LAPORAN TEKNIK KENDARAAN
PERANCANGAN SISTEM SUSPENSI RANTIS KOMODO 4X4
Tugas Kuliah
Disusun sebagai salah satu syarat untuk lulus kuliah MS 4011 Teknik Kendaraan
Oleh :
Heri Indriana W. 13111070
M. Yusuf 13111073
Eka Nazarudin 13111076
FAKULTAS TEKNIK MESIN DAN DIRGANTARA INSTITUT TEKNOLOGI BANDUNG
KATA PENGANTAR
Puji syukur kami panjatkan kepada Allah Subhanahu wa Ta’ala karena atas rahmat dan karunia-Nya kami dapat menyelesaikan Laporan Desain Sistem Suspensi Rantis Komodo 4x4 ini. Kami pun mengucapkan terima kasih kepada dosen mata kuliah Teknik Kendaraan, yaitu Dr. Ir. Ignatus Pulung atas ilmu dan wawasan yang beliau berikan kepada kami.
Kami menyadari penulisan laporan ini masih jauh dari sempurna. Oleh karena itu, saran dan kritik yang membangun sangat kami harapkan demi kesempurnaan laporan ini. Terakhir, kami berharap semoga laporan ini memberikan manfaat bagi pembacanya. Terima kasih.
Bandung, 3 Desember 2014
DAFTAR ISI
ABSTRAK...2
KATA PENGANTAR...3
DAFTAR GAMBAR...5
DAFTAR TABEL...5
BAB I PENDAHULUAN...6
1.1 Latar Belakang...6
1.2 Tujuan...6
BAB II STUDI PUSTAKA...7
2.1 Bounce & Pitch Motion...7
2.2 Frekuensi Bounce & Pitch...8
2.3 Kenyamanan Berkendara dan Kendali...10
BAB III DATA...12
3.1 Kendaraan Rantis Komodo 4x4...12
3.2 Spresifikasi Rantis Komodo 4x4...12
BAB IV ANALISA...14
4.1 Penentuan Besar fn pitch dan bounce...14
4.2 Perhitungan nilai Kf...14
4.3 Penentuan batas atas dan bawah Kr...14
4.4 Penentuan nilai Kr...15
4.5 Penentuan nilai α, β, dan γ...15
4.6 Penentuan frekuensi pribadi modus getar pitch dan bounce...16
4.7 Penentuan jenis freuensi...16
4.8 Penentuan perbandingan fbouncefpitch ...17
4.9 Pengecekan Target Desain...17
5.0 Penentuan nilai konstanta redaman...17
5.1 Perhitungan gaya peredaman pada kondisi linear dan modifikasi...18
5.2 Rangkuman hasil perhitungan...19
BAB V KESIMPULAN...20
DAFTAR GAMBAR
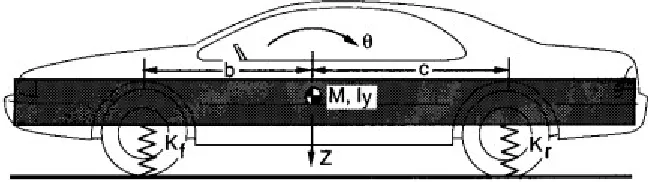
Gambar 1 Skema Gerak Bounce dan Pitch...7
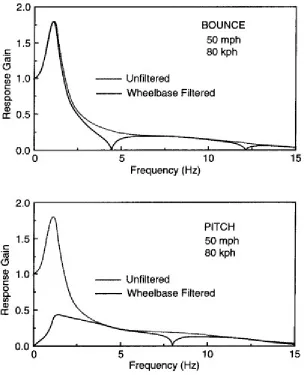
Gambar 2 Efek dari "Wheelbase Filtering"...8
