viii
INTISARI
Saat hari raya besar seperti Natal, Idul Fitri, aneka kue biasanya dihidangkan dalam rangka menghormati tamu-tamu yang bersilahturahmi ke rumah yang merayakan. Aneka kue disajikan, yakni kue kering dan kue basah. Salah satu hidangan kue basah adalah lapis legit. Lapis legit merupakan kue yang dibuat dari campuran adonan tepung, telur, dan mentega, yang dipanaskan dalam suhu tertentu dan memanggangnya harus dari lapis per lapis. Dalam proses memanggang inilah yang menjadi kendala bagi para ibu rumah tangga yang memiliki kesibukan pekerjaan yang tidak bisa ditinggalkan. Dari permasalahan tersebut, muncul ide untuk membuat pemanggang lapis legit yang bisa digerakkan secara otomatis.
Prinsip kerja alat ini adalah ketika adonan dimasukkan kedalam wadah adonan, maka pintu oven akan membuka otomatis dan konveyor akan bergerak keluar. Kemudian katup adonan membuka dan adonan mengalir ke loyang. Lengan robot bergerak kearah loyang dan mulai meratakan adonan. Lengan robot naik, konveyor masuk,dan pintu tertutup untuk membuat adonan matang terlebih dahulu. Setelah matang, maka loyang akan keluar oleh konveyor yang diikuti pintu yang terbuka. Lengan robot turun ke loyang untuk menekan kue yang sudah matang. Proses diulang lagi dari dituangnya adonan ke dalam loyang dan seterusnya, hingga mencapai lapisan yang diinginkan.
Hasil akhir dari penelitian ini adalah didapatkannya fungsionalitas dari tiap sub sistem dari sistem secara keseluruhan, yang membuktikan bahwa hampir semua sub sistem bekerja dengan optimal, kecuali motor DC 12V tidak berfungsi optimal, yang menyebabkan sistem secara keseluruhan menjadi tidak sesuai dengan yang diinginkan.
ix
ABSTRACT
When major holidays like Christmas, Eid , cakes usually served in honor of the guests who were celebrating it. Cakes are served, ie, pastries and cakes moist. One dish moist cake is “lapis legit”.“Lapis legit” is a cake made of batter mix flour, eggs and butter, which is heated in a specific temperature and bake it must be on the layer by layer. In the baking process is the primary obstacle for the housewives who have busy work that can’t be abandoned. Of these problems, came the idea to create a“lapis legit”grills that can be moved automatically.
The working principle of this device is when dough inserted into the container, then the oven door will open automatically and the conveyor will move out. Then the dough valve opening and pouring batter onto the baking sheet. The robotic arms move toward the pan and begins to flatten the dough. A robotic arm ride, conveyors sign, and the door closed to make the dough cooked in advance. Once cooked, the pan will come out by conveyor followed by the open door. A robotic arm to press down onto the baking sheet cake is cooked. The process is repeated again from poured batter into the pan and so on, until it reaches the desired coating. The end result of this research is the obtainment of the functionality of each sub-system of the overall sub-system, which proves that almost all the sub-sub-systems working optimally, except the 12V DC motor is not functioning optimally, causing the overall system be not as expected.
TUGAS AKHIR
PEMANGGANG LAPIS LEGIT OTOMATIS
BERBASIS MIKROKONTROLER ATMEGA 8535
Diajukan untuk memenuhi salah satu syarat
memperoleh gelar Sarjana Teknik pada
Program Studi Teknik Elektro
Disusun oleh:
CATUR RAGIL PAMUNGKAS
NIM: 115114025
PROGRAM STUDI TEKNIK ELEKTRO
FAKULTAS SAINS DAN TEKNOLOGI
UNIVERSITAS SANATA DHARMA
YOGYAKARTA
FINAL PROJECT
AUTOMATIC BAKED “LAPIS LEGIT”
BASED ON ATMEGA 8535 MICROCONTROLLER
In partial fulfillment of the requirements
for the degree of Sarjana Teknik
Electrical Engineering Study Program
CATUR RAGIL PAMUNGKAS
NIM: 115114025
ELECTRICAL ENGINEERING STUDY PROGRAM
SCIENCE AND TECHNOLOGY FACULTY
SANATA DHARMA UNIVERSITY
YOGYAKARTA
HALAMAN
PERSETUJ{JANTUGAS
AKHIR
PEMAI{GGAI{G LAPIS
LEGIT
OTOMATIS
BERBASIS
MIKROKOI\TROLER
Disusun oleh
CATUR RAGIL PAMUNGKAS
NIM: 115114025
Telah disetujui oleh:
Dosen Pembimbing
Martanto, S.T.,M.T. t anggar:
. )\
j{r,r,-1
/"tt
Ketua Sekretaris Anggota
HALAMAN PENGESAHAN
TUGAS AKHIR
PEMANGGANG LAPIS
LEGIT
OTOMATIS
BERBASIS
MIKROKOI\TROLER
ATMBGA
8535Disusun Oleh
CATUR RAGIL PAMUNGKAS
MM:
Il5l14025Telah dipertahankan didepan panttia penguj i pada tanggal 18 Februari 2016
dan dinyatakan memenuhi syarat
Nama Lengkap
: Djoko Untoro Suwarno, S.Si.,M.T.
: Martanto, S.T.
: Ir. Th. Prima Ari Setyani, S.T., M.T.
Yogyakarta, 2.3. .lylAR€.T... ...2016
Fakultas Sains dan Teknologi Universitas Sanata Dharma
lv
Tanda Tangan
PERNYATAAN KEASLIAN KARYA
"Saya menyatakan dengan sesungguhnya bahwa
tugas akhir ini tidak memuat karya atau bagian karya orang lain, kecuali yang disebutkan dalam kutipan dan daftar pustaka
sebagaimana layaknya karya ilmiah"
vi
HALAMAN PERSEMBAHAN DAN MOTTO HIDUP
MOTTO:
KAMU BOLEH SEDIH, KAMU BOLEH GALAU, KAMU BOLEH DEPRESI,
TAPI KAMU TIDAK BOLEH MENYERAH,
KARENA MENYERAH MERUPAKAN PENGHANCUR MASA DEPANMU
“anomymous”
Karya ini kupersembahkan untuk
Yesusku, Penyemangat dan Pengharapanku
Ibuku yang selalu menyemangati dan mendoakanku siang malam
Almarhum ayahku yang selalu menyemangatiku ketika beliau hidup
Alex, sahabatku yang selalu membantu
Teman-teman seperjuangan TE 2011
HALAMAI{
PERNYATAAN
PERSETUJUAN
PUBLIKASI KARYA
ILMIAH
UNTUK KEPENTINGAN
AKADEMIS
Yang bertanda tangan di bawah ini. sava mahasiswa Universitas Sanata Dlrarrna :
Nama : Catur Rasil Parnungkas
Nomor Mahasisu,a : I 151 14025
Demi pengembangan ilmu pengetahuan. saya memberikan kepada Perpustakaarr Universitas
Sanata Dharma. karya ilrr-riah saya yang berjudul:
PEMANGGANG LAPIS
LEGIT OTOMATIS
BERBASISMIKROKONTROLER
Beserta perangkat yang diperlukan (bila ada). Dengan demikian saya telah memberikan kepada Perpustakaan Universitas Sanata Dharmahak untuk menyimpan, mengalihkan dalam bentuk
media lain, m.engelolanya dalam bentuk pangkalan data, dan rnendistribusikan secara terbatas. dan mempublikasikannya di internet atau media lain untuk kepentingan akademis tanpa perlu meminta ijin dari saya ataupun memberikan royalti kepada saya , selama tetap mencantumkan nama saya sebagai penulis.
Demikian pernyataan ini saya buat dengan sebenarnya.
Yogyakarla
..Y.Yft...*.?.1.€.vil
viii
INTISARI
Saat hari raya besar seperti Natal, Idul Fitri, aneka kue biasanya dihidangkan dalam rangka menghormati tamu-tamu yang bersilahturahmi ke rumah yang merayakan. Aneka kue disajikan, yakni kue kering dan kue basah. Salah satu hidangan kue basah adalah lapis legit. Lapis legit merupakan kue yang dibuat dari campuran adonan tepung, telur, dan mentega, yang dipanaskan dalam suhu tertentu dan memanggangnya harus dari lapis per lapis. Dalam proses memanggang inilah yang menjadi kendala bagi para ibu rumah tangga yang memiliki kesibukan pekerjaan yang tidak bisa ditinggalkan. Dari permasalahan tersebut, muncul ide untuk membuat pemanggang lapis legit yang bisa digerakkan secara otomatis.
Prinsip kerja alat ini adalah ketika adonan dimasukkan kedalam wadah adonan, maka pintu oven akan membuka otomatis dan konveyor akan bergerak keluar. Kemudian katup adonan membuka dan adonan mengalir ke loyang. Lengan robot bergerak kearah loyang dan mulai meratakan adonan. Lengan robot naik, konveyor masuk,dan pintu tertutup untuk membuat adonan matang terlebih dahulu. Setelah matang, maka loyang akan keluar oleh konveyor yang diikuti pintu yang terbuka. Lengan robot turun ke loyang untuk menekan kue yang sudah matang. Proses diulang lagi dari dituangnya adonan ke dalam loyang dan seterusnya, hingga mencapai lapisan yang diinginkan.
Hasil akhir dari penelitian ini adalah didapatkannya fungsionalitas dari tiap sub sistem dari sistem secara keseluruhan, yang membuktikan bahwa hampir semua sub sistem bekerja dengan optimal, kecuali motor DC 12V tidak berfungsi optimal, yang menyebabkan sistem secara keseluruhan menjadi tidak sesuai dengan yang diinginkan.
ix
ABSTRACT
When major holidays like Christmas, Eid , cakes usually served in honor of the guests who were celebrating it. Cakes are served, ie, pastries and cakes moist. One dish moist cake is “lapis legit”.“Lapis legit” is a cake made of batter mix flour, eggs and butter, which is heated in a specific temperature and bake it must be on the layer by layer. In the baking process is the primary obstacle for the housewives who have busy work that can’t be abandoned. Of these problems, came the idea to create a“lapis legit”grills that can be moved automatically.
