TUGAS UAS ANALISIS DERET WAKTU
“MODEL STATE SPACE”
Kelompok V
Leny Yuliani (G152140421)
Riwi Diah Pangesti (G152140121)
Vitri Aprilla Handayani (G152140311)
PROGRAM STUDI STATISTIKA TERAPAN
SEKOLAH PASCASARJANA
INSTITUT PERTANIAN BOGOR
I PENDAHULUAN
Latar Belakang
Data series atau data deret waktu merupakan data yang mengGambar.kan suatu kejadian dari waktu ke waktu atau periode yang saling berkorelasi. Data deret waktu biasanya digunakan untuk melakukan analisis data dengan memertimbangkan pengaruh waktu. Analisis deret waktu terbagi menjadi dua yaitu analisis deret peubah tunggal dan analisis deret peubah ganda. Pada analisis deret peubah tunggal metode yang digunakan antara lain metode dekomposisi, pemulusan eksponensial tunggal (Single Exponential Smoothing/SES), dan ARIMA. Pada analisis deret peubah ganda metode yang digunakan antara lain model fungsi transfer, model intervensi, analisis fourier, analisis spectral, dan
Vektor Autoregresive (VAR). Sedangkan, model analisis yang dapat digunakan
untuk anaisis data deret waktu peubah tunggal dan analisis deret waktu peubah ganda adalah model state space.
Model state space merupakan suatu pendekatan yang digunakan untuk memodelkan dan memprediksi beberapa data deret waktu yang saling berhubungan secara bersamaan, dimana peubah yang ada didalamnya mempunyai interaksi yang dinamis dan untuk melihat peubah dalam data deret waktu yang tidak terobservasi (state vector). Pada penulisan makalah ini akan dibahas lebih lanjut penerapan model state space pada data deret waktu peubah ganda.
Tujuan Penulisan Makalah
Adapun tujuan dari penulisan makalah ini untuk memodelkan data deret waktu peubah ganda dan melakukan peramalan menggunakan model state space
II LANDASAN TEORI
Data Deret Waktu
Data deret waktu merupakan data yang dipengaruhi oleh periode waktu sehingga ada korelasi antar pengamatan. Data ini umumnya berisi kumpulan dari kejadian tertentu yang diperoleh dalam interval tertentu seperti dalam waktu mingguan, bulanan atau tahunan (Montgomery, et. al., 1990).
Data Stasioner
Pemodelan data deret waktu X1, X2, ..., Xtdidasarkan pada syarat asumsi bahwa data deret waktu harus stasioner. Secara teoritis dapat dituliskan sebagai berikut :
1. E
(
Xt)
=E(Xt−k)2. Var
(
Xt)
=Var(Xt−k)3. Cov
(
Xt, Xs)
=Cov(
Xt−k, Xs−k)
Dengan :
Xt : data deret waktuke-t
k : waktu ketertinggalan (lag)
pemeriksaan kestasioneran dapat dilakukan dengan melihat plot korelasi terhadap dirinya sendiri. Korelasi terhadap dirinya sendiri merupakan korelasi antar anggota serangkaian pengamatan yang diurutkan berdasarkan waktu. Fungsi korelasi terhadap dirinya sendiri dari data stasioner akan menurun cepat mendekati nol setelah lag kedua atau ketiga. Sedangkan, untuk data yang tidak stasioner akan cenderung lambat mendekati nol untuk beberapa periode waktu (Bowerman & O’Connell, 1987).
Data deret waktu yang tidak stasioner dapat distasionerkan dengan cara mentransformasi, antara lain dengan melakukan pembedaan (Differencing) pada derajat d. Proses pembedaan biasanya dilakukan sampai dua kali karena data aktual umumnya tidaklah stasioner hanya pada satu atau dua tahapan (Makridakis
et al.1983).
Unit root test merupakan uji formal untuk mendeteksi adanya kestasioneran data. Salah satu uji yang sering digunakan yaitu Dickey-Fuller (DF). Uji DF terbentuk dari persamaan dan AR(1), yaitu Xt=a1Xt−1+et dan akan stasioner jika -1< a1 < 1. Untuk a1 =1 proses AR(1) tidak stasioner atau mengandung unit root. Pengaruah kedua sisi persamaan AR(1) di atas dengan Xt−1 ekivalen dengan persamaan : ∇Xt=γXt−1+et , dimana γ=a1−1 . Sehingga uji hipotesis a1=1 ekivalen dengan γ=0 .
Untuk menguji keberadaan intersep dan tren linear pada data, maka persamaan AR(1) diatas akan berubah menjadi ∇Xt=a0+a2t+γXt−1+et . Untuk orde yang lebih tinggi uji DF berkembang menjadi uji Augmented Dickey-Fuller (ADF) yang diGambar.kan sebagai proses AR(p) sebagai berikut (Enders. 1995) :
∇Xt=a0+γ Xt−1+
∑
H0untuk uji ADF adalah data mengandung unit root atau data tidak stasioner.