Gambar 3 Pitch plane model for a car...9
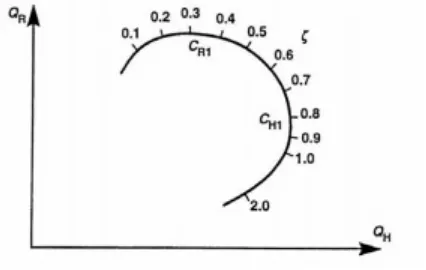
Gambar 4 Ride vs Handling Quality parameter...11
Gambar 5 Ride vs Handling Quality parameter...11
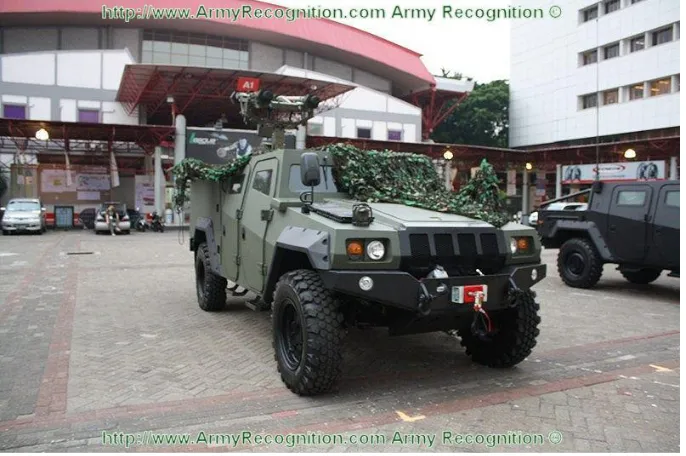
Gambar 6 Rantis Komodo...12
Gambar 7 Spesifikasi Rantis Komodo...13
Gambar 8 Dimensi Rantis Komodo...13
Gambar 9 Grafik gaya peredaman pada gandar depan...18
Gambar 10 Grafik gaya peredaman pada gandar belakang...19
DAFTAR TABEL
Tabel 1 Kr...11Tabel 2 Nilai alpa, beta dan gama...12
Tabel 3 f pitch dan f bounce...12
Tabel 4 perbandingan f bounce dan f pitch...13
Tabel 5 Gaya Peredaman...14
BAB I
PENDAHULUAN
1.1 Latar BelakangKetika seseorang mengendarai suatu kendaraan, maka yang pertama kali dirasakan adalah kenyamanan dalam berkendara. Tidak sedikit orang yang berani mengeluarkan kocek hanya untuk membuat kendaraan yang ia miliki nyaman dikendarai.
Nyaman berarti segala efek goncangan yang diakibatkan jalan yang rusak bisa diminimalisir rambatan getarannya sehingga yang dirasakan pengendara kecil. Untuk meminimalisir goncangan tersebut, suatu kendaraan harus memiliki system suspensi yang sesuai dengan kriteria kendaraan. Untuk itulah diperlukan pemilihan system suspensi terutama bagian pegas dan peredam getaran agar tercipta kenyamanan dalam berkendara.
Pada percobaan ini akan menentukan system pegas, pegas depan (front suspension) dan pegas belakang (rear suspension) sesuai dengan kriteria Olley.
1.2 Tujuan
Adapun tujuan dari percobaan ini adalah :
a) Menentukan besar koefisien pegas depan (front suspension), koefisien pegas belakang (rear suspension), koefisien redaman depan dan koefisien redaman belakang sesuai kriteria Olley.
BAB II
STUDI PUSTAKA
2.1 Bounce & Pitch MotionAkibat dari kondisi jalan dan kecepatan kendaraan, maka akan timbul beberapa gerak pada kendaraan itu sendiri. Di antaranya adalah gerak bounce dan pitch. Gerak bounce di definisikan sebagai gerak vertical dari kendaraan. Sedangkan gerak pitch merupakan gerak rotasi kendaraan terhadap pusat massa jika dilihat secara longitudinal.
