Gerakan Non-linier Rolling Kapal di Gelombang Beraturan
(
Kajian Numerik
)
Wibowo. Harso. Nugroho
Marine Structural Monitoring / Hydroelasticity Group UPT - Balai Pengkajian Penelitian Hidrodinamika
BPP – Teknologi Abstract
In this paper a numerical mehod of fourth order Runge- Kutta is applied to solve a non linear rolling motion of a ship in a regular wave. The purpose of this application is to predict more accurately of the motion especially on the large angle rolling (>8o ). In this research the nonlinear coeficients restoring moment are derived from the stability curve of caraka jaya cargo ship. The results can be used to predict the maximum rolling amplitude of the ship in related to the ship wave heading () kapal and the wave excitation frequency.
Key words: rolling motion, nonlinear restoring moment, fourth order Runge- Kutta
PENDAHULUAN
Rolling adalah gerakan putar pada sumbu memanjang kapal merupakan salah satu gerakan yang dominan dari pada waktu kapal berada di laut bebas. Gerakan ini merupakan gerak osilasi yang dialami oleh kapal. Gerakan rolling ini mempunyai karateristik yang tidak menguntungkan bagi kapal yaitu; dapat menimbulkan stress tambahan bagi struktur kapal, bisa menimbulkan suasana yang tidak menyenangkan bagi penumpang maupun awak kapal, dapat juga meningkatkan resiko putusnya pengikatan muatan serta naiknya biaya pengoperasian kapal. Prediksi karateristik gerakan ini yang berdasarkan teori linier pada sudut – sudut kecil dari gerakan rolling sangat baik tetapi pada sudut – sudut besar sifat nonlinierlah yang mempengaruhi gerakan tersebut sehingga pendekatan secara linier sudah tak cocok lagi. Walaupun penyelesaian dari persamaan nonlinier tersebut lebih sulit tetapi hasil dari penyeleseaian tersebut merupakan kesimpulan akhir yang diinginkan dalam mempelajari ataupun mengamati gerakan rolling. Sesuai dengan teori linier bahwa momen yang bekerja secara tiba – tiba akan memperbesar amplitudo gerakan sesaat, tetapi dengan adanya damping maka
gerakan kapal akan kembali ke gerakan osilasi semula. Akan tetapi pengaruh dari nonlinier dapat memperbesar gejala di atas dimana momen pengembali(restoring moment) dapat membuat kapal terbalik. Tujuan dari penelitian ini adalah untuk menyelesaikan secara numerik persamaan gerakan rolling kapal di gelombang beraturan sehingga akibat buruk dari kejadian non-linier pada suatu hasil rekayasa kapal dapat dihindari.
TINJAUAN PUSTAKA
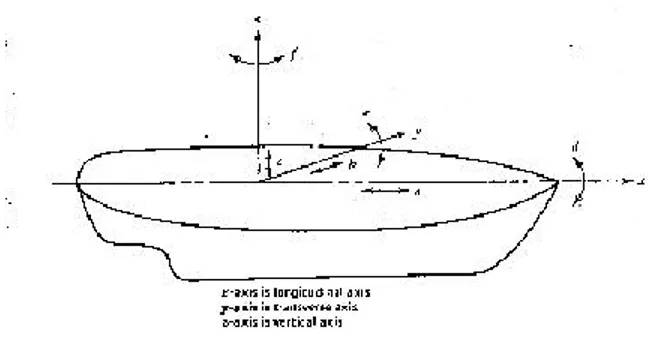
Sebuah kapal yang bergerak di laut bebas hampir selalu mengalami gerakan osilasi. Gerakan osilasi yang dialami kapal diperlihatkan pada Gambar 1 yang mana memperlihatkan 6 jenis gerakan yang mana terdiri dari 3 gerakan dilatasi dan 3 gerakan rotasi terhadap sumbu x, y, z.
