Penyelesaian Model Sistem Gerak Bebas Teredam
Sistem Gerak Bebas Teredam adalah sistem gerak dengan parameter Gaya Luar F(t)=0 dan Peredam d≠0
.
Untuk mengilustrasikan gerak benda pada sistem pegas bebas teredam pada bahasan berikut akan diuraikan tiga kasus, yaitu sistem teredam kurang (underdamped), sistem teredam kritis (critically damped), dan sistem teredam lebih (overdamped), dimana masing-masing ditentukan dari nilai diskriminan pada akar Persamaan Karakteristik. Di sini akan ditunjukkan gambaran/perilaku gerak pada tiga kasus yang dimaksud.Model sistem gerak benda bebas teredam:
.
+ .
+
= 0
Persamaan karakteristik dari model sistem gerak benda bebas teredam adalah:
]. ^
-+ _. ^ + ` = ,
sehingga akar-akar persamaan karakteristiknya:
^
(,-=
−_ ± √_
-
− a]`
-]
Sistem Teredam Kurang (underdamped)
, b_
-− a]` < 0d
Solusi persamaan gerak benda pada sistem teredam kurang (underdamped) didapatkan jika
− 4
< 0
, dimana akar-akar persamaan karakteristik adalah:!
",=
− ± $√4
2
−
persamaan solusinya adalah: (lihat pembahasan pada subbab 4.5)
% = '
(e
(α f gβ)&+ '
-e
(α h gβ)&; _e/ij/
α
= −_/-] ,
β
=
0(4
2
− )
= e
(h / 9)(k')*
β
+ l *./
β
)
bentuk satu sinus/cosinus persamaan di atas adalah:
= ?Q
(h / 9)@AB (
β
− C)
I C =
n
m
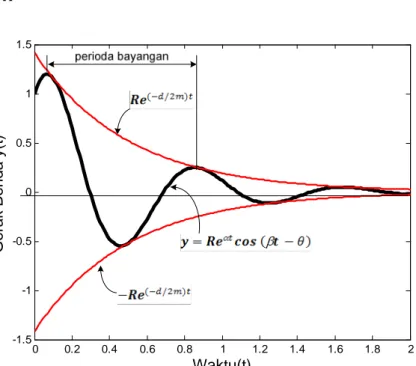
0 0.2 0.4 0.6 0.8 1 1.2 1.4 1.6 1.8 2 -1.5 -1 -0.5 0 0.5 1 1.5 Waktu(t) G e ra k B e n d a y (t )Gambar Osilasi pada Gerak Benda Bebas Teredam Kurang
Program MATLAB untuk Gambar Osilasi pada Gerak Benda Bebas Teredam Kurang sebagai berikut:
%gerak benda bebas teredam kurang %R=2^0.5, alfa=-2, beta=8 teta=pi/4 clear all; close all; clc; t=(0:0.01:2); yt=2^0.5*exp(-2*t).*(cos(8*t-pi/4)) plot(t,yt,'k','linewidth',3) hold on amp1=2^0.5*exp(-2*t) plot(t,amp1,'r','linewidth',2) hold on amp2=-2^0.5*exp(-2*t) plot(t,amp2,'r','linewidth',2)
ylabel('Gerak Benda y(t)','fontsize',14)
Faktor kosinus
')* (
β
& − C)
menyebabkan osilasi bernilai antara +1 dan -1. Perioda osilasi jika dilihat pada Gambar bukan perioda asli atau sering disebut sebagai perioda bayangan (quasi-period) atau perioda teredam (damped-period), didefinisikan sebagai:; =
2o
p =
2o
0(4
− )
2
=
4o
0(4
− )
Frekuensi dinyatakan sebagai frekuensi bayangan (quasi frequency) atau teredam (damped-frequency), yaitu
: =
qr. Sedangkan
3e
(h / 9) disebut amplitudo teredam (damped-amplitude).Sistem Teredam Kritis (critically damped)
, b_
-= a]`d
Pada sistem teredam kritis
= 4
sehingga akar-akar persamaan karakteristik sama yaitu:!