Gambar 1 Skema Gerak Bounce dan Pitch
Gambar 2 Efek dari "Wheelbase Filtering"
2.2 Frekuensi Bounce & Pitch
Gerak bounce dan pitch akan sangat memengaruhi kenyamanan berkendara. Pada hamper semua kendaraan, tidak ada gerak bounce atau pitch murni yang bekerja sendiri. Mereka biasanya bekerja bersama dalam memengaruhi getaran pada
Gambar 3 Pitch plane model for a car
Untuk kemudahan analisis, didefinisikan parameter-parameter berikut:
Didefinisikan pula bahwa gerak bounce, Z dan gerak pitch, θ, maka dapat dituliskan sebagai berikut:
1. Z/θ bernilai positif maka merupakan jenis frekuensi bounce. 2. Z/θ bernilai negatif maka merupakan jenis frekuensi pitch.
Sedangkan nilai frekuensi pribadi bounce dan pitch dapat dicari dengan persamaan berikut:
Dengan f= ω/2π
2.3 Kenyamanan Berkendara dan Kendali
Kenyamanan dan keterkendalian kendaraan sangat dipengaruhi hal-hal berikut: 1. Damping ratio (0.2-0.4 untuk kendaraan penumpang)
2. Frekuensi pribadi pitch dan bounce ( < 1.3 Hz) 3. Fb/Fp < 1.2
4. Kf/Kr ≅0.7
Gambar 4 Ride vs Handling Quality parameter
BAB III
DATA
3.1 Kendaraan Rantis Komodo 4x4
Gambar 6 Rantis Komodo
3.2 Spresifikasi Rantis Komodo 4x4
Gambar 7 Spesifikasi Rantis Komodo
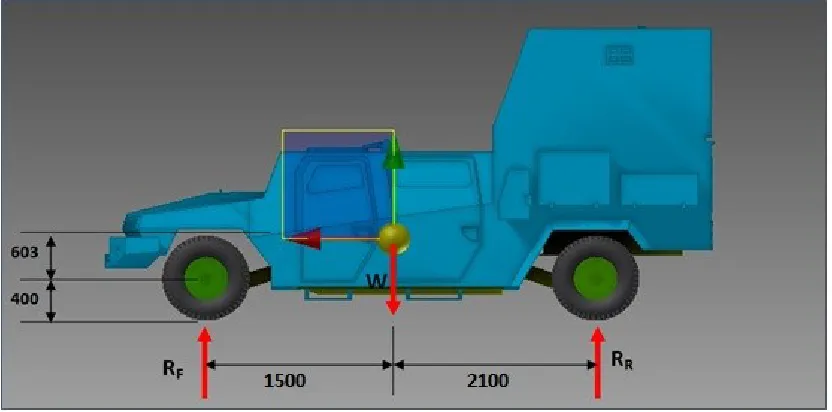
Gambar 8 Dimensi Rantis Komodo
Data dari PINDAD :
Jarak gandar depan ke pusat massa (a) = 1,5 m
Jarak gandar belakang dari pusat massa (b) = 2,1 m
BAB IV
ANALISA
Nilai frekuensi bounce dan frekuensi pitch yang ingin dicapai adalah 1,1 Hz dan 1,3 Hz. Nilai tersebut merupakan nilai frekuensi yang memenuhi kriteria Olley dan Human Body Limitation.
Sebelum menentukan besar koefisien pegas, pertama adalah menentukan kondisi kendaraan. Kondisi kendaraan yang dipilih adalah kendaraan saat empty load, yaitu kendaraan yang memiliki massa m=9500 kg.
Dalam menentukan besar koefisien suspense, perlu mengikuti beberapa tahap berikut.
4.1 Penentuan Besar fn pitch dan bounce
Supaya getaran yng dirasakan pengendara nyaman, maka perlu memilih fn pitch dan bounce diantara 1 Hz sampai 1,3 Hz. Fn yang dipilih adalah 1,2 Hz.
