PENGUJIAN KINERJA TRAKTOR MINI
DENGAN KENDALI NIRKABEL
SKRIPSI
SALMAN AL FARISI
F14080041
FAKULTAS TEKNOLOGI PERTANIAN
INSTITUT PERTANIAN BOGOR
BOGOR
2012
PERFORMANCE TEST OF WIRELESS CONTROLLED
MINI TRACTOR
Salman Al Farisi and Radite Praeko Agus Setiawan
Department of Mechanical and Biosystem Engineering, Faculty of Agricultural Engineering and Technology, Bogor Agricultural University,
IPB Darmaga Campus, PO Box 220, Bogor, West Java, Indonesia Phone 62 856 8811082, e-mail: [email protected]
ABSTRACT
In untrained situation, unmanned vehicles has been implemented with Artificial Intelligence as robots. The role of the human is still needed, because in many cases robots cannot take the proper decision. The purposes of this research was to test the performance of mini tractor controlled by a wireless device using SPC Wireless Gamepad Interface. Mini tractor used in this research was the Kubota B6100 with modification in steering control system. A remote controlled DC motor was connected to the steering wheel with pulley and belt transmission. An operator with the wireless controller controlled the direction of the tractor by controlling tractor's steering through DC motor. Factors that effected of the operation were operator's visibility, land topography and maximum range of the receiver. Turning radius of a normally operated mini tractor in clockwise direction in average was 2.24 meter and counter clockwise was 2.25 meter. In remote control method, the clockwise turning radius was 2.26 meter dan counter clockwise was 2.29 meter. Tillage test was also conducted using moldboard plow. The result showed that the Effective Field Capacity of a remotely controlled mini tractor was 0.030 ha/h, with 61.0% field efficiency. By using the conventional steering by a operator, the Effective Field Capacity was 0.025 ha/h with 57.7% field efficiency.
Salman Al Farisi. F14080041. Pengujian Kinerja Traktor Mini Dengan Kendali Nirkabel. Di bawah bimbingan Radite Praeko Agus Setiawan. 2012.
RINGKASAN
Dalam implementasi di lapangan, operasi alat dan mesin pertanian seringkali dalam kondisi lingkungan yang tidak baik untuk operator, seperti kondisi cuaca yang ekstrim, lingkungan yang tidak sehat hingga berbahaya bagi operator. Unmanned vehicle atau yang lebih dikenal dengan kendaraan tanpa awak sudah diterapkan secara luas pada bidang militer untuk melakukan pekerjaan-pekerjaan yang berbahaya jika dilakukan secara konvensional dengan operator di lapangan, namun pada bidang pertanian implementasi ini masih terbatas. Penerapan robotika pada pertanian sudah diterapkan dengan Artificial Intelligence (AI), namun terbatas pada pengolahan komoditas pertanian pasca panen. Pengembangan unmanned vehicle dalam bidang pertanian di Indonesia, terutama traktor pertanian, dirasakan sangat perlu. Peran manusia tetap diperlukan untuk pengendalian kemudi, karena dalam beberapa hal, traktor robot tidak dapat mengambil keputusan yang tepat dalam menghadapi permasalahan di lapangan. Untuk menjawab permasalahan itu, diperlukan alat dan mesin pertanian yang dapat dikendalikan dari jarak jauh sehingga kegiatan pertanian menggunakan mesin akan lebih aman, nyaman dan mengurangi kelelahan fisik pada penggunanya.
Penelitian ini bertujuan untuk menguji kinerja traktor mini (Kubota B6100) dengan sistem kendali secara nirkabel menggunakan remote control SPC Wireless Gamepad Interface pada pekerjaan pembajakan. Kinerja yang akan diuji dalam penelitian ini adalah perbandingan kestabilan arah gerak traktor, besarnya radius putar dan kapasitas serta efisiensi pengolahan antara kendali konvensional dengan operator berada di traktor dan kendali nirkabel melalui alat pengendali jarak jauh (remote control).
Ada dua bagian yang dikendalikan dalam sistem pengendalian kemudi traktor secara nirkabel, yaitu tuas gas untuk mengatur besar kecepatan traktor dan roda kemudi untuk mengatur arah belok traktor. Pada pengujian di lahan, tuas gas yang dioperasikan secara nirkabel dapat berfungsi dengan baik dan beroperasi dengan stabil. Mekanisme penyaluran tenaga dari motor DC ke roda kemudi menggunakan transmisi sabuk dan puli tipe Timing Belt juga berfungsi dengan baik. Pengujian terhadap sistem kemudi nirkabel dilakukan dengan cara uji putar. Uji radius putar bertujuan untuk membandingkan radius putar antara kendali traktor secara konvensional menggunakan roda kemudi dengan kendali jarak jauh menggunakan SPC wireless controller. Uji radius putar dilakukan dengan cara mengukur radius putar yang dibentuk dari satu putaran penuh serta membandingkan besarnya radius putar searah jarum jam dan berlawanan arah jarum jam. Pengujian dilakukan dengan dua perlakuan, yaitu dengan menekan pedal rem secara penuh dan tanpa menginjak pedal rem. Pada kendali jarak jauh, perbedaan radius putar yaitu 0.02 m lebih besar pada putaran searah jarum jam tanpa rem, 0.015 m lebih besar pada putaran searah jarum jam dengan rem, 0.045 m lebih besar pada putaran berlawanan arah jarum jam tanpa rem dan 0.1 m lebih kecil pada putaran berlawanan arah jarum jam dengan rem dibandingkan dengan kendali konvensional.
Untuk mengetahui perbandingan hasil kinerja traktor antara kendali konvensional dan kendali nirkabel dilakukan pengujian kapasitas lapang. Sebelum dilakukan pengujian, three point hitch pada traktor yang sebelumnya tidak berfungsi telah dimodifikasi sehingga dapat dipasang implemen pengolahan tanah. Data yang diambil dalam uji kapasitas yaitu lebar kerja, kedalaman kerja, kecepatan maju, luas lahan terolah, waktu total operasi, kapasitas lapang efektif, kapasitas lapang teoritis, efisiensi lapang dan slip roda penggerak. Pengujian dilakukan pada kendali konvensional dan kendali jarak jauh pada lahan yang sama. Hasil pengujian menunjukkan bahwa traktor dengan kendali konvensional memiliki Kapasitas Lapang Efektif 0.030 ha/jam, dengan efisiensi pengolahan 61.0%, sementara dengan kendali nirkabel 0.025 ha/jam dengan efisiensi pengolahan 57.7%.
Penggunaan kendali jarak jauh pada traktor mini (menggunakan Kubota B6100) telah berhasil diujicoba dan berfungsi sesuai yang diharapkan. Nilai efisiensi lapang dengan kendali manual lebih baik dibandingkan dengan kendali jarak jauh. Untuk pengembangan, pada penelitian-penelitian selanjutnya, sistem transmisi, pengendalian tuas hidraulik three point hitch, sistem kopling dan pengereman dapat diteliti lebih lanjut sehingga dapat menghasilkan traktor yang sepenuhnya dapat dikendalikan dari jarak jauh serta perlu diteliti kembali untuk efektivitas kualitas pengolahan lahan dengan kendali jarak jauh.
PENGUJIAN KINERJA TRAKTOR MINI
DENGAN KENDALI KEMUDI NIRKABEL
SKRIPSI
Sebagai salah satu syarat untuk memperoleh gelar
SARJANA TEKNOLOGI PERTANIAN
pada Departemen Teknik Mesin dan Biosistem,
Fakultas Teknologi Pertanian,
Institut Pertanian Bogor
Oleh
SALMAN AL FARISI
F14080041
FAKULTAS TEKNOLOGI PERTANIAN
INSTITUT PERTANIAN BOGOR
BOGOR
2012
Judul Skripsi : Pengujian Kinerja Traktor Mini Dengan Kendali Nirkabel Nama : Salman Al Farisi
NIM : F14080041
Menyetujui,
Pembimbing,
(Dr. Ir. Radite Praeko Agus Setiawan, M. Agr) NIP. 19621223 198601 1 001
Mengetahui: Ketua Departemen,
(Dr. Ir. Desrial, M.Eng) NIP. 19661201 199103 1 004
PERNYATAAN MENGENAI SKRIPSI DAN
SUMBER INFORMASI
Saya menyatakan dengan sebenar-benarnya bahwa skripsi dengan judul Pengujian Kinerja Traktor Mini Dengan Kendali Nirkabel adalah hasil karya saya sendiri dengan arahan Dosen Pembimbing Akademik, dan belum diajukan dalam bentuk apapun pada perguruan tinggi manapun. Sumber informasi yang berasal atau dikutip dari karya yang diterbitkan maupun tidak diterbitkan dari penulis lain telah disebutkan dalam teks dan dicantumkan dalam Daftar Pustaka di bagian akhir skripsi ini.
Bogor, November 2012 Yang membuat pernyataan
Salman Al Farisi F14080041
© Hak Cipta milik Salman Al Farisi, tahun 2012 Hak Cipta Dilindungi
Dilarang mengutip dan memperbanyak tanpa izin tertulis dari
Institut Pertanian Bogor, sebagian atau seluruh dalam bentuk apapun, baik cetak, fotokopi, microfilm dan sebagainya
BIODATA PENULIS
Salman Al Farisi lahir di Jakarta, 05 Januari 1990 dari ayah Sudaryanto dan ibu Kiayati Yusriyah, sebagai anak pertama dari dua bersaudara. Penulis menamatkan SMA pada tahun 2008 dari SMA Negeri 39 Jakarta dan pada tahun yang sama diterima di IPB melalui jalur Undangan Seleksi Masuk IPB (USMI). Penulis memilih program studi Teknik Pertanian, Departemen Teknik Mesin dan Biosistem, Fakultas Teknologi Pertanian. Selama perkuliahan, penulis aktif sebagai anggota Himpunan Mahasiswa Teknik Pertanian, Fakultas Teknologi Pertanian pada tahun 2010-2011. Pada tahun 2011 penulis menjadi asisten mata kuliah Motor dan Tenaga Pertanian serta pada tahun 2011 dan 2012 penulis juga menjadi asisten mata kuliah Gambar Teknik.
