21
BAB 3
TAHAPAN STUDI
Dalam bab ini akan dibahas rangkaian prosedur yang dilakukan dalam penelitian ini yang dimulai dari peralatan yang digunakan, proses kalibrasi kamera, uji coba, dan pengambilan data di lapangan. Beberapa prosedur yang ada di dalam bab ini dilakukan mengikuti hasil penelitian penulis lain untuk memperoleh hasil yang terbaik.
3.1 Alat
Pada penelitian ini digunakan berbagai instrumen dalam proses pengambilan datanya. Berikut akan dijelaskan alat-alat yang digunakan beserta dengan spesifikasinya masing-masing.
3.1.1 Kamera
Kamera adalah peralatan yang paling utama digunakan dalam pengambilan data. Pada pengambilan foto terestris digunakan kamera dijital Nikon D5000 dan Nikon D60, sedangkan untuk foto udaranya digunakan kamera Canon PowerShot S90. Spesifikasi dari masing-masing kamera adalah sebagai berikut:
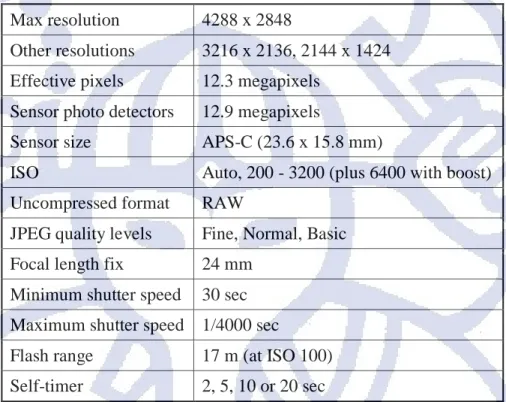
1. Kamera Nikon D5000
22
Tabel 3-1 Spesifikasi Kamera Nikon D5000 (sumber: Max resolution 4288 x 2848
Other resolutions 3216 x 2136, 2144 x 1424 Effective pixels 12.3 megapixels
Sensor photo detectors 12.9 megapixels
Sensor size APS-C (23.6 x 15.8 mm)
ISO Auto, 200 - 3200 (plus 6400 with boost) Uncompressed format RAW
JPEG quality levels Fine, Normal, Basic Focal length fix 24 mm
Minimum shutter speed 30 sec Maximum shutter speed 1/4000 sec
Flash range 17 m (at ISO 100) Self-timer 2, 5, 10 or 20 sec
2. Kamera Nikon D60
23
Tabel 3-2 Spesifikasi kamera Nikon D60 (sumber: Max resolution 3872 x 2592
Other resolutions 2896 x 1944, 1936 x 1296 Effective pixels 10.2 megapixels
Sensor photo detectors 10.8 megapixels
Sensor size APS-C (23.6 x 15.8 mm)
ISO Auto, 100, 200, 400, 800, 1600, (plus 3200 with boost) JPEG quality levels Fine (1:4), Normal (1:8), Basic (1:16)
Focal length (fix) 35 mm Minimum shutter speed 30 sec Maximum shutter speed 1/4000 sec
Flash range 12 m (at ISO 100) Self-timer 2 or 10 sec
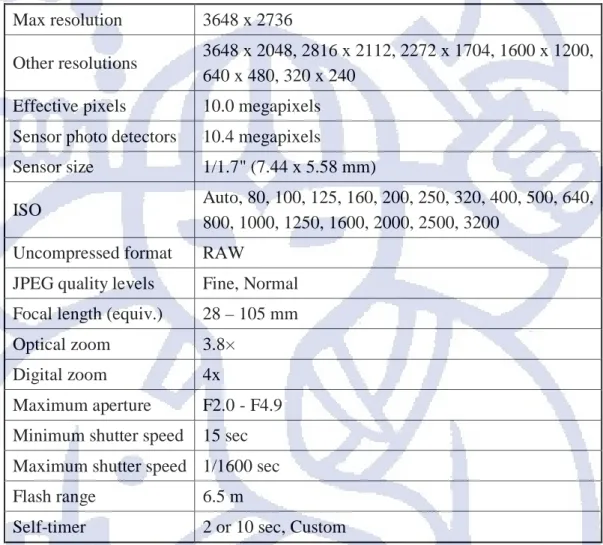
3. Kamera Canon PowerShot S90
24
Tabel 3-3 Spesifikasi kamera Canon PowerShot S90 (sumber: Max resolution 3648 x 2736
Other resolutions 3648 x 2048, 2816 x 2112, 2272 x 1704, 1600 x 1200, 640 x 480, 320 x 240
Effective pixels 10.0 megapixels Sensor photo detectors 10.4 megapixels
Sensor size 1/1.7" (7.44 x 5.58 mm)
ISO Auto, 80, 100, 125, 160, 200, 250, 320, 400, 500, 640, 800, 1000, 1250, 1600, 2000, 2500, 3200
Uncompressed format RAW
JPEG quality levels Fine, Normal Focal length (equiv.) 28 – 105 mm Optical zoom 3.8×
Digital zoom 4x
Maximum aperture F2.0 - F4.9 Minimum shutter speed 15 sec Maximum shutter speed 1/1600 sec Flash range 6.5 m
