dilakukan menggunakan 1 benda dengan 9 posisi, percobaan kedua dilakukan untuk 2 benda dengan 9 posisi, percobaan ketiga dilakukan untuk 3 benda dengan 9 posisi, dan percobaan keempat atau yang terakhir menggunakan 4 benda dengan 9 posisi. Tingkat keberhasilan sistem pencacah benda berdasarkan warna dan ukuran dapat dilihat pada tabel 4.1, 4.2, 4.3, 4.4. Tabel 4.1. Percobaan Dengan 1 Benda Percobaan ke-. Keterangan Posisi. Hasil pengujian. Warna dan ukuran. 1. 1. Merah Besar. √. 2. 2. Merah Besar. √. Keterangan : √ = Berhasil, X = Tidak Berhasil. Gambar 4.2. Percobaan dengan 1 benda pada tampilan GUI. Gambar 4.3. Percobaan dengan 1 benda pada tampilan LCD 16x4.
(47) PLAGIAT MERUPAKAN TINDAKAN TIDAK TERPUJI 35. Gambar 4.4. Percobaan dengan 1 benda pada tampilan GUI. Gambar 4.5. Percobaan dengan 1 benda pada tampilan LCD 16x4. Tabel 4.2. Percobaan Dengan 2 Benda Percobaan ke-. Keterangan Posisi. 28. 29. Hasil Pengujian. Warna dan ukuran. 3. Merah Besar. √. 5. Merah Kecil. √. 4. Hijau Besar. √. 2. Hijau Sedang. √. Keterangan : √ = Berhasil, X = Tidak Berhasil.
(48) PLAGIAT MERUPAKAN TINDAKAN TIDAK TERPUJI 36. Gambar 4.6. Percobaan dengan 2 benda pada tampilan GUI. Gambar 4.7. Percobaan dengan 2 benda pada tampilan LCD 16x4. Gambar 4.8. Percobaan dengan 2 benda pada tampilan GUI.
(49) PLAGIAT MERUPAKAN TINDAKAN TIDAK TERPUJI 37. Gambar 4.9. Percobaan dengan 2 benda pada tampilan LCD 16x4. Tabel 4.3. Percobaan Dengan 3 Benda Percobaan ke-. Keterangan Posisi. 51. 52. Hasil pengujian. Warna dan ukuran. 1. Merah Besar. √. 2. Merah Sedang. √. 3. Hijau kecil. √. 4. Biru Besar. √. 5. Hijau Kecil. √. 6. Biru Kecil. √. Keterangan : √ = Berhasil, X = Tidak Berhasil. Gambar 4.10. Percobaan dengan 3 benda pada tampilan GUI.
(50) PLAGIAT MERUPAKAN TINDAKAN TIDAK TERPUJI 38. Gambar 4.11. Percobaan dengan 3 benda pada tampilan LCD 16x4. Gambar 4.12. Percobaan dengan 3 benda pada tampilan GUI. Gambar 4.13. Percobaan dengan 3 benda pada tampilan LCD 16x4.
(51) PLAGIAT MERUPAKAN TINDAKAN TIDAK TERPUJI 39. Tabel 4.4. Percobaan Dengan 4 Benda Percobaan ke-. Keterangan Posisi. 69. 70. Hasil pengujian. Warna dan ukuran. 1. Merah Sedang. √. 2. Merah Kecil. √. 3. Hijau Kecil. √. 4. Biru Kecil. √. 1. Biru Besar. √. 3. Hijau Besar. √. 5. Biru Kecil. √. 7. Hijau Sedang. √. Keterangan : √ = Berhasil, X = Tidak Berhasil. Gambar 4.14. Percobaan dengan 4 benda pada tampilan GUI. Gambar 4.15. Percobaan dengan 4 benda pada tampilan LCD 16x4.