Hipotesis :
H0 : γ=0 (data tidak stasioner)
H1 : γ<0 (data stasioner)
H0 ditolak jika statistik uji ADF lebih kecil dari nilai kritis MacKinnon
pada taraf nyata tertentu atau P-Value ≤ α, artinya data dapat dikatakan sudah stasioner.
Peramalan merupakan suatu teknik untuk menduga atau memperkirakan suatu nilai pada masa yang akan datang dengan memperhatikan data masa lalu maupun data saat ini. Namun, tidak berarti bahwa setelah mempelajari teknik ini kita dapat meramalkan apa saja dengan tepat. Dalam konteks ini kita hanya mempelajari teknik tertentu yang dapat diaplikasikan pada masalah tertentu. Metode peramalan dibedakan menjadi dua kategori, yaitu metode kualitatif dan metode kuantitatif (Tiro Muhammad. A, 2006).
Model Autoregressive (AR(p))
Model Autoregressive merupakan model yang mengGambar.kan hubungan antara peubah terikat Y dengan peubah bebas yang merupakan nilai Y pada waktu sebelumnya. Dengan kata lain dapat dikatakan ketergantungan nilai pengamatan Xt terhadap Xt−1Xt−2 , ⋯ , Xt−p . Secara umum model AR dapat
Xt : nilai pengamatan pada periode waktu ke-t μ : konstanta
∅p : parameter model AR
et : sisaan pada periode waktu ke-t
Syarat kestasioneran pada model AR (p) dapat dilakukan dengan menggunakan polinomial karakteristik AR yaitu equivalen dengan persamaan karakteristik AR sebagai berikut :
1−∅1x−∅2x 2
−⋯−∅px p
=0
Model Rataan Bergerak (Moving Average)
Model rataan bergerak derajat q ini dilambangkan dengan MA (q). Model Moving
Average (MA) merupakan model yang mengGambar.kan ketergantungan peubah
terkait Y terhadap nilai-nilai galat pada waktu sebelumnya yang berurutan. Dengan kata laian, proses MA menyatakan ketergantungan nilai Xt terhadap
et , et−1 , ⋯ , et−q . Sehingga secara umum model MA dapat dituliskan :
Xt=μ+θq(B)et (2.3)
Dimana :
θq(B) = (1−θ1B1−θ2B2−⋯−θqBq) μ : konstanta
θq : parameter model MA
et : galat acak ke-t
Model ARMA
Model ARMA meruoakan proses campuran AR dan MA. Proses campuran ARMA (p,q) merupakan suatu proses ( Xt ) yang dapat dikatakan mengikuti model campuran Autoregressive –Moving Average ARMA(p,q) jika memenuhi
∅p(B)Xt=θq(B)et . Secara umum model ARMA (p,q) dapat dituliskan dalam
bentuk :
∅p(B)Xt=μ+θq(B)et (2.4)
Dimana :
∅p : parameter model AR
θq : parameter model MA
Model state space
secara bersama beberapa data deret waktu yang saling berhubungan, serta peubah-peubah tersebut memiliki interaksi yang dinamis (Wey, 1989).
Model state space mengGambar.kan suatu data multivariate deret waktu melalui peubah tambahan (state vector). State vector berisi ringkasan semua informasi dari nilai sebelumnya dan nilai sekarang dari suatu deret waktu yang relevan untuk memprediksi nilai yang akan datang (SAS Institute Inc. 2003).
Menurut Wey (1989) dan Akaike (1976) diacu dalam SAS Institute Inc. (2003), model state space merepresentasikan suatu proses stokastik dari zt yang stasioner. Model ini didefinisikan sebagai state transition equation:
zt+1=F zt+G et+1;t=1,2,…T (2.5)
dan persamaan output:
xt=H ztatau xt=
[
Ir,0]
ztDengan :
x :vektor observasi berdimensi r ×1
zt : state vector dengan dimensi s ×1,s ≥ r , dimana r elemen pertama
adalah xt
dan s−r elemen terakhir syarat untuk peramalah xt kedepan
F :matriks koefisien berukuran s−s yang disebut matriks transisi, yang menentukan sifat dinamis dari model
G : matriks koefisien berukuran s ×r yang disebut matriks input, yang menentukan struktur ragam dari persamaan transisi. Untuk identifikasi model, r baris dan kolom pertama dari G disusun menjadi matriks identitas
(
Ir)
berukuran r ×r .ei: vektor sisaan bersifat acak yang menyebar normal berdimensi r dengan nilai
tengah 0 dan matriks kovarian Σee .
Persamaan state disebut juga persamaan sistem atau persamaan transisi. Persamaan output disebut juga persamaan pengukuran atau persamaan observasi. Galat acak et disebut juga vektor inovasi atau shock vector. Persamaan observasi dalam prosedur SAS adalah
Xt=
[
Ir,0]
Zt (2.6)Dimana Ir merupakanmatriks identitas r ×r .SAS akan melakukan ekstraksi Xt dari Zt tanpa penyajian ke dalam persamaan pengukuran.