Gambar 1. Enam gerakan kapal di laut lepas Mengacu pada Gambar 1 terlihat; a adalah gerakan surging yaitu gerak osilasi maju mundurnya kapal, b adalah gerakan swaying yaitu gerak osilasi kesamping kiri dan kanan kapal, c adalah gerakan heaving yaitu gerak osilasi naik turun kapal, d adalah gerakan rolling yaitu gerak osilasi angular badan kapal terhadap sumbu longitudinal kapal dari sisi kiri ke kanan, e adalah gerakan pitching yaitu gerak osilasi angular pada sumbu melintang kapal ( gerak angguk), f adalah gerakan yawing yaitu gerak osilasi angular badan kapal terhadap sumbu tegaknya. Pada penelitian ini gerakan yang dibahas adalah gerakan rolling karena beberapa sifat gerakan yang merugikan sepert yang dinyatakan pada bagian pendahuluan. Pada Gambar 1 terlihat bahwa gerakan rolling merupakan gerak osilasi angular badan kapal terhadap sumbu longitudinal. Gerakan rolling tersebut mempunyai persamaan umum sebagai berikut:
t M
t cb b
a
1
2
,
e ( 1 )Dimana besarnya sudut rolling ditulis dengan notasi dan turunan pertama terhadap waktu atau kecepatan sudutnya mempunyai notasi
dan percepatan sudutnya atau turunan kedua terhadap waktu bernotasi
, selanjutnya notasi a dipakai untuk menyatakan momen inersia massa total kapal yang mana merupakan fungsi dari frekuensi eksitasi, dan notasi b1 serta b2merupakan koefisien peredam (damping). Bentuk kuadrat dari kecepatan yang dikalikan oleh koefisien b2 ditulis dalam
bentuk karena apabila tanda dari
berubah maka bentuk kuadrat tersebut aka berubah tanda pula, keadaan ini mendukung sifat dari momen peredam yang dihasilkan selalu bergerak berlawanan dengan arah gerakan. Notasi c dipakai untuk menyatakan momen pengembali dan dapat ditulis sebagai berikut :
,
t
c
1
t
c
3
t
3
c
5
t
5
...
c
( 2 )Kemudian yang terakhir adalah notasi M yang menyatakan momen eksitasi, dan merupakan fungsi dari frekuensi eksitasi dan waktu. Ada empat kasus yang perlu dipertimbangkan dalam membicarakan gerakan rolling ; (1) persamaan gerakan linier apabila b2 = c3 = c5 = 0, dimana
koefisien a, b1 , c1 adalah konstan (2)
persamaan gerakan adalah linier untuk dampingnya tetapi nonlinier pada momen pengembalinya dengan koefisien konstan apabila b2 = 0, c1 , c3 , c5 bukan fungsi
waktu (3) persamaan gerakan adalah nonlinier untuk dampingnya tetapi linier pada momen pengembalinya apabila c3 = c5 = 0,
c1, bukan fungsi waktu (4) persamaan
gerakan adalah linier untuk dampingnya juga linier pada momen pengembalinya tetapi koefsiennya merupakan fungsi waktu apabila b2 = c3 = c5= 0, dan c1 adalah fungsi
waktu. Penelitian ini pembahasan dilakukan hanya pada kasus no 2 dengan alasan sebagai berikut; pada kasus no1 hasil perhitungan ntuk sudut – sudut rolling yang besar ( ≥ 80 ) sudah tak cocok lagi, pada
kasus no 3 beberapa penelitian menunjukkan bahwa pada angka froud ≥ 0,15, koefisien kuadrat dari damping mendekati angka nol, terutama pada jenis kapal – kapal dagang yang termasuk pada series 60, pada kasus no 4 disamping pemecahan persamaan differensial yang cukup sulit hasilnya juga hanya cocok pada sudut – sudut rolling yang kecil( ≤ 80 ), dengan pengetahuan tentang momen pengembali yang nonlinier prediksi dari kemungkinan kapal mengalami terbalik akan lebih tepat. Selanjutnya dengan kondisi
koefisien b2 = 0, c1 , c3 , c5 bukan fungsi
waktu maka persamaan ( 1 ) menjadi
e b c c c M
etI
xx cos 5 5 3 3 1
( 3 )Gambar2. Perhitungan jari – jari girasi rolling kapal
Penentuan koefisien – koefisien dari persamaan nonlinier di atas adalah sebagai berikut; pertama adalah momen inersia massa kapal
I
xx, yang merupakan fungsi frekuensi eksitasi akan tetapi pada penelitian ini dianggap konstan, maka:xx xx xx I I
I
k
k
k
xx xx xx g g
2 2 2 (4)Dimana ∆ adalah berat kapal, g merupakan percepatan grafitasi dan kxx adalah jari – jari
girasi kapal terhadap sumbu memanjang kapal, serta k’xx merupakan jari –jari girasi
tambahan terhadap sumbu memanjang kapal juga dan
k
xx
2disebut juga jari – jari girasi sebenarnya terhadap sumbu memanjang kapal. Untuk mendapatkan jari – jari girasi kapal kxx dilakukan perhitungan
dahulu momen inersia kapal terhadap sumbu memanjang kapal yang melalui titik berat kapal ( lihat Gambar 2). Jika kapal dibagi kedalam bentuk potongan – potongan kecil berat yang sesuai maka
r
I
xx dM i 2 =
z
y
i i dM 2 2 (5) Sehingga
k
y
z
I
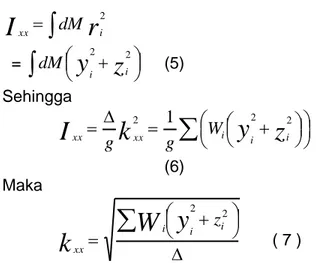
xx xx Wi i i g g 2 2 2 1 (6) Maka
2 2 i i i xxz
y
W
k
( 7 )Dimana; Wi adalah berat elemen yang ke i ,
yi adalah jarak melintang dari titik berat
elemen yang ke i ke sumbu rolling, dan zi
adalah jarak tegak dari titik berat elemen yang ke i ke sumbu rolling.