(52) PLAGIAT MERUPAKAN TINDAKAN TIDAK TERPUJI 40. Gambar 4.16. Percobaan dengan 4 benda pada tampilan GUI. Gambar 4.17. Percobaan dengan 4 benda pada tampilan LCD 16x4. Dapat dilihat berdasarkan tabel 4.1, 4.2, 4.3, 4.4 data hasil percobaan dapat disimpulkan tanpa adanya rotasi sistem pencacah benda berdasakan warna dan ukuran dapat mengenali warna dan ukuran dengan benar. Tampilan data pada GUI dapat dilihat pada gambar 4.2, 4.4, 4.6, 4.8, 4.10, 4.12, 4.14, 4.16 dan data pada tampilan LCD 16x4 dapat dilihat pada gambar 4.3, 4.5, 4.7, 4.9, 4.11, 4.13, 4.15, 4.17.. 4.1.3. Pengujian Pengaruh Rotasi Pengujian pengaruh rotasi ini dilakukan untuk mengetahui rotasi terhadapat tingkat pengenalan benda berdasarkan warna dan ukuran dengan metode area. Dalam pengujian pengaruh rotasi masukan berupa benda persegi yang memiliki warna merah, hijau, biru.
(53) PLAGIAT MERUPAKAN TINDAKAN TIDAK TERPUJI 41. dengan berukuran 6cm, 4cm, dan 2cm. pada percobaan pengaruh rotasi ini ditetapkan yakni 0˚, 15˚, 30˚, 45˚, 60˚, 75˚, 90˚. Benda digerakkan secara manual sesuai dengan rotasi yang sudah di tetapkan. Pertama, sudah diketahui bahwa posisi 5 adalah titik 0 dari rotasi awal. Benda yang diletakkan pada posisi awal dengan jarak kamera 15cm dari permukaan benda. Kedua akan diteruskan memutar benda sampai rotasi 90˚. Dari pengujian pengaruh rotasi ini dapat diketahui nilai-nilai rotasi berupa nilai area. Hasil pengujian pengaruh rotasi nilai area dapat dilihat pada tabel 4.5. Tabel 4.5. Nilai Area Warna. Area. dan. Rotasi. Ukuran. 0˚. 15˚. 30˚. 45˚. 60˚. 75˚. 90˚. Rb. 58034. 58796. 58974. 58042. 58815. 58193. 58150. Rs. 25571. 25586. 25679. 25998. 25561. 25561. 25543. Rk. 6640. 6632. 6635. 6648. 6657. 6673. 6684. Gb. 57961. 58041. 58164. 58372. 58431. 57871. 58363. Gs. 25731. 25765. 25698. 25992. 25887. 25437. 25318. Gk. 6653. 6644. 6661. 6683. 6609. 6678. 6649. Bb. 58051. 58163. 58085. 58191. 58241. 58671. 58763. Bs. 25486. 25493. 25571. 25658. 25691. 25641. 25736. Bk. 6632. 6678. 6662. 6643. 6609. 6759. 6620. Dari tabel hasil percobaan dengan rotasi 0˚, 15˚, 30˚, 45˚, 60˚, 75˚, 90˚ dapat dilihat dari tabel 4.5 nilai area. Perubahan nilai area dari 0˚ sampai 90˚ tidak begitu ada perubahan yang sangat pesat dikarenakan nilai area merupakan nilai luas suatu benda.. 4.1.4. Pengujian Data Untuk Benda Tertumpuk Pengujian data untuk benda tertumpuk dilakukan untuk mengetahui tingkat pengenalan benda berdasarkan warna dan ukuran. Dalam pengujian data untuk benda tertumpuk masukan berupa benda persegi yang memiliki warna merah dan biru dengan berukuran 6cm..
