BAB II DASAR TEORI
2.1 Pengertian Jalan, Klasifikasi Jalan Raya dan Kecelakaan Lalu Lintas di Jalan Raya
2.1.1 Pengertian Jalan
Jalan adalah. prasarana transportasi darat yang meliputi segala bagian jalan, termasuk bangunan pelengkap dan perlengkapannya yang diperuntukkan bagi lalu lintas, yang berada pada permukaan tanah, di atas permukaan tanah, di bawah permukaan tanah dan/atau air, serta di atas permukaan air, kecuali jalan kereta api, jalan lori, dan jalan kabel (Peraturan Pemerintah Nomor 34 Tahun 2006).
Jalan raya adalah jalur - jalur tanah di atas permukaan bumi yang dibuat oleh manusia dengan bentuk, ukuran - ukuran dan jenis konstruksinya sehingga dapat digunakan untuk menyalurkan lalu lintas orang, hewan dan kendaraan yang mengangkut barang dari suatu tempat ke tempat lainnya dengan mudah dan cepat (Clarkson H.Oglesby,1999).
Untuk perencanaan jalan raya yang baik, bentuk geometriknya harus ditetapkan sedemikian rupa sehingga jalan yang bersangkutan dapat memberikan pelayanan yang optimal kepada lalu lintas sesuai dengan fungsinya, sebab tujuan akhir dari perencanaan geometrik ini adalah menghasilkan infrastruktur yang aman, efisiensi pelayanan arus lalu lintas dan memaksimalkan ratio tingkat penggunaan biaya juga memberikan rasa aman dan nyaman kepada pengguna jalan.
2.1.2 Klasifikasi Jalan
Jalan raya pada umumnya dapat digolongkan dalam 4 klasifikasi yaitu: klasifikasi menurut fungsi jalan, klasifkasi menurut kelas jalan, klasifikasi menurut medan jalan dan klasifikasi menurut wewenang pembinaan jalan (Bina Marga 1997).
2.1.2.1 Klasifikasi menurut fungsi jalan
Klasifikasi menurut fungsi jalan terdiri atas 3 golongan yaitu:
1) Jalan arteri yaitu jalan yang melayani angkutan utama dengan ciri-ciri perjalanan jarak jauh, kecepatan rata-rata tinggi, dan jumlah jalan masuk dibatasi secara efisien.
2) Jalan kolektor yaitu jalan yang melayani angkutan pengumpul/pembagi dengan ciri-ciri perjalanan jarak sedang, kecepatan rata-rata sedang dan jumlah jalan masuk dibatasi.
3) Jalan lokal yaitu Jalan yang melayani angkutan setempat dengan ciri-ciri perjalanan jarak dekat, kecepatan rata-rata rendah, dan jumlah jalan masuk tidak dibatasi.
2.1.2.2 Klasifikasi menurut kelas jalan
Klasifikasi menurut kelas jalan berkaitan dengan kemampuan jalan untuk menerima beban lalu lintas, dinyatakan dalam muatan sumbu terberat (MST) dalam satuan ton.
Tabel 2.1. Klasifikasi jalan raya menurut kelas jalan
Sumber : Tata Cara Perencanaan Geometrik Jalan Antar Kota, Ditjen Bina Marga, 1997.
2.1.2.3 Klasifikasi menurut medan jalan
Medan jalan diklasifikasikan berdasarkan kondisi sebagian besar kemiringan medan yang diukur tegak lurus garis kontur. Keseragaman kondisi medan yang diproyeksikan harus mempertimbangkan keseragaman kondisi medan menurut rencana trase jalan dengan mengabaikan perubahan-perubahan pada bagian kecil dari segmen rencana jalan tersebut.
Tabel 2..2. Klasifikasi Menurut Medan Jalan:
No Jenis Medan Notasi Kemiringan Medan (%)
1 Datar D < 3
2 Berbukit B 3-25
3 Pegunungan G >25
Sumber : Tata Cara Perencanaan Geometrik Jalan Antar Kota, Ditjen Bina Marga 1997.
Fungsi Kelas Muatan Sumbu Terberat/MST (ton) Arteri I II IIIA >10 10 8 Kolektor III A III B 8
2.1.2.4Klasifikasi menurut wewenang pembinaan jalan
Klasifikasi menurut wewenang pembinaannya terdiri dari Jalan Nasional, Jalan Provinsi, Jalan Kabupaten/Kotamadya dan Jalan Desa.
2.1.3 Kecelakaan Lalu Lintas di Jalan Raya
Kecelakaan lalu lintas adalah suatu peristiwa di jalan yang tidak di sangka – sangka dan tidak disengaja melibatkan kendaraan yang sedang bergerak dengan atau tanpa pemakai jalan lainnya, mengakibatkan korban manusia atau kerugian harta benda ( Peraturan Pemerintah No 43 Tahun 1993).
Faktor - faktor penyebab kecelakaan terdiri dari : faktor manusia, faktor kendaraan, faktor jalan, faktor lingkungan (Elly T.P 2006).
1. Faktor manusia (Pengemudi dan Pejalan kaki) a) Pengemudi
Beberapa kriteria pengemudi sebagai penyebab kecelakaan antara lain: • Pengemudi mabuk (Drunk Driver)
• Pengemudi ngantuk atau lelah (Fatigu or Overly Tired Driver) • Pengemudi lengah (Emotional or Distracted driver)
b) Pejalan Kaki
Penyebab kecelakaan dapat ditimpakan pada pejalan kaki pada berbagai kemungkinan antara lain seperti menyeberang jalan pada tempat dan waktu yang tidak tepat (aman), berjalan terlalu ketengah dan tidak berhati – hati.
2. Faktor kendaraan: Kendaraan dapat menjadi faktor penyebab kecelakaan apabila tidak dapat dikendalikan sebagaimana mestinya yaitu sebagai akibat kondisi teknis yang tidak layak jalan ataupun penggunaannya tidak sesuai ketentuan antara lain:
• Rem blong, kerusakan mesin, ban pecah adalah merupakan kondisi kendaraan yang tidak layak jalan. Kemudi tidak baik, as atau kopel lepas, lampu mati khususnya pada malam hari, slip dan sebagainya. • Over load atau kelebihan muatan adalah merupakan penggunaan
kendaraan yang tidak sesuai ketentuan tertib muatan.
• Design kendaraan dapat merupakan faktor penyebab beratnya ringannya kecelakaan, tombol – tombol di dashboard kendaraan dapat mencederai orang terdorong kedepan akibat benturan, kolom kemudi dapat menembus dada pengemudi pada saat tabrakan. Demikian design bagian depan kendaraan dapat mencederai pejalan kaki yang terbentur oleh kendaraan. Perbaikan design kendaraan terutama tergantung pembuat kendaraan namun peraturan atau rekomendasi pemerintah dapat memberikan pengaruh kepada perancang.
• Sistem lampu kendaraan yang mempunyai dua tujuan yaitu agar pengemudi dapat melihat kondisi jalan didepannya konsisten dengan kecepatannya dan dapat membedakan / menunjukkkan kendaraan kepada pengamat dari segala penjuru tanpa menyilaukan.
3. Faktor jalan
Jalan dapat menjadi penyebab kecelakaan antar lain untuk hal – hal sebagai berikut:
• Kontruksi pada permukaan jalan (misalnya terdapat lubang yang sulit dikenal oleh pengemudi)
• Kontruksi jalan yang rusak atau tidak sempurna (misalnya bila posisi permukaan bahu jalan terlalu randah terhadap permukaan jalan)
• Geomrtik jalan yang kurang sempurna misalnya derajat kemiringan (superelevasi) yang terlalu kecil atau terlalu besar pada tikungan, terlalu sempitnya pandangan bebas pengemudi dan kurangnya perlengkapan jalan.
4. Lingkungan
Lingkungan juga dapat menjadi faktor penyebab kecelakaan misalnya pada saat adanya kabut, asap tebal, penyeberang, hewan, genangan air, material di jalan atau hujan lebat menyebabkan daya pandang pengemudi sangat berkurang untuk dapat mengemudikan kendaraannya secara aman.
PT Jasa Marga mengelompokkan jenis tabrakan yang melatarbelakangi terjadinya
kecelakaan lalu lintas menjadi :
1. Tabrakan depan – depan
Adalah jenis tabrakan antara dua kendaraan yang tengah melaju dimana keduanya saling beradu muka dari arah yang berlawanan, yaitu bagian depan kendaraan yang satu dengan bagian depan kendaraan lainnya.
2. Tabrakan depan – samping
Adalah jenis tabrakan antara dua kendaraan yang tengah melaju dimana bagian depan
kendaran yang satu menabrak bagian samping kendaraan lainnya.
3. Tabrakan samping – samping
Adalah jenis tabrakan antara dua kendaraan yang tengah melaju dimana bagian samping kendaraan yang satu menabrak bagian yang lain.
4. Tabrakan depan – belakang
Adalah jenis tabrakan antara dua kendaraan yang tengah melaju dimana bagian depan
kendaraan yang satu menabrak bagian belakang kendaraan di depannya dan kendaraan tersebut berada pada arah yang sama.
5. Menabrak penyeberang jalan
Adalah jenis tabrakan antara kendaraan yang tengah melaju dan pejalan kaki yang sedang menyeberang jalan.
6. Tabrakan sendiri
Adalah jenis tabrakan dimana kendaraan yang tengah melaju mengalami kecelakaan sendiri atau tunggal.
7. Tabrakan beruntun
Adalah jenis tabrakan dimana kendaraan yang tengah melaju menabrak mengakibatkan terjadinya kecelakaan yang melibatkan lebih dari dua kendaraan secara beruntun.
8. Menabrak obyek tetap
Adalah jenis tabrakan dimana kendaraan yang tengah melaju menabrak obyek tetap dijalan
2.2 Perencanaan Geometrik Jalan Raya 2.2.1 Standar Perencanaan
Standar perencanaan adalah ketentuan yang memberikan batasan-batasan dan metode perhitungan agar dihasilkan produk yang memenuhi persyaratan. Standar perencanaan geometrik untuk ruas jalan di Indonesia biasanya menggunakan
peraturan resmi yang dikeluarkan oleh Direktorat Jenderal Bina Marga tentang perencanaan geometrik jalan raya. Peraturan yang dipakai dalam studi ini adalah “Tata Cara Perencanaan Geometrik Jalan Antar Kota” yang dikeluarkan oleh Direktorat Jenderal Bina Marga dengan terbitan resmi No. 038 T/BM/1997 dan American Association of State Highway and Transportation Officials. 2001 (AASHTO 2001).
2.2.2 Kendaraan Rencana
Kendaraan Rencana adalah kendaraan yang dimensi dan radius putarnya dipakai sebagai acuan dalam perencanaan geometrik. Dilihat dari bentuk, ukuran dan daya dari kendaraan – kendaraan yang menggunakan jalan, kendaraan - kendaraan tersebut dapat dikelompokkan (Bina Marga, 1997).
Kendaraan yang akan digunakan sebagai dasar perencanaan geometrik disesuaikan dengan fungsi jalan dan jenis kendaraan yang dominan menggunakan jalan tersebut. Pertimbangan biaya juga tentu ikut menentukan kendaraan yang dipilih sebagai perencanaan.