Untuk mendapatkan jari – jari girasi tambahan k’xx dilakukan dengan bantuan
Gambar 3. Penentuan momen inersia tambahan secara tepat sebenarnya tidak begitu penting karena besar momen inersia tambahan tersebut relatif kecil dibanding momen inersia kapal itu sendiri. Nilai dari jari – jari sebenarnya
k
xx
2sering ditulis dalam bentuk fraksi dari lebar kapal (B), dan dalam batasan normal adalah 0,3B ≤
k
xx
2≤ 0,45B. Jari – jari girasi kapal sebenarnya dapat juga didekati dengan formula empiris. Dari hasil – hasil percobaan terhadap model dari berbagai jenis kapal, didapat dua buah formula untuk memperkirakan jari – jari girasi sebenarnya dari gerakan rolling yaitu; yang pertama adalah untuk kapal dagang biasa:
2
2 2 , 2 1 1 , 1 Cu Cb HeT HeB CbCu f B kxx ( 8 ) Dimana Cb adalah koefisien blok, Cu adalah koefisien geladak atas (upper deck) yang merupakan luas geladak dibagi dengan perkalian panjang kapal(LOA) dengan lebar kapal (B), dan He merupakan koefisien tinggi efektif dari bangunan atas yaitu D + (A/lpp) dimana lpp merupakan panjang kapal diantara dua garis tegak AP adan FP, D adalah ketinggian kapal hingga geladakutama, serta A merupakan luas proyeksi sisi dari bangunan atas dan rumah geladak di atas geladak utama, selanjutnya (f) adalah tetapan yang tergantung dari jenis kapal dimana senilai 0,125 untuk kapal penumpang, kapal barang, serta gabungan keduanya, dan senilai 0,133 untuk kapal tanker, 0,177 untuk kapal penangkap ikan paus dan senilai 0,2 untuk kapal ikan kelas bonito. Sedangkan formula jari- jari girasi yang kedua diperuntukkan kapal perang yaitu
2
2 2 , 2 1 1 , 1Ce Cb Hnd Hn Bu CbCe f B kxx ( 9 ) Dimana d adalah sarat rata – rata (moulded) jika kapal mempunyai balok lunas, Ce adalah koefisien dari luas dek yang terlihat, dan Hn = D + An.lpp, dimana An adalah luas total proyeksi sisi dari forecastle dibawah bridge dan senjata, dan D adalah tinggi dari atas lunas sampai ke dek atas, Bu merupakan lebar maksimum kapal dibawah air, sedangkan koefisien ( f) mempunyai nilai 0,177 untuk kapal tempur, o,172 untuk kapal penjelajah,perusak dan torpedo boat.Gambar3. Jari – jari girasi tambahan kapal
Penentuan koefisien selanjutnya pada persamaan (3) adalah untuk peredam (damping) yang mana dalam penelitian ini diasumsikan linier dan konstan. Gaya peredam yang bekerja pada kapal selama gerakan rolling dapat disebabkan berbagai kombinasi berikut; gelombang, gaya gesek air tehadap permukaan kapal atau eddy making, bilga keel, skeg dan tonjolan badan kapal yang lain, tahanan antara kapal dan udara, kehilangan energi karena panas yang timbul selama gerakan rolling, dan tegangan permukaan air. Di penelitian ini koefisien peredam dihitung sebagai akibat dari gelombang, karena pengaruhnya yang besar. Koefisien damping dapat dihitung dengan menggunakan teori potongan (strip theory). Pada teori ini koefisien peredam per unit panjang ditulis :
A
B
n e ng
b
2 3 22
( 10 )Dimana
A
didefinisikan sebagai berikut :
2 2 22
g
B
d
e nA
(11)Kemudian dengan teori potongan , koefisien peredam b pada persamaan (3) dapat dihitung dengan:
d b
b
n (12)Nilai koefisien lainnya pada persamaan (11) bisa diperoleh dengan menggunakan Gambar 4 yang menunjukkan potongan Lewis, dimana nilai dΦ merupakan potongan
individu koefisien β dan Sn, dimana:
B
B
n
dan n n n T B S 2 ( 13 )Nilai – nilai dari Gambar 4 hanya berlaku pada, karena kapal berlayar dengan kecepatan dinas V, maka akan ada
penambahan dari koefisien redaman. Nilai dari penambahan koefisien
ini dapat dihitung dari persamaan di bawah ini: 12 2 2 1 00085 , 0 b n b n b n c C F C F C F GM L B L b b ( 14 )
Dimana Fn merupakan angka froude yaitu
gl
v
, Cb adalah koefisien blok, dan bcmerupakan koefisien kritis redaman dari rolling untuk sistem linier yaitu
2
c
1I
xx
, dan C1 merupakan koefisien pertama darimomen pengembali non – linier.
