DASAR TEORI
2.1 Arduino Mega 2560
Arduino Mega 2560 adalah tipe jenis Arduino yang cukup populer digunakan. Selain memiliki pin masukan dan keluaran yang banyak, Arduino jenis ini memiliki kapasitas memori yang lebih besar dibandingkan dengan beberapa jenis Arduino lainnya.Untuk ukuran dimensi perangkatnya Arduino Mega 2560 termasuk jenis Arduino dengan ukuran board yang besar. Gambar 2.1 menunjukan bentuk fisik Arduino Mega 2560. Adapun spesifikasi singkat mengenai Arduino Mega 2560 adalah sebagai berikut[1] :
Mikrokontroler : ATmega2560 Tegangan Operasional : 5V
Tegangan Masukan (direkomendasi) : 7-12V Tegangan Masukan (batas) : 6-20V
Pin Digital I/O : 54 ( 14 pin untuk keluaran PWM) Analog Input Pins : 16
Arus DC per I/O Pin : 40 mA Arus DC for 3.3V Pin : 50 mA
Memori Flash :256 KB(8 KB digunakan untuk bootloader) SRAM : 8 KB EEPROM : 4 KB Clock Speed : 16 MHz
2.1.1 Mikrokontroler
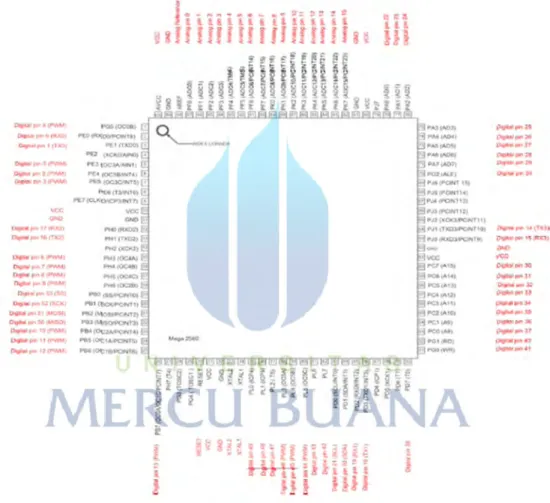
Mikrokontroler yang digunakan pada Arduino Mega 2560 ini adalah Mikrokontroler ATMega 2560. Mikrokontroler inimenjadi komponen utama dari sistem minimum Arduino Mega 2560. Setiap pin mikrokontroler ATMega 2560 dipetakan sesuai dengan kebutuhan standar Arduino pada umumnya. Pemetaan pin (pin mapping) ATMega 2560 dapat dilihat pada Gambar 2.2.
Gambar 2.2 Konfigurasi Pin ATMega2560
2.1.2 Memori Program
Arduino Mega 2560 memiliki 250 Kbyte On-chip In-System Reprogrammable Flash Memory sebagai tempat menyimpan program. Memori flash ini dibagi kedalam dua bagian, yaitu bagian program bootloader dan
aplikasi. Bootloader adalah program kecil yang dieksekusi saat setelah pertama kali sistem dinyalakan. Bootloader ini bekerja sebagai perantara antara memori program dengan software compiler Arduino. Bootloader akan menerima file hasil kompilasi yang telah di-upload ke Arduino dan akan menyimpannya ke memori program kemudian Arduino akan langsung mengeksekusi program tersebut. Peta memori program dapat dilihat pada gambar 2.3.
Gambar 2.3 Peta Memori Program
2.1.3 Memori Data
Memori data pada Arduino Mega2560 terbagi atas SRAM dan EEPROM. SRAM bersifat volatile atau dengan kata lain tidak memiliki kemampuan untuk menyimpan data secara konsisten setelah catu daya dimatikan sedangkan EEPROM bersifat nonvolatile. SRAM yang dimiliki Arduino Mega 2560 berukuran 8KB dan EEPROM yang dimiliki Arduino Mega 2560 berukuran 4KB. Ukuran EEPROM yang dimiliki Arduino jenis ini adalah ukuran EEPROM yang paling besar diantara beberapa jenis Arduino lainnya sehingga EEPROM yang dimiliki Arduino jenis ini dapat dimanfaatkan untuk kebutuhan sistem dengan memori data yang besar.
2.1.4 Pin Input/Output
Arduino Mega 2560 memiliki 54 pin digital yang dapat digunakan sebagai masukan atau keluaran menggunakan fungsi pinMode(), dan menentukan proses penulisan atau pembacaan data I/O menggunakan fungsi digitalWrite() dan digitalRead(). Setiap pin beroperasi pada tegangan 5 volt, mampu menerima atau menghasilkan arus maksimum sebesar 40 mA dan memiliki 20 - 50 Kohm resistor
pull-up internal (diputus secara default). Pin digital ini selain berfungsi sebagai masukan dan keluaran digital namun juga dapat berfungsi sebagai pin dengan fungsi khusus seperti untuk komunikasi UART (pin 0 sebagai RX dan pin 1 sebagai TX), komunikasi SPI, komunikasi I2C, external interrupt dan PWM.
Untuk memanfaatkan pin digital Arduino sebagai pin dengan fungsi khusus, maka register yang terkait dengan fungsi khusus tersebut harus dikonfigurasi terlebih dahulu. Konfigurasi register-register tersebut telah disediakan di pustaka (library) Arduino. Selain fitur pin digital, Arduino Mega 2560 juga memiliki 16 pin analog yaitu pin A0 sampai A15 dan setiap pin menyediakan resolusi sebesar 10 bit[8].
2.1.5 Catu Daya
Arduino dapat diberikan catu daya melalui koneksi USB atau catu daya dari luar non-USB seperti melalui Adaptor AC to DC dan baterai. Jangkauan tegangan yang dapat disuplai ke Arduino sebesar 6 – 20 Volt. Namun tegangan yang direkomendasikan yaitu dari 7 – 12 Volt.
2.1.6 Komunikasi Serial
Komunikasi serial merupakan metode pengiriman data berurut bit demi bit melalui sebuah saluran transmisi. Komunikasi serial memiliki kelebihan diantaranya adalah transimisi data yang dapat dilakukan hanya dengan melalui sebuah saluran sehingga mengurangi costyang dikeluarkan untuk kebutuhan saluran transmisi. Karena hanya membutuhkan satu saluran, maka cara komunikasi ini selalu digunakan untuk komunikasi jarak jauh. Walaupun jarak dekat, komunikasi ini juga sering digunakan dalam komunikasi jarak dekat yang tidak membutuhkan kecepatan tinggi. Namun saat ini teknologi yang digunakan pada perkembangan komunikasi serial semakin canggih sehingga masalah kecepatan transmisi sudah cukup teratasi. Komunikasi serial dapat dilakukan dengan dua cara yaitu sinkron atclockau asinkron. Dikatakan sinkron ketika sisi pengirim dan sisi penerima menggunakan clock bersama. Dikatakan asinkron
ketika sisi pengirim dan sisi penerima menggunakan clock masing-masing (tersendiri) dan dengan frekuensi clock yang hampir sama. Arduino menyediakan kedua jenis komunikasi serial tersebut baik sinkron ataupun asinkron. Jenis komunikasi serial asinkron yang disediakan oleh Arduino adalah UART (TTL logic) sedangkan jenis komunikasi serial sinkron salah satunya adalah SPI.