Kendaraan Rencana dikelompokkan ke dalam 3 kategori antara lain:
1) Kendaraan Kecil, diwakili oleh mobil penumpang.
2) Kendaraan Sedang, diwakili oleh truk 3 as tandem atau oleh bus besar 2 as. 3) Kendaraan Besar, diwakili oleh truk semi-trailer.
Tabel 2.3 Dimensi Kendaraan Rencana KATEGORI KENDARAAN RENCANA DIMENSI KENDARAAN (cm) TONJOLAN (cm) RADIUS PUTAR (cm) RADIUS TONJOL AN (cm) Ting gi Leba r Panja ng Depa n Belaka ng Minimum Maksim um Kendaraan Kecil 130 210 580 90 150 420 730 780 Kendaraan Sedang 410 260 1210 210 240 740 1280 1410 Kendaraan Besar 410 260 2100 1200 900 2900 14000 1370
Sumber : Tata Cara Perencanaan Geometrik Jalan Antar Kota, Ditjen Bina Marga 1997.
2.2.3 Volume Lalu – Lintas Rencana
Volume lalu lintas menunjukkan jumlah kendaraan yang melintasi satu titik pengamatan dalam satu satuan waktu (hari, jam, menit). Volume lalu lintas yang tinggi membutuhkan lebar perkerasan jalan lebih besar sehingga tercipta kenyamanan dan keamanan dalam berlalu lintas. Sebaliknya jalan yang terlalu lebar untuk volume lalu lintas rendah cenderung membahayakan karena pengemudi cenderung mengemudikan kendaraannya pada kecepatan yang lebih
tinggi sedangkan kondisi jalan belum tentu memungkinkan. Disamping itu juga mengakibatkan peningkatan biaya pembangunan jalan yang tidak pada tempatnya/ tidak ekonomis (Sukirman, 1994).
Satuan volume lalu lintas yang umum dipergunakan sehubungan dengan penentuan jumlah dan lebar jalur adalah:
1. Lalu lintas harian rata-rata 2. Volume jam perencanaan
2.2.3.1 Lalu Lintas Harian Rata-Rata
Lalu lintas harian rata-rata adalah volume lalu lintas rata-rata dalam satu hari (Sukirman,1994). Cara memperoleh data tersebut dikenal dua jenis lalu lintas harian rata-rata, yaitu lalu lintas harian rata-rata tahunan (LHRT) dan lalu lintas harian rata-rata.
LHRT adalah jumlah lalu lintas kendaraan rata-rata yang melewati satu jalur jalan selama 24 jam dan diperoleh dari data selama satu tahunan penuh..
LHRT =
365
intasdalamSatuTahun L
Lalu Jumlah
………...………...2.1
Sedangkan LHR adalah hasil bagi jumlah kendaraan yang diperoleh selama pengamatan dengan lamanya pengamatan,
LHR = tan tan int Pengama Lamanya Pengama Selama as L Lalu Jumlah ……….2.2
Data LHR ini cukup teliti jika :
1. Pengamatan dilakukan pada interval-interval waktu yang cukup menggambarkan fluktuasi arus lalu lintas selama satu tahun.
2. Hasil LHR yang dipergunakan adalah harga rata-rata dari perhitungan LHR beberapa kali
2.2.3.2 Volume Jam Perencanaan (VJR)
Volume jam perencanaan (VJR) adalah volume lalu lintas per jam yang dipergunakan sebagai dasar perencanaan (Sony Sulaksono, 2001). Volume ini harus mencerminkan keadaan lalu lintas sebenarnya tetapi biasanya tidak sama dengan volume terbesar atau arus tersibuk yang akan melewatinya, perencanaan berdasarkan volume terbesar ini akan mengahasilkan konstruksi yang boros yang hanya akan berguna pada arus maksimum dan ini terjadi dalam kurun waktu singkat dalam sehari.
Volume lalu lintas untuk perencanaan geometrik umumnya ditetapkan dalam Satuan Mobil Penumpang (SMP) sehingga masing – masing jenis kendaraan yang diperkirakan yang akan melewati jalan rencana harus dikonversikan kedalam satuan tersebut dengan dikalikan nilai ekivalensi mobil penumpang (emp). Besarnya faktor ekivalensi tersebut, dalam perencanaan
geometrik jalan antar kota ditentukan pada tabel di bawah ini: Tabel 2.4 Ekivalen Mobil Penumpang (emp)
NO JENIS KENDARAAN DATAR/
PERBUKITAN
PEGUNUNGAN
1 Sedan, Jeep, Station Wagon 1,0 1,0
2 Pick-Up, Bus Kecil, Truck Kecil 1,2-2,4 1,9-3,5
3 Bus dan Truck Besar 1,2-5,0 2,2-6,0
Sumber : Tata Cara Perencanaan Geometrik Jalan Antar Kota, Ditjen Bina Marga 1997.
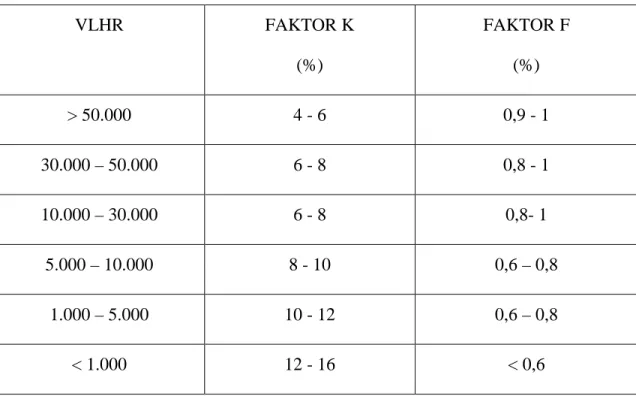
Besarnya volume jam perencanaan ditentukan dengan persamaan:
VJR = VLRH x F K
………...…2.3
Dimana : VJR = Volume Jam Perencanaan (smp/jam)
VLRH = Volume Lintas Harian Rata – rata Tahunan (smp/jam)
K = Faktor K, faktor volume lalu lintas jam tersibuk dalam setahun
F = Faktor variasi volume lalu lintas dalam satu jam tersibuk (Peak Hour Faktor / PHF)
sedangkan untuk jalan antar kota disesuaikan dengan besarnya VLHR seperti pada tabel di bawah ini:
Tabel 2.5 Penentuan faktor-K dan faktor-F berdasarkan Volume Lalu Lintas Harian Rata-rata VLHR FAKTOR K (%) FAKTOR F (%) > 50.000 4 - 6 0,9 - 1 30.000 – 50.000 6 - 8 0,8 - 1 10.000 – 30.000 6 - 8 0,8- 1 5.000 – 10.000 8 - 10 0,6 – 0,8 1.000 – 5.000 10 - 12 0,6 – 0,8 < 1.000 12 - 16 < 0,6
Sumber : Tata Cara Perencanaan Geometrik Jalan Antar Kota, Ditjen Bina Marga 1997.
2.2.4 Kecepatan Rencana
Kecepatan adalah besaran yang menunjukkan jarak yang ditempuh kendaraan dibagi waktu tempuh, biasanya dinyatakan dalam km/jam.
Kecepatan Rencana adalah kecepatan yang dipilih untuk keperluan perencanaan setiap bagian jalan raya seperti tikungan, kemiringan jalan, jarak
pandang dan lain- lain (Sukirman, 1994).
Faktor-faktor yang mempengaruhi besarnya kecepatan rencana adalah keadaan terrain apakah datar, berbukit atau gunung. Untuk menghemat biaya tentu saja perencanaan jalan sepantasnya disesuaikan dengan keadaan medan. Suatu jalan yang ada di daerah datar tentu saja memiliki design speed yang lebih tinggi dibandingkan pada daerah pegunungan atau daerah perbukitan.
Adapun faktor - faktor yang mempengaruhi kecepatan rencana antara lain:
a) Topografi ( Medan )
Untuk perencanaan geometrik jalan raya, keadaan medan memberikan batasan
kecepatan terhadap kecepatan rencana sesuai dengan medan perencanaan
( datar, berbukit, dan gunung ).
b) Sifat dan tingkat penggunaan daerah
Kecepatan rencana untuk jalan - jalan arteri lebih tinggi dibandingkan jalan
kolektor.Untuk kondisi medan yang sulit, kecepatan rencana suatu segmen jalan dapat diturunkan dengan syarat bahwa penurunan tersebut tidak lebih dari 20 km/jam (Bina marga 1997).
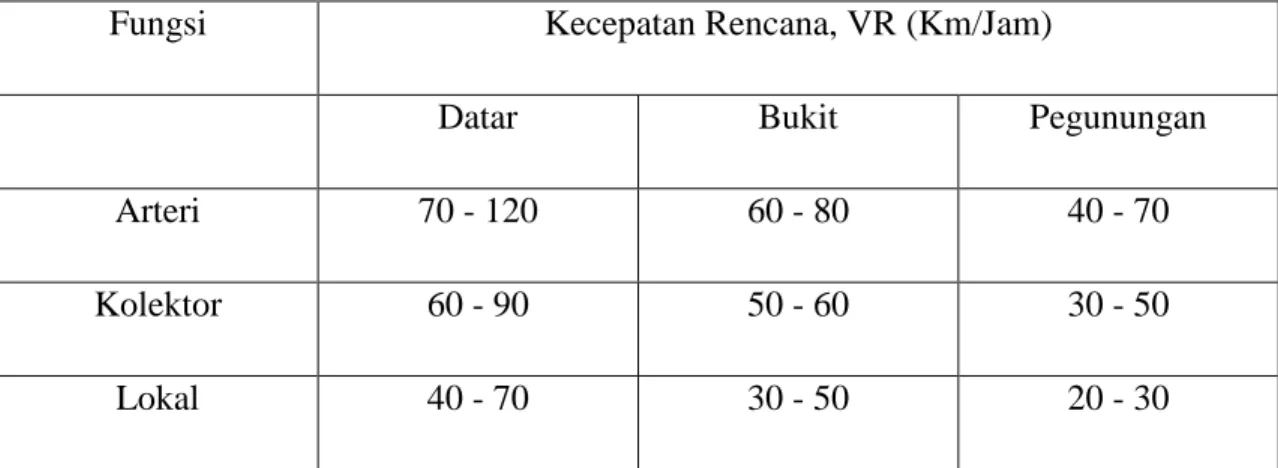
Tabel 2.6 Kecepatan Rencana, VR, Sesuai Klasifikasi Fungsi dan Kiasifikasi Medan Jalan
Fungsi Kecepatan Rencana, VR (Km/Jam)
Datar Bukit Pegunungan
Arteri 70 - 120 60 - 80 40 - 70
Kolektor 60 - 90 50 - 60 30 - 50
Lokal 40 - 70 30 - 50 20 - 30
Sumber : Tata Cara Perencanaan Geometrik Jalan Antar Kota, Ditjen Bina Marga 1997.