(54) PLAGIAT MERUPAKAN TINDAKAN TIDAK TERPUJI 42. Gambar 4.18. Percobaan benda tertumpuk Percobaan data benda tertumpuk ini diberi masukan berupa benda besar yang berukuran 6cm dengan 2 warna yaitu merah dan biru. Benda besar persegi merah yang tertumpuk oleh benda besar persegi biru akan terbaca oleh matlab sebagai benda besar persegi biru dikarenakan benda persegi biru berada diatas benda persegi merah. Percobaan benda tertumpuk dapat dilihat pada gambar 4.18.. 4.1.5. Pengujian Data Untuk Benda Terpotong Pengujian data untuk benda terpotong dilakukan untuk mengetahui tingkat pengenalan benda berdasarkan warna dan ukuran. Data untuk benda terpotong yaitu data benda atau masukan yang hanya tertangkap camera webcam dan bukan ukuran benda sebenarnya.. Gambar 4.19. Percobaan benda terpotong.
(55) PLAGIAT MERUPAKAN TINDAKAN TIDAK TERPUJI 43. Gambar 4.20. Masukan benda untuk data terpotong Pada percobaan data benda terpotong ini diberi masukkan berupa benda persegi merah besar, merah sedang, hijau besar, hijau sedang, biru besar, dan biru sedang. Dari masukkan tersebut dapat dilihat pada gambar 4.20. Keluaran dari masukkan tersebut didapatkan hasil yaitu benda persegi merah sedang, merah kecil, hijau sedang, hijau kecil, biru sedang, dan biru kecil dikarenakan camera webcam hanya menangkap masukkan sebagian saja dan bukan ukuran sebenarnya, matlab menghitung luasan benda yang telah didapatkan oleh camera webcam dan terdapat hasil keluarannya dapat dilihat pada gambar 4.19.. 4.2. Program Utama 4.2.1. Program Matlab. Gambar 4.21. Program pengambilan citra benda Gambar 4.21 merupakan proses awal dari sistem pencacah benda berdasarkan warna dan ukuran. Citra benda diambil atau diproses menggunakan Webcam. Proses pengambilan citra diawali dengan start yaitu berfungsi menghidupkan webcam setelah webcam dihidupkan akan di pause selama 0.5 detik untuk mengambil data dan disimpan..
(56) PLAGIAT MERUPAKAN TINDAKAN TIDAK TERPUJI 44. Gambar 4.22. Program image preprocessing Gambar 4.22 merupakan tahapan untuk image preprocessing dilakukan untuk memperbaiki kesalahan data sinyal gambar yang terjadi akibat transmisi dan selama akusisi sinyal, serta untuk meningkatkan kualitas penampakan gambar agar lebih mudah diinterpretasi oleh sistem penglihatan manusia baik dengan melakukan manipulasi dan juga penganalisian terhadap gambar. Pada tahap ini, b= im2bw merupakan input berupa citra warna merah, hijau, biru. masukan citra warna merah, hijau, biru dikonversikan menjadi citra grayscale. Sesudah itu citra grayscale dikonversikan menjadi citra biner, setelah mengonversikan citra grayscale menjadi citra biner dilakukan median filtering atau dalam matlab medfit2 untuk mengurangi gangguan/noise pada citra digital, keluaran berupa citra biner.. Gambar 4.23. Program segmentasi objek Gambar 4.23 merupakan proses pemisahan objek yang satu dengan objek yang yang lain dalam suatu gambar (citra) menjadi objek-objek berdasarkan karakteristik tertentu. Proses segmentasi berhenti ketika obyek yang dicari telah ditemukan. segmentasi memiliki tujuan menemukan karakteristik khusus yang dimiliki suatu citra. Olehkarena itulah, segmentasi sangat diperlukan pada proses pengenalan pola. Semakin baik kualitas segmentasi maka semakin baik pula kualitas pengenalan polanya..