Hubungan ARMA dan State Space
Setiap model ARMA memiliki penyajian dalam bentuk state space, dan berlaku sebaliknya setiap model state space memiliki penyajian dalam bentuk ARMA. Model ARMA yaitu Φ(B)xt=Θ(B)et atau
xt−Φ1xt−1−…−Φpxt−p=et+Θ1xt−1+…+Θqxt−q . Dimana et merupakan galat acak yang menyebar normal dengan nilai tengah nol dan matriks ragam ∑ee, dan B merupakan beckshift operator
(
B Xt=Xt−1)
, Φ(B) dan Θ(B)merupakan matriks polinomial dalam B, dan Xt merupakan observasi.
Vektor Autoregressive(VAR)
VAR merupakan metode yang dapat dipakai untuk mengetahui apakah satu variabel mempengaruhi variabel lainnya, atau sebaliknya. VAR memiliki n -persamaan, n-variabel linear dimana setiap variabel dapat dijelaskan oleh nilai sebelumnya, nilai ini merupakan nilai di masa lalu dan masa sekarang sampai variabel ke n-1(Chairany et al.2013).
peubah tak bebas dalam model. Secara umum VAR dengan ordo p dapat dituliskan sebagai berikut :
Xt=A0+A1Xt−1+A2Xt−2+⋯+ApXt−p+et (2.7)
Dengan :
Xt : vektor peubah observasi
(
x1,t, x2,t,⋯, xn ,t)
' berukurank ×1A0 : vektor intersep berukuran k ×1
Ai : matriks parameter untuk setiap i = 1,2,..., p
et : vektor sisaan
(
e1,t, e2,t,⋯, en ,t)
' yang berukurank ×1Asumsi yang harus dipenuhi dalam VAR adalah galat yang bersifat white noise.
Koefisien model VAR diduga menggunakan matriks autokovarian contoh (SAS Institute Inc. 2003).
Kriteria Informasi (IC)
Kriteria informasi digunakan sebagai acuan dalam pemilihan model terbaik. Dalam model state space kriteria pemilihan model terbaik yang digunakan adalah Akaike’s Information Criterion (AIC). Model terbaik merupakan model yang memiliki nilai AIC terkecil (SAS Institute Inc. 2003). AIC untuk model VAR menggunakan pendekatan maksimum log likelihood sebagai berikut :
ln(L)≈−n
2ln
(
|
∑^p|
)
(2.8)Maka AIC untuk model orde-p dapat dihitung dengan persamaan :
AICp=nln
|
∑^p
|
: determinan dari matriks kovarian sisaan yang bersifatwhite noise pada
Analisis Korelasi Kanonik
Jenis korelasi yang sering dikenal dalam kasus univariate merupakan korelasi sederhana, korelasi parsial dan korelasi berganda. Dalam kasus multivariate, analisis korelasi lebih dikenal dengan istilah analisis korelasi kanonik. Analisis korelasi kanonik merupakan suatu analisis yang digunakan untuk mengidentifikasi dan mengkuantifikasi hubungan antara dua gugus variabel secara simultan. Analisis korelasi kanonik tidak sesederhana korelasi sederhana, parsial atau berganda. Oleh sebab itu, dalam analisis korelasi kanonik yang di analisis adalah korelasi antar gugus peubah independent dan gugus peubah
dependent, bukan hanya korelasi antar peubah independent dan peubah dependent
(Warsono, 2013).
Penentuan unsur dari state vector melalui serangkaian analisis korelasi kanonik dari matriks autokovarian contoh. Dalam model state space peubah dengan korelasi yang nyata dimasukkan ke dalam state vector. Sedangkan, variabel yang tidak nyata dikeluarkan dari state vector (SAS institute Inc. 2003).
Wei (1989), state vector ditentukan secara unik melalui analisis korelasi kanonik antara sekumpulan nilai observasi saat ini dan observasi masa lalu
x
(¿¿n , xn−1,⋯, xn−p)
¿
dan sekumpulan nilai observasi kejadian sekarang dan
kejadian yang akan datang (¿¿n , xn+1∨nx,⋯, xn+p∨n)
sekarang dan kejadian yang akan datang.
Γ=
[
Pemilihan nilai pmengacu pada model VAR dengan nilai AIC terkecil. Analis korelasi kanonik mengacu pada Block Hankel dari matriks kovarian contoh, dibentuk melalui semua komponen dari data space.
Pn=
[
x1,n, x2,n,⋯, xr , n, x1,n−1, x2,n−1,⋯, xr , n−1,⋯, x1,n−p, x2,n−p,⋯, xr , n−p]
(2.10)
Dan komponen dari predictor space
fn=
[
x1,n, x2,n,⋯, xr , n, x1,n+1∨n, x2,n+1∨n,⋯, xr ,n+1∨n,⋯, x1,n+p∨n, x2,n+p∨n,⋯, xr ,n+p∨n]
(2.11)
Analisis korelasi kanonik membentuk serangkaian state vector, znj .