4.2 Perhitungan nilai Kf
Untuk menentukan besar Kf, perlu menggunakan rumus berikut.
kf = 4 π2
(
fpitch)
2mfmf =
(
a Lm)
Didapat mf = 3958,3333 kg
Kf = 225,027 kN/m
4.3 Penentuan batas atas dan bawah Kr
Untuk mendapatkannya, perlu menggunakan rumus berikut.
kr1= kf
L
kr2= kf
0,7
Dengan L = 3,6 m, a=1,5 m
Didapat, Kr1 = 209.1086731 kN/m
Kr2 = 321.4671148 kN/m
4.4 Penentuan nilai Kr
Setelah batas atas dan bawah Kr di dapat, maka bisa dipilih nilai Kr diantara nilai maksimum dan minimumnya. Disini kita mencoba memilih beberapa nilai Kr supaya didapat grafik antara Kr dengan frekuensi pitch dan bouncenya, dan dengan
fbounce fpitch
Kr (kN/m
)
209,11 210 219 229 250 290 300 310 321,5
Tabel 1 Kr
didapat K2 = 3,465 m2
Kr
(kN/m) 209,11 210 219 229 250 290 300 310 321,5
α (s-2) 45,7 45,8 46,74 47,8 50 54,21 55,27 56,32 57,53 β (m/s2) 10,7 10,9 12,88 15,09 19,73 28,57 30,78 32,995 35,53 γ (s-2) 43,4 43,52 44,72 46,06 48,87 54,23 55,57 56,91 58,45
Tabel 2 Nilai alpa, beta dan gama
4.6 Penentuan frekuensi pribadi modus getar pitch dan bounce
f1,2= 1 f1 (Hz) 1,100 1,102 1,12 1,14 1,18 1,26 1,26 1,294 1,314
f2 (Hz) 1,022 1,0225 1,0295 1,04 1,052 1,078 1,085 1,092 1,099
fbounce
fpitch 1,077 1,078 1,088 1,099 1,123 1,165 1,176 1,185 1,196
Tabel 3 f pitch dan f bounce
4.7 Penentuan jenis freuensi
Ambil satu data f1 dan f2, misal f1 = 1,1 Hz ; f2 = 1,022 Hz
=5 karena nilainya positif, maka jenis f1 adalah frekuensi bounce.
Untuk f2, θZ 2
4.8 Penentuan perbandingan fbounce
fpitch
Jika fbouncefpitch <1,2 maka desain sesuai kriteria Olley, didapat kenyamanan dalam
berkendara.
f1 (Hz) 1,100 1,102 1,12 1,14 1,18 1,26 1,26 1,294 1,314
f2 (Hz) 1,022 1,0225 1,0295 1,04 1,052 1,078 1,085 1,092 1,099
fbounce
fpitch 1,077 1,078 1,088 1,099 1,123 1,165 1,176 1,185 1,196
Tabel 4 perbandingan f bounce dan f pitch
4.9 Pengecekan Target Desain
Dari hasil perhitungan frekuensi pitch dan frekuensi bounce di atas, maka nilai Kr yang memenuhi kriteria Olley adalah 310 kN/m.
5.0 Penentuan nilai konstanta redaman
Nilai Kr dan Kf yang telah didapat di subbab sebelumnya, digunakan untuk menentukan nilai koefisien redaman.
Nilai rasio redaman dipilih nilai 0,4≤ ζ ≤1,0 karena nilai tersebut memenuhi kualitas kenyamanan dan keterkendalian yang baik.