2.3 Elemen Perencanaan Geometrik Jalan 2.3.1 Penampang Melintang Jalan
Penampang melintang jalan adalah potongan suatu jalan secara melintang tegak lurus sumbu jalan (Sukirman, 1994). Bagian-bagian penampang melintang jalan yang terpenting dapat dibagi menjadi :
1. Jalur lalu lintas 2. Lajur
3. Bahu jalan 4. Selokan 5. Median
7. Lereng
Bagian-bagian penampang melintang jalan ini dan kedudukannya pada penampang melintang terlihat seperti pada gambar 2.1
Gambar 2.1 Penampang Melintang Jalan
Sumber : Tata Cara Perencanaan Geometrik Jalan Antar Kota, Ditjen Bina Marga 1997.
a) DAMAJA (Daerah Manfaat Jalan)
DAMAJA (Daerah Manfaat Jalan) adalah daerah yang dibatasi oleh batas ambang pengaman konstruksi jalan di kedua sisi jalan, tinggi 5 meter di atas
permukaan perkerasan pada sumbu jalan, dan kedalaman ruang bebas 1,5 meter di bawah muka jalan.
b) DAMIJA (Daerah Milik Jalan)
DAMIJA (Daerah Milik Jalan) adalah daerah yang dibatasi oleh lebar yang sama dengan Damaja ditambah ambang pengaman konstruksi jalan dengan tinggi 5 meter dan kedalaman 1.5 meter.
c) DAWASJA (Ruang Daerah Pengawasan Jalan)
DAWASJA (Ruang Daerah Pengawasan Jalan) adalah ruang sepanjang jalan di luar DAMAJA yang dibatasi oleh tinggi dan lebar tertentu, diukur dari sumbu jalan
sebagai berikut:
a) jalan Arteri minimum 20 meter b) jalan Kolektor minimum 15 meter c) jalan Lokal minimum 10 meter
Untuk keselamatan pemakai jalan, DAWASJA di daerah tikungan ditentukan oleh jarak pandang bebas.
Gambar 2.2 Penampang Melintang Jalan Dengan Median
Sumber : Dasar-Dasar Perencanaan Geometrik Jalan,Silvia Sukirman
Gambar 2.3. Penampang Melintang Jalan Tanpa Median Sumber : Dasar-Dasar Perencanaan Geometrik Jalan,Silvia Sukirman
2.3.1.1 Jalur Lalu Lintas
Jalur lalu lintas adalah keseluruhan bagian perkerasan jalan yang diperuntukan untuk lalu lintas kendaraan (Sukirman ,1994).
Lebar jalur lalu lintas (travelled way = carriage way) adalah saluran perkerasan jalan yang digunakan untuk lalu lintas kendaraan yang terdiri dari beberapa jalur yaitu jalur lalu lintas yang khusus diperuntukkan untuk di lewati oleh kendaraan dalam satu arah. Pada jalur lalu lintas di jalan lurus dibuat miring, hal ini diperuntukkan terutama untuk kebutuhan drainase jalan dimana air yang jatuh di atas permukaan jalan akan cepat mengalir ke saluran-saluran pembuangan. Selain itu, kegunaan kemiringan melintang jalur lalu lintas adalah untuk kebutuhan keseimbangan gaya sentrifugal yang bekerja terutama pada tikungan.
Separator.
Jalur lalu lintas dapat terdiri atas beberapa lajur dengan type anatara lain:
a) 1 jalur-2 lajur-2 arah (2/2 TB) b) 1 jalur-2 lajur-l arah (2/1 TB) c) 2 jalur-4 1ajur-2 arah (4/2 B) d) 2 jalur-n lajur-2 arah (n/2 B) Keterangan: TB = tidak terbagi.
B = terbagi
Gambar 2.4 Jalan 1 Jalur-2 Lajur-2 Arah (2/2 TB)
Sumber : Tata Cara Perencanaan Geometrik Jalan Antar Kota, Ditjen Bina Marga 1997.
Gambar 2.5 Jalan 1 Jalur-2 Lajur-l Arah (2/1 TB)
Sumber : Tata Cara Perencanaan Geometrik Jalan Antar Kota, Ditjen Bina Marga 1997.
Gambar 2.6 Jalan 2 Jalur-4 Lajur-2 Arah (4/2 B)
Sumber : Tata Cara Perencanaan Geometrik Jalan Antar Kota, Ditjen Bina Marga 1997.
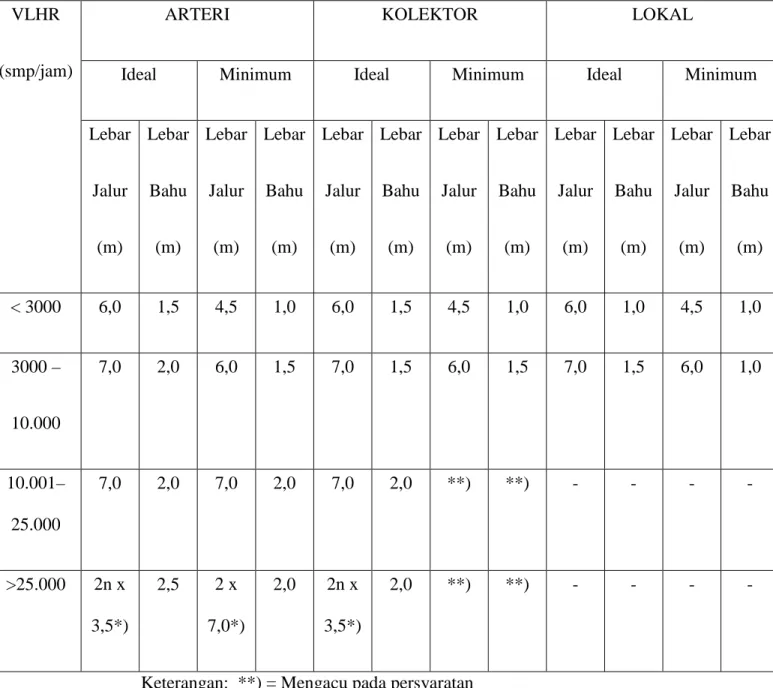
Tabel 2.7 Penentuan Lebar Jalur dan Bahu jalan VLHR
(smp/jam)
ARTERI KOLEKTOR LOKAL
Ideal Minimum Ideal Minimum Ideal Minimum
Lebar Jalur (m) Lebar Bahu (m) Lebar Jalur (m) Lebar Bahu (m) Lebar Jalur (m) Lebar Bahu (m) Lebar Jalur (m) Lebar Bahu (m) Lebar Jalur (m) Lebar Bahu (m) Lebar Jalur (m) Lebar Bahu (m) < 3000 6,0 1,5 4,5 1,0 6,0 1,5 4,5 1,0 6,0 1,0 4,5 1,0 3000 – 10.000 7,0 2,0 6,0 1,5 7,0 1,5 6,0 1,5 7,0 1,5 6,0 1,0 10.001– 25.000 7,0 2,0 7,0 2,0 7,0 2,0 **) **) - - - - >25.000 2n x 3,5*) 2,5 2 x 7,0*) 2,0 2n x 3,5*) 2,0 **) **) - - - -
Keterangan: **) = Mengacu pada persyaratan
*) = 2 jalur terbagi, masing – masing n × 3, 5m, dimana n jumlah lajur per jalur
- = Tidak ditentukan
Sumber : Tata Cara Perencanaan Geometrik Jalan Antar Kota, Ditjen Bina Marga 1997.
2.3.1.2 Lajur
Lajur adalah bagian jalur lalu lintas yang memanjang, dibatasi oleh marka lajur jalan, memiliki lebar yang cukup untuk dilewati suatu kendaraan bermotor sesuai kendaraan rencana. Lebar lajur tergantung pada kecepatan dan kendaraan rencana (Jotin Khisty, 2003).
2.3.1.2.1 Lebar Lajur Lalu Lintas
Lebar lajur lalu lintas merupakan bagian yang paling menentukan lebar melintang jalan secara keseluruhan (Sukirman, 1994). Besarnya lebar lajur lalu lintas hanya dapat ditentukan dengan pengamatan langsung dilapangan karena :
a. Lintasan kendaraan yang satu tidak mungkin akan dapat diikuti oleh lintasan kendaraan lain dengan tepat.
b. Lajur lalu lintas mungkin tepat sama degan lebar kendaraan maksimum. Untuk keamanan dan kenyamanan setiap pengemudi membutuhkan ruang gerak antara kendaraan.
c. Lintasan kendaraan tidak mengkin dibuat tetap sejajar sumbu lajur lalu lintas, karena selama bergerak akan mengalami gaya – gaya samping seperti tidak ratanya permukaan, gaya sentritugal ditikungan, dan gaya angin akibat kendaraan lain yang menyiap.
Lebar lajur lalu lintas merupakan lebar kendaraan ditambah dengan ruang bebas antara kendaraan yang besarnya sangat ditentukan oleh keamanan dan
kenyamanan yang diharapkan. Pada jalan lokal (kecepatan rendah) lebar jalan minimum 5,50 m (2 x 2,75) cukup memadai untuk jalan 2 jalur dengan 2 arah.
Dengan pertimbangan biaya yang tersedia, lebar 5 m pun masih diperkenankan.Jalan arteri yang direncanakan untuk kecepatan tinggi, mempunyai lebar lajur lalu lintas lebih besar dari 3,25 m sebaiknya 3,50 m.
Tabel 2.8 Lebar Lajur Jalan Ideal
FUNGSI KELAS LEBAR LAJUR
IDEAL (m)
Arteri I
II, III A
3,75 3,50
Kolektor III A, III B 3,00
Lokal III C 3,00
Sumber : Tata Cara Perencanaan Geometrik Jalan Antar Kota, Ditjen Bina Marga 1997.
2.3.1.2.2 Jumlah Lajur Lalu Lintas
Banyak lajur yang dibutuhkan sangat tergantung dari volume lalu lintas yang akan memakai jalan tersebut dan tingkat pelayanan jalan yang diharapkan.Empat lajur untuk satu arah untuk pada jalan tunggal adalah patokan maksimum yang diterima secara umum.Tetapi AASHTO 2001 memberikan sebuah kemungkinan terdapatnya
16 lajur pada jalan 2 arah terpisah.Kemiringan melintang jalur lalu lintas jalan lurus diperuntukkan untuk kebutuhan drainase jalan (Jotin Khisty, 2003). Air yang jatuh di atas permukaan jalan supaya cepat dialirkan ke saluran – saluran pembuangan. Kemiringan melintang jalan normal dapat dilihat pada gambar di bawah ini:
Gambar 2.7 Kemiringan melintang jalan normal
Sumber : Tata Cara Perencanaan Geometrik Jalan Antar Kota, Ditjen Bina Marga 1997.
2.3.1.3 Bahu Jalan
Bahu jalan atau tepian jalan adalah bagian jalan yang terletak di antara tepi jalan lalu lintas dengan tepi saluran, parit, kreb atau lereng tepi (Clarkson H.Oglesby,1999). AASHTO menetapkan agar bahu jalan yang dapat digunakan harus dilapisi perkerasan atau permukaan lainyang cukup kuat untuk dilalui kendaraan dan menyarankan bahwa apabila jalur jalan dan bahu jalan dilapisi dengan bahan aspal, warna dan teksturnya harus dibedakan.