Pemeriksaan serangkaian fnj dari subvektor fn dan membentuk submatriks Γj terdiri daribaris dan kolom dari Γ yang berhubungan dengan komponen fnj , dan nilai korelasi kanoniknya dapat dihitung. Korelasi kanonik terkecil dari Γj akan digunakan pada pemilihan komponen state vector (SAS Institute Inc. 2003).
Wei (1989), korelasi kanonik antara xn=
[
x1,n, x2,n,⋯, xr , n]
' dan pnvector. Jika sama dengan 0, maka kombinasi linear dari fn
j
tidak berkorelasi dengan pn . Dengan demikian komponen x1,n+1∨n dan beberapa komponen x1,n+k∨n dikeluarkan dari state vector. Pemilihan state vector selesai ketika tidak ada lagi elemen dari fn yang tersisa untuk ditambahkan atau dikeluarkan dari state vector. Untuk setiapproses dari serangkaian analisis korelasi kanonik, korelasi kanonik terkecil yang signifikan
(
ρmin)
dihitung berdasarkan kriteria informasi dari akaike (Wei. 1989).C=−nln
(
1−ρ2min)
−2[
r(p+1)−q+1]
(2.12)Dimana :
q : dimensi dari ftj pada periode atau proses sekarang r : orde pada state vector
p : orde dari proses VAR
jika C< 0, dan ρmin sama dengan 0, atau ρmin > 0. Jika ρmin > 0, x1,n+1∨n
maka ditambahkan ke dalam state vector.
Untuk pengujian kesignifikanan korelasi kanonik ρ salah satu pendekatan yang dapat digunakan adalah uji Chi-Square ( χ2¿ dengan hipotesis :
H0 : ρ=0
H1 : ρ ≠0
Jika χhit2 >χα(db)
2
maka H0 ditolak, artinya korelasi kanonik signifikan.
Pendugaan Parameter
maksimum likelihood. Prosedur ini dilakukan secara iteratif, dugaan yang dilakukan diperoleh dari analisis kanonik dan digunakan untuk memperoleh penduga yang efisien bagi F, G, dan ∑. Pada proses pendugaan ini, salah satu elemen pada F dan G pasti ada yangbesar nilainya kostan seperti 0 dan 1.
Untuk serangkaian n observasi x1, x2,⋯, xn karena xt=(I−FB)−1¿t . penaksiran dan pendugaan statistik. Hal ini telah ditunjukkan oleh Harrison dan Stevens (1975a) yang menyatakan bahwa semua metode peramalan merupakan kasus khusus kalman filter. Dalam hal ini, kalman filter dapat menangani perubahan dalam model, parameter dan varians atau keragaman.
Menurut Wei (1989), kalman filter merupakan prosedur rekursif yang digunakan untuk melakukan dari state vector. Kalman filter merupakan prosedur pembaharuan secara rekursif yang terdiri dari pembentukan dugaan awal dari
state kemudian merevisi dugaan dengan menambahkan koreksi pada dugaan awal.
Besarnya koreksi ditentukan oleh seberapa baik dugaan awal memprediksi observasi baru.
Keakuratan peramalan ^xt(l) bergantungpada kualitas pendugaan ^zt
dari state vector zt.Ketika sebuah informasi yang baru tersedia, harus dilakukan
Dengan Kt+1=Rt+1H '
(
Ω+HRt+1H')
−1dan Rt+1=F ΓtF '
+G∑G ' .
Persamaan (2.14) dan (2.15) merupakan formula rekursif dasar yang digunakan untuk memperbaharui rataan dan matriks kovarian serta sebaran dari
state vector zt+1 setelah observasi baru yaitu xt+1 tersedia.dugaan dari state
yang telah diperbaharui yaitu ^zt+1 merupakan penjumlahan F^zt+1 , yaitu dugaan dari observasi sampai periode waktu ke-t, dengan peramalan error 1 langkah kedepan yaitu et+1=xt+1−^xt(l) . Matriks Kt+1 disebut juga dengan
kalman gain, yang menentukan bobot untuk peramalan error.
Ketepatan Model Peramalan
Ketepatan peramalan dihitung dengan menggunaan rataan presentase kesalahan absolut (Mean Absolute percentage Error, MAPE). Secara matematis MAPE
xt : nilai hasil peramalan
III BAHAN DAN METODE
Bahan
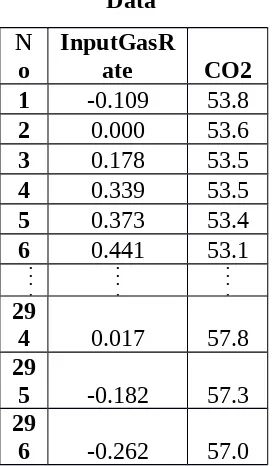
Data yang digunakan dalam laporan ini adalah data sekunder yang diperoleh dalam buku yang dikarang oleh Box dan Jenkins. Data ini berupa konsentrasi gas
furnacesebagai u(t) atau sering disebut peubah input dan persen CO2
sebagai y(t) atau peubah output.