The working principle of this device is when dough inserted into the container, then the oven door will open automatically and the conveyor will move out. Then the dough valve opening and pouring batter onto the baking sheet. The robotic arms move toward the pan and begins to flatten the dough. A robotic arm ride, conveyors sign, and the door closed to make the dough cooked in advance. Once cooked, the pan will come out by conveyor followed by the open door. A robotic arm to press down onto the baking sheet cake is cooked. The process is repeated again from poured batter into the pan and so on, until it reaches the desired coating. The end result of this research is the obtainment of the functionality of each sub-system of the overall sub-system, which proves that almost all the sub-sub-systems working optimally, except the 12V DC motor is not functioning optimally, causing the overall system be not as expected.
x
KATA PENGANTAR
Puji dan syukur penulis panjatkan kepada Tuhan Yesus Kristus karena telah memberikan rahmat-Nya sehingga penulis dapat menyelesaikan laporan tugas akhir ini dengan judul “PEMANGGANG LAPIS LEGIT OTOMATIS BERBASIS MIKROKONTROLER”. Laporan tugas akhir ini disusun untuk memenuhi syarat memperoleh gelar sarjana teknik.
Selama pembuatan tugas akhir ini penulis menyadari bahwa begitu banyak pihak telah memberikan bantuan baik bantuan materi, moral maupun dukungan. Oleh karena itu penulis ingin mengucapkan terimakasih kepada :
1. Tuhan Yang Maha Esa yang telah memberikan berkah dan anugerah berupa kesehatan jasmani maupun rohani dari awal hingga akhir.
2. Petrus Setyo Prabowo, S.T., M.T., Ketua Program Studi Teknik Elektro Universitas Sanata Dharma.
3. Pak Martanto S.T.,M.T., dosen pembimbing yang dengan penuh setia, kesabaran dan pengertian untuk membimbing dalam menyelesaikan Tugas Akhir ini..
4. Pak Djoko Untoro Suwarno S.Si., M.T., dan ibu Ir. Th. Prima Ari Setyani, M.T. selaku dosen penguji yang telah memberi masukan dan kritik dalam revisi penulisan Tugas Akhir ini
5. Bapak dan Ibu dosen yang telah mengajarkan banyak ilmu yang bermanfaat selama menempuh pendidikan di Universitas Sanata Dharma.
6. Segenap laboran dan karyawan Fakultas Sains dan Teknologi yang telah memberikan dukungan secara tidak langsung dalam kelancaran penulis mengerjakan penulisan tulisan tugas akhir ini.
7. Kedua orang tua penulis yang telah banyak memberikan dukungan doa, kasih sayang dan motivasi selama menempuh pendidikan di Universitas Sanata Dharma. 8. Teman – teman seperjuangan Teknik Elektro 2011 yang telah menemani di saat
menempuh pendidikan di Universitas Sanata Dhama.
Penulis menyadari bahr,va dalarr, penyllsLrnan laporan tLrgas akhir rnasilr rnen-salami
kendala darr tidak lLrput dari kesalahan. Oleh karerra itLr. penulis mengharapkan masukan.
kritik. dan saran yang membangun agar skripsi
ini
rnenjadi lebih baik lagi. Dan penr.rlisberharap semoga skripsi ini dapat bermant'aat sebagairnana mestinya
Yogvakarta"
22
Marct
PenLrlisCatur Ragil PamLrnskas 2016
xii
DAFTAR ISI
Halaman
HALAMAN JUDUL
... iHALAMAN PERSETUJUAN
.. ... iiiHALAMAN PENGESAHAN
. ... ivPERNYATAAN KEASLIAN KARYA
... vHALAMAN PERSEMBAHAN DAN MOTTO HIDUP
... viLEMBAR PERNYATAAN PERSETUJUAN PUBLIKASI KARYA
ILMIAH UNTUK KEPENTINGAN AKADEMIS
. ... viiINTISARI
... viiiABSTRACT
... ixKATA PENGANTAR
. ... xDAFTAR ISI
. ... xiiDAFTAR GAMBAR
. ... xvDAFTAR TABEL...
xviiBAB I PENDAHULUAN
1.1. Latar Belakang... 11.2. Tujuan dan Manfaat Penelitian... 1
1.3. Batasan Masalah ... 2
1.4. Metodologi Penelitian ... 2
BAB II DASAR TEORI
2.1. Lapis Legit... 52.2. ATMEGA8535 ... 6
2.2.1. Arsitektur ATMEGA8535... 6
2.2.2. Fitur ATMEGA8535 ... 6
2.2.3. Konfigurasi Pin ATMEGA8535 ... 8
2.2.4. Peta Memori ... 9
2.2.5. Status Register (SREG) ... 10
2.3. LCD(Liquid Crystal Display)... 11
xiii
2.5. Codevision AVR Eval ... 16
2.6. Motor Servo... 17
2.7. Volume Bangun Ruang ... 19
2.8. Solenoid... 20
2.9 Motor DC ... 21
2.10. Buzzer... 22
BAB III RANCANGAN PENELITIAN
3.1. Perancangan Alat Secara Umum... 243.2. Perancangan Alat SecaraHardware... 25
3.2.1. Rangkaian Minimum Sistem Mikrokontroler Atmega8535 ... 25
3.2.2. Rangkaian LCD ... 28
3.2.3. Rangkaian Keypad... 29
3.2.4. Wadah Adonan Lapis Legit ... 30
3.2.5. Oven dengan Pintu Otomatis... 30
3.2.6. Lengan Robot ... 31
3.3. Perancangan Alat SecaraSoftware... 33
3.3.1. Diagram Alir Utama Sistem ... 33
3.3.2. Diagram Alir Lengan Robot (Motor Servo) ... 35
BAB IV HASIL DAN PEMBAHASAN
4.1. Hasil Implementasi Alat ... 374.2. Hasil Perancangan Perangkat Keras ... 38
4.2.1. Wadah Adonan ... 38
4.2.2. Minimum Sistem, LCD, dan Keypad ... 39
4.2.3. Lengan Robot ... 41
4.2.4. Oven... ... 42
4.3. Hasil Perancangan dan Pembahasan Perangkat Lunak ... 44
4.3.1. Oven... ... 44
4.3.2. Lengan Robot... ... 44
4.3.3. Wadah Adonan... ... 46
4.3.4. LCD dan Keypad... ... 47
4.4. Pengujian Alat... ... 49
4.4.1. Pengujian Oven (Motor DC 12V)... ... 49
xiv
4.4.3. Pengujian Wadah Adonan... ... 53
4.4.4. Pengujian LCD dan Keypad... ... 55
4.5. Analisis Sistem Secara Keseluruhan dan Per Sub Sistem... ... 57
BAB V KESIMPULAN DAN SARAN
5.1. Kesimpulan... 595.2. Saran ... . 59
DAFTAR PUSTAKA
... 60xv
DAFTAR GAMBAR
Halaman
Gambar 1.1. Blok Diagram Sistem Pemanggang Lapis Legit Otomatis ... 3
Gambar 2.1. Blok diagram fungsional ATMega8535 ... 7
Gambar 2.2. Pin ATMega8535 ... 8
Gambar 2.3. Program memori ... 9
Gambar 2.4. Peta Data Memory ... 10
Gambar 2.5. EEPROM Data Memory... 10
Gambar 2.6. Status Register ATMega 8535... 11
Gambar 2.7. Contoh Bentuk LCD (Liquid Cristal Display) ... 12
Gambar 2.8. Konstruksi matrix keypad 4x4... 14
Gambar 2.9. Contoh Motor Servo ... 17
Gambar 2.10. Kontruksi Motor Servo... 18
Gambar 2.11. Buzzer... 22
Gambar 3.1. Rancangan Oven... 23
Gambar 3.2. Rancangan Lengan Robot... 23
Gambar 3.3. Rancangan Corong... 24
Gambar 3.4. Rangkaian Osilator ... 26
Gambar 3.5. Rangkaian Reset ... 26
Gambar 3.6. Rangkaian Minimum Sistem Mikrokontroler ATMega8535 ... 28
Gambar 3.7. Rangkaian LCD………..………...29
Gambar 3.8. Rangkaian Keypad... 29
Gambar 3.9. Mode on off solenoid... 30
Gambar 3.10. Mode Oven ... 31
Gambar 3.11. Gerakan Motor Servo ... 32
Gambar 3.12. Mode Motor Servo Ujung ... 33
Gambar 3.13. Flowchart Sistem ... 34
Gambar 3.14. Diagram Alir Lengan Robot ... 35
Gambar 4.1. Hasil Implementasi Alat ... 37
xvi
Gambar 4.3 Servo Alas Bawah Adonan….... 39
Gambar 4.4. Minsis, Keypad, dan LCD ... 40
Gambar 4.5. Lengan Robot. ... 41
Gambar 4.6. IC L298... 42
Gambar 4.7. Oven (Tampak Samping)... 43
Gambar 4.8. Motor DC 12V penggerak konveyor dan pintu otomatis ... 43
Gambar 4.9. Hasil Keluaran dari Minsis ... 50
Gambar 4.10. Hasil Keluaran dari Kaki Motor DC ... 51
Gambar 4.11. Lengan Robot ... 52
Gambar 4.12. Ujicoba Servo Katup Adonan dan Servo Alas Adonan... 54
xvii
DAFTAR TABEL
Halaman
Tabel 2.1. Rumus Volume Bangun Ruang... 19
Tabel 3.1. Tabel penggunaan port-port ... 27
Tabel 3.2. Tabel Hubungan Derajat Motor Servo 180 ̊dan PWM... 36
Tabel 4.1. Penggunaan Port Minimum Sistem pada wadah adonan. ... 39
Tabel 4.2. Penggunaan Port untuk LCD dan Keypad ... 40
Tabel 4.3. Penggunaan Port untuk Servo dan Motor Dc pada Lengan Robot ... 41
Tabel 4.4. Penggunaan Port untuk menggerakkan motor DC 12V………42 Tabel 4.5. Hasil Ujicoba Lengan Robot sebanyak 10 kali ... 53
Tabel 4.6. Hasil Ujicoba Wadah Adonan dengan 10 kali Ujicoba……… 55
1
Bab I
Pendahuluan
1.1.
Latar Belakang
Saat hari raya besar seperti Natal, Idul Fitri, aneka kue biasanya dihidangkan dalam rangka menghormati tamu-tamu yang bersilahturahmi ke rumah yang merayakan. Aneka kue disajikan, yakni kue kering dan kue basah. Salah satu hidangan kue basah adalah lapis legit. Lapis legit merupakan kue yang dibuat dari campuran adonan tepung, telur, dan mentega, yang dipanaskan dalam suhu tertentu dan memanggangnya harus dari lapis per lapis.