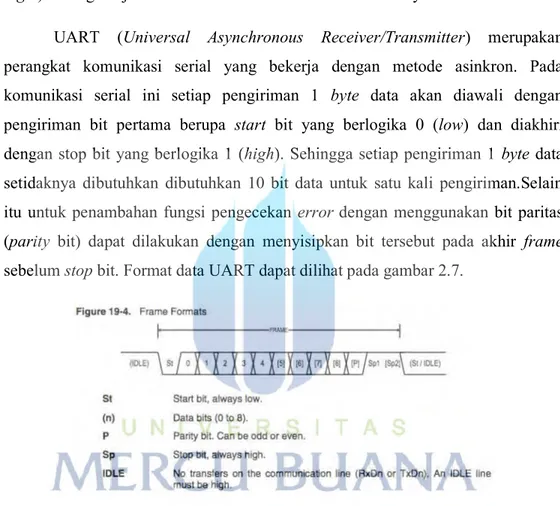
UART (Universal Asynchronous Receiver/Transmitter) merupakan perangkat komunikasi serial yang bekerja dengan metode asinkron. Pada komunikasi serial ini setiap pengiriman 1 byte data akan diawali dengan pengiriman bit pertama berupa start bit yang berlogika 0 (low) dan diakhiri dengan stop bit yang berlogika 1 (high). Sehingga setiap pengiriman 1 byte data setidaknya dibutuhkan dibutuhkan 10 bit data untuk satu kali pengiriman.Selain itu untuk penambahan fungsi pengecekan error dengan menggunakan bit paritas (parity bit) dapat dilakukan dengan menyisipkan bit tersebut pada akhir frame sebelum stop bit. Format data UART dapat dilihat pada gambar 2.7.
Gambar 2.4 Format Data UART
UART memiliki beberapa fitur yang digunakan dalam melakukan komunikasi diantaranya seperti: receive/transmit buffer, shift register,clock generator, parity generator, parity checker. Sebelum melakukan pengiriman atau penerimaan data clock generator akan bekerja dengan membangkitkan clock lokal milik pengirim/penerima. Setiap data yang akan dikirim akan dimuati ke transmit buffer kemudian ditransfer ke shift register PISO untuk dikirim ke penerima. Sama seperti pada proses pengiriman data, data yang diterima akan dimuati shift register PISO kemudian data tersebut dimuati ke receive buffer. Pengaturan
format data, pengaturan baudrate serta beberapa pengaturan fitur-fitur perangkat UART lainnya diatur pada register-register khusus UART. Pada Arduino Mega 2560 terdapat pin TX dan RX yang digunakan sebagai saluran transmit dan receive bagi perangkat komunikasi serial UART. Pada Arduino, inisialisasi komunikasi serial UART dilakukan dengan memanfaatkan fungsi Serial.begin(n) dengan n adalah nilai baudrate. Inisialisasi ini melakukan penentuan baudrate, penentuan format data dan memampukan perangkat UART sebagai receiver atau transmitter. Selanjutnya dengan menggunakan fungsi Serial.print(), Arduino dapat mengirimkan serangkaian karakter-karakter dengan tipe data char(char array/string) ke komputer. Data yang diterima atau dikirim oleh Arduino dapat dimonitor menggunakan serial terminal yang telah disediakan di IDE Arduino.
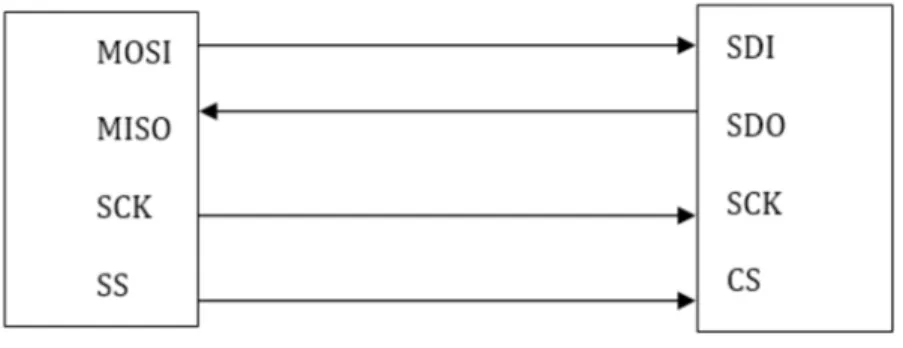
Salah satu jenis komunikasi serial sinkron yang dimiliki oleh Arduino adalah SPI (Serial Peripheral Interface). Komunikasi antara dua perangkat yang menggunakan SPI berlandaskan hubungan master (induk) dan slave (budak). Master dapat berupa mikrokontroler sedangkan slave (budak) dapat berupa mikrokontroler atau perangkat selain mikrokontroler. Pin yang diperlukan dalam komunikasi SPI umumnya menggunakan empat pin yaitu pin MOSI (Master Out Serial In) atau dalam istilah lain SDO (Serial Data Out), pin MISO (Master Out Serial In) atau dalam istilah lain SDO (Serial Data Out), pin SCK (Serial Clock), SS (Slave Select). Perangkat yang dikonfigurasi sebagai master selain bertindak sebagai sumber clock bersama melalui pin SCK. juga bertindak sebagai pemilih perangkat slave melalui pin SS. Konfigurasi fungsi SPI dapat dilihat pada gambar dibawah pada Gambar 2.6.
