TUGAS AKHIR
PENCACAH BENDA BERDASARKAN BENTUK, UKURAN, DAN KODE ANGKA
Diajukan untuk memenuhi syarat memperoleh gelar Sarjana Teknik pada
Program Studi Teknik Elektro
Fakultas Sains dan Teknologi Universitas Sanata Dharma
Disusun Oleh:
YUVENTIUS YOSIAN VICKO PRANANDA NIM : 175114002
PROGRAM STUDI TEKNIK ELEKTRO FAKULTAS SAINS DAN TEKNOLOGI
UNIVERITAS SANATA DHARMA YOGYAKARTA
2021
FINAL PROJECT
THE COUNTER OF OBJECTS BASED ON SHAPE, SIZE, AND CODE NUMBER
Presented as Partial Fulfillment of the Requirements to Obtain the Bachelor of Engineering Degree in
Study Program of Electrical Engineering
Faculty of Science and Technology, Sanata Dharma University
Written By:
YUVENTIUS YOSIAN VICKO PRANANDA NIM : 175114002
ELECTRICAL ENGINEERING STUDY PROGRAM FACULTY OF SCIENCE AND TECHNOLOGY
SANATA DHARMA UNIVERSITY YOGYAKARTA
2021
iii
v
PERNYATAAN KEASLIAN KARYA
Saya menyatakan dengan sesungguhnya bahwa tugas akhir yang saya tulis ini tidak memuat karya atau bagian dari karya orang lain, kecuali yang telah disebutkan dalam kutipan dan daftar pustaka, sebagaimana layaknya karya ilmiah.
Yogyakarta, 27 Agustus 2021
Yuventius Yosian Vicko Prananda
HALAMAN PERSEMBAHAN DAN MOTTO HIDUP
MOTTO:
‘ Choose Your Love, Love Your Choice’
Dalam nama Bapa, Putra, & Roh Kudus Amin
Skripsi ini saya persembahkan untuk :
‘Tuhan Yesus Kristus,
Bapak, Ibu, Adik-adikku, Nenek, keluarga besar Giyo Siswoko, dan Ripto Yuwono untuk doa dan kasih sayang serta dukungannya,
Teman-teman atas motivasi dan semangat yang diberikan,
Almamaterku Teknik Elektro Universitas Sanata Dharma Yogyakarta’
vii
HALAMAN PERNYATAAN PERSETUJUAN PUBLIKASI KARYA ILMIAH UNTUK
KEPENTINGAN AKADEMIS
Yang bertanda tangan dibawah ini, saya mahasiswa Universitas Sanata Dharma :
Nama : YUVENTIUS YOSIAN VICKO PRANANDA
Nomor Mahasiswa : 175114002
Demi pengembangan ilmu pengetahuan, saya memberikan kepada perpustakaan Universitas Sanata Dharma karya ilmiah saya yang berjudul :
PENCACAH BENDA BERDASARKAN BENTUK, UKURAN, DAN KODE ANGKA
Beserta perangkat yang diperlukan (bila ada). Dengan demikian, saya memberikan kepada Perpustakaan Universitas Sanata Dharma hak untuk menyimpan, mengalihkan dalam bentuk media lain, mengelolanya dalam bentuk pangkalan data, mendistribusikan secara terbatas, dan mempublikasikannya di internet atau media lain untuk kepentingan akademis tanpa perlu meminta ijin dari saya maupun memberikan royalti kepada saya selama tetap mencantumkan nama saya sebagai penulis. Demikian pernyataan ini saya buat dengan sebenarnya.
Yogyakarta, 27 Agustus 2021
Yuventius Yosian Vicko Prananda
INTISARI
Perkembangan teknologi saat ini begitu pesat, terutama dalam bidang image processing yang memberi kemungkinan manusia dalam membuat sistem yang mampu mengenali citra digital. Image processing adalah teknik mengolah citra yang mentranformasikan citra masukan menjadi citra lain agar keluaran memiliki kualitas lebih baik. Image processing merupakan salah satu bagian dari computer vision yang bertujuan mengenali dan menganalisis benda di sekitarnya pada komputer.
Berdasarkan hal tersebut, diperlukan suatu sistem yang dapat digunakan untuk mengelompokkan dan menghitung benda berdasarkan bentuk, ukuran, dan kode angka.
Untuk menentukan bentuk suatu benda menggunakan metode extent circle, yaitu metode yang memungkinkan untuk melingkupi area kontur suatu objek di dalam sebuah lingkaran.
Untuk penentuan ukuran benda menggunakan metode perimeter atau keliling. Sedangkan untuk penentuan kode angka menggunakan metode area atau luas dari bentuk kode angka tersebut.
Hasil dari penelitian ini adalah sistem dapat mencacah benda berdasarkan bentuk, ukuran, dan kode angka dari 3 macam bentuk benda, segitiga, persegi, dan bundar, 3 macam ukuran, kecil, sedang, dan besar, serta 3 macam kode angka, kode 1, kode 2, dan kode 3.
Pengujian dengan variasi translasi, rotasi, dan jumlah benda yang berbeda oleh sistem mencapai 100% dengan catatan intensitas cahaya, translasi, dan rotasi sangat berpengaruh dalam pengujian.
Kata kunci : Computer vision, image processing, extent circle, perimeter, area.
ix
ABSTRACT
The development of technology is currently so rapid, especially in the field of image processing which gives humans the possibility to create systems that can recognize digital images. Image processing is an image processing technique that transforms the input image into another image so that the output has better quality. Image processing is one part of computer vision that aims to recognize and analyze objects around it on a computer.
Based on this, we need a system that can be used to group and count objects based on shape, size, and number code. To determine the shape of an object using the extent circle method, which is a method that allows covering the contour area of an object in a circle. To determine the size of objects using the perimeter or circumference method. As for determining the number code using the area or area method of the form of the number code.
The results of this study are the system can count objects based on shape, size, and numeric code from 3 kinds of object shapes, triangle, square, and round, 3 kinds of sizes, small, medium, and large, as well as 3 kinds of numeric codes, code 1, code 2, and code 3.
Testing with variations of translation, rotation, and the different number of objects by the system reaches 100% with a note that light intensity, translation, and rotation are very influential in the test.
Keywords: Computer vision, image processing, extent circle, perimeter, area.
KATA PENGANTAR
Puji dan Syukur penulis panjatkan kepada Tuhan Yang Maha Esa atas segala berkat dan rahmat-Nya, sehingga penulis dapat menyelesaikan tugas akhir ini dengan baik. Penulis menyadari bahwa banyak pihak yang telah memberikan doa, dukungan, motivasi serta bantuan kepada penulis sehingga dapat menyelesaikan tugas akhir ini. Oleh karena itu, penulis mengucapkan terima kasih kepada :
1) Sudi Mungkasi, S.Si., M.Math.Sc., Ph.D., selaku Dekan Fakultas Sains dan Teknologi Universitas Sanata Dharma Yogyakarta.
2) Ir. Tjendro, M.Kom., selaku Ketua Program Studi Teknik Elektro Universitas Sanata Dharma Yogyakarta.
3) Ir. Th. Prima Ari Setyani, M.T., selaku dosen pembimbing akademik yang telah mendampingi dan membimbing penulis selama perkuliahan.
4) Dr. Linggo Sumarno selaku dosen pembimbing yang dengan penuh perhatian, kesabaran dan selalu meluangkan waktu untuk memberi bimbingan, kritik, saran serta motivasi dalam penulisan tugas akhir ini.
5) Dr. Iswanjono dan Ir. Damar Widjaja, Ph.D., selaku dosen penguji yang telah bersedia memberi kritik, saran, dan bimbingan dalam memperbaiki tugas akhir ini.
6) Bapak/Ibu dosen yang telah mengajarkan banyak hal selama penulis menempuh pendidikan di Program Studi Teknik Elektro, Fakultas Sains dan Teknologi, Universitas Sanata Dharma Yogyakarta.
7) Bapak Albertus Purwoko Sunu dan Ibu Yosephine Suryani selaku orangtua saya, Gracia Vania Angeli Noviantika, Faustina Vanya Mayndeta Pawestri, dan nenek yang sangat saya sayangi dan banggakan, yang selalu mendukung, serta mendoakan yang terbaik sehingga penulis dapat menyelesaikan tugas akhir ini.
8) Keluarga besar Giyo Siswoko dan Ripto Yuwono yang telah mendoakan dan memberi motivasi sehingga penulis dapat menyelesaikan tugas akhir ini.
9) Titan, Dandi, dan Yosa yang telah bersama-sama berjuang dalam mengerjakan dan menyelesaikan tugas akhir ini.
10) Yesica, Priscill, Kezia yang telah memberikan semangat dan mau mendengarkan keluh kesah penulis selama ini.
xi
11) Semua teman yang sudah memberikan dukungannya selama penulisan tugas akhir ini, khususnya untuk pacar saya, kelompok pencacah benda, keluarga cemara, kelompok satu bimbingan, teman-teman Teknik Elektro 2017, teman-teman dampok insadha, dan teman-teman lainnya yang tidak bisa saya sebutkan satu per satu.
12) Seluruh staf dan karyawan Universitas Sanata Dharma yang telah memberikan pelayanan kepada mahasiswa.
13) Seluruh pihak yang tidak dapat disebutkan satu persatu yang membantu dalam penulisan tugas akhir ini.
Penulis menyadari bahwa penulisan tugas akhir ini masih terdapat banyak kekurangan. Oleh karena itu, penulis mengharapkan adanya kritik dan saran yang bersifat membangun dan menyempurnakan tugas akhir ini. Penulis berharap tugas akhir ini dapat bermanfaat untuk penelitian selanjutnya terkait dengan topik yang diambil oleh penulis. Terima kasih.