Pada tahun 2011 penulis melakukan praktek lapangan di PT PG Rajawali II Unit PG Jatitujuh, Majalengka, Jawa Barat dengan judul “Aspek Keteknikan Pertanian Pada Operasi Alat dan Mesin Pertanian Di Pabrik Gula Jatitujuh, Majalengka”.
Sebagai salah satu syarat memperoleh gelar Sarjana Teknologi Pertanian, penulis menyelesaikan skripsi yang berjudul “Pengujian Kinerja Traktor Mini Dengan Kendali Nirkabel”.
KATA PENGANTAR
Puji dan syukur dipanjatkan ke hadapan Allah SWT atas karuniaNya sehingga penelitian ini berhasil diselesaikan. Penelitian dengan judul “Pengujian Kinerja Traktor Mini Dengan Kendali Nirkabel” telah dilaksanakan pada bulan Maret sampai September 2012.
Dengan telah selesainya penelitian ini, penulis ingin menyampaikan terima kasih yang sebesar-besarnya kepada:
1. Dr. Ir. Radite Praeko Agus Setiawan, M.Agr, selaku dosen pembimbing skripsi atas bimbingan dan saran kepada penulis selama ini.
2. Dr. Ir. Wawan Hermawan, MS dan Dr. Ir. Y. Aris Purwanto, M.Sc, selaku dosen penguji 3. Ayahanda, Sudaryanto dan Ibunda tercinta Kiayati Yusriyah, kedua orangtua yang selalu
memberikan dukungan secara moril dan materiil kepada penulis. 4. Bintarjo Agus Priyadi, sebagai rekan selama penelitian.
5. Mien R. Uno Foundation, sebagai donatur yang memberikan beasiswa kepada penulis selama kuliah di IPB.
6. Muhammad Tahir Sapsal, S.TP, M.Si, Pandu Gunawan S.TP, Cecep S. S.TP dan Khania Tria Tifani atas bantuan, saran serta masukan selama jalannya penelitian.
7. Teknisi lapangan ( Pak Wana, Pak Darma, Pak Parma, Pak Juli dan Mas Firman), terima kasih atas bantuannya selama penelitian di lapangan.
8. Aulia Rizqi, terima kasih atas dukungan dan bantuan selama ini.
9. Teman-teman kontrakan Griya Sakinah dan Keluarga besar Magenta (TEP 45), terima kasih atas bantuan selama pelaksanaan penelitian.
10. Dan semua pihak yang telah ikut membantu yang tidak dapat penulis sebutkan satu per satu.
Tiada gading yang tak retak. Penulis menyadari bahwa dalam penyusunan skripsi ini masih ada kekurangan, kritik dan saran yang membangun sangat diharapkan. Semoga skripsi ini bermanfaat bagi yang membacanya.
Bogor, November 2012
DAFTAR ISI
KATA PENGANTAR ... iii
DAFTAR ISI ... iv
DAFTAR TABEL ... v
DAFTAR GAMBAR ... vi
DAFTAR LAMPIRAN... vii
PENDAHULUAN ... 1
A. Latar Belakang ... 1
B. Tujuan ... 2
2. TINJAUAN PUSTAKA ... 3
A. Traktor pertanian... 3
B. Tiga titik gandeng ... 5
C. Bajak singkal ... 7
D. Kecelakaan kerja dengan traktor ... 7
E. Traktor dengan kendali radio control... 8
F. Sistem kendali radio control ... 9
G. Uji unjuk kerja ...10
III. METODE PENELITIAN ...12
A. Waktu dan tempat ...12
B. Alat dan bahan ...12
C. Tahapan penelitian ...13
D. Prosedur penelitian...14
IV. HASIL DAN PEMBAHASAN...23
A. Konstruksi komponen hasil modifikasi ...23
B. Uji jalan lurus dan jari-jari putar ...25
C. Uji kinerja pengolahan ...30
V. KESIMPULAN DAN SARAN...37
A. Kesimpulan ...37
B. Saran ...37
DAFTAR PUSTAKA ...38
DAFTAR TABEL
Halaman Tabel 1. Klasifikasi traktor roda empat berdasarkan besaran daya penggerak motor diesel dan kategori
tiga titik gandeng ... 4
Tabel 2. Tahanan Penetrasi pada setiap kedalaman pengukuran ... 25
Tabel 3. Kadar air pada setiap kedalaman pengukuran ... 26
Tabel 4. Jari-jari PutarSearah Jarum Jam Tanpa Rem ... 29
Tabel 5. Jari-jari PutarSearah Jarum jam dengan rem... 29
Tabel 6. Jari-jari PutarBerlawanan Jarum Jam Tanpa Rem... 29
Tabel 7. Jari-jari PutarBerlawanan Jarum Jam dengan Rem ... 29
Tabel 8. Kadar air sebelum pengolahan ... 31
Tabel 9. Kadar air setelah pengolahan ... 31
DAFTAR GAMBAR
Halaman
Gambar 1. Bagian – bagian traktor roda empat tipe Kubota B6100 ... 4
Gambar 2. Bagian tuas dan pedal pengatur traktor roda empat ... 5
Gambar 3. Three hitch point pada traktor (Srivastava 1993)... 6
Gambar 4. Kelengkapan penumpu tiga titik (Srivastava 1993) ... 6
Gambar 5. Bagian penumpu tiga titik (Srivastava 1993) ... 6
Gambar 6. Bagan kerja dari traktor radio control ... 8
Gambar 7. SPC Wireless Gamepad Interface... 9
Gambar 8. Motor listrik penggerak roda kemudi... 10
Gambar 9. Traktor Kubota B6100 ... 13
Gambar 10. Flowchart tahapan penelitian ... 14
Gambar 11. Traktor Kubota B6100 milik Fakultas Peternakan ... 14
Gambar 12. Pengukuran komponen traktor Kubota B6100 milik Bapak Abet... 15
Gambar 13. Pengambilan sampel tanah pada lahan pengujian ... 15
Gambar 14. Oven pengeringan ... 16
Gambar 15. Penetrometer tipe SR-2 ... 17
Gambar 16. Pengukuran penetrasi tanah ... 17
Gambar 17. Lahan uji lurus ... 17
Gambar 18. Pengukuran simpangan roda dari base line ... 18
Gambar 19. Penandaan uji putar... 18
Gambar 20. Pengukuran diameter putar traktor... 19
Gambar 21. Jari-jari putar dan spasi putaran traktor (SNI 7416:2010) ... 19
Gambar 22. Pengukuran lebar kerja... 20
Gambar 23. Kedalaman pembajakan (SNI 1212:2008) ... 20
Gambar 24. Pengukuran kedalaman ... 20
Gambar 25. Pengukuran kecepatan maju (SNI 1212:2008) ... 21
Gambar 26. Pengukuran slip roda (SNI 1212:2008) ... 22
Gambar 27. Kondisi penggandeng sebelum penelitian ... 23
Gambar 28. Tiga titik gandeng yang telah dimodifikasi ... 24
Gambar 29. Pipa selimut upper link ... 24
Gambar 30. Tahanan penetrasi tanah rata-rata ... 25
Gambar 31. Uji jalan lurus ... 26
Gambar 32. Grafik hasil uji jalan lurus kendali manual ... 27
Gambar 33. Grafik hasil uji jalan lurus kendali jarak jauh ... 28
Gambar 34. Tahanan penetrasi rata-rata sebelum dan sesudah uji kinerja ... 30
Gambar 35. Grafik hasil pengujian lebar kerja kendali manual (1) ... 32
Gambar 36. Grafik hasil pengujian lebar kerja kendali manual (2) ... 32
Gambar 37. Grafik hasil pengujian lebar kerja kendali jarak jauh (1) ... 33
Gambar 38. Grafik hasil pengujian lebar kerja kendali jarak jauh (2) ... 33
Gambar 39. Grafik hasil kedalaman pengolahan kendali manual ... 34
Gambar 40. Grafik hasil kedalaman pengolahan kendali jarak jauh ... 34
DAFTAR LAMPIRAN
Halaman
Lampiran 1. Spesifikasi traktor pengujian ... 40
Lampiran 2. Cara pengukuran dan perhitungan kadar air ... 41
Lampiran 3. Pengukuran kadar air uji belok ... 42
Lampiran 4. Pengukuran penetrasi tanah uji belok ... 43
Lampiran 5. Pengukuran jari-jari putar ... 45
Lampiran 6. Uji jalan lurus ... 49
Lampiran 7. Perhitungan kadar air pengolahan tanah ... 52
Lampiran 8. Perhitungan penetrasi tanah pengolahan tanah ... 53
Lampiran 9. Pengukuran lebar pengolahan tanah ... 55
Lampiran 10. Pengukuran kedalaman pengolahan tanah ... 56
I. PENDAHULUAN
A.
Latar Belakang
Banyak faktor telah berkontribusi dalam mekanisasi pertanian. Beberapa faktor tersebut antara lain untuk mengurangi kelelahan kerja manusia, peningkatan produktivitas dan mengurangi kebutuhan pekerja dalam jumlah banyak. Mekanisasi telah diterapkan secara luas, mulai dari kegiatan pra panen hingga pasca panen (Srivastava 1993). Traktor pertanian telah membantu manusia untuk pekerjaan di lahan yang membutuhkan banyak tenaga seperti pengolahan tanah, karena memang pekerjaan pengolahan tanah adalah pekerjaan pertanian yang relatif membutuhkan daya yang besar dibanding pekerjaan lainnya. Selain itu traktor juga digunakan untuk penanaman, untuk pemeliharan tanaman, untuk memutar pompa irigasi, untuk memanen tanaman, serta untuk pengangkutan, mulai dari bibit, pupuk, peralatan, sampai hasil pertanian.
