ROBOT PEMOTONG RUMPUT OTOMATIS DENGAN
MENGGUNAKAN LOGIKA
FUZZY
LAPORAN TUGAS AKHIR
Oleh:
MASAYU SETTY RAHMADANI
102116036
FAKULTAS TEKNOLOGI INDUSTRI
PROGRAM STUDI TEKNIK ELEKTRO
UNIVERSITAS PERTAMINA
2020
Universitas Pertamina - i
LEMBAR PENGESAHAN
Judul Tugas Akhir
:
Robot Pemotong Rumput Otomatis
dengan Menggunakan Logika
Fuzzy
Nama Mahasiswa
:
Masayu Setty Rahmadani
Nomor Induk Mahasiswa
:
102116036
Program Studi
:
Teknik Elektro
Fakultas
:
Fakultas Teknologi Industri
Tanggal Lulus Sidang Tugas Akhir :
1 September 2020Jakarta, 14 September 2020
MENGESAHKAN
Pembimbing I
:
Nama : Aulia Rahma Annisa, M.T
NIP
: 116057
Pembimbing II
:
Nama : Dr. Eng. Wahyu Kunto Wibowo
NIP
: 116059
MENGETAHUI,
Ketua Program Studi Teknik Elektro
Dr. Eng. Wahyu Kunto Wibowo
NIP. 116059
FINAL ACC: 200914 PROSES YUDISIUM
Universitas Pertamina - ii
LEMBAR PERNYATAAN
Dengan ini saya menyatakan bahwa Tugas Akhir berjudul “Robot Pemotong
Rumput Otomatis dengan Menggunakan Logika
Fuzzy
”
ini adalah benar-benar
merupakan hasil karya saya sendiri dan tidak mengandung materi yang ditulis oleh
orang lain kecuali telah dikutip sebagai referensi yang sumbernya telah dituliskan
secara jelas sesuai dengan kaidah penulisan karya ilmiah.
Apabila dikemudian hari ditemukan adanya kecurangan dalam karya ini, saya
bersedia menerima sanksi dari Universitas Pertamina sesuai dengan peraturan yang
berlaku.
Demi pengembangan ilmu pengetahuan, saya menyetujui untuk memberikan
kepada Universitas Pertamina hak bebas royalti noneksklusif (
non-exclusive
royalty-free right
) atas Tugas Akhir ini beserta perangkat yang ada. Dengan hak
bebas royalti noneksklusif ini Universitas Pertamina berhak menyimpan, mengalih
media/format-kan, mengelola dalam bentuk pangkatan data (
database
), merawat,
dan mempublikasikan Tugas Akhir saya selama tetap mencantumkan nama saya
sebagai penulis/pencipta dan sebagai pemilik Hak Cipta.
Demikian pernyataan ini saya buat dengan sebenarnya
Jakarta, 25 Agustus 2020
Yang membuat pernyataan,
Universitas Pertamina - iii
ABSTRAK
Masayu Setty Rahmadani. 102116036. Robot Pemotong Rumput Otomatis
dengan Menggunakan Logika
Fuzzy
.
Pada tugas akhir ini dilakukan perancangan sistem pada prototipe robot pemotong
rumput agar dapat melakukan pemotongan rumput secara otomatis dengan
menggunakan metode logika fuzzy. Robot bergerak secara otomatis dengan
pergerakan zig-zag. Robot akan bergerak maju hingga mendeteksi halangan di
depannya. Robot akan berhenti ketika mendeteksi halangan dengan jarak sebesar
±30cm. Pembacaan jarak pada robot akan dideteksi oleh sensor ultrasonik.
Kemudian, robot akan mendeteksi sudut untuk menyempurnakan respon
pergerakan belok robot. Pembacaan sudut pada robot akan dideteksi oleh sensor
kompas. Robot pemotong rumput ini juga dilengkapi dengan Liquid Crystal
Display (LCD) untuk menampilkan nilai jarak yang terdeteksi oleh sensor
ultrasonik dan waktu pemotongan rumput. Robot pemotong rumput otomatis
dikontrol dengan menggunakan logika Fuzzy. Logika
fuzzy
pada robot ini
digunakan untuk mengontrol kecepatan putaran motor DC pada roda robot
pemotong rumput berdasarkan jarak yang terdeteksi oleh sensor ultrasonik.
Pembacaan jarak yang terdeteksi oleh sensor ultrasonik ini, akan menjadi nilai
masukan untuk proses fuzzifikasi. Nilai keluaran dari proses fuzzy ini berupa nilai
kecepatan motor dc pada masing-masing roda ban. Berdasarkan pengujian yang
telah dilakukan, jarak yang terdeteksi oleh sensor ultrasonik mempengaruhi
kecepatan putaran motor dc pada roda robot. Semakin dekat jarak robot dengan
halangan maka kecepatan robot akan semakin melambat. Sedangkan, semakin jauh
jarak robot dengan halangan, maka kecepatan robot akan semakin cepat.
Universitas Pertamina - iv
ABSTRACT
Masayu Setty Rahmadani. 102116036.
Automatic Lawnmower Robot Using
Fuzzy Logic.
The purpose of this final project is to create a lawnmower robot prototype that can
cut grass automatically using the fuzzy logic method. The robot moves
automatically with a zigzag movement. The robot will move forward until it detects
an obstacle in front of it. The robot will stop when it detects an obstacle with a
distance of ± 30cm. The distance reading on the robot will be detected by ultrasonic
sensors. Then, the robot will detect the angle to perfect the robot's turning response.
The angle reading on the robot will be detected by the compass sensor. This
lawnmower robot is also equipped with a Liquid Crystal Display (LCD) to display
the distance value detected by the ultrasonic sensor and the time of mowing. The
lawnmower robot is automatically controlled using Fuzzy logic. The fuzzy logic in
this robot is used to control the rotation speed of the DC motor on the lawnmower
robot wheel based on the distance detected by the ultrasonic sensor. The distance
reading detected by this ultrasonic sensor will be the input value for the
fuzzification process. The output value of this fuzzy process is a DC motor speed
value at each tire wheel. Based on the tests that have been done, the distance
detected by the ultrasonic sensor affects the rotational speed of the dc motor on the
robot wheel. The closer the robot to the obstacle, the slower the robot's speed will
be. Meanwhile, the farther the robot from the obstacle, the faster the robot's speed
will be.
Universitas Pertamina - v
KATA PENGANTAR
Puji syukur kehadirat Tuhan Yang Maha Esa karena berkat rahmat dan
anugerah-Nya, Laporan Tugas Akhir Mahasiswa Program Studi Teknik Elektro, Fakultas
Teknologi Industri, Universitas Pertamina – Jakarta yang berjudul “Robot
Pemotong Rumput Otomatis dengan Menggunakan Logika
Fuzzy
” dapat
diselesaikan. Proses pengerjaan laporan tugas akhir ini tidak lepas dari bantuan
banyak pihak. Adapun ucapan terima kasih diberikan kepada:
1.
Kedua orang tua serta adik saya yang selalu memberikan dukungan berupa moral
dan materil dalam mengerjakan tugas akhir.
2.
Ibu Aulia Rahma Annisa, M.T dan Bapak Dr. Eng Wahyu Kunto Wibowo
selaku Dosen Pembimbing yang telah berkontribusi besar meluangkan waktu,
pikiran untuk membimbing, memberikan kritik dan saran, arahan serta semangat
dalam penyusunan laporan tugas akhir ini.
3.
Bapak Dr. Eng. Wahyu Kunto Wibowo, M.T., selaku Ketua Program Studi
Teknik Elektro, Universitas Pertamina dan dosen wali yang memberikan
masukan dan dukungan dalam mengerjakan tugas akhir.
4.
Seluruh dosen Teknik Elektro Universitas Pertamina yang senantiasa
membagikan ilmunya selama masa studi.
5.
Rizky Aria Darmawan yang telah mendukung dan membantu dalam proses
penyelesasian Tugas Akhir ini.
6.
Teman-teman Teknik Elektro 2016 yang selalu memberikan dukungan dan
bantuan.
Akhir kata, semoga laporan tugas akhir ini dapat diterima dan dapat dijadikan bahan
pembelajaran untuk penelitian yang lebih baik di masa yang akan datang.