Metode
1. Eksplorasi data gas furnace dan CO2 terhadap waktu.
2. Pemeriksaan kestasioneran data dengan melihat plot data terhadap waktu, plot ACF dan uji ADF.
3. Jika data tidak stasioner maka dilakukan pembedaan atau transformasi terhadap data asli sampai data bersifat stasioner.
4. Melakukan pemodelan ARIMA.
a. Ketika data sudah stasioner, maka identifikasi model dilakukan dengan melihat karakteristik plot ACF dan PACF. Pada tahapan ini, akan diperoleh model tentatif.
b. Selanjutnya akan dilakukan pendugaan parameter dengan proses trial
and error, yaitu dengan memperkecil ordo p dan q yang
mempunyai t -hitung kecil atau menambah ordo p dan q yang memiliki nilai t -hitung besar sehingga diperoleh calon-calon model. Parameter dipilih yang signifikan.
c. Uji Ljung-Box-Pierce dapat dilakukan untuk menguji kesesuaian model. Model terbaik memiliki nilai AIC dan SBC terkecil. Pemeriksaan kesesuaian model juga dapat dilakukan dengan melihat plot RACF dan RPACF. Pemeriksaan asumsi, yaitu sisaan harus acak dan normal. Jika tidak ada model yang layak, maka kembali ke langkah (3) untuk kemudian dicobakan transformasi lain.
5. Pemodelan VAR dilakukan jika sudah diperoleh data yang stasioner, dan menghitung nilai AIC untuk setiap model VAR.
6. Melakukan pemodelan state space.
a. Setelah pemodelan ARMA dan VAR diperoleh, model yang memiliki nilai AIC terkecil digunakan dalam analisis korelasi kanonik.
c. Ketika state space telah ditentukan, maka model state space dapat diterapkan pada data tersebut. Parameter-parameter dalam state space (
F , G dan Σ ) diduga dengan pendekatan maximum likelihood.
7. Peramalan beberapa periode kedepan dapat dilakukan setelah parameter-parameter diduga. Peramalan berdasarkan model state space dapat dilakukan dengan teknik Kalman filter.
IV APLIKASI MODEL STATE SPACE
Data diambil setiap interval 9 detik sekali dengan banyak pengambilan sebanyak 296 kali. Terlihat bahwa rata-rata kecepatan masuk gas adalah -0.056 ft/menit. Sedangkan rata-rata % CO2 yang terdapat di dalam udara selama pembakaran adalah sebesar 53.509. Hasil uji korelasi menghasilkan nilai-p < α
(0.05), sehingga terdapat hubungan antara tingkat masukan gas (Input Gas Rate) dengan %CO2 di udara. Nilai korelasi yaitu sebesar -0.484, artinya semakin tinggi tingkat masukan gas maka semakin rendah %CO2. Hasil uji korelasi dapat dilihat pada Gambar. 2.
Analisis Menggunakan Software SAS
Gambar. 2. Nilai korelasi Input Gas Rate dengan %CO2
Pemeriksaan Kestasioneran
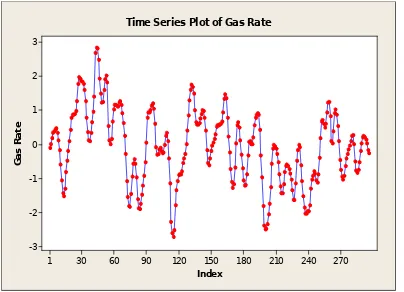
Pemodelan state space didasarkan pada data yang stasioner. Sehingga tahap awal adalah melakukan uji kestasioneran data. Plot data Input Gas Rate dan CO2 dengan waktu dapat dilihat pada Gambar. 3 dan 4. Dari plot tersebut sekilas data stasioner dalam rataan, namun perlu diuji formal untuk meyakinkan apakah data telah stasioner baik rataan dan ragam.
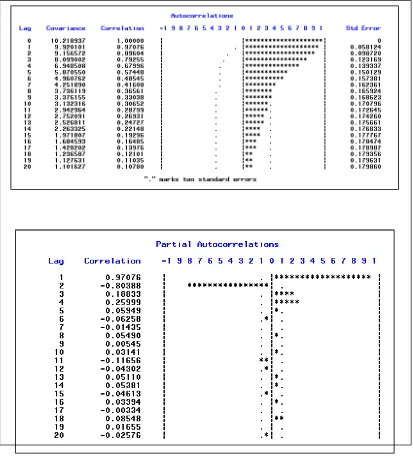
Kestasioneran data dapat dilihat dari plot ACF yang cut off atau tidak turun secara perlahan. Berdasarkan plot ACF data Gas rate dan CO2 terlihat keduanya turun secara perlahan (Gambar. 5 dan 6). Hal ini mengindikasikan data belum stasioner.