Selama ini penggunaan kendali jarak jauh pada peralatan dan mesin pertanian masih belum diterapkan secara luas di Indonesia. Di sulawesi kendali jarak jauh sudah diterapkan pada CV Chandue Tanindo pada pemanen padi tipe sisir, yang merupakan modifikasi pemanen tipe sisir hasil penelitian IRRI (International Rice Research Institute). Menurut Wardhana, perkembangan dunia nirkabel semakin dibutuhkan dan otomatisasi dapat membantu meringankan pekerjaan manusia sehingga menjadi lebih mudah dan ringan.
Dalam implemenasi di lapangan, operasi alat dan mesin pertanian seringkali dalam kondisi lingkungan yang tidak baik untuk operator, seperti kondisi cuaca yang ekstrim, lingkungan yang tidak sehat hingga berbahaya bagi operator. Unmanned vehicle atau yang lebih dikenal dengan kendaraan tanpa awak sudah diterapkan secara luas pada bidang militer untuk melakukan pekerjaan-pekerjaan yang berbahaya jika dilakukan secara konvensional dengan operator di lapangan, namun pada bidang pertanian implemenasi ini masih terbatas. Penerapan robotika pada pertanian sudah diterapkan dengan artificial intelligence (AI), namun terbatas pada pengolahan komoditas pertanian pasca panen.
Pengembangan unmanned vehicle dalam bidang pertanian, terutama traktor pertanian, dirasakan sangat perlu. Peran manusia tetap diperlukan untuk pengendalian kemudi, karena dalam beberapa hal, traktor robot tidak dapat mengambil keputusan yang tepat dalam menghadapi permasalahan di lapangan. Untuk menjawab permasalahan itu, diperlukan alat dan mesin pertanian yang dapat dikendalikan dari jarak jauh sehingga kegiatan pertanian menggunakan mesin akan lebih aman, nyaman dan mengurangi kelelahan fisik pada penggunanya.
Penggunaan alat kendali nirkabel untuk traktor mini, menggunakan frekuensi radio 433Mhz seperti spesifikasi SPC Wireless Gamepad Interface perlu diuji lebih lanjut, karena pada frekuensi ini banyak peralatan sehari-hari digunakan. Interferensi dapat terjadi apabila terdapat pemakaian alat-alat pada frekuensi serupa seperti wireless remote starter pada mobil, sistem keamanan wireless, transmisi peralatan cuaca (weather station) dan peralatan lainnya pada frekuensi yang sama.
Penerapan kendali jarak jauh pada traktor pertanian perlu dipelajari lebih lanjut, sehingga dapat dibandingkan kelebihan dan kekurangan antara kendali jarak jauh dan konvensional dengan menggunakan roda kemudi. Penggunaan kendali jarak jauh pada penelitian yang akan dilakukan hanya fokus pada sistem kendali saja dan untuk pekerjaan pembajakan. Kinerja yang akan diuji dalam penelitian ini adalah perbandingan kestabilan arah gerak traktor, besarnya jari-jari putar dan kapasitas serta efisiensi pengolahan antara
kendali konvensional dengan operator berada di traktor dan kendali nirkabel melalui alat pengendali jarak jauh (remote controller). Untuk pengembangan, pada penelitian-penelitian selanjutnya, sistem transmisi dan lain-lain dapat diteliti lebih lanjut sehingga dapat menghasilkan traktor yang sepenuhnya dapat dikendalikan dari jarak jauh.
B.
Tujuan
Penelitian ini bertujuan untuk menguji kinerja traktor mini (Kubota B6100) dengan sistem kendali secara nirkabel menggunakan remote control SPC Wireless Gamepad Interface pada pekerjaan pembajakan.
II. TINJAUAN PUSTAKA
A.
Traktor Pertanian
Traktor adalah suatu mesin traksi yang utamanya dirancang dan dinyatakan sebagai penyedia tenaga bagi peralatan pertanian dan perlengkapan usaha tani (Sembiring 1998). Traktor roda empat merupakan mesin berdaya gerak sendiri berupa motor diesel, beroda empat (ban karet atau ditambah roda sangkar dari baja) yang mempunyai tiga titik gandeng, berfungsi untuk menarik, menggerakkan, mengangkat, mendorong alat dan mesin pertanian dan juga sebagai sumber daya penggerak (SNI 7416:2010).
Traktor pertanian lebih merupakan sebagai sumber daya utama dalam bidang pertanian di negara–negara yang telah maju. Di Indonesia dimana daya manusia dan hewan masih merupakan sumber daya utama pada pertanian rakyat di pedesaan traktor pertanian telah diintroduksikan pula, sedangkan pada perusahaan–perusahaan pertanian, traktor–traktor pertanian telah menjadi sumber daya utama (Muliono 1978).
Traktor roda ban dengan roda satu atau dua umumnya dikenal sebagai traktor tangan untuk pertanian pada lahan sempit atau pada luasan lahan yang tidak begitu luas. sedangkan traktor beroda tiga digunakan untuk kegiatan antar barisan tanaman terutama dalam kegiatan pemeliharan tanaman. Traktor beroda empat atau lebih umumnya mempunyai motor penggerak yang lebih besar dan sering digunakan untuk penyiapan pada lahan pertanian. Traktor tersebut dapat dengan penggerak 2WD atau 4WD sebagai traksi yang sangat besar untuk traktor tersebut (Sitompul 1991).
Ketika traktor pertama kali digunakan untuk pengoperasian peralatan lapangan, semua mesin ditarik dibelakang traktor. Dengan dikembangkannya penyadap daya, mesin-mesin lain seperti misalnya pembabat dan pemetik jagung, dipasang dan dimuat pada traktor. Unit peralatan pertama yang dipasang pada traktor membutuhkan tenaga yang cukup banyak pada waktu memasang dan membongkar.
Peralatan usaha tani sebelum abat ke 19 ditarik oleh hewan, di bimbing dengan tangan dan diangkat secara manual. Kemudian, ketika peralatan dipasang diatas roda, untuk menaikkan dan menurunkan unit-unit kerjanya digunakan tuas. Alat pengangkat dengan tenaga mesin traktor dikembangkan pada tahun 1930 untuk menaikkan dan menurunkan mesin tanam dan mesin pendangir yang dipasang pada traktor untuk tanaman yang berbaris (Smith 1990).
Mesin dan alat pertanian dapat dikelompokkan berdasarkan jenis pekerjaan yang dilakukannya, antara lain: alat pengolahan tanah (bajak atau garu), alat penanam, alat pemupuk, mesin pengabut atau penyemprot, alat penyiang, mesin pemanen dan alat pengangkut. Sumber tenaga penggeraknya dapat dari tenaga manusia, hewan atau mesin (Suastawa 2001).
A.1. Klasifikasi Traktor Pertanian Roda Empat
Menurut SNI 7416:2010, berdasarkan besaran daya sumber penggerak motor diesel dan kategori tiga titik gandeng, traktor roda empat diklasifikasikan kedalam 4 kelas, seperti yang disajikan pada tabel dibawah ini:
(http://bos.fkip.uns.ac.id/pub/ono/pendidikan/materi-kejuruan/pertanian/budi-daya-tanaman/mengoperasikan_traktor_roda_4.pdf)
Tabel 1. Klasifikasi traktor roda empat berdasarkan besaran daya penggerak motor diesel dan kategori tiga titik gandeng
Klasifikasi traktor Daya motor (kW) Kategori tiga titik gandeng
Traktor mini 9 – 15 1
Traktor kecil 15 – 35 1
Traktor sedang 30 – 75 2
Traktor besar 60 – 168 2 dan 3
Traktor sangat besar 135 – 300 3dan 4
Sedangkan berdasarkan jumlah poros penggerak roda, traktor roda empat dapat diklasifikasikan kedalam dua jenis yaitu:
a) Traktor dengan poros penggerak tunggal (two wheel drive, 2WD); yaitu traktor yang digerakkan oleh kedua roda belakang.
b) Traktor dengan poros penggerak ganda (four wheel drive, 4WD); yaitu traktor yang digerakkan oleh keempat roda.
A.2. Konstruksi Utama Traktor Roda Empat
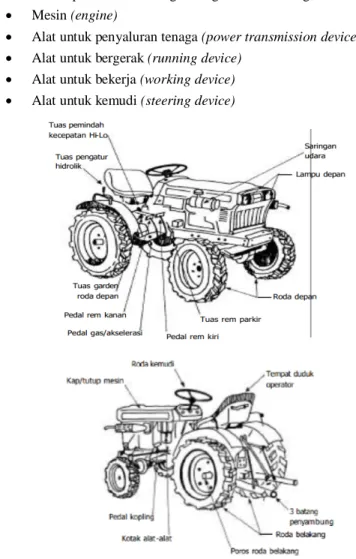
Traktor roda empat terdiri dari bagian-bagian utama sebagai berikut: Mesin (engine)
Alat untuk penyaluran tenaga (power transmission device) Alat untuk bergerak (running device)
Alat untuk bekerja (working device) Alat untuk kemudi (steering device)
(http://bos.fkip.uns.ac.id/pub/ono/pendidikan/materi-kejuruan/pertanian/budi-daya-tanaman/mengoperasikan_traktor_roda_4.pdf)
A.3. Pengendali Manual Traktor Roda Empat
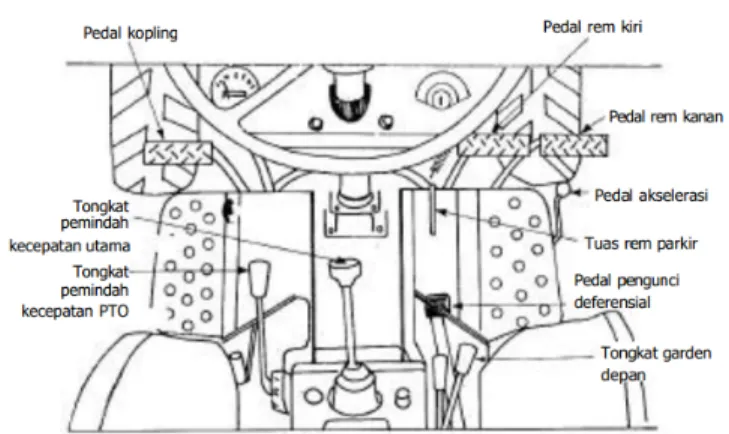
Gambar 2. Bagian tuas dan pedal pengatur traktor roda empat
a. Roda kemudi berfungsi untuk mengubah arah gerak traktor melalui putaran roda depan. b. Tuas akselerasi (pengatur gas) berfungsi untuk menjaga agar kecepatan jalan traktor
tetap konstan pada saat dioperasikan.