Self-timer 2 or 10 sec, Custom
3.1.2 UAV
UAV adalah pesawat model tanpa awak yang dapat dikendalikan dengan radio kontrol. Pesawat model ini kemudian di modifikasi dengan diberikan dudukan sehingga mampu membawa kamera dijital Canon PowerShot S90 untuk melakukan pengambilan gambar di udara. Pesawat ini dikendalikan secara manual hanya pada saat mengudara dan saat mendarat, selebihnya sistem pilot otomatis yang akan mengendalikan jalur terbang pesawat tersebut ketika pemotretan berlangsung.
3.2 Kalibrasi Kamera
Kalibrasi kamera bertujuan untuk memodelkan dan menentukan nilai distorsi dan konstanta sistem optik yang ada pada kamera. Parameter-parameter tersebut adalah distorsi radial (K1, K2, K3), focal length (c), koordinat principal point (xp,yp)
25
dan distorsi tangensial (P1, P2). Frame kalibrasi yang digunakan adalah sebuah plat besi yang telah ditempeli target dari perangkat lunak Australis 7.
Gambar 3-4 Frame kalibrasi Australis 7
Berikut adalah langkah dalam melakukan kalibrasi kamera:
1. Kalibrasi kamera dilakukan dengan metode kalibrasi in-field dan
pelaksanaanya dilakukan dalam beberapa set untuk mendapatkan ukuran lebih. Satu set data dilakukan sebanyak 8 kali foto untuk 4 sisi frame kalibrasi yang dibagi dalam 4 posisi kamera landscape dan 4 posisi kamera portrait. 2. Pemotretan dilakukan dengan menggunakan tripod dan self-timer untuk
mengurangi efek getar dari pengambil foto, sehingga foto yang dihasilkan lebih stabil.
3. Frame kalibrasi yang digunakan adalah frame dengan target berkode retro
reflective, sehinggapengambilan gambar untuk kalibrasi diusahakan dalam
keadaan gelap dan pemotretan dilakukan menggunakan blitz.
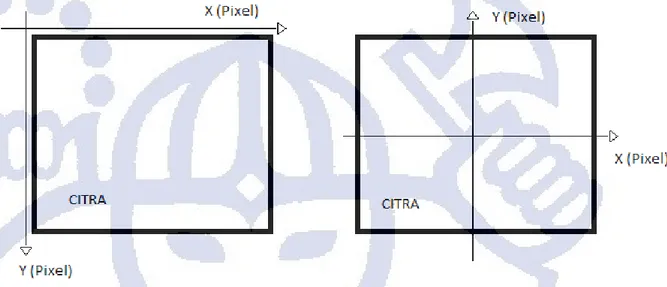
4. Pengolahan data dilakukan untuk setiap set pada perangkat lunak Australis 7. Hasil kalibrasi dari perangkat lunak Australis ini tidak bisa langsung digunakan ke dalam perangkat lunak PhotoModeler Scanner karena terdapat perbedaan nilai koordinat principal point dari kedua perangkat lunak tersebut, sehingga harus disesuaikan terlebih dahulu sebelum digunakan.
26
Gambar 3-5 Posisi Principal Point Australis (kiri) dan Photomodeler Scanner (kanan)
3.3 Pengambilan Data
Pengambilan data objek dilakukan pada area lanskap Campus Center Institut Teknologi Bandung yang terletak di Jalan Ganesha 10, Bandung, Propinsi Jawa Barat. Dalam Tugas Akhir ini pengukuran dilakukan dengan metode fotogrametri rentang dekat dimana metode ini terbagi menjadi dua tahap, yaitu secara UAV Fotogrametri dan secara terestris.