Dalam proses memanggang inilah yang menjadi kendala bagi para ibu rumah tangga yang memiliki kesibukan pekerjaan yang tidak bisa ditinggalkan. Menjadi kendala karena proses memanggangnya yang cukup lama. Dalam memanggang satu lapisan saja diperlukan waktu 3-6 menit (tergantung suhunya) dan lapisannya tidak hanya satu saja, yakni bervariasi antara 10-20 lapisan. Bila dikalkulasikan secara matematis, maka waktu yang diperlukan untuk menghasilkan satu buah lapis legit adalah antara 30 sampai 120 menit(2 jam). Ini merupakan waktu yang tidak singkat. Banyak hal bisa dilakukan dalam kurun waktu 30 menit - 2 jam.
Maka dari itu, penulis mendapatkan ide untuk membuat alat untuk memudahkan memanggangnya dengan nama “Pemanggang Lapis Legit Otomatis Berbasis
Mikrokontroler ATMega 8535”. “Pemanggang Lapis Legit Otomatis Berbasis
Mikrokontroler ATMega 8535” bila dijelaskan secara singkat yakni untuk mengambil alih proses memanggang yang dirasa cukup lama, hanya dengan cukup mensetting berapa jumlah lapisan yang diinginkan. Kemudian membuat lapisan per lapisan menggunakan lengan robot untuk meratakan dan menekan adonan . Serta adanya bunyi pemberitahuan ketika lapis legit telah matang.
1.2.
Tujuan dan Manfaat
karena mereka sudah tidak perlu repot memanggang lapisan per lapisan dari lapis legitnya hingga matang.
1.3.
Batasan Masalah
Batasan dari masalah yang penulis harapkan yakni: a. Loyang jenis tabung/lingkaran dengan ukuran d= 20cm, t=7cm b. Pemodelan oven dengan pintu geser otomatis.
c. Wadah adonan dengan katup otomatis membuka dan menutup dengan keypad dan display LCD di bagian luar wadah adonan untuk mensetting jumlah lapisan, dan sistem akan tetap berjalan meskipun tidak ada adonan (simulasi)
d. Lengan robot untuk meratakan adonan dan dan memadatkan lapisan yang sudah matang.
e. Maksimum lapisan yang diinginkan 10 lapisan
Pintu geser otomatis menggunakan gear box untuk menggeser pintunya, katup otomatis wadah adonan menggunakan katup solenoid biasa dengan control on off, dan lengan robot menggunakan motor servo 180 ̊ di bagian pangkal dan tengah lengan robot,
dan motor servo 360 ̊ di bagian ujung lengan robot. Semua dikendalikan dan diatur oleh mikrokontroler ATMega 8535.
1.4.
Metodologi Penelitian
Penulisan tugas akhir ini menggunakan metode: a. Studi Kepustakaan
Pengumpulan bahan-bahan acuan dan referensi yang mendukung penulisan tugas akhir ini. Studi kepustakaan yang mencakup literatur mengenai penulisan tugas akhir dan segala sesuatu yang mendukungnya
b. Perancangan SistemHardwaredanSoftware
penggunaan Buzzer sebagai pengingat bahwa lapis legit telah matang dan siap diangkat dari oven.
Perancangan software menggunakan mikrokontroler sebagai “otak” dari perancangan alat yang dimasukkan program menggunakan bahasa pemrograman C dengan menggunakan softwareCodeVision AVR
Gambar 1.1 Blok Diagram Sistem Pemanggang Lapis Legit Otomatis
c. Pembuatan Hardware dan Software
Mikrokontroler merupakan otak dari sistem pemanggang lapis legit otomatis ini. Mikrokontroler akan menerima input dari user melalui display LCD dan keypad. Kemudian mengolah input, menjadi keluaran yang dilakukan oleh katup adonan yang dikontrol secara on off. Kemudian akan membuka pintu oven yang terbuka bersamaan dengan keluarnya Loyang, dan lengan robot akan digerakkan untuk mengaduk adonan pada proses pertama, menekan adonan kearah bawah untuk memampatkan lapisan pada proses kedua. Disertai Buzzer untuk mengingatkan bahwa proses pemanggangan lapis legit telah usai.
d. Proses Pengujian dan Pengambilan Data.
Teknik pengambilan data dilakukan dengan cara menguji alat tersebut untuk simulasi memanggang lapis legit. Dimana dilihat respon dan tanggapan dari peralatan yang disetting otomatis tersebut. Pengujian dilihat dari banyaknya simulasi lapisan yang dapat dilakukan, respon in out loyang, pintu geser dan lengan robot.
pintu oven dan konveyor loyang, yang dilihat adalah hubungan antara proses keluar masuknya Loyang dari oven dan respon pintu membuka dan menutup bersamaan dengan Loyang yang masuk dan keluar dari oven. Di bagian lengan robot, yang dilihat adalah hubungan antara lamanya proses perataan adonan dan penekanan kue.
e. Analisis dan Kesimpulan
5
Bab II
Tinjauan Pustaka dan Dasar Teori
2.1.
Lapis Legit
Lapis legit adalah kue basah yang dibuat dengan cara memanggang lapisan demi lapisan adonan yang dituang kedalam loyang yang telah disediakan [1]. Bahan yang digunakan merupakan bahan kue pada umumnya. Bahan yang digunakan untuk membuat lapis legit terdiri dari:
30 butir Kuning telur 500 gram Gula halus
450 gram Mentega Caping kalengan 100 gram Mentega Caping Timbang 50 gram Susu bubuk
1 sdt Bumbu spekuk
1 sdt TBM
Cara membuatnya cukup mudah, hanya saja proses memanggangnya yang lama. Cara membuatnya yakni:
1. Kocok kuning telur menggunakan mixer selama 10 menit, ini adonan 1.
2. Masukkan gula halus, mentega caping kalengan , dan mentega caping timbang ke dalam 1 wadah, kocok hingga rata selama kurang lebih 15 menit, ini adonan 2. 3. Campurkan adonan 1 dan 2, kocok rata.
4. Masukkan TBM, Spekuk, dan susu bubuk. Aduk rata selama 10 menit.
5. Loyang diolesi mentega biasa dan ditaburi tepung terigu secara merata. Masukkan kedalam oven dahulu selama 2 menit.
6. Masukkan adonan sebanyak 3 sendok sayur ukuran sedang ke dalam cetakan berbentuk lingkaran dengan ukuran diameter 20cm dan tinggi 7 cm.
7. Untuk setiap lapisan, bakar di oven dengan suhu api atas 180 ̊Celcius selama kurang lebih 5 menit. Keluarkan dari oven, lalu tekan-tekan permukaannya. Tuang lapisan berikutnya, bakar lagi. Demikian seterusnya hingga adonan habis.
2.2.
ATMega 8535
Mikrokontroler adalah sebuah sistem mikroprosesor di mana di dalamnya sudah terdapat CPU, ROM, RAM, I/O, clock dan perlatan internal lainnya yang sudah terhubung dan terorganisasi dengan baik oleh pabrik pembuatnya dan dikemas dalam satu chip yang siap pakai [3]. Sehingga, dengan demikian kita tinggal memprogram isi ROM sesuai dengan aturan oleh pabrik pembuatnya. Salah satu contoh mikrokontroler yang banyak beredar di pasaran adalah mikrokontroler ATMega8535.
2.2.1 Arsitektur ATMega 8535
Dari gambar 2.1 dapat dilihat bahwa ATMega 8535 memiliki bagian sebagai berikut: 1. Saluran I/O sebanyak 32 buah, yaitu Port A, Port B, Port C, dan Port D
2. ADC 10 bit sebanyak 8 saluran
3. Tiga buah Timer/Counter dengan kemampuan pembandingan 4. CPU yang terdiri dari atas 32 buah register
5. Watchdog Timer dengan osilator internal 6. SRAM sebesar 512 byte
7. Memori Flash sebesar 8 kb dengan kemampuan Road White Write 8. Unit Interupsi Internal dan Ekternal
9. Port antarmuka SPI
10. EEPROM sebesar 512 byte yang dapat diprogram saat operasi 11. Antarmuka komparator analog
12. Port USART untuk komunikasi serial
2.2.2. Fitur ATMega 8535
Kapabilitas detail dari ATMega8535 adalah sebagai berikut:
1. System mikroprosesor 8 bit berbasis RISC dengan kecepatan maksimal 16 MHz 2. Kapabilitas memori flash 8 KB, SRAM sebesar 512 byte, dan EEPROM
(Electrically Erasable Programmable Read Only Memori) sebesar 512 byte. 3. ADC internal dengan fidelitas 10 bit sebanyak 8 channel.
2.2.3. Konfigurasi Pin ATMega8535
Secara umum konfigurasi dan fungsi pin ATMega8535 yang terdapat pada gambar 2.2 dapat dijelaskan sebagai berikut:
1. VCC merupakan pin yang berfungsi sebagai pin input sumber tegangan (+) 2. GND merupakan pin Ground (-)
3. Port A (PA7 … PA0)Berfungsi sebagai input analog dari ADC (Analog to Digital Converter). Port ini juga berfungsi sebagai port I/O dua arah, jika ADC tidak digunakan.
4. Port B (PB7 … PB0)Berfungsi sebagai port I/O dua arah. Port PB5, PB6 dan PB7 juga berfungsi sebagai MOSI, MISO dan SCK yang dipergunakan pada proses downloading.
5. Port C (PC7 … PC0)Berfungsi sebagai port I/O dua arah. Fungsi lain port ini selengk apnya bisa dibaca pada buku petunjuk ”AVR ATMega8535”.
6. Port D (PD7 … PD0)Berfungsi sebagai port I/O dua arah. Port PD0 dan PD1 juga berfungsi sebagai RXD dan TXD, yang dipergunakan untuk komunikasi serial. 7. RESET Input reset.
8. XTAL1 merupakan pin input ke amplifier inverting osilator dan input ke sirkuit clock internal.
9. XTAL2 merupakan pin output dari amplifier inverting osilator. 10. AVCC merupakan pin input tegangan untuk Port A dan ADC. 11. AREF merupakan pin input tegangan referensi untuk ADC.