Saat inisialisasi SPI akan master akan men-disable pin SS sebagai kondisi default, menentukan bit order MSB atau LSB yang terlebih dahulu untuk dikirim, menentukan kecepatan clock, menentukan kapan slave membaca bit data di tepi naik (rising edge) atau tepi jatuh (falling edge) dari pulsa clock dan sekaligus menentukan kapan clock dianggap menganggur apakah pada saat keadaan tinggi atau rendah. Langkah inisialisasi tersebut berada pada fungsi SPI.begin(). Dalam proses pengiriman data, master memilih perangkat slave yang akan diajak berkomunikasi dengan mengkatifkan pin SS berlogika low dilanjutkan pengiriman data melalui pin MOSI dan pengaktifan clock melalui pin SCK. Proses ini dilakukan dengan memanfaatkan fungsi SPI.transfer() untuk memilih perangkat slave. Sama seperti perangkat komunikasi serial yang lain, SPI memiliki shift register yang berfungsi mengkonversi data paralel ke serial pada sisi pengirim maupun sebaliknya pada sisi penerima.
Pada komunikasi antara Arduino dengan komputer, digunakan chip ATMega8U2 yang telah diprogram oleh pabrikan Arduino sebagai serial to USB converter on board. Chip ATMega8U2 ini mengantarai komunikasi antara ATMega2560(main processor) dengan komputer.
2.2 Radio Frequency Identification (RFID)
RFID merupakan suatu teknologi yang menggunakan gelombang radio dengan frekuensi tertentu untuk mengenali suatu benda. Komponen RFID terdiri dari dua komponen utama yaitu tag dan reader. RFID tag atau yang juga dikenal dengan transponder tersusun atas sebuah mikroprosesor, memori dan antena. Setiap komponen penyusun RFID tag memiliki fungsi tersendiri seperti mikroprosesor sebagai pengolah data, memori berguna tempat penyimpanan data, antena berguna memungkinkan mikroprosesor dapat menerima atau mengirim data dari atau ke RFID reader secara nirkabel pada jangkauan yang lebih jauh. baik RFID tag ataupun RFID reader masing-masing harus memiliki saluran frekuensi yang sama juga harus dalam standar protokol yang sama pula sehingga keduanya dapat saling bertukar informasi[1].
Sedangkan RFID reader tersusun atas control unit dan RF interface. Control unit umumnya berisi mikrokontroler, serial interface dan memori. Pada prakteknya RFID reader mengirimkan sinyal analog ke RFID tag. sehingga mengaktifkan (wake up) sirkuit RFID tag. Selanjutnya RFID reader akan mengirim permintaan informasi ke RFID tag. Hal tersebut direspon oleh RFID tag dengan mengirim sinyal balik (backscatter) yang berisi informasi yang diminta oleh RFID reader. Informasi balasan berupa gelombang analog tersebut akan diterima oleh RFID reader dan diubah menjadi informasi digital. Informasi tersebut kemudian akanditeruskan ke middleware (komputer, mikrokontroler). Komponen dasar sistem RFID dapat dilihat pada gambar 2.7.
Gambar 2.6 Sistem RFID
2.2.1 RFID MIFARE RC522
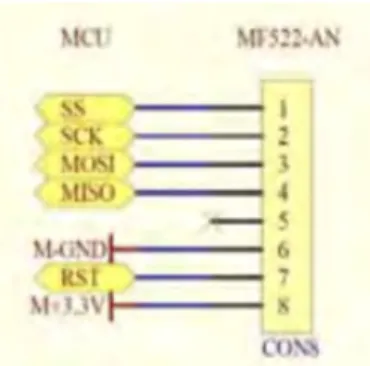
RFID Reader/Writer MIFARE RC522 adalah merupakan produk dari NXP yang menggunakan fully integrated yang bekerja di frekuensi 13.56 Mhz non-contact communication card chip untuk melakukan pembacaan maupun penulisan. MFRC 522 support dengan semua varian MIFARE Ultrcalight, MIFARE DESFire EV1 and MIFARE Plus RF Identification protocols. Konfigurasi pin modul RFID Reader/Writer MIFARE RC522 ditunjukkan pada Gambar 2.7[5].
Gambar 2.7 Konfigurasi pin Modul MFRC522 Spesifikasi dari modul RFID MIFARE RC522 (Elektronika, 2016) : Chipset: MFRC522 Contactless Reader/Writer IC
Frekuensi : 13,56 Mhz
Jarak pembacaan kartu : <50 mm
Protokol akses: SPI (Serial Peripheral Interface) @10 Mbps
Kecepatan transmisi RF: 424 kbps (dua arah/bi-directional)/848 kbps (unidirectional)
Mendukung kartu MIFARE jenis Classic S50/S70, UltraLight, dan DESFire Framing & Error Detection (parity+CRC) dengan 64 byte internal I/O buffer Catu daya: 3,3 Volt
Konsumsi Arus: 13-26 mA pada saat operasi baca/tulis, <80 πA saat modus siaga
Suhu operasional: -20°C s.d +80°C Dimensi: 40 x 50 mm
Mifare RC522 RFID Reader module adalah sebuah modul berbasis IC Philips MFRC522 yang dapat membaca RFID dengan penggunaan yang mudah dan harga yang murah, karena modul ini sudah berisi komponen-komponen yang diperlukan oleh MFRC522 untuk dapat bekerja. Modul ini dapat digunakan langsung oleh MCU dengan menggunakan interface SPI, dengan supply tegangan sebesar 3,3 volt.
2.3 Kartu Cerdas (Smart Card)
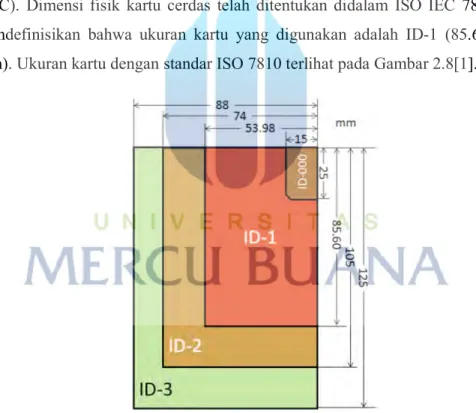
Kartu cerdas (Smart Card) merupakan sebuah kartu yang di dalamnya tertanam IC. Kartu cerdas juga dikenal dengan sebutan Integrated Circuit Card (ICC). Dimensi fisik kartu cerdas telah ditentukan didalam ISO IEC 7810 yang mendefinisikan bahwa ukuran kartu yang digunakan adalah ID-1 (85.60x53.98 mm). Ukuran kartu dengan standar ISO 7810 terlihat pada Gambar 2.8[1].
Gambar 2.9 Standard Ukuran Identification Card
Kartu cerdas dibedakan menurut cara transmisi datanya menjadi dua yaitu kontak (contact) dan nirkontak (contactless). Kartu cerdas kontak memiliki area konduktor yang harus kontak ke reader ketika ingin melakukan komunikasi.
Sedangkan nirkontak, kartu dapat melakukan komunikasi dengan reader tanpa harus melakukan kontak langsung dengan jarak tertentu.