c. Tuas hidrolik berfungsi untuk menggerakkan lengan pengangkat implemen.
d. Tuas perseneleng utama berfungsi untuk mengatur kecepatan maju dan kecepatan mundur traktor, biasanya tuas perseneleng terdiri dari 3 atau 4 kecepatan maju dan satu kecepatan mundur.
e. Tuas perseneleng cepat/lambat digunakan untuk membedakan kecepatan di lahan (pada saat mengolah tanah) dan kecepatan ketika di jalan. Dengan tuas perseneleng cepat/lambat, kombinasi kecepatan menjadi 6 atau 8 maju dan 2 mundur.
f. Tuas perseneleng PTO berfungsi untuk mengubah kecepatan putar poros PTO yang diinginkan. Setiap jenis traktor memiliki jumlah kecepatan yang berbeda-beda.
g. Tuas gardan depan berfungsi untuk menyambung garden depan apabila diperlukan. Garden depan digunakan untuk memperbesar daya tarik traktor.
h. Pedal kopling berfungsi untuk menghubungkan dan melepaskan hubungan antara motor penggerak dengan transmisi.
i. Pedal rem (kanan dan kiri) berfungsi untuk membantu traktor berbelok secara tajam, baik ke kanan maupun ke kiri.
j. Pedal gas berfungsi untuk mempercepat dan memperlambat putaran motor penggerak. Apabila pedal gas ditekan maka putaran motor penggerak akan semakin cepat dan sebaliknya.
k. Tuas rem parkir berfungsi untuk menahan rem tetap pada posisi mengerem.
l. Pedal pengunci differensial (gardan) berfungsi untuk menyamakan putaran kedua roda belakang.
B.
Tiga Titik Gandeng
Traktor pada masa lalu hanya memiliki satu titik gandeng, yaitu drawbar hitch, yang hanya dapat menarik implemen saja tanpa dapat mengangkutnya untuk transportasi. Tiga titik gandeng, atau yang lebih dikenal dengan nama three point hitch, telah menjadi standar pada kebanyakan traktor. Three point hitch terdiri dari upper link point, upper link,
lower link point dan lower link. Dimensi pada hitch point telah distandarisasi oleh ASAE (American Society of Agriculture Engineers) sejak tahun 1959. Traktor pada gambar 1 telah dilengkapi dengan three point hitch dan sebuah drawbar. Terminologi pada three point hitch disajikan pada Gambar 4 (Srivastava 1993).
Sebuah single-acting hydraulic cylinder digunakan untuk menaikkan dan menurunkan implemen yang dipasang. Dua buah lower link, kiri dan kanan, mampu bergerak naik yang dioperasikan oleh tekanan hidrolik, dan bergerak turun oleh gaya gravitasi implemen. Pengaturan ketinggian implemen dilakukan oleh operator melalui alat tuas implemen dari kursi duduk operator. Dalam pengolahan tanah, implemen pengolahan tanah umumnya diangkat pada saat traktor berbelok (Srivastava 1993).
Gambar 3. Three point hitch pada traktor (Srivastava 1993)
Gambar 4. Kelengkapan penumpu tiga titik (Srivastava 1993)
C.
Bajak Singkal
Bajak merupakan alat pertanian yang paling tua, telah dipergunakan sejak 6000th SM di Mesir. Pada awal mulanya bajak sepenuhnya ditarik oleh hewan seperti kerbau, kuda dan sapi. Banyak dijumpai berbagai bentuk rancangan bajak, hal ini pada umumnya dimaksudkan untuk dapat memperoleh penyesuaian antara tujuan pengolahan tanah dan peralatan yang dipergunakan.
Keppner dalam Tasliman menyatakan bajak singkal merupakan salah satu di antara alat pertanian tertua dan umumnya dianggap sebagai alat yang paling penting. Pembajakan menyerap tenaga traksi lebih besar dibanding semua pengerjaan lapangan lainnya. Meskipun pengkajian terhadap hasil panen telah memberi petunjuk bahwa pada keadaan tertentu pada beberapa tanaman budidaya tertentu tidak terlihat adanya keuntungan dari dilakukannya pembajakan. Bajak singkal sejauh ini masih merupakan alat yang paling banyak digunakan untuk olah tanah pertama pada penyiapan persemaian.
SNI 7416:2010 tentang “Unjuk kerja dan cara uji traktor pertanian roda empat” menyatakan bahwa bajak singkal merupakan alat pengolah tanah pertama (pembajakan) berbentuk singkal yang digandengkan pada tiga titik gandeng dibelakang traktor dan berfungsi untuk memotong, mengangkat, membalikkan dan memecah bongkahan tanah hasil pembajakan dimana sudut bajak menentukan kedalaman, sedangkan jumlah mata bajak dan lebar mata bajak menentukan lebar pembajakan.
Berdasarkan bentuk dan kegunaannya, secara garis besar bajak dibedakan atas beberapa jenis, yaitu bajak singkal (mold board plow), bajak piringan (disk plow), bajak rotari atau bajak putar (rotary plow), bajak pahat (chisel plow), dan bajak tanah bawah (sub soil plow). Bajak singkal termasuk jenis bajak yang paling tua. Di Indonesia jenis bajak singkal inilah yang paling umum digunakan oleh petani untuk melakukan pengolahan tanah mereka, dengan menggunakan tenaga ternak sapi atau kerbau, sebagai sumber daya penariknya. Saat ini penggunaan traktor untuk menarik bajak singkal mulai dikenal luas di Indonesia. Bajak singkal secara umum dapat dibedakan menjadi dua golongan yaitu:
1. Bajak singkal satu arah (one way moldboard plow), adalah jenis bajak singkal dimana pada waktu mengerjakan pengolahan tanah akan melempar dan membalik tanah hanya dalam satu arah. Lemparan atau pembalikan tanahnya biasanya dilakukan ke arah kanan
2. Bajak singkal dua arah ( two way / reversible moldboard plow), adalah jenis bajak singkal dimana pada waktu mengerjakan pengolahan tanah, arah pelemparan atau pembalikan tanahnya dapat diatur dua arah yaitu ke kiri maupun ke arah kanan. Jenis bajak ini mempunyai mata bajak yang kedudukannya dirancang untuk dapat diputar ke kanan ataupun ke kiri dengan cepat, sesuai dengan arah pelemparan ataupun pembalikan tanah yang dikehendaki.
D. Kecelakaan Kerja dengan Traktor
Miller dan Fragar menyebutkan bahwa faktor lingkungan, dalam hal ini kemiringan lahan merupakan faktor kedua dari banyak kecelakaan yang terjadi di lahan. Traktor yang sedang bergerak mengalami kerusakan pada rem tangan atau kegagalan operator dalam menggunakan rem tangan.
Pada beberapa kasus operator terjatuh bahkan terlempar dari traktor dikarenakan lahan yang berbatu atau menabrak sesuatu menjadi faktor terjadinya kecelakaan. Faktor
(http://lamar.colostate.edu/~jhliu/radio_control_tractor.html)
lingkungan pada umumnya menjadi bagian normal dari aktivitas di lahan pertanian, hanya sedikit yang dapat dikurangi untuk meminimalisir terjadinya kecelakaan. Hal yang penting dalam pengurangan bahaya pada aktivitas pertanian dapat berupa metode untuk menghindari bahaya akibat faktor lingkungan seperti menerapkan good work practices atau meningkatkan implemenasi teknologi pada traktor.
Beberapa sumber tentang terjatuhnya operator dari traktor menyebutkan bahwa operator berdiri pada operator platform untuk menghilangkan pegal-pegal pada punggung, atau bahkan pada satu kasus berdiri di platform untuk mengurangi ketidaknyamanan duduk di kursi.
E. Traktor dengan Kendali Radio Control
Menurut Stentz et al. (2002), traktor digunakan dalam berbagai macam kegiatan di bidang pertanian. Bila dilengkapi dengan implemen yang tepat, traktor dapat membajak, menyiang, memupuk, menyemprot, menarik beban, memotong hingga memanen. Fungsi yang banyak dari traktor membuat traktor menjadi target utama otomasi. Otomasi dapat meningkatkan produktivitas dengan peningkatkan kecepatan kerja mesin rata-rata di lahan, meningkatkan keamanan dengan memisahkan operator manusia dengan mesin dan meminimalisir risiko kecelakaan, dan menurunkan biaya operasional dengan mengurangi pekerja dan perawatan bagi setiap mesin.
Menurut Oksanen, kendaraan masa depan di bidang pertanian akan tidak membutuhkan awak lagi, operator cukup hadir dengan duduk pada kendaraan lain di dekatnya atau bahkan mengendalikan dari ujung lahan.
Menurut Liu, traktor dengan kendali remote control adalah traktor yang operasinya dikendalikan atau dioperasikan melalui sebuah sistem kendali jarak jauh. Untuk itu, sebuah sistem radio control digunakan untuk mengendalikan operasi-operasi penting pada traktor secara jarak jauh. Operator dari sebuah traktor radio control dapat mengendalikan secara virtual dengan mengatur tuas dan tombol kendali pada radio transmitter.
(http://www.mikron123.com/components/com_virtuemart/shop_image/product/c73 89c6735848123bc651209a3d9017c.jpg)
Pada traktor terdapat beberapa receiver dengan channel berbeda yang tersambung dengan servo. Servo ini akan menekan satu atau dua tuas kendali dengan memutar lengan servo. Tuas yang dikendalikan akan menyalakan atau mematikan arus listrik dari actuator, yang akan menentukan operasi dari traktor.