Jakarta, 25 Agustus 2020
Universitas Pertamina - vi
DAFTAR ISI
LEMBAR PENGESAHAN ... i LEMBAR PERNYATAAN ... ii ABSTRAK ... iii ABSTRACT ... iv KATA PENGANTAR ... v DAFTAR ISI ... viDAFTAR TABEL ... viii
DAFTAR GAMBAR ... ix BAB 1 PENDAHULUAN ... 1 1.1 Latar Belakang ... 1 1.2 Rumusan Masalah ... 2 1.3 Batasan Masalah ... 2 1.4 Tujuan Perancangan ... 3 1.5 Manfaat Perancangan ... 3
1.6 Waktu Pelaksanaan Perancangan ... 3
BAB 2 DASAR TEORI ... 5
2.1 Kajian Pustaka ... 5
2.2 Arduino Uno R3 ATMega328P ... 7
2.3 IDE Arduino ... 8
2.4 Sensor Ultrasonik HR-SC04 ... 8
2.5 Modul Driver Motor L298N ... 10
2.6 Sensor Kompas HMC5883L ... 10
2.7 Relay 5V ... 11
2.8 LCD (Liquid Crystal Display) ... 11
2.9 Motor DC ... 12
2.10 Fuzzy Logic Control ... 13
2.10.1 Fuzzification ... 17
2.10.2 Implication (Inference Core) ... 17
2.10.3 Accumulation ... 18
2.10.4 Defuzzification ... 18
2.11 Fuzzy Logic Mamdani ... 19
2.12 Standar Pemotongan Rumput ... 22
Universitas Pertamina - vii
3.1 Diagram Alir Perancangan ... 23
3.1.1 Studi Literatur ... 24
3.1.2 Penentuan Konsep Perancangan ... 24
3.1.3 Analisa Kebutuhan Perancangan... 24
3.1.4 Pembuatan Kode Program ... 24
3.1.5 Pembuatan Robot ... 27
3.1.6 Pengujian ... 27
3.1.7 Evaluasi ... 27
3.2 Pertimbangan Perancangan ... 28
3.3 Analisis Teknik ... 28
3.4 Peralatan dan Bahan ... 29
BAB 4 HASIL DAN PEMBAHASAN ... 33
4.1 Pembuatan Robot Pemotong Rumput Otomatis ... 33
4.2 Pengujian Sistem ... 34
4.2.1 Pengujian Liquid Crystal Display (LCD) ... 34
4.2.2 Pengujian Sensor Ultrasonik ... 35
4.2.3 Pengujian Motor Driver L298N ... 38
4.2.4 Pengujian Sensor Kompas ... 41
4.2.5 Pengujian Relay ... 43
4.3 Pengujian Robot Terhadap Halangan ... 44
4.4 Pengujian Pergerakan Robot Terhadap Arah Sudut ... 45
4.5 Pengujian Logika Fuzzy... 46
4.6 Pengujian Pemotongan Rumput ... 49
4.7 Analisis Sistem Secara Keseluruhan ... 51
BAB 5 KESIMPULAN DAN SARAN ... 54
5.1 Kesimpulan ... 54
5.2 Saran ... 54
LAMPIRAN ... 55
Universitas Pertamina - viii
DAFTAR TABEL
Tabel 2.1 Spesifikasi Arduino Uno R3 ... 7
Tabel 2.2 Spesifikasi Motor DC 12V ... 12
Tabel 2.3 Pemetaan Nilai Input Pembacaan Jarak pada Sensor Ultrasonik ... 20
Tabel 2.4 Pemetaan Nilai Output Kecepatan Motor DC pada Roda Ban ... 20
Tabel 2.5 Rules yang Digunakan pada Robot Pemotong Rumput Otomatis ... 21
Tabel 3.1 Peralatan yang digunakan pada pembuatan Robot Pemotong Rumput Otomatis ... 29
Tabel 3.2 Bahan yang digunakan pada pembuatan Robot Pemotong Rumput Otomatis.. 29
Tabel 4.1 Hasil Pengukuran Jarak Menggunakan Sensor Ultrasonik ... 36
Tabel 4.2 Hasil Pengujian Motor Driver ... 38
Tabel 4.3 Pengujian Pergerakan Motor Driver L298N Unit 1 ... 38
Tabel 4.4 Pengujian Pergerakan Motor Driver L298N Unit 2 ... 38
Tabel 4.5 Hasil Pengujian Sensor Kompas ... 41
Tabel 4.6 Pengujian Relay 5V ... 43
Tabel 4.7 Pengujian Robot Terhadap Halangan ... 44
Tabel 4.8 Pengujian Pergerakan Robot Terhadap Arah Sudut ... 45
Tabel 4.9 Pengujian Pemotongan Rumput Tanpa Menggunakan Logika Fuzzy ... 49
Tabel 4.10 Pengujian Pemotongan Rumput Dengan Menggunakan Logika Fuzzy ... 50
Universitas Pertamina - ix
DAFTAR GAMBAR
Gambar 2.1 Arduino Uno R3 ATMega328P ... 7
Gambar 2.2 IDE Arduino ... 8
Gambar 2.3 Sensor Ultrasonik HR-SC04 ... 9
Gambar 2.4 Arah Pancaran Gelombang Ultrasonik ... 9
Gambar 2.5 Module Driver Motor L298N ... 10
Gambar 2.6 Sensor Kompas HMC5883L ... 11
Gambar 2.7 Relay 12V ... 11
Gambar 2.8 LCD (Liquid Crystal Display) 16×2 ... 12
Gambar 2.9 Motor DC 12V ... 12
Gambar 2.10 Fungsi Segitiga ... 13
Gambar 2.11 Fungsi Trapesium ... 13
Gambar 2.12 Fuzzy Set Operation: Min-max Operation ... 14
Gambar 2.13 Fuzzy Set Operation: Not Operation ... 14
Gambar 2.14 Fuzzy Set Operation: Algebraic Sum ... 15
Gambar 2.15 Fuzzy Set Operation: Algebraic Product ... 15
Gambar 2.16 Fuzzy Set Operation: Bounded Sum ... 16
Gambar 2.17 Fuzzy Set Operation: Bounded Product ... 16
Gambar 2.18 Clipped Area ... 17
Gambar 2.19 Scaling Area ... 18
Gambar 2.20 Perhitungan Center of Gravity untuk setiap Membership Function ... 19
Gambar 2.21. Blok Diagram Fuzzy Logic Mamdani ... 19
Gambar 2.22 Pembacaan Jarak pada Sensor Ultrasonik ... 20
Gambar 2.23 Kecepatan Motor DC pada Roda Ban ... 21
Gambar 3.1 Diagram Alir Perancangan ... 23
Gambar 3.3 Tampilan Pembacaan Jarak pada Sensor Ultrasonik ... 25
Gambar 3.4 Desain Robot Pemotong Rumput Otomatis Tampak Atas ... 25
Gambar 3.5 Desain Robot Pemotong Rumput Otomatis Tampak Samping ... 26
Gambar 3.6 Diagram Alir Rute Pergerakkan Robot Pemotong Rumput Otomatis ... 26
Gambar 3.7 Desain Area Rute Pergerakkan Robor Pemotong Rumput Otomatis ... 27
Gambar 3.8 Jarak terhadap Halangan ... 28
Gambar 3.9 Rangkaian Perancangan Robot Pemotong Rumput Otomatis ... 31
Universitas Pertamina - x
Gambar 4.2 Robot Pemotong (a) Tampak samping; (b) Tampak Atas; (c) Tampak Depan;
(d) Tampak Belakang. ... 34
Gambar 4.3 Rangkaian Pengujian LCD I2C ... 34
Gambar 4.4 Hasil Pengujian LCD ... 35
Gambar 4.5 Rangkaian Pengujian Sensor Ultrasonik HC-SR04 ... 35
Gambar 4.6 Grafik Perbandingan Pengukuran Jarak antara Sensor Ultrasonik HC-SR04 dengan manual. ... 37
Gambar 4.7 Grafik Nilai Error pada Pengujian Sensor Ultrasonik HC-SR04 ... 37
Gambar 4.8 Rangkaian Pengujian Sensor Kompas GY-271 ... 41
Gambar 4.9 Grafik Perbandingan Sensor Kompas GY-271 dengan Kompas Digital Smartphone ... 42
Gambar 4.10 Rangkaian Pengujian Relay 5V ... 43
Gambar 4.11 Grafik Hubungan Input Jarak dengan Output Kecepatan Menggunakan MATLAB Fuzzy Toolbox ... 46
Gambar 4.12 Grafik Nilai Error Kecepatan pada Masing-masing Motor DC ... 48
Gambar 4.13 Hasil Pemotongan Rumput Tanpa Menggunakan Logika Fuzzy: (a) Sebelum pemotongan; (b) Sesudah Pemotongan ... 50
Gambar 4.14 Gambar 4.15 Hasil Pemotongan Rumput Menggunakan Logika Fuzzy: (a) Sebelum pemotongan; (b) Sesudah Pemotongan ... 51
Gambar 6.1 Pengukuran Jarak oleh Sensor Ultrasonik HC-SR04 ... 55
Gambar 6.2 Pengukuran Kecepatan Menggunakan Tachometer ... 55
Gambar 6.3 Area Pengujian Pemotongan Rumput Tanpa Menggunakan Logika Fuzzy . 56 Gambar 6.4 Hasil Pemotongan Rumput Tanpa Menggunakan Logika Fuzzy ... 56
Gambar 6.5 Area Pengujian Pemotongan Rumput Menggunakan Logika Fuzzy ... 57
Universitas Pertamina - 1
BAB 1
PENDAHULUAN
1.1
Latar Belakang
Rumput tumbuh secara liar di pekarangan sehingga membuat halaman menjadi tidak terawat. Rumput yang tumbuh di pekarangan harus dipotong secara teratur. Pemotongan rumput dapat dilakukan secara manual dengan menggunakan gunting pemotong rumput maupun menggunakan mesin pemotong rumput. Saat ini banyak orang yang telah memanfaatkan mesin pemotong rumput. Mesin pemotong rumput ini cukup banyak tersedia secara komersial. Namun, hal yang perlu dipertimbangkan dari mesin pemotong rumput adalah suara mesin pemotong rumput yang cukup menimbulkan kebisingan. Sedangkan, bagi pengguna yang mengoperasikan mesin pemotong rumput terdapat persoalan getaran mesin yang dalam jangka panjang akan mengganggu kesehatan fisiologisnya. Berdasarkan penelitian [1] yang dilakukan pada satu jenis mesin pemotong rumput dengan merk STHL dan lima pengguna yang mengoperasikan mesin pemotong rumput di Universitas Syiah Kuala. Hasil pengujian getaran pada mesin diperoleh bahwa getaran yang terjadi pada gagang mesin yang sudah melebihi batas maksimum diizinkan dengan tingkat akselerasi getaran yang tinggi pada kurun waktu yang lama akan menyebabkan beberapa penyakit. Sedangkan dari hasil pengujian kebisingan didapat bahwa tingkat kebisingan rata-rata yang diterima oleh operator yaitu sebesar 97,3 dBA yang berarti melebihi 85 dBA yang memiliki maksimal waktu kerja 8 jam sehari dan 40 jam seminggu.
Untuk mengatasi hal tersebut, alternatif lain yang dapat digunakan untuk menggantikan mesin pemotong rumput adalah robot pemotong rumput. Hal ini dikarenakan robot pemotong rumput cukup baik dalam hal efisiensi serta keamanan dalam penggunaan. Robot sangat membantu dan memudahkan manusia dalam berbagai aspek kehidupan. Robot biasanya digunakan untuk melakukan tugas yang berat dan berbahaya serta berulang-ulang. Robot berawal dari bahasa cheko yaitu “robota” yang berarti pekerja atau kuli yang tidak mengenal lelah atau bosan. Robot adalah sebuah alat mekanik yang dapat digunakan untuk melakukan tugas fisik, baik dengan pengawasan dan kontrol manusia, maupun dengan menggunakan kode program yang telah didefinisikan terlebih dahulu atau dengan kecerdasan buatan (Artificial Intellegent). Penggunaan robot telah banyak dilakukan pada bidang produksi, hiburan, kebersihan, dan lain sebagainya. Salah satu penggunaan robot dalam bidang kebersihan yaitu robot pemotong rumput. Penggunaan robot untuk memotong rumput dilakukan untuk memudahkan serta mengurangi resiko kecelakaan kerja. Perancangan robot pemotong rumput ini sudah banyak dilakukan sebelumnya, seperti pada penelitian [2], [3], dan [4]
Penelitian [2] menjelaskan tentang perancangan robot pemotong rumput menggunakan logika fuzzy metode mamdani untuk mengatur kecepatan motor DC pada roda agar bergerak dengan mulus. Robot ini bergerak zig-zag dengan sudut putar 180⁰ pada area yang telah ditentukan. Robot pemotong rumput memiliki sensor ultrasonik yang digunakan untuk mendeteksi pembatas sisi area. Sedangkan, sensor warna berfungsi sebagai on/off
Universitas Pertamina - 2
putaran motor dc yang digunakan pada robot mobil. Robot ini memiliki berat sebesar 3,7 kg dan menggunakan serat fiber untuk memotong rumput.