Yogyakarta, 27 Agustus 2021
Yuventius Yosian Vicko Prananda
DAFTAR ISI
HALAMAN SAMPUL (BAHASA INDONESIA) ... i
HALAMAN SAMPUL (BAHASA INGGRIS) ... ii
HALAMAN PERSETUJUAN ... iii
HALAMAN PENGESAHAN ... iv
PERNYATAAN KEASLIAN KARYA ... v
HALAMAN PERSEMBAHAN DAN MOTTO HIDUP ... vi
HALAMAN PERNYATAAN PERSETUJUAN PUBLIKASI KARYA ILMIAH ... vii
INTISARI ... viii
ABSTRACT ... ix
KATA PENGANTAR ... x
DAFTAR ISI ... xii
DAFTAR GAMBAR ... xv
DAFTAR TABEL ... xvii
BAB I PENDAHULUAN ... 1
1.1. Latar Belakang ... 1
1.2. Tujuan dan Manfaat ... 2
1.3. Batasan Masalah ... 2
1.4. Metodologi Penelitian ... 3
BAB II DASAR TEORI ... 4
2.1. Computer Vision ... 4
2.1.1. Pengolahan Citra ... 4
2.1.2. Citra Grayscale ... 4
2.1.3. Citra Biner ... 5
2.1.4. Konversi Citra Grayscale ke Citra Biner ... 5
2.1.5. Pengenalan Bentuk ... 6
xiii
2.1.6. Pengenalan Ukuran ... 7
2.1.7. Pengenalan Kode Angka ... 8
2.2. Webcam Logitech C270 ... 8
2.3. Python ... 9
2.3.1. OpenCV ... 9
2.3.2. Scikit-Image ... 9
BAB III PERANCANGAN PENELITIAN ... 10
3.1. Proses Pencacah Benda Berdasarkan Bentuk, Ukuran, dan Kode Angka ... 10
3.2. Proses Kerja Sistem ... 11
3.2.1. Pengambilan Citra benda 2D ... 12
3.2.2. Pengenalan Bentuk ... 13
3.2.3. Pengenalan Ukuran ... 15
3.2.4. Pengenalan Kode Angka ... 16
3.2.5. Pengisian Tabel Pada GUI Python ... 19
3.3. Perancangan Tampilan GUI Python ... 27
BAB IV HASIL DAN PEMBAHASAN ... 28
4.1. Perubahan ... 28
4.2.1. Diagram Alir Penghapusan Kode Angka ... 28
4.2.2. Diagram Alir Pengenalan Kode Angka ... 29
4.1.3. Perubahan Ukuran Benda ... 30
4.2. Penentuan Parameter ... 33
4.2.1. Parameter Bentuk ... 33
4.2.2. Parameter Ukuran ... 34
4.2.3. Parameter Kode Angka ... 35
4.3. Perbandingan Teori Dengan Praktik ... 37
4.2.1. Pengenalan Bentuk ... 37
4.2.2. Pengenalan Ukuran ... 40
4.2.3. Pengenalan Kode Angka ... 43
4.4. Kinerja Sistem ... 45
4.2.1. Pengujian Keberhasilan Pencacah Benda ... 45
4.4.2. Pengujian Pengaruh Rotasi ... 56
BAB V KESIMPULAN DAN SARAN ... 63
5.1. Kesimpulan ... 63
5.2. Saran ... 63
DAFTAR PUSTAKA ... 64 LAMPIRAN 1 ... L-1
xv
DAFTAR GAMBAR
Gambar 2.1. Citra Grayscale ... 4
Gambar 2.2. Citra Biner ... 5
Gambar 2.3. Perubahan dari Citra Grayscale ke Citra Biner ... 6
Gambar 2.4. Ilustrasi perubahan nilai piksel pada proses thresholding ... 6
Gambar 2.5. Hasil dari Pengenalan Bentuk ... 7
Gambar 2.6. Hasil dari Pengenalan Ukuran ... 8
Gambar 2.7. Webcam Logitech C270 ... 9
Gambar 3.1. Perancangan Alat ... 10
Gambar 3.2. Diagram Alir Proses Kerja Sistem ... 11
Gambar 3.3. Diagram Alir Pengambilan Citra Benda ... 12
Gambar 3.4. Diagram Alir Pengenalan Bentuk ... 13
Gambar 3.5. Diagram Alir Pengenalan Ukuran ... 15
Gambar 3.6. Diagram Alir Pengenalan Kode Angka ... 17
Gambar 3.7. Diagram Alir Pengisian Tabel GUI ... 19
Gambar 3.8. Tampilan GUI Python ... 27
Gambar 4.1. Diagram Alir Penghapusan Kode Angka ... 28
Gambar 4.2. Diagram Alir Kode Angka... 29
Gambar 4.3. Segitiga Ukuran 12 cm ... 31
Gambar 4.4. Segitiga Ukuran 10 cm ... 31
Gambar 4.5. Persegi Ukuran 12 cm ... 31
Gambar 4.6. Persegi Ukuran 10 cm ... 32
Gambar 4.7. Bundar Ukuran 12 cm ... 32
Gambar 4.8. Bundar Ukuran 10 cm ... 32
Gambar 4.9. List Program Pengenalan Bentuk ... 34
Gambar 4.10. List Program Pengenalan Ukuran ... 35
Gambar 4.11. List Program Pengenalan Kode Angka ... 36
Gambar 4.12. Konversi Nilai Piksel Pengenalan Bentuk ... 40
Gambar 4.13. Konversi Nilai Piksel Pengenalan Ukuran ... 43
Gambar 4.14. Konversi Nilai Piksel Pengenalan Kode Angka ... 44
Gambar 4.15. Posisi Peletakan Benda ... 45
Gambar 4.16. Pengujian 1 Benda ... 51
Gambar 4.17. Pengujian 2 Benda ... 51
Gambar 4.18. Pengujian 3 Benda ... 52
Gambar 4.19. Pengujian 2 Benda dengan Jarak 0 cm ... 52
Gambar 4.20. Pengujian 2 Benda dengan Jarak 0,5 cm ... 52
Gambar 4.21. Pengujian 2 Benda dengan Jarak 1 cm ... 53
Gambar 4.22. Pengujian 3 Benda dengan Jarak 0 cm ... 53
Gambar 4.23. Pengujian 3 Benda dengan Jarak 0,5 cm ... 53
Gambar 4.24. Pengujian 3 Benda dengan Jarak 1 cm ... 54
Gambar 4.25. Pengujian 2 Benda Berukuran Besar dengan Jarak 0 cm ... 54
Gambar 4.26. Pengujian 2 Benda Berukuran Besar dengan Jarak 1 cm ... 54
Gambar 4.27. Percobaan dengan Benda Berwarna ... 55
Gambar 4.28. Hasil Pengenalan Benda Berwarna ... 55
Gambar 4.29. Lux Light Meter ... 56
Gambar 4.30. Pengujian Benda dengan Rotasi 0 ̊ ... 60
Gambar 4.31. Pengujian Benda dengan Rotasi 30 ̊ ... 60
Gambar 4.32. Pengujian Benda dengan Rotasi 60 ̊ ... 60
Gambar 4.33. Pengujian Benda dengan Rotasi 90 ̊ ... 61
Gambar 4.34. Pengujian Benda dengan Rotasi 90 ̊ ... 61
Gambar 4.35. Pengujian Benda dengan Rotasi 30 ̊ ... 61
xvii
DAFTAR TABEL
Tabel 3.1. Keterangan Tampilan GUI Python ... 27
Tabel 4.1. Ukuran Benda Sebelum Perubahan ... 30
Tabel 4.2. Ukuran Benda Setelah Perubahan ... 30
Tabel 4.3. Tabel Perbandingan Bentuk ... 40
Tabel 4.4. Tabel Perbandingan Ukuran ... 42
Tabel 4.5. Tabel Perbandingan Kode Angka ... 44
Tabel 4.6. Pengujian Dengan 1 Benda ... 46
Tabel 4.7. Pengujian Dengan 2 Benda ... 47
Tabel 4.8. Pengujian Dengan 3 Benda ... 49
Tabel 4.9. Nilai Extent Circle ... 57
Tabel 4.10. Nilai Keliling ... 58
Tabel 4.11. Nilai Luas ... 59 Tabel L-1. Perbedaan Metode 1 ... L-1 Tabel L-2. Perbedaan Metode 2 ... L-2 Tabel L-3. Perhitungan Nilai Extent Circle ... L-4 Tabel L-4. Perhitungan Nilai Keliling ... L-5 Tabel L-5. Perhitungan Nilai Luas ... L-6
BAB I
PENDAHULUAN
1.1. Latar Belakang
Perkembangan teknologi saat ini begitu pesat, terutama dalam bidang image processing yang memberi kemungkinan manusia dalam membuat sistem yang mampu mengenali citra digital [1]. Image processing adalah teknik mengolah citra yang mentranformasikan citra masukan menjadi citra lain agar keluaran memiliki kualitas lebih baik [1]. Image processing merupakan salah satu bagian dari computer vision yang bertujuan mengenali dan menganalisis benda di sekitarnya pada komputer. Penggunaan image processing mempermudah manusia dalam mengetahui jenis suatu benda di antaranya bentuk, ukuran, dan kode angka. Saat ini masih ada pekerjaan manusia yang dilakukan secara manual, oleh karena itu diperlukan suatu alat yang dapat mengelompokkan dan mendeteksi bentuk, ukuran, dan kode angka pada suatu benda.
Sebelumnya pernah ada skripsi tentang sistem pengenalan benda berdasarkan bentuk dan warna dilakukan oleh Yogi [1]. Peletakan posisi benda secara acak dengan warna yang terdiri dari merah, hijau, biru dan bentuk yang terdiri dari persegi, segitiga, dan bundar dengan menggunakan bahasa pemrograman matlab. Pengenalan benda berdasarkan warna dan ukuran dilakukan oleh Hila [2]. Peletakan posisi benda secara acak dengan warna yang terdiri dari merah, hijau, biru dan ukuran yang terdiri dari besar, sedang, dan kecil dengan menggunakan bahasa pemrograman matlab yang akan ditampilkan di LCD berukuran 16x4 yang akan dibantu Arduino Uno sebagai pengirim data.
Dari penelitian tersebut, maka penulis memiliki gagasan untuk membuat suatu sistem yang dapat mencacah benda berdasarkan bentuk, ukuran, dan kode angka menggunakan bahasa pemrograman python. Bentuk terdapat tiga objek 2D yang dideteksi berdasarkan extent circle untuk segitiga, persegi, bundar. Ukuran terdapat tiga jenis yang dideteksi, yaitu berdasarkan keliling untuk kecil, sedang, besar. Kode angka dideteksi berdasarkan luas untuk kode 1, 2, dan 3.