(57) PLAGIAT MERUPAKAN TINDAKAN TIDAK TERPUJI 45. Gambar 4.24. Program segmentasi objek berdasarkan warna Gambar 4.24 merupakan tahap untuk memisahkan antara objek dengan background berdasarkan ciri warna tertentu dari objek kubus. Pada tahap ini masukan berupa segmen bentuk dan citra warna merah, hijau, biru. Selanjutnya yaitu proses penguraian terhadap komponen warna merah, hijau, biru. Setelah komponen warna diuraikan akan dilakukan proses perkalian antara komponen warna dengan segmen bentuk dilanjutkan dengan penggabungan terhadap komponen warna yang akan menghasilkan keluaran berupa matrik segmen warna.. Gambar 4.25. Program deteksi warna Gambar 4.25 merupakan tahapan deteksi warna, masukan berupa segmen warna, setelah mengambil masukan dari segmen warna akan terjadi penguraian terhadap komponen warna merah, hijau, biru. Penguraian komponen warna dilakukan untuk menghitng nilainilai tiap pada komponen warna itu tersebut. Nilai-nilai variabel yang keluar akan mewakili nilai merah, hijau, biru..
(58) PLAGIAT MERUPAKAN TINDAKAN TIDAK TERPUJI 46. Gambar 4.26. Program penggabungan hasil deteksi warna dan hitung luasan Gambar 4.26 merupakan tahap penggabungan hasil deteksi warna dan hitung luasan. Strcmp berfungsi untuk membandingkan ukuran hitung luasannya. Pada masing-masing warna diberikan nilai untuk menentukan suatu ukuran benda seperti benda berukuran besar bernilai diatas 50000, benda berukuran sedang bernilai diatas 23500 dan benda berukuran kecil bernilai diatas 10. 4.2.2. Program Arduino Uno. Gambar 4.27. Program pemanggilan library.
(59) PLAGIAT MERUPAKAN TINDAKAN TIDAK TERPUJI 47. Gambar 4.27 merupakan listing program pemanggilan library, inisialisai pin dan inisialisai variabel. Pada penelitian ini menggunakan library LiquidCrystal.h yang digunakan untuk mengakses LCD. LiquidCrystal lcd(8,9,4,5,6,7) merupakan inisialisai pin yang digunakan untuk menghubungkan LCD 16x4 dengan arduino. Variabel yang digunakan dalam penelitian ini dapat dilihat pada tabel 4.5. Tabel 4.6. Nama variable Arduino Uno No. Nama Variabel. Keterangan. 1. jbr. Jumlah besar merah. 2. jbg. Jumlah besar hijau. 3. jbb. Jumlah besar biru. 4. jsr. Jumlah sedang merah. 5. jsg. Jumlah sedang hijau. 6. jsb. Jumlah sedang biru. 7. jkr. Jumlah kecil merah. 8. jkg. Jumlah kecil hijau. 9. jkb. Jumlah kecil biru. 10. readString. Data yang diterima. Gambar 4.28. Program inisialisasi baudrate dan type LCD Pada gambar 4.28 merupakan inisialisasi baudrate dan type LCD. Serial.begin(9600) merupakan program untuk menginisialisasi baudrate. Baudrate yang digunakan yaitu 9600. lcd.begin(16,4) merupakan program untuk menginisialisasi tipe lcd yang digunakan.. Gambar 4.29. Program judul baris dan kolom.
(60) PLAGIAT MERUPAKAN TINDAKAN TIDAK TERPUJI 48. Gambar 4.29 merupakan judul baris dan kolom. Judul baris dan kolom digunakan untuk mempermudah membaca data.Tampilan LCD terbagi menjadi kolom dan baris. Dalam penelitian ini menggunakan LCD 16x4 jadi terdiri dari 16 baris dan 4 kolom. Setiap baris dan kolom dimulai dari 0. Penempatan judul dalam kolom dan baris dapat dilihat pada tabel 4.6. Tabel 4.7. Penempatan judul dalam kolom dan baris Arduino Uno No. Data. Baris. Kolom. Keterangan. 1. W. 0. 0. Warna. 2. R. 0. 1. Merah. 3. G. 0. 2. Hijau. 4. B. 0. 3. Biru. 5. BSR. 3. 0. Besar. 6. SDG. 8. 0. Sedang. 7. KCL. 13. 0. Kecil. Gambar 4.30. Program pemecahan karakter Gambar 4.30 merupakan listing program pemecahan karakrter dari data yang diterima. Pemecahan data ini berdasarkan struktur pengiriman data. Pemecahan data ini.