Penentuan koefisien ketiga dari persamaan (3) adalah untuk momen pengembali c1 , c3 ,
c5 koefisien – koefisien ini dapat diperoleh
dari pendekatan terhadap kurva stabilitas momen kapal pada Gambar 5 dengan persamaan polynomial dalam bentuk :
...
5 5 3 3 1
GZ
c
c
c
( 15 )Gambar 4. Koefisien redaman dari potongan Lewis
Gambar 5. Kurva stabilitas untuk koefisien momen pengembali
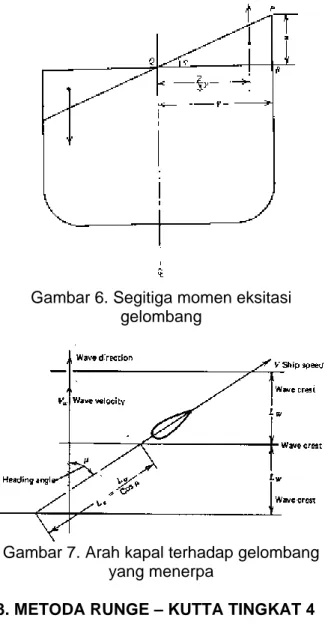
Penentuan koefisien yang terakhir pada persamaan (3) adalah untuk momen eksitasi dimana pada penelitian ini penyebabnya adalah gelombang. Gerakan rolling kapal pada kondisi ini dihitung dalam arah gelombang (00 < μ < 1800 ) terhadap arah kapal. Karena pada arah 00 dan 1800 dapat dipandang sebagai kasus khusus dimana tak ada momen eksitasi tetapi gerakan rolling bisa tak stabil karena persamaan differensialnya tak ada solusi umum dan diselesaikan melalui model test. Gerakan rolling kapal pada gelombang beraturan besaran momen eksitasi yang bekerja pada badan kapal disebabkan karena perubahan gaya apung ketika kapal terkena gelombang dan frekuensi eksitasi yang bekerja dihitung berdasarkan arah kapal terhadap gelombang yang menerpanya. Momen eksitasi tersebut dihitung dengan mengintegrasi bagian – bagian badan kapal yang berbeda gaya apungnya. Potongan badan kapal tersebut diasumsikan berupa segitiga seperti yang ditunjukkan pada Gambar 6. Maka untuk dua segitiga tersebut momen rolling- nya :
dx
y
gy
M
y 0 33
2
( 16 ) Atau
kx
dx
t
k
gy
M
asin
cos
cos
cos
e3
2
3
(16.a ) Dimana ;
asin
kxcos
kysin
et
, dan; 0 y y
kemiringan(slope) gelombangdua dimensi , dan ς merupakan persamaan tinggi gelombang,
amerupakan amplitude gelombang, serta μ adalah arah gelombang menerpa kapal, sehingga momen eksitasi pada keseluruhan badan kapal adalah:
kx
y dx
t gk M e L L a sin cos cos cos
3 2 2 2 3
( 17 ) Maka amplitudo dari momen M0 adalah :
2 2 3 cos cos sin 3 2 L L a kx ydx gk M ( 18 )Frekuensi eksitasi dari momen akibat adanya gelombang dengan arah tertentu ( dominan ) dapat diperoleh dengan memperhatikan Gambar 7. Dari gambar tersebut komponen kecepatan kapal v yang searah dengan gelombang adalah vcosμ dan kecepatan relatip kapal terhadap gelombang adalah kecepatan gelombang ( vw ) - vcosμ .
Sehingga waktu yang ditempuh oleh kapal dari puncak gelombang ke puncak berikutnya atau periode gelombangnya(Te) adalah:
v v
cos
1 w w e T T ( 19 )Dimana Tw adalah pembagian panjang gelombang Lw oleh kecepatan gelombang ,
perlu diingat bahwa apabila kapal berlayar berlawanan arah dengan gelombang maka harga cosμ adalah negatip. Dari persamaan ( 19 ) di atas maka kecepatan sudut eksitasi momen dapat ditulis:
w1
wv
cos
g
e ( 20 )Dimana kecepatan gelombang vw adalah
pembagian percepatan grafitasi g oleh kecepatan sudut gelombang ωw .Dengan
lengkapnya cara mendapatkan koefisien – koefisien dari persamaan ( 3 ), selanjutnya persamaan tersebut tentunya dapat diselesaikan dengan bantuan metoda numerik Runge – Kutta tingkat 4 yang akan dibahas pada bagian berikut dari penulisan ini.