ζ= cr+cf
2
√
(Kr+Kf)mcr+cf=2ζ
√
(Kr+Kf)mDengan nilai ζ = 0,4 yang dipilih, maka
cr+cf=2x0,4x
√
(310+225,027)x9,5=57,035kNs/mcf=b
L(cf+cr)= 2,1
cr=a
L(cr+cf)= 1,5
3,6x57,027=23,76kNs/m
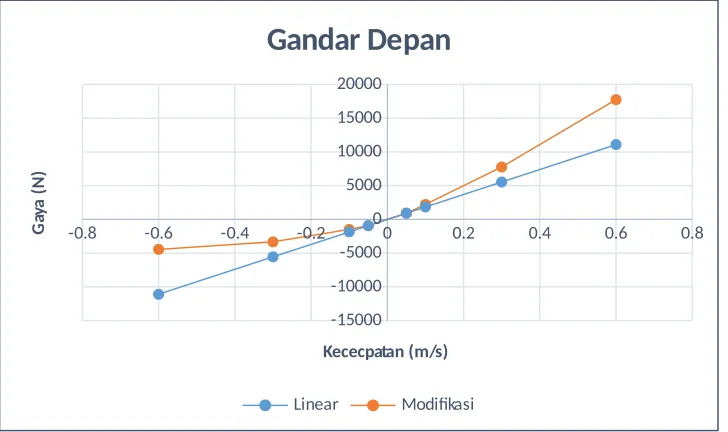
5.1 Perhitungan gaya peredaman pada kondisi linear dan modifikasi
Rumus gaya peredaman linear F=ζ
√
kmVGaya Kecepatan(m/s) Gandar Depan Gandar Belakang Linear (N) Modifikasi (N) Linear (N) Modifikasi (N)
Tekan
-0.6 -11096.61094 -4438.64438 -13024.28501 -5209.714004 -0.3 -5548.305471 -3328.98328 -6512.142505 -3907.285503 -0.1 -1849.435157 -1479.54813 -2170.714168 -1736.571335 -0.05 -924.7175785 -924.717579 -1085.357084 -1085.357084
Tarik
0.05 924.7175785 924.7175785 1085.357084 1085.357084 0.1 1849.435157 2219.322188 2170.714168 2604.857002 0.3 5548.305471 7767.627659 6512.142505 9116.999506 0.6 11096.61094 17754.57751 13024.28501 20838.85601
Tabel 5 Gaya Peredaman
-0.8 -0.6 -0.4 -0.2 0 0.2 0.4 0.6 0.8
-0.8 -0.6 -0.4 -0.2 0 0.2 0.4 0.6 0.8
Gambar 10 Grafik gaya peredaman pada gandar belakang
5.2 Rangkuman hasil perhitungan
Ini merupakan parameter yang sesuai kriteria Olley
Parameter Nilai Satuan Keterangan
Kf 225,027 kN/m Total roda kiri dan kanan
Kr 310 kN/m Total roda kiri dan kanan
Kf/kr 0,72
cf 33,027 kNs/m Total roda kiri dan kanan
Cr 23,76 kNs/m Total roda kiri dan kanan
fn pitch 1,1 Hz
fn bounce 1,3 Hz
Fn bounce/fn pitch 1,0833
ζ 0,4
-Olley 1 v - Kf/Kr ≈ 0,7
Olley 2 v - fn bounce/fn pitch < 1,2 Hz
Olley 3 v - Fn bounce dan fn pitch ≤1,3Hz
Human Body v - Fn bounce dan fn pitch sebesar 0,75 Hz sampai 3 Hz
BAB V
KESIMPULAN
Hasil perhitungan parameter
Parameter Nilai Satuan Keterangan
Kf 225,027 kN/m Total roda kiri dan kanan
Kr 310 kN/m Total roda kiri dan kanan
cf 33,027 kNs/m Total roda kiri dan kanan
Cr 23,76 kNs/m Total roda kiri dan kanan
fn pitch 1,1 Hz
fn bounce 1,3 Hz
ζ 0,4
-Olley 1 v - Kf/Kr ≈ 0,7
Olley 2 v - fn bounce/fn pitch < 1,2 Hz
Olley 3 v - Fn bounce dan fn pitch ≤1,3Hz
Human Body v - Fn bounce dan fn pitch sebesar 0,75 Hz sampai 3 Hz
Gaya Peredaman
Gaya Kecepatan(m/s) Gandar Depan Gandar Belakang Linear (N) Modifikasi (N) Linear (N) Modifikasi (N)
Tekan
-0.6 -11096.61094 -4438.64438 -13024.28501 -5209.714004 -0.3 -5548.305471 -3328.98328 -6512.142505 -3907.285503 -0.1 -1849.435157 -1479.54813 -2170.714168 -1736.571335 -0.05 -924.7175785 -924.717579 -1085.357084 -1085.357084
Tarik