3.3.1 UAV Fotogrametri
Pengambilan data dilakukan dengan menggunakan pesawat model Easy Star yang dilengkapi dengan kamera Canon PowerShot S90. Data diambil secara berurutan dan berkesinambungan mengikuti jalur terbang pesawat yang telah direncanakan sebelumnya. Saat perencanaan jalur terbang diusahakan agar terjadi pertampalan yang cukup besar antar foto baik itu pertampalan ke depan ataupun pertampalan ke samping agar foto dapat diorientasikan dan model yang diciptakan juga akan menjadi lebih baik. Untuk daerah Campus Centre didapatkan total 59 foto udara.
27
Gambar 3-6 Foto udara dari UAV Easy Star
3.3.2 Terestrial Fotogrametri
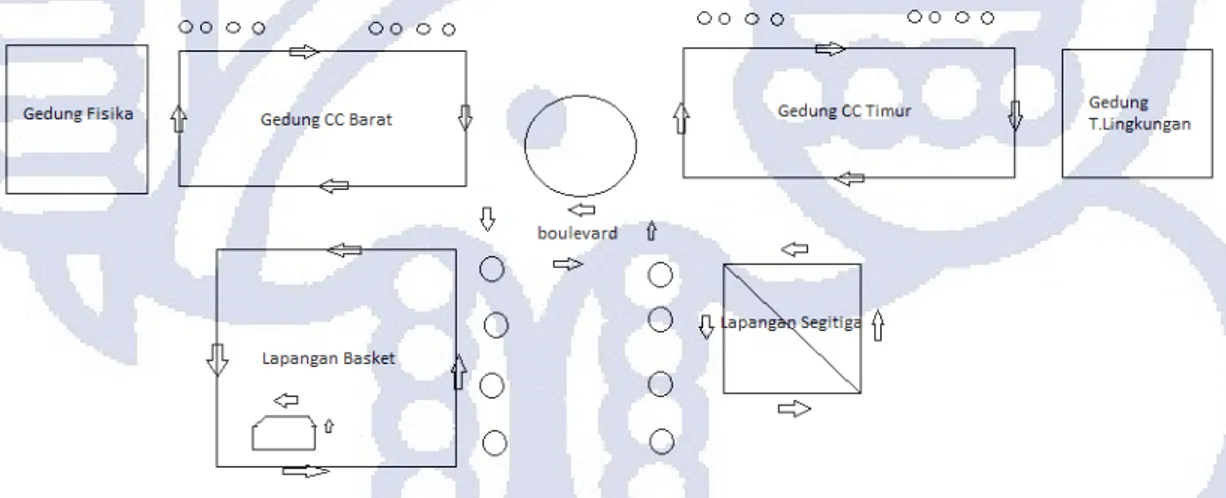
Pengambilan data foto pada tahap ini dilakukan pada rentang waktu pagi hingga siang hari menggunakan kamera Nikon D5000 dengan panjang lensa 24mm untuk bangunan Campus Center Barat dan Timur, sedangkan kamera Nikon D60 dengan panjang lensa 35mm untuk foto area lanskap lapangan lapangan basket, lapangan segitiga, dan boulevard pada rentang waktu siang hingga sore hari.
Gambar 3-7 Sketsa proses pengambilan data
Pengambilan gambar objek dilakukan secara konvergen yang dimaksudkan agar mencakup keseluruhan area objek. Setiap pemotretan dilakukan dengan menggunakan tripod dan self-timer untuk mengurangi efek getaran saat mengambil foto. Foto diambil lebih banyak pada area yang kompleks, contohnya podium
28
lapangan basket dan sisi gedung yang tertutup pohon agar mendapatkan titik sekutu yang cukup dalam proses marking foto. Kemudian bangunan Campus Centre Barat diambil sebanyak 59 data dan Campus Centre Timur sebanyak 75 data dengan cara pengambilan data mengitari bangunan tersebut.
Gambar 3-8 Foto Campus Center Barat dan Timur menggunakan kamera Nikon D5000
Untuk area lapangan basket diambil data foto sebanyak 120 foto, untuk area lapangan segitiga 45 foto, sedangkan untuk area boulevard diambil sebanyak 68 foto.