1.2. Tujuan dan Manfaat
Tujuan dari penelitian ini adalah :
1. Menghasilkan suatu sistem pencacah benda berdasarkan bentuk, ukuran, dan kode angka menggunakan bahasa pemrograman python.
Manfaat dari penelitian ini adalah :
1. Sebagai media pembelajaran mengenai computer vision untuk pencacah benda berdasarkan bentuk, ukuran, dan kode angka.
1.3. Batasan Masalah
Dalam pengerjaan sistem ini, penulis fokus pada pembuatan perangkat lunak komputer sebagai pencacah benda berdasarkan bentuk, ukuran, dan kode angka. Penulis menetapkan beberapa batasan masalah dalam perancangan ini, yaitu:
1. Masukan berupa tiga buah benda 2D yaitu; segitiga, persegi, dan bundar.
2. Benda 2D berwarna putih.
3. Menggunakan metode extent circle untuk pengenalan bentuk benda. (Terjadi perubahan metode. Perubahan metode ditunjukkan pada Lampiran 1 Tabel L-1 dan L-2).
4. Jika terdapat benda berwarna maka terdeteksi menjadi grayscale.
5. Menggunakan metode keliling untuk menentukan ukuran benda kecil, sedang, besar.
6. Ukuran benda segitiga dengan panjang sisi : Kecil = 4 cm, Sedang = 8 cm, Besar = 12 cm. Ukuran benda persegi dengan panjang sisi : Kecil = 4 cm, Sedang = 8 cm, Besar = 12 cm. Ukuran benda bundar dengan diameter : Kecil = 4 cm, Sedang = 8 cm, Besar = 12 cm. (Terjadi perubahan ukuran benda. Perubahan ukuran benda ditunjukkan pada Sub Bab 4.1.3.).
7. Jika terdapat benda segitiga, persegi, bundar yang berukuran lebih dari 12 cm maka dianggap berukuran besar. Jika terdapat benda segitiga, persegi, bundar yang berukuran kurang dari 4 cm maka dianggap berukuran kecil.
8. Kode angka berbentuk bundar, berwarna hitam pada setiap benda.
9. Jari-jari kode angka : 0,5 cm.
10. Menggunakan metode luas untuk pengenalan kode angka 1, 2, 3.
11. Menggunakan kotak berwarna hitam sebagai tempat peletakan benda dengan lebar 30cm, tinggi 30cm.
12. Warna background yang digunakan warna hitam.
13. Pengambilan citra benda menggunakan webcam.
14. Peletakan benda bebas, sejauh tidak bersentuhan.
15. Pemrograman dan tampilan GUI menggunakan bahasa pemrograman python.
16. Hasil pencacahan berupa tabel di layar monitor.
1.4. Metodologi Penelitian
Dari tujuan yang ingin dicapai di atas, langkah-langkah dalam penyusunan tugas akhir ini yaitu:
1. Studi Pustaka, yaitu mengenai pemakaian webcam untuk image processing pada python, pemrosesan citra, pengolahan citra grayscale, pengolahan citra biner, pengumpulan bahan-bahan berupa e-book dan jurnal ilmiah yang membahas mengenai computer vision, website mengenai pengenalan suatu benda, pemrograman python, serta berbagai buku yang dapat membantu lainnya.
2. Perancangan hardware dan software, mempunyai tujuan untuk merancang bentuk model dari sistem yang telah dibuat dengan cara mempertimbangankan faktor permasalahan yang telah ditentukan sebelumnya.
3. Pembuatan hardware dan software, mengenai pembuatan hardware yaitu pembuatan tempat untuk meletakkan suatu benda dan posisi tiang penyangga webcam dengan ukuran yang telah ditentukan. Sedangkan, software adalah pembuatan program GUI menggunakan python untuk pengolahan citra benda, menggunakan webcam Logitech seri C270 sebagai pengidentifikasi bentuk, ukuran, serta kode angka benda.
4. Proses pengambilan data, pengambilan data pada teknik ini dilakukan dengan mengambil tingkat pengenalan dari masing-masing benda, ukuran, dan kode angka.
Data diambil sebanyak 100 kali percobaan dengan varian jumlah benda, rotasi, dan translasi. Pada percobaan dengan varian jumlah benda penulis menentukan pengambilan data dengan 1 benda sebanyak 27 kali, 2 benda sebanyak 40 kali, dan 3 benda sebanyak 33 kali dengan varian translasi 9 posisi dan varian rotasi 0 ̊, 30 ̊, 60 ̊, dan 90 ̊.
5. Analisis dan penyimpulan hasil percobaan, langkah ini dilakukan dengan cara melihat tingkat pengenalan ketika mengidentifikasi bentuk, ukuran, dan kode angka benda.
4
BAB II
DASAR TEORI
2.1. Computer Vision
Computer vision merupakan ilmu yang menggunakan image processing untuk membuat keputusan berdasarkan citra yang didapat dari sensor atau kamera [3]. Computer vision mencoba meniru cara kerja sistem visual manusia yang sesungguhnya sangat kompleks. Oleh sebab itu, computer vision diharapkan memiliki kemampuan tingkat tinggi sebagaimana human visual.
2.1.1. Pengolahan Citra
Pengolahan citra merupakan salah satu jenis pemrosesan citra, khususnya dengan menggunakan komputer untuk mengubahnya menjadi citra yang lebih berkualitas.
Pengolahan citra bertujuan untuk meningkatkan kualitas citra sehingga dapat dengan mudah diinterpretasikan oleh manusia atau mesin (dalam hal ini komputer). Teknologi pemrosesan citra mengubah citra menjadi gambar citra. Oleh sebab itu, yang dimasukkan adalah citra dan keluarannya juga berupa citra yang kualitasnya lebih baik daripada citra masukan [4].
2.1.2. Citra Grayscale
Citra grayscale adalah citra yang nilai pikselnya merepresentasikan derajat keabuan.
Nilai intensitas paling rendah adalah merepresentasikan warna hitam dan nilai intensitas paling tinggi merepresentasikan warna putih. Banyaknya warna pada jenis citra grayscale bergantung pada jumlah bit yang disediakan oleh memori untuk menampung [5]. Contoh hasil citra grayscale ditunjukkan pada Gambar 2.1.
Gambar 2.1. Citra Grayscale
2.1.3. Citra Biner
Citra biner adalah citra yang memiliki dua nilai tingkat keabuan yaitu hitam dan putih.
Citra biner merupakan piksel yang mempunyai dua kemungkinan nilai yaitu 0 dan 1. Warna hitam dengan nilai 0 dan warna putih dinyatakan dengan nilai 1. Citra ini disebut dengan citra B&W (black and white) atau citra monokrom. Citra ini biasanya digunakan untuk memperoleh tepi bentuk suatu benda [6]. Contoh hasil citra biner ditunjukkan pada Gambar 2.2.
2.1.4. Konversi Citra Grayscale ke Citra Biner
Konversi citra grayscale menjadi citra biner dilakukan untuk mengidentifikasi keberadaan benda. Misalnya memisahkan segmentasi benda dari gambar dengan latar belakangnya. Proses ini peneliti menggunakan metode threshold. Proses threshold biasa disebut proses binarisasi. Sehingga citra keluaran dari hasil thresholding adalah berupa citra biner [7]. Untuk mencari nilai fungsi konversi citra grayscale ke citra biner dengan menggunakan rumus pada Persamaan 2.1.
𝐼𝐵𝑖𝑛 (𝑥, 𝑦) = {0
1 𝐼𝐵𝑊 (𝑥, 𝑦) < 𝑇 𝐼𝐵𝑊 (𝑥, 𝑦) ≥ 𝑇
Keterangan:
𝐼𝐵𝑊 (𝑥, 𝑦) = Nilai piksel gray titik (𝑥, 𝑦) 𝐼𝐵𝑖𝑛 (𝑥, 𝑦) = Nilai piksel binary titik (𝑥, 𝑦) 𝑇 = Nilai threshold
(2.1) Gambar 2.2. Citra Biner
Gambar 2.3. Perubahan dari Citra Grayscale ke Citra Biner
Contoh perubahan nilai piksel pada proses thresholding ditunjukkan pada Gambar 2.3.
2.1.5. Pengenalan Bentuk
Pada tahap pengenalan bentuk, peneliti menggunakan metode extent circle. Metode extent circle merupakan fitur yang memungkinkan untuk melingkupi area kontur suatu objek di dalam sebuah lingkaran. Untuk mencari nilai extent circle ditunjukkan pada Persamaan 2.2, untuk mencari nilai extent circle bentuk segitiga ditunjukkan pada Persamaan 2.3, untuk mencari nilai extent circle bentuk persegi ditunjukkan pada Persamaan 2.4, untuk mencari nilai extent circle bentuk bundar ditunjukkan pada Persamaan 2.5.
R = 𝐿𝑢𝑎𝑠 𝑏𝑒𝑛𝑑𝑎
𝐿𝑢𝑎𝑠 𝑚𝑖𝑛𝑖𝑚𝑢𝑚 𝑒𝑛𝑐𝑙𝑜𝑠𝑖𝑛𝑔 𝑐𝑖𝑟𝑐𝑙𝑒
𝑅1 =
𝑎 𝑥 𝑡 2 2 𝜋 𝑟2
𝑅2 = 𝑠 𝑥 𝑠
2 𝜋 𝑟2
𝑅3 = 2 𝜋 𝑟
2 2 𝜋 𝑟2
(2.2) Gambar 2.4. Ilustrasi perubahan nilai piksel pada proses thresholding
(2.3)
(2.4)
(2.5)
Keterangan : 𝑅 = Nilai 𝐸𝑥𝑡𝑒𝑛𝑡 𝐶𝑖𝑟𝑐𝑙𝑒 Benda
𝑅1 = Nilai 𝐸𝑥𝑡𝑒𝑛𝑡 𝐶𝑖𝑟𝑐𝑙𝑒 Bentuk Segitiga
𝑅2 = Nilai 𝐸𝑥𝑡𝑒𝑛𝑡 𝐶𝑖𝑟𝑐𝑙𝑒 Bentuk Persegi 𝑅3 = Nilai 𝐸𝑥𝑡𝑒𝑛𝑡 𝐶𝑖𝑟𝑐𝑙𝑒 Bentuk Bundar 𝑎 = Alas
𝑡 = Tinggi 𝑠 = Sisi
𝑟 = Jari-jari lingkaran
2.1.6. Pengenalan Ukuran
Pada tahap pengenalan ukuran, peneliti mencari nilai perimeter atau keliling dari citra benda. Perimeter atau keliling menyatakan panjang tepi suatu objek. Perimeter didapatkan dari hasil deteksi tepi suatu benda dalam citra digital. Jumlah piksel perimeter dari setiap benda berbeda-beda. Jumlah piksel tersebut dihitung berdasarkan piksel pada tepi suatu benda. Untuk mencari nilai keliling dari objek dengan menggunakan rumus pada Persamaan 2.6, 2.7, 2.8. Pada setiap persamaan dapat mewakili hasil pengenalan ukuran kecil, sedang, besar.