2.4 Bluetooth
Sebuah perangkat bluetooth menggunakan gelombang radio sebagai perantara untuk terhubung perangkat lain. Ketika dua perangkat bluetooth ingin berkomunikasi satu sama lain, mereka perlu melakukan proses pairing. Setelah dilakukan proses pairing inilah, maka kedua perangkat dapat saling mengenali satu sama lain, yang memungkinkan terjadinya komunikasi atau pertukaran data.
Hingga saat ini, terdapat beberapa versi bluetooth yang sudah tersebar di pasaran, mulai dari versi v1.1, v1.2, v2.0, v2.1, v3.0, hingga v4.0. Yang saat ini sering digunakan adalah v2.0 yang memiliki kecepatan transfer data hingga 3Mbps. Sedangkan yang terbaru adalah v4.0 keatas dengan kecepatan transfer data hingga 24 Mbps dan sudah mendukung Bluetooth Low Energy (BLE) dan Generic Attribute Profile (GATT).
Untuk komunikasi arduino menggunakan bluetooth, dapat ditambahkan modul bluetooth yang beredar luas di pasaran, seperti modul HC-04 (modul slave), HC-05 (modul master/slave), HC-06 (modul master)[3].
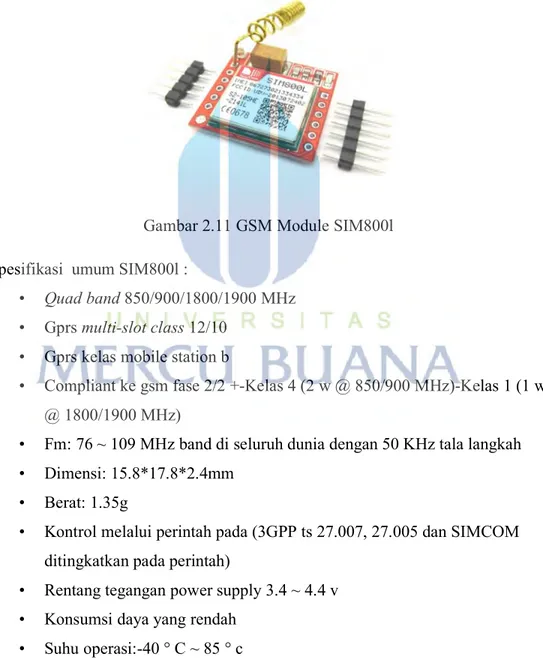
2.5 GSM Module SIM800l
SIM800L merupakan suatu modul GSM yang dapat mengakses GPRS untuk pengiriman data ke internet dengan sistem M2M. AT-Command yang digunakan pada SIM800L mirip dengan AT-Command untuk modulmodul GSM sebelumnya. Sehingga jika diinginkan, modul ini dapat diganti dengan modul gsm lain yang mempunyai komunikasi data serial TTL untuk antarmuka dengan mikrokontroler. SIM800L merupakan keluaran versi terbaru dari SIM900[5].
Gambar 2.11 GSM Module SIM800l Spesifikasi umum SIM800l :
• Quad band 850/900/1800/1900 MHz • Gprs multi-slot class 12/10
• Gprs kelas mobile station b
• Compliant ke gsm fase 2/2 +-Kelas 4 (2 w @ 850/900 MHz)-Kelas 1 (1 w @ 1800/1900 MHz)
• Fm: 76 ~ 109 MHz band di seluruh dunia dengan 50 KHz tala langkah • Dimensi: 15.8*17.8*2.4mm
• Berat: 1.35g
• Kontrol melalui perintah pada (3GPP ts 27.007, 27.005 dan SIMCOM ditingkatkan pada perintah)
• Rentang tegangan power supply 3.4 ~ 4.4 v • Konsumsi daya yang rendah
• Suhu operasi:-40 ° C ~ 85 ° c
Spesifikasi untuk data gprs
• Gprs class 12: max. 85.6 kbps (downlink/uplink) • Dukungan Pbcch
• Skema cs 1, 2, 3, 4 • Ppp-tumpukan
• CSD hingga 14.4 kbps • USSD
• Modus non transparan
2.5.1 Perintah SMS menggunakan AT Command
AT Command adalah perintah-perintah yang digunakan dalam komunikasi dengan Serial port. Dengan AT command kita dapat melihat vendor dari modem yang digunakan, kekuatan sinyal, membaca pesan yang ada pada SIM Card, mengirim pesan, mendeteksi pesan SMS baru yang masuk secara otomatis, menghapus pesan pada SIM Card, dan masih banyak fungsi lainnya.
AT Command sebenarnya hamper sama dengan perintah > (prompt) pada DOS. Perintah-perintah yang digunakan untuk penulisan ke port komputer,dan diawali dengan kata AT, kemudian diikuti karakter lainnya yang memiliki fungsi sendiri-sendiri. Selain digunakan untuk penulisan ke port, AT Command juga dapat digunakan untuk penulisan ke module.
Contoh perintah AT Command[6]:
AT : Untuk mengecek apakah interafce bekerja dengan baik AT+CFUN : Untuk mengeset phone functionality
AT+CFUN? : Untuk mengembalikan nilai yang di set untuk AT+CFUN AT+CFUN=? : Untuk mengembalikan semua nilai yang mungkin dapat
di set untuk AT+CFUN (sama seperti help)
AT+CFUN=1 : Untuk set AT+CFUN ke 1 (full functionality) AT+CREG? : Untuk mendapatkan informasinetwork registration
information. Stat=1 berarti module teregistrasi ke home network. AT+COPS? : Untuk melihat operator yang sudah teregistrasi AT+COPS=? : Untuk melihat semua operator yang tersedia
AT+CMGS : Untuk mengirim sms ATD : Untuk membuat panggilan telepon
2.6 Converter Step Down DC to DC
Konverter DC to DC merupakan sebuah rangkaian elektronik yang berfungsi untuk mengubah daya listrik searah (DC) ke bentuk daya listrik DC lainnya. Jenis konverter DC DC antara lain, Buck Converter untuk menurunkan tegangan, Boost Converter untuk menaikkan tegangan, Buck-Boost Converter untuk menurunkan dan menaikkan tegangan.