Selain itu, pada penelitian [3] membahas sebuah perancangan robot pemotong rumput menggunakan logika fuzzy metode sugeno untuk mengatur robot agar kembali berjalan dengan lurus apabila robot berjalan menyerong. Desain robot pemotong rumput dilengkapi dengan sensor ultrasonik, sensor kompas, dan sensor GPS. Sensor ultrasonik digunakan untuk mendeteksi area sisi pembatas, sensor kompas digunakan sebagai alat navigasi, dan sensor GPS digunakan sebagai alat tracking.
Adapun pada penelitian [4] membahas tentang cara menerapkan sistem GPS untuk menentukan arah pergerakan alat pemotong rumput otomatis. Selain itu penelitian ini menggunakan PID controller untuk meningkatkan kinerja kecepatan motor yang dapat memberikan pergerakan yang lebih baik. Pengendalian yang digunakan pada penelitian ini adalah kontroler PID high-level dan kontroler PID low-level. Dari hasil pengujian yang telah dilakukan didapatkan hasil bahwa sistem kontrol PID yang digunakan tidak berfungsi dengan benar dikarenakan penyetelan parameter gain pada kontrol PID tidak tepat. Kontroler PID digunakan meminimalkan nilai kesalahan setiap waktu dengan penyetelan variable control yang tepat.
Dari latar belakang tersebut, maka akan dirancang sebuah robot pemotong rumput otomatis yang dikontrol menggunakan logika fuzzy mamdani berbasis Arduino. Pada perancangan ini, robot pemotong rumput menggunakan logika fuzzy sebagai controller yang digunakan untuk mengontrol kecepatan putaran motor DC roda ban. Pemilihan kontroler fuzzy ini dikarenakan proses kendali ini relatif mudah dan fleksibel. Perancangan fuzzy dilakukan dengan tidak melibatkan model matematis yang rumit dari sistem yang akan dikendalikan. Tetapi dengan menerapkan suatu sistem kemampuan manusia untuk mengendalikan sesuatu, yaitu dalam bentuk aturan jika-maka (If-Then Rules). Sistem kendali logika fuzzy ini merupakan sistem kendali yang tidak memiliki ketergantungan pada variabel-variabel proses kendali. [5]
1.2
Rumusan Masalah
Adapun rumusan masalah dalam perancangan ini adalah:
1. Merancang dan mengimplementasikan robot yang dapat memotong rumput secara otomatis
2. Mengimplementasikan metode logika fuzzy untuk mengontrol kecepatan motor DC pada robot pemotong rumput otomatis
1.3
Batasan Masalah
Adapun batasan masalah yang terdapat pada perancangan robot pemotong rumput ini adalah:
1. Perancangan robot pemotong rumput ini berupa prototype. 2. Robot pemotong rumput digunakan pada bidang tanah yang datar.
3. Luas area yang dapat di cakup sebesar 4 m2 dan memiliki pembatas disekitarnya.
4. Jarak pembacaan sensor ultrasonik untuk mendeteksi halangan sebesar 30 cm. 5. Jenis rumput yang dipotong adalah rumput jepang.
Universitas Pertamina - 3
6. Rumput akan dipotong apabila memiliki ketinggian lebih besar atau sama dengan 1,5 cm.
1.4
Tujuan Perancangan
Tujuan dari perancangan ini adalah:
1. Merancang dan mengimplementasikan robot pemotong rumput secara otomatis. 2. Mengaplikasikan metode logika fuzzy untuk mengendalikan kecepatan motor DC
pada robot pemotong rumput otomatis
1.5
Manfaat Perancangan
Adapun manfaat dari perancangan ini adalah:
1. Dapat digunakan untuk proses pemotongan rumput secara otomatis sehingga dapat mempermudah pekerjaan manusia.
2. Dapat merancang dan mengimplementasikan robot pemotong rumput otomatis. 3. Dapat mengetahui bahwa sistem kendali logika fuzzy dapat digunakan untuk
kontrol kecepatan motor DC pada robot pemotong rumput.
1.6
Waktu Pelaksanaan Perancangan
Waktu pelaksanaan perancangan alat ini akan dilakukan dimulai pada tanggal 13 Januari 2020 s/d 6 Juli 2020. Adapun rincian waktu pelaksanaan perancangan ditunjukkan pada Tabel 1. berikut
Tabel 1. Rincian Waktu Pelaksanaan Perancangan
No . Kegiatan Minggu ke- 1 2 3 4 5 6 7 8 9 10 1. Penyusunan Proposal 2. Pembelian Komponen 3. Pembuatan Kode Program 4. Perakitan Alat 5. Penyusunan Laporan TA Bab 1-3 6. Persiapan Kemajuan TA
Universitas Pertamina - 4
No . Kegiatan Minggu ke- 11 12 13 14 15 16 17 18 19 20 7. Seminar Kemajuan TA 8. Pengujian Alat9. Evaluasi Kinerja Alat
10. Perbaikan Alat 11. Pengambilan Data 12. Penyusunan Laporan TA Bab 4-5 No . Kegiatan Minggu ke- 21 22 23 24 25 26 27 28 29 30 12. Penyusunan Laporan TA Bab 4-5 13. Pendaftaran Sidang TA 14. Persiapan Sidang TA 15. Sidang TA
Universitas Pertamina - 5
BAB 2
TINJAUAN PUSTAKA
2.1
Kajian Pustaka
Dalam penulisan tugas akhir ini maka diperlukan sebuah hasil penelitian yang sudah dilakukan sebelumnya yang masih berkaitan dengan penelitian yang sedang dilakukan saat ini sebagai bahan referensi atau bahan perbandingan, baik mengenai kekurangan dan kelebihan yang sudah ada. Referensi dan informasi yang berkaitan dengan penelitian ini juga diperoleh dari berbagai sumber antara lain buku-buku, jurnal, maupun skripsi dalam rangka mendapatkan suatu informasi mengenai teori yang berkaitan dengan judul yang digunakan untuk memperoleh landasan teori ilmiah.
Pada tahun 2017 telah dilakukan sebuah penelitian oleh Firadus et.al yaitu perancangan robot pemotong rumput otomatis dengan menggunakan logika Fuzzy metode mamdani untuk mengatur kecepatan motor ketika menerima input dari sensor ultrasonik, sehingga gerakan robot pada saat berubah arah menjadi lebih mulus. Kelebihan dari perancangan ini adalah robot yang dirancang dapat memotong rumput secara otomatis dengan rute pergerakan berbentuk zig-zag, robot ini juga dilengkapi dengan sensor ultrasonik dan sensor warna. Sensor ultrasonik digunakan untuk mendeteksi pembatas sisi area dan sensor warna berfungsi sebagai on/off putaran motor dc yang digunakan pada robot mobil. Sedangkan, kekurangan dari perancangan ini adalah robot ini cukup berat yaitu 3,7 kg dan dimensi ukuran yang cukup besar yaitu 70 × 29,7 × 15 cm. robot pemotong rumput ini tidak bisa berjalan terlalu cepat. Hasil pengujian pengaturan kecepatan dengan menggunakan logika fuzzy metode mamdani menunjukkan nilai keluaran baru dari kecepatan ketika menerima input dari jarak yang dideteksi oleh sensor ultrasonik. Kecepatan maksimal yang dihasilkan yaitu 82.5cm/s dan kecepatan minimal yaitu 25cm/s. [2]
Penelitian lain yang juga dilakukan oleh Kamarudin et.al yaitu perancangan robot pemotong rumput menggunakan logika fuzzy metode sugeno untuk mengatur robot agar kembali berjalan dengan lurus apabila robot berjalan menyerong dan melakukan tracking secara otomatis dari titik asal ke titik tujuan sehingga robot dapat mengetahui arah pergerakannya. Kelebihan dari perancangan ini adalah robot yang dirancang dapat memotong rumput secara otomatis dengan dilengkapi sensor kompas dan neo M8N sehingga navigasi robot lebih sempurna. Sensor kompas pada robot ini digunakan sebagai alat navigasi untuk menentukan arah pergerakan robot dan Neo M8N pada robot ini digunakan sebagai alat tracking untuk melacak atau mendeteksi lokasi robot. Sedangkan, kekurangan dari perancangan ini adalah robot yang dirancang tidak dapat mendeteksi adanya halangan didepannya, robot ini menggunakan senar pemotong untuk memotong rumput, dan baterai yang digunakan pada motor DC pemotong memiliki daya tahan baterai yang kurang maksimal. Pada penelitian ini dilakukan pengujian fungsi sensor kompas untuk mengecek pergerakan robot hingga 360°. Dari hasil pengujian sensor kompas didapatkan hasil error sudut dengan rata-rata 3,48 dan standar deviasi 3,21131593 sehingga dapat dikatakan bahwa sensor kompas yang digunakan kurang akurat. Pada penelitian ini
Universitas Pertamina - 6
juga dilakukan pengujian terhadap Neo M8N untuk mengetahui error koordinat atau pergerakan koordinat robot menggunakan U-center v 8.20 sebanyak dua kali pengujian dalam rentang waktu satu jam. Dari hasil pengujian Neo M8N didapat hasil Error sudut dengan rata-rata -0,5 dan standar deviasi 4,949747. [3]
Pada tahun 2005 penelitian mengenai robot pemotong rumput juga dilakukan oleh Smith J. et.al. penelitian ini membahas tentang cara menerapkan sistem GPS untuk menentukan arah pergerakan alat pemotong rumput otomatis. Selain itu penelitian ini menggunakan PID controller untuk meningkatkan kinerja kecepatan motor yang dapat memberikan pergerakan yang lebih baik. Penelitian ini juga menggunakan encoder untuk menghitung jarak. Encode didapat dari sensor magnetik dan sensor halangan yang ditempatkan di sekitar roda. Kinerja mesin pemotong rumput akan dikontrol menggunakan transmisi nirkabel. Pengendalian yang digunakan pada penelitian ini adalah kontroler PID high-level dan kontroler PID low-level. Pengendali PID low-level bertanggung jawab atas gerak maju dan mundur dari alat pemotong rumput. Kontroler PID high-level bertanggung jawab untuk mengarahkan mesin pemotong dan memastikan bahwa robot berjalan lurus. Dari hasil pengujian yang telah dilakukan didapatkan hasil bahwa sistem kontrol PID yang digunakan tidak berfungsi dengan benar dikarenakan penyetelan parameter gain pada kontrol PID tidak tepat dan dalam penelitian ini belum menghilangkan kesalahan dalam pengkodean. Sedangkan, kontroler PID secara kontinyu menghitung nilai kesalahan sebagai selisih antara setpoint yang diinginkan dan variabel proses yang terukur. Kontroler PID akan meminimalkan nilai kesalahan setiap waktu dengan penyetelan variabel control yang tepat. [4]
Dari kajian pustaka diatas, perancangan ini dimaksudkan untuk membuat robot pemotong rumput berdasarkan dari kekurangan atau kelebihan dari perancangan yang telah dilakukan sebelumnya pada kajian pustaka tersebut. Perancangan ini akan menggunakan Arduino Uno R3 ATMega328P sebagai pengendali yang akan digunakan. Robot akan bergerak secara zig-zag dengan dilengkapi dengan sensor kompas untuk mendeteksi sudut robot yang akan digunakan untuk menentukan respon pergerakan belok pada robot agar lebih sempurna. Pergerakan robot tidak menyerong saat berbelok sehingga robot dapat bergerak zig-zag secara sempurna. Robot juga dilengkapi oleh sensor ultrasonik untuk mendeteksi jarak terhadap halangan dan LCD untuk menampilkan data pembacaan jarak oleh sensor ultrasonik dan waktu pemotongan. Robot pemotong rumput ini akan di rancang dengan bobot yang lebih ringan sehingga mudah untuk digunakan. Robot ini juga akan menggunakan pisau pemotong yang ringan namun tajam untuk memotong rumput sehingga kualitas pemotongan menjadi lebih baik. Ketinggian pemotongan rumput ditentukan pada ketinggian 2 cm dari permukaan tanah. Pada perancangan ini, robot pemotong rumput menggunakan logika fuzzy sebagai controller yang digunakan untuk mengontrol kecepatan putaran motor DC roda ban. Kecepatan putaran roda ban robot akan diatur pada kecepatan 80-140 cm/s.