Segitiga : K = s + s + s Persegi : K = 4 x s Lingkaran : K = π x d
(2.6) Gambar 2.5. Hasil dari Pengenalan Bentuk
(2.7) (2.8)
Keterangan: K = Keliling benda d = Diameter s = Sisi
2.1.7. Pengenalan Kode Angka
Pada tahap pengenalan kode angka, peneliti mencari nilai area (luas) dari citra benda kode angka. Area merupakan jumlah piksel penyusun pada suatu objek. Benda pada citra biner direpresentasikan dengan warna putih. Nilai piksel citra berwarna putih pada area tersebut bernilai 1. Jumlah piksel (yang bernilai 1) pada suatu benda dalam citra digital adalah nilai areanya. Untuk mencari nilai area dengan menggunakan rumus pada Persamaan 2.9.
2.2. Webcam Logitech C270
Web camera (webcam) merupakan perangkat yang berupa sebuah kamera digital yang dihubungkan ke komputer melalui port USB. Layaknya kamera pada umumnya, sebuah webcam dapat mengirimkan gambar-gambar secara langsung [8].Gambar yang diambil oleh webcam ditampilkan ke layar monitor, karena dikendalikan oleh komputer, maka ada interface atau port yang digunakan untuk menghubungkan webcam dengan komputer
.
(2.9) L = 𝑛(𝜋𝑟2)
Keterangan:
L = Luas
n = Jumlah kode angka r = Jari-jari
Gambar 2.6. Hasil dari Pengenalan Ukuran
2.3. Python
Python adalah bahasa pemrograman tinggi yang sering digunakan pada dunia perteknikan. Python merupakan salah satu bahasa pemrograman yang dapat melakukan eksekusi sejumlah instruksi multiguna secara langsung dengan metode orientasi objek [9].
2.3.1. OpenCV
OpenCV (Open Computer Vision) adalah sebuah library open source yang dikembangkan oleh intel yang fokus untuk menyederhanakan programing terkait citra digital. OpenCV merupakan open source computer vision library untuk bahasa pemrograman C/C++ dan telah dikembangkan ke python, java, matlab. Keistimewaaan yang di miliki OpenCV adalah pemrosesan citra, pengenalan objek, dan pelabelan citra [10].
2.3.2. Scikit-Image
Scikit-image adalah suatu pemrosesan citra yang mengimplementasikan algoritme dan utilitas untuk digunakan dalam suatu penelitian, pendidikan, dan aplikasi industri. Scikit- image memiliki standar pengkodean. Scikit-image merepresentasikan gambar sebagai array NumPy untuk penyimpanan data multidimensi dalam python [11].
Gambar 2.7. Webcam Logitech C270
10
BAB III
PERANCANGAN PENELITIAN
3.1. Proses Pencacah Benda Berdasarkan Bentuk, Ukuran, dan Kode Angka
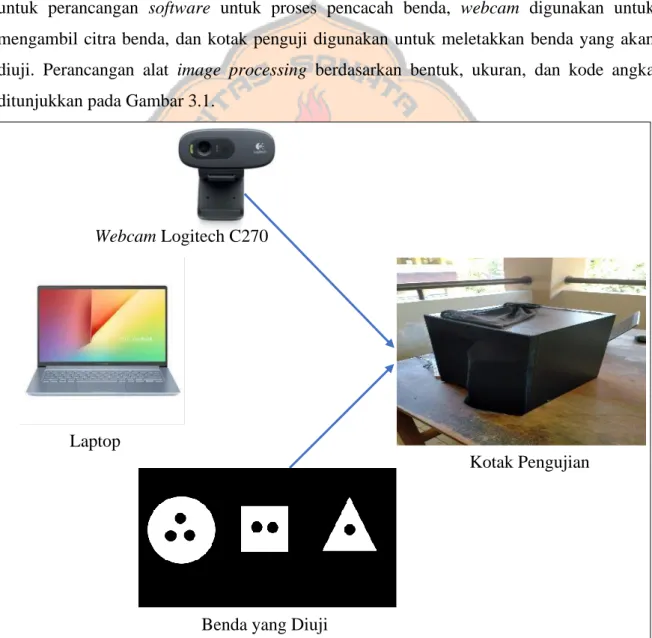
Proses mencacah benda berdasarkan bentuk, ukuran, dan kode angka meliputi beberapa proses, yaitu pengambilan citra dan klasifikasi bentuk, ukuran, dan kode angka. Alat yang digunakan untuk penelitian adalah laptop, webcam, dan kotak penguji. Laptop digunakan untuk perancangan software untuk proses pencacah benda, webcam digunakan untuk mengambil citra benda, dan kotak penguji digunakan untuk meletakkan benda yang akan diuji. Perancangan alat image processing berdasarkan bentuk, ukuran, dan kode angka ditunjukkan pada Gambar 3.1.
3.2.1
Kotak Pengujian Webcam Logitech C270
Laptop
Benda yang Diuji
Gambar 3.1. Perancangan Alat
3.2. Proses Kerja Sistem
Proses sebelum menampilkan teks dalam hasil keluaran, peneliti harus melalui beberapa tahap. Proses awal pengenalan benda 2D dengan pengambilan citra benda dilakukan menggunakan webcam, yang dapat mengambil citra grayscale. Tahap berikutnya yaitu tahap pengenalan bentuk, ukuran, dan kode angka. Diagram alir proses kerja sistem ditunjukkan pada Gambar 3.2.
Mulai
Mulai
Input:
Masukan benda 2D berbentuk segitiga, persegi, dan bundar
Input:
Masukan benda 2D berbentuk segitiga, persegi, dan bundar Pengenalan Bentuk
Pengenalan Bentuk
Output:
Hasil Pengenalan
Output:
Hasil Pengenalan Selesai
Gambar 3.3. Diagram Alir Pengambilan Citra
Benda 2D
Pengambilan Citra Benda 2D
Pengenalan Ukuran
Pengenalan Ukuran Pengenalan Kode
Angka
Pengenalan Kode Angka
Gambar 3.2. Diagram Alir Proses Kerja Sistem
3.2.1. Pengambilan Citra benda 2D
Proses pengambilan citra benda adalah proses awal dalam sistem pencacahan benda berdasarkan bentuk, ukuran, dan kode angka. Pada proses ini citra diambil dengan webcam, setelah proses ini dilanjutkan ke proses pemrograman python. Proses diawali dengan menghidupkan webcam setelah itu mengambil citra benda. Diagram alir pengambilan citra benda 2D ditunjukkan pada Gambar 3.3.
Mulai
Gambar 3.4. Diagram Alir Pengambilan Citra
BendaMulai Camera On
Capture
Output:
Citra Grayscale
Output:
Citra Grayscale Selesai
Selesai
Gambar 3.3. Diagram Alir Pengambilan Citra Benda
3.2.2. Pengenalan Bentuk
Tahap ini merupakan proses pengenalan bentuk. Proses pengenalan bentuk benda yang dilakukan adalah mencari nilai extent circle dari citra benda. Proses ini ada tiga bentuk yang akan dideteksi, yaitu segitiga, persegi, dan bundar. Proses ini akan diulangi terus menerus hingga jumlah objek output sama dengan jumlah objek input. Penulis pada proses pengenalan bentuk menggunakan beberapa variabel, yaitu k merupakan indeks benda pertama dalam pemrograman python, R merupakan variabel nilai extent circle, F1 merupakan nilai batas untuk pengenalan bentuk segitiga, F2 merupakan nilai batas untuk pengenalan bentuk persegi, T merupakan variabel untuk array bentuk segitiga, I merupakan variabel untuk array bentuk persegi, dan C merupakan variabel untuk array bentuk bundar.
Diagram alir pengenalan bentuk ditunjukkan pada Gambar 3.4.
Mulai
Mulai Input:
Citra Grayscale
Input:
Citra Grayscale Konversi Citra Grayscale ke Citra Biner
Konversi Citra Grayscale ke Citra Biner
R = Extend Circle Benda [k]
R = Extend Circle Benda [k]
k = 0
k = 0
A
A
B
B
Menghilangkan Objek Kode Angka
Menghilangkan Objek Kode Angka
Gambar 3.4. Diagram Alir Pengenalan Bentuk
Output:
Array Bentuk
Output:
Array Bentuk
Selesai
Selesai
Gambar 3.4. (Lanjutan) Diagram Alir Pengenalan Bentuk
Gambar 3.4. (Lanjutan) Diagram Alir Pengenalan Bentuk R < F1
R < F1
k = k + 1
k = k + 1
Bentuk [k] = C
Bentuk [k] = C Bentuk [k] = I
Bentuk [k] = I Tidak
Tidak
Tidak
Tidak Ya
Ya Ya
Ya
R < F2
R < F2
K = Jumlah Benda - 1
K = Jumlah Benda - 1 Bentuk [k] = T
Bentuk [k] = T
B
B
Tidak
Tidak
Ya
Ya A
3.2.3. Pengenalan Ukuran
Tahap ini merupakan proses pengenalan ukuran. Proses pengenalan ukuran yang dilakukan adalah dengan mencari nilai keliling dari citra benda. Proses pengenalan ukuran dibagi menjadi tiga jenis ukuran, yaitu kecil, sedang, besar. Proses ini akan diulangi terus menerus hingga jumlah objek output sama dengan jumlah objek input. Penulis pada proses pengenalan ukuran menggunakan beberapa variabel, yaitu k merupakan indeks benda pertama dalam pemrograman python, P merupakan variabel nilai keliling benda, U1 merupakan nilai batas untuk pengenalan ukuran kecil, U2 merupakan nilai batas untuk pengenalan ukuran sedang, K merupakan variabel untuk array ukuran kecil, S merupakan variabel untuk array ukuran sedang, dan B merupakan variabel untuk array ukuran besar.