Gambar 2.12 Modul Konverter DC DC Penurun Tegangan[7]
Converter step down ini digunakan untuk modul GSM SIM800l dimana modul sim800l hanya dapat menerima input tegangan max 3.7 VDC . sehingga input dari Arduino akan di step down menggunakan LM2596. Spesifikasi dari LM2596 stepdown DC to DC ini adalah sebagai berikut :
Vinput : max DC 48V Voutput : min DC 3V
Setting tegangan output : adjustable Daya : 10W
Dimensi : panjang 4.25 cm x lebar 2 cm x tinggi 1.25 cm Berat : 50 gr
2.7 Solenoid Door Lock
Solenoid door lock adalah salah satu solenoid yang difungsikan khusus sebagai solenoid pengunci pintu secara elektrik. Solenoid ini mempunyai dua sistem kerja, yaitu Normaly Close (NC) dan Normaly Open (NO). Perbedaannya adalah jika cara kerja solenoid NC apabila diberi tegangan, maka solenoid akan memendek (terbuka) dan bila tidak diberi tegangan, maka solenoid akan memanjang (tertutup). Begitu juga dengan cara kerja solenoid NO merupakan kebalikan dari solenoid NC[2].
Gambar 2.13 Solenoid Door Lock
Pada umumnya solenoid door lock membutuhkan input atau tegangan kerja sebesar 9-12V DC tetapi ada juga solenoid door lock yang 6V DC sehingga dapat langsung bekerja dengan tegangan output dari pin digital arduino. Namun jika menggunakan solenoid door lock yang 12V DC berarti dibutuhkan Power Supply 12V DC dan Relay modul untuk mendriver solenoid door lock tersebut dengan board arduino yang akan digunakan.
Solenoid door lock ini berfungsi sebagai aktuator. Di dalam solenoid terdapat kawat yang melingkar pada inti besi. Ketika arus listrik mengalir melalui kawat ini, maka terjadi medan magnet untuk menghasilkan energi yang akan menarik inti besi ke dalam.
2.8 Magnetic Door Switch
Magnetic switch merupakan saklar yang dapat merespon medan magnet yang berada disekitarnya. Magnetic switch ini seperti halnya sensor limit switch yang diberikan tambahan plat logam yang dapat merespon adanya magnet[2].
Gambar 2.14 Bentuk Fisik Magnetic Switch
Magnetic switch tersebut biasa digunakan untuk pengamanan pada pintu dan jendela. Dalam pemasangannya magnetic switch ini dapat dipasang dengan cara ditanam di bagian pintu atau hanya ditempelkan saja di jendela. Pemasangannya pun dapat dilakukan pada pintu atau jendela dengan berbagai bahan, dapat dipasang pada pintu atau jendela yang terbuat dari kayu atau dari logam, seperti aluminium.
Gambar 2.15 Konstruksi Magnetic Switch Spesifikasi :
• Product Name Magnetic Door Contacts
• Contact Capacity 0.5A(Maximum Switch Current) • Voltage 100V
• Rated Power 10W
• Cable Length 10" / 25.4cm
• Size(Approx) 2.8 x 1.5 x 1.3 cm / 1.1" x 0.6" x 0.5"(L*W*H) • Color White / Black
• Housing Material Plastic • Weight 12g
• package Content 1 x Magnetic Door Contacts 4 x Screws
2.9 Keypad Matriks 4x4
Keypad berfungsi sebagai interface antara perangkat (mesin) elektronik dengan manusia atau dikenal dengan istilah HMI (Human Machine Interface). Bentuk keypad 4x4 bisa dilihat pada Gambar 2.15 berikut.
Gambar 2.16 Keypad 4x4
Konstruksi matrix keypad 4×4 untuk mikrokontroler dapat dibuat seeperti gambar 2.16 di berikut.
Konstruksi matrix keypad 4×4 diatas cukup sederhana, yaitu terdiri dari 4 baris dan 4 kolom dengan keypad berupas saklar push buton yang diletakan disetiap persilangan kolom dan barisnya. Rangkaian matrix keypad diatas terdiri dari 16 saklar push button dengan konfigurasi 4 baris dan 4 kolom. 8 line yang terdiri dari 4 baris dan 4 kolom tersebut dihubungkan dengan port mikrokontroler 8 bit. Sisi baris dari matrix keypad ditandai dengan nama Row1, Row2, Row3 dan Row4 kemudian sisi kolom ditandai dengan nama Col1, Col2, Col3 dan Col4. Sisi input atau output dari matrix keypad 4×4 ini tidak mengikat, dapat dikonfigurasikan kolom sebagi input dan baris sebagai output atau sebaliknya tergantung dari programnya.
Proses scaning untuk membaca penekanan tombol pada matrix keypad 4×4 untuk mikrokontroler diatas dilakukan secara bertahap kolom demi kolom dari kolom pertama sampai kolom ke 4 dan baris pertama hingga baris ke 4. Program untuk scaning matrix keypad 4×4 dapat bermacam-macam, tapi pada intinya sama. Misal kita asumsikan keypad aktif LOW (semua line kolom dan baris dipasang resistor pullup) dan dihubungkan ke port mikrokontroler dengan jalur kolom adalah jalur input dan jalur baris adalah jalur output maka proses scaning matrix keypad 4×4 diatas dapat dituliskan sebagai berikut.
1. Mengirimkan logika Low untuk kolom 1 (Col1) dan logika HIGH untuk kolom yang lain kemudian membaca data baris, misal tombol SW1 ditekan maka data baris pertama (Row1) akan LOW sehingga data baris yang dibaca adalah 0111, atau tombol yang ditekan tombol SW5 maka data pada baris ke 2 akan LOW sehingga data yang terbaca 1011, atau tombol SW9 yang ditekan sehingga data yang terbaca 1101, atau tombol SW13 yang ditekan maka data yang dibaca adalah 1110 dan atau tidak ada tombol pada kolom pertama yang di tekan maka data pembacaan baris akan 1111. Mengirimkan logika LOW untuk kolom 2 (Col2) dan logika HIGH untuk kolom yang lain kemudian membaca data baris, misal tombol SW1 ditekan maka data baris pertama (Row1) akan LOW sehingga data baris yang dibaca adalah 0111, atau tombol yang ditekan tombol SW5 maka data pada baris ke 2 akan LOW sehingga data yang terbaca 1011, atau tombol SW9 yang ditekan sehingga
data yang terbaca 1101, atau tombol SW13 yang ditekan maka data yang dibaca adalah 1110 dan atau tidak ada tombol pada kolom pertama yang di tekan maka data pembacaan baris akan 1111.
2. Mengirimkan logika LOW untuk kolom 3 (Col3) dan logika HIGH untuk kolom yang lain kemudian membaca data baris, misal tombol SW1 ditekan maka data baris pertama (Row1) akan LOW sehingga data baris yang dibaca adalah 0111, atau tombol yang ditekan tombol SW5 maka data pada baris ke 2 akan LOW sehingga data yang terbaca 1011, atau tombol SW9 yang ditekan sehingga data yang terbaca 1101, atau tombol SW13 yang ditekan maka data yang dibaca adalah 1110 dan atau tidak ada tombol pada kolom pertama yang di tekan maka data pembacaan baris akan 1111.