Time Series Plot of Gas Rate
Gambar. 3 Plot data aktual Gas Rate
270
Gambar. 4 Plot data aktual Gas Rate
Gambar. 6 Plot ACF dan PACF data CO2
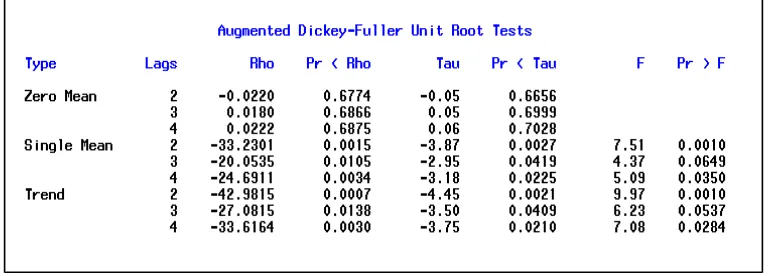
Uji dengan melihat plot ACF dan PACF masih bersifat objektif maka dilakukan uji formal Augmentif Dickey Fuller (ADF). Dengan hipotesis sebagai berikut :
H0 : data tidak stasioner
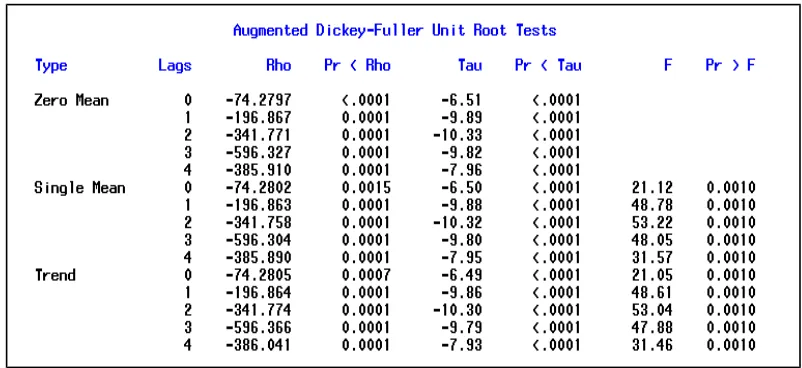
Berdasarkan uji ADF data gas rate (Gambar. 7) dapat dilihat nilai-p pada
zero mean yang kurang dari α (0.05) sehingga hipotesis Hoditolak , artinya
data telah stasioner. Sedangakan untuk data CO2 uji ADF menunjukkan data tidak stasioner darena nilai-p pada zero mean tidak nyata (<0.05). Sehingga pada data CO2 masih belum stasioner (Gambar. 8).
Gambar. 7 Uji Augmented Dickey Fuller untuk data Input Gas Rate
Gambar. 8 Uji Augmented Dickey Fuller untuk data CO2
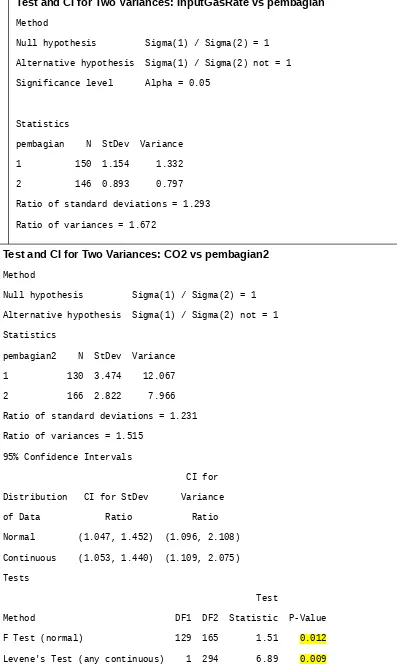
Untuk melihat apakah data stasioner dalam ragam maka dilakukan uji formal Levene, dengan hipotesis sebagai berikut :
H0 : data homogen
Berdasarkan uji Levene pada data gas rate dan CO2 (Gambar. 9 dan 10), terlihat bahwa data tidak stasioner dalam ragam. Hal ini terlihat dari nilai-p yang kurang dari α (0.05), sehingga tolak H0. Maka data gas rate dan CO2 tidak homogen, artinya data tidak stasioner dalam ragam.