Universitas Pertamina - 7
2.2
Arduino Uno R3 ATMega328P
Gambar 2.1 Arduino Uno R3 ATMega328P [6]
Papan Arduino mengandung mikrokontroller ATMega328 dan sejumlah input/output (I/O) yang memudahkan pemakai untuk menciptakan berbagai proyek elektronika yang dikhususkan untuk menangani tujuan tertentu. Arduino memiliki port USB yang digunakan untuk menghubungkan Arduino dengan komputer melalui sepasang kabel USB. Arduino juga memiliki 14 pin digital dan 6 pin analog. Arduino dilengkapi dengan Static Random Access Memory (SRAM) berukuran 2 kb untuk memegang data, flash memory berukuran 32kb, dan Erasable Programmable Read-Only Memory (EEPROM). SRAM digunakan untuk menampung data atau hasil pemrosesan data selama Arduino menerima pasokan catu daya. Flash memory untuk menaruh program yang dibuat. EEPROM digunakan untuk meletakan program bawaan dari Arduino uno dan sebagian lagi dapat dimanfaatkan untuk meletakkan data secara permanen. Spesifikasi Arduino Uno R3 dapat dilihat pada Tabel 1. berikut ini
Tabel 2.1 Spesifikasi Arduino Uno R3 [7]
Mikrokontroller ATMega328P
Operasi Tegangan 5 volt
Input Tegangan 7 – 12 volt
Pin I/O Digital 14 pin
Pin Analog 6 pin
Arus DC tiap Pin I/O 50 mA
Memori Flash 32 kb
SRAM 2 kb
EEPROM 1 kb
Universitas Pertamina - 8
2.3
IDE Arduino
Gambar 2.2 IDE Arduino
IDE (Integrated Development Environment) adalah sebuah perangkat lunak yang digunakan untuk mengembangkan aplikasi mikrokontroller mulai dari menuliskan source program, kompilasi, upload hasil kompilasi dan uji coba secara terminal serial.
Icon menu verify berfungsi untuk mengecek program yang ditulis apakah ada yang salah atau error
Icon menu upload berfungsi untuk memuat atau mentransfer program yang dibuat di software arduino ke hardware arduino
2.4
Sensor Ultrasonik HR-SC04
Sensor ultrasonik HC-SR04 adalah salah satu sensor yang dapat digunakan untuk mengukur jarak terhadap suatu objek dengan menggunakan gelombang ultrasonik. Gelombang ultrasonik yang digunakan berfrekuensi 40 kHz. Sensor ini mampu mengukur objek pada jarak 2 cm hingga 4 meter, dengan tingkat presisi sebesar 0,3 cm. Sudut deteksi yang bisa ditangani tidak lebih dari 15 derajat. Arus yang diperlukan tidak lebih dari 2 mA dan tegangan yang dibutuhkan sebesar +5V. [8]
Universitas Pertamina - 9
Gambar 2.3 Sensor Ultrasonik HR-SC04 [9]
Sensor ini mempunyai empat pin. Cara menghubungkan keempat pin dengan arduino adalah seperti berikut:
VCC dihubungkan ke pin 5V arduino
GND dihubungkan ke pin GND arduino
Trig dihubungkan ke salah satu pin digital arduino. Pin inilah yang mengirimkan sinyal dalam bentuk gelombang suara berfrekuensi 40 kHz
Echo dihubungkan ke salah satu pin digital arduino. Pin inilah yang bertanggung jawab untuk menerima gelombang yang dipantulkan oleh objek yang berada di depan sensor.
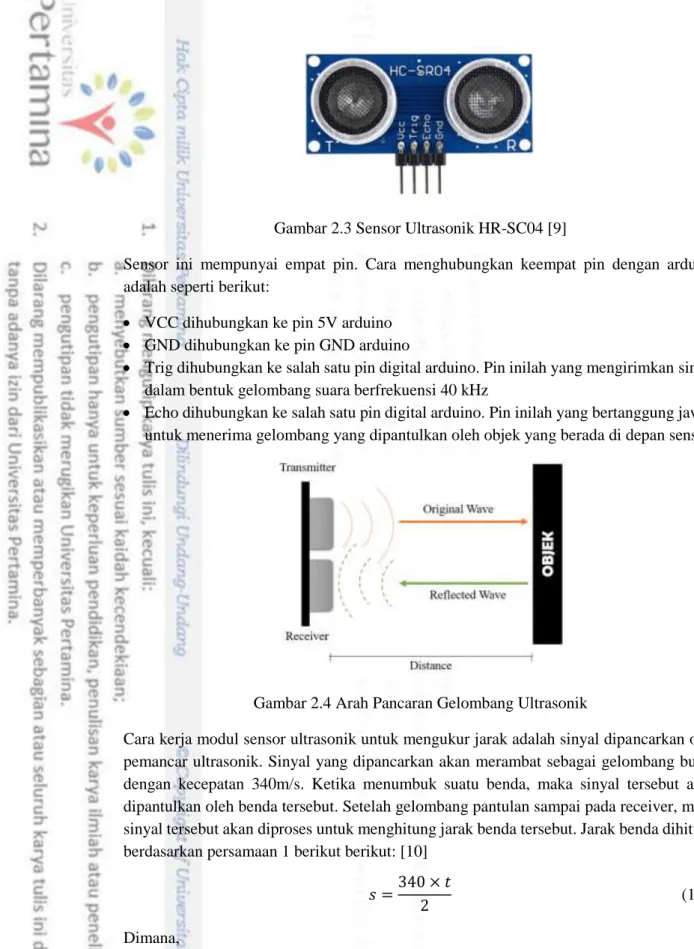
Gambar 2.4 Arah Pancaran Gelombang Ultrasonik
Cara kerja modul sensor ultrasonik untuk mengukur jarak adalah sinyal dipancarkan oleh pemancar ultrasonik. Sinyal yang dipancarkan akan merambat sebagai gelombang bunyi dengan kecepatan 340m/s. Ketika menumbuk suatu benda, maka sinyal tersebut akan dipantulkan oleh benda tersebut. Setelah gelombang pantulan sampai pada receiver, maka sinyal tersebut akan diproses untuk menghitung jarak benda tersebut. Jarak benda dihitung berdasarkan persamaan 1 berikut berikut: [10]
𝑠 =340 × 𝑡
2 (1)
Dimana,
𝑠 = Jarak antara sensor ultrasonik dengan benda
𝑡 = Selisih antara waktu pemancar gelombang oleh transmitter dan waktu ketika gelombang pantul diterima receiver.
Universitas Pertamina - 10
2.5
Modul Driver Motor L298N
Modul driver motor L298N ini adalah sebuah H-Bridge Dual Motor Controller 2A yang memungkinkan untuk mengatur arah putaran maupun kecepatan dari satu atau dua motor DC. Selain itu, dengan modul driver motor ini juga dapat mengontrol sebuah motor stepper bipolar dengan mudah. Modul driver motor ini dapat digunakan untuk motor dengan rentang tegangan DC antara 5V – 35V. Pada modul ini terdapat regulator 5V. Berikut ini spesifikasi dari modul driver motor L298N:
Double H-Bridge drive chip L298N
Logical voltage 5V
Logical current antara 0 – 36mA
Drive voltage antara 5V – 35 V
Drive current sebesar 2A untuk setiap motor DC
Berat 30 gram
Ukuran modul driver motor L293D sebesar 43×43×27 mm
Bentuk fisik dari modul driver motor L298N ditunjukkan pada Gambarr 2.5 berikut ini:
Gambar 2.5 Module Driver Motor L298N [11]
2.6
Sensor Kompas HMC5883L
Sensor HMC5883L ini adalah sensor yang sangat sensitive terhadap rotasi dan arah hadap sensor, dikarenakan sensor ini menggunakan medan magnet sebagai acuan dari pendeteksiannya. Sensor kompas ini memiliki sensor magnet dengan jenis magnetoresistif tiga sumbu dan memiliki akurasi kompas hinga 1⁰ sampai 2⁰. Sensor ini juga memiliki jangkauan pembacaan medan magnet sampai dengan ±8 gauss dengan resolusi 5 miligauss. Sensor ini menggunakan interface I2C.