2.2.4. Peta Memory
a. Program Memori
ATMega8535 memiliki On-Chip In-System Reprogrammable Flash Memory untuk menyimpan program [2]. Untuk alasan keamanan, program memory dibagi menjadi dua bagian yaitu Boot Flash Section dan Application Flash Section. Boot Flash Section digunakan untuk menyimpan program Boot Loader, yaitu program yang harus dijalankan pada saat AVR reset atau pertama kali diaktifkan. Application Flash Section digunakan untuk menyimpan program aplikasi yang dibuat oleh user. AVR tidak dapat menjalankan program aplikasi ini sebelum menjalankan Boot Loader. Besarnya memori Boot Flash Section dapat deprogram dari 128 word sampai 1024 word, tergantung setting pada konfigurasi bit di register BOOTSZ. Jika Boot Loader diproteksi, maka program pada Application Flash Section juga sudah aman. Gambar 2.3 menunjukkan pemetaan dari program memori.
Gambar 2.3. Program memori [2] b. Data Memory
Gambar 2.4 menunjukkan mengenai peta dari data memori tersebut.
Gambar 2.4. Peta Data Memory [2] c. EEPROM Data Memory
ATMega8535 memiliki EEPROM sebesar 512 byte untuk menyimpan data. Lokasinya terpisah dengan sistem address register, data register, dan control register yang dibuat khusus untuk EEPROM.
Gambar 2.5. EEPROM Data Memory [2]
2.2.5. Status Register (SREG)
Gambar 2. 6 Status Register ATMega 8535 [4] a. Bit 7–I : Global Interrupt Enable
Jika bit Global Interrupt Enable diset, maka fasilitas interupsi dapat dijalankan. Bit ini akan clear ketika ada interrupt yang dipicu dari hardware, setelah program interrupt dieksekusi, maka bit ini harus di set kembali dengan instruksi SEI.
b. Bit 6–T : Bit Copy Storage
Instruksi bit copy BLD dan BST menggunakan bit T sebagai sumber atau tujuan dalam operasi bit.
c. Bit 5–H: Half Carry Flag d. Bit 4–S : Sign Bit
Bit S merupakan hasil exlusive or dari Negative Flag N dan Two’ s Complement
Overflow Flag V.
e. Bit 3– V : Two’ s Complement Overflow Flag
Digunakan dalam operasi aritmatika f. Bit 2–N : Negative Flag
Jika operasi aritmatika menghasilkan bilangan negatif, maka bit ini akan set. g. Bit 1–Z : Zero Flag
Jika operasi aritmatika menghaslkan bilangan nol, maka bit ini akan set. h. Bit 0–C : Carry Flag
Jika suatu operasi menghasilkan Carry, maka bit ini akan set.
2.3.
LCD (Liquid Cristal Display)
Display elektronik adalah salah satu komponen elektronika yang berfungsi sebagai tampilan suatu data, baik karakter, huruf ataupun grafik [5]. LCD (Liquid Cristal Display) adalah salah satu jenis display elektronik yang dibuat dengan teknologi CMOS logic yang bekerja dengan tidak menghasilkan cahaya tetapi memantulkan cahaya yang ada di sekelilingnya terhadapfront-litatau mentransmisikan cahaya dariback-lit.
a. Material LCD (Liquid Cristal Display)
[image:31.595.80.527.219.695.2]LCD adalah lapisan dari campuran organik antara lapisan kaca bening dengan elektroda transparan indium oksida dalam bentuk tampilan seven-segment dan lapisan elektroda pada kaca belakang. Ketika elektroda diaktifkan dengan medan listrik (tegangan), molekul organik yang panjang dan silindris menyesuaikan diri dengan elektroda dari segmen. Lapisan sandwich memiliki polarizer cahaya vertikal depan dan polarizer cahaya horisontal belakang yang diikuti dengan lapisan reflektor. Cahaya yang dipantulkan tidak dapat melewati molekul-molekul yang telah menyesuaikan diri dan segmen yang diaktifkan terlihat menjadi gelap dan membentuk karakter data yang ingin ditampilkan. Gambar 2.7 merupakan contoh dari bentuk LCD tersebut.
Gambar 2.7. Contoh Bentuk LCD (Liquid Cristal Display)[5] b. Pengendali / Kontroler LCD (Liquid Cristal Display)
Dalam modul LCD (Liquid Cristal Display) terdapat microcontroller yang berfungsi sebagai pengendali tampilan karakter LCD (Liquid Cristal Display).
Microcontroller pada suatu LCD (Liquid Cristal Display) dilengkapi dengan memori dan register.
Memori yang digunakanmicrocontrolerinternal LCD adalah :
1. DDRAM (Display Data Random Access Memory)merupakan memori tempat karakter yang akan ditampilkan berada.
2. CGRAM (Character Generator Random Access Memory) merupakan memori untuk menggambarkan pola sebuah karakter dimana bentuk dari karakter dapat diubah-ubah sesuai dengan keinginan.
yang sudah ditentukan secara permanen oleh pabrikan pembuat LCD (Liquid Cristal Display)tersebut sehingga pengguna tinggal mangambilnya sesuai alamat memorinya dan tidak dapat merubah karakter dasar yang ada dalamCGROM.
Register control yang terdapat dalam suatuLCDdiantaranya adalah.
1. Register perintah yaitu register yang berisi perintah-perintah dari mikrokontroler ke panelLCD (Liquid Cristal Display)pada saat proses penulisan data atau tempat status dari panelLCD (Liquid Cristal Display)dapat dibaca pada saat pembacaan data. 2. Register data yaitu register untuk menuliskan atau membaca data dari atau ke
DDRAM. Penulisan data pada register akan menempatkan data tersebut ke DDRAM
sesuai dengan alamat yang telah diatur sebelumnya.
Pin, kaki atau jalur input dan kontrol dalam suatu LCD (Liquid Cristal Display) diantaranya adalah :
1. Pin data adalah jalur untuk memberikan data karakter yang ingin ditampilkan menggunakanLCD (Liquid Cristal Display) dapat dihubungkan dengan bus data dari rangkaian lain seperti mikrokontroler dengan lebar data 8 bit.
2. Pin RS (Register Select)berfungsi sebagai indikator atau yang menentukan jenis data yang masuk, apakah data atau perintah. Logika low menunjukan yang masuk adalah perintah, sedangkan logika high menunjukan data.
3. Pin R/W (Read Write) berfungsi sebagai instruksi pada modul jika low tulis data, sedangkan high baca data.
4. PinE (Enable)digunakan untuk memegang data baik masuk atau keluar.
5. Pin VLCD berfungsi mengatur kecerahan tampilan (kontras) dimana pin ini dihubungkan dengan trimpot 5 KΩ , jika tidak digunakan dihubungkan ke ground, sedangkan tegangan catu daya ke LCD sebesar 5 Volt.
2.4.
Keypad Matriks 4x4
Konstruksi matrix keypad 4×4 untuk mikrokontroler dapat dibuat seperti pada gambar berikut:
a. Konstruksi Matrix Keypad 4×4 Untuk Mikrokontroler
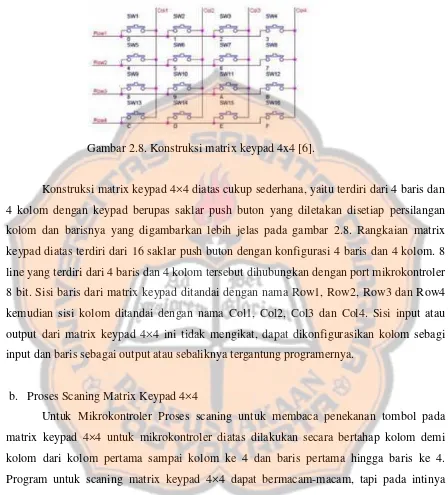
Gambar 2.8. Konstruksi matrix keypad 4x4 [6].
Konstruksi matrix keypad 4×4 diatas cukup sederhana, yaitu terdiri dari 4 baris dan 4 kolom dengan keypad berupas saklar push buton yang diletakan disetiap persilangan kolom dan barisnya yang digambarkan lebih jelas pada gambar 2.8. Rangkaian matrix keypad diatas terdiri dari 16 saklar push buton dengan konfigurasi 4 baris dan 4 kolom. 8 line yang terdiri dari 4 baris dan 4 kolom tersebut dihubungkan dengan port mikrokontroler 8 bit. Sisi baris dari matrix keypad ditandai dengan nama Row1, Row2, Row3 dan Row4 kemudian sisi kolom ditandai dengan nama Col1, Col2, Col3 dan Col4. Sisi input atau output dari matrix keypad 4×4 ini tidak mengikat, dapat dikonfigurasikan kolom sebagi input dan baris sebagai output atau sebaliknya tergantung programernya.
b. Proses Scaning Matrix Keypad 4×4
Untuk Mikrokontroler Proses scaning untuk membaca penekanan tombol pada matrix keypad 4×4 untuk mikrokontroler diatas dilakukan secara bertahap kolom demi kolom dari kolom pertama sampai kolom ke 4 dan baris pertama hingga baris ke 4. Program untuk scaning matrix keypad 4×4 dapat bermacam-macam, tapi pada intinya sama.
Misal kita asumsikan keyapad aktif LOW (semua line kolom dan baris dipasang resistor pull-up) dan dihubungkan ke port mikrokontroler dengan jalur kolom adalah jalur input dan jalur baris adalah jalur output maka proses scaning matrix keypad 4×4 diatas dapat dituliskan sebagai berikut:
yang lain kemudian membaca data baris, misal tombol SW1 ditekan maka data baris pertama (Row1) akan LOW sehingga data baris yang dibaca adalah 0111, atau tombol yang ditekan tombol SW5 maka data pada baris ke 2 akan LOW sehingga data yang terbaca 1011, atau tombol SW9 yang ditekan sehingga data yang terbaca 1101, atau tombol SW13 yang ditekan maka data yang dibaca adalah 1110 dan atau tidak ada tombol pada kolom pertama yang di tekan maka data pembacaan baris akan 1111.