Gambar. 9 Uji Levene data Gas rate
Test and CI for Two Variances: InputGasRate vs pembagian
Method
Null hypothesis Sigma(1) / Sigma(2) = 1 Alternative hypothesis Sigma(1) / Sigma(2) not = 1 Significance level Alpha = 0.05
Statistics
pembagian N StDev Variance 1 150 1.154 1.332 2 146 0.893 0.797 Ratio of standard deviations = 1.293 Ratio of variances = 1.672 Test and CI for Two Variances: CO2 vs pembagian2
Method
Null hypothesis Sigma(1) / Sigma(2) = 1 Alternative hypothesis Sigma(1) / Sigma(2) not = 1 Statistics
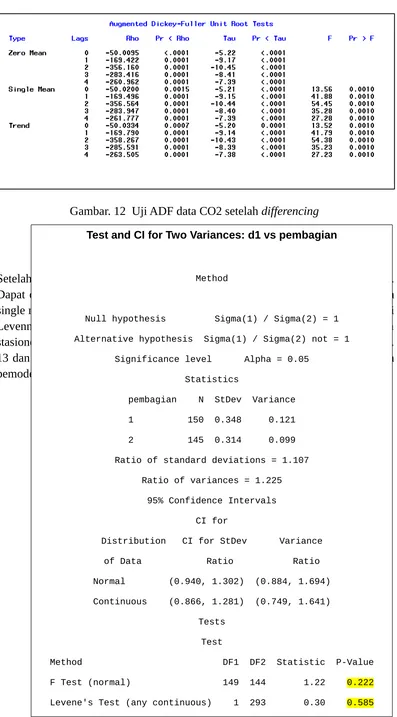
Gambar. 11 Uji ADF data gas rate setelah differencing
Gambar. 12 Uji ADF data CO2 setelah differencing
Oleh karena data masih belum stasioner maka dilakukan differencing.
Setelah dilakukan differencing satu kali maka diuji kembali kestasionerannya. Dapat dilihat dengan uji ADF data gas rate dan CO2 (Gambar. 11 dan 12) pada single mean nilai-p dari kedua data sudah kurang dari 0.05. Begitu pula dengan uji Levenne nilai-p kedua data sudah lebih dari 0.05. Hal ini menunjukkan data sudah stasioner dalam rataan dan ragam. Hasil uji Levenne dapat dilihat pada Gambar. 13 dan 14. Jika data telah stasioner baik ragam dan rataan selanjutnya dilakukan pemodelan state space.
25
Test and CI for Two Variances: d1 vs pembagian
Method
Null hypothesis Sigma(1) / Sigma(2) = 1 Alternative hypothesis Sigma(1) / Sigma(2) not = 1
Significance level Alpha = 0.05 Statistics
pembagian N StDev Variance 1 150 0.348 0.121 2 145 0.314 0.099 Ratio of standard deviations = 1.107
Gambar. 13 Uji Levene data gas rate setelah differencing
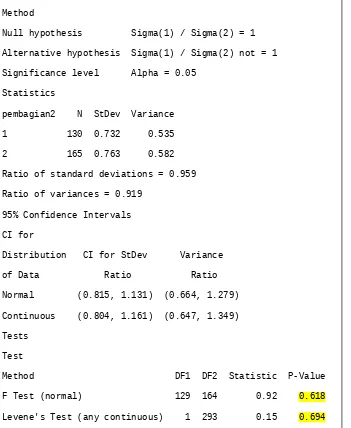
Test and CI for Two Variances: d2 vs pembagian2
Method
Null hypothesis Sigma(1) / Sigma(2) = 1 Alternative hypothesis Sigma(1) / Sigma(2) not = 1 Significance level Alpha = 0.05
Statistics
pembagian2 N StDev Variance 1 130 0.732 0.535 2 165 0.763 0.582 Ratio of standard deviations = 0.959 Ratio of variances = 0.919
95% Confidence Intervals CI for
Distribution CI for StDev Variance of Data Ratio Ratio Normal (0.815, 1.131) (0.664, 1.279) Continuous (0.804, 1.161) (0.647, 1.349) Tests
Test
Gambar. 14 Uji Levene data CO2setelah differencing
Pemodelan State Space pada Gas Rate dengan CO2
Penyeleksian Orde Autoregressive
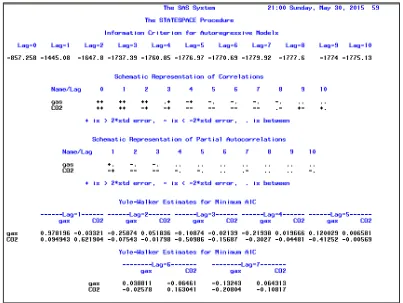
Gambar. 15 Penyeleksian Orde VAR berdasarkan IC terkecil
Berdasarkan Output didapat pula model VAR dengan AIC minimum yang diperoleh dari penduga parameter Yule-Warker sebagai berikut :
[
xiPenentuan unsur dari state vector melalui serangkaian analisis korelasi kanonik dari matriks autokovarian contoh dengan orde p=7 (Gmabar 16). Nilai IC yang negatif (tidak nyata) dikeluarkan dari state vector, sedangkan nilai IC yang positif (nyata) dan terkecil dimasukkan dalam state vector. Pada Output 3 dapat dilihat bahwa nilai IC dari korelasi kanonik x(T+1|T) bernilai positif yaitu sebesar 19.1239, begitu pula nilai IC dari penambahan y(T+1|T) bernilai positif oleh karena itu keduanya dimasukkan dalam state vector. Kemudian komponen ditambah, dan dihitung nilai IC, karena nilai IC bernilai negative, maka x(T+2|T) dan y(T+2|T) tidak dimasukkan dalam state vector.