(61) PLAGIAT MERUPAKAN TINDAKAN TIDAK TERPUJI 49. dibagi menjadi 9 bagian dan setiap bagian berisi 2 karakter. Data di pecah dan dimasukkan dalam variabel yang telah ditentukan seperti pada tabel 4.8.. Gambar 4.31. Program penempatan data dalam LCD Gambar 4.31 merupakan penempatan data dalam LCD. Stelah data dipecah data akan di tampilkan pada lcd. Tampilan LCD terbagi menjadi kolom dan baris. Dalam penelitian ini menggunakan LCD 16x4 jadi terdiri dari 16 baris dan 4 kolom. Setiap baris dan kolom dimulai dari 0. Penempatan data dalam kolom dan baris dapat dilihat pada tabel 4.7. Tabel 4.8. Penempatan data dalam kolom dan baris Arduino Uno NO. Data. Baris. Kolom. 1. jbr. 3. 1. 2. jbg. 8. 1. 3. jbb. 13. 1. 4. jsr. 3. 2. 5. jsg. 8. 2. 6. jsb. 13. 2. 7. jkr. 3. 3. 8. jkg. 8. 3. 9. jkb. 13. 3.
(62) PLAGIAT MERUPAKAN TINDAKAN TIDAK TERPUJI 50. 4.3. Beberapa Catatan Pengujian pencacah benda berdasarkan warna dan ukuran memiliki beberapa catatan penulisan tugas akhir ini yang mempengaruhi tingkat pengenalan. Berikut adalah beberapa catatan penulisan ini. 1. Intensitas cahaya berpengaruh pada saat pengujian terhadap tingkat pengenalan oleh karena itu penulis menggunakan lampu LED dengan intensitasnya bisa diatur. 2. Menggunakan resolusi kamera 640x480 piksel. 3. Implementasi program yang dirancang pada BAB III, terdapat pada lampiran.. 4.4. Perbandingan Dengan Penelitian Sebelumnya Hasil penulisan tugas akhir ini dibandingkan dengan hasil penelitian sebelumnya oleh Mahendra. Hasil perbandingan penelitian pada table 4.8. Tabel 4.9. Hasil Perbandingan Penelitian [1]. Penelitian sebelumnya. Penelitian sekarang. Posisi peletakkan benda sudah ditentukan. Posisi peletakan benda secara acak. Hanya mengenali warna benda. Mengenali warna dan ukuran. 1 ukuran kubus dengan 3 warna (RGB). 3 ukuran kubus (Besar, Sedang, Kecil) dengan 3 warna (RGB).
(63) PLAGIAT MERUPAKAN TINDAKAN TIDAK TERPUJI. BAB V KESIMPULAN DAN SARAN 5.1.. Kesimpulan Berdasarkan hasil percobaan dan pengujian sistem pencacah benda berdasarkan warna dan ukuran dapat disimpulkan bahwa :. 1. Alat dapat menampilkan keluaran berdasarkan warna dan ukuran di lcd dengan tingkat keberhasilan mencapai 100% apabila benda tidak bersentuhan dan terpotong. 2. Pada pengujian benda yang dirotasi dan dipindah-pindah tingkat pengenalan mencapai 100%.. 5.2.. Saran Setelah melakukan percobaan dan pengujian terdapat saran untuk penelitian selanjutnya :. 1. Kotak hitam diperbesar untuk memuat benda yang berukuran besar. 2. Mempertinggi peletakan webcam c270 untuk mengambil benda berukuran besar jika benda berukuran besar banyak dibutuhkan.. 51.