Universitas Pertamina - 11
Gambar 2.6 Sensor Kompas HMC5883L [12]
2.7
Relay 5V
Relay merupakan salah satu komponen elektronik yang terdiri dari lempengan logam sebagai saklar dan kumparan yang berfungsi untuk menghasilkan medan magnet. Relay 5V ini berfungsi sebagai saklar yang menghubungkan motor DC pemotong rumput. Pada rangkaian ini digunakan relay 5 volt.
Gambar 2.7 Relay 12V [13]
2.8
LCD (
Liquid Crystal Display
)
Liquid Crystal Display (LCD) adalah komponen yang digunakan untuk menampilkan informasi dalam bentuk layar sederhana. LCD yang didukung oleh ArduBlock. ArduBlock adalah LCD teks yang hanya digunakan untuk menampilkan teks. Dalam hal ini, LCD untuk jenis paralel berukuran 16 × 2 karakter dan untuk jenis I2C berupa 20 × 4 karakter angka 2 atau 4 menyatakan jumlah baris . Pada perancangan ini, digunakan LCD 16×2. Adapun fitur-fitur yang tersedia pada LCD ini adalah:
Terdiri dari 16 kolom dan 2 baris
Dilengkapi dengan backlight
Mempunyai 192 karakter tersimpan
Dapat dialamati dengan mode 4-bit dan 8-bit
Universitas Pertamina - 12
Gambar 2.8 LCD (Liquid Crystal Display) 16×2 [14]
2.9
Motor DC
Pada perancangan robot pemotong rumput ini digunakan Motor DC 12 V dengan spesifikasi sebagai berikut
Tabel 2.2 Spesifikasi Motor DC 12V [15]
Speed & Torque High
Tegangan kerja 12-24V
Limit Tegangan 6V-48V (not recommended)
Speed 2000-4000 rpm
Diamter motor 35.5 cm
Diameter motor & plat cover 37.5 cm
Panjang motor 57 mm
Panjang shaft/as 18.5 mm
Diameter shaft/as 3.17 mm
Berikut Motor DC yang akan digunakan pada perancangan robot pemotong rumput otomatis.
Universitas Pertamina - 13
2.10
Fuzzy Logic Control
Pada fuzzy control terdapat beberapa terminology yang harus di definiskan terlebih dahulu antara lain sebagai berikut:
a. Fuzzy Memberhip Function
Terdapat beberapa tipe membership function yaitu fungsi segitiga, fungsi trapesium, fungsi Sigmoid, dan fungsi Gaussian. Tetapi, membership function yang sering digunakan adalah fungsi segitiga dan fungsi trapesium.
Fungsi Segitiga
Gambar 2.10 Fungsi Segitiga [15]
Fungsi Keanggotaan pada membership function segitiga direpresentasikan pada persamaan 2 berikut ini:
𝜇(𝑥) = { 0 ; 𝑥 ≤ 𝑎 𝑎𝑡𝑎𝑢 𝑥 ≥ 𝑐 (𝑥 − 𝑎) (𝑏 − 𝑎); 𝑎 ≤ 𝑥 ≤ 𝑏 (𝑐 − 𝑥) (𝑐 − 𝑏); 𝑏 ≤ 𝑥 ≤ 𝑐 (2)
Dimana x adalah variabel yang akan dicari, a adalah batas bawah, b adalah batas tengah, dan c adalah batas atas.
Fungsi Trapesium
Gambar 2.11 Fungsi Trapesium [15]
Fungsi Keanggotaan pada membership function trapesium direpresentasikan pada persamaan 3 berikut ini:
Universitas Pertamina - 14
𝜇(𝑥) = { 0 ; 𝑥 ≤ 𝑎 𝑎𝑡𝑎𝑢 𝑥 ≥ 𝑑 (𝑥 − 𝑎) (𝑏 − 𝑎); 𝑎 < 𝑥 < 𝑏 ; 𝑏 ≤ 𝑥 ≤ 𝑐 (𝑑 − 𝑥) (𝑑 − 𝑐); 𝑐 < 𝑥 ≤ 𝑑 (3)Dimana x adalah variabel yang akan dicari, a adalah batas bawah, b dan c adalah batas tengah, dan d adalah batas atas.
b. Fuzzy Logic Operator
Min-Max Operation
Gambar 2.12 Fuzzy Set Operation: Min-max Operation [16]
Persamaan Min-Max operation untuk operator OR(𝐴 ∪ 𝐵) ditunjukkan pada persamaan 4 dan Operator AND (𝐴 ∩ 𝐵) ditunjukkan pada persamaan 5 sebagai berikut:
max (𝜇𝐴(𝑥), 𝜇𝐵(𝑥)) (4)
min (𝜇𝐴(𝑥), 𝜇𝐵(𝑥)) (5)
NOT Operation
Universitas Pertamina - 15
Persamaan NOT Operation ditunjukkan pada persamaan 6 berikut ini:
𝜇𝑛𝑜𝑡 𝐴(𝑥) = 1 − 𝜇𝐴(𝑥) (6)
Algebraic Sum
Gambar 2.14 Fuzzy Set Operation: Algebraic Sum [16]
Persamaan Algebric Sum ditunjukkan pada persamaan 7 berikut ini:
𝑆𝑢 𝑚(𝜇𝐴(𝑥), 𝜇𝐵(𝑦)) = 𝜇𝐴(𝑥)+̇𝜇𝐵(𝑦)
= 𝜇𝐴(𝑥) + 𝜇𝐵(𝑦) − 𝜇𝐴(𝑥), 𝜇𝐵(𝑦)
atau (7)
𝑆𝑢 𝑚(𝜇𝐴(𝑥), 𝜇𝐵(𝑦)) = 𝜇𝐴(𝑥)+̇𝜇𝐵(𝑦) = 1 − (1 − 𝜇𝐴(𝑥))(1 − 𝜇𝐵(𝑦))
Algebraic Product
Gambar 2.15 Fuzzy Set Operation: Algebraic Product [16]
Persamaan Algebric Product ditunjukkan pada persamaan 8 berikut ini:
Universitas Pertamina - 16
Bounded SumGambar 2.16 Fuzzy Set Operation: Bounded Sum [16]
Persamaan Bounded Sum ditunjukkan pada persamaan 9 berikut ini:
𝐵𝑜𝑢𝑛𝑑𝑒𝑑𝑆𝑢𝑚(𝜇𝐴(𝑥), 𝜇𝐵(𝑦)) = 𝜇𝐴(𝑥) ⊕ 𝜇𝐵(𝑦)
= min (1, 𝜇𝐴(𝑥) + 𝜇𝐵(𝑦))
(9)
Bounded Product
Gambar 2.17 Fuzzy Set Operation: Bounded Product [16]
Persamaan Bounded Product ditunjukkan pada persamaan 10 berikut ini:
𝐵𝑜𝑢𝑛𝑑𝑒𝑑𝑃𝑟𝑜𝑑(𝜇𝐴(𝑥), 𝜇𝐵(𝑦)) = 𝜇𝐴(𝑥) ⊙ 𝜇𝐵(𝑦)
= max (0, 𝜇𝐴(𝑥) + 𝜇𝐵(𝑦) − 1)
(10)
c. Fuzzy Rules
Fuzzy rules merupakan pernyataan kondisional yang berhubungan dengan set fuzzy. Fuzzy rules terditi dari dua atribut yaitu:
Universitas Pertamina - 17
Suatu nilai (value) yang menunjukkan ukuran dari suatu variabel, seperti tall, high, fast, dan lain sebagainya.
Fuzzy Linguistic Variable
Variabel yang mempunyai nilai kata atau kalimat atau variabel yang mewakili suatu keadaan atau kondisi tertentu, seperti orang, tekanan, kecepatan, dan lain sebagainya.
Sedangkan, untuk langkah-langkah proses pada control fuzzy terdiri dari Fuzzification, Implication atau Inference Core, Accumulation, dan Defuzzification
2.10.1
Fuzzification
Pada tahap ini, hal yang harus dilakukan diantaranya adalah:
Menentukan Input fuzzy yaitu menentukan derajat keanggotaan untuk semua ketentuan di premise.
Menerapkan operator logika fuzzy yang akan digunakan sesuai dengan ketentuan rules.
2.10.2
Implication (Inference Core)
Pada tahap Inference core ini terdiri dari dua pendekatan diantaranya adalah:
a) Clipping appoarch
Gambar 2.18 Clipped Area [17]
Pendekatan clipping ini menggunakan Min-Operation logika fuzzy. Adapun,
implikasi fuzzy control pada pendekatan ini dapat dilihat pada persamaan 11 sebagai berikut:
𝐼𝑚𝑝𝑙(𝜇𝐴, 𝜇𝐵(𝑦)) = min(𝜇𝐴, 𝜇𝐵(𝑦)) (11)
Dimana,
𝜇𝐴=Fuzzification value
Universitas Pertamina - 18
b) Scaling appoarchGambar 2.19 Scaling Area [17]
Pendekatan scaling ini menggunakan Algebraic Product Operation logika fuzzy. Adapun, implikasi fuzzy control pada pendekatan ini dapat dilihat pada persamaan 12 sebagai berikut:
𝐼𝑚𝑝𝑙(𝜇𝐴, 𝜇𝐵(𝑦)) = 𝜇𝐴∙ 𝜇𝐵(𝑦) (12)
2.10.3
Accumulation
Pada tahap akumulasi (agregasi), semua area terpotong (clipped area) digabungkan menjadi satu area gabungan (Union Operation). Union Operation terdiri dari nilai maksimal area yang terpotong (max) dan penjumlahan area terpotong (sum). Rules yang memiliki premises tertinggi akan memberikan kontribusi clipped area yang besar pada area gabungan. Rules ini akan menarik area gabungan tersebut ke dalam nilai sentral miliknya.
2.10.4
Defuzzification
Pada tahap ini, nilai yang dikembalikan adalah akselerasi nilai yang diinginkan. Dari banyak cara yang memungkinakan, center of gravity merupakan metode yang biasa digunakan dalam defuzzifikasi.