Berdasarkan uji signifikansi menggunakan uji chi-square ( X2 ), didapat nilai X2hit = 16.0202 dan 13.9292 < X0.05(12)
2
dalam state vector. Dari pengujian kesignifikanan analisis korelasi kanonik, diperoleh komponen yang nyata adalah xt, yt, xt+1∨t, yt+1∨t . Komponen ini menjadi final komponen state vector, sebagai berikut :
zt=
[
xt yt xt+1∨t yt+1∨t]
Gambar. 16 Analisis Korelasi Kanonik
Pendugaan Parameter Model State Space
Informasi dari tahap penyeleksi orde VAR dan penentuan state vector
Gambar. 17 Dugaan awal Model State Space
Gambar. 19 Model State Space yang disesuaikan (fitted)
Dugaan awal (Gambar. 17) yang diperoleh digunakan sebagai nilai awal proses pendugaan parameter secara iterative. Penduga efisien bagi F, G, dan ∑ diperoleh dengan 6 kali iterasi (Gambar. 18). Setelah mengalami enam kali iterasi matriks koefisien bagi F, G dan ∑ diperoleh sebagai berikut (Gambar. 19):
Model State Space dijabarkan sebagai berikut :
Persamaan dalam bentuk diatas dapat dijabarkan sebagai berikut : xt+1=xt+1∨t+e1,t+1
yt+1=yt+1∨t+e2,t+!
xt+2∨t+1=−0.7511xt+0.0330yt+1.4644xt+1∨t−0.0244yt+1∨t+0.9751e1,t+1−0.0531e2,t+!
Gambar. 20 Pendugaan parameter dan uji parsial model state space
Peramalan
Gambar. 21 Hasil peramalan model state space
Terlihat dari plot aktual gas rate dan CO2 tidak jauh berbeda dengan nilai ramalannya. (Gambar. 22 dan Gambar. 23).
1 18 35 52 69 86 103
Gambar. 22 Plot nilai aktual dengan nilai ramalan gas rate
1 18 35 52 69 86 103
Nilai MAD dan MSD untuk Gas rate dan CO2 dapat dilihat pada Tabel.1. Berdasarkan Tabel.tersebut terlihat nilai bahwa nilai MSD dan MAD gas rate dan CO2 cukup kecil.
Tabel.1 Nilai MSD dan MAD
MSD MAD
Gas rate 0.0362 0.1333
KESIMPULAN
Dari hasil pembahasan diatas dapat disimpulkan bahwa penduga parameter model
state Space dilakukan menggunakan pendekatan Maximum Likelihood dengan
proses iterasi. Diperpleh model State Space
1.
xt+2∨t+1=−0.7511xt+0.0330yt+1.4644xt+1∨t−0.0244yt+1∨t+0.9751e1,t+1−0.0531e2,t+!
2.
yt+2∨t+1=−1.4408xt−0.5037yt+1.3807xt+1∨t+1.2139yt+1∨t+0.1021e1,t+1+0.6219e2,t+!
DAFTAR PUSTAKA
Akaike H. 1976. Canonical Correlations Analysis of Time Series and the Use of
an Information Criterion dalam Advances and Case Studies in System
Identification, eds. R. Mehra and D. G. Lainiotis. New York: Academic
Press.
Aswi, Sukarna. 2006. Analisis Deret Waktu Teori dan Aplikasi. Makassar: Andira Publisher.
Makridakis S, Whelwright SC, McGee VE. 1983. Forecasting : Methods and
Applications. 2nd edition. New York : John Wiley and Sons.
Makridakis S, Whelwright SC, McGee VE. 1999. Metode dan Aplikasi
Peramalan. Jakarta: Binapura Aksara.
Montgomery, D. C., L. A. Johnson, & J. S. Gardiner. 1990. Forecasting and Time
Series Analysis. Mc Graw Hill, Singapore.
Nurlaila I. 2007. Penerapan Model ARIMA dan Model State Space pada Indeks
Harga Saham Gabungan dan Nilai Tukar Rupiah Terhadap Dolar Amerika.
Bogor: Skripsi IPB
SAS institute Inc. 2003. SAS/ETS User’s Guide, Version 9.1. Cary, NC, USA: SAS Intitut Inc.
LAMPIRAN
data GasFurnace;
infile "D:/StateSpace/gasdif.txt";
input gas CO2;
run;
proc print;
run;
proc arima data=GasFurnace;
identify var=gas minic scan esacf stationarity=(adf=(0,1,2,3,4)) nlag=20;
run;
proc statespace data=GasFurnace cancorr out=out itprint lead=4;
var gas CO2;
proc print data=out;