3. Mengirimkan logika LOW untuk kolom 4 (Col4) dan logika HIGH untuk kolom yang lain kemudian membaca data baris, misal tombol SW1 ditekan maka data baris pertama (Row1) akan LOW sehingga data baris yang dibaca adalah 0111, atau tombol yang ditekan tombol SW5 maka data pada baris ke 2 akan LOW sehingga data yang terbaca 1011, atau tombol SW9 yang ditekan sehingga data yang terbaca 1101, atau tombol SW13 yang ditekan maka data yang dibaca adalah 1110 dan atau tidak ada tombol pada kolom pertama yang di tekan maka data pembacaan baris akan 1111. Kemudian data pembacaan baris ini diolah sebagai pembacaan data penekanantombol keypad. Sehingga tiap tombol pada matrix keypad 4×4 diatas dengan teknik scaning tersebut akan menghasilkan data penekanan tiap-tiap tombol sebagai berikut. SW1 = 0111 0111 SW9 = 0111 1101 SW2 = 1011 0111 SW10 = 1011 1101 SW3 = 1101 0111 SW11 = 1101 1101 SW4 = 1110 0111 SW12 = 1110 1101 SW5 = 0111 1011 SW13 = 0111 1110 SW6 = 1011 1011 SW14 = 1011 1110 SW7 = 1101 1011 SW15 = 1101 1110 SW8 = 1110 1011 SW16 = 1110 1110
Data port mikrokontroler, misalkan pada SW2 = 1011 0111 tersebut terbagi dalam nible atas dan nible bawah dimana data nible atas (1011) merupakan data yang kita kirimkan sedangkan data nible bawah (0111) adalah data hasil pembacaan penekanan tombol keypad SW2 pada proses scaning matrix keypad 4×4 diatas.
2.10 Buzzer
Buzzer adalah sebuah komponen elektronika yang berfungsi untuk mengubah getaran listrik menjadi getaran suara. Pada dasarnya prinsip kerja buzzer hampir sama dengan loudspeaker, jadi buzzer juga terdiri dari kumparan yang terpasang pada diafragma dan kemudian kumparan tersebut dialiri arus sehingga menjadi elektromagnet. Kumparan tadi akan tertarik ke dalam atau keluar, tergantung dari arah arus dan polaritas magnetnya, karena kumparan dipasang pada diafragma maka setiap gerakan kumparan akan menggerakkan diafragma secara bolak-balik sehingga membuat udara bergetar yang akan menghasilkan suara. Buzzer biasanya digunakan sebagai indikator bahwa proses telah selesai atau sedang berlangsung, dan bisa juga jika terjadi suatu kesalahan pada proses atau sebuah alat (alarm)[2].
Gambar 2.18 Buzzer
Buzzer dapat menghasilkan suara karena mempunyai membran yang terhubung dengan magnet dan koil. Koil merupakan lilitan kabel pada sebuah logam, biasanya tembaga yang berguna untuk menghasilkan gaya magnet. Sinyal
listrik yang melalui koil akan mengakibatkan besar gaya magnet berubah-ubah sehingga membran bergetar dan menghasilkan bunyi.
2.11 Photodioda
Photodioda adalah suatu jenis dioda yang resistansinya akan berubah-ubah apabila terkena sinar cahaya yang dikirim oleh transmitter “LED”. Resistansi dari photodioda dipengaruhi oleh intensitas cahaya yang diterimanya, semakin banyak cahaya yang diterima maka semakin kecil resistansi dari photodioda dan begitupula sebaliknya jika semakin sedikit intensitas cahaya yang diterima oleh sensor photodioda maka semakin besar nilai resistansinya[2].
Pada dasarnya sensor photodioda sama seperti sensor LDR, yaitu mengubah besaran cahaya yang diterima sensor menjadi perubahan konduktansi (kemampuan suatu benda menghantarkan arus listrik dari suatu bahan). Seperti yang terlihat pada gambar 2.18 merupakan bentuk fisik dari sensor photodioda.
Gambar 2.19 Simbol dan bentuk fisik untuk photodioda
Photodioda terbuat dari bahan semikonduktor. Photodioda yang sering digunakan pada rangkaian-rangkaian elektronika adalah photodioda dengan bahan silicon (Si) atau gallium arsenide (GaAs), dan lain-lain termasuk indium antimonide (InSb), indium arsenide (InAs), lead selenide (PbSe), dan timah sulfide (PBS).
Prinsip dasar photodioda yaitu ketika pada kondisi awal IR LED sebagai transmitter cahaya akan menyinari photodioda sebagai receiver sehingga nilai resistansi pada sensor photodioda akan minimum dengan kata lain nilai Vout akan mendekati logika 0 (low). Sedangkan pada kondisi kedua cahaya pada IR LED terhalang sehingga photodioda tidak dapat menerima cahaya dari IR LED maka nilai resistansi R1 maksimum, sehingga nilai Vout akan mendekati Vcc yang berlogika 1 (high). Adapun rumus perhitungan untuk menghitung nilai dari Vout photodioda ataupun untuk menghitung nilai resistansi dari photodioda tersebut yaitu :
Vout
... (1) Keterangan :Vin = tegangan masukan pada rangkaian sensor photodioda Vout = tegangan keluaran pada rangkaian sensor photodioda
photodioda = resistansi dari photodioda
R2 = resistansi resistor pada rangkaian sensor photodioda 2.12 Optocoupler
Optocoupler digunakan untuk mengisolasi antara rangkaian AC dengan rangkaian DC. Berdasarkan arti katanya Opto berarti optic dan coupler (kopling) berarti pemicu sehingga bias diartikan optocoupler bekerja berdasarkan picu cahaya optic dan digunakan sebagai saklar elektrik yang bekerja secara otomatis.
Optocoupler terdiri dari berbagai jenis (baik merek, bentuk, dan tipe), pada percobaan kami kali ini penulis menggunakan optocoupler MOC3021 keluaran Motorola. Optocoupler terdiri dari dua bagian yaitu:
1. Bagian transmitter yang dibangun dari sebuah LED infra merah. Jika dibandingkan dengan menggunakan LED biasa, LED infra merah memiliki ketahanan yang lebih baik terhadap sinyal tampak. Cahaya yang dipancarkan oleh LED infra merah tidak terlihat oleh mata telanjang.