Gambar 6. Segitiga momen eksitasi gelombang
Gambar 7. Arah kapal terhadap gelombang yang menerpa
3. METODA RUNGE – KUTTA TINGKAT 4
Pemecahan persamaan non-linear rolling akan lebih mudah jika diselesaikan dengan metoda Runge – Kutta order 4 karena ketelitiannya yang cukup baik. Pada penelitian ini program komputer dibuat oleh penulis dan dilakukan verifikasi hasil perhitungan persamaan differensial yang sama dari daftar acuan [5]. Metoda Runge – Kutta tingkat 4 dipakai untuk menghindari perhitungan penurunan tingkat tinggi yang mana melbatkan deret taylor. Sebagai ganti dari penurunan tersebut dipakai nilai – nilai yang merupakan hasil dari suatu fungsi f(x,y) yang mana secara mendasar meniru ketelitian dari deret taylor. Karena mudahnya metoda ini menjadi sangat populer. Formula
dari metoda Runge – Kutta order 4 ini adalah:
1 2 3 4
3 4 3 1 2 1 1 , 2 2 1 , 2 1 2 1 , 2 1 , k k k k x y h x y k y h x hf k k y h x hf k k y h x hf k y x hf k
( 21 )Dan dimana σ adalah tetapan ketelitian. Jika formula di atas diterapkan untuk memecahkan persamaan ( 3 ) , persamaan tersebut ditulis kembali ke dalam bentuk differensial tingkat pertama dengan membuat
sehingga menjadi:
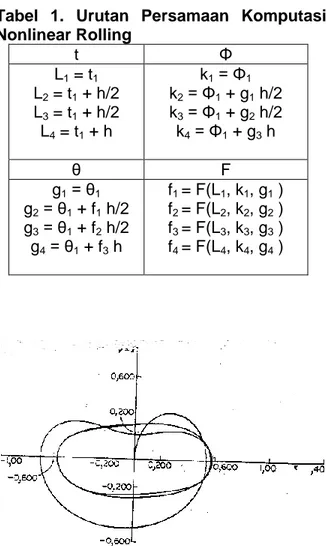
cos 3 5 , , t F D C B A Jt E ( 22 )Persamaan komputasi yang digunakan untuk diprogramkan pada komputer digital diurutkan seperti pada Tabel 1
Tabel 1. Urutan Persamaan Komputasi Nonlinear Rolling t Φ L1 = t1 L2 = t1 + h/2 L3 = t1 + h/2 L4 = t1 + h k1 = Φ1 k2 = Φ1 + g1 h/2 k3 = Φ1 + g2 h/2 k4 = Φ1 + g3 h θ F g1 = θ1 g2 = θ1 + f1 h/2 g3 = θ1 + f2 h/2 g4 = θ1 + f3 h f1 = F(L1, k1, g1 ) f2 = F(L2, k2, g2 ) f3 = F(L3, k3, g3 ) f4 = F(L4, k4, g4 )
Penyeleseian Pers diff non- linier ( 23 )
-0.6 -0.4 -0.2 0 0.2 0.4 0.6 0.8 1 -1 -0.5 0 0.5 1 perpindahan k e c e p a t a n
Gambar 8. Penyeleseian persamaan nonlinier differensial (23) oleh program
komputasi yang dibuat oleh penulis
Gambar 9. Penyeleseian persamaan nonlinier differensial (23) oleh program
komputasi pada daftar acuan [ 5 ] Dari urutan di atas maka nilai Φ dan θ ditentukan oleh persamaan berikutnya dengan h = δt. Untuk ketelitian yang baik biasanya h diambil 0,1333. Selanjutnya persamaan 22 menjadi:
1 2 3 4
1 4 3 2 1 1f
f
f
f
h
g
g
g
g
h
i i i i
( 22. a )Jadi dengan i = 1 maka Φ2 dan θ2 didapat
dengan t2 = t1 + h, dan tabel terdahulu L, k,
ke dalam persamaan pengulangan untuk mendapatkan Φ3 dan θ3 . Program yang
dibuat oleh penulis ini diverifikasi dengan memecahkan persamaan nonlinear
differensial yang terdapat pada daftar acuan [ 5 ]:
t x x dt dx dt x d 5 , 0 cos 5 , 0 5 , 0 4 , 0 3 2 2 ( 23 )Menunjukkan hasil yang tak berbeda jauh bagi keduanya dimana hal ini di tunjukkan pada Gambar 8 dan 9.