Gambar 3-9 Foto area lapangan basket dan lapangan segitiga menggunakan kamera Nikon D60
Gambar 3-10 Foto area Boulevard menggunakan kamera Nikon D60 Foto yang diambil akan dikelompokkan sesuai dengan daerah
project-29
project yang berbeda dalam perangkat lunak PhotoModeler Scanner. Hal ini
dilakukan untuk mempermudah dalam pengerjaannya yang nantinya semua project
tersebut akan digabungkan dengan hasil model menggunakan foto udara UAV. 3.4 Pemodelan 3 Dimensi
Pada penelitian ini proses pemodelan 3 Dimensi dilakukan dengan cara
marking dan perataan berkas yang merupakan proses dalam pemodelan sparse point
cloud.
3.4.1 Marking
Marking adalah proses penandaan pada foto-foto yang bertampalan untuk
dijadikan acuan dalam membuat model 3 dimensinya. Penandaan proses marking ini menggunakan titik-titik objek natural yang terlihat pada foto. Penentuan titik marking diatur sedemikian rupa agar titik tersebut dapat terlihat pada 3 buah foto atau lebih. Hal ini dilakukan karena keterbatasan proses orientasi pada perangkat lunak photomodeler scanner walaupun pada teorinya hanya dibutuhkan penampakan pada 2 buah foto saja. Tingkat ketelitian pada proses marking ini sangat dipengaruhi oleh ketelitian orang yang melakukan marking dan juga resolusi kamera yang digunakan.
Proses marking yang dilakukan pada foto UAV lebih dikhususkan pada area atap gedung dan bentuk lapangan serta jalan. Kemudian proses marking foto terrestrial dikhususkan pada area yang lebih mendetail terutama area vertikal yang tidak dapat terlihat pada foto udara seperti sisi gedung dan tangga.
30
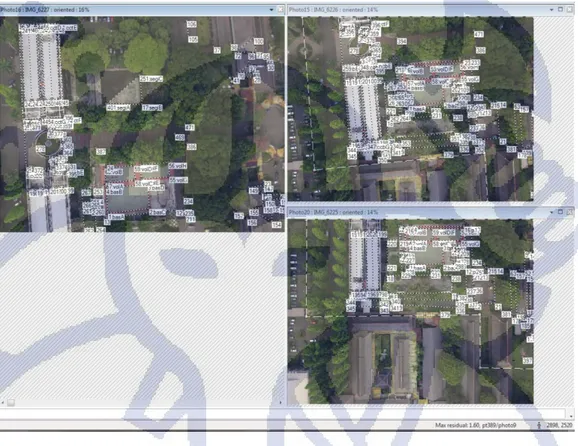
Gambar 3-11Marking foto udara
31 3.4.2 Perataan Berkas
Selanjutnya pada foto-foto yang telah dilakukan proses marking secara manual kemudian dilakukan proses perataan berkas dengan perangkat lunak
PhotoModeler Scanner. Dalam proses ini titik-titik objek natural yang di marking
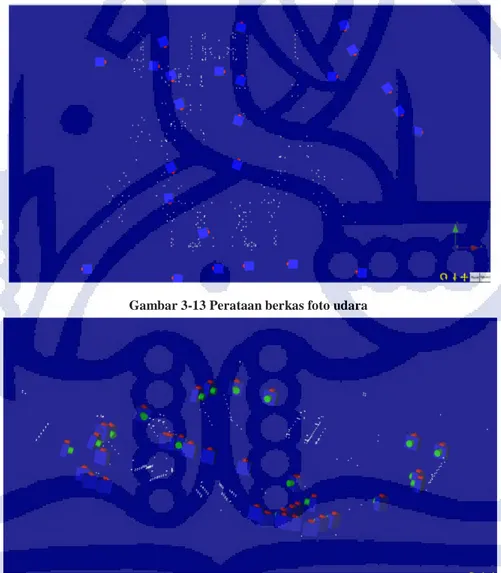
akan diidentifikasi dan direferensikan antar foto. Titik-titik inilah yang kemudian akan dijadikan sebagai titik ikat dalam tahap perataan berkas. Minimal terdapat 6 titik yang terlihat dari 2 foto yang bertampalan untuk digunakan dalam proses perataan berkas sesuai dengan prinsip Von Gruber dalam teori fotogrametri. Setiap kamera akan diketahui posisinya terhadap ruang dan setiap titik ikat akan memiliki koordinat 3 dimensi setelah dilakukan proses perataan berkas. Dengan diketahui posisi relatif kamera terhadap ruang, maka dapat ditambahkan marking titik-titik detail dan marking garis sesuai dengan bentuk geometri yang akan dimodelkan.