(64) PLAGIAT MERUPAKAN TINDAKAN TIDAK TERPUJI. DAFTAR PUSTAKA [1]. Mahendra, R.B.D., 2011, Aplikasi Pengenalan Objek Untuk Lengan Robot Pemisah Benda Berdasarkan Warna,Benda, Tugas akhir, Jurusan Teknik Elektro, FST, Universitas Sanata Dharma, Yogyakarta.. [2]. ----.,. 2013,. Pengertian. Computer. Vision,. https://www.temukanpengertian.com/2013/08/pengertian-computer-vision.html, diakses 5 Oktober 2019 [3]. Shaleh,. S.,. ----,. Pengertian. WebCam. dan. Jenisnya,. https://rumahshaleh.com/pengertian-webcam-dan-jenisnya/, diakses 05 Oktober 2019 [4]. Logitech, Webcam., ----, https://support.logitech.com/en_product/hd-webcam-c270, diakses 05 Oktober 2019. [5]. Indiamart.,. 2014,. Logitech. HD. Webcam. C270,. https://www.indiamart.com/proddetail/logitech-hd-webcam-c27019218951848.html, diakses 5 Oktober 2019 [6]. ----.,. 2013,. Pengertian. Citra. Digital,. https://www.temukanpengertian.com/2013/08/pengertian-citra-digital.html, diakses 5 Oktober 2019 [7]. Pamungkas,. A.,. ----,. Pemrograman. Matlab(Pengolahan. Citra),. https://pemrogramanmatlab.com/2017/07/26/pengolahan-citra-digital/, diakses 05 Oktober 2019 [8]. ----.,. 2014,. Metode. Grayscale,. http://library.binus.ac.id/eColls/eThesisdoc/Bab2/2014-2-00288SK%20Bab2001.pdf, diakses 5 Oktober 2019 [9]. Pamungkas,. A.,. ----,. Pemrograman. Matlab(Citra. Biner),. https://pemrogramanmatlab.com/tag/pengertian-citra-biner/, diakses 05 Oktober 2019 [10]. Pamungkas, A., ----, Pemrograman Matlab(Pengolahan Citra Digital (RGB, Grayscale,. dan. Biner). Menggunakan. GUI. https://pemrogramanmatlab.com/2015/12/27/pengolahan-citra-digital-rgbgrayscale-biner-menggunakan-gui-matlab/, diakses 05 Oktober 2019. 52. Matlab),.
(65) PLAGIAT MERUPAKAN TINDAKAN TIDAK TERPUJI 53. [11]. Pamungkas, A., ----, Pemrograman Matlab(citra grayscale menjadi biner), https://pemrogramanmatlab.com/tag/konversi-citra-grayscale-menjadi-biner/, diakses 05 Oktober 2019. [12]. Maulana, A., Andono, P.N., 2016, Analisa Perbandingan Adaptif Median Filtering dan Filter dalam Reduksi Noise Salt & Pepper, vol.2, no.2.. [13]. Kadir, A., Susanto, A., 2013, Teori dan Aplikasi Pengolahan Citra, Yogyakarta.. [14]. Pamungkas, A., ---- Pemrograman Matlab(Segmentasi Warna Citra Digital), https://pemrogramanmatlab.com/2016/11/09/segmentasi-warna-citra-digital/, diakses 05 Oktober 2019. [15]. Marquez, O ., 2011, Practical Image and Video Processing Using MATLAB, Jhon Wiley dan Sons.. [16]. ----.,. ----,. BAB. II. TINJAUAN. PUSTAKA. Arduino. http://eprints.polsri.ac.id/4582/3/File%203%20-%20BAB%20II.pdf,. Uno,. diakses. 5. Oktober 2019 [17]. ----., ----, Pengertian LCD (Liquid Crystal Display) dan Prinsip Kerja LCD, https://teknikelektronika.com/pengertian-lcd-liquid-crystal-display-prinsip-kerjalcd/, diakses 6 Oktober 2019.