Bahu jalan berfungsi sebagai :
1. Tempat berhenti sementara kendaraan
2. Menghindarkan diri dari saat-saat darurat sehingga dapat mencegah terjadinya kecelakaan
3. Memberikan sokongan pada konstruksi perkerasan jalan dari arah samping agar tidak mudah terkikis
4. Ruang pembantu pada waktu mengadakan pekerjaan parbaikan atau pemeliharaan jalan (Bina Marga, 1997).
2.3.1.3.1 Jenis Bahu Jalan
Berdasarkan tipe perkerasannya, bahu jalan dapat dibedakan atas :
a) Bahu yang tidak diperkeras, yaitu bahu yang hanya dibuat dari material perkerasan jalan tanpa bahan pengikat, bahu ini dipergunakan untuk daerah – daerah yang tidak begitu penting, dimana kendaraan yang berhenti dan mempergunakan bahu tidak begitu banyak jumlahnya.
b) Bahu yang diperkeras, yaitu bahu yang dibuat dengan mempergunakan bahan pengikat sehingga lapisan tersebut lebih kedap air dari pada bahu yang tidak diperkeras. Bahu dipergunakan untuk jalan – jalan dimana kendaraan yang akan berhenti dan memakai bagian tersebut besar jumlahnya
2.3.1.3.2 Lebar Bahu Jalan
Besarnya lebar bahu jalan dipengaruhi oleh :
a) Fungsi jalan; jalan arteri direncanakan untuk kecepatan yang lebih tinggi dibandingkan dengan jalan lokal. Dengan demikian jalan arteri membutuhkan kebebasan samping, keamanan, dan kenyamanan yang lebih besar, atau menuntut lebar bahu yang lebih besar dari jalan lokal.
b) Volume lalu lintas; volume lalu lintas yang tinggi membutuhkan lebar bahu yang lebih besar dibandingkan dengan volume lalu lintas yang lebih rendah. c) Kegiatan disekitar jalan.; Jalan yang melintasi daerah perkotaan, pasar,
sekolah, membutuhkan lebat bahu jalan yang lebih besar dari pada jalan yang melintasi daerah rural.
d) Ada atau tidaknya trotoar
e) Biaya yang tersedia; sehubungan dengan biaya pembebasan tanah, dan biaya untuk konstruksi (Jotin Kisty, 2003).
2.3.1.3.3 Lereng Melintang Bahu Jalan
Fungsi lereng melintang perkerasan jalan untuk mengalirkan air hujan sangat ditentukan oleh kemiringan melintang bagian samping jalur perkerasan itu sediri, yaitu kemiringan melintang bahu jalan (Sukirman, 1994). Kemiringan melintang bahu yang tidak baik ditambah pula dengan bahu dari jenis tidak diperkeras akan menyebabkan turunnya daya dukung lapisan perkerasan, lepasnya
ikatan antara agregat dan aspal yang akhirnya dapat memperpendek umur pelayanan jalan. Untuk itu, haruslah dibuat kemiringan bahu jalan yang sebesar – besarnya tetapi aman dan nyaman bagi pengemudi kendaraan. Kemiringan melintang jalur perkerasan jalan, yang dapat bervariasi sampai 6 % tergantung dari jenis permukaan bahu, intensitas hujan, dan kemungkinan penggunaan bahu jalan. Kemiringan bahu jalan normal antara 3 - 5%. dengan ketentuan seperti gambar di bawah ini.
Gambar 2.8 Bahu Jalan
Sumber : Tata Cara Perencanaan Geometrik Jalan Antar Kota, Ditjen Bina Marga 1997.
Gambar 2.9 Kombinasi Bahu Dengan Trotoar
Sumber : Tata Cara Perencanaan Geometrik Jalan Antar Kota, Ditjen Bina Marga 1997.
2.3.1.4 Median
Median adalah bagian bangunan jalan yang secara fisik memisahkan dua jalur lalu lintas yang berlawanan arah (Departemen Pemukiman dan Prasarana Wilayah, 2004).
Fungsi median adalah untuk:
a) Memisahkan dua aliran lalu lintas yang berlawanan arah b) Ruang lapak tunggu penyeberang jalan
c) Penempatan fasilitas jalan
d) Tempat prasarana kerja sementara e) Penghijauan
f) Tempat berhenti darurat (jika cukup luas) g) Cadangan lajur (jika cukup luas)
h) Mengurangi silau dari sinar lampu kendaraan dari arah yang berlawanan Median dapat dibedakan atas :
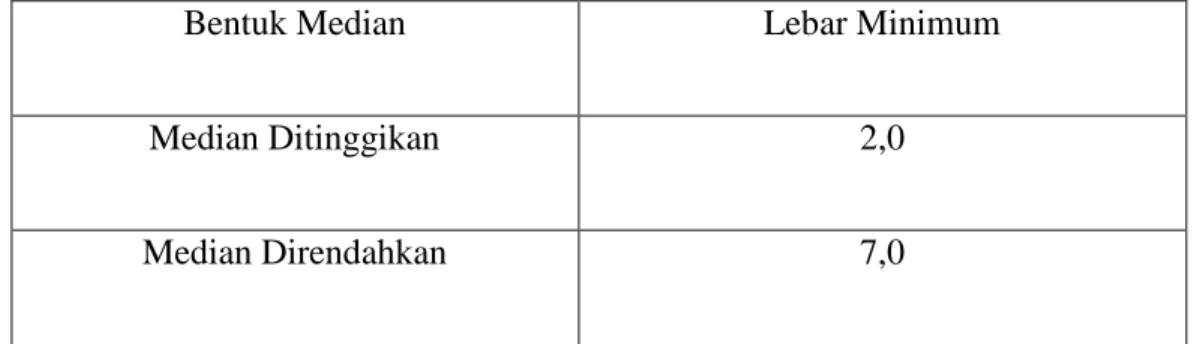
a) Median direndahkan, terdiri atas jalur tepian dan bangunan pemisah jalur yang direndahkan.
b) Median ditinggikan, terdiri atas jalur tepian dan bangunan pemisah jalur yang ditinggikan.
Lebar minimum median terdiri atas jalur tepian selebar 0,25-0,50 meter dan bangunan
Tabel 2.9 Lebar Minimum Median
Bentuk Median Lebar Minimum
Median Ditinggikan 2,0
Median Direndahkan 7,0
Sumber : Pedoman Konstruksi Bangunan, Departemen Pemukiman dan Prasarana Wilayah.2004
Gambar 2.10 Median Direndahkan
Sumber : Pedoman Konstruksi Bangunan, Departemen Pemukiman dan Prasarana Wilayah.2004
Gambar 2.11 Median Ditinggikan
Sumber : Pedoman Konstruksi Bangunan, Departemen Pemukiman dan Prasarana Wilayah.2004
2.3.1.5 Fasilitas Pejalan Kaki
Pejalan kaki adalah istilah dalam transportasi yang digunakan untuk menjelaskan orang yang berjalan di lintasan pejalan kaki baik dipinggir jalan, trotoar, lintasan khusus bagi pejalan kaki ataupun menyeberang jalan. Untuk melindungi pejalan kaki dalam berlalu lintas, pejalan kaki wajib berjalan pada bagian jalan dan menyeberang pada tempat penyeberangan yang telah disediakan bagi pejalan kaki.
Fasilitas pejalan kaki berfungsi memisahkan pejalan kaki dari jalur lalu lintas kendaraan guna menjamin keselamatan pejalan kaki dan kelancaran lalu lintas.Perlengkapan bagi para pejalan kaki sebagaimana pada kendaraan bermotor
sangat penting terutama di daerah perkotaan dan untuk jalan masuk ke atau keluar dari tempat tinggal (Clarkson H.Oglesby,1999).
2.3.2 Segmen/ Ruas Jalan 2.3.2.1 Panjang Bagian Lurus
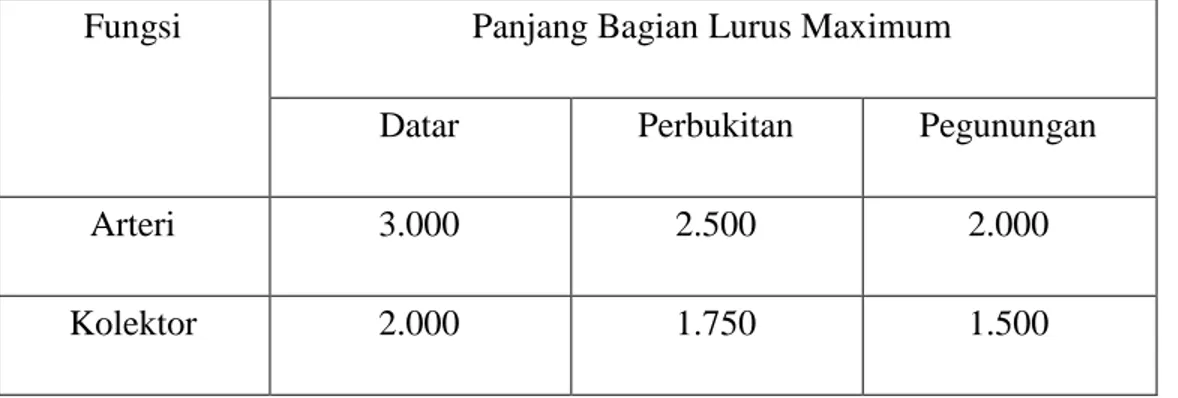
Dengan mempertimbangkan faktor keselamatan pemakai jalan, ditinjau dari segi kelelahan pengemudi, maka panjang maksimum bagian jalan yang lurus harus ditempuh dalam waktu tidak lebih dari 2,5 menit sesuai dengan tabel di bawah ini:
Tabel 2.10 Panjang Bagian Lurus Maksimum
Fungsi Panjang Bagian Lurus Maximum
Datar Perbukitan Pegunungan
Arteri 3.000 2.500 2.000
Kolektor 2.000 1.750 1.500
Sumber :Tata Cara Perencanaan Geometrik Jalan Antar Kota, Ditjen Bina Marga 1997
2.3.2.2 Jarak Pandang
Jarak pandang adalah jarak dimana pengemudi dapat melihat benda yang menghalanginya, baik yang bergerak maupun yang tidak bergerak dalam batas mana pengemudi dapat melihat dan menguasai kendaraan pada satu jalur lalu lintas. Jarak pandang bebas ini dibedakan menjadi dua bagian, yaitu : jarak pandang henti dan jarak pandang mendahului (Sony Sulaksono, 2001).
2.3.2.2.1 Jarak Pandang Henti ( JPH )
Jarak pandang henti (JPH) adalah jarak yang diperlukan untuk menghentikan kendaraan bila ada suatu halangan di tengah jalan (Sony Sulaksono, 2001).
Tabel 2.11 Persyaratan Jarak Pandangan Henti
VR (Km/Jam) 120 100 80 60 50 40 30 20
Jh minimum (m) 250 175 120 75 55 40 27 16
Sumber : Tata Cara Perencanaan Geometrik Jalan Antar Kota, Ditjen Bina Marga 1997.