Ketika seorang operator menaikkan atau menekan tombol pada transmitter, receiver akan menerima sinyal dari transmitter dan akan meneruskannya pada servo yang sesuai. Putaran lengan servo akan menimbulkan arus listrik untuk menggerakkan actuator atau DC gearmotor, yang akan menggerakkan bagian tertentu dari traktor, seperti sumbu kendali, pedal rem, pedal kopling, motor starter dan tuas bahan bakar.
Untuk sebuah traktor dengan radio control, beberapa komponen penting pada traktor perlu dimodifikasi dan dirancang ulang sehingga dapat dikendalikan menggunakan sistem radio control, namun beberapa bagian seperti gear dan tuas akselerasi tetap dikendalikan secara manual.
F. Sistem Kendali Radio Control
Sebuah set radio control digunakan untuk mentransfer sinyal radio dari transmitter menuju tuas elektrik. Termasuk di dalamnya adalah transmitter dan conventional control box. Seorang operator biasanya memegang transmitter, sementara conventional controlbox dipasang pada traktor.
Salah satu transmitter adalah Smart Peripheral Controller / SPC Wireless Gamepad Interface. SPC Wireless Gamepad Interface adalah sebuah media penghubung antara manusia dengan berbagai macam peralatan elektronika yang akan dikontrol secara nirkabel. Modul ini cocok untuk mengendalikan berbagai macam peralatan elektronika yang memerlukan banyak aksi kontrol, baik kontrol analog maupun kontrol digital. Contoh aplikasinya adalah robot mobil, robot lengan, mainan remote control, kamera pengintai, dan lain-lain. Sistem ini terdiri dari sebuah gamepad yang biasa digunakan pada console PlayStation®, sebuah modul berbasis mikrokontroler (modul TX) yang digunakan untuk membaca data-data penekanan pada tombol-tombol digital dan joystick analog di gamepad dan memancarkan data-data tersebut pada Radio Frequency (RF), serta sebuah modul berbasis mikrokontroler (modul RX) yang digunakan untuk menerima data-data yang dipancarkan tersebut dan menerjemahkannya menjadi sinyal-sinyal digital dan Pulse Width Modulation (PWM).
Frekuensi 433MHz digunakan karena membutuhkan tenaga yang kecil dan tidak membutuhkan lisensi pada ISM (Industrial, Scientific and Medical) bagian dari pita frekuensi UHF (Ultra High Frequency). Frekuensi 433 MHz juga merupakan frekuensi yang memiliki performa paling baik pada lingkungan yang ramai seperti perkantoran, sentra data dan rumah sakit karena frekuensi rendah dapat mengurangi efek terjadinya pemantulan dan pembiasan. Spesifikasi SPC Wireless Gamepad Interface sebagai berikut:
Daya bisa diperoleh dari baterai 4,8 – 5,4 Volt atau sumber catu daya lain dengan tegangan 9 – 12 V.
Bekerja pada pita frekuensi 433 Mhz. Jari-jari jangkauan maksimum 100 meter. Tersedia 60 kanal komunikasi.
Autoscanning kanal komunikasi yang kosong (secara bergantian).
Tersedia antarmuka UART untuk mengirimkan data tambahan secara wireless.
Pin Input/Output kompatibel dengan level tegangan TTL dan CMOS. Kompatibel dengan modul-modul EMS H-Bridge.
Terdapat 2 set output PWM dengan frekuensi 300 Hz.
Kompatibel dengan gamepad DUALSHOCK® 2 untuk PlayStation® 2.
Mendukung 12 tombol aksi, 4 tombol arah, dan 2 joystick analog pada gamepad.
Mendukung mode getar pada gamepad
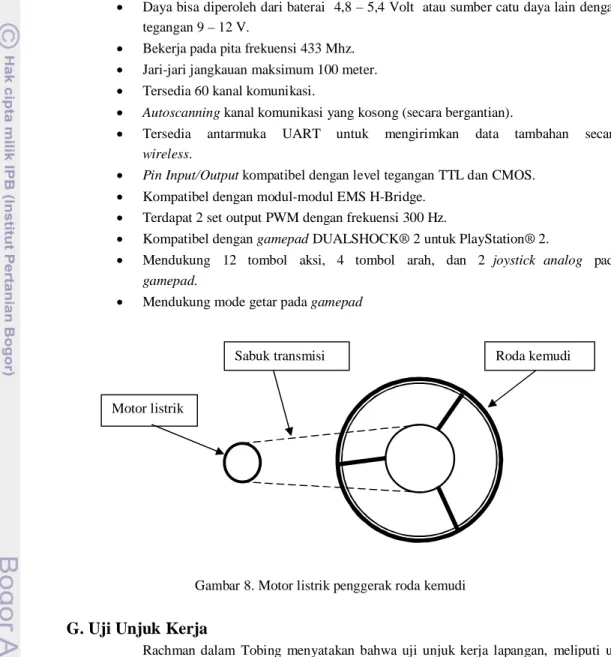
Gambar 8. Motor listrik penggerak roda kemudi
G. Uji Unjuk Kerja
Rachman dalam Tobing menyatakan bahwa uji unjuk kerja lapangan, meliputi uji lapangan pengolahan tanah di lahan kering dan lahan sawah dengan implemen pendukung untuk mengukur kapasitas kerja, kedalaman pembajakan, lebar kerja pembajakan, kecepatan kerja pembajakan, kecepatan kerja penggaruan, lebar kerja penggaruan, slip roda, efisiensi lapang sampai lahan yang dikerjakan siap untuk ditanami. Berdasarkan SNI 02-3155-1992 pengukuran lingkaran putar dan spasi putaran juga dilakukan pada traktor pertanian bergandar ganda. Beberapa istilah dalam uji unjuk kerja antara lain:
Motor listrik
Roda kemudi Sabuk transmisi
G.1. Kapasitas Lapangan
McKibben dalam Srivastava (1993) menyatakan bahwa kapasitas lapangan adalah jumlah yang dapat dikerjakan oleh sebuah mesin per satuan jam. Kapasitas lapangan dapat dibedakan dalam satuan bahan dan luas. Kapasitas lapangan dibedakan menjadi dua, yaitu kapasitas lapangan efektif (KLE) dan kapasitas lapangan teoritis (KLT). Kapasitas lapangan efektif diukur berdasarkan luas hasil kerja dibagi dengan waktu yang dibutuhkan di lapangan. Kapasitas lapangan teoritis merupakan hasil pengkalian antara nilai kecepatan traktor tanpa slip dengan lebar kerja implemen (SNI 7416:2010)
G.2. Kapasitas Lapangan Teoritis
Kapasitas lapangan teoritis (KLT) merupakan hasil pengkalian antara nilai kecepatan traktor tanpa slip dengan lebar kerja implemen
G.3. Kapasitas Lapangan Efektif
Kapasitas lapangan efektif (KLE) merupakan kapasitas lapangan yang diukur berdasarkan luas hasil kerja dibagi dengan waktu yang dibutuhkan di lapangan.
G.4. Efisiensi Lapangan
Efisiensi lapangan adalah perbandingan antara KLE dan KLT yang dinyatakan dalam persen yang merupakan unjuk kerja suatu traktor.
G.5. Kecepatan Kerja
Kecepatan kerja (working speed) merupakan jarak yang ditempuh traktor per satuan waktu pada saat operasi di lapangan.
G.6. Jari-jari Putar
Jari-jari putar (turning radius) merupakan jari-jari lingkaran terkecil roda terluar traktor tegak lurus dari putaran traktor.
G.7. Spasi Putaran
Spasi putaran (turning space) merupakan diameter lingkaran terkecil dari putaran traktor yang diukur dari pusat lingkaran ke bagian terluar traktor
III. METODE PENELITIAN
A.
Waktu dan Tempat
Penelitian dilaksanakan pada bulan April hingga bulan September 2012 di Laboratorium Lapang Siswadhi Soepardjo, Departemen Teknik Mesin dan Biosistem, Fakultas Teknologi Pertanian, Institut Pertanian Bogor.
B.
Alat dan Bahan
Alat-alat yang digunakan dalam penelitian ini meliputi : a. Traktor Kubota B6100 b. Bajak singkal c. Pita ukur d. Mistar ukur e. Patok bambu f. Stopwatch g. Alat tulis h. Laptop
i. Las listrik dan Asetilin j. Gerinda tangan k. Bor duduk l. Kunci pas m. Kunci ring n. Tang o. Timbangan p. Tachometer
Bahan-bahan yang dipergunakan pada penelitian terdiri dari: a. Accu 12 Volt
b. Kertas
c. Lower link dan upper link pengganti
d. Rangkaian Microcontroller AVR ATMega 8535 e. SPC Gamepad Interface
f. Plat besi tebal 8mm g. Mur, baut dan ring
Gambar 9. Traktor Kubota B6100
C.
Tahapan Penelitian
C.1. Studi Pustaka dan Inventarisasi Peralatan
Studi pustaka dilakukan guna mengumpulkan informasi yang berhubungan dengan penelitian-penelitian yang berhubungan dengan traktor Kubota B6100 sebelum penelitian ini dilakukan. Modul-modul SNI dari Badan Standarisasi Nasional dan referensi lain yang terkait dikumpulkan untuk menentukan data-data yang akan diambil pada pengujian lapangan. Setelah itu dilakukan inventarisari peralatan yang digunakan dalam penelitian, mulai dari peralatan pembuatan hingga pengujian.
C.2. Identifikasi Komponen Three Point Hitch
Identifikasi three point hitch yang rusak dan menentukan komponen-komponen pada sistem three point hitch yang perlu dibuat sehingga dapat menggunakan implemen bajak singkal dalam pengujian lapangan.
C.3. Pengukuran Komponen Three Point Hitch, Pembuatan dan Uji Fungsional
Pengukuran dimensi dan bentuk dilakukan pada three point hitch traktor Kubota B6100 yang sama pada traktor milik orang lain. Hal ini meliputi pengukuran dimensi dan penentuan jenis bahan dan yang akan memudahkan pada penggambaran menggunakan software CAD. Penggambaran menggunakan software CAD dilakukan untuk membantu visualisasi model lower link dan upper link sehingga memudahkan proses pembuatan di bengkel produksi. Setelah proses pembuatan selesai, three point hitch hasil modifikasi diujicoba fungsionalnya terlebih dahulu sebelum pengujian lapangan.