(66) PLAGIAT MERUPAKAN TINDAKAN TIDAK TERPUJI. LAMPIRAN. 54.
(67) PLAGIAT MERUPAKAN TINDAKAN TIDAK TERPUJI. Lampiran 1. Data Percobaan Tabel L1. Data percobaan benda berdasarkan warna dan ukuran Percobaan keKeterangan Hasil pengujian Posisi. Warna dan ukuran. 1. 1. Merah Besar. √. 2. 2. Merah Besar. √. 3. 3. Merah Besar. √. 4. 4. Hijau Besar. √. 5. 5. Hijau Besar. √. 6. 6. Hijau Besar. √. 7. 7. Biru Besar. √. 8. 8. Biru Besar. √. 9. 9. Biru Besar. √. 10. 1. Merah Sedang. √. 11. 2. Merah Sedang. √. 12. 3. Merah Sedang. √. 13. 4. Hijau Sedang. √. 14. 5. Hijau Sedang. √. 15. 6. Hijau Sedang. √. 16. 7. Biru Sedang. √. 17. 8. Biru Sedang. √. 18. 9. Biru Sedang. √. 19. 1. Merah Kecil. √. 20. 2. Merah Kecil. √. 21. 3. Merah Kecil. √. 22. 4. Hijau Kecil. √. 23. 5. Hijau Kecil. √. 24. 6. Hijau Kecil. √. 25. 7. Biru Kecil. √. 26. 8. Biru Kecil. √. 27. 9. Biru Kecil. √. 28. 3. Merah Besar. √.
(68) PLAGIAT MERUPAKAN TINDAKAN TIDAK TERPUJI. Tabel L1. (Lanjutan) Data percobaan benda berdasarkan warna dan ukuran 5 Merah Kecil √ 29. 30. 31. 32. 33. 34. 35. 36. 37. 38. 39. 40. 41. 42. 43. 4. Hijau Besar. √. 2. Hijau Sedang. √. 7. Biru Kecil. √. 1. Biru Besar. √. 9. Merah sedang. √. 4. Hijau sedang. √. 3. Biru Besar. √. 8. Hijau Kecil. √. 2. Hijau Kecil. √. 8. Biru Kecil. √. 6. Merah Sedang. √. 4. Biru Kecil. √. 9. Biru Besar. √. 7. Hijau Sedang. √. 3. Merah Kecil. √. 7. Biru Besar. √. 5. Merah Sedang. √. 7. Hijau Besar. √. 7. Biru Sedang. √. 8. Hijau Sedang. √. 4. Biru Kecil. √. 3. Merah Besar. √. 2. Merah Besar. √. 9. Hijau Besar. √. 1. Merah Kecil. √. 2. Merah Sedang. √. 7. Biru Sedang. √. 9. Hijau Kecil. √. 4. Biru Kecil. √. 5. Merah Kecil. √.
(69) PLAGIAT MERUPAKAN TINDAKAN TIDAK TERPUJI. Tabel L1. (Lanjutan) Data percobaan benda berdasarkan warna dan ukuran 44 6 Hijau Sedang √. 45. 46. 47. 48. 49. 50. 51. 52. 53. 54. 55. 56. 1. Merah Besar. √. 3. Biru Sedang. √. 9. Merah Kecil. √. 7. Merah Besar. √. 3. Merah Kecil. √. 1. Hijau Kecil. √. 6. Merah Kecil. √. 2. Hijau Besar. √. 8. Hijau Sedang. √. 3. Biru Sedang. √. 1. Biru Kecil. √. 2. Hijau Kecil. √. 5. Merah Sedang. √. 1. Merah Besar. √. 2. Merah Sedang. √. 3. Hijau kecil. √. 4. Biru Besar. √. 5. Hijau Kecil. √. 6. Biru Kecil. √. 7. Merah Sedang. √. 8. Hijau Sedang. √. 9. Biru Sedang. √. 9. Merah Kecil. √. 8. Biru Kecil. √. 2. Hijau Kecil. √. 1. Biru Besar. √. 2. Biru kecil. √. 4. Hijau kecil. √. 6. Hijau Kecil. √. 7. Biru Besar. √.