2.3.2.2.2 Jarak Pandang Mendahului (JPM)
Jarak pandang mendahului (JPM) adalah jarak yang memungkinkan suatu kendaraan mendahului kendaraan lain di depannya dengan aman sampai kendaraan tersebut kembali ke lajur semula (Bina Marga,1997).
Tabel 2.12 Persyaratan Jarak Pandangan Mendahului
VR (Km/Jam) 120 100 80 60 50 40 30 20
Jd (m) 800 670 550 350 250 200 150 100
Sumber : Tata Cara Perencanaan Geometrik Jalan Antar Kota, Ditjen Bina Marga 1997.
2.3.2.2.3 Daerah Bebas Samping di Tikungan
Pada saat mengemudikan kendaraan pada kecepatan tertentu, ketersediaan jarak pandang yang baik sangat dibutuhkan apalagi sewaktu kendaraan menikung atau berbelok. Keadaan ini seringkali terganggu oleh gedung-gedung (perumahan penduduk), pepohonan, hutan-hutan kayu maupun perkebunan, tebing galian dan lain sebagainya.Oleh karena itu perlu adanya daerah bebas samping di tikungan untuk menjaga keamanan pemakai jalan (Jotin Khisty,2003).
Daerah bebas samping di tikungan adalah ruang untuk menjamin kebebasan pandang di tikungan sehingga jarak pandangan henti (Jh) dipenuhi. Daerah bebas samping dimaksudkan untuk memberikan kemudahan pandangan di tikungan dengan membebaskan objek-objek penghalang sejauh E (m) diukur dari garis tengah lajur dalam sampai objek penghalang pandangan sehingga persyaratan Jh dipenuhi ( Bina Marga 1997).
Jarak ini diperlukan untuk memenuhi syarat jarak pandang yang besarnya tergantung jari-jari (R), kecepatam rencana (V) dan keadaan lapangan. Terdapat dua kemungkinan keadaan, yaitu :
a) Jarak Pandang < Panjang Tikungan (Jh < Lt)
E = R ( 1 – cos ( R Jh π 0 90 ) )...2.4
Dimana : R = Jari – jari tikungan (m)
Lt = Panjang tikungan (m)
Gambar 2.12. Jarak Pandang < Panjang Tikungan (Jh < Lt)
Sumber : Tata Cara Perencanaan Geometrik Jalan Antar Kota, Ditjen Bina Marga 1997
Grafik 2.1 Jarak Penghalang (E), Dari Sumbu Lajur Sebelah Dalam
Tabel 2.13 berisi nilai E (m) untuk Jh<Lt, VR (km/jam) dan Jh (m)
Sumber : Tata Cara Perencanaan Geometrik Jalan Antar Kota, Ditjen Bina Marga 1997
b) Jarak Pandang > Panjang Tikungan (Jh > Lt) E = R ( 1 – cos ( R Jh π 0 90 ) ) + 2 1 ( Jh – Lt ) sin ( R Jh π 0 90 )...2.5
Dimana : R = Jari – jari tikungan (m)
Jh = Jarak pandang henti (m)
Lt = Panjang tikungan (m)
Gambar 2.13. Jarak Pandang > Panjang Tikungan (Jh > Lt)
Sumber : Tata Cara Perencanaan Geometrik Jalan Antar Kota, Ditjen Bina Marga 1997.
Tabel 2.14 Berisi Nilai E (m) Untuk Jh>Lt, VR (km/jam) dan Jh (m)
Sumber : Tata Cara Perencanaan Geometrik Jalan Antar Kota, Ditjen Bina Marga 1997
Tabel 2.15 Berisi nilai E (m) Untuk Jh>L, VR (km/jam) dan Jh (m), Dimana Jh - Lt = 50 m.
Sumber : Tata Cara Perencanaan Geometrik Jalan Antar Kota, Ditjen Bina Marga 1997
2.4 Persyaratan Alinemen 2.4.1 Alinemen Vertikal 2.4.1.1 Pengertian
Alinemen vertikal adalah proyeksi dari sumbu jalan pada suatu bidang vertikal yang melalui sumbu jalan tersebut.Alinemen vertikal terdiri atas bagian landai vertikal dan bagian lengkung vertikal (Sukirman, 1994). Ditinjau dari titik awal perencanaan, bagian landai vertikal dapat berupa landai positif (tanjakan), atau landai negatif (turunan), atau landai nol (datar).
2.4.1.2 Landai Maksimum
Landai Maksimum adalah landai vertikal maksimum dimana truk dengan muatan penuh masih mampu bergerak dengan penurunan kecepatan tidak lebih dari setengah kecepatan awal tanpa penurunan gigi rendah ( Sony Sulaksono, 2001) seperti pada tabel di bawah ini:
Tabel 2.16 Kelandaian maksimum yang diizinkan
VR (km/jam) 120 100 80 60 50 40 30 20
Kelandaian Maksimum (%) 3 3 4 5 8 9 10 10 Sumber : Tata Cara Perencanaan Geometrik Jalan Antar Kota, Ditjen Bina Marga 1997
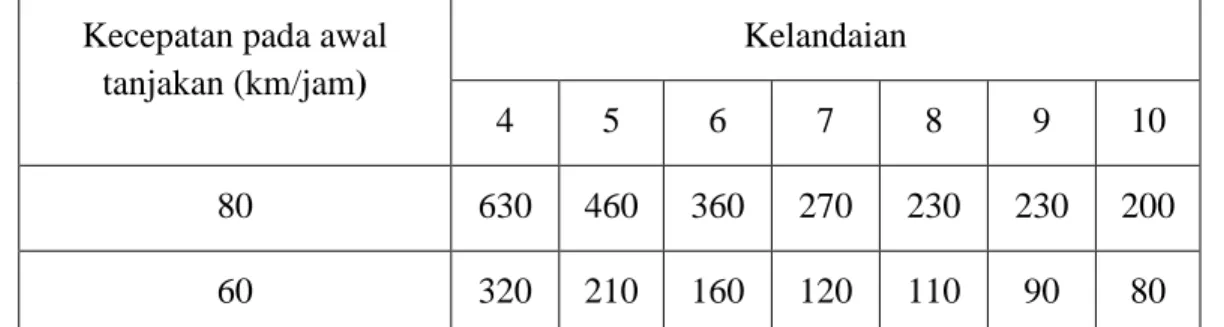
2.4.1.3 Panjang Kritis
Panjang kritis adalah panjang landai maksimum yang harus disediakan agar kendaraan dapat mempertahankan kecepatannya sedemikian rupa sehingga penurunan kecepatan tidak lebih dari kecepatan rencana (Sony Sulaksono, 2001).Lama perjalanan tersebut tidak boleh lebih dari satu menit.
Tabel 2.17 Panjang Kritis Kecepatan pada awal tanjakan (km/jam)
Kelandaian
4 5 6 7 8 9 10
80 630 460 360 270 230 230 200
60 320 210 160 120 110 90 80
Sumber : Tata Cara Perencanaan Geometrik Jalan Antar Kota, Ditjen Bina Marga 1997
2.4.1.4 Lengkung Vertikal
Lengkung vertikal harus disediakan pada setiap lokasi yang mengalami perubahan kelandaian dengan tujuan mengurangi goncangan akibat perubahan kelandaian dan menyediakan jarak pandang henti. Lengkung vertikal terdiri atas lengkung vertikal cembung dan lengkung vertikal cekung (Sony Sulaksono, 2001).
Panjang lengkung vertikal (LV) ditentukan dengan rumus sebagai berikut:
LV = 405 2 S A ……….………2.6
b. Jika jarak pandang henti lebih bear dari panjang lengkung vertikal cekung. LV = 2 S -
A 405
………..…………2.7
Panjang minimum lengkung vertikal dapat ditentukan dengan rumus:
LV = A Y………..………..2.8 LV = 405 S ………..2.9 Dimana:
LV = Panjang lengkung vertikal (m)
A = Perbedaan grade (m)
S = Jarak pandang henti (m)
Y = Faktor penampilan kenyamanan, didasarkan pada tinggi obyek 10 cm dan tinggi mata 120 cm.Nilai Y ini dapat diperoleh sesuai tabel berikut:
Tabel 2.18 Penentuan Faktor Penampilan Kenyamanan, Y
Kecepatan Rencana ( km/jam) Faktor Penampilan Kenyamanan, Y
< 40 1,5
40 - 60 3
>60 8
Sumber : Tata Cara Perencanaan Geometrik Jalan Antar Kota, Ditjen Bina Marga 1997
Panjang lengkung vertikal bisa ditentukan langsung sesuai tabel berikut didasarkan pada penampilan,kenyamanan dan jarak pandang.
Tabel 2.19 Panjang Minimum Lengkung Vertikal Kecepatan Rencana (km/jam) Perbedaan Kelandaian Memanjang (%) Panjang Lengkung (m) < 40 1 20 - 30 40 - 60 0,6 40 - 80 > 60 0,4 80 - 150
Sumber : Tata Cara Perencanaan Geometrik Jalan Antar Kota, Ditjen Bina Marga 1997
2.4.2 Alinemen Horizontal 2.4.2.1 Pengertian
Alinemen horizontal adalah proyeksi sumbu jalan pada bidang horizontal. Alinemen horizontal dikenal juga dengan nama “situasi jalan” atau “trase jalan”, yang terdiri dari garis-garis lurus yang dihubungkan dengan garis-garis lengkung. Garis lengkung tersebut dapat terdiri dari busur lingkaran ditambah busur peralihan, busur peralihan saja atau busur lingkaran saja (Sukirman, 1994). Alinemen horizontal terdiri atas bagian lurus dan bagian lengkung (disebut juga tikungan). Perencanaan geometrik pada bagian lengkung dimaksudkan untuk mengimbangi gaya sentrifugal yang diterima oleh kendaraan yang berjalan pada kecepatan VR.
2.4.2.2 Jari - Jari Tikungan
Jari - jari tikungan adalah nilai yang membatasi besar kelengkungan untuk kecepatan rencana tertentu dan ditentukan dari besar superelevasi maksimum dan faktor gesekan samping maksimum yanag dipilih untuk desain ( AASHTO 2001).