2. Bagian receiver yang dibangun dengan dasar komponen Photodiode. Photodiode merupakan suatu transistor yang peka terhadap tenaga cahaya. Suatu sumber cahaya menghasilkan energi panas, begitu pula dengan spektrum infra merah. Karena spekrum inframerah mempunyai efek panas yang lebih besar dari cahaya tampak, maka Photodiode lebih peka untuk menangkap radiasi dari sinar infra merah.
Oleh karena itu Optocoupler dapat dikatakan sebagai gabungan dari LED infra merah dengan photodiode yang terbungkus menjadi satu chip. LED infra merah ini merupakan komponen elektronika yang memancarkan cahaya infra merah dengan konsumsi daya sangat kecil. Jika diberi bias maju, LED infra merah yang terdapat pada optocoupler akan mengeluarkan panjang gelombang sekitar 0,9 mikrometer. Photodiode merupakan komponen elektronika yang berfungsi sebagai detektor cahaya infra merah.
Proses terjadinya pancaran cahaya pada LED infra merah dalam optocoupler adalah sebagai berikut, saat dioda menghantarkan arus, elektron lepas dari ikatannya karena memerlukan tenaga dari catu daya listrik. Setelah elektron lepas, banyak elektron yang bergabung dengan lubang yang ada di sekitarnya (memasuki lubang lain yang kosong).
Pada saat masuk lubang yang lain, elektron melepaskan tenaga yang akan diradiasikan dalam bentuk cahaya, sehingga dioda akan menyala atau memancarkan cahaya pada saat dilewati arus. Cahaya infra merah yang terdapat pada optocoupler tidak perlu lensa untuk memfokuskan cahaya karena dalam satu chip mempunyai jarak yang dekat dengan penerimanya.
Prinsip kerja dari optocoupler adalah :
a. Jika antara Photodiode dan LED terhalang maka Photodiode tersebut akan off sehingga output dari kolektor akan berlogika high.
b. Sebaliknya jika antara Photodiode dan LED tidak terhalang maka Photodiode tersebut akan on sehingga outputnya akan berlogika low. Ditinjau dari penggunaannya, fisik optocoupler dapat berbentuk macam-macam. Bila hanya digunakan untuk mengisolasi level tegangan atau data pada sisi transmitter dan sisi receiver, maka optocoupler ini biasanya dibuat dalam bentuk solid (tidak ada ruang antara LED dan Photodiode). Sehingga sinyal listrik yang ada pada input dan output akan terisolasi. Dengan kata lain optocoupler ini digunakan sebagai optoisolator jenis IC.
Sebagai piranti elektronika yang berfungsi sebagai pemisah antara rangkaian power dengan rangkaian control. Komponen ini merupakan salah satu jenis komponen yang memanfaatkan sinar sebagai pemicu on/off-nya. Opto berarti optic dan coupler berarti pemicu, maka optocoupler berarti suatu komponen yang bekerja berdasarkan picu cahaya optic. Optocoupler yang juga disebut sensor digunakan sebagai isolator dari rangkaian tegangan rendah ke rangkaian bertegangan tinggi.
IC MOC 3021 memiliki 6 kaki, kaki anoda (1) dihubungkan ke vcc, kaki katoda (2) dihubungkan dengan pulsa trigger yang aktif low, kaki 4 dan 6 dihubungkan dengan beban (lampu). Dua kaki lainnya yaitu kaki 3 dan 5 tidak digunakan (not connected). Optocoupler bisa di juga dikatakan sebagai driver TRIAC karena secara tidak langsung, optocoupler yang memberikan pemicu pada kaki gate TRIAC sehingga TRIAC aktif dan lampu menyala.
2.13 TRIAC
TRIAC (Triode for Alternating Current) merupakan komponen elektronika yang terdiri dari dua SCR yang disambungkan antiparalel dan kaki gerbangnya disambungkan bersama. TRIAC bersifat konduktif dalam dua arah (bidirectional), karena itu terminal nya tidak dapat ditentukan sebagai anode atau katode.
Gambar 2.21 TRIAC
TRIAC merupakan komponen 3 elektroda: MT1, MT2, dan gate. Oleh karena aplikasi triac yang demikian luas maka komponen triac biasanya mempunyai dimensi yang besar dan mampu diaplikasikan pada tegangan 100V sampai 800V dengan arus beban dari 0.5A sampai 40A.
Jika terminal MT1 dan MT2 diberi tegangan jala-jala PLN dan gate dalam kondisi mengambang maka tidak ada arus yang dilewatkan oleh triac (kondisi idel) sampai pada tegangan break over TRIAC tercapai. Kondisi ini dinamakan kondisi off triac. Apabila gate diberi arus positif atau negatif maka tegangan break over ini akan turun.
Semakin besar nilai arus yang masuk ke gate maka semakin rendah pula tegangan break overnya. Kondisi ini dinamakan sebagai kondisi on TRIAC. Apabila TRIAC sudah on maka triac akan dalam kondisi on selama tegangan pada MT1 dan MT2 di atas nol (0) volt. Apabila tegangan pada MT1 dan MT2 sudah mencapai nol volt maka kondisi kerja triac akan berubah dari on ke off. Apabila triac sudah menjadi off kembali, triac akan selamanya off sampai ada arus trigger ke gate dan tegangan MT1 dan MT2 melebihi tegangan break overnya.
Triac yang penulis gunakan adalah BT136, berbeda dengan SCR yang hanya melewatkan tegangan dengan polaritas positif saja, TRIAC dapat dipicu
dengan tegangan polaritas positif dan negatif, serta dapat dihidupkan dengan menggunakan tegangan bolak-balik pada Gate. TRIAC banyak digunakan pada rangkaian pengedali dan pensaklaran pada rangkaian AC bertegangan tinggi.
2.14 Regulator Tegangan
Regulator tegangan merupakan regulator yang di design untuk mengatur sebuah keluaran dari catu daya secara otomatis sesuai dengan kebutuhan dari pengguna. Peralatan elektronik membutuhkan sumber tegangan dalam operasinya baik itu tegangan AC (Alternate current) atau DC (dirrect current) dan besarnya output sumber tegangan harus disesuaikan dengan kebutuhan system elektronika itu sendiri. Oleh karena itu digunakanlah sebuah regulator untuk mengubah tegangan dari catu daya agar sesuai dengan kebutuhan suatu peralatan elektronik.
Gambar 2.22 LM7805
Pada percobaan kami kali ini kami menggunakan IC keluarga LM78XX, yaitu IC LM7805. IC ini merupakan regulator 5V, dimana IC ini berfungsi untuk merubahkan tegangan supplai menjadi 5V. Penggunaan IC ini bertujuan untuk memberi supplai VCC pada rangkaian inti.