Diagram alir pengenalan ukuran ditunjukkan pada Gambar 3.5.
Mulai
Mulai Input:
Citra Biner
Input:
Citra Biner k = 0
k = 0
Menghilangkan Objek Kode Angka
Menghilangkan Objek Kode Angka P = Keliling Benda [k]
P = Keliling Benda [k]
D
D
E
Ga m ba r
Gambar 3.5. Diagram Alir Pengenalan Ukuran
3.2.4. Pengenalan Kode Angka
Tahap ini merupakan proses pengenalan kode angka. Proses pengenalan kode angka yang dilakukan adalah dengan mencari nilai luas dari citra benda untuk kode angka. Proses ini akan diulangi terus menerus hingga jumlah objek output sama dengan jumlah objek input.
Penulis pada proses pengenalan kode angka menggunakan beberapa variabel, yaitu k merupakan indeks benda pertama dalam pemrograman python, A merupakan variabel nilai luas benda untuk kode angka, dan L merupakan variabel nilai batas suatu kode angka.
Diagram alir pengenalan kode angka ditunjukkan pada Gambar 3.6.
Output:
Array Ukuran
Output:
Array Ukuran Selesai
Selesai P < U1
P < U1
P < U2
P < U2
Ukuran [k] = B
Ukuran [k] = B Ukuran [k] = S
Ukuran [k] = S Ukuran [k] = K
Ukuran [k] = K
Ya
Ya Ya
Ya
Tidak
Tidak Tidak
Tidak
k = k + 1
k = k + 1
k = Jumlah Benda- 1
k = Jumlah Benda- 1
Ya
Ya Tidak
Tidak E
E
Gambar 3.5. (Lanjutan) Diagram Alir Pengenalan Ukuran
Gambar 3.5. (Lanjutan) Diagram Alir Pengenalan Ukuran D
Mulai
Gambar 3.6.
Diagram Alir Pengenalan Kode
AngkaMulai Input:
Citra Biner
Input:
Citra Biner A = Luas Benda [k]
A = Luas Benda [k]
A < L1
A < L1
A < L2
A < L2
A < L3
A < L3
A < L4
A < L4
Kode [k] = 1
Kode [k] = 1
Kode [k] = 1
Kode [k] = 1 Kode [k] = 3
Kode [k] = 3 Kode [k] = 2
Kode [k] = 2
F
F
G
G Ya
Ya
Ya
Ya Ya
Ya Ya
Ya
Tidak
Tidak Tidak
Tidak Tidak
Tidak Tidak
Tidak k = 0
k = 0
H
H
Gambar 3.6. Diagram Alir Pengenalan Kode Angka
Output:
Array Kode Angka
Output:
Array Kode Angka Selesai
Selesai A < L7
A < L7 A < L5
A < L5
A < L6
A < L6 F
F
G
G
A < L8
A < L8
Kode [k] = 2
Kode [k] = 2
Kode [k] = 1
Kode [k] = 1 Kode [k] = 3
Kode [k] = 3
Kode [k] = 2
Kode [k] = 2 Kode [k] = 3
Kode [k] = 3
Gambar 3.6. (Lanjutan) Diagram Alir Pengenalan Kode Angka
Gambar 3.6. (Lanjutan) Diagram Alir Pengenalan Kode Angka Tidak
Tidak
Tidak
Tidak
Tidak
Tidak
Tidak
Tidak
Ya
Ya Ya
Ya Ya
Ya Ya
Ya
k = Jumlah
Benda -1?
k = Jumlah
Benda -1?
k = k+1
k = k+1 Tidak
Tidak
Ya
Ya
H
3.2.5. Pengisian Tabel Pada GUI Python
Tahap ini merupakan pengisian tabel keluaran pencacah benda berdasarkan bentuk, ukuran, dan kode angka. Proses ini akan diulangi terus menerus hingga jumlah objek output sama dengan jumlah objek input. Penulis pada proses pengisian tabel pada GUI python menggunakan beberapa variabel, yaitu M merupakan variabel untuk array bentuk, N merupakan variabel untuk array ukuran, dan O merupakan variabel untuk array kode angka.
Proses pengisian tabel pada GUI python input berupa masing_masing array dari setiap pengenalan, lalu akan dikelompokkan menjadi satu kelompok yang berisi masing-masing kelompok tiga array dari masing-masing pengenalan. Selanjutnya output berupa jumlah pengenalan yang akan terisi pada tabel yang diberi variabel J1 sampai dengan J27. Diagram alir proses pengisian tabel pada GUI python ditunjukkan pada Gambar 3.7.
Mulai
Mulai Input:
Jumlah Benda dan Array Bentuk [M], Ukuran [N], dan Kode Angka [O]
Input:
Jumlah Benda dan Array Bentuk [M], Ukuran [N], dan Kode Angka [O]
k = 0
k = 0 {M [k] = T} &
{N [k] = K} &
{O [k] = 1}
?
{M [k] = T} &
{N [k] = K} &
{O [k] = 1}
? I
I
J1 = J1 + 1
J1 = J1 + 1
J
J Ya
Ya Tidak
Gamb ar 3.7.
Diagr am Alir Pengi sian
K
K
Gambar 3.7. Diagram Alir Pengisian Tabel GUI
Gambar 3.7. (Lanjutan) Diagram Alir Pengisian Tabel GUI Tidak
Tidak
Ya
Ya
Tidak
I J
J3 = J3 + 1 {M [k] = I} &
{N [k] = K} &
{O [k] = 1}
?
J2 = J2 + 1
{M [k] = C} &
{N [k] = K} &
{O [k] = 1}
?
{M [k] = T} &
{N [k] = K} &
{O [k] = 2}
?
J4 = J4 + 1
{M [k] = I} &
{N [k] = K} &
{O [k] = 2}
?
J5 = J5 + 1
I J
Ya Ya
Tidak
Gambar 3.7. (Lanjutan) Diagram Alir Pengisian Tabel GUI Tidak
Tidak
Ya
Ya
Tidak
I J
J7 = J7 + 1 {M [k] = C} &
{N [k] = K} &
{O [k] = 2}
?
J6 = J6 + 1
{M [k] = T} &
{N [k] = K} &
{O [k] = 3}
?
{M [k] = I} &
{N [k] = K} &
{O [k] = 3}
?
J8 = J8 + 1
{M [k] = C} &
{N [k] = K} &
{O [k] = 3}
?
J9 = J9 + 1
I J
Ya Ya
Tidak
Gambar 3.7. (Lanjutan) Diagram Alir Pengisian Tabel GUI Tidak
Tidak
Ya
Ya
Tidak
I J
J11 = J11 + 1 {M [k] = T} &
{N [k] = S} &
{O [k] = 1}
?
J10 = J10 + 1
{M [k] = I} &
{N [k] = S} &
{O [k] = 1}
?
{M [k] = C} &
{N [k] = S} &
{O [k] = 1}
?
J12 = J12 + 1
{M [k] = T} &
{N [k] = S} &
{O [k] = 2}
?
J13 = J13 + 1
I J
Ya Ya
Tidak
Gambar 3.7. (Lanjutan) Diagram Alir Pengisian Tabel GUI Tidak
Tidak
Ya
Ya
Tidak
I J
J15 = J15 + 1 {M [k] = I} &
{N [k] = S} &
{O [k] = 2}
?
J14 = J14 + 1
{M [k] = C} &
{N [k] = S} &
{O [k] = 2}
?
{M [k] = T} &
{N [k] = S} &
{O [k] = 3}
?
J16 = J16 + 1
{M [k] = I} &
{N [k] = S} &
{O [k] = 3}
?
J17 = 17 + 1
I J
Ya Ya
Tidak
Gambar 3.7. (Lanjutan) Diagram Alir Pengisian Tabel GUI Tidak
Tidak
Ya
Ya
Tidak
I J
J19 = J19 + 1 {M [k] = C} &
{N [k] = S} &
{O [k] = 3}
?
J18 = J18 + 1
{M [k] = T} &
{N [k] = B} &
{O [k] = 1}
?
{M [k] = I} &
{N [k] = B} &
{O [k] = 1}
?
J20 = J20 + 1
{M [k] = C} &
{N [k] = B} &
{O [k] = 1}
?
J21 = J21 + 1
I J
Ya Ya
Tidak
Gambar 3.7. (Lanjutan) Diagram Alir Pengisian Tabel GUI Tidak
Tidak
Ya
Ya
Tidak
I J
J23 = J23 + 1 {M [k] = T} &
{N [k] = B} &
{O [k] = 2}
?
J22 = J22 + 1
{M [k] = I} &
{N [k] = B} &
{O [k] = 2}
?
{M [k] = C} &
{N [k] = B} &
{O [k] = 2}
?
J24 = J24 + 1
{M [k] = T} &
{N [k] = B} &
{O [k] = 3}
?
J25 = J25 + 1
I J
Ya Ya
Tidak
J27 = J27 + 1
J27 = J27 + 1
k = Jumlah Benda - 1
k = Jumlah Benda - 1
Output:
Tabel Terisi
Output:
Tabel Terisi
k = k + 1
k = k + 1
Selesai
Selesai
Gambar 3.7. (Lanjutan) Diagram Alir Pengisian Tabel GUI
Gambar 3.7. (Lanjutan) Diagram Alir Pengisian Tabel GUI Ya
Ya Tidak
Tidak I
I
J
J {M [k] = I} &
{N [k] = B} &
{O [k] = 3}
?
{M [k] = I} &
{N [k] = B} &
{O [k] = 3}
?
J26 = J26 + 1
J26 = J26 + 1
Ya
Ya
Tidak
Tidak K
3.3. Perancangan Tampilan GUI Python
Perancangan interface pada sistem pencacah benda berdasarkan bentuk, ukuran, dan kode angka menggunakan GUI ( Graphical User Interface ) yang terdapat pada python dengan tujuan membantu dalam proses pencacah benda berdasarkan bentuk, ukuran, dan kode angka. Rancangan tampilan GUI dapat dilihat pada Gambar 3.8. Keterangan tampilan GUI dapat dilihat pada Tabel 3.1.