Bagian yang sangat kritis pada alinemen horizontal adalah bagian tikungan karena terdapat gaya yang akan melemparkan kendaraan keluar dari tikungan (gaya sentrifugal), hal tersebut harus diimbangi oleh komponen berat kendaraan yang diakibatkan oleh superelevasi dari jalan dan oleh gesekan samping (side friction) antara ban dan permukaan jalan. Hubungan antara kecepatan (V), jari-jari tikungan (R), kemiringan melintang/ superelevasi (e) dan gaya gesek samping antara ban dan
permukaan jalan (f) didapat dari hukum mekanika F = m.a (Hukum Newton II).Gaya
sentrifugal saat kendaraan bergerak di tikungan dengan persamaan gR
V
G 2
, dimana G
= berat kendaraan dan g = percepatan gravitasi. Dalam hal ini terdapat tiga keadaan keseimbangan, yaitu:
1. Stadium I : Gaya sentrifugal diimbangi gesekan ban Vs perkerasan..
K
Gambar 2.14 Gaya Sentrifugal Diimbangi Gesekan Ban Vs Perkerasan F max
G
FL FR
Penurunan Rumus: K = F max FL + FR = K ( NR + NL ) f = m . a G . f = g G . R V2 f = R g V . 2 , g = 9,8 2 s m g = 3600 1 1000 98 2 jam km g = 127.000 2 jam km f = R V . 12700 2
, R dalam satuan meter maka:
f = R V . 0 12700 2 . 1000 1 f = R V . 127 2
2. Stadium II : Gaya sentrifugal diimbangi hanya dengan kemiringan melintang jalan
Gambar 2.15 Gaya Sentrifugal Diimbangi Hanya Dengan Kemiringan Melintang Jalan Penurunan Rumus: F max = K G sin α = K cos α G sin α = m. a cos α G sin α = g G . R V2 cos α : G cos α tg α = gR V2 , g = 9,8 2 s m G sin α K cos α G K α
g = 3600 1 1000 98 2 jam km g = 127.000 jam km e = R V 000 . 127 2 . 1000 1 e = R V . 127 2
Sumber : Rekayasa jalan,Ir.Sony Sulaksono,M.Sc.
3. Stadium III : Gaya sentrifugal diimbangi dengan gaya gesek dan kemiringan melintang jalan
FR FL G sin α G K α K cosα G cos α NL NR
Gambar 2.16 Gaya Sentrifugal Diimbangi Dengan Gaya Gesek Dan Kemiringan Melintang Jalan Penurunan Rumus: F max = K ( FL + FR ) + G sin α = K cos α ( NL + NR ) f + G sin α= K cos α
G cos α. f + G sin α= m . g cos α
G cos α. f + G sin α= g G . R v2 cos α : G cos α. f + α α cos sin = R g V . 2 , g = 9,8 2 s m g = 3600 1 1000 98 2 jam km g = 127.000 jam km f + tg α = R V 000 127 2 . 1000 1 f + tg α = R V 127 2
f + e = R V 127 2
Sumber : Rekayasa jalan,Ir.Sony Sulaksono,M.Sc.
Dari ketiga keseimbangan di atas diperoleh kesimpulan yaitu:
Pada stadium I : Rmin =
fm V 127
2
...2.10
Pada stadium II : Rmin = m e V 127 2 ...2.11
Pada stadium III : Rmin =
) ( 127 2 m m f e V + ………..………..…2.12
Rumus dasar dari kendaraan yang melintasai tikungan menurut bina marga adalah sbb: e + f = R V 127 2 ...2.13 Dengan : e = Superelevasi
f = Faktor gesekan samping V = Kecepatan rencana (km/jam) R = Jari-jari tikungan (m )
Grafik 2.2 Koefisien Gesekan Melintang Maksimum Untuk Desain
Sumber : Buku Teknik Sipil, Ir. Sunggono KH.
Tabel 2.20 Rekomendasi AASHTO Untuk Koefisien Gesekan Samping
Kecepatan Rencana (mph) 20 30 40 50 60 70 80 Kecepatan Rencana (km/jam) 32 48 64 80 97 113 129 Koefisien 0,17 0,16 0,15 0,14 0,12 0,10 0,08
Sumber: Teknik Jalan Raya, Clarkson H.Oglesby
AASHTO 2001 memberikan rumusan untuk batasan basar jari jari minimum tersebut yaitu:
Rmin = ) 01 , 0 ( 127 max max 2 f e V + ...2.14 Dengan : e = superelevasi
f = faktor gesekan samping
V = kecepatan rencana (km/jam)
R = jari-jari tikungan (m)
Tabel 2.21 Panjang Jari-jari Minimum
VR (km/jam) 120 100 80 60 50 40 30 20
Jari-jari Minimum Rmin (m) 600 370 210 110 80 50 30 15
Jari-jari Minimum Tanpa Lengkung Peralihan (m)
2500 1500 900 500 350 250 130 60
Jari-jari Minimum Tanpa Superelevasi (m)
5000 2000 1250 700 - - - -
Sumber : Tata Cara Perencanaan Geometrik Jalan Antar Kota, Ditjen Bina Marga 1997.
Tabel 2.22 Jari-Jari Minimum Untuk Jalan Luar Kota, Jalan Tol, Jalan Perkotaan Berdasarkan Nilai e dan f
Kecepatan Rencana (Km/Jam) Superelevasi maximum (%) Koefisien Gesek (f) Total (e/100+f) Radius (m) Radius (Pembulatan) (m) 20 4,0 0,18 0,22 14,5 15 30 4,0 0,17 0,21 33,7 35 40 4,0 0,17 0,21 60,0 60 50 4,0 0,15 0,20 98,4 100 60 4,0 0,15 0,19 149,1 150 70 4,0 0,14 0,18 214,2 215 80 4,0 0,14 0,18 279,8 280 90 4,0 0,13 0,17 375,0 375 100 4,0 0,12 0,16 491,9 490 20 6,0 0,18 0,24 13,1 15 30 6,0 0,17 0,23 30,8 30 40 6,0 0,17 0,23 54,7 55 50 6,0 0,16 0,22 89,4 90 60 6,0 0,15 0,21 134,9 135 70 6,0 0,14 0,20 192,8 195 80 6,0 0,14 0,20 251,8 250 90 6,0 0,13 0,19 335,5 335 100 6,0 0,12 0,18 437,2 435 110 6,0 0,11 0,17 560,2 560 120 6,0 0,09 0,15 755,5 755 130 6,0 0,08 0,14 950,0 950 20 8,0 0,18 0,28 12,1 10 30 8,0 0,17 0,25 28,3 30 40 8,0 0,17 0,25 50,4 50 50 8,0 0,16 0,24 82,0 80 60 8,0 0,15 0,23 123,2 125 70 8,0 0,14 0,22 175,3 175 80 8,0 0,14 0,22 228,9 230 90 8,0 0,13 0,21 303,6 305 100 8,0 0,12 0,20 393,5 395 110 8,0 0,11 0,19 501,2 500 120 8,0 0,09 0,17 666,6 665 130 8,0 0,08 0,18 831,3 830 20 10,0 0,18 0,28 11,2 10 30 10,0 0,17 0,27 26,2 25 40 10,0 0,17 0,27 46,6 45 50 10,0 0,16 0,26 75,7 75
60 10,0 0,15 0,25 113,3 115 70 10,0 0,14 0,24 160,7 160 80 10,0 0,14 0,24 209,9 210 90 10,0 0,13 0,23 277,2 275 100 10,0 0,12 0,22 357,7 360 110 10,0 0,11 0,21 453,5 455 120 10,0 0,09 0,19 596,5 595 130 10,0 0,08 0,18 738,9 740 20 12,0 0,18 0,30 19,5 10 30 12,0 0,17 0,29 24,4 25 40 12,0 0,17 0,29 43,4 45 50 12,0 0,16 0,28 70,3 70 60 12,0 0,15 0,27 104,9 105 70 12,0 0,14 0,26 148,3 150 80 12,0 0,14 0,26 193,7 195 90 12,0 0,13 0,25 255,0 255 100 12,0 0,12 0,24 327,9 330 110 12,0 0,11 0,23 414,0 415 120 12,0 0,09 0,21 539,7 540 130 12,0 0,08 0,20 665,0 665 Sumber : A policy on Geometric Design of Highways And Streets, (AASHTO , 2001)
2.4.2.3 Menentukan Bentuk Tikungan
Berdasarkan jari-jari tikungan, maka tikungan atau disebut juga lengkung horizontal dapat dibagi dalam 3 (tiga) bentuk yaitu:
1. Bentuk Tikungan Full Circle (FC)
2. Bentuk Tikungan Spiral-Circle-Spiral (S-C-S) 3. Bentuk Tikungan Spiral-Spiral (S-S)
2.4.2.3.1 Bentuk Tikungan Full Circle (FC)
Bentuk tikungan full circle disebut juga bentuk busur lingkaran sederhana. Bentuk ini dipergunakan hanya pada lengkung yang mempunyai radius besar dan besar sudut tangent yang kecil. Adapun lengkung tikungan full circle seperti gambar 2.17 dibawah ini. Di Indonesia penggunaan bentuk full circle mempunyai batasan-batasan tertentu seperti pada tabel 2.23 di bawah ini.
Gambar 2.17 Lengkung Busur Lingkaran Sederhana (Full Circle) Sumber : Buku Teknik Sipil, Ir. Sunggono KH.
Tabel 2.23 Batasan-Batasan Dalam Bentuk Full Circle
Kecepatan Rencana (km/jam) Jari – Jari Lengkung Minimum (m)
120 2500
100 1500
60 500
50 350
40 250
30 130
20 60
Sumber : Tata Cara Perencanaan Geometrik Jalan Antar Kota, Ditjen Bina Marga 1997.
Untuk tikungan yang jari-jarinya lebih kecil daripada harga-harga di atas bentuk tikungan harus dipakai spiral - circle – spiral atau spiral – spiral.
Rumus-rumus untuk full circle menentukan T,L dan E adalah sebagai berikut:
tg 2 1 ∆= R T ………..…….2.15 Sehingga diperoleh: T = Rtg 2 1 ∆………..2.16 E = T tg 4 1 Δ ...2.17 E = ∆ 2 1 cos R - R ……….…….….2.18 L = 0 360 ∆ .2π.R………..…2.19
L = 0,01745.∆.R………...2.20
Dengan:
P.I = Point of intersection
V = Kecepatan rencana (km/jam) R = Jari-jari (m)
∆ = Sudut tangent (derajat) TC = Tangent circle
CT = Circle tangent
T = Jarak antara TC dan PI (m) L = Panjang bagian tikungan (m) E = Jarak PI ke bentuk lengkung (m)
2.4.2.3.2 Bentuk Tikungan Spiral - Circle - Spiral (S-C-S)
Ketika kendraan memasuki atau meninggalkan lengkungan horizontal melingkar, maka penambahan atau pengurangan gaya sentrifugal tidak dapat tercapai langsung karena faktor keselamatan dan kenyamanan.Dalam hal ini menyisipkan lengkungan transisi antara tangen dan lengkungan melingkar memerlukan pertimbangan (Jotin Khisty,2003).Lengkungan transisi yang dirancang dengan baik mempunyai keuntungan antara lain:
1. Sebuah rute alamiah dan mudah diikuti oleh pengemudi sehingga gaya sentrifugal meningkat atau berkurang secara bertahap seiiring kendaraan memasuki dan meninggalkan lengkungan melingkar.
2. Superelevasi dapat diatur sesuai keinginan dan lebih mudah. 3. Fleksibilitas dalam pelebaran lengkungan tajam.
4. Tampilan jalan raya yang lebih baik.
Lengkungan spiral merupakan peralihan dari bagian lurus ke bagian circle. Panjang lengkung peralihan (spiral) diperhitungkan dengan mempertimbangkan bahwa perubahan gaya sentripugal dari nol (pada bagian lurus) sampai sebesar :
K = Ls R V M . . 2 ………..…………...…2.21
Menurut Bina Marga 1997 lengkungan spiral dapat ditentukan dengan 3 rumus:
1. Berdasarkan antisipasi gaya sentrifugal
Ls min = 0,022. C R V3 - 2,727. C K V. …..……….…….…2.22 Dimana: Ls = Panjang spiral (m)
V = Kecepatan rencana (km/jam)
C = Perubahan kecepatan
K = Superelevasi
2. Berdasarkan waktu tempuh maksimum di lengkung peralihan
Ls = 6 , 3 V .T………..………2.23
Dimana: T = waktu tempuh pada lengkung peralihan, ditetapkan 3 detik.