",=
−
2
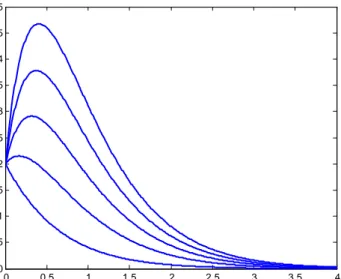
Persamaan solusinya :0 0.5 1 1.5 2 2.5 3 3.5 4 0 0.5 1 1.5 2 2.5 3 3.5 4 4.5 5 waktu (t) G e ra k B e n d a y (t )
Gambar Gerak Benda pada Sistem Gerak Bebas Teredam Kritis (c1, c2 positif)
Program MATLAB untuk Gambar Gerak Benda pada Sistem Gerak Bebas Teredam Kritis (c1, c2 positif) adalah sebagai berikut:
%gerak benda teredam kritis y=(c1+c2t)exp((-d)/2m)t) %c1=2; c2=1:5:25; -d/2m=-2 clear all; close all; clc; t=(0:0.01:4); for c2=1:5:25 y1=2*(exp(-2*t)); y2=c2*t.*(exp(-2*t)); yt=y1+y2 plot(t,yt,'b','linewidth',2) hold on end
xlabel(' waktu (t)','fontsize',14)
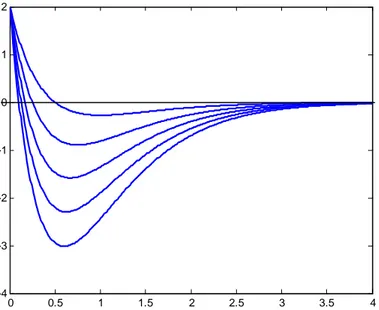
0 0.5 1 1.5 2 2.5 3 3.5 4 -4 -3 -2 -1 0 1 2 waktu (t) G e ra k B e n d a y (t )
Gambar Gerak Benda pada Sistem Gerak Bebas Teredam Kritis (c2 negatif)
Program MATLAB untuk Gambar di atas sebagai berikut:
%gerak teredam kritis y=(c1+c2t)exp((-d)/2m)t) %c1=2; c2=-20:4:-2; -d/2m=-2 clear all; close all; clc; t=(0:0.01:4); for c2=-20:4:-2 y1=2*(exp(-2*t)); y2=c2*t.*(exp(-2*t)); yt=y1+y2 plot(t,yt,'b','linewidth',2) hold on end
xlabel(' waktu (t)','fontsize',14)
Sistem Teredam Lebih (overdamped)
, b_
-> 4 d
Pada sistem teredam lebih
> 4
sehingga akar-akar persamaan karakteristik adalah:^(,-
=
−_ ± √_
-]
-− a]`
Solusi umum persamaan gerak pada sistem teredam lebih adalah:
%(&) = '(e
^(&+ '-e
^-&Pada kenyataannya nilai ^(,-< 0 sehingga untuk & → ∞ maka %(&) = ,. Jika ( ) kita turunkan, yaitu:
%
′(&) = '(^(e
^(&+ '-^-e
^-&= e
^(&b'(^(
+ '-^-e
(^-h^()&d
maka%
Y(&) = ,
hanya jikab'(^(
+ '-^-e
(^-h^()&d = ,
Jadi secara umum gerak benda pada pegas pada sistem teredam lebih mempunyai perilaku yang sama dengan sistem teredam kritis, yaitu
& → ∞
maka%(&) = ,
dan hanya memiliki satu titik puncak maksimum dan minimum pada& > 0
seperti ditunjukkan pada Gambar.Contoh kasus Pengaruh Peredaman:
Sebuah sistem gerak benda pada pegas dengan peredam dimodelkan oleh persamaan berikut:
+ .
+ = 0
(0) = 1;
′(0) = 0
Jika d=1, 2 dan 4, tentukan persamaan gerak benda! Bagaimana pengaruh perubahan nilai konstanta peredaman d pada gerak benda?
Penyelesaian:
persamaan karakteristik dari model persamaan sistem adalah:
! + . ! + 1 = 0
akar-akar persamaan karakteristik:
!
",=
− ± √ − 4
2
a. Jika d=1,− 4 < 0
disebut sistem teredam kurang!