Gambar 3-13 Perataan berkas foto udara
32
Posisi semua kamera dapat diorientasi dengan benar setelah proses perataan berkas berhasil dilakukan. Dengan diketahui orientasi seluruh kamera tersebut kemudian dapat ditambahkan titik-titik detail lainnya pada objek yang ingin dimodelkan yang terlihat pada foto, juga ditambahkan marking lain berbentuk garis, silinder, atau kurva untuk memvisualisasikan bentuk objek pada perangkat lunak
PhotoModeler Scanner.
Gambar 3-15 Penambahan titik detail dan marking garis pada foto udara 3.4.3 Penyekalaan (Scalling)
Setelah model 3D dengan sparse point selesai dibuat, langkah selanjutnya adalah melakukan proses penyekalaan dari model agar sesuai dengan ukuran sebenarnya. Pengukuran panjang sebenarnya dilakukan menggunakan pita ukur pada salah satu sisi gedung Campus Centre, pada panjang dan lebar lapangan voli. Serta panjang sisi lapangan segitiga, untuk kemudian proses penyekalaannya dilakukan pada perangkat lunak photomodeler. Proses pengukuran di lapangan dilakukan dengan pengambilan sampel panjang sisi bangunan gedung Campus Centre ITB dan pengambilan sampel ukuran panjang pada tangga boulevard, tangga lapangan segitiga, dan lapangan basket. Hasil panjang ukuran tersebut kemudian dipadankan dengan bagian yang sama pada model agar ukuran model menjadi sama dengan keadaan sebenarnya. Proses penyekalaan ini dilakukan pada beberapa sisi menggunankan constraint karena untuk panjang sisi lain akan mengikuti ukuran panjang dinding yang telah ada dan diharapkan proses penyekalaan ini dapat merata pada seluruh model.
33 3.4.4 Proses penggabungan project
Pada proses ini dilakukan penggabungan beberapa project dalam perangkat lunak PhotoModeler Scanner dengan menggunakan hasil model 3 Dimensi dari foto udara sebagai project utama. Untuk melakukan merge project ini diperlukan penamaan titik objek natural yang unik yang sama antara project foto udara dan project foto terrestrial. Dalam hal ini titik objek natural yang digunakan adalah titik detail pojok atap bangunan dan titik detail pojok lapangan. Dalam proses penggabungan project ini diperlukan minimal 3 titik yang memiliki penamaan yang sama dan unik antara 2 project, hal ini dilakukan untuk mendapatkan parameter translasi, penyekalaan dan rotasi sehingga hasil penggabungan project akan tepat dan terorientasi dengan project utama.
Gambar 3-16 Proses penamaan objek natural pada foto udara dan Campus Centre Barat
Hal yang perlu diperhatikan dalam melakukan proses penggabungan project
adalah urutan memasukkan project dalam perangkat lunak PhotoModeler Scanner. Project utama atau dalam hal ini model dari foto UAV harus dimasukkan lebih awal daripada model dari foto terestris agar proses yang terjadi adalah model dari foto terestris menyesuaikan dengan model dari foto UAV bukan sebaliknya, sedangkan untuk urutan foto project terestris selanjutnya tidak masalah.
34
Gambar 3-17 Proses penggabungan antar project
Masing-masing project dalam pengerjaan Tugas Akhir ini masih menggunakan koordinat model karena tidak dilakukan pengambilan data koordinat pada setiap project terestris. Jika ingin dibuat model yang akurat dan memiliki koordinat tanah yang baik, maka semua project harus memiliki sistem koordinat yang sama. Project yang telah dilakukan proses merge juga tidak dilakukan proses lagi di dalam PhotoModeler Scanner agar model yang telah jadi tidak berubah dari kondisi awalnya.
3.5 Visualisasi Lanskap
Proses visualisasikan desain lanskap kemudian dilanjutkan pada perangkat lunak Google SketchUp. Dari perangkat lunak PhotoModeler Scanner file project hasil merge di export dalam bentuk format .dxf yang dapat dibuka oleh Google
SketchUp. Kemudian model 3 Dimensi pada perangkat lunak ini ditambahkan fitur
pohon karena pada perangkat lunak PhotoModeler Scanner tidak terdapat alat untuk menambahkan fitur pohon dan sangat sulit untuk memvisualisasikan pohon dalam perangkat lunak ini.