V = kecepatan rencana (km/jam).
3. Berdasarkan tingkat pencapaian perubahan kelandaian
Ls = e n m r V e e 6 , 3 ). ( − ………..……2.24
Dimana: V = kecepatan rencana (km/jam)
em = superelevasi maximum
en = superelevasi normal
re = tingkat pencapaian perubahan kemiringan melintang jalan (%/detik)
Untuk VR ≤ 70 km/jam, re-max = 0.035 %/detik
Selain ketiga rumus diatas, untuk tujuan praktis Ls dapat ditetapkan dengan menggunakan tabel 2.24
Tabel 2.24 Panjang Lengkung Peralihan (Ls) dan Panjang Pencapaian Superelevasi (Le) Untuk Jalan l Jalur-2 Lajur-2 Arah.
VR (km/jam) Superelevasi (%) 2 4 6 8 10 Ls Le Ls Le Ls Le Ls Le Ls Le 20 30 40 10 20 15 25 15 25 25 30 35 40 50 15 25 20 30 20 30 30 40 40 50 60 15 30 20 35 25 40 35 50 50 60 70 20 35 25 40 30 45 40 55 60 70 80 30 55 40 60 45 70 65 90 90 120 90 30 60 40 70 50 80 70 100 100 130 100 35 65 45 80 55 90 80 110 110 145 110 40 75 50 85 60 100 90 120 - - 120 40 80 55 90 70 110 95 135 - -
Sumber : : Tata Cara Perencanaan Geometrik Jalan Antar Kota, Ditjen Bina Marga 1997.
Menurut AASHTO 2001 lengkung spiral dapat ditentukan dengan rumus: Ls = C R V3 0214 , 0 ………..2.25
Dimana: Ls = Panjang minimum lengkung spiral (m) R = Jari – jari tikungan (m)
V = Kecepatan Rencana (km/jam) C = Perubahan Percepatan (1,2 m/s2)
Bentuk tikungan Spiral - Circle - Spiral (S-C-S) dapat dilihat pada gambar di bawah ini:
Gambar 2.18. Bentuk Tikungan Spiral - Circle – Spiral ( S – C – S ) Sumber : Buku Teknik Sipil, Ir. Sunggono KH.
Jari-jari circle yang diambil harus sesuai dengan kecepatan rencana yang ditentukan serta tidak mengakibatkan adanya kemiringan tikungan yang melebihi harga maksimum. Kemiringan tikungan maksimum menurut bina marga dibedakan menjadi 2 (dua) bagian yaitu:
1. Untuk jalan antar kota, kemiringan tikungan maksimumnya 10 % 2. Untuk jalan kota, kemiringan tikungan maksimumnya 8 %
Rumusan-rumusan untuk Spiral - Circle – Spiral (lihat gambar 2.18)
Ts = (R+P) tg 2 1 ∆+ K………...…2.26 Es = ∆ + . 2 1 cos ) (R P - R………....……….……2.27 ∆= ∆−2θs………...……….…...………2.28 Lc = 0 360 ∆ .2π.R………...………...……2.29 Yc = Rc Ls 6 2 ………...……….2.30 Y = Ls Rc L 6 3 ……….….2.31
Xc = Ls - 2 3 40Rc Ls ………...………..2.32 X = L - 2 2 5 40Rc Ls L ………...……….…..2.33 P = Yc – Rc ( 1 – cos θS)……….2.34 K = Xc – Rc sin θ………....2.35 L = Lc + 2.Ls...2.36 Dimana:
P.I = Point of intersection
d = Jarak PI ke PI yang lain (m)
V = Kecepatan rencana (km/jam)
∆ = Sudut tangent (derajat)
R = Jari-jari (m)
θЅ = Sudut lengkung spiral (derajat)
Ls = Panjang lengkung spiral (m)
e = Kemiringan melintang (%)
D= R 0 4 , 1432 ... 2.37
R atau D yang telah ditetapkan, lihat tabel emax
R atau V didapat : e = ……… (%)
Ls = ……… (m)
Selanjutnya lihat tabel untuk lengkung spiral :
Ls = ……… (m) : didapat harga : θЅ = ………...…(derajat)
R = ……… (m) P = …………...………...… (m)
K =……… (m)
Apabila Lc < 20 m, maka bentuk tikungannya adalah spiral-spiral (S-S). Tabel 2.25 Perhitungan e, b dan Ls mínimum
R dalam meter
Vr = 20 km/jam Vr = 30km/jam Vr = 40km/jam e ( %) b’ (m) Ls min e ( %) b’ (m) Ls min e ( %) b’ (m) Ls min 400 2.0 0.50 25 360 2.7 0.50 25 320 2.5 0.50 25 300 2.7 0.50 25 280 2.9 0.50 25 240 3.4 0.50 25
200 2.2 0.50 20 4.0 0.75 25 180 2.5 0.50 20 4.4 0.75 30 160 2.8 0.75 20 4.9 0.75 30 140 3.2 0.75 20 5.5 0.75 30 130 3.4 0.75 20 5.8 0.87 30 120 3.7 0.75 20 6.2 1.00 40 100 4.5 1.00 25 7.2 1.00 40 90 5.0 1.00 25 7.6 1.00 40 85 2.0 80 2.1 5.6 1.00 25 8.8 1.25 40 75 2.2 70 2.4 6.3 1.25 30 9.4 1.25 50 65 2.5 60 2.6 1.000 15 7.1 1.25 30 9.9 1.50 50 55 2.8 1.000 15 50 2.9 1.000 15 8.0 1.50 40 1.50 50 45 3.0 1.000 15 8.4 1.50 40 40 3.1 1.500 15 8.9 1.75 40 35 3.2 1.500 20 9.4 2.00 40 30 3.4 1.500 20 9.8 2.25 25 3.5 1.500 20 20 3.6 1.500 20 15 4.0 3.700 20
5 4.0 3.700 20
Sumber : Buku Teknik Sipil, Ir. Sunggono K
Tabel 2.26 Perhitungan e dan Ls minimum (Untuk Rural Highway,2 jalur, emax =10%) R (m) V = 60 Km/Jam V = 80 Km/Jam V = 100 Km/Jam V = 120 Km/Jam e Ls e Ls e Ls e Ls 5730 LN 0 LN 0 LP 60 LN 0 2864 LN 0 LP 50 LP 60 0,022 80 1910 LP 40 LP 50 0,023 60 0,033 80 1432 LP 40 0,022 50 0,030 60 0,044 80 1150 LP 40 0,028 50 0,038 60 0,055 80 956 0,021 40 0,034 50 0,045 60 0,065 80 840 0,025 40 0,039 50 0,050 60 0,074 90 717 0,028 40 0,045 50 0,060 70 0,082 100 560 0,035 40 0,057 50 0,075 80 0,100 110 478 0,040 40 0,064 60 0,087 90 410 0,047 40 0,074 60 0.096 100 350 0,053 40 0,081 70 0,100 100 319 0,057 50 0,087 70 287 0,062 50 0,091 70 239 0,071 50 0,098 80
210 0,079 60 0,100 80 180 0,086 60 160 0,091 60 143 0,096 70 130 0,097 70 120 0,099 70 115 0,100 70
Keterangan : Ln = Lereng normal
Lp = Lereng luar diputar sehingga perkerasan mendapat kemiringan melintang sebesar lereng normal
Sumber : Buku Teknik Sipil, Ir. Sunggono K
2.4.2.3.3 Bentuk Tikungan Spiral – Spiral ( S-S)
Bentuk tikungan spiral-spiral disebut juga lengkung horizontal berbentuk spiral adalah lengkung busur lingkaran (circle) sehingga titik SC berimpit dengan. titik CS. Panjang besar lingkaran Lc = 0, dan θЅ = 12∆yang dipilih harus sesuai sehingga Ls yang dibutuhkan lebih besar dari Ls yang dihasilkan landai relatif minimum yang diisyaratkan.
Gambar 2.19 Lengkung Spiral – Spiral ( S-S) Sumber : Buku Teknik Sipil, Ir. Sunggono KH
Rumus-rumus yang digunakan pada tikungan spiral-spiral sama dengan rumus-rumus untuk tikungan spiral - circle – spiral hanya perlu diingat bahwa:
∆C=0 ∆ = 2 θs Lc = 0 Lc = 0 L = 2 Ls L= 0 360 2π∆R Ls = 648 , 28 .R s θ ………...………..2..38
Dengan mengambil harga P* dan K* dari tabel J.Barnett untuk Ls = 1 diperoleh harga :
P = P* . Ls………....……2.39
K= K* . Ls………...………...…….……2.40
Ts = (R+P) 2 1 ∆+K………..………..…...…...2.41 Es = ∆ + . 2 1 cos ) (R P - R………..………...…...2.42 2.4.2.4 Superelevasi
Superelevasi adalah suatu kemiringan melintang di tikungan yang berfungsi untuk mengimbangi gaya sentrifugal yang diterima kendaraan pada saat berjalan melalui tikungan pada kecepatan rencana (Clarkson H.Oglesby,1999).
Diagram superelevasi adalah suatu diagram yang dimaksudkan sebagai cara untuk menggambarkan pencapaian kemiringan melintang penuh (superelevasi). Superelevasi maksimum yanag digunakan pada jalan raya dipengaruhi oleh empat faktor antara lain :kondisi iklim (yaitu: frekuensi dan jumlah salju dan es), kondisi medan (misalnya: datar, bukit, atau pegunungan),jenis wilayah (yaitu:pedesaan atau perkotaan), dan frekuensi kendaraan yang bergerak sangat lambat (AASHTO 2001). Pada diagram superelevasi dapat kita bedakan antara diagram kemiringan melintang untuk jalan raya tanpa median dan jalan raya yang median.
Pada jalan raya tanpa median, perubahan profil melintang (superelevasi) dapat dilakukan dengan tiga cara yaitu :
1. Mengambil sumbu jalan sebagai sumbu putar.
2. Mengambil tepi perkerasan sebelah dalam sebagai sumbu putar.
3. Mengambil tepi perkerasan sebelah luar sebagai sumbu putar
Dari ketiga cara tersebut, yang sering dipakai di Indonesia adalah cara pertama.
Gambar 2.20 As atau Sumbu Jalan Sebagai Sumbu Putar
Sumber : : Tata Cara Perencanaan Geometrik Jalan Antar Kota, Ditjen Bina Marga 1997.
Sumber : : Tata Cara Perencanaan Geometrik Jalan Antar Kota, Ditjen Bina Marga 1997.
Gambar 2.22 Tepi Perkerasan Sebelah Luar Sebagai Sumbu Putar Sumber : : Tata Cara Perencanaan Geometrik Jalan Antar Kota, Ditjen Bina Marga 1997.