2. Mengirimkan logika Low untuk kolom 2 (Col2) dan logika HIGH untuk kolom yang lain kemudian membaca data baris, misal tombol SW1 ditekan maka data baris pertama (Row1) akan LOW sehingga data baris yang dibaca adalah 0111, atau tombol yang ditekan tombol SW5 maka data pada baris ke 2 akan LOW sehingga data yang terbaca 1011, atau tombol SW9 yang ditekan sehingga data yang terbaca 1101, atau tombol SW13 yang ditekan maka data yang dibaca adalah 1110 dan atau tidak ada tombol pada kolom pertama yang di tekan maka data pembacaan baris akan 1111.
3. Mengirimkan logika Low untuk kolom 3 (Col3) dan logika HIGH untuk kolom yang lain kemudian membaca data baris, misal tombol SW1 ditekan maka data baris pertama (Row1) akan LOW sehingga data baris yang dibaca adalah 0111, atau tombol yang ditekan tombol SW5 maka data pada baris ke 2 akan LOW sehingga data yang terbaca 1011, atau tombol SW9 yang ditekan sehingga data yang terbaca 1101, atau tombol SW13 yang ditekan maka data yang dibaca adalah 1110 dan atau tidak ada tombol pada kolom pertama yang di tekan maka data pembacaan baris akan 1111.
4. Mengirimkan logika Low untuk kolom 4 (Col4) dan logika HIGH untuk kolom yang lain kemudian membaca data baris, misal tombol SW1 ditekan maka data baris pertama (Row1) akan LOW sehingga data baris yang dibaca adalah 0111, atau tombol yang ditekan tombol SW5 maka data pada baris ke 2 akan LOW sehingga data yang terbaca 1011, atau tombol SW9 yang ditekan sehingga data yang terbaca 1101, atau tombol SW13 yang ditekan maka data yang dibaca adalah 1110 dan atau tidak ada tombol pada kolom pertama yang di tekan maka data pembacaan baris akan 1111.
scaning tersebut akan menghasilkan data penekanan tiap-tiap tombol sebagai berikut: SW1 = 0111 0111 SW9 = 0111 1101
SW2 = 1011 0111 SW10 = 1011 1101 SW3 = 1101 0111 SW11 = 1101 1101 SW4 = 1110 0111 SW12 = 1110 1101 SW5 = 0111 1011 SW13 = 0111 1110 SW6 = 1011 1011 SW14 = 1011 1110 SW7 = 1101 1011 SW15 = 1101 1110 SW8 = 1110 1011 SW16 = 1110 1110
Data port mikrokontroler, misalkan pada SW2 = 1011 0111 tersebut terbagi dalam nible atas dan nible bawah dimana data nible atas (1011) merupakan data yang kita kirimkan sedangkan data nible bawah (0111) adalah data hasil pembacaan penekanan tombol keypad SW2 pada proses scaning matrix keypad 4×4 diatas.
2.5.
CodeVision AVR Eval
CodeVision AVR C Compiler (CVAVR) merupakan compiler bahasa C untuk AVR, compiler ini cukup memadai untuk belajar AVR, karena selain mudah penggunaannya, juga didukung berbagai fitur yang sangat membantu dalam pembuatan software untuk keperluan pemrograman AVR[7].
CVAVR ini dapat berjalan di bawah system operasi Windows 9x, Me, NT 4, 2000, dan XP. CVAVR ini dapat mengimplementasikan hampir semua instruksi bahasa C yang sesuai dengan arsitektur AVR, bahkan terdapat beberapa unggulan tambahan untuk memenuhi keunggulan spesifik dari AVR. Hasil kompilasi objek CVAVR bisa digunakan sebagai source degub dengan AVR Studio debugger dari ATMEL.
Selain pustaka standar bahasa C, CVAVR juga menyediakan pustaka tambahan yang sangat membantu pemrograman AVR, yaitu:
a. Alphanumeric LCD modules b. Phillips I2C bus
c. National Semiconductor LM75 Temperature Sensor
d. Phillips PCF8563, PCF8583, Maxim/Dallas Semiconductor DS1302 and DS1307 Real Time Clock
e. Maxim/Dallas Semiconductor 1 Wire Protocol
g. Maxim/Dallas Semiconductor DS1621 Thermometer/Thermostat h. Maxim/Dallas Semiconductor DS2430 and DS2433 EEPROMs i. SPI
j. Power Management k. Delays
l. Gray Code conversion
CVAVR juga memiliki program generator yang memungkinkan kita membuat program dengan cepat
2.6.
Motor Servo
Motor servo adalah sebuah motor DC yang dilengkapi rangkaian kendali dengan sistem closed feedback yang terintegrasi dalam motor tersebut [8]. Pada motor servo posisi putaran sumbu (axis) dari motor akan diinformasikan kembali ke rangkaian kontrol yang ada di dalam motor servo.
[image:36.595.86.525.172.576.2]a. Contoh Motor Servo
Gambar 2.9 Contoh Motor Servo [8]
b. Konstruksi Motor Servo Motor
Gambar 2.10. Kontruksi Motor Servo [8]
Servo adalah motor yang mampu bekerja dua arah (CW dan CCW) dimana arah dan sudut pergerakan rotornya dapat dikendalikan dengan memberikan variasi lebar pulsa (duty cycle) sinyal PWM pada bagian pin kontrolnya. Kontruksi mototr servo secara gamblang terdapat pada gambar 2.10.
c. Jenis Motor Servo
1. Motor Servo Standar 180°
Motor servo jenis ini hanya mampu bergerak dua arah (CW dan CCW) dengan defleksi masing-masing sudut mencapai 90° sehingga total defleksi sudut dari kanan–tengah–kiri adalah 180°.
2. Motor Servo Continuous Motor
Servo jenis ini mampu bergerak dua arah (CW dan CCW) tanpa batasan defleksi sudut putar (dapat berputar secara kontinyu). Pulsa Kontrol Motor Servo Operasional motor servo dikendalikan oleh sebuah pulsa selebar ± 20 ms, dimana lebar pulsa antara 0.5 ms dan 2 ms menyatakan akhir dari range sudut maksimum. Apabila motor servo diberikan pulsa dengan besar 1.5 ms mencapai gerakan 90°, maka bila kita berikan pulsa kurang dari 1.5 ms maka posisi mendekati 0° dan bila kita berikan pulsa lebih dari 1.5 ms maka posisi mendekati 180°.
3. Pulsa Kendali Motor Servo
sinyal PWM dengan frekuensi 50 Hz. Dimana pada saat sinyal dengan frekuensi 50 Hz tersebut dicapai pada kondisi Ton duty cycle 1.5 ms, maka rotor dari motor akan berhenti tepat di tengah-tengah (sudut 0°/ netral). Pada saat Ton duty cycle dari sinyal yang diberikan kurang dari 1.5 ms, maka rotor akan berputar ke berlawanan arah jarum jam (Counter Clock wise, CCW) dengan membentuk sudut yang besarnya linier terhadap besarnya Ton duty cycle, dan akan bertahan diposisi tersebut. Dan sebaliknya, jika Ton duty cycle dari sinyal yang diberikan lebih dari 1.5 ms, maka rotor akan berputar searah jarum jam (Clock Wise, CW) dengan membentuk sudut yang linier pula terhadap besarnya Ton duty cycle, dan bertahan diposisi tersebut.
2.7.
Volume Bangun Ruang
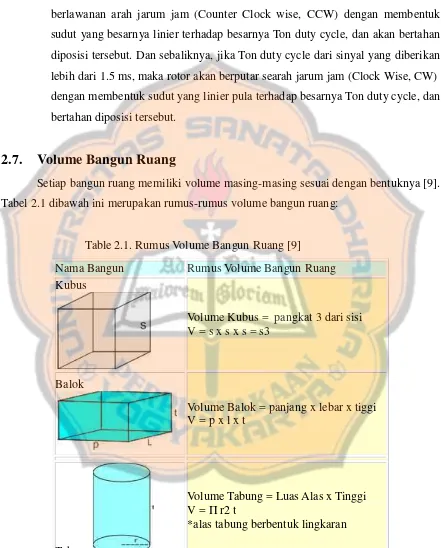
[image:38.595.84.525.147.695.2]Setiap bangun ruang memiliki volume masing-masing sesuai dengan bentuknya [9]. Tabel 2.1 dibawah ini merupakan rumus-rumus volume bangun ruang:
Table 2.1. Rumus Volume Bangun Ruang [9]
Nama Bangun Rumus Volume Bangun Ruang Kubus
Volume Kubus = pangkat 3 dari sisi V = s x s x s = s3
Balok
Volume Balok = panjang x lebar x tiggi V = p x l x t
Tabung
Volume Tabung = Luas Alas x Tinggi V =Π r2t
Table 2.1 (Lanjutan) Rumus Volume Bangun Ruang [9] Nama Bangun Volume Bangun Ruang
Kerucut
Volume Kerucut = 1/3 x Luas Alas x Tinggi
V = 1/3Πr2t
*alas tabung berbentuk lingkaran
Prisma
Volume Prisma = Luas Alas* x Tinggi *Tergantung Jenis Alasnya
Jika Prisma segitiga (alas segitiga) V = 1/2 at x Tinggi Prisma
Jika Segi Empat (alas persegi) V= s2 x Tinggi Prisma Jika Alas segi lima maka
menggunakan luas segi lima, jika persegi panjang menggunakan luas persegi panjang.
Limas
Volume Limas = 1/3 x Luas Alas*x Tinggi
*Tergantung Jenis Alasnya, sama seperti pada volume prisma
2.8.
Solenoid
Solenoid adalah salah satu jeniskumparanterbuat darikabelpanjang yang dililitkan secara rapat dan dapat diasumsikan bahwapanjangnya jauh lebih besar daripadadiameternya [10]. Dalam kasus solenoid ideal, panjang kumparan adalahtak hinggadan dibangun dengan kabel yang saling berhimpit dalam lilitannya, dan medan magnetdi dalamnya adalah seragam dan paralel terhadap sumbu solenoid.
Kuat medan magnet untuk solenoid ideal adalah:
(2.1) di mana:
adalah kuat medan magnet,
[image:39.595.83.516.89.618.2]adalah kuatarusyang mengalir, adalah jumlah lilitan.
Jika terdapat batangbesidan ditempatkan sebagian panjangnya di dalam solenoid, batang tersebut akan bergerak masuk ke dalam solenoid saat arus dialirkan. Hal ini dapat dimanfaatkan untuk menggerakkan tuas, membuka pintu, atau mengoperasikanrelai.
2.9.