(70) PLAGIAT MERUPAKAN TINDAKAN TIDAK TERPUJI. Tabel L1. (Lanjutan) Data percobaan benda berdasarkan warna dan ukuran 9 Merah Kecil √ 57. 58. 59. 60. 61. 62. 63. 64. 65. 66. 4. Biru Sedang. √. 6. Merah Sedang. √. 9. Biru Kecil. √. 3. Biru Besar. √. 6. Biru kecil. √. 9. Merah kecil. √. 2. Hijau Sedang. √. 4. Hijau Besar. √. 6. Biru Sedang. √. 1. Biru Besar. √. 3. Hijau Besar. √. 5. Merah Kecil. √. 7. Biru Kecil. √. 9. Hijau Besar. √. 1. Merah Kecil. √. 4. Hijau Besar. √. 3. Hijau Kecil. √. 6. Biru Kecil. √. 2. Merah Sedang. √. 7. Merah Kecil. √. 5. Biru Kecil. √. 3. Merah Sedang. √. 8. Hijau Sedang. √. 1. Biru Sedang. √. 6. Biru Kecil. √. 5. Merah Sedang. √. 4. Biru Sedang. √. 6. Hijau Sedang. √. 1. Hijau Kecil. √. 4. Biru Kecil. √.
Gambar
![Tabel 2.1. Spesifikasi Logitech C270 [4]](https://thumb-ap.123doks.com/thumbv2/123dok/1862955.2661846/16.893.125.772.956.1127/tabel-spesifikasi-logitech-c.webp)

![Gambar 2.6. Grayscale Level [8]](https://thumb-ap.123doks.com/thumbv2/123dok/1862955.2661846/20.893.123.786.215.841/gambar-grayscale-level.webp)
+7
![Gambar 2.9. Konversi Warna RGB ke grayscale [10]](https://thumb-ap.123doks.com/thumbv2/123dok/1862955.2661846/22.893.205.763.123.398/gambar-konversi-warna-rgb-ke-grayscale.webp)
Dokumen terkait
Warna yang disukai mempunyai urutan seperti berikut: merah, biru, ungu, hijau, jingga, kuning.. Breeds dan SE, Katz warna merah lebih popular untuk wanita dan biru
Rumusan masalah dalam penelitian adalah merancang robot yang dapat mencari alamat berdasarkan 4 warna (merah, hijau, biru dan hitam). Tujuan dari penelitian ini
Percampuran dua warna pokok disebut warna sekunder, yaitu merah dan biru menjadi ungu, merah dan kuning menjadi oranye, hijau dan ungu menjadi hijau ungu.. Percampuran
Tiga warna hasil dari perpaduan komponen dasar merah, hijau, biru yaitu kuning, cyan, dan ungu, ketiga warna ini akan menghasilkan warna putih jika ditambah
• Byte pertama dari kiri [11111111] = Alpha (nilai transparansi citra). Untuk proses penelitian kali ini hanya memproses nilai warna Merah, Hijau dan Biru, karena citra
Pemberongsongan menggunakan lima warna plastik (merah, kuning, hijau, biru, dan bening) berbahan HDPE ( High Density Polyethylene ) dengan ukuran 27 cm x 13.5 cm
Benda padat selanjutnya yang di deteksi oleh sensor warna adalah warna biru,maka secara otomatis servo 2 akan menutup atau menyortir benda padat tersebut untuk masuk ke
Warna RGB (Merah Hijau Biru) digunakan untuk grafis komputer, dapat diprogram menggunakan Adobe