Universitas Pertamina - 19
Gambar 2.20 Perhitungan Center of Gravity untuk setiap Membership Function [17]
2.11
Fuzzy Logic Mamdani
Fuzzy Inference System terbagi menjadi dua metode, yaitu Metode Sugeno dan Metode Fuzzy Mamdani. Perbedaan dari kedua metode ini terletak pada output yang dihasilkan, proses komposisi aturan dan defuzzifikasinya. Pada Metode Sugeno, output yang dihasilkan berupa fungsi linear atau konstanta. Output ini berbeda dengan yang dihasilkan oleh Metode Fuzzy Mamdani, dimana metode ini menghasilkan output berupa suatu nilai pada domain himpunan fuzzy yang dikategorikan ke dalam komponen linguistik.
Metode Fuzzy Mamdani dalam prosesnya menggunakan kaedah-kaedah linguistik dan memiliki algoritma fuzzy yang dapat dianalisis secara matematika, sehingga lebih mudah dipahami. Kelebihan pada Metode Fuzzy Mamdani adalah lebih spesifik, artinya dalam prosesnya Metode Fuzzy Mamdani lebih memperhatikan kondisi yang akan terjadi untuk setiap daerah fuzzynya, sehingga menghasilkan hasil keputusan yang lebih akurat. Selain itu juga, metode ini lebih cocok apabila input diterima dari manusia, sehingga lebih diterima oleh banyak pihak. Adapun kelemahan dari Metode Fuzzy Mamdani adalah metode ini hanya dapat digunakan untuk data dalam bentuk kuantitatif saja, tidak dapat dipergunakan untuk data yang berbentuk kualitatif.
Proses pengambilan keputusan dengan menggunakan Metode Fuzzy Mamdani untuk memperoleh keputusan yang terbaik, dilakukan dengan melalui beberapa tahapan, yaitu:
Gambar 2.21. Blok Diagram Fuzzy Logic Mamdani
Fuzzification Inference Defuzzification
Rules Crips Input Fuzzy Input Set Fuzzy Output Set Crips Output
Universitas Pertamina - 20
1) Fuzzification
Masukan pada perancangan robot pemotong rumput otomatis berupa pembacaan jarak dari sensor ultrasonik yang didefinisikan sebagai berikut :
Tabel 2.3 Pemetaan Nilai Input Pembacaan Jarak pada Sensor Ultrasonik
Jarak Nilai Jarak
Very small 0 cm ˂ x ≤ 50 cm
Small 20 cm ˂ x ≤ 95 cm
Safe 60 cm ˂ x ≤ 140 cm
Big 105 cm ˂ x ≤ 180 cm
Very big x ≥ 150 cm
Pada setiap himpunan fuzzy tersebut ditentukan domain dan fungsi keanggotaan yang akan digunakan untuk menentukan nilai keanggotaan setiap himpunan fuzzy, dimana nilai derajat keanggotaan tersebut terletak pada interval [0,1]. Pada Metode Fuzzy Mamdani ini fungsi keanggotaan yang digunakan adalah fungsi keanggotaan segitiga dan trapesium
Gambar 2.22 Pembacaan Jarak pada Sensor Ultrasonik
Setelah didapatkan nilai derajat kebenaran dari antecedent, kemudian dilakukan implikasi untuk mendapatkan nilai keluaran (consequent). Untuk mendapatkan nilai keluaran, terlebih dahulu ditentukan fungsi himpunan keanggotaan dari setiap fungsi keanggotaan keluaran sebagai berikut:
Tabel 2.4 Pemetaan Nilai Output Kecepatan Motor DC pada Roda Ban
Kecepatan Nilai Kecepatan (cm/s)
Very slow 80 ˂ x ≤ 100
Slow 90 ˂ x ≤ 110
Average 100 ˂ x ≤ 120
Fast 110 ˂ x ≤ 130
Very Fast 120 ˂ x ≤ 140
Very small Small Safe Big Very big
0 1
60
Universitas Pertamina - 21
Gambar 2.23 Kecepatan Motor DC pada Roda Ban
2) Implication (Rules)
Tahap kedua dari prosedur Metode Fuzzy Mamdani adalah penerapan fungsi implikasi. Fungsi implikasi merupakan struktur logika yang terdiri atas kumpulan premis dan satu konklusi. Fungsi implikasi berguna untuk mengetahui hubungan antara premis-premis dan konklusinya. Bentuk dari fungsi implikasi ini adalah dengan pernyataan IF x is A THEN y is B , dengan x dan y adalah skalar, serta A dan B adalah himpunan fuzzy. Dalam istilah logika fuzzy, proposisi yang mengikuti IF disebut dengan antisenden, sedangkan proposisi yang mengikuti THEN disebut dengan konsekuen. Aturan yang digunakan untuk menghubungkan membership input dan output adalah sebagai berikut.
1. Jika jarak adalah “very small” maka kecepatan akan “very slow” 2. Jika jarak adalah “small” maka kecepatan akan “slow”
3. Jika jarak adalah “safe” maka kecepatan akan “average” 4. Jika jarak adalah “big” maka kecepatan akan “fast”
5. Jika jarak adalah “very big” maka kecepatan akan “very fast”
Basis aturan yang digunakan dalam sistem ini direpresentasikan kedalam Tabel berikut.
Tabel 2.5 Rules yang Digunakan pada Robot Pemotong Rumput Otomatis
Jarak Kecepatan Motor
Very small Very slow
Small Slow
Safe Average
Big Fast
Very big Very fast
3) Inference Core
Pada tahap ketiga ini, suatu prosedur dengan tujuan untuk menentukan inferensi dari kumpulan dan korelasi antar aturan menggunakan Metode Max, dengan makna lain yaitu prosedur menggabungkan fungsi keanggotaan dari aturan aplikasi fungsi implikasi. Solusi himpunan fuzzy diperoleh dengan cara mengambil nilai maksimum
Very slow Slow Average Fast Very fast
0 1
110 140
Universitas Pertamina - 22
aturan, kemudian menggunakannya untuk memodifikasi daerah fuzzy dan mengaplikasikannya ke dalam output (keputusan akhir) dengan menggunakan operator OR (union).
4) Defuzzification
Proses defuzzifikasi ini perlu dilakukan, karena keputusan fuzzy atau output adalah tetap variabel linguistik dan variabel linguistik ini membutuhkan untuk dikonversi ke dalam variabel crisp. Metode yang dipergunakan dalam proses defuzzifikasi ini adalah defuzzifikasi dengan Metode Centroid (titik pusat). Metode ini memperhatikan kondisi setiap daerah fuzzynya, sehingga menghasilkan hasil yang lebih akurat. Metode centroid yaitu suatu metode dimana semua daerah fuzzy dari hasil komposisi aturan digabungkan dengan tujuan untuk membentuk hasil yang optimal dan mengambil titik pusat daerah fuzzy.
Proses dalam menentukan titik pusat daerah fuzzy dilakukan dengan menggunakan rumus sebagai berikut:
𝑍 =∫ 𝜇(𝑧)𝑧𝑑𝑧𝜇
∫ 𝜇(𝑧)𝑑𝑧𝜇
(..)
Keterangan :
Z = Domain himpunan fuzzy / hasil defuzzifikasi.
𝜇 = Nilai derajat keanggotaan
2.12
Standar Pemotongan Rumput
Pemotongan rumput adalah pemangkasan rumput secara periodik terhadap bagian tajuk rumput dengan tujuan mendapatkan hamparan rumput yang seragam. Tinggi pemotongan rumput memiliki nilai standar yang berbeda-beda berdasarkan tempat dan fungsinya.
• Pemotongan yang terlalu rendah menyebabkan rumput stress akibat penguapan dan kehilangan cadangan karbohidrat yang tinggi.
• Pemotongan yang terlalu tinggi akan menyebabkan rumput mudah layu atau tidak tegar sehingga nilai kualitas lapangan menjadi berkurang
Kualitas pemotongan rumput dipengaruhi oleh alat yang digunakan. Adapun faktor peralatan yang mempengaruhi kualitas pemotongan adalah kecepatan pergerakan mesin, ketajaman pisau, dan pemasangan pisau pemotong. Sebuah pemotong rumput juga harus mempunyai kecepatan minimal 1400 rpm agar rumput dapat terpotong secara sempurna.
Universitas Pertamina - 23
BAB 3
KONSEP PERANCANGAN
3.1
Diagram Alir Perancangan
Dalam perancangan sebuah alat sangat diperlukan suatu gambaran yang digunakan untuk dasar-dasar dalam langkah pekerjaan. Gambaran ini dapat disajikan dalam bentuk diagram alir sebagai metode dalam perancangan. Diagram alir perancangan ini bertujuan untuk mempermudah dalam pelaksanaan proses perancangan. Proses perancangan robot pemotong rumput ini akan dijelaskan dalam bentuk diagram alir atau flowchart seperti dapat dilihat pada Gambar 3.1 berikut ini:
Universitas Pertamina - 24
Proses dalam menyelesaikan perancangan robot pemotong rumput ini melalui beberapa tahapan sebagai berikut:
3.1.1 Studi Literatur
Studi literatur meliputi proses mencari dan mempelajari bahan referensi yang berkaitan dengan permasalahan mengenai perancangan robot pemotong rumput. Studi literatur ini diperoleh dari berbagai sumber antara lain buku, jurnal internasional dan nasional, tugas akhir yang berkaitan, dan situs internet.
3.1.2
Penentuan Konsep Perancangan
Penentuan konsep perancangan ini bertujuan untuk mendapatkan desain dan mekanisme yang optimal dengan memperlihatkan data yang telah didapatkan dari studi literatur. Pada perancangan ini akan dirancang robot pemotong rumput otomatis.
3.1.3
Analisa Kebutuhan Perancangan
Pada tahap ini, dilakukan analisis kebutuhan perancangan yang diperlukan untuk membuat robot pemotong rumput seperti komponen yang digunakan agar robot yang dibuat sesuai dengan tujuan perancangan.
3.1.4
Pembuatan Kode Program
Pada tahap ini, dilakukan pembuatan bahasa pemrograman untuk desain robot yang akan di rancang agar robot yang dibuat dapat bekerja sesuai dengan perintah yang diinginkan. Pada tahap ini pula dilakukan pemrograman logika fuzzy yang akan diimplementasikan pada robot pemotong rumput. Pemrograman logika Fuzzy dengan Arduino menggunakan library Fuzzy Logic (eFLL-master). Library ini berguna untuk mempermudah menentukan nilai membership input dan output logika Fuzzy. Pada tahap ini terdiri dari blok diagram alur kerja robot, desain kerangka robot pemotong rumput otomatis, dan desain area percobaan. Blok diagram alur kerja dari robot pemotong rumput yang ditunjukan pada Gambar 3.2
Fungsi masing-masing komponen akan dijelaskan sebagai berikut:
Arduino Uno R3 ATMega328P berfungsi sebagai pusat pengendalian robot pemotong rumput.