Untuk jalan raya dengan median (jalan raya terpisah) dalam mencapai kemiringan tergantung dari lebar dan bentuk penampang melintang median serta dapat dilakukan dengan 3 cara yaitu :
1. Dengan mengambil sisi – sisi sebelah dalam perkerasan sebagai sebagai sumbu putar ( median tetap dibuat datar ).
2. Dengan mengambil sisi – sisi sebelah luar dari jalur jalan sebagai sumbu putar
3. Dengan mengambil sumbu putar masing – masing jalur sendiri – sendiri ( sumbu putar tersebut bisa as atau tepi perkerasan tanpa memperhatikan median).
Dari ketiga cara tersebut yang sering digunakan adalah cara ketiga.
Gambar 2.23 Mengambil Sisi – Sisi Sebelah Dalam Perkerasan Sebagai Sumbu Putar
Sumber : : Tata Cara Perencanaan Geometrik Jalan Antar Kota, Ditjen Bina Marga 1997.
Gambar 2.24 Mengambil Sisi – Sisi Sebelah Luar dari Jalur Jalan Sebagai Sumbu Putar
Sumber : : Tata Cara Perencanaan Geometrik Jalan Antar Kota, Ditjen Bina Marga 1997.
Gambar 2.25 Mengambil Sumbu Putar Masing – Masing Jalur Sendiri – Sendiri Sumber : : Tata Cara Perencanaan Geometrik Jalan Antar Kota, Ditjen Bina
Marga 1997.
AASHTO 2001 memberikan batasan superelevasi maksimum pada jalan luar kota adalah 0,10.Bila kemungkinan terjadi hujan es dan salju, harga maksimum ini berkurang menjadi 0,08. Pada daerah perkotaan harga maksimumnya hanya 0,06 atau bahkan 0,04 sedangkan bina marga memberikan batasan superelevasi maksimum untuk jalan luar kota sebesar 10 % dan jalan kota sebesar 8 %.
Tabel 2.27 Kemiringan Melintang Maksimum (e max) 4 %
Tabel 2.28 Kemiringan Melintang Maksimum (e max) 6 %
Tabel 2.29 Kemiringan Melintang Maksimum (e max) 8 %
Tabel 2.30 Kemiringan Melintang Maksimum (e max) 10 %
Tabel 2.31 Kemiringan Melintang Maksimum (e max) 12 %
Grafik 2.3 Superelevasi Rencana Untuk Superelevasi Maksimum 4 %
Sumber : A policy on Geometric Design of Highways And Streets, (AASHTO , 2001) Grafik 2.4 Superelevasi Rencana Untuk Superelevasi Maksimum 6 %
Sumber : A policy on Geometric Design of Highways And Streets, (AASHTO , 2001)
Grafik 2.5 Superelevasi Rencana Untuk Superelevasi Maksimum 8 %
Sumber : A policy on Geometric Design of Highways And Streets, (AASHTO , 2001).
Sumber : A policy on Geometric Design of Highways And Streets, (AASHTO , 2001)
Sumber : A policy on Geometric Design of Highways And Streets, (AASHTO , 2001)
Pada tikungan dengan bentuk circle (full circle) perubahan kemiringan melintang dilakukan diluar lengkung lingkaran. Di tikungan ini kita kenal lengkung
Grafik 2.7 Superelevasi Rencana Untuk Superelevasi maksimum 12 %
peralihan fiktif (Ls’) dimana perubahan kemiringan dilakukan sejauh 2 3Ls’ dari titik awal TC pada garis (jalan) lurus dan kemiringan melintang maksimum dimulai sejauh 1 Ls’ dari titik awal CT ke dalam lingkaran. 3
Lengkung peralihan dapat dihitung besarnya dengan rumus sebagai berikut:
' Ls b < m 1 ...2.43 Dengan :
b = b (en + e max relatif )
1/m = landai ralatif antara tepi perkerasan
Ls’ = panjang lengkung peralihan relatif
b = lebar jalur 1 arah (m)
Tabel 2.32 Landai Relatif Berdasarkan Kecepatan Rencana Kecepatan Rencana
(km/jam)
Landai Relatif Maksimum (Bina Marga Luar Kota)
20 1/50
30 1/75
40 1/100
50 1/115
80 1/150
100 -
Sumber : Dasar-Dasar Perencanaan Geometrik Jalan,Silvia Sukirman
Gambar diagram superelevasi dari masing – masing bentuk tikungan dapat dlihat pada gambar di bawah ini:
Sumber : Rekayasa jalan,Ir.Sony Sulaksono,M.Sc
.
Gambar 2.27 Diagram Superelevasi Untuk Spiral – Circle – Spiral Sumber : Rekayasa jalan,Ir.Sony Sulaksono,M.Sc
Gambar 2.28 Diagram Superelevasi Untuk Spiral –Spiral Sumber : Rekayasa jalan,Ir.Sony Sulaksono,M.Sc
2.4.2.5 Pelebaran Perkerasan Pada Tikungan
Pelebaran perkerasan pada tikungan direncanakan untuk menghindari kendaraan yang bergerak dari jalan lurus menuju ke tikungan tidak mengalami off tracking (keluar jalur) tepatnya lintasan roda belakang pada saat membelok (Clarkson H.Oglesby,1999).
Pelebaran pada tikungan dimaksudkan untuk mempertahankan konsistensi geometrik jalan agar kondisi operasional lalu lintas di tikungan sama dengan dibagian lurus. Pada jalan dua lajur sebaiknya terdapat pelebaran jalan,terutama pada tikungan tajam karena hal-hal sebaga berikut:
1. Kecenderungan pengemudi terlempar keluar dari tepi perkerasan.
2. Meningkatnya lebar efektif kendaraan karena ban depan dan belakang tidak melintasi satu garis.
3. Pertambahan lebar karena posisi kendaraan yang miring terhadap as jalan ( Mannering, 1990).
Pelebaran jalan di tikungan menurut bina marga mempertimbangkan:
1. Kesulitan pengemudi untuk menempatkan kendaraan tetap pada lajurnya. 2. Penambahan lebar (ruang) lajur yang dipakai saat kendaraan melakukan
gerakan melingkar. Dalam segala hal pelebaran di tikungan harus memenuhi gerak perputaran kendaraan rencana sedemikian sehingga proyeksi kendaraan tetap pada lajurnya.
3. Pelebaran di tikungan ditentukan oleh radius belok kendaraan rencana dan besarnya ditetapkan sesuai Tabel 2.33
4. Pelebaran yang lebih kecil dari 0.6 meter dapat diabaikan.
5. Untuk jalan 1 jalur 3 lajur, nilai-nilai dalam Tabel 2.33 harus dikalikan 1,5. 6. Untuk jalan 1 jalur 4 lajur, nilai-nilai dalam Tabel 2.33 harus dikalikan 2.
2.33 Lebar Jalur 2 x 3.50m, 2 Arah Atau 1 Arah. R
(m)
Kecepatan Rencana, VR (Km/Jam)
50 60 70 80 90 100 110 120 1500 0,0 0,0 0,0 0,0 0,0 0,0 0,0 0,1 1000 0,0 0,0 0,1 0,1 0,1 0,1 0,2 0,2 750 0,0 0,0 0,1 0,1 0,1 0,2 0,3 0,3 500 0,2 0,3 0,3 0,4 0,4 0,5 0,5 400 0,3 0,3 0,4 0,4 0,5 0,5 300 0,3 0,4 0,4 0,5 0,5 250 0,4 0,5 0,5 0,6 200 0,6 0,7 0,8 150 0,7 0,8 140 0,7 0,8 130 0,7 0,8
120 0,7 0,8 110 0,7 100 0,8 90 0,8 80 1,0 70 1,0
Sumber : : Tata Cara Perencanaan Geometrik Jalan Antar Kota, Ditjen Bina Marga 1997.
(Lanjutan) Pelebaran di tikungan per Lajur (m)
Tabel 2.33 Lebar Jalur 2 x 3.00m, 2 Arah Atau 1 Arah R
(m)
Kecepatan Rencana, VR (Km/Jam)
50 60 70 80 90 100 110 1500 0,3 0,4 0,4 0,4 0,4 0,5 0,6 1000 0,4 0,4 0,4 0,5 0,5 0,5 0,6 750 0,6 0,6 0,7 0,7 0,7 0,8 0,8 500 0,8 0,9 0,9 1,0 1,0 1,1 1,1 400 0,9 1,0 1,0 1,0 1,1 1,1 300 0,9 1,1 1,0 1,1 250 1,0 1,3 1,1 1,2
200 1,2 1,4 1,3 1,3 150 1,3 1,4 140 1,3 1,4 130 1,3 1,4 120 1,3 1,4 110 1,3 100 1,4 90 1,4 80 1,6 70 1,7
Sumber : : Tata Cara Perencanaan Geometrik Jalan Antar Kota, Ditjen Bina Marga 1997.
R
(m)
Lebar Jalan = 7,2 m Lebar Jalan = 6,6 m Lebar Jalan = 6,0 m
Kecepatan Rencana Kecepatan Rencana Kecepatan Rencana
50 60 70 80 90 100 50 60 70 80 90 100 50 60 70 80 90 100 3000 0,0 0,0 0,0 0,0 0,0 0,0 0,2 0,2 0,3 0,3 0,3 0,3 0,5 0,5 0,5 0,6 0,6 0,6 2500 0,0 0,0 0,0 0,0 0,0 0,0 0,2 0,3 0,3 0,3 0,3 0,3 0,5 0,5 0,6 0,6 0,6 0,6 2000 0,0 0,0 0,0 0,0 0,0 0,1 0,3 0,3 0,3 0,3 0,3 0,4 0,6 0,6 0,6 0,6 0,6 0,7 1500 0,0 0,0 0,1 0,1 0,1 0,1 0,3 0,3 0,4 0,4 0,4 0,4 0,6 0,6 0,7 0,7 0,7 0,7 1000 0,1 0,1 0,1 0,2 0,2 0,2 0,4 0,4 0,4 0,5 0,5 0,5 0,7 0,7 0,7 0,8 0,8 0,8 900 0,1 0,1 0,2 0,2 0,2 0,3 0,4 0,4 0,5 0,5 0,5 0,6 0,7 0,7 0,8 0,8 0,8 0,8 800 0,1 0,1 0,2 0,2 0,2 0,3 0,4 0,4 0,5 0,5 0,6 0,6 0,7 0,8 0,8 0,8 0,9 0,9 700 0,2 0,2 0,2 0,3 0,3 0,3 0,5 0,5 0,5 0,6 0,6 0,7 0,8 0,8 0,8 0,9 0,9 1,0 600 0,2 0,3 0,3 0,3 0,4 0,4 0,5 0,6 0,6 0,6 0,7 0,7 0,8 0,9 0,9 0,9 1,0 1,0 500 0,3 0,3 0,4 0,4 0,5 0,5 0,6 0,6 0,7 0,7 0,8 0,8 0,9 0,9 1,0 1,0 1,1 1,1 400 0,4 0,4 0,5 0,5 0,6 0,6 0,7 0,7 0,8 0,8 0,9 0,9 1,0 1,0 1,1 1,1 1,2 1,2