C.4. Uji Lapangan dengan Kendali Konvensional
Pengujian unjuk kerja dengan kendali roda kemudi dengan menggunakan implemen bajak singkal pada lahan ujicoba.
C.5. Uji Lapangan dengan Kendali Nirkabel
Pengujian unjuk kerja dengan kendali nirkabel dengan menggunakan implemen bajak singkal pada lahan ujicoba.
Gambar 10. Flowchart tahapan penelitian
D.
Prosedur Penelitian
D.1. Modifikasi Tiga Titik Gandeng
Modifikasi tiga titik gandeng dilakukan pada upper link dan lower link traktor Kubota B6100. Modifikasi dilakukan karena upper link dan lower link sudah tidak tersedia dan dibutuhkan untuk menggandeng implemen bajak singkal yang digunakan dalam pengujian lapangan.
Untuk memperoleh gambaran mengenai komponen three point hitch pada traktor, studi pustaka baik melalui penelusuran buku dan media internet dilakukan. Untuk memperoleh gambaran lebih baik mengenai komponen three point hitch secara langsung, dilakukan pengamatan langsung pada traktor sebanyak dua kali yaitu, (1) di Laboratorium Lapangan Fakultas Peternakan Jonggol, Jawa Barat dan (2) pada traktor milik pribadi dari Bapak Abet di Cibubur, Depok.
Gambar 11. Traktor Kubota B6100 milik Fakultas Peternakan Studi Pustaka
Identifikasi komponen three point hitch
Pengukuran komponen three point hitch dan pembuatan di
bengkel
Uji lapangan dengan kendali radio control Uji lapangan dengan kendali konvensional
Gambar 12. Pengukuran komponen traktor Kubota B6100 milik Bapak Abet
D.2. Persiapan dan Pengamatan Kondisi Lintasan
Sebelum pengujian di lahan dilakukan, ada beberapa hal yang perlu dipersiapkan, yaitu persiapan traktor Kubota B6100 dan sistem pengendali jarak jauh, persiapan instrumen pengukur, serta persiapan lahan pengujian
Persiapan pada traktor uji yaitu dengan memeriksa kondisinya sehingga pada saat pengujian tidak terjadi kesalahan dan kendala baik teknis maupun non-teknis. Pemeriksaan yang dilakukan adalah pengecekan oli, air radiator, transmisi, bahan bakar, sistem tiga titik gandeng dll. Selain itu dilakukan pengecekan terhadap perangkat sistem kendali jarak jauh, berupa pengecekan jarak pengendalian, pengecekan sensor, kestabilan putaran motor DC dll. Persiapan kelengkapan instrumen pengukur seperti penetrometer, meteran gulung dan alat ukur lainnya dilakukan sebelum pengujian. Sebelum pengujian juga dilakukan persiapan lahan uji. Lahan diberikan perlakuan bajak dan rotary dua bulan sebelumnya untuk mendapatkan lahan yang rata dan bersih dari tanaman. Kondisi fisik tanah diamati dengan mengukur kadar air dan tahanan penetrasi. Pengukuran kadar air dan dilakukan dengan mengambil sampel tanah secara tersebar pada lahan pengujian seperti Gambar 13.
Gambar 13. Pengambilan sampel tanah pada lahan pengujian
Sebelum dilakukan pengujian pada lahan, kondisi lahan diamati pada titik-titik pengukuran dengan parameter yang diamati adalah:
a. Kadar air
Kadar air merupakan jumlah air yang tersedia dalam pori tanah dalam massa tertentu. Kadar air tanah diukur dengan mengambil sampel tanah pada lahan pengujian
dengan ring sampel, kemudian ditimbang (massa tanah basah + ring sampel). Contoh tanah dikeringkan dalam oven (Gambar 14) selama 24 jam dengan suhu 110oC kemudian ditimbang (massa tanah kering + ring sampel).
Kadar air tanah dihitung (Setiawan et al. (2002) diacu dalam Anami (2008)) dengan rumus:
=
× 100
. . . (1)Keterangan : KA = kadar air basis kering (%) mtb = massa tanah basah (g) mtk = massa tanah kering (g)
Untuk perhitungan kadar air selengkapnya dapat dilihat pada Lampiran 3.
Gambar 14. Oven pengeringan
b. Penetrasi tanah
Pengukuran tahanan penetrasi dilakukan hingga kedalaman yang dianggap mewakili kedalaman pengolahan oleh bajak, yaitu pada kedalaman 5 cm sampai 20 cm. Pengukuran penetrasi tanah dilakukan dengan menggunakan penetrometer tipe SR-2 (Gambar 15) dengan kerucut berpenampang 2 cm2. Pengukuran dilakukan pada 10 titik berbeda dengan kedalaman masing-masing 5, 10, 15 dan 20 cm dari permukaan tanah. Tahanan penetrasi dihitung dengan rumus (Setiawan et al. (2002) diacu dalam Anami (2008)) berikut:
Tp t = ...……...………(2)
Dimana:
Tpt = Tahanan penetrasi tanah (kPa)
Fp = Gaya penetrasi terukur pada penetrometer ditambah dengan berat penetrometer (kgf)
Gambar 16. Pengukuran penetrasi tanah
D.3. Uji Jalan Lurus dan Uji Jari-jari Putar
Uji jalan lurus bertujuan untuk menentukan kestabilan gerak traktor dengan mengikuti satu base line di lahan. Operator mengendalikan arah laju traktor dengan memposisikan traktor di tengah base line, baik dengan setir kemudi secara konvensional dan motor DC dengan metode radio control melalui transmitter. Uji ini dilakukan dengan menentukan panjang lintasan tertentu di lapangan dan melihat besarnya simpangan yang terjadi pada jarak yang ditempuh.
Gambar 17. Lahan uji lurus Gambar 15. Penetrometer tipe SR-2
Gambar 18. Pengukuran simpangan roda dari base line
Lintasan sepanjang 20 meter disiapkan pada lahan dan setiap 2 meter ditandai untuk pemasangan patok yang bertujuan mengukur simpangan roda belakang traktor dari pusat sumbu lintasan. Posisi traktor sebelum mulai pengujian adalah di tengah-tengah sumbu lintasan uji, sehingga dapat diketahui simpangan roda pada setiap 2 meter. Pengujian dilakukan dengan (1) kendali manual dengan operator mengendalikan roda kemudi dan (2) kendali jarak jauh dengan operator mengendalikan remote controller. Cara pengujian yang dilakukan pada uji lurus yaitu dengan memasang tanda berupa bendera kecil yang ditancapkan pada jejak terluar dari traktor.
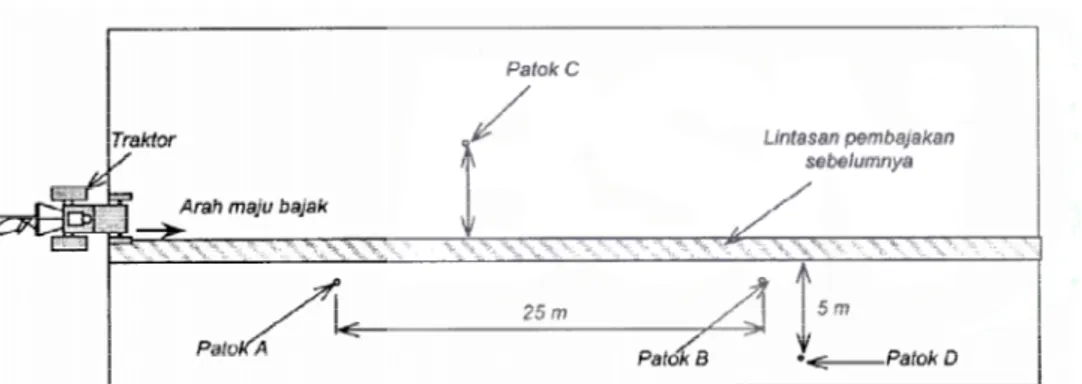
Uji jari-jari putar bertujuan untuk membandingkan jari-jari putar antara kendali traktor secara konvensional menggunakan roda kemudi dengan kendali jarak jauh menggunakan SPC wireless controller. Pengujian dilakukan pada kondisi traktor dan lahan yang sama, tanpa menggunakan implemen. Adapun prosedur pengujian yang akan dilakukan antara lain:
a. Jarak masing-masing ban dari pusat sumbu adalah sama b. Pengujian dilakukan dalam kecepatan kerja 1.5-2.0 km/jam
c. Perlakuan pada pengujian yaitu (1) kendali konvensional dan (2) kendali nirkabel d. Pengujian dilakukan dengan memutar kendali setajam mungkin tanpa menggunakan rem
sampai membuat putaran 360o, kearah kanan dan kiri. Diameter putar minimum kemudian dicatat sebanyak 10 data dan diulang dua kali pada kondisi yang sama. e. Pengujian dilakukan dengan memutar kendali setajam mungkin dengan menggunakan
rem kanan/kiri dengan pengereman penuh menyesuaikan dengan arah putar traktor sampai membuat putaran 360o, kearah kanan dan kiri. Diameter putar minimum kemudian dicatat sebanyak 10 data dan diulang dua kali pada kondisi yang sama sehingga didapatkan nilai rata-rata.
Gambar 19. Penandaan uji putar
Gambar 20. Pengukuran diameter putar traktor
Diameter lingkaran putar minimum (dalam satuan meter) dan merupakan rata-rata dari masing-masing 10 kali pengukuran pada 2 kali pengulangan
1. Putaran searah jarum jam tanpa menggunakan rem
2. Putaran berlawanan arah jarum jam tanpa menggunakan rem. 3. Putaran searah jarum jam dengan rem
4. Putaran berlawanan arah jarum jam dengan rem
Penandaan bekas jejak roda traktor (Gambar 19) menggunakan dolomit yang berwarna putih dan kontras dengan tanah. Dolomit ditaburkan secara hati-hati pada jejak roda depan traktor.