Tabel 3.1. Keterangan Tampilan GUI Python
K Segitiga Persegi Bundar
1 (J1) (J2) (J3)
2 (J4) (J5) (J6)
3 (J7) (J8) (J9)
S Segitiga Persegi Bundar
1 (J10) (J11) (J12)
2 (J13) (J14) (J15)
3 (J16) (J17) (J18)
B Segitiga Persegi Bundar
1 (J19) (J20) (J21)
2 (J22) (J23) (J24)
3 (J25) (J26) (J27)
Nama Bagian Keterangan
Text Box “K” Menunjukkan tabel untuk ukuran “Kecil”
Text Box “S” Menunjukkan tabel untuk ukuran “Sedang”
Text Box “B” Menunjukkan tabel untuk ukuran “Besar”
Text Box “1” Indikator benda kode angka “1”
Text Box “2” Indikator benda kode angka “2”
Text Box “3” Indikator benda kode angka “3”
Text Box “Segitiga” Indikator benda bentuk segitiga Text Box “Persegi” Indikator benda bentuk persegi Text Box “Bundar” Indikator benda bentuk bundar
Text Box ”Hasil Pengenalan” Menampilkan hasil pengenalan untuk input image
Tombol “Camera on” Menghidupkan kamera
Tombol “Capture” Menangkap gambar dari kamera Tombol “Proses” Memproses pengenalan input image
Tombol “Reset” Mengembalikan tampilan GUI seperti semula
Tombol “EXIT” Tombol untuk keluar dari tampilan GUI
PENCACAH BENDA BERDASARKAN BENTUK, UKURAN DAN KODE AGKA
PENCACAH BENDA BERDASARKAN BENTUK, UKURAN DAN KODE AGKA Hasil Capture
Camera On
Camera On
Capture
Capture Proses
Gambar 3.8.
Tampilan GUI PythonPros
es
Reset
Reset
Exit
Exit
Gambar 3.8. Tampilan GUI Python
28 Tidak
Ya
BAB IV
HASIL DAN PEMBAHASAN
Bab ini membahas mengenai perubahan diagram alir, perubahan ukuran benda, penentuan nilai dari setiap parameter, perbandingan hasil secara teori dan praktik, serta pengujian sistem pencacah benda berdasarkan bentuk, ukuran, dan kode angka menghasilkan data pengenalan. Penerapan sistem pencacah benda secara perangkat lunak pada Bab III. Pengujian sistem pencacah benda bertujuan untuk mengetahui sistem yang telah dirancang dapat bekerja dengan baik sesuai dengan perancangan.
4.1. Perubahan
4.2.1. Diagram Alir Penghapusan Kode Angka
Pada Gambar 4.1. ditunjukkan diagram alir penghapusan objek kode angka karena pada Gambar 3.4. masih belum dijelaskan mengenai proses penghapusan objek kode angka.
Penghapusan pengenalan kode angka bertujuan agar pada saat proses pengujian pengenalan bentuk dan ukuran pengenalan kode angka tidak terdeteksi sebagai objek bentuk dan ukuran.
Gambar 4.1. Diagram Alir Penghapusan Kode Angka Mulai
a<1000 Objek terhapus Input:
Citra Grayscale
Menghitung area objek kode angka (a)
Output:
Citra dengan kode angka dan citra tanpa kode objek Objek tidak terhapus
Selesai
Gambar 4.2. Diagram Alir Kode Angka
4.2.2. Diagram Alir Pengenalan Kode Angka
Tahap ini yaitu proses pengenalan kode angka dengan cara mencari nilai dari area atau luas kode angka. Penulis pada proses pengenalan kode angka menggunakan beberapa variabel, yaitu k merupakan indeks benda pertama dalam pemrograman python, A merupakan variabel nilai luas benda untuk kode angka, dan L merupakan variabel nilai batas suatu kode angka. Jika luas kurang dari L1, maka benda dianggap berkode 1, jika luas kurang dari L2, maka benda dianggap berkode 2, dan jika luas lebih dari L2, maka benda dianggap berkode 3. Proses ini akan dilanjutkan sampai pengujian terakhir. Diagram alir pengenalan kode angka ditunjukkan pada Gambar 4.2.
A < L1
A < L2
Kode [k]= 3 Input:
Citra Biner
Mengitung luas objek (A)
k = 0
Kode [k]= 2 Kode [k]= 1
Output: Hasil array kode k = k+1
Selesai
k =Jumlah benda-1?
Mulai
Ya Ya
Ya
Tidak Tidak
Tidak
Pada Gambar 4.2. merupakan perubahan diagram alir pengenalan kode angka yang menggantikan diagram alir pengenalan kode angka pada gambar 3.6. Perubahan diagram alir kode angka dilakukan karena adanya perubahan dari kerja program sehingga harus adanya penyesuaian agar semua proses pada program sesuai dengan output yang diharapkan.
4.1.3. Perubahan Ukuran Benda
Pada batasan masalah ukuran benda mengalami perubahan. Benda yang mengalami perubahan ukuran adalah benda berukuran sedang dan besar. Benda berukuran besar mengalami perubahan karena pada saat pengujian untuk benda tidak dapat terdeteksi dengan maksimal atau terpotong. Benda berukuran besar terpotong karena posisi peletakan webcam yang kurang tinggi. Sedangkan, untuk benda berukuran sedang mengalami perubahan karena agar setiap benda memiliki perbandingan nilai ukuran yang sama, yaitu berjarak 3 cm.
Perubahan ukuran benda ditunjukkan pada Tabel 4.1. dan 4.2.
Bentuk Ukuran Panjang Sisi/Diameter
Segitiga Kecil 4 cm
Segitiga Sedang 8 cm
Segitiga Besar 12 cm
Persegi Kecil 4 cm
Persegi Sedang 8 cm
Persegi Besar 12 cm
Bundar Kecil 4 cm
Bundar Sedang 8 cm
Bundar Besar 12 cm
Tabel 4.1. Ukuran Benda Sebelum Perubahan
Tabel 4.2. Ukuran Benda Setelah Perubahan Bentuk Ukuran Panjang
Sisi/Diameter Segitiga Kecil 4 cm Segitiga Sedang 7 cm
Segitiga Besar 10 cm
Persegi Kecil 4 cm
Persegi Sedang 7 cm
Persegi Besar 10 cm
Bundar Kecil 4 cm
Bundar Sedang 7 cm
Bundar Besar 10 cm
Gambar 4.4. Segitiga Ukuran 10 cm Gambar 4.3. Segitiga Ukuran 12 cm
Gambar 4.5. Persegi Ukuran 12 cm
Gambar 4.8. Bundar Ukuran 10 cm Gambar 4.6. Persegi Ukuran 10 cm
Gambar 4.7. Bundar Ukuran 12 cm
4.2. Penentuan Parameter
Penentuan parameter memiliki tujuan yaitu untuk mencari suatu nilai dari tiap batas pada program dari setiap pengenalan. Satuan yang digunakan dalam menentukan parameter adalah piksel (px). Pada penentuan parameter penulis sudah menentukan nilai batas-batas pada setiap pengenalan benda. Nilai yang dipakai untuk menentukan suatu parameter adalah nilai yang dihasilkan dari hasil pengujian secara praktik.
4.2.1. Parameter Bentuk
Penentuan parameter bentuk pada penelitian ini dilakukan dengan cara mencari nilai extent circle dari setiap bentuk dengan melakukan evaluasi nilai extent circle minimal dan maksimal dari setiap pengenalan bentuk dengan satuan parameternya adalah piksel. Nilai extent circle minimal dan maksimal dari setiap bentuk diperoleh dari pengujian secara praktik yang ditunjukkan pada Lampiran 1 Tabel L-3. Hasil dari nilai parameter bentuk ditetapkan sebagai nilai batas untuk pengenalan bentuk segitiga, persegi, dan bundar pada program dan akan dilakukan penghitungan sebagai berikut :
Diketahui : Extent circle max benda segitiga : 0,424 px, extent circle min benda persegi : 0,626 px, extent circle max benda persegi : 0,640 px, extent circle min benda bundar : 0,898 px.
• Penentuan Batas Bentuk Segitiga (R1):
R1 = 𝐸𝑥𝑡𝑒𝑛𝑡 𝑐𝑖𝑟𝑐𝑙𝑒 𝑚𝑎𝑥 𝑠𝑒𝑔𝑖𝑡𝑖𝑔𝑎 + 𝐸𝑥𝑡𝑒𝑛𝑡 𝑐𝑖𝑟𝑐𝑙𝑒 𝑚𝑖𝑛 𝑝𝑒𝑟𝑠𝑒𝑔𝑖 2
R1 =0,424 + 0,626 2
R1= 0,525 𝑝𝑥
Benda bentuk segitiga dapat terdeteksi apabila nilai extent circle bendanya yaitu lebih kecil dari 0,525 px.
• Penentuan Batas Bentuk Persegi (R2):
𝑅2 = 𝐸𝑥𝑡𝑒𝑛𝑡 𝑐𝑖𝑟𝑐𝑙𝑒 max 𝑝𝑒𝑟𝑠𝑒𝑔𝑖 + 𝐸𝑥𝑡𝑒𝑛𝑡 𝑐𝑖𝑟𝑐𝑙𝑒 min 𝑏𝑢𝑛𝑑𝑎𝑟 2
R2 = 0,640+0,898 2
𝑅2 = 0,769 𝑝𝑥
Gambar 4.9. List Program Pengenalan Bentuk
Benda bentuk persegi dapat terdeteksi apabila nilai extent circle bendanya yaitu lebih besar dari nilai extent circle benda bentuk segitiga dan lebih kecil dari 0,769 px.
Benda bentuk bundar dapat terdeteksi apabila nilai extent circle bendanya lebih besar dari nilai extent circle dari benda bentuk persegi, yaitu lebih dari 0,769 px.