",= −
1
2 ± $
√3
2
solusi umum persamaan gerak benda:= Q
(h / 9)(m@AB
β
+ n B$I
β
)
= Q
(h"/ )vm@AB
√3
2
+ n B$I
√3
2
w
subsitusi y(0) = 1, didapatkan:= Q
sh"tvm@AB
√3
2 + n B$I
√3
2 w
= m@AB 0 = 1 → m = 1
subsitusi y′(0) = 0, didapatkan: Y= −
1
2 Q
(h"/ )vm@AB
√3
2 + n B$I
√3
2 w
+ Q
(h"/ )v−m
√3
2 B$I
√3
2 + n
√3
2 @AB
√3
2 w
0 = −
1
2 (m@AB0 ) + vn
√3
2 @AB 0w
0 = −
1
2 (1 ) + vn
√3
2 w → n =
1
√3
maka solusi khusus gerak benda sistem teredam kurang adalah:
= Q
(h"/ )v@AB
√3
2 +
√3
1
B$I √
2 w
3
bentuk satu sinus/cosinus:=
2
√3
Q
(h"/ )v@AB
√3
2 −
o
6w
b. Jika d=2,− 4 = 0
disebut sistem teredam kritisAkar-akar persamaan karakteristik adalah:
!
",= −1
solusi umum persamaan gerak benda:= (@"
+ @ ) Q
h subsitusi y(0) = 1, didapatkan:(0) = (@
"+ @ 0) Q
h→ @
"= 1
subsitusi Y(0) = 0,, didapatkan:Y
(0) = @ Q
h− (@"
+ @ 0) Q
h0 = @ − @"
→ @ = 1
maka solusi khusus gerak benda sistem teredam kritis adalah:
= (1 + ) Q
hc. Jika d=4,
− 4 > 0
disebut sistem teredam lebih Akar-akar persamaan karakteristik adalah:!
",=
− ± √ − 4
2
= −- ± √x
solusi umum persamaan gerak benda:
( ) = @"Q
yz+ @ Q
y= @"Q
(h f√{)+ @ Q
(h h√{) subsitusi y(0) = 1, didapatkan:1 = @"Q
bh f√{d+ @ Q
bh h√{d1 = @
"+ @
subsitusi y′(0) = 0, didapatkan:0 = @"!
"Qyz+ @ ! Q
y0 = @"(−2 + √3) + @ (−2 + √3)
dari dua persamaan konstanta yaitu:@
"+ @ = 1
dan @"(−2 + √3) + @ (−2 + √3) = 0diperoleh
@ =
−2 + √3
2√3
maka solusi khusus gerak benda sistem teredam lebih adalah:
% =
- + √x
-√x
e
(h-f√x)&+
−- + √x
-√x
e
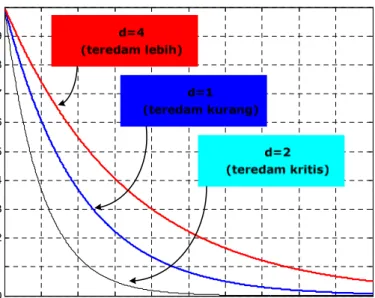
(h-h√x)&Pengaruh konstanta redaman d pada sistem gerak benda dijelaskan sebagai berikut:
• d=1 maka gerak benda ( ) → 0 menurut fungsi eh,.•&
• d=2 maka gerak benda ( ) → 0 menurut fungsi eh&
• d=4 maka gerak benda ( ) → 0 menurut fungsi e(h-h√x)&
= e
h,.x& disimpulkan bahwa pada d=2 (teredam kritis) gerak benda paling cepat ke posisi setimbang/y(t)=0, sedang paling lama pada d=4 (teredam lebih). Hal ini juga dapat dilihat pada Gambar0 1 2 3 4 5 6 7 8 9 10 0 0.1 0.2 0.3 0.4 0.5 0.6 0.7 0.8 0.9 1 Waktu(t) G e ra k B e n d a y (t )
Latihan Soal:
Tentukan komponen amplitudo, frekuensi dan sudut fasa pada model sistem gerak benda berikut! Gambarkan dengan MATLAB persamaan gerak benda-nya!
1. ( ) = 4Q
h@AB (2 − o)
2. ( ) = 3Q
h@AB s√3 −
o
3t
3. ( ) = 5Q
h@AB s −
r {t
4. ( ) = 3Q
h@AB (5 − o)
Tentukan apakah gerak benda berikut diklasifikasikan dalam sistem teredam kurang(underdamped), teredam kritis (critically damped) atau teredam lebih (over damped)!