D.4. Uji Unjuk Kerja
Uji unjuk kerja bertujuan untuk menilai kemampuan kerja traktor di lahan dengan membandingkan antara kendali jarak jauh dengan kendali konvensional menggunakan roda setir. Adapun parameter yang diuji antara lain:
a. Lebar kerja efektif, yaitu lebar tanah yang terolah pada setiap satu lintasan oleh implemen pada saat pekerjaan di lahan.
Gambar 22. Pengukuran lebar kerja
b. Kedalaman kerja, diperoleh dengan cara mengukur jarak vertikal antara permukaan tanah awal dengan dasar tanah yang terolah.
Gambar 23. Kedalaman pembajakan (SNI 1212:2008)
Gambar 24. Pengukuran kedalaman
Keterangan :
KLE = kapasitas lapang efektif (ha/jam) L = luas tanah yang diolah (ha) ta = waktu total untuk operasi (jam)
Keterangan :
KLT = kapasitas lapangan teoritis (ha/jam) v = kecepatan maju rata-rata (m/detik) l = lebar kerja rata-rata (m)
c. Kecepatan maju, diperoleh dengan menghukur waktu yang diperlukan untuk menempuh jarak 15 meter. Kecepatan maju diperoleh dari rata-rata 10 kali ulangan.
Gambar 25. Pengukuran kecepatan maju (SNI 1212:2008)
d. Luas lahan yang diolah
e. Waktu total operasi, diukur sejak traktor mulai digunakan untuk operasi sampai dengan selesai dalam satu petak uji
f. Waktu kerja tidak efektif, diukur dengan mencatat waktu yang hilang karena digunakan untuk belok, pengaturan alat dan perbaikan selama operasi sampai dengan selesai dalam satu petak uji
g. Waktu kerja efektif, diukur dengan mengurangi waktu total dengan waktu kerja efektif h. Kapasitas lapangan efektif, dikur dengan membagi luas lahan yang diolah dengan waktu
total operasi
i. Kapasitas lapangan teoritis, diukur dengan mengalikan kecepatan kerja aktual dengan lebar kerja efektif
j. Efisiensi lapangan, diperoleh dengan membagi kapasitas lapang efektif dengan kapasitas lapangan teoritis
Keterangan :
EL = efisiensi lapang (%)
KLE = kapasitas lapangan efektif (ha/jam) KLT = kapasitas lapangan teoritis (ha/jam)
Keterangan :
S = Slip roda penggerak (%)
Sb = Jarak tempuh traktor saat pengolahan tanah dalam lima putaran roda penggerak (m) So = Jarak tempuh traktor tanpa beban dalam lima putaran roda penggerak (m)
k. Slip roda penggerak, diukur dengan cara pengukuran jarak tempuh 5 putaran roda seperti pada persaman berikut:
IV. HASIL DAN PEMBAHASAN
A. Konstruksi Komponen Hasil Modifikasi
A.1. Sistem Kemudi
Modifikasi sistem kemudi yang merupakan hasil penelitian sebelumnya dilakukan dengan memasang sabuk yang mentransmisikan putaran motor listrik ke roda kemudi traktor. Motor listrik dikendalikan dari remote controller yang dioperasikan oleh operator. Sebagai sumber penggerak motor listrik digunakan accu 12 Volt.
A.2. Sistem Tiga Titik Gandeng
Komponen tiga titik gandeng (three point hitch) pada penelitian sebelumnya tidak dapat difungsikan, sehingga untuk mengatur kedalaman bajak harus dilakukan secara manual dengan memutar tuas pengatur kemiringan bajak. Dalam operasi di lahan hal ini cukup menyulitkan karena operator harus turun dari traktor ketika akan berbelok sehingga tidak efisien waktu dan kedalaman yang diharapkan tidak tercapai dengan baik.
Gambar 28. Tiga titik gandeng yang telah dimodifikasi
Modifikasi dilakukan pada bagian lower link dan upper link komponen three point hitch. Sebagai pengganti batang penghubung antara lengan hidrolik dengan lower link dan pengganti upper link digunakan turnbuckle untuk keperluan uji fungsional. Turnbuckle dengan ukuran M20 digunakan sebagai batang hubung, sementara ukuran M16 digunakan sebagai pengganti upper link.
Uji fungsional dapat berlangsung dengan baik dengan kedalaman rata-rata 10-14 cm dan tanah dapat terbalik walaupun tidak sempurna dan tidak seragam hasilnya. Turnbuckle yang digunakan dapat menggantikan fungsi batang hubung dan upper link yang baik karena sifatnya yang dapat diatur panjangnya. Untuk memperkuat upper link pengganti, turnbuckle digantikan dengan pipa besi dengan ketebalan 2 cm karena pada beberapa uji fungsional sebelumnya terjadi pembengkokan pada upper link.
B. Uji Jalan Lurus dan Jari-jari Putar
B.1. Kondisi Lintasan Uji
Pengukuran penetrasi tanah dilakukan secara acak sebanyak 10 titik pengukuran pada lahan uji yang telah dipersiapkan. Dengan pengukuran ini diketahui kekerasan tanah pada saat pengujian dilakukan hingga kedalaman 20 cm. Hasil dari tahanan penetrasi tanah sebelum pengujian dilakukan disajikan pada Tabel 2, sedangkan data dan perhitungan tahanan penetrasi disajikan pada Lampiran 4.
Tabel 2. Tahanan penetrasi pada setiap kedalaman pengukuran Titik
Tahanan penetrasi tanah (kPa) pada kedalaman tertentu 5 cm 10 cm 15 cm 20 cm 1 147 588 882 1911 2 343 735 1960 2401 3 343 490 1764 2401 4 343 833 1666 2352 5 392 539 1960 2401 6 539 882 1470 2254 7 539 1127 1813 2107 8 441 1323 2352 2695 9 588 1078 2352 2695 10 833 1764 2548 2940 rata-rata 450.8 935.9 1876.7 2415.7
Gambar 30. Tahanan penetrasi tanah rata-rata
Grafik pada Gambar 30 menunjukkan terjadi peningkatan tahanan penetrasi pada lahan percobaan hingga kedalaman 20 cm. Semakin dalam tanah, semakin besar tahanan penetrasi tanah.
0 5 10 15 20 25 0 500 1000 1500 2000 2500 3000 K ed a la m a n (c m )
Pengukuran kadar air dilakukan pada 10 titik yang diambil secara acak pada lahan sebelum pengujian dilakukan dan disajikan pada Tabel 2 dan perhitungan lengkap pada Lampiran 3. Hasil pengukuran menunjukkan bahwa rata-rata kadar air pada lahan sebesar 34.65%.
Tabel 3. Kadar air pada setiap kedalaman pengukuran
B.2. Pengujian Jalan Lurus
Pengujian Jalan lurus dilakukan untuk mengetahui besarnya simpangan roda traktor dari base line ketika dikemudikan, baik secara manual oleh operator di traktor dan secara jarak jauh, dengan posisi operator mengendalikan melalui alat remote control dari tepi lahan.
Gambar 31. Uji jalan lurus
Pada Gambar 32 disajikan kecenderungan posisi roda pada saat berjalan pada lahan uji dengan kendali manual, sementara Gambar 33 menyajikan pengujian dengan kendali jarak jauh melalui remote control. Perhitungan lengkap disajikan pada Lampiran 6.
Nomor Cawan Kadar Air %
1 35.14 2 35.59 3 34.23 4 35.59 5 36.99 6 35.14 7 33.78 8 33.78 9 33.78 10 32.45 rata-rata 34.65
0 5 10 15 20 25 (15,00) (5,00) 5,00 15,00
Besar simpangan dari base line (cm)
Pengukuran 1 Pengukuran 2 Pengukuran 3
0 5 10 15 20 25 (15,00) (5,00) 5,00 15,00
Besar simpangan dari base line (cm)
Pengukuran 1 Pengukuran 2 Pengukuran 3
Gambar 32 dan Gambar 33 menunjukkan bahwa pada masing-masing cara pengujian terdapat simpangan, baik ke arah kanan dan ke arah kiri dari base line. Pada pengujian dengan sistem kendali manual, besarnya simpangan maksimum terukur yaitu 10.5 cm ke arah kiri dan pada pengujian dengan kendali jarak jauh melalui remote control, simpangan maksimum terukur yang terjadi lebih kecil, yaitu 7 cm ke arah kanan. Nilai simpangan pada pengujian dengan kendali manual lebih besar, yang dapat disebabkan faktor ketelitian operator dan faktor paralaks, dimana operator bekerja berdasarkan feeling dalam mengendalikan arah laju traktor. Sementara pada pengujian dengan kendali remote control, operator mengendalikan dari sisi lahan pada posisi berada di depan traktor pada ujung base line. Hal ini memudahkan operator memposisikan traktor tepat di tengah base line ketika traktor sudah berjalan sehingga nilai simpangan yang terjadi lebih kecil, walaupun harus kesulitan memosisikan pada saat awal pengujian dimana terjadi simpangan sebesar 10.5 cm.
B.3. Pengujian Jari-jari Putar
Pengujian jari-jari putar menunjukkan besarnya radius yang dibutuhkan traktor untuk dapat berputar penuh sejauh 360o. Besarnya nilai jari-jari putar ditampilkan pada Tabel 4-Tabel 7, dengan perhitungan dilampirkan pada Lampiran 5.
Tabel 4. Jari-jari putarsearah jarum jam tanpa rem
Jari-jari putar (m)
Manual Remote
Pengukuran 1 2.25 2.24
Pengukuran 2 2.23 2.28
Rata-rata 2.24 2.26
Tabel 5. Jari-jari putarsearah jarum jam dengan rem
Jari-jari putar (m)
Manual Remote
Pengukuran 1 1.72 1.72
Pengukuran 2 1.65 1.68
Rata-rata 1.69 1.70
Tabel 6. Jari-jari putarberlawanan jarum jam tanpa rem
Jari-jari putar (m)
Manual Remote
Pengukuran 1 2.25 2.30
Pengukuran 2 2.24 2.28
Rata-rata 2.25 2.29
Tabel 7. Jari-jari putarberlawanan jarum jam dengan rem
Jari-jari putar (m)
Manual Remote
Pengukuran 1 1.82 1.69
Pengukuran 2 1.86 1.79
Dari hasil pengamatan dan pengukuran diperoleh bahwa perbedaan jari-jari putar antata kendali manual dan kendali jarak jauh, dengan searah jarum jam tanpa dan dengan rem, serta berlawanan arah jarum jam tanpa rem menunjukan hasil yang tidak berbeda secara signifikan. Pada pengukuran dengan arah berlawanan arah jarum jam dengan menggunakan rem, terlihat perbedaan pada nilai rata-rata yaitu sebesar 0.1 m.