4.HASIL PERHITUNGAN dan DISKUSI
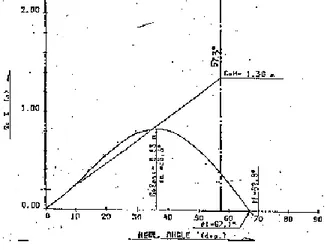
Pada penelitian ini contoh perhitungan rolling kapal diterapkan pada kapal Caraka Jaya III, dengan ukuran utama sebagai berikut; panjang antar garis tegak(Lpp) adalah 92m, lebar kapal(B) adalah 16,5m, tinggi kapal (D) adalah 7,8m dan sarat (T) adalah 5m, serta kecepatan dinas (v) adalah 6,17m/det. Data ini juga dilengkapi oleh kurva stabilitas dimana diperlihatkan pada Gambar 10, yang dapat dipergunakan untuk menentukan koefisien – koefisien momen pengembali.
Gambar 10. Kurva stabilitas kapal Caraka Jaya
Kapal ini berlayar di laut dengan mempunyai variasi rasio panjang kapal terhadap panjang gelombang
w ppL
L
sebesar 0,8 hingga 1,25 dan kecepatan gelombang (Vw)sebesar 13,41 m/det serta beramplitudo ςa
sebesar 1m. Pengambilan amplitudo gelombang 1 m karena untuk laut indonesia kemungkinan besar terjadi gelombang laut rata – rata setinggi 2 m. Hasil perhitungan berupa grafik hubungan antara sudut heading terhadap harga mutlak amplitudo rolling maksimum dan grafik hubungan antara frekuensi eksitasi terhadap harga mutlak amplitudo rolling maksimum diperlihatkan pada Gambar 11. a hingga 11.g dan Gambar 12. a hingga 12.g. Berdasarakan kurva stabilitas kapal caraka Jaya III, lengan momen heeling maksimum GZ adalah 0.83m dengan sudut heeling maksimum 36,30, dimana maksimum sudut heeling yang diijinkan bagi keselamatan kapal adalah ≤ 60% dari yang terjadi pada lengan GZ maksimum jadi untuk kasus Caraka Jaya ini untuk keselamatannya, sudut heeling yang aman adalah ≤ 220
atau 0,3841 rad. Dari Gambar 11.a pada Lpp/Lw = 0,8, amplitudo maksimum
membesar nilainya dimulai dengan sudut heading μ = 100 dan mencapai maksimum
pada sudut heading μ = 600 kemudian
berkurang nilainya sesuai dengan bertambahnya sudut heading kapal. Kapal mengalami keadaan berbahaya pada daerah 0 < μ < 1400 karena amplitudo rolling
A
maksimum ≥ 0, 3841 radian. Untuk Lpp/Lw = 0,8, pada Gambar 11.b ,amplitudo maksimum membesar nilainya dimulai dengan sudut heading μ = 100
dan mencapai maksimum pertama pada sudut heading μ = 200
dan berkurang nilainya hingga sudut heading μ = 400
kemudian nilai amplitudo bertambah kembali hingga mencapai maksimum untuk kedua kalinya pada sudut heading μ = 600 kemudian
berkurang sesuai dengan bertambahnya sudut heading kapal. Kapal mengalami keadaan berbahaya pada daerah 0 < μ < 1300 karena amplitudo rolling
A
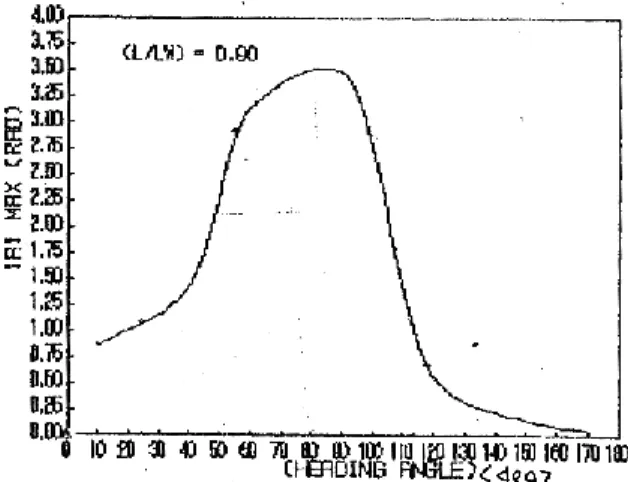
maksimum ≥ 0, 3841 radian. Gambar 11.c pada Lpp/Lw = 0,9, amplitudomaksimum membesar nilainya dimulai dengan sudut heading μ = 100 dan