4.2.2. Parameter Ukuran
Penentuan parameter ukuran pada penelitian ini dilakukan dengan cara mencari nilai keliling dari setiap ukuran dengan melakukan evaluasi nilai keliling minimal dan maksimal dari setiap pengenalan ukuran dengan satuan parameternya adalah piksel. Nilai keliling minimal dan maksimal dari setiap ukuran diperoleh dari pengujian secara praktik yang ditunjukkan pada Lampiran 1 Tabel L-4. Hasil dari nilai parameter ukuran ditetapkan sebagai nilai batas untuk pengenalan ukuran kecil, ukuran sedang, dan ukuran besar pada program dan akan dilakukan penghitungan sebagai berikut :
Diketahui : keliling max benda kecil : 494 px, keliling min benda sedang : 658 px, keliling max benda sedang : 916 px, keliling min benda besar : 948 px.
• Penentuan Batas Ukuran Kecil (K) :
K =𝑘𝑒𝑙𝑖𝑙𝑖𝑛𝑔 𝑚𝑎𝑥 𝑏𝑒𝑛𝑑𝑎 𝑘𝑒𝑐𝑖𝑙 + 𝑘𝑒𝑙𝑖𝑙𝑖𝑛𝑔 𝑚𝑖𝑛 𝑏𝑒𝑛𝑑𝑎 𝑠𝑒𝑑𝑎𝑛𝑔 2
K = 494 + 658
2
K = 576 𝑝𝑥
Gambar 4.10. List Program Pengenalan Ukuran
Benda berukuran kecil dapat terdeteksi apabila nilai keliling ukurannya yaitu lebih kecil dari 576 px.
• Penentuan Batas Ukuran Sedang (S):
S =𝑘𝑒𝑙𝑖𝑙𝑖𝑛𝑔 𝑚𝑎𝑥 𝑏𝑒𝑛𝑑𝑎 𝑠𝑒𝑑𝑎𝑛𝑔 + 𝑘𝑒𝑙𝑖𝑙𝑖𝑛𝑔 𝑚𝑖𝑛 𝑏𝑒𝑛𝑑𝑎 𝑏𝑒𝑠𝑎𝑟
2
S =916 + 948
2
S = 932 𝑝𝑥
Benda berukuran sedang dapat terdeteksi apabila nilai keliling ukurannya yaitu lebih besar dari nilai keliling benda berukuran kecil dan lebih kecil dari 932 px.
Benda berukuran besar dapat terdeteksi apabila nilai keliling bendanya lebih besar dari nilai keliling dari benda berukuran sedang, yaitu lebih dari 932 px.
4.2.3. Parameter Kode Angka
Penentuan parameter kode angka pada penelitian ini dilakukan dengan cara mencari nilai luas dari setiap kode angka dengan melakukan evaluasi nilai luas minimal dan maksimal dari setiap pengenalan kode angka dengan satuan parameternya adalah piksel.
Nilai luas minimal dan maksimal dari setiap kode angka diperoleh dari pengujian secara praktik yang ditunjukkan pada Lampiran 1 Tabel L-5. Hasil dari nilai parameter kode angka ditetapkan sebagai nilai untuk batas pengenalan kode 1, kode 2, dan kode 3 pada program
Gambar 4.11. List Program Pengenalan Kode Angka dan akan dilakukan penghitungan sebagai berikut :
Diketahui : luas max kode 1 : 316 piksel; luas min kode 2 : 986 piksel; luas max kode 2 : 1064 piksel; luas min kode 3 : 1091 piksel.
• Penentuan Batas Kode 1 (L1) :
L1 =𝑙𝑢𝑎𝑠 𝑚𝑎𝑥 𝑘𝑜𝑑𝑒 1 + 𝑙𝑢𝑎𝑠 𝑚𝑖𝑛 𝑘𝑜𝑑𝑒 2 2
𝐿1 =316 + 986 2 𝐿1 = 651 𝑝𝑥
Kode 1 dapat terdeteksi apabila nilai luas kodenya yaitu lebih kecil dari 651 px.
• Penentuan Batas Kode 2 (L2) :
L2 =𝑙𝑢𝑎𝑠 𝑚𝑎𝑥 𝑘𝑜𝑑𝑒 2 + 𝑙𝑢𝑎𝑠 𝑚𝑖𝑛 𝑘𝑜𝑑𝑒 3 2
𝐿2 =1064 + 1960 2 𝐿2 = 1.512 𝑝𝑥
Kode 2 dapat terdeteksi apabila nilai luas kodenya yaitu lebih besar dari nilai luas kode 1 dan lebih kecil dari 1.512 px.
Kode 3 dapat terdeteksi apabila nilai luas kodenya lebih besar dari nilai luas kode 2, yaitu lebih dari 1.512 px.
4.3. Perbandingan Teori Dengan Praktik
Perbandingan teori dan praktik dilakukan untuk mengetahui perbedaan nilai perhitungan secara teori dengan nilai perhitungan secara praktik. Menentukan perbandingan nilai yang perlu dilakukan adalah mengkonversi nilai secara praktik dengan satuan piksel menjadi satuan centimeter agar memiliki persamaan dengan nilai satuan secara teori. Nilai 1 piksel = 0,026 cm. Cara mengkonversi nilai piksel menjadi centimeter ditunjukkan pada Gambar 4.12. untuk pengenalan bentuk, Gambar 4.13. untuk pengenalan ukuran, dan Gambar 4.14. untuk pengenalan kode angka. Hasil perbandingan nilai secara teori dengan praktik ditunjukkan pada Tabel 4.3., 4.4., dan 4.5.
4.2.1. Pengenalan Bentuk
Diketahui : Panjang sisi : ukuran kecil = 4 cm, ukuran sedang = 7 cm, dan ukuran besar
= 10 cm. Jari-jari : ukuran kecil = 2 cm, ukuran sedang = 3,5 cm, dan ukuran besar = 5 cm.
𝑅1 merupakan nilai untuk pengenalan bentuk segitiga, 𝑅2 merupakan nilai untuk pengenalan bentuk persegi, dan 𝑅3 merupakan nilai untuk pengenalan bentuk bundar. 𝑟 merupakan jari- jari dari circle dan benda bundar. Nilai 𝑅1, 𝑅2, 𝑅3 didapat dari rumus extent circle yang ditunjukkan pada Sub Bab 2.1.5. pada Persamaan 2.3, 2.4, 2.5 halaman 6 hingga 7.