C. Uji Kinerja Pengolahan
C.1. Kondisi Lintasan Uji
Pengukuran penetrasi tanah dilakukan secara acak sebanyak 10 titik pengukuran pada lahan uji yang telah dipersiapkan. Dengan pengukuran ini diketahui kekerasan tanah pada saat pengujian dilakukan hingga kedalaman 20 cm. Hasil dari tahanan penetrasi tanah sebelum dan sesudah pengujian dilakukan disajikan pada Gambar 34, sedangkan data dan perhitungan tahanan penetrasi disajikan pada Lampiran 8.
Grafik pada Gambar 34 menunjukkan terjadi peningkatan tahanan penetrasi pada lahan percobaan hingga kedalaman 20 cm. Semakin dalam tanah, semakin besar tahanan penetrasi tanah. Nilai tahanan penetrasi tanah menurun setelah dilakukan pembajakan pada lahan karena tanah menjadi hancur dan lebih remah. Pada pengukuran tahanan penetrasi tanah setelah kegiatan pembajakan, nilai titik 0 pada permukaan tanah yaitu pada bagian paling atas dari guludan yang terbentuk, sehingga nilai tahanan penetrasi tanah sesudah pengolahan pada kedalaman 15-20 cm yang terukur lebih rendah daripada pengukuran sebelum pengolahan yang menggunakan permukaan tanah yang belum terolah sebagai titik 0.
Gambar 34. Tahanan penetrasi rata-rata sebelum dan sesudah uji kinerja 0 5 10 15 20 25 0 500 1000 1500 2000 K e d a la m a n (c m )
Tahanan Penetrasi (kPa)
Sebelum Pengolahan Sesudah Pengolahan
Pengukuran kadar air dilakukan pada 10 titik yang diambil secara acak pada lahan sebelum pengujian dilakukan dan disajikan pada Tabel 8 dan perhitungan lengkap pada Lampiran 7. Hasil pengukuran menunjukkan bahwa rata-rata kadar air pada lahan sebesar 34.65%.
Tabel 8. Kadar air sebelum pengolahan
Tabel 9. Kadar air setelah pengolahan
Dari data yang diperoleh pada Tabel 8 dan Tabel 9, terlihat bahwa terjadi penurunan kadar air setelah pekerjaan pembajakan selesai. Hal ini dapat disebabkan antara lain (1) waktu yang semakin siang, sehingga tanah semakin panas yang mendukung terjadinya penguapan dan (2) pembajakan menyebabkan tanah menjadi terangkat dan hancur sehingga sinar matahari mencapai kedalaman tanah yang diolah.
C.2. Pengukuran Lebar Kerja
Gambar 35 hingga Gambar 38 menunjukkan grafik pengukuran lebar pengolahan yang dilakukan. Gambar 35 dan Gambar 36 menunjukkan bahwa lebar kerja yang dihasilkan pada kendali
Nomor Cawan Kadar Air (%) 1 33.69 2 49.13 3 30.93 4 34.72 5 32.98 6 34.20 7 31.66 8 34.54 9 32.63 10 36.51 rata-rata 35.10
Nomor Cawan Kadar Air (%) 1 35.64 2 33.33 3 33.50 4 33.51 5 33.50 6 36.08 7 32.47 8 34.55 9 32.32 10 25.87 rata-rata 33.08
manual relatif teratur dan tidak menyimpang terlalu jauh, sementara Gambar 37 dan Gambar 38 menunjukkan lebar kerja pada kendali jarak jauh yang menunjukkan ketidakteraturan pada alur yang dihasilkan, yaitu pada Baris ke 10 dari sisi lahan bagian timur dan Baris pertama dari sisi lahan bagian barat. Dari pengukuran ini dapat terlihat bahwa lebar kerja pada sistem kendali manual relatif lebih teratur dibandingkan dengan kendali jarak jauh.
0 1 2 3 4 5 6 0 100 200 300 400 500 600
Jarak dari tepi lahan (cm)
Baris 1 Baris 2 Baris 3 Baris 4 Baris 5 Baris 6 Baris 7 Baris 8 Baris 9 Baris 10 0 1 2 3 4 5 6 0 100 200 300 400 500 600 T it ik p e n gu ku ra n
Jarak dari tepi lahan (cm)
Baris 1 Baris 2 Baris 3 Baris 4 Baris 5 Baris 6 Baris 7 Baris 8 Baris 9 Baris 10
Gambar 36. Grafik hasil pengujian lebar kerja kendali manual (2) Gambar 35. Grafik hasil pengujian lebar kerja kendali manual (1)
Pada kendali jarak jauh, operator dengan remote control berdiri di luar lahan pengujian, sehingga relatif sulit memposisikan traktor pada baris pengolahan dengan tepat. Data lebar kerja selengkapnya disajikan pada Lampiran 9.
C.3. Pengukuran Kedalaman Pengolahan
Pengukuran kedalaman dilakukan pada 20 baris pengolahan, dengan masing-masing 10 titik pengukuran kedalaman dengan jarak setiap 1-1.5 meter antar titik pengolahan. Nilai kedalaman rata-rata dari total 200 titik pengukuran pada pengolahan dengan kendali manual yaitu 8.95 cm dan pada kendali jarak jauh sebesar 10.11 cm. Nilai kedalaman dengan kendali jarak jauh lebih besar yang
0 1 2 3 4 5 6 0 100 200 300 400 500 Ti ti k p e n gu ku ra n
Jarak dari tepi lahan
Baris 1 Baris 2 Baris 3 Baris 4 Baris 5 Baris 6 Baris 7 Baris 8 Baris 9 Baris 10 0 1 2 3 4 5 6 0 100 200 300 400 500 600 T it ik p e n gu ku ra n
Jarak dari tepi lahan
Baris 1 Baris 2 Baris 3 Baris 4 Baris 5 Baris 6 Baris 7 Baris 8 Baris 9 Baris 10
Gambar 38. Grafik hasil pengujian lebar kerja kendali jarak jauh (2) Gambar 37. Grafik hasil pengujian lebar kerja kendali jarak jauh (1)
disebabkan operator dapat berkonsentrasi secara penuh untuk mengendalikan tuas hidrolik penggerak three point hitch. Hal ini berbeda pada kendali manual, dimana operator membagi konsentrasi antara mengatur arah laju traktor untuk memosisikan traktor tepat pada baris pengolahan dan mengendalikan tuas hidrolik penggerak three point hitch secara bersamaan. Gambar 39 dan Gambar 40 menunjukkan hasil kedalaman yang diperoleh pada pengujian dengan mengambil contoh pada 5 baris pengolahan.
0 2 4 6 8 10 12 14 16 0 1 2 3 4 5 6 7 8 9 10 K e d a la m an (c m ) Titik Pengukuran Baris 1 Baris 2 Baris 3 Baris 4 Baris 5 0 2 4 6 8 10 12 14 16 18 0 1 2 3 4 5 6 7 8 9 10 K e d a la m an (c m ) Titik Pengukuran Baris 1 Baris 2 Baris 3 Baris 4 Baris 5
Gambar 40. Grafik hasil kedalaman pengolahan kendali jarak jauh Gambar 39. Grafik hasil kedalaman pengolahan kendali manual
C.4. Pengukuran Kapasitas Pengolahan
Tabel 10. Data hasil kinerja pengolahan
Jenis Penggunaan Kendali
Data Pengukuran Manual Jarak Jauh
Waktu Pengolahan (jam) 0.5208 0.4833
Luas lahan (ha) 0.0158 0.0123
Kecepatan rata-rata (m/detik) 0.3057 0.2844
Lebar pengolahan rata-rata (m) 0.4515 0.4315
Slip roda kanan rata-rata (%) 28.45 28.85
Slip roda kiri rata-rata (%) 30.42 30.62
Kapasitas lapangan efektif (ha/jam) 0.030 0.025
Kapasitas lapangan teoritis (ha/jam) 0.050 0.044
Efisiensi pengolahan (%) 61.0 57.7
Proses pengolahan tanah menggunakan bajak singkalvdengan kendali manual dan jarak jauh dilakukan pada putaran mesin yang sama, yaitu 2700 RPM, dengan posisi gigi pada gigi 2 low. Slip yang terjadi saat pengolahan dengan kendali manual pada roda kanan rata-rata sebesar 28.45% dan roda kiri sebesar 30.42%. Pada kendali jarak jauh nilai slip pada roda kanan rata-rata 28.85% dan roda kiri rata-rata 30.62%. Perbedaan nilai slip pada roda yang sama antara kendali manual dan jarak jauh relatif kecil. Namun nilai slip rata-rata antara roda kanan dan kiri cukup berbeda. Hal ini disebabkan karena roda kanan berpijak pada baris lahan yang telah diolah sebelumnya dengan kondisi ban masuk ke baris pengolahan dan berpijak pada lapisan tanah yang lebih keras pada kedalaman 5-15 cm. Hal ini berbeda dengan roda kiri yang berpijak pada permukaan tanah yang relatif gembur.
Gambar 41. Roda kanan traktor pada alur pengolahan
Besarnya nilai slip pada pengolahan tanah disebabkan tidak berfungsinya sistem penggerak 4 roda (4 wheel drive) pada traktor Kubota B6100 sehingga hanya mengandalkan roda belakang sebagai roda penggerak. Rusaknya sistem penggerak 4 roda telah terjadi sebelum kegiatan penelitian ini dilakukan.