mencapai maksimum pada sudut heading μ = 900 kemudian berkurang nilainya sesuai
dengan bertambahnya sudut heading kapal. Kapal mengalami keadaan berbahaya pada daerah 0 < μ < 1250 karena amplitudo rolling
A
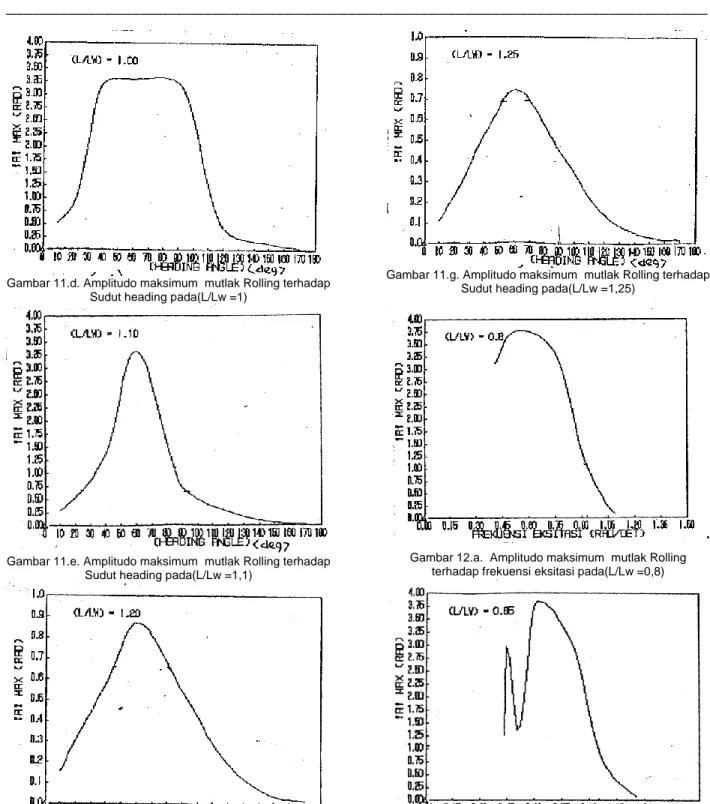
maksimum ≥ 0, 3841 radian. Pada Gambar 11.d untuk Lpp/Lw = 1, terjadi duakali puncak
A
maksimum yaitu pada sudut heading μ = 600 dan μ = 900 dengan nilaiyang hampir sama nilainya , selanjutnya nilai amplitudo menurun kembali. Daerah berbahaya bagi kapal Caraka Jaya ini terdapat pada sudut heading < μ = 1200
dimana amplitudo rolling
A
maksimum ≥ 0, 3841 radian . Gambar 11.e pada Lpp/Lw =1,1, amplitudo maksimum membesar nilainya dimulai dengan sudut heading μ = 100 dan mencapai maksimum pada sudut heading μ = 600 kemudian berkurang
nilainya sesuai dengan bertambahnya sudut heading kapal. Kapal Caraka Jya ini mengalami keadaan berbahaya pada daerah 180 < μ < 1080 karena amplitudo rolling
A
maksimum ≥ 0, 3841 radian. Untuk Gambar 11.f pada Lpp/Lw = 1,2,amplitudo maksimum membesar nilainya dimulai dengan sudut heading μ = 100 dan
mencapai maksimum pada sudut heading μ = 600 kemudian berkurang nilainya sesuai dengan bertambahnya sudut heading kapal. Kapal Caraka Jya ini mengalami keadaan berbahaya pada daerah amplitudo rolling
A
maksimum ≥ 0, 3841 radian untuk sudut heading 300 < μ < 1020 . Gambar 11.g pada Lpp/Lw = 1,25, amplitudo maksimummembesar nilainya dimulai dengan sudut heading μ = 100 dan mencapai maksimum
pada sudut heading μ = 600 kemudian
berkurang nilainya sesuai dengan bertambahnya sudut heading kapal. Kapal Caraka Jya ini mengalami keadaan berbahaya pada daerah 32,50 < μ < 92,50 karena amplitudo rolling
A
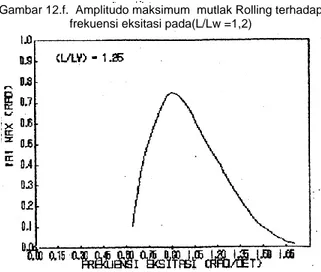
maksimum ≥ 0, 3841 radian. Pada Gambar 12. a sampai 12.g terdapat grafik harga mutlak amplitudo maksimum terhadap frekuensi eksitasi ( ωe )dengan bentuk gambar relatip sama dengan Gambar 11.a hingga 11.g. Maka daerah frekuensi eksitasi yang perlu dihindari oleh
kapal karena dapat menyebabkan terjadinya amplitudo maksimum gerakan rolling ≥ 0, 3841 radian adalah sebagai berikut; pada Lpp/Lw = 0,8, Gambar 12.a , ( 0 < ωe <
1.03125 ) rad/det, pada Lpp/Lw = 0,85,
Gambar 12.b , ( 0 < ωe < 1.040625 ) rad/det
, pada Lpp/Lw = 0,9, Gambar 12.c , ( 0 < ωe
< 1.05 ) rad/det , pada Lpp/Lw = 1, Gambar
12.d , ( 0 < ωe < 1,14375 ) rad/det , pada
Lpp/Lw = 1,1, Gambar 12.e , ( 0,58125 < ωe
< 1.14375 ) rad/det , serta pada Lpp/Lw =
1,2, Gambar 12.f , ( 0,88571 < ωe < 1.2485 )
rad/det, dan terakhir pada Lpp/Lw = 0,8,
Gambar 12.g , ( 0,7287 < ωe < 1.24285 )
rad/det.