Motor DC
Motor DC adalah motor listrik yang memerlukan suplai tegangan arus searah pada kumparan medan untuk diubah menjadi energi gerak mekanik. Kumparan medan pada motor dc disebut stator (bagian yang tidak berputar) dan kumparan jangkar disebut rotor (bagian yang berputar). Motor arus searah, sebagaimana namanya, menggunakan arus langsung yang tidak langsung/direct-unidirectional. Motor DC memiliki 3 bagian atau komponen utama untuk dapat berputar sebagai berikut.
a. Bagian Atau Komponen Utama Motor DC 1. Kutub medan.
Motor DC sederhana memiliki dua kutub medan: kutub utara dan kutub selatan. Garis magnetik energi membesar melintasi ruang terbuka diantara kutub-kutub dari utara ke selatan. Untuk motor yang lebih besar atau lebih komplek terdapat satu atau lebih elektromagnet.
2. Current Elektromagnet atau Dinamo.
Dinamo yang berbentuk silinder, dihubungkan ke as penggerak untuk menggerakan beban. Untuk kasus motor DC yang kecil, dinamo berputar dalam medan magnet yang dibentuk oleh kutub-kutub, sampai kutub utara dan selatan magnet berganti lokasi.
3. Commutator.
Komponen ini terutama ditemukan dalam motor DC. Kegunaannya adalah untuk transmisi arus antara dinamo dan sumber daya.
Keuntungan utama motor DC adalah sebagai pengendali kecepatan, yang tidak mempengaruhi kualitas pasokan daya. Motor ini dapat dikendalikan dengan mengatur:
a. Tegangan dinamo – meningkatkan tegangan dinamo akan meningkatkan kecepatan
b. Arus medan–menurunkan arus medan akan meningkatkan kecepatan.
dalam persamaan berikut:
Gaya Elektromagnetik (E):
(2.2) Torque (T) :
(2.3) Dimana:
E =gaya elektromagnetik yang dikembangkan pada terminal dinamo (volt)
Φ = flux medan yang berbanding lurus dengan arus medan
N = kecepatan dalam RPM (putaran per menit) T = torque electromagnetik
Ia = arus dinamo
K = konstanta persamaan
2.10. Buzzer
[image:41.595.86.527.80.615.2]Buzzer [12] adalah sebuah komponen elektronika yang berfungsi untuk mengubah getaran listrik menjadi getaran suara. Pada dasarnya prinsip kerja buzzer hampir sama dengan loud speaker, jadi buzzer juga terdiri dari kumparan yang terpasang pada diafragma dan kemudian kumparan tersebut dialiri arus sehingga menjadi elektromagnet, kumparan tadi akan tertarik ke dalam atau keluar, tergantung dari arah arus dan polaritas magnetnya, karena kumparan dipasang pada diafragma maka setiap gerakan kumparan akan menggerakkan diafragma secara bolak-balik sehingga membuat udara bergetar yang akan menghasilkan suara. Buzzer biasa digunakan sebagai indikator bahwa proses telah selesai atau terjadi suatu kesalahan pada sebuah alat (alarm).
23
Bab III
[image:42.595.83.510.89.715.2]Rancangan Penelitian
Gambar 3.1. Rancangan Oven
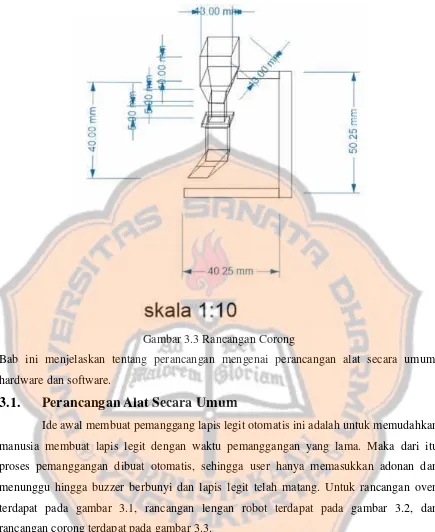
Gambar 3.3 Rancangan Corong
Bab ini menjelaskan tentang perancangan mengenai perancangan alat secara umum, hardware dan software.
3.1.
Perancangan Alat Secara Umum
Ide awal membuat pemanggang lapis legit otomatis ini adalah untuk memudahkan manusia membuat lapis legit dengan waktu pemanggangan yang lama. Maka dari itu proses pemanggangan dibuat otomatis, sehingga user hanya memasukkan adonan dan menunggu hingga buzzer berbunyi dan lapis legit telah matang. Untuk rancangan oven terdapat pada gambar 3.1, rancangan lengan robot terdapat pada gambar 3.2, dan rancangan corong terdapat pada gambar 3.3.
Perancangan secara umumnya adalah adonan lapis legit diletakkan di wadah adonan yang telah disediakan. Kemudian banyaknya lapisan dari lapis legit diatur oleh user yang tertampil di dalam lcd, kemudian banyaknya lapisan diatur dengan menekan
keypad, apabila telah selesai mengatur banyak lapisan, maka user bisa menekan “OK”
pada keypad.
Pemanggang otomatis mulai bekerja. Pertama dengan mengeluarkan Loyang yang sudah dimasukkan selama 5 menit. Kemudian katup on off mulai terbuka selama 5 detik dan menutup kembali. Lengan robot memanjang ke adonan untuk meratakan lapisan pertama. Loyang dimasukkan kembali kedalam oven, bersamaan dengan menutupnya pintu oven. Lima menit kemudian pintu oven terbuka. Kemudian Loyang keluar dari oven dan lengan robot menekan adonan didalam loyang. Katup on off membuka selama kurang lebih 5 detik untuk mengalirkan adonan dan menutup kembali setelahnya. Lengan robot diturunkan ke Loyang untuk meratakan adonan, dan dinaikkan kembali. Kemudian Loyang masuk kembali kedalam oven bersamaan dengan pintu oven yang menutup, demikian seterusnya hingga adonan habis. Ketika adonan habis, maka pemanggangan terakhir dilakukan selama kurang lebih 10 menit. Setelah 10 menit , buzzer akan berbunyi menandakan bahwa lapis telah matang seluruhnya. Buzzer akan mati apabila tombol reset ditekan atau tombol off ditekan.
3.2.
Perancangan Alat Secara
Hardware
Perancangan secara hardware ini meliputi perancangan pada rangkaian minimum system ATMega 8535, LCD, keypad, wadah adonan lapis legit, oven dengan pintu otomatis, dan lengan robot.
3.2.1. Rangkaian Minimum System Mikrokontroler ATMega 8535
Rangkaian minimum system berfungsi sebagai I/O untuk mengolah data dari keypad dan mengontrol katup on off, pintu oven otomatis, dan lengan robot. Mikrokontroler membutuhkan system minimum yang terdiri dari rangkaian eksternal, yaitu rangkaian osilator dan rangkaian reset.
Gambar 3.4 Rangkaian Osilator
[image:45.595.86.524.245.582.2]Gambar 3.5. menunjukkan rangkaian reset mikrokontroler ATMega 8535. Rangkaian reset bertujuan untuk memaksa proses kerja pada mikrokontroler diulang dari awal. Jika tombol reset ditekan, maka pin reset akan mendapat input logika rendah, sehingga mikrokontroler akan mengulang proses eksekusi program dari awal. Pada perancangan, rangkaian reset digunakan resistor sebesar 10kΩ dan kapasitor sebesar 10µF.
Gambar 3.5. Rangkaian Reset
Berikut ini adalah tabel penggunaan port: Tabel 3.1 Tabel penggunaan port port
Dibawah ini merupakan gambar rangkaian minimum system mikrokontroler ATMega8535
Gambar 3.6. Rangkaian Minimum Sistem Mikrokontroler ATMega8535
3.2.2. Rangkaian LCD
LCD digunakan untuk menampilkan data output dari Keypad. Data yang tertampil berupa berapa banyaknya lapisan yang diinginkan, LCD yang digunakan adalah LCD 16x2 yang memiliki tipe LMB162A. LCD 16x2 bertipe ini memungkinkan pemrogram untuk mengoperasikan komunikasi data secara 8 bit atau 4 bit. Dalam perancangan ini, mode yang digunakan untuk menuliskan data ke LCD digunakan sebanyak 4 bit (mode nibble). PortD.4, PortD.5, PortD.6, dan PortD.7 digunakan sebagai port data, sedangkan PortD.0, PortD.1, PortD.2 digunakan sebagai port pengatur interface LCD.
Berdasarkan datasheet tegangan kontras (Vcc LCD) maksimum sebesar 5VDC,
sehingga dalam perancangan digunakan sebuah resistor variabel sebesar 10KΩ yang
Gambar 3.7 Rangkaian LCD
3.2.3. Rangkaian Keypad
Keypad yang digunakan yakni keypad dengan matriks 4x4. Keypad berfungsi sebagai masukan nilai tegangan yang diinginkan oleh user. Port yang digunakan pada mikrokontroler untuk keypad adalah PortC.0 sampai PortC.7. PortC.4 sampai PortC.7 atau port baris digunakan sebagai input, sedangkan PortC.0 sampai PortC.3 atau port kolom digunakan sebagai output.
3.2.4. Wadah adonan lapis legit.
Wadah adonan lapis legit (Gambar 3.3) ini terdiri dari LCD, keypad, minimum system, dan katup on off solenoid. LCD, keypad dan minimum system telah dijabarkan di pembahasan sebelumnya. Jadi yang menjadi fokus di subbab ini adalah katup on off solenoid. Gambar 3.9 merupakan mode katup solenoid aktif dan menutup.
Gambar 3.9 Mode on off solenoid Cara kerja katup on off solenoid adalah:
a. Katup terbuka selama 5 detik (Mode 2).
Katup terbuka selama 5 detik dengan tujuan untuk membuat adonan yang berada didalam wadah berpindah tempat ke loyang di dalam oven.
Dilihat dari kekentalan dan diameter corong nya sekitar 2 cm pada pangkal wadah sebelum katup solenoid, dan 3cm setelah katup solenoid, maka adonan yang tertuang sebanyak 180 cc. Perkiraan 180 cc ini dihitung berdasarkan pada setiap
b. Katup menutup kembali (Mode1).
Katup menutup kembali sampai adonan yang telah matang siap untuk dituangkan kembali oleh adonan yang masih mentah.