Seri 78xx memiliki beberapa keunggulan dibandingkan regulator tegangan lainnya antara lain :
a. Seri 78xx tidak memerlukan komponen tambahan untuk meregulasi tegangan, membuatnya mudah digunakan, ekonomis dan hemat ruang.
b. Seri 78xx memiliki rangkaian pengaman terhadap pembebanan lebih, panas tinggi dan hubungsingkat, membuatnya hampir tak dapat dirusak. Dalam keadaan tertentu, kemampuan pembatasan arus peranti 78xx tidak hanya melindunginya sendiri, tetapi juga melindungi rangkaian yang ditopangnya. Seri 78xx memiliki beberapa kekurangan yang mungkin membuatnya kurang diinginkan untuk penggunaan tertentu antara lain :
a. Tegangan masukan harus lebih tinggi dari tegangan keluaran (biasanya 2-3 volt). Ini membuatnya tidak tepat digunakan untuk penggunaan tegangan rendah, misalnya regulasi 5 volt dari sumber baterai 6 volt tidak akan bekerja dengan 7805.
b. Sebagaimana regulator linier lainnya, arus masukan sama dengan arus keluaran. Karena tegangan masukan lebih tinggi daripada tegangan keluaran, berarti ada daya yang diboroskan.
2.15 LCD 16 x 2
LCD (Liquid Crystal Display) adalah suatu jenis media tampilan yang menggunakan kristal cair sebagai penampil utama. Sumber cahaya didalam sebuah perangkat LCD adalah lampu neon berwarna putih di bagian belakang susunan kristal cair tadi. LCD sudah banyak digunakan dalam bidang elektronika sebagai alat penampil.
LCD yang digunakan adalah LCD dot matrik dengan jumlah karakter 16x2 dimana LCD tersebut memiliki 2 baris dan setiap barisnya terdiri dari 16 karakter. LCD ini nantinya akan digunakan untuk menampilkan status kerja alat, yaitu berupa tampilan deteksi RFID dan keypad pada saat digunakan. Bentuk fisik dari LCD dapat dilihat pada Gambar 2.22.
Adapun fitur yang disajikan dalam LCD ini adalah : a. Terdiri dari 16 karakter dan 2 baris.
c. Terdapat karakter generator terprogram. d. Dapat dialamati dengan mode 8-bit dan 4-bit. e. Dilengkapi dengan back light
. Gambar 2.23 Modul LCD 16x2
Pada LCD 16x2 terdapat 16 buah pin yang masing-masing memiliki fungsi khusus. Tabel 2.3 menunjukkan fungsi dari masing-masing dari LCD 16x2.
Tabel 2.1 Pin pada LCD dan fungsinya
PIN Nama Fungsi
1 VSS Ground voltage
2 VCC +5V
3 VEE Contrast voltage
4 RS
Register Select
0 = Instruction Register 1 = Data Register
5 R/W
Read/ Write, to choose write or read mode
0 = write mode 1 = read mode
6 EN
Enable
0 = start to lacht data to LCD character
7 DB0 LSB 8 DB1 - 9 DB2 - 10 DB3 - 11 DB4 - 12 DB5 - 13 DB6 - 14 DB7 MSB
15 BPL Back Plane Light
16 GND Ground voltage
2.16 Push Button
Push button adalah salah satu jenis saklar yang secara mendasar fungsinya sama dengan semua saklar lainnya yaitu melakukan kontak nyala-padam (on-off) dengan cara membuka dan menutup sirkuit listrik. Push button adalah saklar yang beroperasi dengan cara ditekan, dan bisa melakukan dua fungsi berbeda, yakni menutup sirkuit bila ditekan (Normally Open), atau justru membuka sirkuit bila ditekan (Normally Close). Jika tekanan dilepaskan atau terjadi tekanan berikutnya, maka akan menormalkan kembali tombol ke posisi semula dan sirkuit kembali ke status semula.
Ada beberapa jenis Push button, diantaranya adalah sebagai berikut : 1. PTM (push to make) switch atau NOPB (normally-open push-button)
Push button jenis ini bekerja apabila tombol ditekan maka akan menutup sirkuit. Contoh tombol PTM atau NOPB adalah seperti yang digunakan sebagai tombol klakson sepeda motor dan mobil.
2. PTB (push to-break) switch atau NCPB (normally-close push-button) Push button jenis ini bekerja apabila tombol ditekan, maka akan membuka sirkuit. Jika tekanan dilepaskan atau terjadi tekanan berikutnya, maka akan menormalkan kembali tombol ke posisi semula dan sirkuit kembali ke status semula. Contoh tombol PTB atau NCPB adalah seperti yang digunakan sebagai tombol penyala lampu penerangan-dalam pada pintu kulkas dan pintu mobil, dimana lampu padam bila pintu ditutup dan sebaliknya menyala bila pintu dibuka.
2.17 Perbandingan dengan Alat yang Sudah Pernah Dibuat
Pada alat sebelumnya yang mereferensi dari jurnal milik Agus Dwi Pramono, “Rancang Bangun Smart Room Berbasis RFID Menggunakan Microcontroller ATMega16”, Universitas Mercu Buana, 2016 perancangan sistem yang digunakan hanya menggunakan RFID sebagai akses masuk utama dan menggunakan photodioda emergency sebagai akses darurat. Untuk automatisasi alat sebelumnya menggunakan RF-Remote sebagai kendali peralatan listrik di dalam rumah.
Pada pengembangan yang dilakukan pada pembuatan alat sebelumnya yaitu dengan menambahkan akses masuk tambahan berupa keypad yang digunakan untuk memasukan password tertentu sebagai akses masuk kedua setelah RFID. Untuk sistem automatisasi yang baru yaitu dengan menggunakan bluetooth yang dapat terhubung dengan smartphone. Selain jarak yang kerja efektif didapatkan lebih jauh, user tidak perlu repot menyiapkan battery untuk mengganti catu daya untuk remote. User hanya perlu menyiapkan smartphone yang saat ini sudah sangat banyak digunakan oleh banyak orang.
Selain itu sistem pengamanan tambahan yang lain adalah dengan adanya modul GSM yang berfungsi untuk mengirimkan sms kepada user apabila ada akses masuk selain akses masuk utama yaitu menggunakan RFID. Sms dapat berupa pemberitahuan dan peringatan kepada user sehingga user mengetahui akses masuk yang digunakan selain menggunakan RFID dan user dapat segera melakukan tindakan apabila ada upaya masuk yang tidak diinginkan ke dalam rumah.