5. KESIMPULAN
Pada penelitian ini ditunjukkan bahwa persamaan nonlinear rolling dapat diselesaikan secara relatip lebih mudah dengan metoda numerik Runge –Kutta tingkat 4. Hasil dari perhitungan nonlinear rolling ini diharapkan dapat memprediksi gerakan rolling dengan tepat,karena dapat diterapkan pada sudut besar( > 80 ) sehingga nakhoda kapal dapat memakainya untuk menhindari kapalnya pada sudut heading tertentu terhadap datangnya gelombang maupun frekuensi eksitasi gelombang yang menerpa kapal yang dapat membuat kapal terbalik atau tenggelam. Dan yang lebih penting lagi agar kapal beserta isinya tiba dengan selamat di tujuan.
DAFTAR PUSTAKA
1. Bhattacharya, R,” Dynamics of Marine Vehicles”, John Wiley &
Sons Inc(1978)
2. Chapra, S. C & Canale RP,”
Numerical Method for Engineers”,
McGraw – Hill book Company (1989) 3. Lewis V. E,” Motions in Waves and Controlability”, PNA Vol III,”
SNAME 1988
4. Nugroho W. H,” Perhitungan Rolling Kapal pada Gelombang Regular”, Tugas Akhir II, FTK - ITS
(1989)
5. Thompson W. T,” Teori Getaran
dengan Penerapannya,
terjemahan Lea prasetyo, ITS,”
Penerbit Erlangga ( 1986)
RIWAYAT PENULIS
Wibowo H. Nugroho, lahir di Jakarta, tahun 1967, lulus Sarjana Teknik Perkapalan (Ir/1990) dari Institut Teknologi Sepuluh Nopember (ITS) Surabaya, Msc (1994) di bidang Engineering Mathematics, dari University of Newcastle, Newcastle Upon Tyne, The United Kingdom. Dan PhD (2002) di bidang Smart Structure / Mechanical Engineering, Monash University ,Melbourne, Australia. Saat ini bekerja sebagai Perekayasa pada divisi Penelitian
dan Pengembangan untuk
Hidroelastisitas/Marine Structural Monitoring pada UPT Balai Pengkajian dan Penelitian Hidrodinamika, BPP Teknologi Surabaya. Penulis juga menjadi staf pengajar Teknik Mesin pada Universitas Muhammadiyah Sidoarjo dan pasca sarjana F.T kelautan IITS, Surabaya
Gambar 11.a. Amplitudo maksimum mutlak Rolling terhadap Sudut heading pada(L/Lw =0,8)
Gambar 11.b.Amplitudo maksimum mutlak Rolling terhadap Sudut heading pada(L/Lw =0,85)
Gambar 11.c.Amplitudo maksimum mutlak Rolling terhadap Sudut heading pada(L/Lw =0,9)
Gambar 11.d. Amplitudo maksimum mutlak Rolling terhadap Sudut heading pada(L/Lw =1)
Gambar 11.e. Amplitudo maksimum mutlak Rolling terhadap Sudut heading pada(L/Lw =1,1)
Gambar 11.f. Amplitudo maksimum mutlak Rolling terhadap Sudut heading pada(L/Lw =1,2)
Gambar 11.g. Amplitudo maksimum mutlak Rolling terhadap Sudut heading pada(L/Lw =1,25)
Gambar 12.a. Amplitudo maksimum mutlak Rolling terhadap frekuensi eksitasi pada(L/Lw =0,8)
Gambar 12.b. Amplitudo maksimum mutlak Rolling terhadap frekuensi eksitasi pada(L/Lw =0,85)
Gambar 12.c. Amplitudo maksimum mutlak Rolling terhadap frekuensi eksitasi pada(L/Lw =0,9)
Gambar 12.d. Amplitudo maksimum mutlak Rolling terhadap frekuensi eksitasi pada(L/Lw =1)
Gambar 12.e. Amplitudo maksimum mutlak Rolling terhadap frekuensi eksitasi pada(L/Lw =1,1)
Gambar 12.f. Amplitudo maksimum mutlak Rolling terhadap frekuensi eksitasi pada(L/Lw =1,2)
Gambar 12.g. Amplitudo maksimum mutlak Rolling terhadap frekuensi eksitasi pada(L/Lw =1,25)