3.2.5. Oven dengan pintu otomatis
otomatis saat awal mulai memanggang, meratakan adonan yang sudah dituangkan, dan ketika sudah matang, serta menutup secara otomatis ketika adonan sudah diratakan didalam loyang.
Gambar 3.10 Mode Oven Dari gambar 3.10, bisa dijabarkan sebagai berikut: a. Mode Oven menutup (Mode 1)
Dari gambar 3.10 cukup jelas, bahwa oven dalam kondisi tertutup pintunya dan Loyang didalam oven. Loyang diletakkan diatas konveyor. Mode 1 terjadi saat pemanasan Loyang pada permulaan, dan pada saat pematangan adonan lapis per lapis. b. Mode Oven membuka (Mode 2)
Dari gambar 3.10, Oven dalam kondisi pintu terbuka dan Loyang diluar oven. Mode 2 terjadi saat adonan sudah matang dan siap dituangkan adonan baru, dan saat adonan sudah matang sepenuhnya dan tidak ada lagi adonan yang tersisa.
3.2.6. Lengan Robot
robot pada umumnya, yakni dengan mengatur overflow timernya dengan memainkan PWM, maka akan dihasilkan gerakan masuk ke dalam oven yang diinginkan.
Berikut ini merupakan detil gerakan dari servo yang dimplementasikan dalam lengan robot berikut ini.
Gambar 3.11 Gerakan Motor Servo Berikut ini penjelasan dari gambar 3.11:
a. Mode 1
Mode ini menggerakkan motor servo dengan nilai motor servo pangkal = -90 ̊ , servo tengah =-90 ̊, dan servo ujung = 0 ̊. Untuk detil gerakan servo ujung yang bernilai 0 ̊
akan dijelaskan di gambar berikutnya. Mode ini dijalankan saat Loyang dikeluarkan dari oven untuk menekan adonan yang sudah matang dan meratakan adonan mentah yang baru dituangkan dari wadah.
b. Mode 2
Mode ini menggerakkan motor servo dengan nilai motor servo pangkal = 0 ̊ , servo tengah =-90 ̊ , dan servo ujung = 0 ̊ . mode ini merupakan mode transisi antara mode 1
dan mode 3. Mode ini juga dijalankan saat adonan sudah diratakan dan Loyang siap masuk kedalam oven.
c. Mode 3
Mode ini menggerakkan motor servo dengan nilai motor servo pangkal = 0 ̊ , servo tengah = 0 ̊ , dan servo ujung = 0 ̊ . Mode ini dijalankan bersamaan dengan Loyang
Untuk servo ujung, penggambarannya seperti gambar 3.12 berikut:
Gambar 3.12. Mode Motor Servo Ujung
Ini merupakan pemodelan sederhana dengan satu sisi lempengan, karena dengan pemodelan asli yang menggunakan rangka lempengan alumunium dengan 4 sisi, maka akan menyulitkan dalam penjabaran detail gerakan motor servo. Motor servo yang ideal diinginkan yakni pada mode 2, dengan besaran sudut awal yakni 0 ̊ . Pada mode pengadukan, gerakan yang diinginkan yakni gerakan dari mode 4 , 1 , 2 , 3 , 4 , kemudian kembali menjadi 4 , 3 , 2 , 1 , 4 . Dengan detil nilai motor servo yakni-180 ̊,
-90 ̊ , 0 ̊ , 90 ̊ , 180 ̊ , kemudian kembali menjadi 180 ̊, 90 ̊ , 0 ̊ ,-90 ̊ ,-180 ̊.
3.3.
Perancangan Alat Secara
Software
Perancangan alat secara software maksudnya adalah perancangan yang dilakukan dengan menyusun proses kerja dari alat tersebut dengan cara diprogram. Program ini sendiri mengacu pada diagram alir yang dibuat sebelumnya. Diagram alir ini berfungsi
sebagai “peta” bagi alat, agar ketika memprogram alat tersebut, bisa lebih terarah cara
kerjanya.
3.3.1.
Diagram Alir Utama Sistem
Gambar 3.13 merupakan diagram alir dari sistem . Diagram alir ini menunjukkan cara kerjanya. Pertama, masukkan input keypad untuk menentukan banyaknya lapisan yang diinginkan. Apabila jumlah lapisan yang diketik lebih dari 10, maka akan tampil
“Salah, nilai maksimum lapisan tidak boleh lebih dari 10”. Bila jumlah lapisan ≤ 10, maka
Setelah 5 menit(simulasi 5 detik) , pintu oven terbuka bersamaan dengan loyang yang keluar. Apakah saat loyang keluar ini merupakan lapisan pertama. Jika tidak, maka lengan robot akan menekan adonan yang sudah matang . Jika iya, maka system langsung mengaktifkan solenoid selama 5 detik untuk mengalirkan adonan. Kemudian solenoid akan menutup dan dilanjutkan dengan lengan robot yang mengaduk adonan. Setelah itu, lengan robot diangkat dan loyang dimasukkan kembali kedalam oven bersamaan dengan tertutupnya pintu oven. Adonan mulai dipanggang selama 5 menit (simulasi 5 detik). Apakah lapisan sudah mencapai set point yang ditentukan user. Bila tidak, maka system mengulang kembali untuk mengeluarkan loyang dari dalam oven, dan demikian seterusnya hingga mencapai set point nya. Bila sudah, maka loyang juga keluar dan lengan robot menekan adonan yang paling atas. Setelah itu buzzer menyala disertai dengan tampilan
“SIAP”. Apakah ingin membuat lapis lagi atau tidak. Bila ya, maka program akan
mengulang dari awal lagi. Bila tidak, maka program selesai.
3.3.2. Diagram Alir Lengan Robot ( Motor Servo)
[image:54.595.84.528.279.727.2]Didalam diagram alir system, ada subrutin lengan robot. Dimaksudkan adanya subrutin karena untuk memudahkan pergerakan lengan robot, dan memudahkan pembagian pemrogramannya. Gambar 3.14 merupakan diagram alir lengan robotnya.
Dari diagram alir gambar 3.14 dapat dijelaskan bahwa didalam program lengan robot ini ada 2 mode, yakni mode tekan dan mode aduk, dimana saat mode aduk yang
aktif, maka nilai servo tengah = 90 ̊ , servo pangkal = 90 ̊ , dan servo ujung = 360 ̊ berputar
selama 2 kali. Namun saat mode tekan yang aktif, nilai servo tengah = 90 ̊ , servo pangkal = 90 ̊ , dan servo ujung = 0 ̊. Ini hanya berlaku untuk lapisan pertama. Untuk lapisan kedua,
[image:55.595.83.512.231.680.2]diatur derajatnya berdasarkan inisialisasi PWM. Rentang PWM hyang dipakai yakni antara 20 des sampai 100 des dengan toleransi nilai 1 sampai 4 des. Berikut merupakan hubungan nilai PWM dengan besaran derajat motor servo.
Tabel 3.2Tabel Hubungan Derajat Motor Servo 180 ̊ dan PWM
No Motor Servo ( ̊ ) PWM (des) 1 0 20 2 10 24.5 3 20 29 4 30 33.5 5 40 38 6 50 42.5 7 60 47 8 70 51.5 9 80 56 10 90 60.5 11 100 65 12 110 69.5 13 120 74 14 130 78.5 15 140 83 16 150 87.5 17 160 92 18 170 96.5 19 180 101
37
BAB IV
HASIL DAN PEMBAHASAN
Bab ini berisi tentang pengujian sistem pengenalan, gambar fisik hardware yang dibuat, hasil pengujian sistem, pembahasan data yang diperoleh. Pengujian sistem perlu dilakukan untuk mengetahui apakah suatu sistem telah bekerja dan berjalan sesuai perancangan. Data-data hasil pengujian sistem yang telah dirancang menunjukkan bahwa tidak semua bagian dari sistem berjalan sesuai perancangan. Analisa terhadap proses kerja sistem dapat digunakan untuk menarik penyimpulan dari apa yang diperoleh dari analisa.
4.1 Hasil Implementasi Alat
[image:56.595.82.528.198.706.2]Implementasi alat pemanggang lapis legit otomatis berbasis mikrokontroler terdiri dari Minimum Sistem Mikrokontroler ATmega16, keypad, LCD, Motor DC 12V untuk menggerakkan pintu dan konveyor, empat buah servo 180° yang diletakkan di bagian pangkal dan tengah lengan robot masing-masing satu buah, dan diletakkan di alas adonan dan \di mulut corong adonan masing masing satu buah, motor DC 5v yang diletakkan di ujung lengan robot dan power supply 12v dan 5v untuk menggerakkan semua alat yang ada di sistem. Berikut adalah penampakan implementasi alat yang dimaksud.
4.2 Hasil Perancangan Perangkat Keras
Hasil perancangan perangkat keras terdiri dari oven dengan pintu otomatis dan konveyor yang saling berkaitan, corong adonan yang memiliki servo di bagian alas corong dan pembatas corong (yang awalnya menggunakan solenoida), keypad yang disertai dengan LCD Minsis, dan lengan robot yang terdiri dari dua buah servo yang berada di pangkal dan lengan yang disertai motor dc 5v. Namun, dalam pengujian yang dilakukan, ternyata mengalami malfungsi dari sistem keseluruhan. Oleh karena itu, akan dijabarkan subsistem-subsistem dari sistem utama tersebut.
4.2.1. Wadah Adonan
[image:57.595.86.527.308.725.2]Terdiri dari dua buah servo dengan fungsi servo 1 (gambar 4.2) sebagai motor alas untuk membuat posisi adonan agar tidak terhalang oleh terbukanya pintu oven otomatis (yang awalnya berfungsi), dan servo 2 (gambar 4.3) sebagai katup penghalang adonan supaya lebih terkontrol adonan yang masuk maupun keluar. Pengaturan sudut yang dinginkan yakni untuk servo 1 sebesar 180° dan 90° , sedangkan untuk servo 2 yakni sebesar 0° dan 67° (untuk 67° merupakan nilai sudut real yang pas untuk membuka katup adonan secara sempurna bebas hambatan).
Port yang digunakan untuk pemrogramannya adalah Port D. Dibawah ini merupakan tabel penggunaan Port D untuk servo 1 dan 2.