Sensor ultrasonik berfungsi untuk mendeteksi halangan yang terdapat didepan robot dan menghindari benturan pada saat robot melakukan gerakan sebagai input berupa pulsa yang akan dikirim ke mikrokontroler.
Sensor kompas berfungsi untuk sebagai acuan pergerakan sudut saat berbelok dan memutar dengan sempurna.
LCD (Liquid Crystal Display) berfungsi untuk menampilkan pembacaan jarak yang terdeteksi oleh sensor ultrasonik.
Universitas Pertamina - 25
Gambar 3.2 Tampilan Pembacaan Jarak pada Sensor Ultrasonik
Pembacaan jarak oleh sensor ultrasonik akan ditampilkan pada LCD dalam satuan centimeter. Pembaacaan jarak akan terus berubah secara realtime pada saat robot bergerak dan mendeteksi jarak halangan yang ada didepannya.
Driver Shield L293 akan menerima masukan dari mikrokontroller untuk mengendalikan motor DC.
Relay berfungsi sebagai saklar on/off motor pemotong rumput.
Motor DC akan menerima pulsa perintah untuk menggerakan roda robot sesuai dengan perintah yang telah diberikan.
Adapun untuk desain kerangka robot pemotong rumput ini dapat dilihat pada Gambar 3.3 dan Gambar 3.4 sebagai berikut:
Universitas Pertamina - 26
Gambar 3.4 Desain Robot Pemotong Rumput Otomatis Tampak Samping
Keterangan:
1. Sensor Ultrasonik US-100 2. Motor DC
3. Pemotong (Cutting Blade) 4. Roda nylon
Rute pergerakan robot pemotong rumput otomatis ini akan direpresentasikan pada diagram alir yang ditunjukkan pada Gambar 3.5 berikut ini
Gambar 3.5 Diagram Alir Rute Pergerakkan Robot Pemotong Rumput Otomatis
Area percobaan robot pemotong rumput otomatis berukuran 2 × 2 m. Robot ini akan menghindar ketika terdapat halangan didepannya dengan cara terus memeriksa jarak dihadapannya dengan menggunakan sensor ultrasonik HR-SC04. Jika jarak ke depan lebih besar dari 20 cm, maka robot akan bergerak maju. Jika jarak ke depan lebih kecil dari 20 cm, maka robot akan berbelok. Rute pergerakkan robot ini berbentuk zig-zag. Robot akan diletakkan di bagian sisi kiri area percobaan yaitu pada titik A dan berhenti pada titik C. Robot akan bergerak maju kedepan hingga mendeteksi sisi pembatas dengan jarak 20cm kemudian robot akan berbelok 90⁰. Desain area rute pergerakkan robot pemotong rumput dapat dilihat pada Gambar 3.6 berikut
Universitas Pertamina - 27
Gambar 3.6 Desain Area Rute Pergerakkan Robor Pemotong Rumput Otomatis
3.1.5
Pembuatan Robot
Dari tahap penentuan konsep perancangan dapat diketahui spesifikasi dari bahan dan dimensi dari komponen yang diperlukan untuk pembuatan robot. Dari komponen yang telah disiapkan kemudian dilakukan perakitan untuk membuat robot yang sesuai dengan desain yang telah dirancang.
3.1.6
Pengujian
Pada tahap ini, pengujian dilakukan dengan tujuan untuk mengetahui apakah kinerja rancangan dapat bekerja secara optimal. Dari hasil pengujian yang telah dilakukan, akan didapatkan data yang kemudian dianalisis untuk menentukan kinerja alat yang telah dirancang.
3.1.7
Evaluasi
Pada tahap evaluasi, hasil pengukuran akan di identifikasi untuk mengukur atau menilai apakah robot yang telah dibuat sesuai dengan perancangan dan tujuan yang ingin dicapai. Dari hasil pengujian tersebut akan digunakan untuk menentukan alternatif terbaik dalam memperbaiki kekurangan yang ada dimana hal tersebut dapat dijadikan sebagai acuan dalam pembuatan robot pemotong rumput otomatis selanjutnya.
Universitas Pertamina - 28
3.2
Pertimbangan Perancangan
Dalam perancangan robot pemotong rumput ini dibuat sebagai alat bantu pekerjaan manusia agar lebih mudah. Dengan sistem kerja yang sederhana, memungkinkan setiap orang dapat mengoperasikannya tanpa kesulitan. Berdasarkan hal tersebut, maka diperlukan beberapa pertimbangan perancangan sebagai berikut:
1. Konstruksi robot pemotong rumput ini telah disesuaikan dengan kenyamanan dan keamanan dalam pengoperasian alat. Dengan ukuran robot yang tidak terlalu besar dan tidak terlalu berat, menjadikan robot ini mudah untuk dipindahkan.
2. Robot ini memiliki ukuran yang tidak terlalu besar, menjadikan robot ini mudah untuk dipindahkan dan cocok untuk desain rumah tangga yang ramah lingkungan.
3. Robot ini memiliki ukuran panjang 33,5 cm, lebar 12,5 cm, dan tinggi 10 cm. 4. Kerangka robot ini menggunakan acrylic dengan tebal sebesar 3 mm
5. Untuk mengoperasikan robot pemotong rumput ini, pengguna hanya perlu menghidupkan robot sehingga robot akan bergerak sesuai dengan program yang telah diberikan.
3.3
Analisis Teknik
Secara teknis, robot pemotong rumput yang telah dirancang harus memenuhi tujuan perancangan, yaitu untuk mempermudah dan membantu pekerjaan manusia dalam memotong rumput. Dalam perancangan ini, robot yang akan dibuat dalam skala kecil, namun tujuan dan fungsi dari robot tetap dapat diimplementasikan. Oleh karena itu, secara teknis robot pemotong rumput yang dirancang harus dapat memenuhi kualifikasi sebagai berikut:
1. Pembacaan jarak terhadap halangan sebesar 30 cm
Gambar 3.7 Jarak terhadap Halangan
Dari Gambar tersebut dapat dilihat, jarak badan robot dengan ujung pisau sebesar 28cm. sedangkan, dari ujung pisau terhadap halangan diberikan selisih jarak 2cm, agar tidak terjadi kerusakan pada pisau saat berputar yang diakibatkan karena tidak terdapat selisih jarak antara ujung pisau dengan halangan.
Universitas Pertamina - 29
Kriteria perancangan dari kecepatan putaran blade yang diajukan sebesar 4000rpm. Berdasarkan standar pemotongan rumput, dibutuhkan kecepatan putaran pada pisau pemotongan minimal 1400rpm untuk menghasilkan kualitas pemotongan yang baik. Oleh karena itu, untuk mencapai standar pemotongan tersebut, maka kriteria kecepatan putaran blade yang diajukan sebesar 4000rpm.
3. Waktu pemotongan untuk area 2 × 2 m sebesar ± 3 menit.
Pada kriteria perancangan yang diajukan, waktu pemotongan rumput pada area 2 x 2 m pada robot pemotong rumput otomatis dengan menggunakan logika fuzzy sebesar
± 3 menit. Hal ini dilakukan untuk menghemat waktu dan daya baterai yang digunakan.
4. Ketinggian pemotongan rumput setinggi 2 cm.
Kriteria ketinggian pemotongan yang diajukan sebesar 2 cm. Penentuan ketinggian pemotongan ini dilakukan agar pemotongan rumput tidak terlalu pendek dan tidak terlalu tinggi dikarenakan hal ini akan mempengaruhi kualitas dari rumput itu sendiri.
5. Daya tahan baterai ± 2 jam.
Kriteria daya tahan baterai yang diajukan sebesar ± 2 jam. Hal ini diharapkan robot dapat melakukan beberapa kali pemotongan sehingga dapat menghemat pengeluaran dalam penggunaan robot pemotong rumput otomatis ini.
3.4
Peralatan dan Bahan
Peralatan dan bahan yang digunakan dalam pembuatan rancangan robot pemotong rumput ini ditunjukan pada Tabel 2.1 dan Tabel 2.2
Tabel 3.1 Peralatan yang digunakan pada pembuatan Robot Pemotong Rumput Otomatis
No. Peralatan Jumlah
1. Solder 1 Buah
2. Cutter 1 Buah
3. Penyedot Timah 1 Buah
4. Obeng 1 Buah
Tabel 3.2 Bahan yang digunakan pada pembuatan Robot Pemotong Rumput Otomatis
No. Bahan Jumlah Harga Satuan Jumlah
1. Arduino Uno R3 ATMega328P
1 Buah Rp. 62.500,- Rp. 62.500,-
2. Car Chasis dengan 4 Gearbox + 4 roda
Universitas Pertamina - 30
3. Modul Driver Motor L293D 2 Buah Rp. 17.000,- Rp. 34.000,- 4. Sensor Ultrasonik HC-SR04 1 Buah Rp. 9.000,- Rp. 9.000,- 5. Sensor Kompas HMC5883L 1 Buah Rp. 30.000,- Rp. 30.000,-
6. Liquid Crystal Display + IIC
1 Buah Rp. 30.000,- Rp. 30.000,-
7. Relay 5V 1 Buah Rp. 9.500,- Rp. 9.500,-
8. DC Motor 1 Buah Rp. 65.000,- Rp. 65.000,-
9. Baterai 18650 3,7V 6 Buah Rp. 5.000,- Rp. 30.000,-
10. Holder Battery 9V with switch On-Off
2 Buah Rp. 8.000,- Rp. 16.000,-
11. Pemotong (Cutting Blade)
1 Buah Rp. 10.000,- Rp. 10.000,-
12. Timah Gulung 0.8 mm 1 Gulung Rp. 10.000,- Rp. 10.000,-
13. Kabel Jumper Male-Female
1 Set Rp. 12.000,- Rp. 12.000,-
Jumlah Rp. 415.000,-
Alat dan bahan yang digunakan pada perancangan robot pemotong rumput otomatis ini akan rangkai dan dihubungkan pada Arduino sebagai masukan dan keluaran. Sensor kompas dan sensor ultrasonik digunakan sebagai masukan pada Arduino, sedangkan driver motor dan relay digunakan sebagai keluaran pada Arduino.