Perhitungan pengujian nilai extent circle pengenalan bentuk ditunjukkan pada Lampiran 1 Tabel L-3.
• Luas 𝑀𝑖𝑛𝑖𝑚𝑢𝑚 𝐸𝑛𝑐𝑙𝑜𝑠𝑖𝑛𝑔 𝐶𝑖𝑟𝑐𝑙𝑒
𝐿𝑢𝑎𝑠 𝑀𝑖𝑛𝑖𝑚𝑢𝑚 𝐸𝑛𝑐𝑙𝑜𝑠𝑖𝑛𝑔 𝐶𝑖𝑟𝑐𝑙𝑒 𝐾𝑒𝑐𝑖𝑙 = 2 𝜋 𝑟2 = 2 × 𝜋 × 22 = 25,13 𝑐𝑚2 𝐿𝑢𝑎𝑠 𝑀𝑖𝑛𝑖𝑚𝑢𝑚 𝐸𝑛𝑐𝑙𝑜𝑠𝑖𝑛𝑔 𝐶𝑖𝑟𝑐𝑙𝑒 𝑆𝑒𝑑𝑎𝑛𝑔 = 2 𝜋 𝑟2
= 2 × 𝜋 × 3,52 = 76,96 𝑐𝑚2
𝐿𝑢𝑎𝑠 𝑀𝑖𝑛𝑖𝑚𝑢𝑚 𝐸𝑛𝑐𝑙𝑜𝑠𝑖𝑛𝑔 𝐶𝑖𝑟𝑐𝑙𝑒 𝐵𝑒𝑠𝑎𝑟 = 2 𝜋 𝑟2 = 2 × 𝜋 × 52 = 157,06 𝑐𝑚2
𝑅𝑒𝑟𝑎𝑡𝑎 𝑀𝑖𝑛𝑖𝑚𝑢𝑚 𝐸𝑛𝑐𝑙𝑜𝑠𝑖𝑛𝑔 𝐶𝑖𝑟𝑐𝑙𝑒 = 25,13 + 76,96 + 157,06 3
= 86,38 𝑐𝑚2
• Bentuk Segitiga (R1)
𝐿𝑢𝑎𝑠 𝑆𝑒𝑔𝑖𝑡𝑖𝑔𝑎 𝐾𝑒𝑐𝑖𝑙 = 𝑎𝑙𝑎𝑠 × 𝑡𝑖𝑛𝑔𝑔𝑖 2 = 4 × 3,5
2 = 7 𝑐𝑚2
𝐿𝑢𝑎𝑠 𝑆𝑒𝑔𝑖𝑡𝑖𝑔𝑎 𝑆𝑒𝑑𝑎𝑛𝑔 = 𝑎𝑙𝑎𝑠 × 𝑡𝑖𝑛𝑔𝑔𝑖 2 = 7 × 6
2 = 21 𝑐𝑚2
𝐿𝑢𝑎𝑠 𝑆𝑒𝑔𝑖𝑡𝑖𝑔𝑎 𝐵𝑒𝑠𝑎𝑟 = 𝑎𝑙𝑎𝑠 × 𝑡𝑖𝑛𝑔𝑔𝑖 2 = 10 × 8,7
2 = 43,5 𝑐𝑚2
𝑅𝑒𝑟𝑎𝑡𝑎 𝐿𝑢𝑎𝑠 𝐵𝑒𝑛𝑡𝑢𝑘 𝑆𝑒𝑔𝑖𝑡𝑖𝑔𝑎 = 7 + 21 + 43.5 3 = 23,84 𝑐𝑚2
𝑅1 = 𝑅𝑒𝑟𝑎𝑡𝑎 𝐿𝑢𝑎𝑠 𝑆𝑒𝑔𝑖𝑡𝑖𝑔𝑎
𝑅𝑒𝑟𝑎𝑡𝑎 𝐿𝑢𝑎𝑠 𝑀𝑖𝑛𝑖𝑚𝑢𝑚 𝐸𝑛𝑐𝑙𝑜𝑠𝑖𝑛𝑔 𝐶𝑖𝑟𝑐𝑙𝑒 𝑅1 = 23,84
86,38 𝑅1 = 0,28
• Bentuk Persegi (R2)
𝐿𝑢𝑎𝑠 𝑃𝑒𝑟𝑠𝑒𝑔𝑖 𝐾𝑒𝑐𝑖𝑙 = 𝑠𝑖𝑠𝑖 × 𝑠𝑖𝑠𝑖 = 4 × 4 = 16 𝑐𝑚2
𝐿𝑢𝑎𝑠 𝑃𝑒𝑟𝑠𝑒𝑔𝑖 𝑆𝑒𝑑𝑎𝑛𝑔 = 𝑠𝑖𝑠𝑖 × 𝑠𝑖𝑠𝑖 = 7 × 7 = 49 𝑐𝑚2
𝐿𝑢𝑎𝑠 𝑃𝑒𝑟𝑠𝑒𝑔𝑖 𝐵𝑒𝑠𝑎𝑟 = 𝑠𝑖𝑠𝑖 × 𝑠𝑖𝑠𝑖 = 10 × 10 = 100 𝑐𝑚2
𝑅𝑒𝑟𝑎𝑡𝑎 𝐵𝑒𝑛𝑡𝑢𝑘 𝑃𝑒𝑟𝑠𝑒𝑔𝑖 = 16 + 49 + 100 3
= 55 𝑐𝑚2
𝑅2 = 𝑅𝑒𝑟𝑎𝑡𝑎 𝐿𝑢𝑎𝑠 𝑃𝑒𝑟𝑠𝑒𝑔𝑖
𝑅𝑒𝑟𝑎𝑡𝑎 𝐿𝑢𝑎𝑠 𝑀𝑖𝑛𝑖𝑚𝑢𝑚 𝐸𝑛𝑐𝑙𝑜𝑠𝑖𝑛𝑔 𝐶𝑖𝑟𝑐𝑙𝑒 𝑅2 = 55
86,38 𝑅2 = 0,63
• Bentuk Bundar (R3)
𝐿𝑢𝑎𝑠 𝐵𝑢𝑛𝑑𝑎𝑟 𝐾𝑒𝑐𝑖𝑙 = 2 𝜋 𝑟2
= 2 × 𝜋 × 22 = 25,13 𝑐𝑚2
𝐿𝑢𝑎𝑠 𝐵𝑢𝑛𝑑𝑎𝑟 𝑆𝑒𝑑𝑎𝑛𝑔 = 2 𝜋 𝑟2
= 2 × 𝜋 × 3,52 = 7,96 𝑐𝑚2
𝐿𝑢𝑎𝑠 𝐵𝑢𝑛𝑑𝑎𝑟 𝐵𝑒𝑠𝑎𝑟 = 2 𝜋 𝑟2 = 2 × 𝜋 × 52 = 157,06 𝑐𝑚2
𝑅𝑒𝑟𝑎𝑡𝑎 𝐿𝑢𝑎𝑠 𝐵𝑢𝑛𝑑𝑎𝑟 = 25,13 + 76,96 + 157,06 3
= 86,38 𝑐𝑚2
Gambar 4.12. Konversi Nilai Piksel Pengenalan Bentuk [12]
𝑅3 = 𝑅𝑒𝑟𝑎𝑡𝑎 𝐿𝑢𝑎𝑠 𝐵𝑢𝑛𝑑𝑎𝑟
𝑅𝑒𝑟𝑎𝑡𝑎 𝐿𝑢𝑎𝑠 𝑀𝑖𝑛𝑖𝑚𝑢𝑚 𝐸𝑛𝑐𝑙𝑜𝑠𝑖𝑛𝑔 𝐶𝑖𝑟𝑐𝑙𝑒 𝑅3 = 86,38
86,38 𝑅3 = 1
Tabel 4.3. Tabel Perbandingan Bentuk
4.2.2. Pengenalan Ukuran
Diketahui : 𝐾 merupakan nilai keliling benda. Panjang sisi dan diameter benda: ukuran kecil = 4 cm, ukuran sedang = 7 cm, dan ukuran besar = 10 cm. Rumus untuk mencari nilai keliling pengenalan ukuran ditunjukkan pada Sub Bab 2.1.6. pada Persamaan 2.6, 2.7, 2.8 halaman 7 hingga 8. Perhitungan pengujian nilai luas pengenalan kode angka ditunjukkan pada Lampiran 1 Tabel L-4.
Perhitungan Praktik Perhitungan Teori
Bentuk Nilai
Extent Circle Bentuk Nilai Extent Circle
Segitiga 0,011 Segitiga 0,28
Persegi 0,017 Persegi 0,63
Bundar 0,025 Bundar 1
• Ukuran Kecil
𝐾𝑒𝑙𝑖𝑙𝑖𝑛𝑔 𝑆𝑒𝑔𝑖𝑡𝑖𝑔𝑎 = 𝑠𝑖𝑠𝑖 + 𝑠𝑖𝑠𝑖 + 𝑠𝑖𝑠𝑖 = 4 + 4 + 4
= 12 cm
𝐾𝑒𝑙𝑖𝑙𝑖𝑛𝑔 𝑃𝑒𝑟𝑠𝑒𝑔𝑖 = 4 × 𝑠𝑖𝑠𝑖 = 4 × 4 = 16 cm
𝐾𝑒𝑙𝑖𝑙𝑖𝑛𝑔 𝐵𝑢𝑛𝑑𝑎𝑟 = 2 × 𝜋 × 𝑟
= 2 × 𝜋 × 2
= 12,56 cm
Ukuran Kecil = 𝐾𝑒𝑙𝑖𝑙𝑖𝑛𝑔 𝑆𝑒𝑔𝑖𝑡𝑖𝑔𝑎 + 𝐾𝑒𝑙𝑖𝑙𝑖𝑛𝑔 𝑃𝑒𝑟𝑠𝑒𝑔𝑖 + 𝐾𝑒𝑙𝑖𝑙𝑖𝑛𝑔 𝐵𝑢𝑛𝑑𝑎𝑟 3
=12 + 16 + 12,56 3
= 13,52 cm
• Ukuran Sedang
𝐾𝑒𝑙𝑖𝑙𝑖𝑛𝑔𝑆𝑒𝑔𝑖𝑡𝑖𝑔𝑎 = 𝑠𝑖𝑠𝑖 + 𝑠𝑖𝑠𝑖 + 𝑠𝑖𝑠𝑖 = 7 + 7 + 7
= 21 cm
𝐾𝑒𝑙𝑖𝑙𝑖𝑛𝑔 𝑃𝑒𝑟𝑠𝑒𝑔𝑖 = 4 × 𝑠𝑖𝑠𝑖 = 4 × 7 = 28 cm
𝐾𝑒𝑙𝑖𝑙𝑖𝑛𝑔 𝐵𝑢𝑛𝑑𝑎𝑟 = 2 × 𝜋 × 𝑟 = 2 × 𝜋 × 3,5
= 21,99 cm
Ukuran Sedang = 𝐾𝑒𝑙𝑖𝑙𝑖𝑛𝑔 𝑆𝑒𝑔𝑖𝑡𝑖𝑔𝑎 + 𝐾𝑒𝑙𝑖𝑙𝑖𝑛𝑔 𝑃𝑒𝑟𝑠𝑒𝑔𝑖 + 𝐾𝑒𝑙𝑖𝑙𝑖𝑛𝑔 𝐵𝑢𝑛𝑑𝑎𝑟 3
= 21 + 28 + 21,99 3
= 23,66 cm
• Ukuran Besar
𝐾𝑒𝑙𝑖𝑙𝑖𝑛𝑔 𝑆𝑒𝑔𝑖𝑡𝑖𝑔𝑎 = 𝑠𝑖𝑠𝑖 + 𝑠𝑖𝑠𝑖 + 𝑠𝑖𝑠𝑖 = 10 + 10 + 10 = 30 cm
𝐾𝑒𝑙𝑖𝑙𝑖𝑛𝑔 𝑃𝑒𝑟𝑠𝑒𝑔𝑖 = 4 × 𝑠𝑖𝑠𝑖 = 4 × 10 = 40 cm
𝐾𝑒𝑙𝑖𝑙𝑖𝑛𝑔 𝐵𝑢𝑛𝑑𝑎𝑟 = 2 × 𝜋 × 𝑟 = 2 × 𝜋 × 5 = 31,42 cm
Ukuran Besar = 𝐾𝑒𝑙𝑖𝑙𝑖𝑛𝑔 𝑆𝑒𝑔𝑖𝑡𝑖𝑔𝑎 + 𝐾𝑒𝑙𝑖𝑙𝑖𝑛𝑔 𝑃𝑒𝑟𝑠𝑒𝑔𝑖 + 𝐾𝑒𝑙𝑖𝑙𝑖𝑛𝑔 𝐵𝑢𝑛𝑑𝑎𝑟 3
=30 + 40 + 31,42 3
= 33,80 cm
Tabel 4.4. Tabel Perbandingan Ukuran Perhitungan Praktik Perhitungan Teori
Ukuran Nilai Keliling Ukuran Nilai Keliling
Kecil 11,22 𝑐𝑚 Kecil 13,52 𝑐𝑚
Sedang 19,54 𝑐𝑚 Sedang 23,66 𝑐𝑚
Besar 28,25 𝑐𝑚 Besar 33,80 𝑐𝑚







![Gambar 3.7. (Lanjutan) Diagram Alir Pengisian Tabel GUITidak Tidak Ya Ya Tidak I J J3 = J3 + 1 {M [k] = I} & {N [k] = K} & {O [k] = 1} ? J2 = J2 + 1 {M [k] = C} & {N [k] = K} & {O [k] = 1} ? {M [k] = T} & {N [k] = K} &](https://thumb-ap.123doks.com/thumbv2/123dok/1943423.4009555/37.892.134.630.115.1113/gambar-lanjutan-diagram-pengisian-tabel-guitidak-tidak-tidak.webp)
![Gambar 3.7. (Lanjutan) Diagram Alir Pengisian Tabel GUITidak Tidak Ya Ya Tidak I J J7 = J7 + 1 {M [k] = C} & {N [k] = K} & {O [k] = 2} ? J6 = J6 + 1 {M [k] = T} & {N [k] = K} & {O [k] = 3} ? {M [k] = I} & {N [k] = K} &](https://thumb-ap.123doks.com/thumbv2/123dok/1943423.4009555/38.892.122.634.115.1163/gambar-lanjutan-diagram-pengisian-tabel-guitidak-tidak-tidak.webp)