Tabel 4.1. Penggunaan Port Minimum Sistem pada wadah adonan
Saluran Kegunaan
[image:58.595.85.510.148.572.2]PORTD.2 Untuk pengaturan sudut katup adonan PORTD.4 Untuk pengaturan sudut alas adonan
Gambar 4.3. Servo Alas wadah adonan
4.2.2. Minimum Sistem, LCD dan Keypad
Untuk LCD, port yang digunakan untuk diberi program adalah Port D. Untuk Keypad, port yang digunakan yakni Port C. Dibawah ini merupakan tabel penggunaan masing-masing port untuk keypad dan LCD
Tabel 4.2 Penggunaan Port untuk LCD dan Keypad
Saluran Kegunaan
PORTD.0 Untuk RS LCD PORTD.1 Untuk RW LCD PORTD.2 Untuk Enable LCD PORTD.4 Untuk D4 LCD PORTD.5 Untuk D5 LCD PORTD.6 Untuk D6 LCD PORTD.7 Untuk D7 LCD
PORTC.0 s.d PORT C.7 Untuk pengaturan input dari keypad
4.2.3. Lengan Robot
Terdiri dari dua buah servo (gambar 4.5.) yang berfungsi sebagai pengaduk adonan yang telah dituangkan ke dalam loyang, dan Motor DC 5V yang dihubungkan dengan IC L298 (gambar 4.6.) yang berfungsi untuk meratakan adonan yang telah dituang ke dalam loyang, agar kue tidak menggumpal dan becek. Servo diatur untuk bergerak 90° dan 180°, baik itu servo 1 maupun servo 2. Motor DC diatur untuk berputar searah jarum jam selama waktu tertentu, dan berlawanan arah jarum jam dalam waktu tertentu pula (dalam pengertian bahwa waktu yang diatur untuk berputar baik itu searah jarum jam maupun berlawanan arah jarum jam dibuat sama. Sebagai contoh apabila waktu yang digunakan untuk berputar searah jarum jam adalah 5 detik, maka waktu yang digunakan untuk berputar berlawanan arah jarum jam yaitu 5 detik juga).
[image:60.595.85.524.210.726.2]Port yang digunakan untuk pengaturan pergerakan motor servo dan motor dc yakni Port D. Dibawah ini merupakan tabel saluran port yang digunakan untuk mengatur pergerakan motor servo dan motor dc.
Tabel 4.3. Penggunaan Port untuk Servo dan Motor Dc pada Lengan Robot Saluran Kegunaan
PORTD.2 Untuk mengatur perputaran sudut Servo 2 PORTD.3 UntukINPUT1 Motor Dc
PORTD.4 Untuk mengatur perputaran sudut Servo 1 PORTD.5 UntukINPUT2 Motor Dc
PORTD.6 Untuk Enable Motor Dc
Gambar 4.6. IC L298
4.2.4. Oven
Hanya terdiri dari motor dc 12V (gambar 4.8) dengan tambahan IC L298 (gambar4.6). Cara kerjanya yakni ketika konveyor keluar, maka bersamaan dengan itu pintunya membuka. Demikian pula sebaliknya. Oven(gambar 4.7) disini merupakan bagian utama dari sistem yang menentukan apakah nantinya sistem bekerja optimal atau tidak. Apabila tidak bekerja, maka mengganggu subsistem yang lainnya. Motor dc bekerja dengan cara berputar berlawanan arah jarum jam untuk membuat konveyor bergerak keluar dan pintu otomatis terbuka.input 12v didapat dari trafo yang sudah diubah tegangannya dari AC ke DC.
Port yang digunakan untuk menggerakkan motor DC ini adalah Port D. Dibawah ini merupakan saluran dari port D yang dipakai ntuk menggerakkan motor DC tersebut.
Tabel 4.4. Penggunaan Port untuk menggerakkan motor DC 12V
Saluran Kegunaan
Gambar 4.7. Oven (Tampak Samping)
4.3. Hasil Perancangan dan Pembahasan Perangkat Lunak
Pemrograman mengenai keseluruhan alat terdapat dibagian lampiran. Pemrograman yang dilakukan dibuat dengan setiap alat dipisah antara satu program dengan program yang lain untuk melihat efektivitas alat, apakah sudah berfungsi secara optimal atau tidak.
4.3.1. Oven
Berikut ini merupakan listing program untuk oven (motor DC 12V)
Dari listing program diatas, yang ingin dilakukan yakni memutar motor DC 12v berlawanan arah jarum jam selama 3000ms, kemudian berhenti sejenak selama 5000ms, kemudian berputar kembali searah jarum jam selama 3000ms, kemudian berhenti lagi selama 5000 ms. Demikian seterusnya.
4.3.2. Lengan Robot
Berikut ini merupakan listing program untuk menggerakkan dua buah servo dan satu buah motor dc 5v.
#include <mega16.h> #include <delay.h> void main(void) { PORTA=0x00; DDRA=0x00; PORTB=0x00; DDRB=0x00; PORTC=0x00; DDRC=0x00; PORTD=0x00; DDRD=0xFF; while (1) { PORTD.0=1;
PORTD.2=1; PORTD.4=0; delay_ms(3000); PORTD.2=0; PORTD.4=0; delay_ms(5000); PORTD.2=0; PORTD.4=1; delay_ms(3000); PORTD.2=0; PORTD.4=0; delay_ms(5000); }
#include <mega16.h> #include <stdlib.h> #include <delay.h> #include <stdio.h> int e=0,gerak,gerak1;
Dari listing program diatas dapat dijelaskan bahwa yang ingin dilakukan adalah servo 1 bergerak 90°, kemudian servo 2 bergerak 90°. Setelah itu, servo 2 menuju ke 180°, dan dilanjutkan servo 1 menuju ke 180°. Setelah itu, enable L298 diaktifkan. Masukan ke L298 memutar Motor Dc berlawanan arah jarum jam selama 3000ms, kemudian berhenti selama 10000ms, dilanjutkan berputar searah jarum jam selama 3000ms, kemudian berhenti lagi selama 10000ms. Setelah itu, servo 1 kembali ke posisi awal 90° dan dilanjutkan ke servo 2 sebesar 90° juga.
4.3.3. Wadah Adonan
Berikut ini merupakan listing program untuk wadah adonan
#include <mega16.h> #include <stdlib.h> #include <delay.h> #include <stdio.h>
int e=0,gerakalas,geraksole;
interrupt [TIM0_OVF] void timer0_ovf_isr(void) { if(e==864){e=0;} else {e++;} if(e<=gerakalas){PORTD.4=1;} else {PORTD.4=0;} if(e<=geraksole){PORTD.2=1;} else {PORTD.2=0;} }
// Declare your global variables here
Dari listing program di atas, dapat dijabarkan bahwa servo alas adonan bergerak 90°, kemudian dilanjutkan oleh servo katup adonan sebesar 0°. Kemudian servo alas bergerak 180°, dilanjutkan servo katup adonan sebesar 67° dan kembali ke 0°. Akhirnya servo alas kembali lagi ke sudut 90°. Dan seterusnya.
4.3.4. LCD dan Keypad
Berikut ini merupakan listing program untuk LCD dan Keypad
while (1) { gerakalas=47; delay_ms(500); geraksole=16; delay_ms(500); gerakalas=77; delay_ms(500); geraksole=35; delay_ms(500); geraksole=16; delay_ms(500); gerakalas=47; delay_ms(500); } } #include <mega16.h> #include <stdlib.h> #include <stdio.h> #include <delay.h> #asm
Dari listing program di atas, dapat dijabarkan bahwa pada void keypad dilakukan proses scanning untuk mendapat masukan apa yang diinginkan. Kemudian terdapat logika yang nantinya akan dimasukkan ke dalam LCD yang menyatakan bahwa saat lapisan kurang dari atau sama dengan 10, maka input yang diinginkan akan langsung di tampilkan
di LCD dengan tampilan “Hasilnya = “. Namun, ketika input yang ditekan lebih dari 10, maka tampilan di LCDakan menjadi “Error” dan akan kembali lagi ke inputlapisan untuk di input ulang.
4.4 Pengujian Alat
Alat diujikan untuk melihat apakah hasil yang ingin diperoleh sudah sesuai dengan kenyataan atau tidak. Pengujian dilakukan dengan pengulangan sebanyak 10 kali untuk mendapatkan data yang sah dan bisa dipertanggungjawabkan keabsahannya.
4.4.1. Pengujian Oven (Motor DC 12V)
Pengujian dilakukan dengan mengunduh listing program ke dalam mikrokontroler yang ada di dalam minsis. Dari hasil unduhan didapatkan bahwa motor tidak bekerja sama sekali. Dugaan awalnya adalah kabelnya ada yang putus, namun setelah diganti kabel yang baru hasilnya tetap sama saja.
Kemudian dilakukan pengujian terhadap voltase yang mengalir ke dalam motor DC tersebut , dan dibawah ini merupakan hasil pengukurannya. \
Gambar 4.10. Hasil Keluaran dari Kaki Motor DC
Dari gambar 4.9 dan 4.10 diatas sebenarnya sudah jelas, bahwa output yang diinginkan sudah
![Gambar 2. 6 Status Register ATMega 8535 [4]](https://thumb-ap.123doks.com/thumbv2/123dok/780426.600144/30.595.84.532.87.597/gambar-status-register-atmega.webp)
![Gambar 2.7. Contoh Bentuk LCD (Liquid Cristal Display)[5]](https://thumb-ap.123doks.com/thumbv2/123dok/780426.600144/31.595.80.527.219.695/gambar-contoh-bentuk-lcd-liquid-cristal-display.webp)
![Gambar 2.9 Contoh Motor Servo [8]](https://thumb-ap.123doks.com/thumbv2/123dok/780426.600144/36.595.86.525.172.576/gambar-contoh-motor-servo.webp)
![Gambar 2.10. Kontruksi Motor Servo [8]](https://thumb-ap.123doks.com/thumbv2/123dok/780426.600144/37.595.86.524.86.728/gambar-kontruksi-motor-servo.webp)
![Table 2.1 (Lanjutan) Rumus Volume Bangun Ruang [9]](https://thumb-ap.123doks.com/thumbv2/123dok/780426.600144/39.595.83.516.89.618/table-lanjutan-rumus-volume-bangun-ruang.webp)
![Gambar 2.11. Buzzer [12]](https://thumb-ap.123doks.com/thumbv2/123dok/780426.600144/41.595.86.527.80.615/gambar-buzzer.webp)