Rangkaian sistem perancangan robot pemotong rumput otomatis ini secara keseluruhan dapat dilihat pada Gambar. dibawah ini
Universitas Pertamina - 31
Universitas Pertamina - 33
BAB 4
HASIL DAN PEMBAHASAN
Pada bab ini akan menampilkan hasil dan analisis dari pengujian terhadap masing-masing komponen dengan tujuan untuk mengetahui hasil dari perancangan yang telah dibuat. pada bab ini juga kana menampilkan uji performance tracking robot pemotong rumput berdasarkan jarak terhadap halangan yang ada di depannya. Selain itu, akan ditampilkan hasil dan analisa kecepatan putaran roda ban pada robot pemotong rumput otomatis dengan menggunakan logika fuzzy.
4.1
Pembuatan Robot Pemotong Rumput Otomatis
Tahap selanjutnya setelah proses perancangan adalah pembuatan robot pemotong rumput otomatis sesuai dengan rancangan dan spesifikasi alat yang telah ditentukan sebelumnya. Pada perancangan robot pemotong rumput otomatis ini, diperlukan blok diagram sistem untuk memudahkan dan memastikan robot dapat bekerja sesuai dengan desain yang telah di buat. Adapun, blok diagram sistem robot pemotong rumput otomatis dapat dilihat pada Gambar 4.1 beriku ini
Gambar 4.1 Blok Diagram Robot Pemotong Rumput Otomatis
Pada proses pembuatan robot pemotong rumput otomatis ini, maka diperlukan beberapa komponen seperti mikrokontroller Arduino Uno R3, sensor ultrasonik HC-SR04 dan sensor kompas GY-271, serta Aktuator berupa motor DC. Untuk tampilan data menggunakan LCD 16 × 2 dan relay 5V berfungsi sebagai saklar on/off pada motor DC Pemotong.
Universitas Pertamina - 34
Berikut adalah Gambar. Menunjukan hasil pembuatan robot pemotong rumput otomatis tampak samping, tampak atas, tampak depan, dan tampak belakang
(a) (b)
(c) (d)
Gambar 4.2 Robot Pemotong (a) Tampak samping; (b) Tampak Atas; (c) Tampak Depan; (d) Tampak Belakang.
4.2
Pengujian Sistem
4.2.1
Pengujian
Liquid Crystal Display
(LCD)
Universitas Pertamina - 35
LCD pada sistem ini digunakan untuk menampilkan data keluaran yang dihasilkan dari pembacaan sensor. Pengujian LCD dilakukan dengan tujuan untuk mengetahui apakah LCD dapat berfungsi dengan baik untuk menampilkan 32 karakter pada 2 kolom sesuai dengan masukan. Pengujian LCD dilakukan dengan cara menampilkan data yang dibaca oleh sensor ultrasonik. Hasil pengujian LCD dapat dilihat pada Gambar 4.1 berikut ini
Gambar 4.4 Hasil Pengujian LCD
Berdasarkan hasil pengujian LCD menunjukkan bahwa LCD dapat menampilkan data pembacaan dari sensor ultrasonik berupa nilai jarak yang terukur oleh sensor ultrasonik dan tampilan waktu yang dibutuhkan robot dalam pemotongan rumput secara keseluruhan.
4.2.2
Pengujian Sensor Ultrasonik
Gambar 4.5 Rangkaian Pengujian Sensor Ultrasonik HC-SR04
Sensor ultrasonik digunakan untuk mengukur jarak terhadap suatu objek dengan menggunakan gelombang ultrasonik. Pengukuran tersebut berdasarkan selisih antara waktu pemancar gelombang oleh transmitter dan waktu ketika gelombang pantul diterima receiver. Pembacaan jarak oleh sensor ultrasonik ini dimaksudkan sebagai masukan untuk mengetahui respon robot terhadap halangan yang ada didepannya. Pada pengujian ini bertujuan untuk mengkalibrasi sensor ultrasonik yang akan digunakan. Pengujian ini akan membandingkan pembacaan jarak yang terdeteksi oleh sensor ultrasonik dengan pengukuran jarak secara manual dengan menggunakan penggaris atau mistar.
Hasil pengukuran jarak menggunakan sensor ultrasonik dan pengukuran manual dengan penggaris atau meteran akan disajikan pada Tabel 4.1 berikut ini.
Universitas Pertamina - 36
Tabel 4.1 Hasil Pengukuran Jarak Menggunakan Sensor Ultrasonik
Percobaan Ke-
Pengukuran manual (cm)
Pengukuran dengan Sensor Ultrasonik (cm) Error (%) Uji coba 1 Uji coba 2 Uji coba 3 Rata-rata 1 20 19,19 19,13 19,21 19,18 4,10 2 40 38,43 38,51 38,38 38,44 3,90 3 60 57,74 57,65 57,72 57,70 3,83 4 80 77,08 76,85 76,92 76,95 3,81 5 100 95,89 96,14 96,33 96,12 3,88 6 120 115,47 115,40 115,56 115,47 3,77 7 140 134,72 134,94 134,78 134,81 3,71 8 160 154,13 154,35 154,21 154,23 3,61 9 180 173,42 173,59 173,76 173,65 3,53 10 200 193,07 193,13 192,98 193,06 3,47 Rata-rata 3,76 %
Pengujian terhadap sensor ulrasonik dilakukan sebanyak 10 kali percobaan dengan jarak yang berbeda-beda mulai dari jarak 20cm hingga 200cm. Pengujian terhadap sensor ultrasonik ini dilakukan secara bersamaan dengan pengukuran jarak secara manual dengan meteran. Pembacaan jarak dengan sensor ultrasonik untuk masing-masing jarak dilakukan sebanyak 3 kali percobaan. Pada percobaan pertama, halangan didepan sensor diletakkan sejauh 20cm yang diukur dengan menggunakan penggaris. Sensor ultrasonik berhasil mendeteksi halangan tersebut dengan nilai pembacaan jarak sebesar 19,19cm, 19,13cm, dan 19,21 cm. pembacaan jarak rata-rata oleh sensor ultrasonik pada percobaan pertama sebesar 19,18cm dengan nilai error sebesar 4,10%. Pada percobaan kedua, jarak yang terukur secara manual dengan penggaris sejauh 40cm dan jarak rata-rata yang terdeteksi oleh sensor ultrasonik adalah 38,44 dengan nilai error sebesar 3,90%. Pada percobaan ketiga hingga kesembilan memiliki nilai error secara berturut-turut adalah 3,83%, 3,81%, 3,88%, 3,77%, 3,71%, 3,61%, 3,53%, dan 3,47%. Sedangkan pada percobaan kesepuluh, jarak yang terukur secara manual dengan penggaris sejauh 200cm dan jarak rata-rata yang terdeteksi oleh sensor ultrasonik adalah 193,06 cm dengan nilai error sebesar 3,47%.
Berdasarkan karakteristik dan data sheet dari sensor ultrasonik HC-SR04, sensor ini dapat mendeteksi dengan rentang jarak minimal sebesar 2 cm dan jarak maksimal sebesar 400 cm. Kemudian, hasil pengukuran jarak yang terbaca oleh sensor ultrasonik akan ditampilkan pada LCD. Cara menghitung error yang didapatkan dari perhitungan pengukuran pembacaan sensor dengan pengukuran dapat dihitung dengan persamaan berikut
𝑒𝑟𝑟𝑜𝑟 =𝐽𝑎𝑟𝑎𝑘 𝑚𝑎𝑛𝑢𝑎𝑙 − ∑ 𝐽𝑎𝑟𝑎𝑘 𝑜𝑙𝑒ℎ 𝑠𝑒𝑛𝑠𝑜𝑟
𝐽𝑎𝑟𝑎𝑘 𝑚𝑎𝑛𝑢𝑎𝑙 × 100% [1]
Sebagai contoh percobaan pertama pengukuran jarak halangan didepan robot sejauh 20 cm. pada pengujian dilakukan pengukuran dengan menggunakan sensor ultrasonik HC-SR04 dengan pengkuran manual sebagai perbandingan. Dari kedua pengukuran tersebut, dapat dihitung nilai error pengukuran jarak pada sensor ultrasonik.

![Gambar 2.5 Module Driver Motor L298N [11] 2.6 Sensor Kompas HMC5883L](https://thumb-ap.123doks.com/thumbv2/123dok/2778991.2276653/24.892.53.759.77.931/gambar-module-driver-motor-l-sensor-kompas-hmc.webp)
![Gambar 2.7 Relay 12V [13] 2.8 LCD (Liquid Crystal Display)](https://thumb-ap.123doks.com/thumbv2/123dok/2778991.2276653/25.892.50.719.69.918/gambar-relay-v-lcd-liquid-crystal-display.webp)
![Tabel 2.2 Spesifikasi Motor DC 12V [15]](https://thumb-ap.123doks.com/thumbv2/123dok/2778991.2276653/26.892.45.710.64.837/tabel-spesifikasi-motor-dc-v.webp)
![Gambar 2.10 Fungsi Segitiga [15]](https://thumb-ap.123doks.com/thumbv2/123dok/2778991.2276653/27.892.49.756.57.1160/gambar-fungsi-segitiga.webp)
![Gambar 2.12 Fuzzy Set Operation: Min-max Operation [16] Persamaan Min-Max operation untuk operator OR (](https://thumb-ap.123doks.com/thumbv2/123dok/2778991.2276653/28.892.48.718.50.1261/operation-operation-persamaan-operation-ditunjukkan-persamaan-operator-ditunjukkan.webp)
![Gambar 2.14 Fuzzy Set Operation: Algebraic Sum [16] Persamaan Algebric Sum ditunjukkan pada persamaan 7 berikut ini:](https://thumb-ap.123doks.com/thumbv2/123dok/2778991.2276653/29.892.46.755.39.1233/gambar-operation-algebraic-persamaan-algebric-ditunjukkan-persamaan-berikut.webp)
![Gambar 2.16 Fuzzy Set Operation: Bounded Sum [16] Persamaan Bounded Sum ditunjukkan pada persamaan 9 berikut ini:](https://thumb-ap.123doks.com/thumbv2/123dok/2778991.2276653/30.892.52.746.18.1241/gambar-operation-bounded-persamaan-bounded-ditunjukkan-persamaan-berikut.webp)
